Abstract
This paper presents the design of a disturbance observer-based controller that regulates the output voltage of three-phase four-leg voltage source inverters (VSIs) deployed for grid-forming operation in Renewable Energy-based Distributed Generation (REDG) Systems. The primary objective of the controller is to provide a symmetric and sinusoidal voltage at the output of the VSI when supplying highly unbalanced and nonlinear loads. The controller employs the feedback linearization (FL) technique and incorporates a disturbance observer (DO) to address a range of disturbances that include oscillations resulting from unbalanced loads, harmonics generated by nonlinear loads, and non-oscillatory disturbances. Notably, the controller adopts a direct control scheme without the need for nested current control loops and does not use any transformation frames. Simulation studies and experimental investigations were conducted to assess the controller’s performance under various load conditions, including both linear and nonlinear types, as well as load transients. The findings demonstrate the controller’s capability to accurately track references while complying with the IEEE power quality standards for the tested conditions.
1. Introduction
Renewable Energy-based Distributed Generation (REDG) has been undergoing significant advancements to gain more predominance in future power generation. In these systems, three-phase voltage source inverters (VSIs) play an essential role in converting DC power extracted from renewable sources into AC power for integration with the utility grid. In the absence of a stable grid connection, the VSI is expected to function autonomously to supply local AC loads. This mode, known as the grid-forming mode, is particularly vital, given that the quality of voltage is significantly influenced by factors such as inconsistencies in system parameters and abrupt load switching. Furthermore, the issue of voltage quality is aggravated when the VSI is required to handle highly unbalanced linear and nonlinear loads [1,2]. Such loads draw asymmetric and distorted currents, leading to unbalanced and harmonically distorted voltages. These voltage irregularities can pose significant challenges to electrical equipment, causing issues such as mechanical vibration, overvoltage, overheating, and torque fluctuations. Autonomous microgrids adhere to similar power quality standards as Hybrid Power Systems (HPSs) and Uninterruptible Power Supplies (UPSs) [3,4]. According to IEEE standards, maintaining the Voltage Unbalanced Factor (VUF) and total harmonic distortion (THD) below 2% and 5%, respectively, is crucial for sensitive loads [4]. As a result, the implementation of a rigorous voltage control scheme becomes imperative for three-phase grid-forming VSIs.
The three-phase VSI utilizes a four-wire topology that provides a path to the neutral current that arises from unbalanced three-phase loads [2,5]. Among the two popular four-wire topologies, namely the split DC link and four-leg topology, the split DC-link topology establishes a neutral connection at the midpoint of the DC-link capacitor thereby allowing the neutral current to flow through the split capacitors. While this topology is simple, it brings about the requirement for a sufficiently large capacitance to reduce the voltage ripple and the disparity in voltages across the split capacitors. On the other hand, the four-leg topology connects the neutral to an additional fourth switching leg of the inverter. This topology presents some distinct advantages over the split link, which includes enhanced utilization of the DC link voltage and the capacity to control the zero-sequence voltage [5]. As a result, it is widely preferred in three-phase power generation systems. However, when four-leg inverters supply nonlinear and unbalanced loads, they introduce harmonic oscillations of various orders into the system, which can adversely affect the functioning of the controller and, consequently, the VSI output [1]. To optimize the performance of the four-leg topology operating in grid-forming mode in the presence of these oscillations, a proper control scheme is essential.
Many of the earlier controllers proposed for the voltage control of VSIs fall within the domain of linear control [6,7,8,9,10,11,12,13,14,15,16,17,18]. Linear controllers, particularly the commonly used Proportional-Integral (PI) and Proportional-Integral-Derivative (PID) regulators, are known for their simplicity in design. PI controllers are typically implemented when designing controllers using the dq reference frame [7,8,9,10]. For balanced AC loads, the dq transformation produces DC signals that can be effectively controlled with PI controllers. However, in the case of unbalanced loads, the transformed signals contain low-frequency oscillating components, leading to steady-state errors with PI controllers. Consequently, PI controllers are considered less reliable for addressing unbalanced loads. To address this limitation, a solution proposed in [8] involves the application of the Sequence Decomposition (SD) strategy that has been widely employed to tackle unbalanced three-phase systems [19,20,21,22]. It involves the separation of the positive, negative, and zero sequences from the three-phase voltage and current signals. Each sequence is then transformed to the dq frame and controlled using PI controllers. However, this method has introduced multiple parallelly operating PI controllers [8] thereby elevating the controller complexity. The cross-coupling of d and q axes further complicates implementation with multiple controllers. Additionally, transforming the zero-sequence component directly into the dq frame requires additional processing, such as creating a virtual quadrature component [22].
Controllers designed in the αβ reference frame are considered advantageous over dq controllers as they generate and track time-varying signals. Proportional-resonant (PR) controllers are widely employed for this frame of transformation due to their ability to eliminate steady-state errors in oscillating waveforms and compensate for multiple harmonics [11,12,13,14,15,16,17,18]. The literature provides numerous examples of PR-αβ based controllers for voltage source inverters (VSIs) supplying unbalanced loads [13,16]. In the case of nonlinear loads, multiple PR regulators are utilized to compensate for various harmonic multiples, aiming to achieve a clean sinusoidal voltage waveform with reduced total harmonic distortion (THD) [10,16]. To enhance performance with unbalanced and nonlinear loads, controllers that combine PI-dq and PR-αβ, along with the Sequence Decomposition (SD) scheme, have been proposed [15]. However, the aforementioned linear controllers involve multiple levels of processing of the original voltage and current signals, like the Fortescue transformation [23] for the extraction of sequences, the DSC technique for decoupling of sequences [19], virtual quadrature generation [22], etc., leading to increased computational burden and controller complexity. Moreover, the PI and PR controllers used in SD-based control schemes are often employed within a cascaded control scheme [11,12] where an inner current control loop is nested within the outer voltage loop for improved controller stability. This indirect form of control diminishes the controller’s ability to achieve fast transient dynamics and adds to the complexity, requiring proper tuning for both loops to attain the desired performance.
Recent controllers in the nonlinear domain have predominantly been designed in the abc frame where the three-phase voltages are directly taken as input to the controller without the application of any transformation, simplifying the control algorithm significantly [24]. Some of the nonlinear controllers for VSI proposed in the literature include sliding mode control [25,26,27,28,29], Model Predictive Control (MPC) [30,31,32,33], repetitive control [34,35,36,37], Feedback linearized control [38,39,40], and passivity-based control [40,41]. These control algorithms are specifically designed to enhance the performance of VSIs, placing a major emphasis on achieving fast dynamic response and robustness to external disturbances. Model Predictive Control (MPC) is a model-based predictive control scheme that optimizes a desired cost function to generate a switching sequence, directly controlling the switching without the need for an indirect control of current. MPC offers advantages such as not requiring Pulse Width Modulation (PWM) to modulate the switches, providing fast dynamic response, and robustness to load transients [29]. However, the variable switching frequencies produced with MPC may be unsuitable for controlling a four-leg VSI, complicating Electromagnetic Compatibility (EMC) and common mode noise-related issues. Moreover, for unbalanced and nonlinear loads, the existing MPCs have laid very little emphasis on the periodic oscillations which is the underlying problem for controllers dealing with imperfect loads. While many nonlinear controllers exhibit increased complexities in designing for nonlinear systems, feedback linearization control (FLC) offers a less complicated solution. The feedback linearization technique transforms the original nonlinear system to cancel out nonlinearities, enabling the application of linear control methods like state feedback [24]. While FL control simplifies the control design process, the classic design suffers from poor robustness, especially to parametric uncertainties and load-related oscillations.
The Repetitive controller (RC) offers a straightforward approach to address systems with periodic oscillations by treating them as disturbances that affect the system. This technique functions based on the concept of Iterative Learning Control (ILC) [42] and utilizes the internal model principle [43] to eliminate periodic disturbances. RC can be considered analogous to a network of multiple resonant controllers and has demonstrated low THD in voltage due to the periodic disturbance rejection [44]. However, the basic RC design lacks stability and error convergence guarantees, leading to its combination with other control methods to overcome these limitations [33]. Additionally, RC exhibits a slow dynamic response to fluctuating load conditions, introducing significant delay time and hindering satisfactory performance under nonperiodic disturbances.
The advantages of a disturbance observer (DO)-based approach to attenuate disturbances are well-documented [45]. This approach is often applied in conjunction with other controllers to mitigate both known and unknown disturbances, encompassing constant and periodic disturbances for VSIs. The DO approach involves generating an accurate estimate of the unknown disturbance and feeding it to the main controller through a feedforward scheme for disturbance compensation. While DOs share functional similarities with repetitive control, the key difference lies in their focus—repetitive control targets periodic disturbances, while DOs can address uncertainties and disturbances occurring continuously or discontinuously. Several types of DOs have been proposed in the literature for periodic disturbance rejection in three-phase inverter systems. The Generalized Extended State Observer (GESO) [46], a class of DO, is applied to a grid-connected inverter affected by disturbances disrupting the Phase-Locked Loop function [47]. While the GESO is capable of compensating for mismatched disturbances, it is designed to tackle disturbances that are of slow-varying nature. Therefore, in the presence of regular periodic disturbances, this approach may not provide higher control performance. Generalized Proportional Integral Observers (GPIOs) have been applied to reject system uncertainties, such as shaft position in the Permanent Magnet Synchronous Generator system [48], and mitigate load torque disturbance and other time-varying parameter uncertainties associated with Induction Motor Systems [49]. Similar to the GESO, the GPIO also has limitations in compensating for slow-varying disturbances. Furthermore, the GPIO lacks sufficient modelling analysis of the disturbances and therefore may yield an inaccurate estimate. In [50], a Harmonic DO (HDOB) was specifically designed to provide compensation for the targeted harmonic frequency in the voltage control of a single-phase inverter, resulting in an output voltage with acceptable THD. Likewise, a DO to mitigate second harmonic frequency in an unbalanced three-phase grid-connected inverter is proposed in [51]. DOs that have been derived from a general class called nonlinear disturbance observer (NDOB), designed for nonlinear systems, have been applied to reject harmonic disturbances in grid-connected [51] and standalone three-phase inverters [52]. It is important to note that while the aforementioned DOs focus on rejecting periodic harmonic oscillations induced by unbalanced and nonlinear conditions, they do not account for the multiple types of disturbances that can occur in VSI systems that could include disturbances of a non-oscillatory nature, for instance, constant disturbances. For accurate tracking performance of the controller for grid-forming VSIs under imperfect loading scenarios, it becomes necessary to have a DO that compensates for multiple types of disturbances composed of oscillatory and non-oscillatory disturbances.
In this work, the following contributions are made:
- A novel control design for the grid-forming voltage control of four-leg VSIs is proposed. The design integrates a principal controller whose design is based on the feedback linearization (FL) method and a DO that is capable of compensating for multiple types of disturbances that include both non-oscillatory and oscillatory disturbances. This control is designed with the aim to equip the grid forming VSIs to reject the oscillating disturbances induced by imperfect loads and, thereby, achieves precise tracking performance by generating a balanced and smooth sinusoidal three-phase voltage, aligning with the standards set by IEEE [3,4];
- Secondly, it is worth noting that limited studies have explored the applicability of FL control for grid-forming applications that specifically address the challenges posed by unbalanced and nonlinear loads. Previous FL-based voltage controllers for VSIs, such as those presented in references [37,39], have not conducted detailed investigations into compensating for unbalanced loads. Furthermore, these controllers lack the capability to address disturbances originating from distorted loads and load disturbances. Therefore, the proposed controller integrates a DO into the principal FL controller that specifically targets the oscillatory disturbances;
- Thirdly, the existing FL-based grid-forming voltage controllers [38,39,40] employ the typical control scheme for voltage control which is the cascaded control structure with a nested current control loop. In contrast, the proposed FL controller deviates from the conventional cascaded approach by introducing a direct voltage control scheme. Furthermore, the proposed controller adopts the natural reference frame without employing any transformation frame.
The forthcoming sections of this paper are organized as follows. Section 2 defines the model of the four-leg VSI used for designing the controller, Section 3 describes the formulation of the composite control design that comprises the principal controller and the DO. Section 4 explains the PWM scheme used for four-leg converters. Section 5 outlines the criteria and methods used for evaluating the performance of the proposed controller. Section 6 discusses the results of the simulations and the inferences drawn from them. Finally, Section 7 briefs the concluding remarks.
2. System Modelling
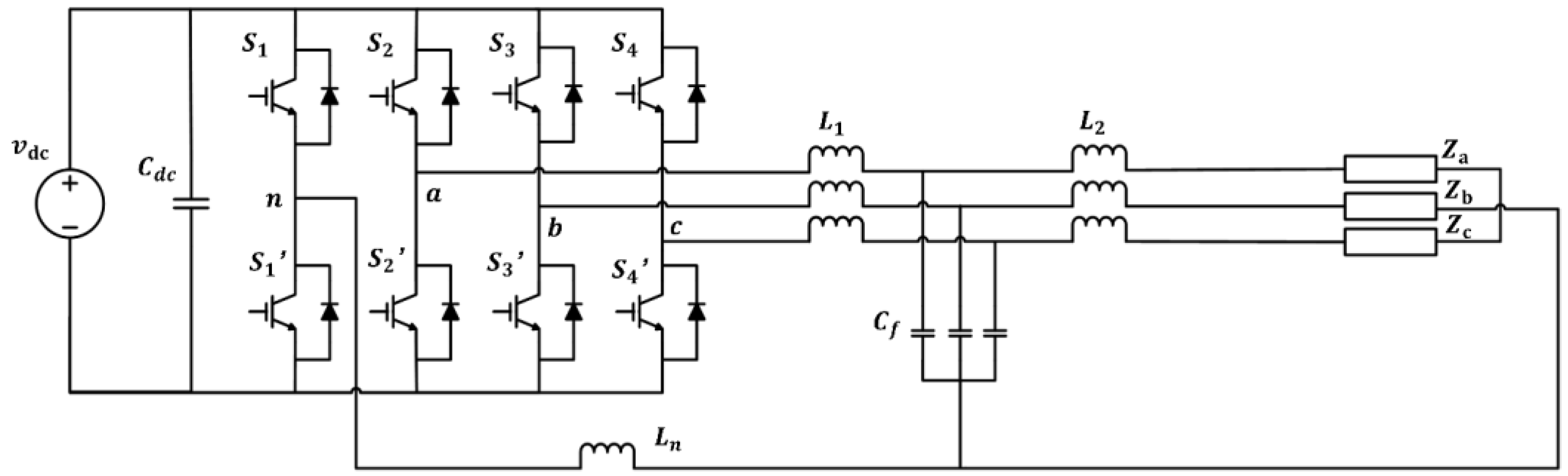
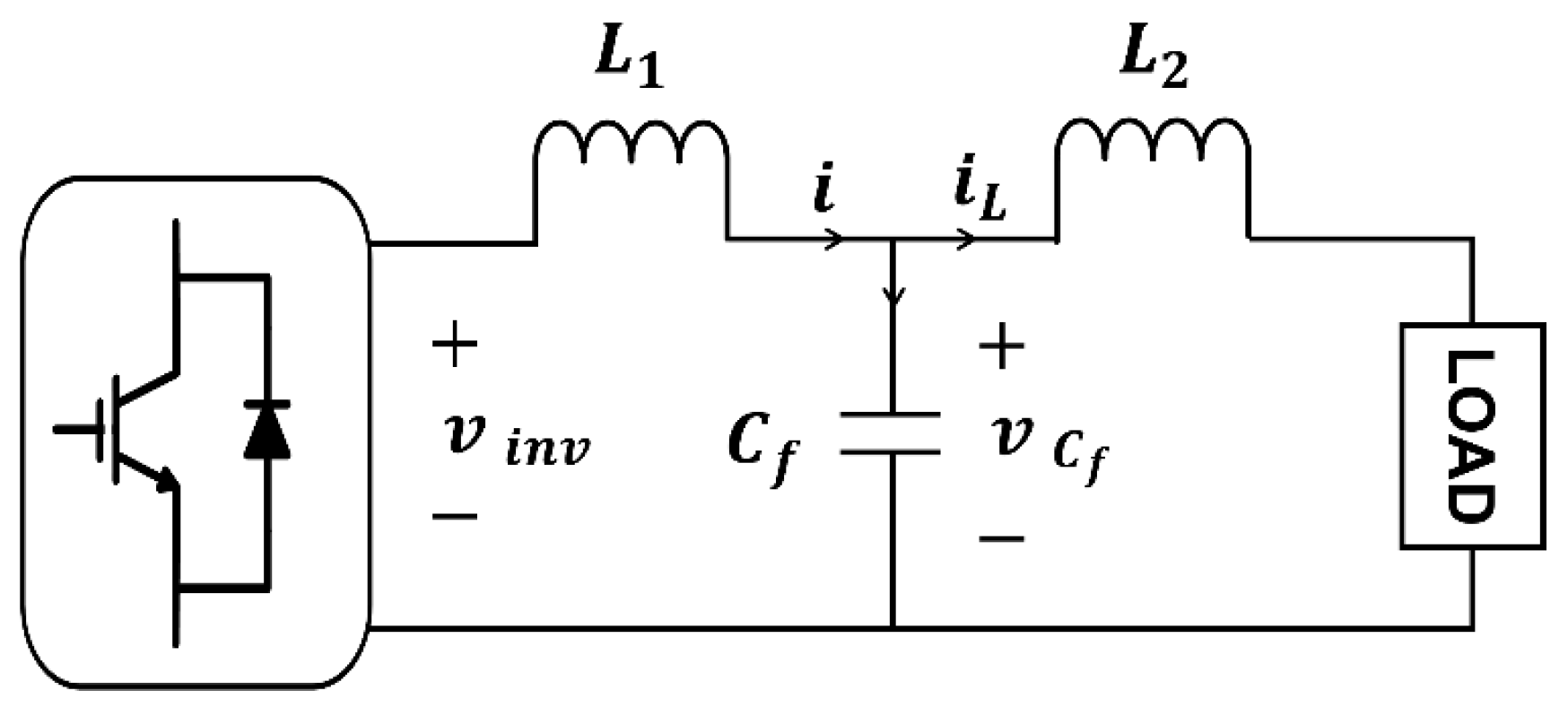
Figure 1 illustrates the 4-leg topology of a grid-forming three-phase VSI employed in REDG systems. In this configuration, the neutral point is connected to the fourth leg via an inductor . Renewable energy sources and the corresponding power converters serve as the sources for grid-forming VSIs used in DG-based microgrids and may thus be viewed as the ideal DC voltage source. The LCL filter, connected to the VSI’s output, effectively filters out high harmonic frequencies. The inductor that is part of the LCL filter is assumed to be a part of the load in this work. By simply applying Kirchhoff’s Laws to the equivalent per-phase circuit of the VSI filter that is shown in Figure 2, the differential equations defining the filter dynamics can be defined as
where is the voltage across the filter capacitor , is the current across inductor , is the load current, and is the reference voltage for the VSI.
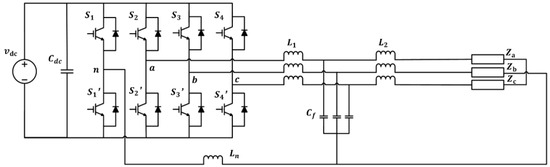
Figure 1.
4-leg VSI topology used for grid-forming applications.
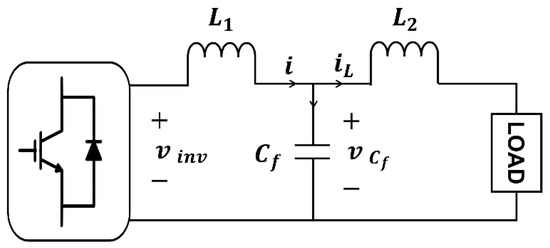
Figure 2.
Per-phase equivalent circuit of the LCL filter connected at output of 3-ϕ VSI.
Considering that the disturbances and affect the VSI system, Equations (1) and (2) can be expressed as
where the state variables and the input . For a more general state space representation, the model can be rewritten as
where
and .
The disturbance is assumed to comprise a constant component and a sinusoidally oscillating component , which will be discussed further in Section 3.
3. Control Design
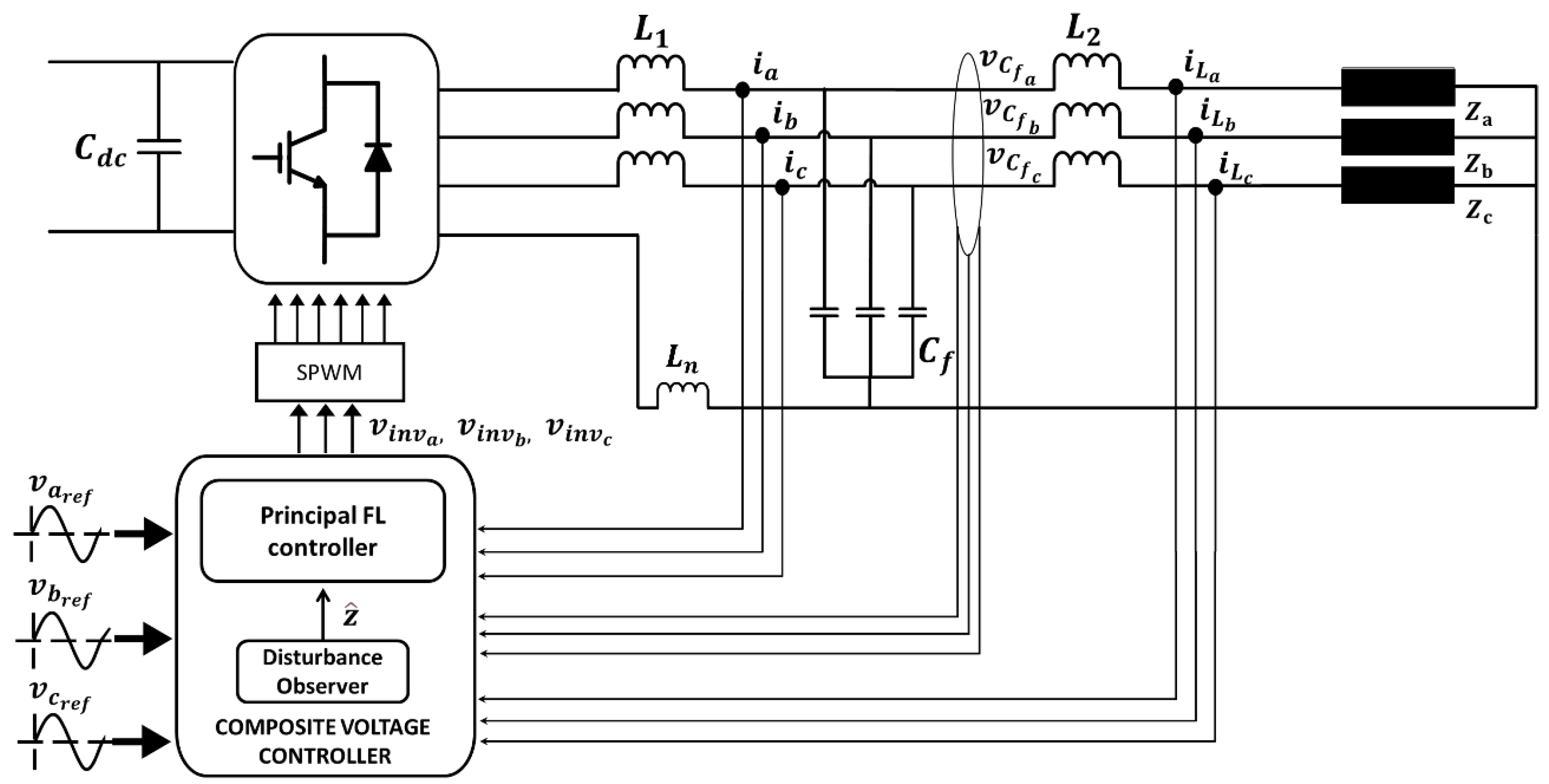
The controller adopts a composite control structure that integrates a principal controller with an embedded disturbance observer (DO), as illustrated in Figure 3. The principal controller is responsible for accurate tracking of the output voltage while the DO estimates the disturbance that comprises the non-oscillatory and oscillatory disturbances induced by unbalanced and nonlinear loads. The principal controller and DO function conjointly as a single unit to achieve the objective of providing a smooth, sinusoidal, and balanced three-phase voltage waveform at the VSI’s output that complies with the IEEE standards [3,4] when supplying highly unbalanced and nonlinear loads. The design methodology for the principal controller is elaborated in Section 3.1 and Section 3.2 whereas Section 3.3 and Section 3.4 explain the design approach for the disturbance observer.
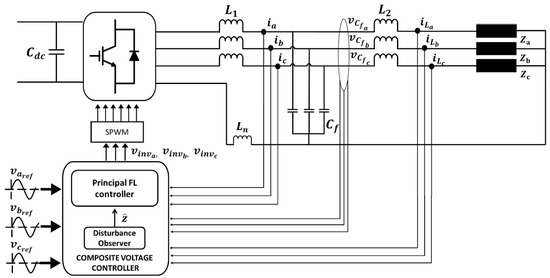
Figure 3.
Schematic of the proposed controller.
3.1. Design of Principal Controller
The primary objective of the principal controller is to ensure precise regulation of the filter voltage at the output of the grid-forming VSI, particularly in scenarios involving unbalanced and nonlinear loads. A control scheme that directly controls by modulating the VSI switches is designed to achieve faster dynamics as compared to the traditional approach of nested current control. The method of feedback linearization (FL), which is a popular method within the domain of nonlinear control, is adopted for the design of the control scheme. The FL method facilitates the application of simple linear control to nonlinear systems [24]. The method involves an algebraic linear transformation of the system to eliminate the inherent nonlinearity. Once cancelled, linear controllers such as state feedback control can be easily implemented. It is worth noting that the linearization applied here differs from conventional linear theory, as it remains valid across a broad operational range. Assuming the availability of all system states for feedback, the initial step in the FL method requires determining the relative degree ρ of the system. Differentiating Equation (6) leads to the following conditions:
From (7), the relative degree ρ of the system can be determined as 2. Since ρ is equal to the order of the system, the presence of zero dynamics in the system can be ruled out. The time derivatives of the output (6) can be expressed as
Following the design methodology of feedback linearization [24], a state-feedback control can be designed as
where , is the tracking error, and and are the control gains. The terms and are defined as
can be expressed as
Using (11), (12), and (13), the controller in (10) can be alternatively expressed as
where
and
It must be noted that very limited information is available about the disturbance terms and . Therefore, for practical implementation of the above controller, the estimation of the variables and becomes necessary.
3.2. Stability Criterion for Principal Controller
Theoretically, to ensure the asymptotic stability of the closed-loop control, the control gains and must be appropriately selected to meet the stability condition. Substituting (10) into (9) yields the controller error dynamics as shown below:
The characteristic polynomial of the controller error dynamics is provided in (18). To satisfy the stability condition, the control gains must be selected such that the given polynomial is Hurwitz, i.e., the poles and of must contain negative real parts. This can be achieved by choosing as
The parameters and are selected such that the closed-loop poles are positioned at specific locations in the left-half of the complex plane. and can be alternatively expressed in terms of the parameters and as
Therefore, the stability of the closed-loop system can be ensured by assigning the values in (21) for the control gains.
3.3. Design of Disturbance Observer
The disturbance variables present in the system must be estimated and fed to the controller to ensure effective disturbance attenuation thereby ensuring the accuracy of the output tracking. The estimated values of the disturbance variables are denoted as and , using which the controller (14) can be modified as
As already mentioned, the disturbances and are assumed to be composed of a constant component and a sinusoidally oscillating component with a frequency of that represents the oscillations induced by the unbalance and nonlinearity of loads as shown below:
where the amplitude and the phase are unmeasurable and, therefore, unknown. The values for must be specified based on the specific frequencies that are targeted for attenuation.
Let be an auxiliary disturbance such that
By differentiating the disturbance variables, it can be seen that
where Defining a new aggregate state variable that contains all the following variables,
Combining (26) and (27), the dynamics of disturbance can be defined by the system expressed as
here the matrix is defined as a 4 6 matrix to match the order of the .
Following [45], the observer that provides the estimate of the variable can be defined as
here denotes the observer gain. When an estimate of is computed through the DO, it is then fed forward to the controller and Equation (22) can then be modified as
where
3.4. Stability Criterion for Disturbance Observer
To evaluate the stability of the designed observer, the error dynamics must first be analyzed. The error in the estimation of the variable is calculated as
Differentiating (33) and substituting (28) and (30) into (33) results in
Substituting (5) into (33) can further simplify to provide
where
The submatrices of are provided below:
From (35), it can be inferred that to satisfy the stability criteria, observer gain N must be assigned values to ensure that the matrix is Hurwitz. Therefore, must be chosen so that the six eigenvalues of have real parts that are negative.
In order to simplify the observer design, the eigen values can be split into two triplets of , with and . The value of can be chosen to be 10-times faster than the closed-loop controller pole. The parameters and , which are the damping ratio and the natural frequency of the observer dynamics, can be adjusted appropriately to obtain a faster convergence rate for the disturbance estimation. Typically, they must be tuned to have a faster response than the principal control loop. But it must also be taken into consideration that the parameter must not be set to a very high value to avoid large measurement noises.
Using the selected eigenvalues, the observer gains can be computed with
3.5. Disturbance Observer-Based Control for Real-Time Implementation
From a practical perspective, a potential issue of the above disturbance observer is its tendency to become inaccurate when control saturation occurs. Specifically, when the control saturates, the actual output from the actuator does not match the intended control input . This discrepancy causes the disturbance observer to provide incorrect estimates. If the saturated actuator input is denoted by , is the actual control input, and the actual controller input can then be represented as shown below:
where denotes the excess control effort that is exerted. This problem can be effectively addressed by introducing an additional term in the disturbance observer, leading to
The term aids in improving the accuracy of the disturbance estimation and also permits avoidance of the windup phenomenon during control saturation.
In theoretical terms, it is evident that the composite controller possesses the capability to suppress sinusoidal disturbances and achieve accurate tracking of sinusoidal references. However, the presence of the term in the controller Equation (31) and in the DO Equation (42) raises concerns about the real-time implementation of the composite controller due to the issue of noise measurement sensitivity.
By assigning a vector , the controller in (31) can be rewritten as
Recalling that and substituting (43) into (42) results in
Since the voltage reference is a sinusoidal waveform oscillating at the angular frequency , the second time derivative of can be expressed as
Substituting (45) into (13), can be obtained as
Furthermore, let be a new matrix such that
Substitution of (46) and (47) into (44) and representing the tracking error as , the DO in (44) can be further simplified as
To eliminate the time derivatives of and the disturbance observer (48) can be modified by introducing another state variable , such that
Incorporating , the DO in (48) can be implemented as
and
Moreover, the substitution of (51) into (50) yields
where
Remark 1.
The term is essentially analogous to an anti-windup compensator that deals with the effect of the actuator saturation.
Remark 2.
The DO in (52)–(53) is derived from the substitution of the expression of into the original observer provided in (30). This essentially implies that the information regarding the terms is implicitly included in (52). Hence, the terms and can be disregarded in the controller in (31) and can be simplified as
Furthermore, the substitution of (51) into (54) eliminates the necessity for in real-time implementation, resulting in
where
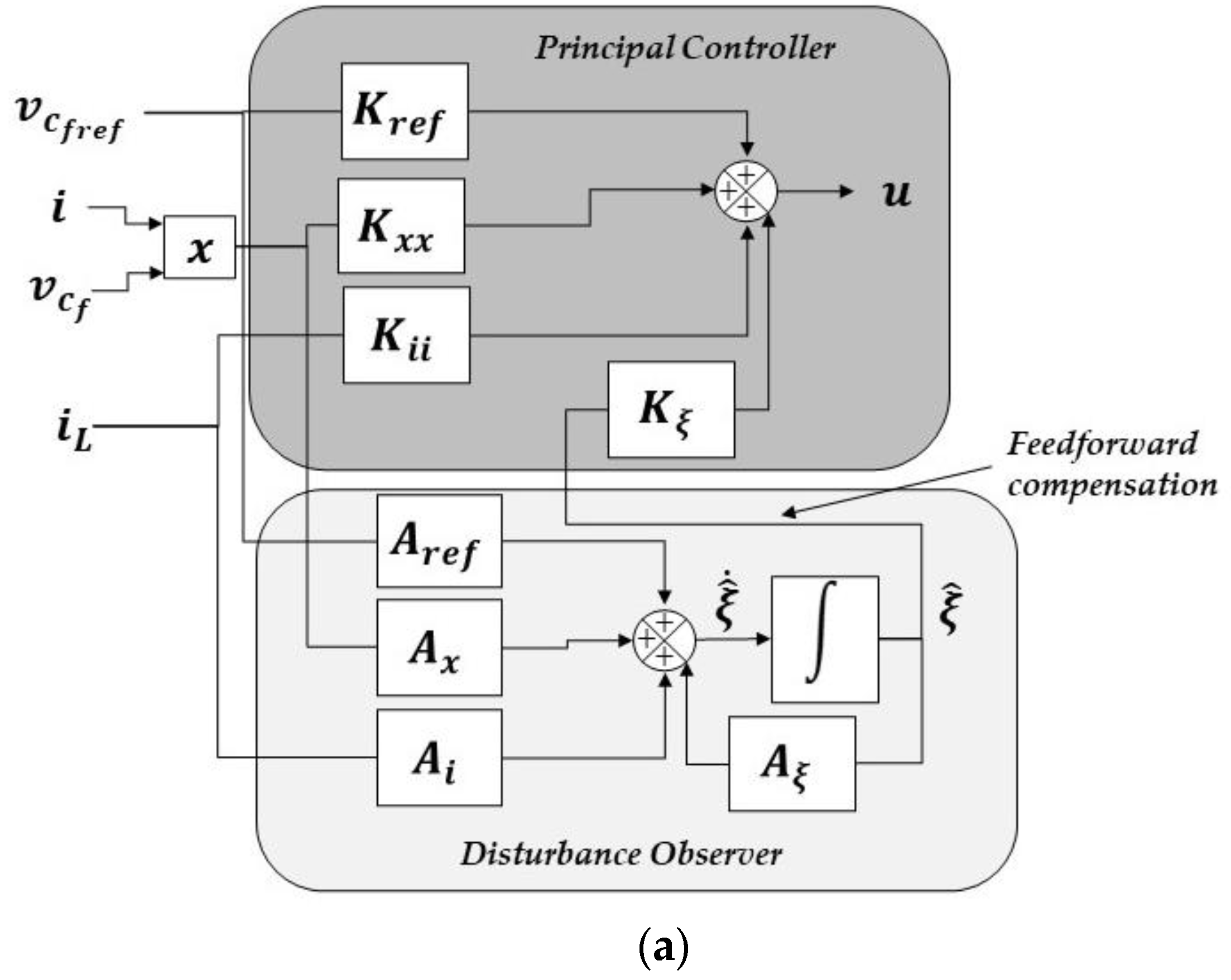
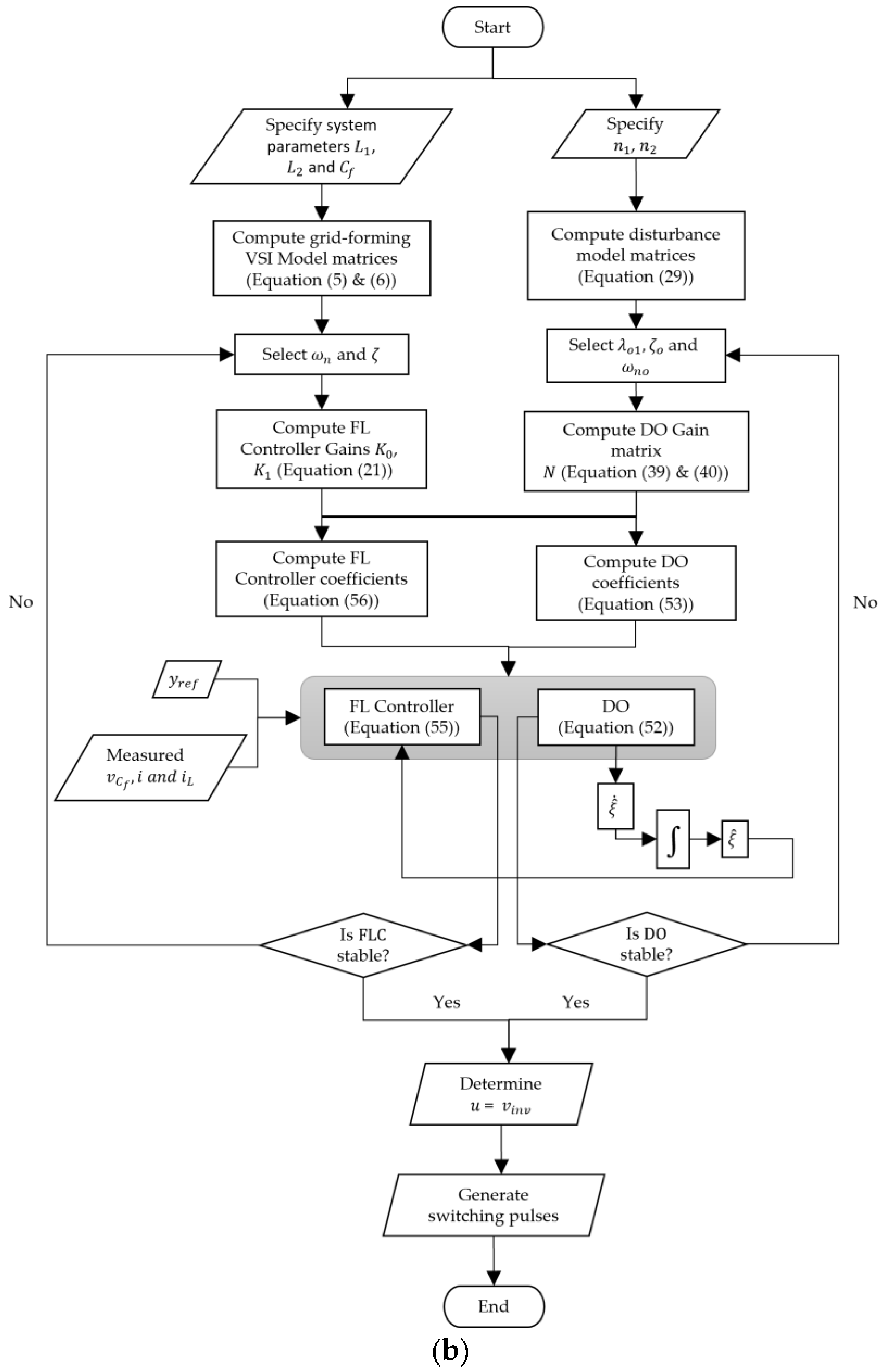
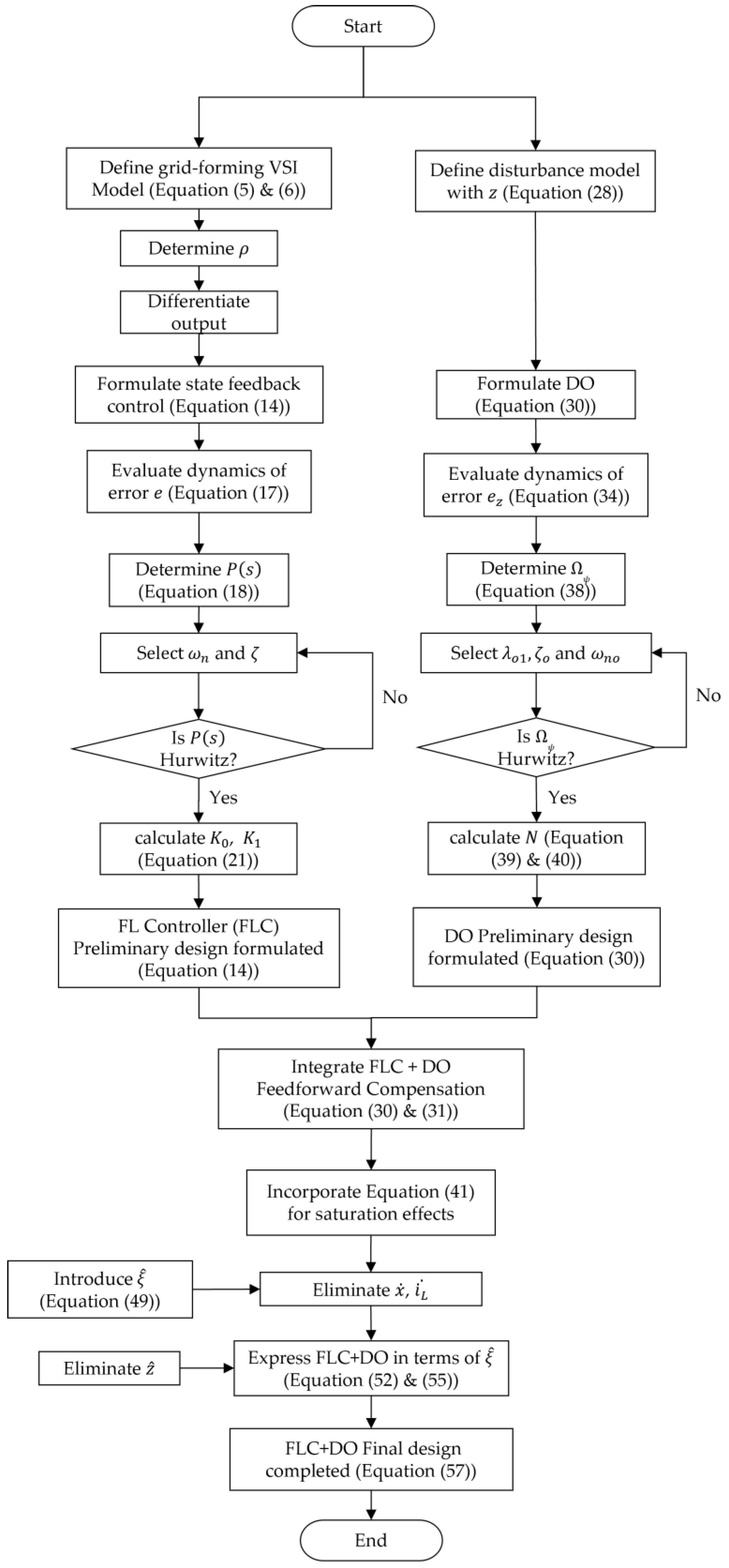
The resultant composite controller is characterized by a dynamic state-feedback control, as denoted by Equation (55), which integrates a disturbance observer (DO) outlined in Equation (52). The DO is specifically designed to address both non-oscillatory and oscillatory disturbances. DO estimates variable that contains information about and sends it to the principal controller via a feedforward compensation as shown in Figure 4a. The main stages in the design of the composite feedback linearization–disturbance observer-based (FL-DO) controller described above are illustrated in Figure 5 while Figure 4b resents the key variables and coefficients that are calculated in the controller. Given the direct application of the controller’s action to each phase without the need for any transformations, a separate composite controller is allocated to each phase of the three-phase system. The per-phase formulation of the composite controller can be expressed as
where .
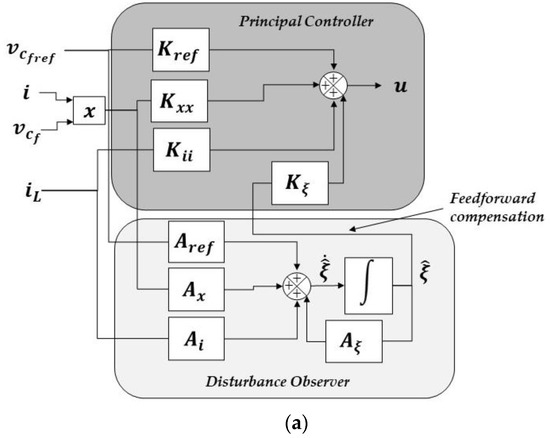
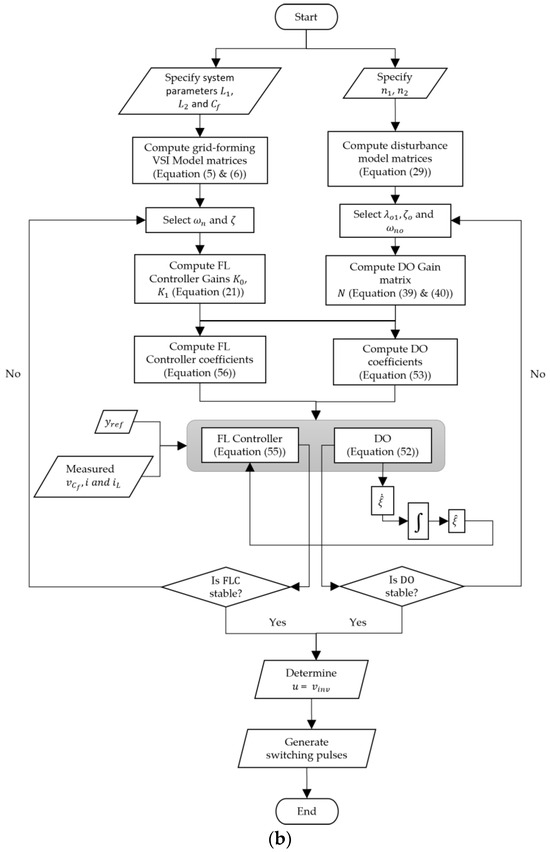
Figure 4.
(a) Control block diagram of the proposed controller and (b) flowchart showing the variables and coefficients computed in the proposed controller.
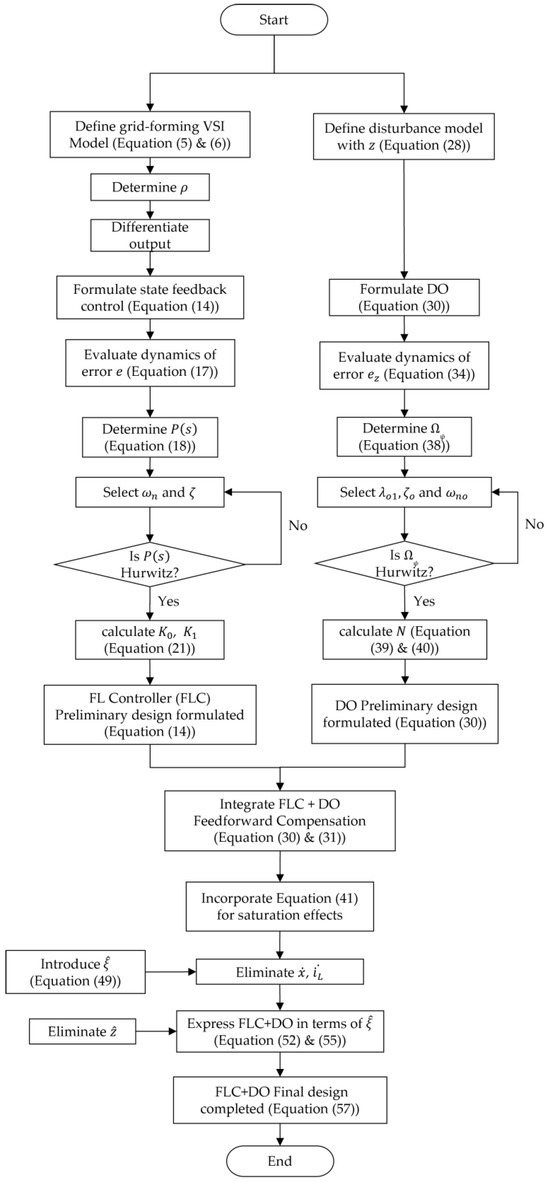
Figure 5.
Flowchart summarizing the key stages of the proposed controller design.
4. PWM Scheme
The Pulse Width Modulation (PWM) scheme implemented for the proposed controller follows a conventional carrier-based PWM methodology. This approach involves comparing a triangular carrier waveform with a modulating signal generated by the controller to directly manipulate the switches responsible for modulating the output phase voltages in a VSI.
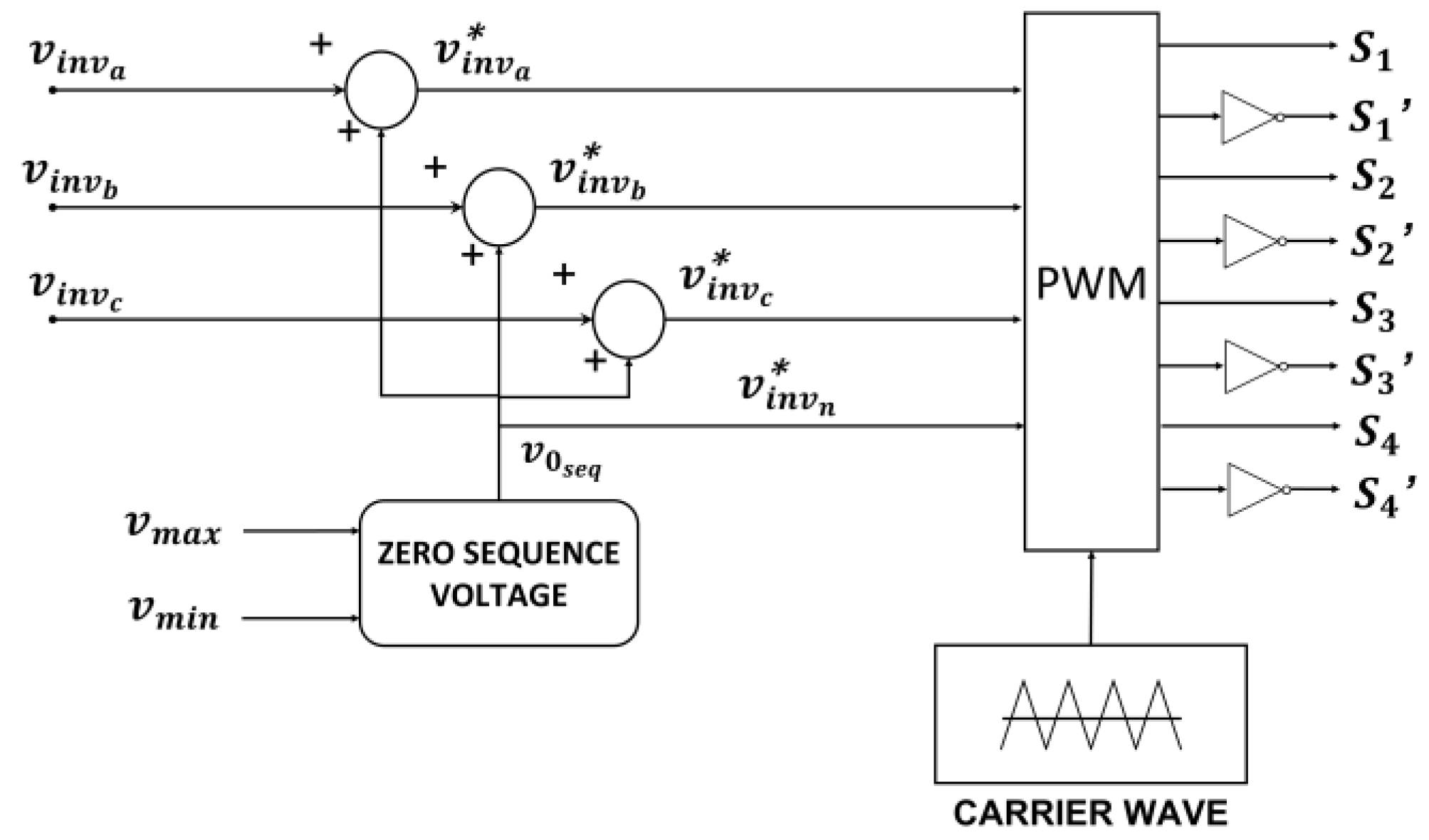
The additional leg incorporated into the VSI within the three-phase four-wire systems serves as a neutral connection. When applying the traditional Pulse Width Modulation (PWM) scheme to a 4-leg VSI, adjustments are necessary due to the voltages being referenced to the 4th leg of the VSI. A PWM strategy based on the offset voltage concept, as illustrated in Figure 6, is commonly employed for 4-leg VSIs [53,54]. The idea behind this method is to inject the offset voltage to the 4th leg and produce a switching sequence that resembles the one produced with the Class 1, 3-dimensional space vector PWM (3-DSVPWM) method [55], a subset of SVPWM methods that provides the lowest possible total harmonic distortion (THD) in the output voltage. The offset voltage utilized corresponds to the zero-sequence voltage can be determined using the following expression [56]:
here denotes the input DC voltage, while and are the minimum and maximum values of the three reference voltages for every sampling instant. The parameter μ denotes the distribution ratio that relates to the gating time of the zero-voltage vectors for the switches of the VSI and can be assigned any value between 0 and 1; here, a value of 0.5 is fixed for this parameter.
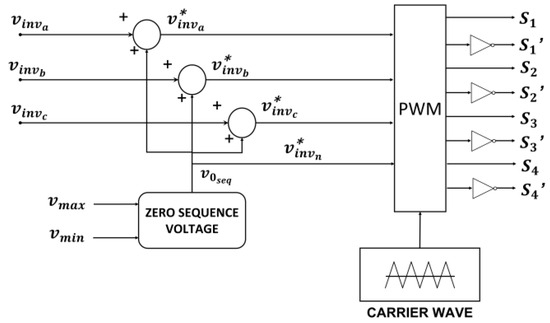
Figure 6.
Schematic of the scalar PWM scheme.
The reference voltages for each VSI leg are non-sinusoidal modulating signals that are expressed as
5. Performance Testing and Assessment
The efficacy of the proposed controller in addressing unbalanced and distorted loads has been assessed first through simulation studies conducted in the MATLAB/Simulink (R2020a) environment. Later, the simulations results were verified by conducting experimental studies. Three distinct load configurations, encompassing both linear and nonlinear types, have been utilized to test the controller’s performance. Additionally, the controller’s response under transient conditions induced by load fluctuations has been examined. To evaluate the performance of the controller, a comparison with a standard controller presented in Section 5.3 has been carried out.
5.1. Simulation
The 4-leg VSI system and the controller were simulated and tested in the MATLAB/Simulink environment. Table 1 displays the system parameters utilized for simulating the grid-forming VSI, while Table 2 lists the parameters of the simulated unbalanced and nonlinear loads.

Table 1.
System parameters.
Table 2.
Load parameters.
5.2. Experimental Testing
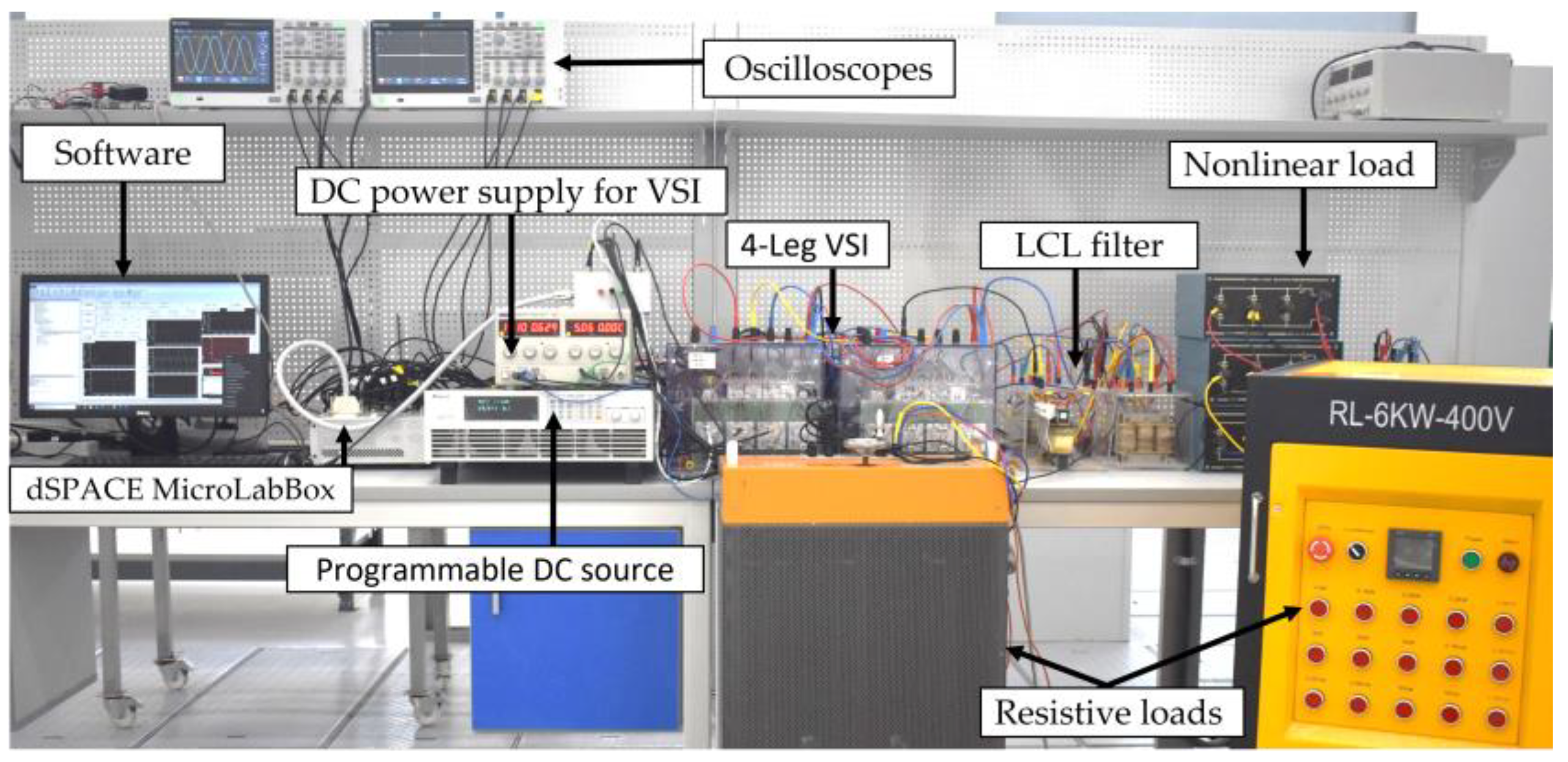
The investigation into the practical performance of the proposed controller was conducted using a laboratory-scale hardware setup depicted in Figure 7. A DC power supply from Chroma (Taoyuan City, Taiwan) was utilized as the power source, while an inverter module manufactured by Semikron (Nürnberg, Germany) was employed to realize the 4-leg inverter topology. Parameters for the DC link capacitor, filter capacitors, inductors, and switching frequency matched those utilized in the simulation. The three-phase loads applied for the experiments are identical to those applied in the simulations. The measurement of the instantaneous current and voltage values was taken using the OPAL-RT conditioning module (Montreal, QC, Canada). Real-time implementation of the composite controller was achieved using the real-time simulator dSPACE MicroLabBox DS1202 (Paderborn, Germany). The sampling period of the controller is 0.1 ms.
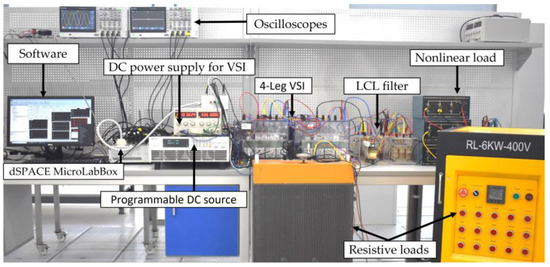
Figure 7.
Laboratory-scale experimental setup for testing the proposed controller.
5.3. Performance Comparison
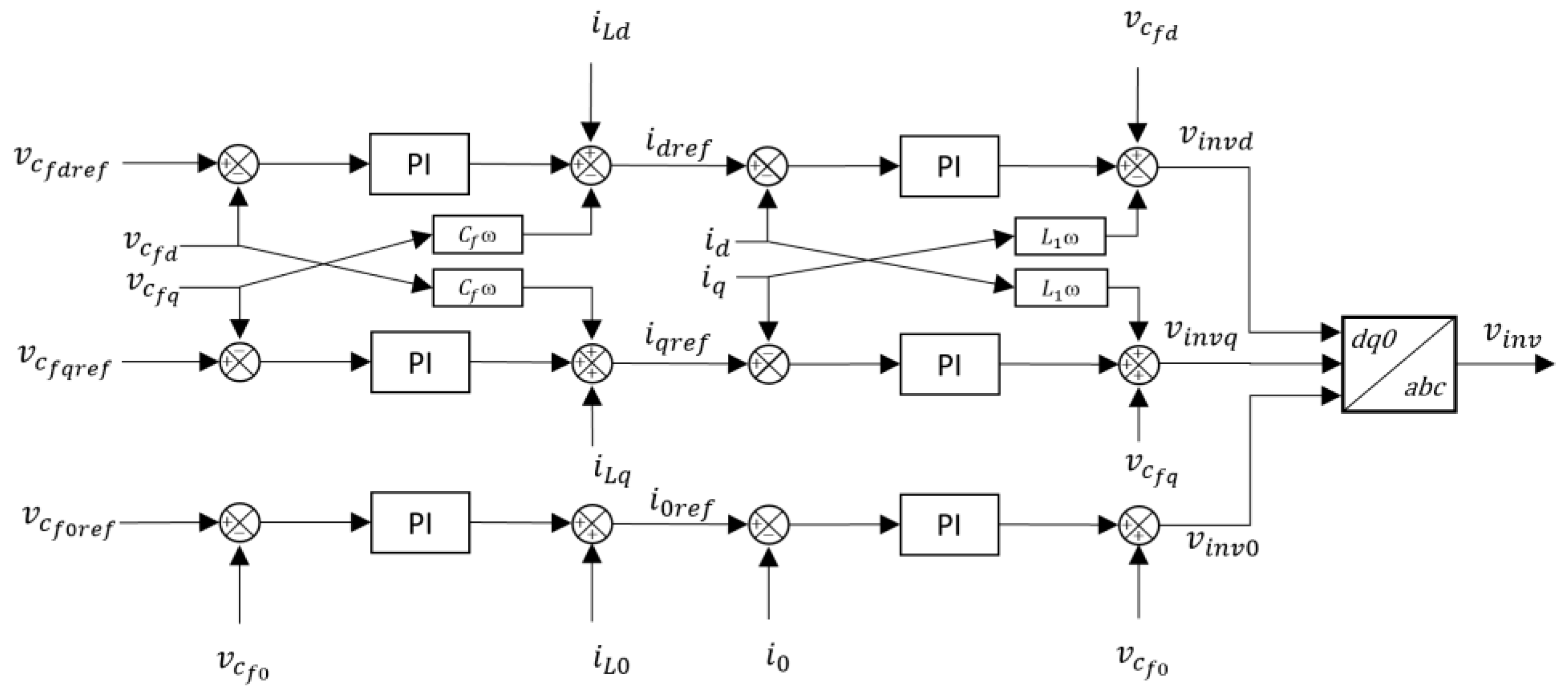
To assess the effectiveness of the proposed controller, a comparison of the proposed controller has been made with a conventional PI control-based cascaded control scheme designed in the dq0 frame [57]. The control scheme used is illustrated in Figure 8. The cascaded scheme employs an inner current control loop within the voltage control loop. The outer loop provided the reference for the inner loop, while the inner loop generates the desired reference signal. All the signals are transformed to the synchronous frame. The 0 axis was included to decouple the zero-sequence component that arises due to unbalanced loads.
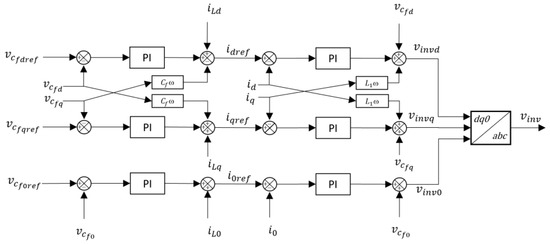
Figure 8.
Cascaded PI control scheme used for comparison.
5.4. Performance Metrics
Two key performance metrics have been utilized for the comparative analysis, which are total harmonic distortion (THD) and Voltage Unbalance Factor (VUF) [3].
The THD can be defined in terms of the root mean square (RMS) values of the harmonics of a signal:
where is the rms value of the fundamental frequency component of voltage, stands for the rms values of the nth harmonic frequency components, and N is the maximum order of harmonic considered.
The Voltage Unbalance Factor is determined using the expression
where
And and are the rms line-to-line voltages
6. Results and Discussion
6.1. Simulation Results
The efficacy of the proposed controller in addressing unbalanced and distorted loads has been assessed through simulation studies conducted in the MATLAB/Simulink environment. The controller parameters used are listed in Table 3 and the results obtained for each of the load conditions are provided in the following sections.
Table 3.
Controller parameters for simulations.
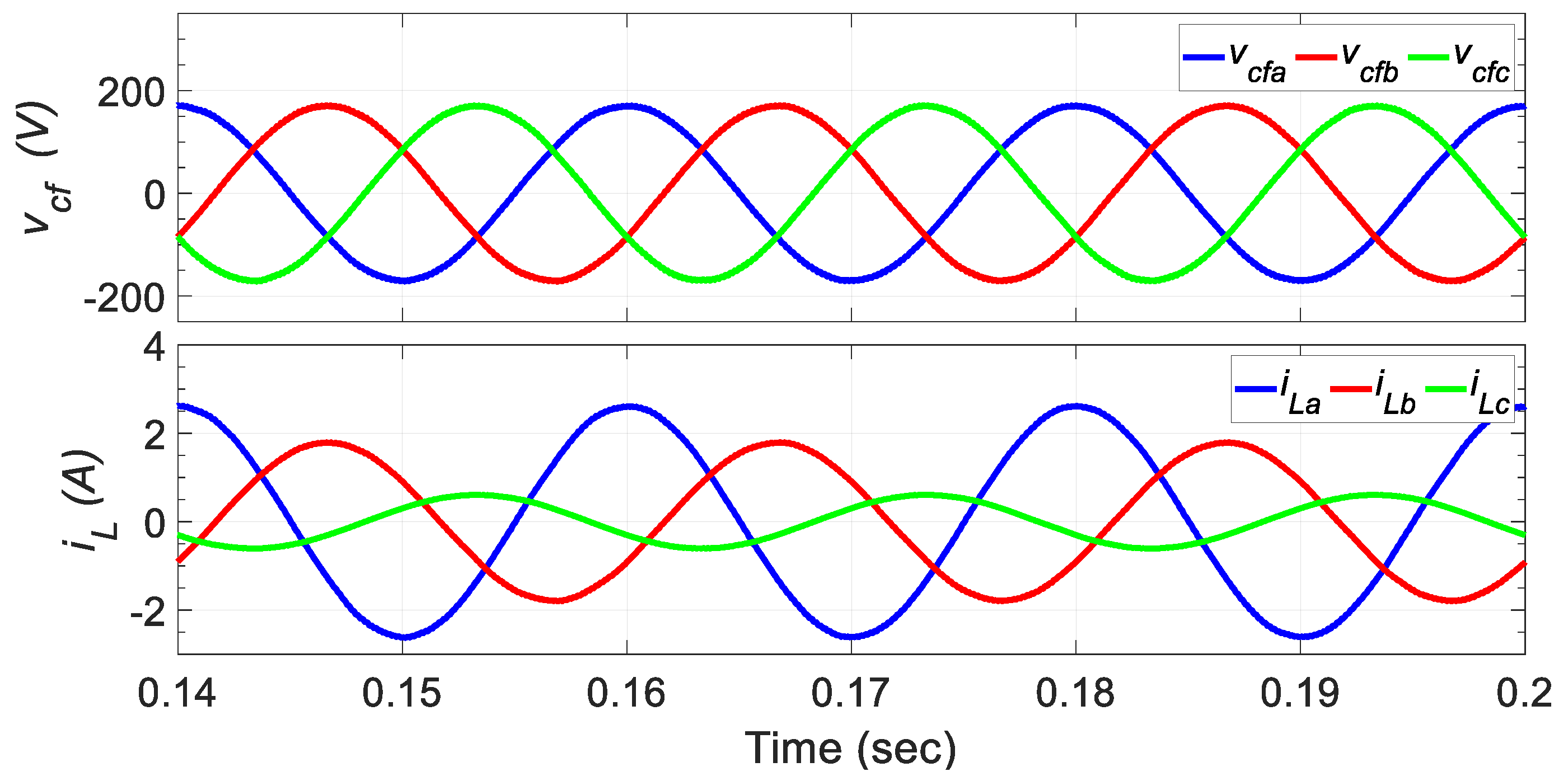
6.1.1. Unbalanced Linear Loads
Given the common occurrence of unbalanced loads in power networks, it is imperative that controllers possess the capability to manage such loads effectively. This ensures the maintenance of stable operation even when asymmetrical loads are present. In this section, the effectiveness of the proposed controller in supplying power to an unbalanced linear load while ensuring balanced three-phase voltage at the output of the four-leg VSI is evaluated. A simulation is conducted using an unbalanced three-phase resistive load , with parameters outlined in Table 2, connected to the VSI. The controller’s parameters and are selected as 0.707 and 1000 rad/s, respectively, using which the controller gains and can be determined using (21). Similarly, the observer gain matrix can be computed using the parameters and as shown in (39) and (40) which are assigned 0.95 and 2000 rad/s, respectively. To attenuate the 2nd harmonic oscillation that is treated as a disturbance as a result of the unbalance in the linear load, the parameters and are set to 2. The waveforms of the filter capacitor voltages and load currents of the four-leg VSI under the given unbalanced load condition is presented in Figure 9. The results illustrate that the proposed controller effectively tracks the sinusoidal reference voltages and provides a well-balanced voltage at the output with improved VUF and THD as compared to the dq0-PI controller. The VUF achieved meets the prescribed IEEE standards of 2%, as indicated in Table 4.
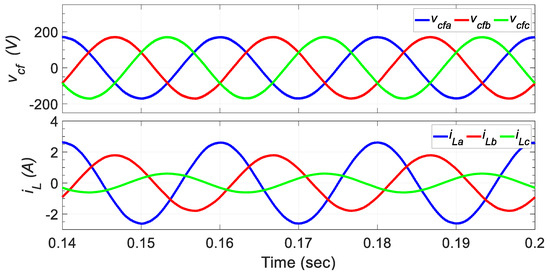
Figure 9.
Filter capacitor voltages and load currents for the unbalanced linear load .
Table 4.
Simulation performance of the proposed controller.
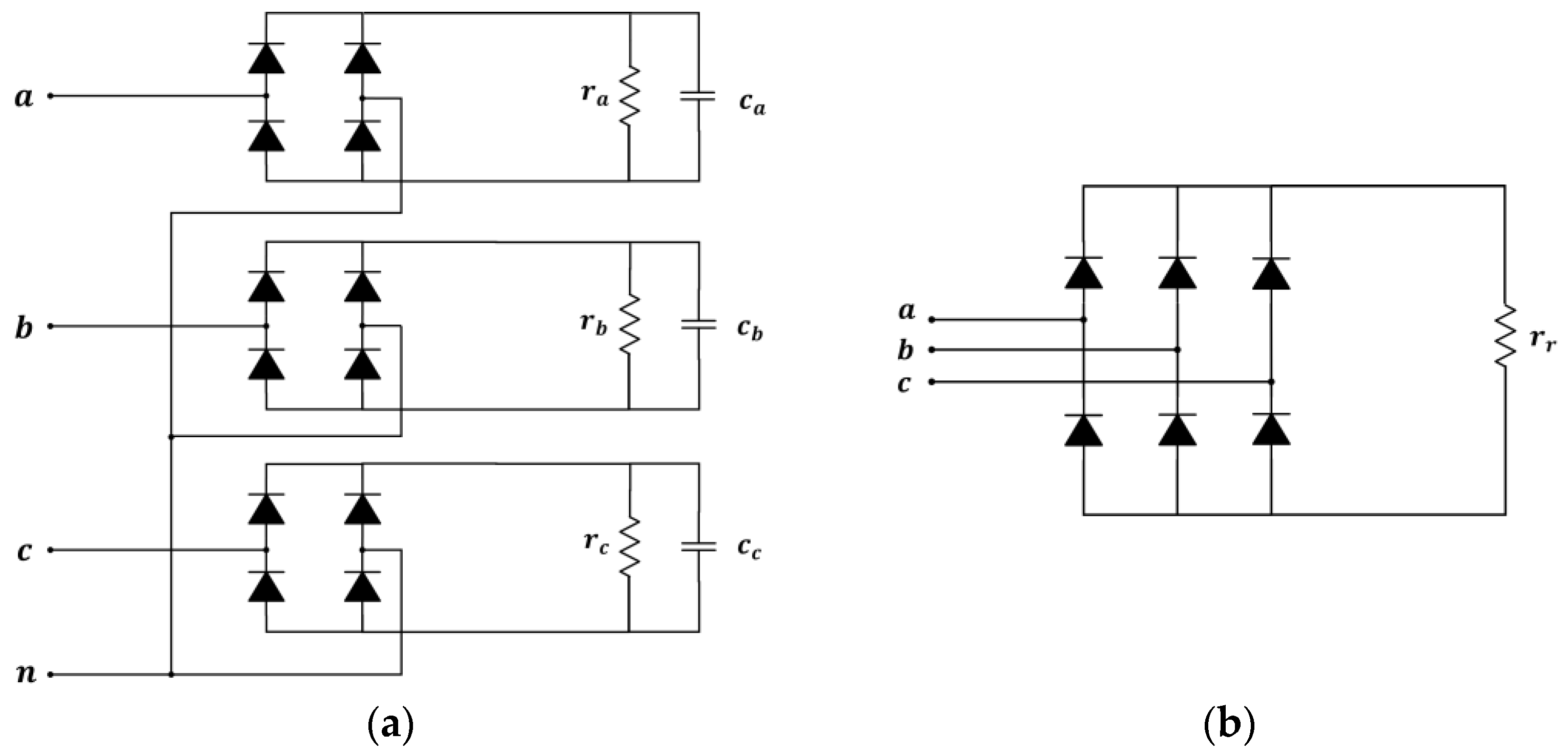
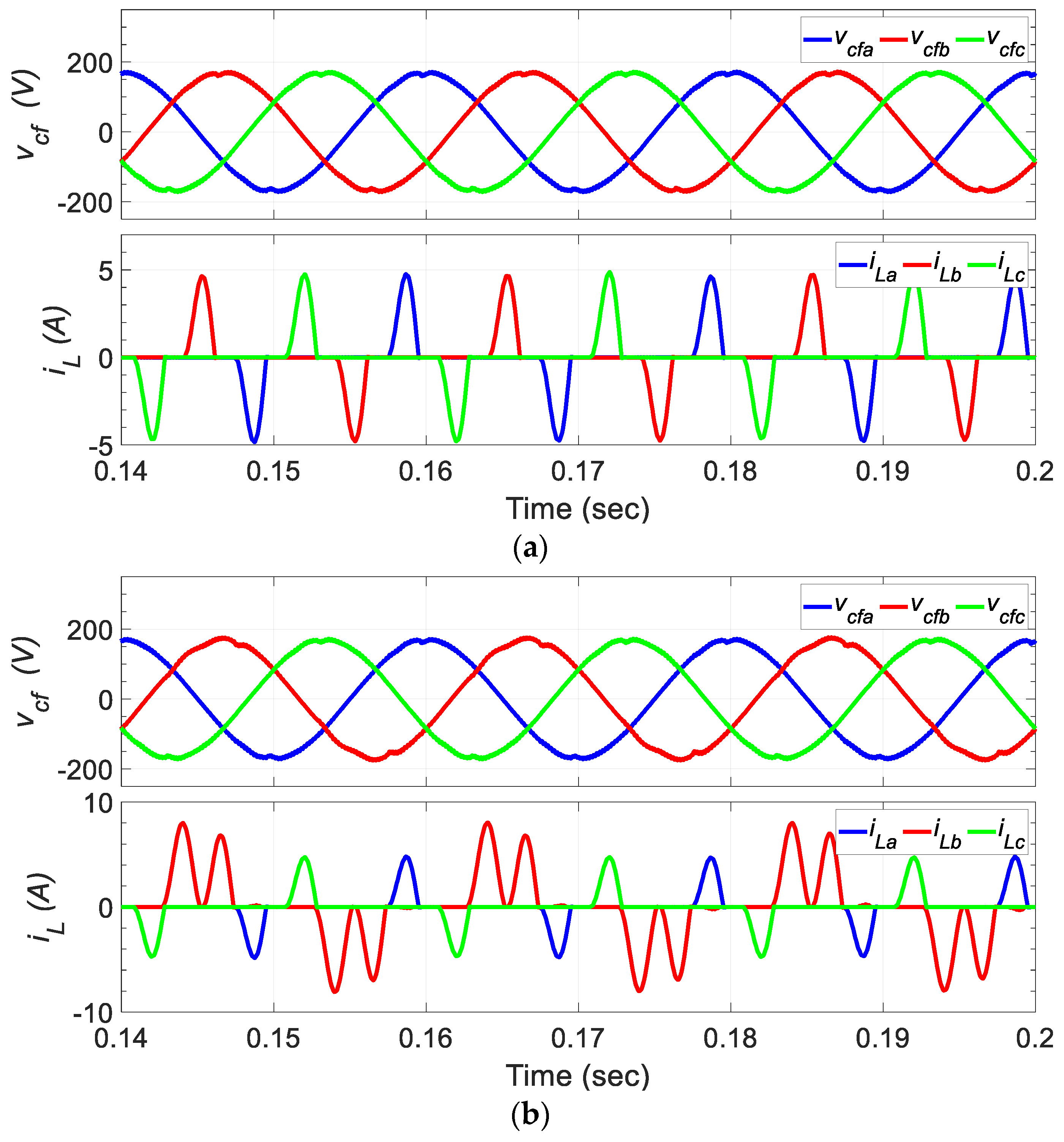
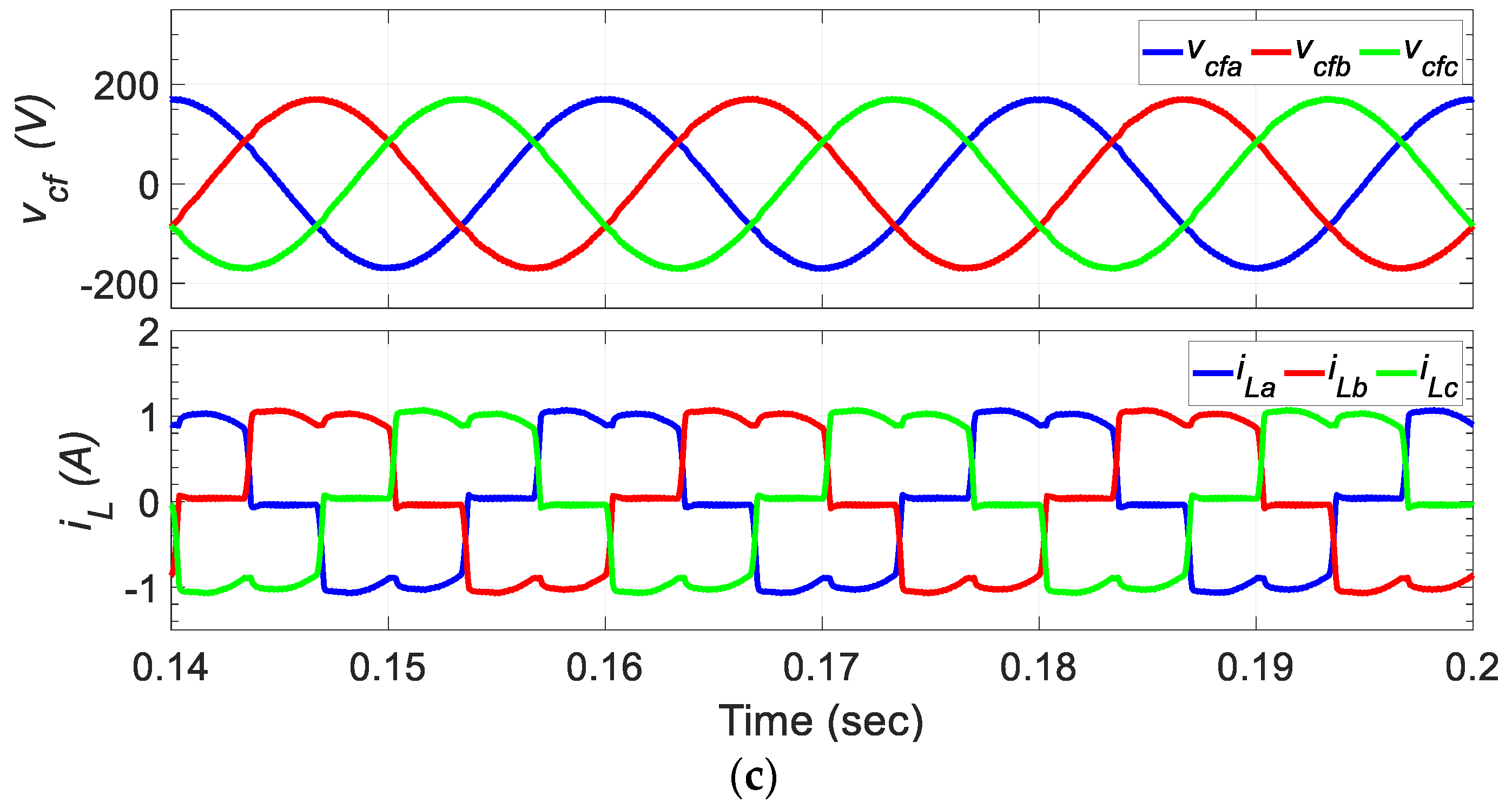
6.1.2. Nonlinear Loads
The objective of this section was to assess the performance of the controller when four-leg VSIs are supplying nonlinear loads. Nonlinear loads introduce non-sinusoidal and distorted current waveforms, consequently leading to the generation of non-sinusoidal neutral currents within the VSI circuit. This presents significant challenges for controllers primarily designed to generate sinusoidal voltage waveforms. Additionally, nonlinear loads contribute to the appearance of harmonic components across various orders in the VSI output signals. Hence, it is essential to design controllers that can maintain the harmonic content within acceptable limits. Two distinct nonlinear load topologies were examined, as depicted in Figure 10, with their respective parameters provided in Table 2. For the balanced single-phase rectifier topology presented in Figure 10a, simulations were conducted under both balanced and unbalanced conditions. The controller parameters and are selected as 0.707 and 1000 rad/s, respectively, while and are assigned as 0.95 and 5000 rad/s, respectively. To account for the significant presence of odd harmonics, particularly the 5th harmonic, in the nonlinear loads being analyzed, the parameters and are set to 5. Results plotted in Figure 11 demonstrate that the proposed controller effectively generates sinusoidal output voltage waveforms, with THD levels for each of the three phases maintained within acceptable limits of 5% under both balanced and unbalanced nonlinear load conditions. Comparatively, the proposed controller performs better than the dq0-PI controller in terms of output voltage quality, as tabulated in Table 4.
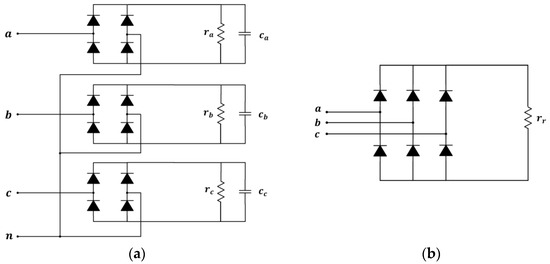
Figure 10.
The topology of the nonlinear loads; (a) single-phase rectifier and and (b) three-phase rectifier .
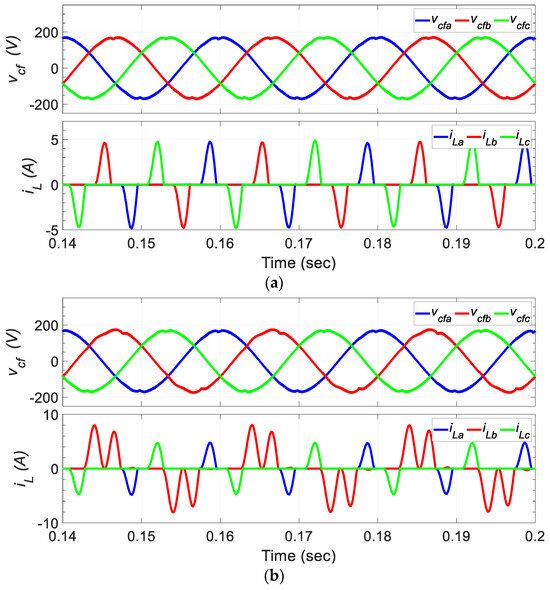
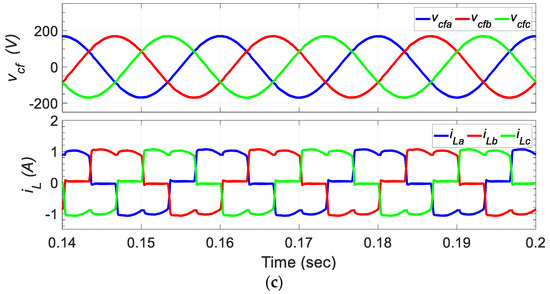
Figure 11.
Filter capacitor voltages and load currents for the (a) balanced nonlinear load , (b) unbalanced nonlinear load , and (c) three-phase rectifier load .
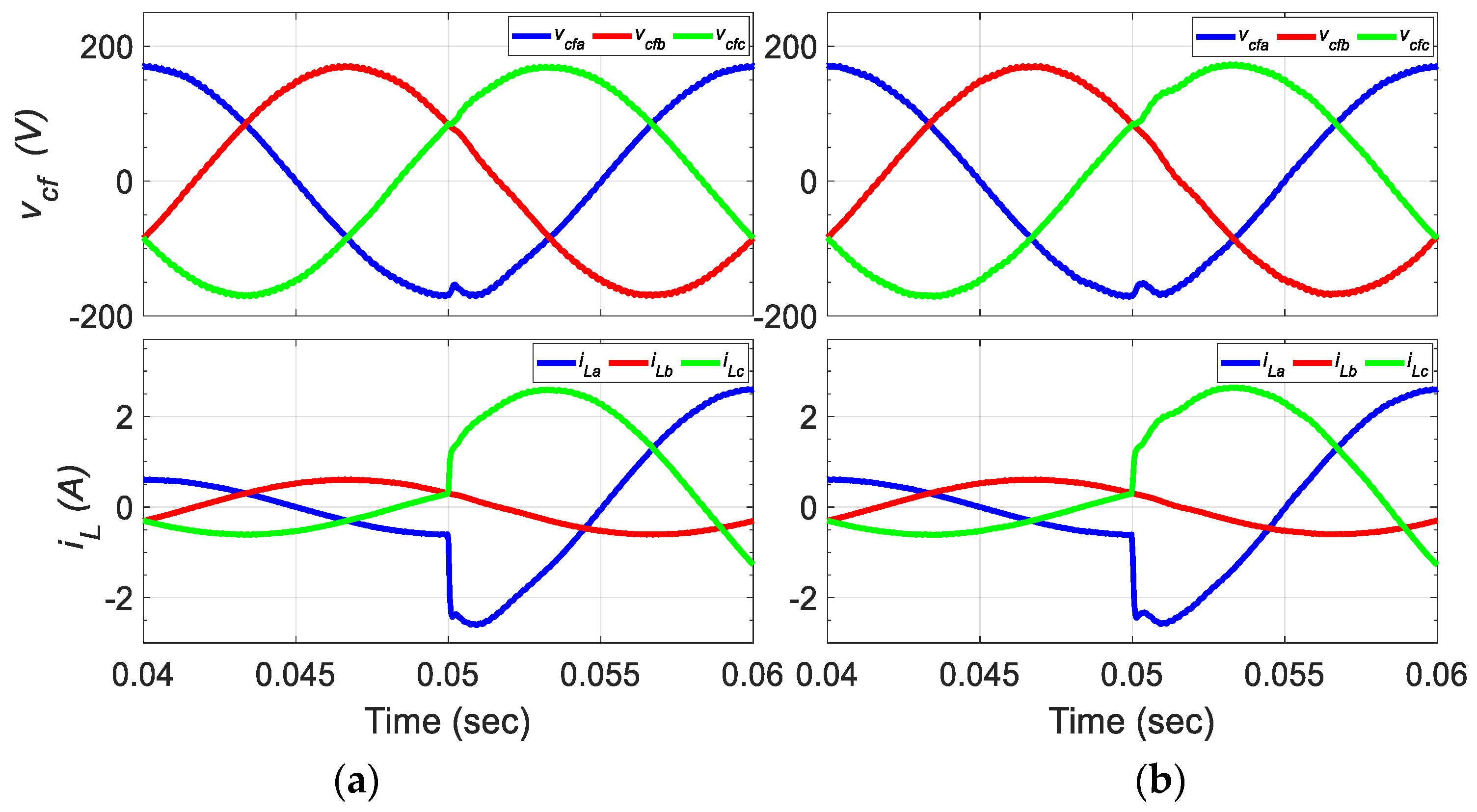
6.1.3. Transient Performance
Load transients in renewable-based DG systems can impact voltage regulation, power quality, and system stability. Therefore, proper control of REDG systems is essential to mitigate the effects of load transients and ensure the reliable operation of the distribution network. The objective of this section is to evaluate the VSI controller’s performance in response to load transients. A load transient scenario is simulated by inducing a step change in the load. Initially, the four-leg VSI supplies power to a three-phase balanced resistive load with a value of 280 Ω/ph. At the time instant t = 0.05 s, is switched on in parallel to the balanced load. The resulting voltage and current waveforms for the proposed controller and the dq0-PI controller during the transient instant are plotted in Figure 12. When compared to the dq0-PI controller, the proposed controller produces a better response to the load transient and is able to maintain a balanced output voltage within the allowable standards after the instant of the load transient.
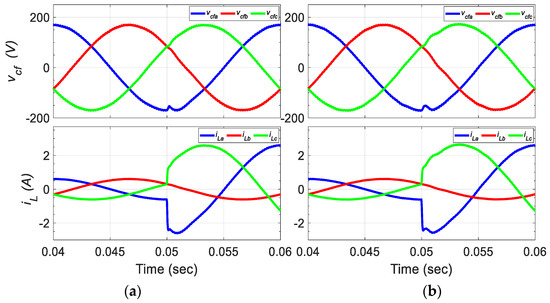
Figure 12.
Filter capacitor voltages and load currents for the (a) proposed controller and (b) dq0-PI controller.
6.2. Experimental Results
This section presents the results from the experimental investigations carried out using the setup shown in Figure 7. The parameters for the controller used in the hardware implementation, both for the proposed controller and the dq0-PI controller, are detailed in Table 5. The results for the given test scenarios, including the relevant waveforms, are presented in the subsequent sections.
Table 5.
Controller parameters for experimental evaluation.
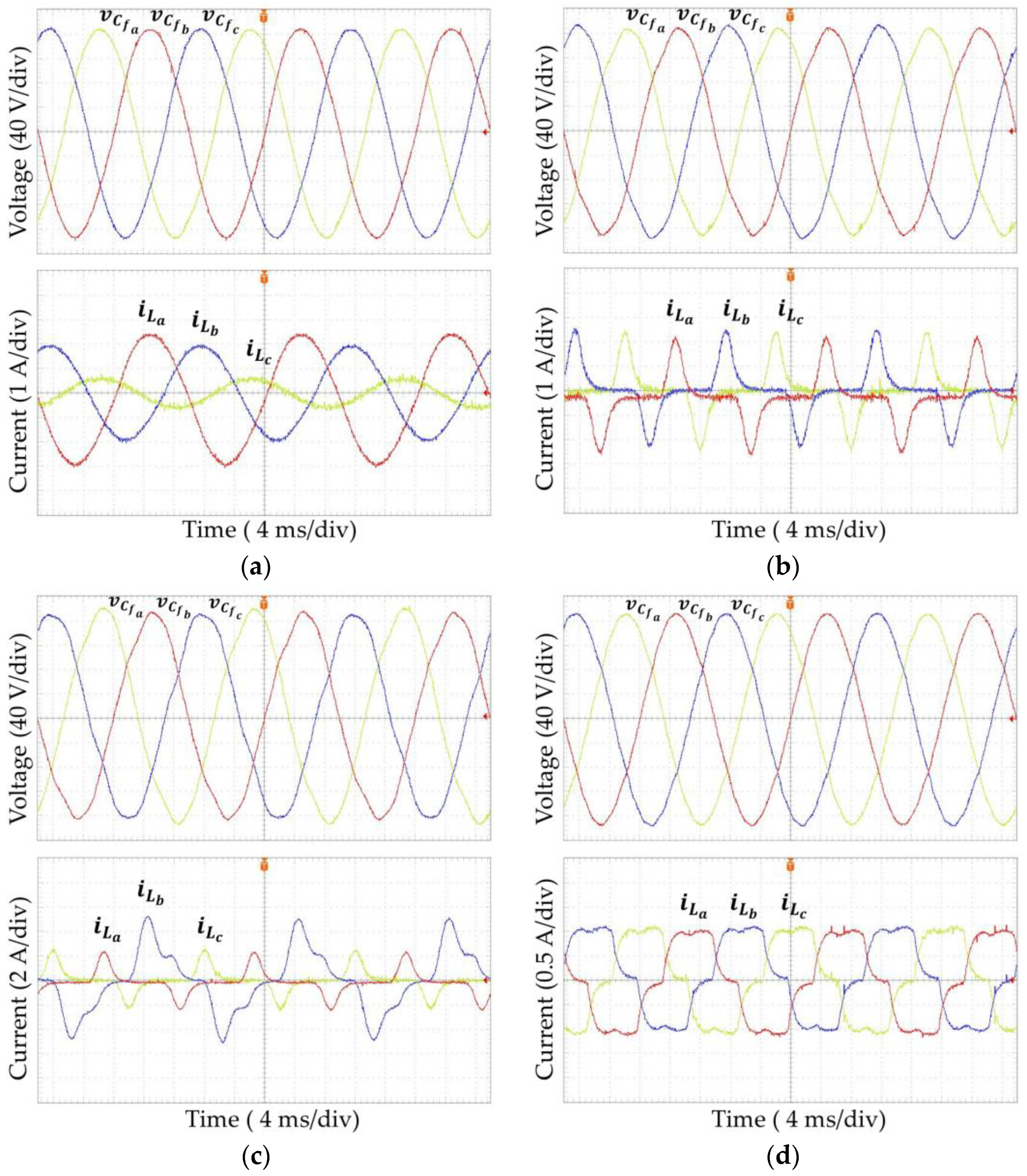
6.2.1. Unbalanced Linear Loads
Figure 13a displays the oscilloscope waveforms of the filter capacitor voltages and load currents of the four-leg VSI under the given unbalanced load . The controller parameters and the performance metrics are listed in Table 5 and Table 6, respectively. The experimental results of the proposed controller are better than the dq0-PI controller and are within the IEEE standards, thereby in agreement with the simulation comparisons.
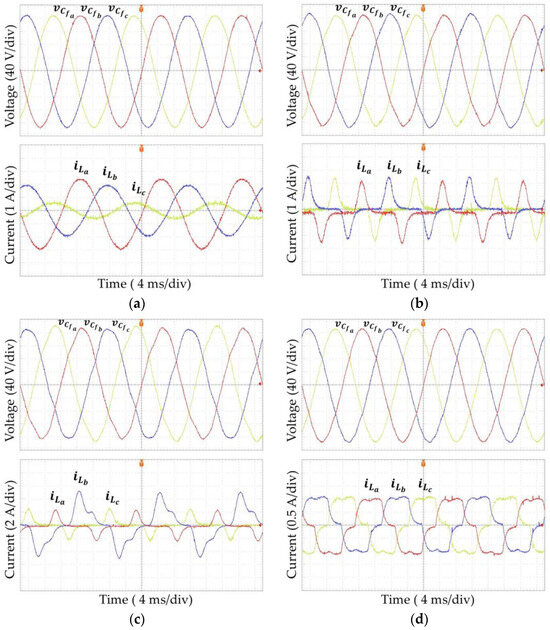
Figure 13.
Oscilloscope waveforms of filter capacitor voltages and load currents for the (a) unbalanced linear load , (b) balanced nonlinear load , (c) unbalanced nonlinear load , and (d) three-phase rectifier load .
Table 6.
Experimental performance of the proposed controller.
6.2.2. Nonlinear Loads
The waveforms of the experimental test for the given nonlinear loads are presented in Figure 13b–d. The controller parameters and the performance parameters are listed in Table 5 and Table 6, respectively. In consistency with the simulation results, the experimental results demonstrate the capability of the proposed controller to achieve balanced and sinusoidal output voltages at the VSI output which are within the standards and perform better in comparison to the dq0-PI controller.
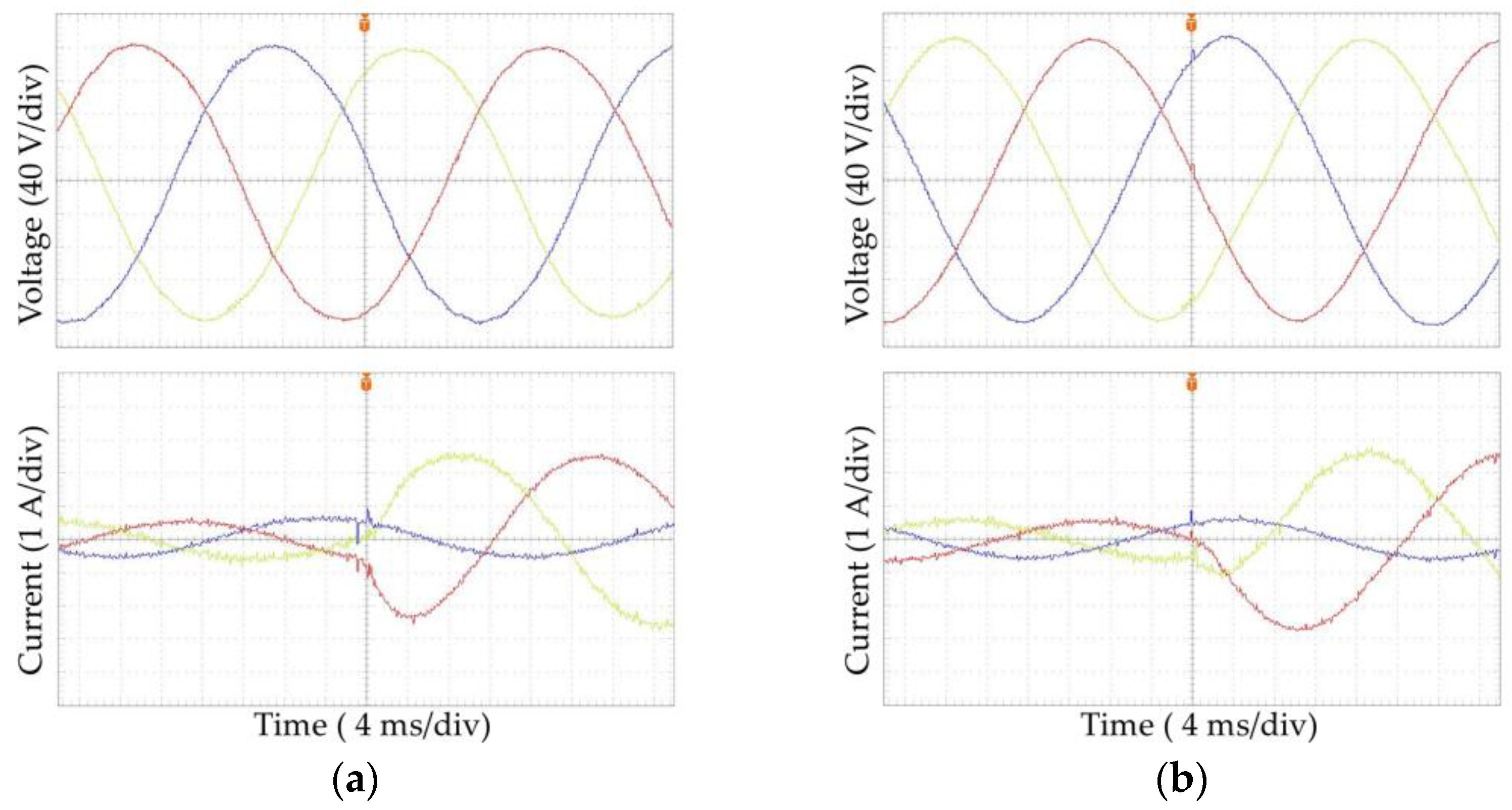
6.2.3. Transient Performance
The transient scenario previously simulated has been replicated in the provided hardware setup. The resulting voltage and current waveforms for both the proposed controller and the dq0-PI controller during the transient instant are displayed in Figure 14. When compared to the dq0-PI controller, the proposed controller produces a better response to the load transient with reduced spikes.
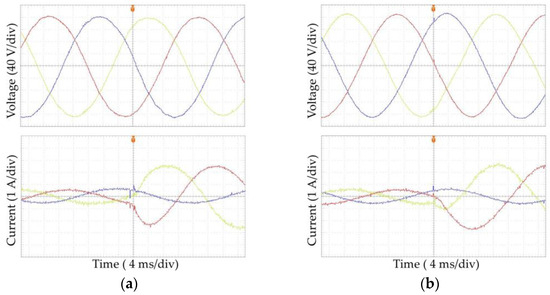
Figure 14.
Oscilloscope waveforms of filter capacitor voltages and load currents for the (a) proposed controller and (b) dq0-PI controller (phase a-red, phase b-blue, phase c-yellow).
7. Conclusions
The controller proposed for voltage regulation in the four-leg VSI features a composite structure comprising a principal FL controller that is responsible for precise reference voltage tracking and a disturbance observer (DO) aimed at mitigating the effects of both non-oscillatory and oscillatory disturbances. The results obtained from the simulation and hardware implementation indicate that the proposed controller design achieves a sinusoidal and balanced voltage waveform, with total harmonic distortion (THD) below 5% and Voltage Unbalance Factor (VUF) within 2%, across all tested load scenarios. These results align with the IEEE recommended standards for the respective load types. When compared to the traditional cascaded control scheme using PI controllers in the dq0 frame, the proposed controller demonstrated better performance metrics for the tested scenarios. Moreover, the controller exhibits satisfactory transient response characteristics, demonstrating minimal overshoot and quick recovery time under abrupt load transients.
Author Contributions
Conceptualization, S.S.S. and H.S.; methodology, S.S.S. and R.E.; software, S.S.S. and R.E.; validation, S.S.S. and T.B.H.; resources, H.S.; writing—original draft preparation, S.S.S.; writing—review and editing, H.S.; supervision, H.S.; funding acquisition, M.E. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the United Arab Emirates University under fund code 31R224-RTTSC (1) 2019.
Data Availability Statement
No new data were created or analyzed in this study.
Acknowledgments
The authors express their sincere gratitude for the support provided by the Department of Electrical and Communication Engineering, United Arab Emirates University, Al-Ain, United Arab Emirates.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Liu, Q.; Tao, Y.; Liu, X.; Deng, Y.; He, X. Voltage Unbalance and Harmonics Compensation for Islanded Microgrid Inverters. IET Power Electron. 2014, 7, 1055–1063. [Google Scholar] [CrossRef]
- Rafi, F.H.M.; Hossain, M.J.; Rahman, M.S.; Taghizadeh, S. An Overview of Unbalance Compensation Techniques Using Power Electronic Converters for Active Distribution Systems with Renewable Generation. Renew. Sustain. Energy Rev. 2020, 125, 109812. [Google Scholar] [CrossRef]
- IEEE Std 519-2022; IEEE Standard for Harmonic Control in Electric Power Systems. Revision of IEEE Std 519-2014; IEEE: Piscataway, NJ, USA, 2022; pp. 1–31.
- IEEE Std 1159-2019; IEEE Recommended Practice for Monitoring Electric Power Quality. Revision of IEEE Std 1159-2009; IEEE: Piscataway, NJ, USA, 2019; pp. 1–98.
- Rojas, F.; Cárdenas, R.; Burgos-Mellado, C.; Espina, E.; Pereda, J.; Pineda, C.; Arancibia, D.; Díaz, M. An Overview of Four-Leg Converters: Topologies, Modulations, Control and Applications. IEEE Access 2022, 10, 61277–61325. [Google Scholar] [CrossRef]
- Vechiu, I.; Camblong, H.; Tapia, G.; Dakyo, B.; Curea, O. Control of Four Leg Inverter for Hybrid Power System Applications with Unbalanced Load. Energy Convers. Manag. 2007, 48, 2119–2128. [Google Scholar] [CrossRef]
- Sinsukthavorn, W.; Ortjohann, E.; Mohd, A.; Hamsic, N.; Morton, D. Control Strategy for Three-/Four-Wire-Inverter-Based Distributed Generation. IEEE Trans. Ind. Electron. 2012, 59, 3890–3899. [Google Scholar] [CrossRef]
- Vechiu, I.; Curea, O.; Camblong, H. Transient Operation of a Four-Leg Inverter for Autonomous Applications with Unbalanced Load. IEEE Trans. Power Electron. 2010, 25, 399–407. [Google Scholar] [CrossRef]
- Hadidian Moghaddam, M.J.; Kalam, A.; Miveh, M.R.; Naderipour, A.; Gandoman, F.H.; Ghadimi, A.A.; Abdul-Malek, Z. Improved Voltage Unbalance and Harmonics Compensation Control Strategy for an Isolated Microgrid. Energies 2018, 11, 2688. [Google Scholar] [CrossRef]
- Pereira, L.F.A.; Flores, J.V.; Bonan, G.; Coutinho, D.F.; da Silva, J.M.G. Multiple Resonant Controllers for Uninterruptible Power Supplies—A Systematic Robust Control Design Approach. IEEE Trans. Ind. Electron. 2014, 61, 1528–1538. [Google Scholar] [CrossRef]
- Hasanzadeh, A.; Edrington, C.S.; Mokhtari, H.; Maghsoudlou, B.; Fleming, F. Multi-Loop Linear Resonant Voltage Source Inverter Controller Design for Distorted Loads Using the Linear Quadratic Regulator Method. IET Power Electron. 2012, 5, 841–851. [Google Scholar] [CrossRef]
- Loh, P.C.; Newman, M.J.; Zmood, D.N.; Holmes, D.G. A Comparative Analysis of Multiloop Voltage Regulation Strategies for Single and Three-Phase UPS Systems. IEEE Trans. Power Electron. 2003, 18, 1176–1185. [Google Scholar]
- Demirkutlu, E.; Hava, A.M. A Scalar Resonant-Filter-Bank-Based Output-Voltage Control Method and a Scalar Minimum-Switching-Loss Discontinuous PWM Method for the Four-Leg-Inverter-Based Three-Phase Four-Wire Power Supply. IEEE Trans. Ind. Appl. 2009, 45, 982–991. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, J.; Zhao, Y. A Unified Control Strategy for Three-Phase Inverter in Distributed Generation. IEEE Trans Power Electron 2014, 29, 1176–1191. [Google Scholar] [CrossRef]
- Shahparasti, M.; Mohamadian, M.; Yazdian, A.; Ahmad, A.A.; Amini, M. Derivation of a Stationary-Frame Single-Loop Controller for Three-Phase Standalone Inverter Supplying Nonlinear Loads. IEEE Trans. Power Electron. 2014, 29, 5063–5071. [Google Scholar] [CrossRef]
- Cárdenas, R.; Juri, C.; Peña, R.; Wheeler, P.; Clare, J. The Application of Resonant Controllers to Four-Leg Matrix Converters Feeding Unbalanced or Nonlinear Loads. IEEE Trans. Power Electron. 2012, 27, 1120–1129. [Google Scholar] [CrossRef]
- Li, Y.; Vilathgamuwa, D.M.; Loh, P.C. Microgrid Power Quality Enhancement Using a Three-Phase Four-Wire Grid-Interfacing Compensator. IEEE Trans. Ind. Appl. 2005, 41, 1707–1719. [Google Scholar] [CrossRef]
- Etxeberria-Otadui, I.; Viscarret, U.; Caballero, M.; Rufer, A.; Bacha, S. New Optimized PWM VSC Control Structures and Strategies Under Unbalanced Voltage Transients. IEEE Trans. Ind. Electron. 2007, 54, 2902–2914. [Google Scholar] [CrossRef]
- Svensson, J.; Bongiorno, M.; Sannino, A. Practical Implementation of Delayed Signal Cancellation Method for Phase-Sequence Separation. IEEE Trans. Power Deliv. 2007, 22, 18–26. [Google Scholar] [CrossRef]
- Alepuz, S.; Busquets-Monge, S.; Bordonau, J.; Martinez-Velasco, J.A.; Silva, C.A.; Pontt, J.; Rodriguez, J. Control Strategies Based on Symmetrical Components for Grid-Connected Converters Under Voltage Dips. IEEE Trans. Ind. Electron. 2009, 56, 2162–2173. [Google Scholar] [CrossRef]
- Rao, U.K.; Mishra, M.K.; Ghosh, A. Control Strategies for Load Compensation Using Instantaneous Symmetrical Component Theory Under Different Supply Voltages. IEEE Trans. Power Deliv. 2008, 23, 2310–2317. [Google Scholar] [CrossRef]
- Cárdenas, R.; Peña, R.; Wheeler, P.; Clare, J.; Juri, C. Control of a Matrix Converter for the Operation of Autonomous Systems. Renew Energy 2012, 43, 343–353. [Google Scholar] [CrossRef]
- Fortescue, C.L. Method of Symmetrical Co-Ordinates Applied to the Solution of Polyphase Networks. In Proceedings of the Transactions of the American Institute of Electrical Engineers, Atlantic City, NJ, USA, 28 June 1918; Volume XXXVII, pp. 1027–1140. [Google Scholar]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Komurcugil, H. Rotating-Sliding-Line-Based Sliding-Mode Control for Single-Phase UPS Inverters. IEEE Trans. Ind. Electron. 2012, 59, 3719–3726. [Google Scholar] [CrossRef]
- Kukrer, O.; Komurcugil, H.; Doganalp, A. A Three-Level Hysteresis Function Approach to the Sliding-Mode Control of Single-Phase UPS Inverters. IEEE Trans. Ind. Electron. 2009, 56, 3477–3486. [Google Scholar] [CrossRef]
- Tai, T.-L.; Chen, J.-S. UPS Inverter Design Using Discrete-Time Sliding-Mode Control Scheme. IEEE Trans. Ind. Electron. 2002, 49, 67–75. [Google Scholar]
- Jung, S.-L.; Tzou, Y.-Y. Discrete Sliding-Mode Control of a PWM Inverter for Sinusoidal Output Waveform Synthesis with Optimal Sliding Curve. IEEE Trans. Power Electron. 1996, 11, 567–577. [Google Scholar] [CrossRef]
- Vazquez, S.; Rodriguez, J.; Rivera, M.; Franquelo, L.G.; Norambuena, M. Model Predictive Control for Power Converters and Drives: Advances and Trends. IEEE Trans. Ind. Electron. 2017, 64, 935–947. [Google Scholar] [CrossRef]
- Guzman, R.; de Vicuna, L.G.; Camacho, A.; Miret, J.; Rey, J.M. Receding-Horizon Model-Predictive Control for a Three-Phase VSI With an LCL Filter. IEEE Trans. Ind. Electron. 2019, 66, 6671–6680. [Google Scholar] [CrossRef]
- Nauman, M.; Hasan, A. Efficient Implicit Model-Predictive Control of a Three-Phase Inverter With an Output LC Filter. IEEE Trans. Power Electron. 2016, 31, 6075–6078. [Google Scholar] [CrossRef]
- Cortes, P.; Ortiz, G.; Yuz, J.I.; Rodriguez, J.; Vazquez, S.; Franquelo, L.G. Model Predictive Control of an Inverter with Output LC Filter for UPS Applications. IEEE Trans. Ind. Electron. 2009, 56, 1875–1883. [Google Scholar] [CrossRef]
- Lidozzi, A.; Ji, C.; Solero, L.; Zanchetta, P.; Crescimbini, F. Resonant–Repetitive Combined Control for Stand-Alone Power Supply Units. IEEE Trans. Ind. Appl. 2015, 51, 4653–4663. [Google Scholar] [CrossRef]
- Marati, N.; Prasad, D. A Modified Feedback Scheme Suitable for Repetitive Control of Inverter With Nonlinear Load. IEEE Trans. Power Electron. 2018, 33, 2588–2600. [Google Scholar] [CrossRef]
- Ramos, G.A.; Ruget, R.I.; Costa-Castello, R. Robust Repetitive Control of Power Inverters for Standalone Operation in DG Systems. IEEE Trans. Energy Convers. 2020, 35, 237–247. [Google Scholar] [CrossRef]
- Escobar, G.; Valdez, A.A.; Leyva-Ramos, J.; Mattavelli, P. Repetitive-Based Controller for a UPS Inverter to Compensate Unbalance and Harmonic Distortion. IEEE Trans. Ind. Electron. 2007, 54, 504–510. [Google Scholar] [CrossRef]
- Kim, D.E.; Lee, D.C. Feedback Linearization Control of Three-Phase UPS Inverter Systems. IEEE Trans. Ind. Electron. 2010, 57, 963–968. [Google Scholar]
- Nguyen, T.H.; Van, T.L.; Nawaz, A.; Natsheh, A. Feedback Linearization-Based Control Strategy for Interlinking Inverters of Hybrid Ac/Dc Microgrids with Seamless Operation Mode Transition. Energies 2021, 14, 5613. [Google Scholar] [CrossRef]
- Stephen, S.; Shareef, H.; Errouissi, R.; Viswambharan, A. Disturbance Observer-Based Feedback Linearization Control for Stand-Alone Inverters. In Proceedings of the IECON 2021—47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021; Volume 2021. [Google Scholar]
- Valderrama, G.E.; Stankovic, A.M.; Mattavelli, P. Dissipativity-Based Adaptive and Robust Control of UPS in Unbalanced Operation. IEEE Trans. Power Electron. 2003, 18, 1056–1062. [Google Scholar] [CrossRef]
- Bernacki, R.; Davari, D. Passivity-Based Control Design Methodology for UPS Systems. Energies 2019, 12, 4301. [Google Scholar] [CrossRef]
- Arimoto, S.; Kawamura, S.; Miyazaki, F. Bettering Operation of Robots by Learning. J. Robot. Syst. 1984, 1, 123–140. [Google Scholar] [CrossRef]
- Francis, B.A.; Wonham, W.M. The Internal Model Principle of Control Theory. Automatica 1976, 12, 457–465. [Google Scholar] [CrossRef]
- Xu, M.X.; Xu, D.; Lin, P.; Chen, M.; Ni, J.; Zhang, T. Understanding Repetitive Control and Resonant Control. In Proceedings of the 2012 3rd IEEE International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Aalborg, Denmark, 25–28 June 2012; pp. 621–627. [Google Scholar]
- Chen, W.-H.; Yang, J.; Guo, L.; Li, S. Disturbance-Observer-Based Control and Related Methods—An Overview. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar] [CrossRef]
- Li, S.; Yang, J.; Chen, W.-H.; Chen, X. Generalized Extended State Observer Based Control for Systems with Mismatched Uncertainties. IEEE Trans. Ind. Electron. 2012, 59, 4792–4802. [Google Scholar] [CrossRef]
- Guo, B.; Bacha, S.; Alamir, M.; Hably, A.; Boudinet, C. Generalized Integrator-Extended State Observer with Applications to Grid-Connected Converters in the Presence of Disturbances. IEEE Trans. Control. Syst. Technol. 2021, 29, 744–755. [Google Scholar] [CrossRef]
- Sira-Ramírez, H.; Linares-Flores, J.; García-Rodríguez, C.; Contreras-Ordaz, M.A. On the Control of the Permanent Magnet Synchronous Motor: An Active Disturbance Rejection Control Approach. IEEE Trans. Control. Syst. Technol. 2014, 22, 2056–2063. [Google Scholar] [CrossRef]
- Wang, J.; Wang, F.; Wang, G.; Li, S.; Yu, L. Generalized Proportional Integral Observer-Based Robust Finite Control Set Predictive Current Control for Induction Motor Systems with Time-Varying Disturbances. IEEE Trans. Ind. Inform. 2018, 14, 4159–4168. [Google Scholar] [CrossRef]
- Wang, Z.; Yan, Y.; Yang, J.; Li, S.; Li, Q. Robust Voltage Regulation of a DC–AC Inverter with Load Variations via a HDOBC Approach. IEEE Trans. Circuits Syst. II Express Briefs 2019, 66, 1172–1176. [Google Scholar] [CrossRef]
- Errouissi, R.; Shareef, H.; Awwad, F. Disturbance Observer-Based Control for Three-Phase Grid-Tied Inverter with LCL Filter. IEEE Trans. Ind. Appl. 2021, 57, 5411–5424. [Google Scholar] [CrossRef]
- Sharma, R.K.; Mishra, S.; Mudaliyar, S.R. Nonlinear Disturbance Observer Based Control of Three Phase Grid Forming Inverter for Distributed Generation System. In Proceedings of the 2018 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Chennai, India, 18–21 December 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Kim, J.-H.; Sul, S.-K. A Carrier-Based PWM Method for Three-Phase Four-Leg Voltage Source Converters. IEEE Trans. Power Electron. 2004, 19, 66–75. [Google Scholar]
- Jacobina, C.B.; Nogueira Lima, A.M.; da Silva, E.R.C.; Alves, R.N.C.; Seixas, P.F. Digital Scalar Pulse-Width Modulation: A Simple Approach to Introduce Nonsinusoidal Modulating Waveforms. IEEE Trans. Power Electron. 2001, 16, 351–359. [Google Scholar] [CrossRef]
- Zhang, R.; Prasad, V.H.; Boroyevich, D.; Lee, F.C. Three-Dimensional Space Vector Modulation for Four-Leg Voltage-Source Converters. IEEE Trans. Power Electron. 2002, 17, 314–326. [Google Scholar] [CrossRef]
- Fernandes, D.A.; Costa, F.F.; Vitorino, M.A.; Queiroz, K.I.P.M.; Salvadori, F. Carrier-Based PWM Scheme for Three-Phase Four-Leg Inverters. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 3353–3358. [Google Scholar]
- Miveh, M.R.; Rahmat, M.F.; Ghadimi, A.A.; Mustafa, M.W. Control Techniques for Three-Phase Four-Leg Voltage Source Inverters in Autonomous Microgrids: A Review. Renew. Sustain. Energy Rev. 2016, 54, 1592–1610. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).