1. Introduction
In general, a Nuclear Power Plant (NPP) consists of structures, systems and components (SSCs), some of which are critical for safety and operational thermal efficiency of the NPP [
1]. Operational interruptions of these SSCs can result in a million-dollar loss a day [
2]. Therefore, accurate online condition monitoring and anomaly detection are necessary and crucial for these SSCs of a NPP [
3]. One of the important SSCs is the regulating valve, which is widely used in different parts of the NPP for various purposes to ensure the safe and reliable operation of the whole system [
4]. Such valves include safety/relief valves used in the pressurizer for regulating the pressure of the nuclear reactor coolant inventory, main steam isolation valves used in the main steam system for the rapid and tight closure of primary containment isolation, and turbine regulating/control valves used in the turbine system for regulating the steam flow to the turbine [
5]. It is highly desirable to detect faults in regulating valves as early as possible before they become inoperable.
Over the past decades, a wide range of methods for Fault Detection and Diagnosis (FDD) has been proposed within NPP applications, thus ranging from model-based and signal processing-based approaches to artificial intelligence-based and machine learning-based techniques. In [
6], a model-based method using a subspace identification model was developed to detect faulty sensors. In [
7], a signal-processing method based on time–frequency analysis was proposed, thus focusing on vibration signals to identify the operational status of various components in NPPs. In [
8], a novel method based on the transformation of impact signals using the Wigner–Ville distribution was proposed to estimate the location of loose parts. In [
9], a Long Short-Term Memory (LSTM) network was developed to perform sensor fault detection using labeled simulation data. In [
10], a convolutional gated recurrent network aided by particle swarm optimization for hyperparameters tuning was proposed to perform fault diagnosis using a simulation dataset. A detailed review of the methods developed for FDD in NPPs can be found in [
2].
Despite these developments, there are few reported works on the detection of faults in regulating valves. In [
11], a method was proposed for the fault-critical point prediction of a gate valve based on the characteristic analysis of the operational process variables using experimental data. In [
12], a fault prediction method combining Principal Component Analysis (PCA) and a neural network using experimental data was developed. In [
13], a gate recurrent unit-based method was developed for the fault diagnosis of electric gate valves using features extracted from vibration signals. In [
14], a fault diagnosis method for electric isolation valves was developed by combining a knowledge-based rule reasoning model and a data-driven gate recurrent unit model.
The fault detection and diagnostic of regulating valves in other industries are also receiving attention. In [
15], a model-based method for fault detection and isolation was proposed using fuzzy modeling to derive nonlinear models for the processes under normal and faulty conditions. The residuals obtained from these models were then used for fault detection. In [
16], an online fault detection method was proposed for monitoring the signal values of the valve supply current and spool position in relation to the spool positioning control signal. In [
17], a fault detection method was proposed based on canonical variate analysis using the simulation data of a benchmark model for a pneumatic control valve used in the power, food processing, and chemical industries. In [
18], a method based on Support Vector Machines (SVMs) was developed for fault detection in a pneumatic control valve used in the manufacturing industry. In [
19], a fault diagnostic and prognostic method based on SVMs and an Adaptive Neurofuzzy Inference System (ANFIS) was developed for a hydrocontrol valve used in the aerospace industry.
On the other hand, with the recent advancements in artificial intelligence, deep learning-based approaches have attracted attention in the field of Prognostics and Health Management (PHM), thanks to their powerful automatic feature extraction and nonlinear fitting capabilities [
20,
21]. In [
22], a valve stiction detection method based on the Convolutional Neural Network (CNN) was developed. In [
23], an internal leakage detection method based on the CNN was developed using the power spectral density images of acoustic emission signals. While these methods have performed well with large amounts of data, pure data-driven deep learning approaches generally violate physics-based laws with a lack of explainability of the detection and diagnostic results due to their black box nature. Hence, with the Physics-Informed Neural Network (PINN), a new variant of the Neural Network (NN) has been proposed in recent research works to make the black box model physically meaningful, interpretable, and applicable to different industrial scenarios by incorporating physical constraints from domain knowledge.
The demand for model interpretability and physical consistency in the PHM field has led to the recognition of the PINN as a highly promising method to improve the performance and interpretability of maintenance decision making [
24]. In [
25], a physics-informed deep learning approach based on the CNN was developed using a physics-driven loss function derived from physical knowledge to improve fault detection accuracy. In [
26], a PINN method based on Autoencoders (AEs) was developed by integrating the physics law of the current–voltage relation into the loss function to perform high impedance fault detection. In [
27], a physics-guided CNN was developed in which the CNN kernel was designed using the physical knowledge of the faulty signal of rolling element bearings. With respect to industrial actuators, only a few approaches of the PINN have been reported in the literature. In [
28], the PINN was used for system identification in servohydraulic shaking tables. In [
29], the PINN was used for the prediction of displacement in soft pneumatic actuators. In [
30], the PINN was used for distinguishing anomalies caused by the faults of actuators and sensors. Notice that these applications of the PINN are for specific objectives other than for fault detection in regulating valves.
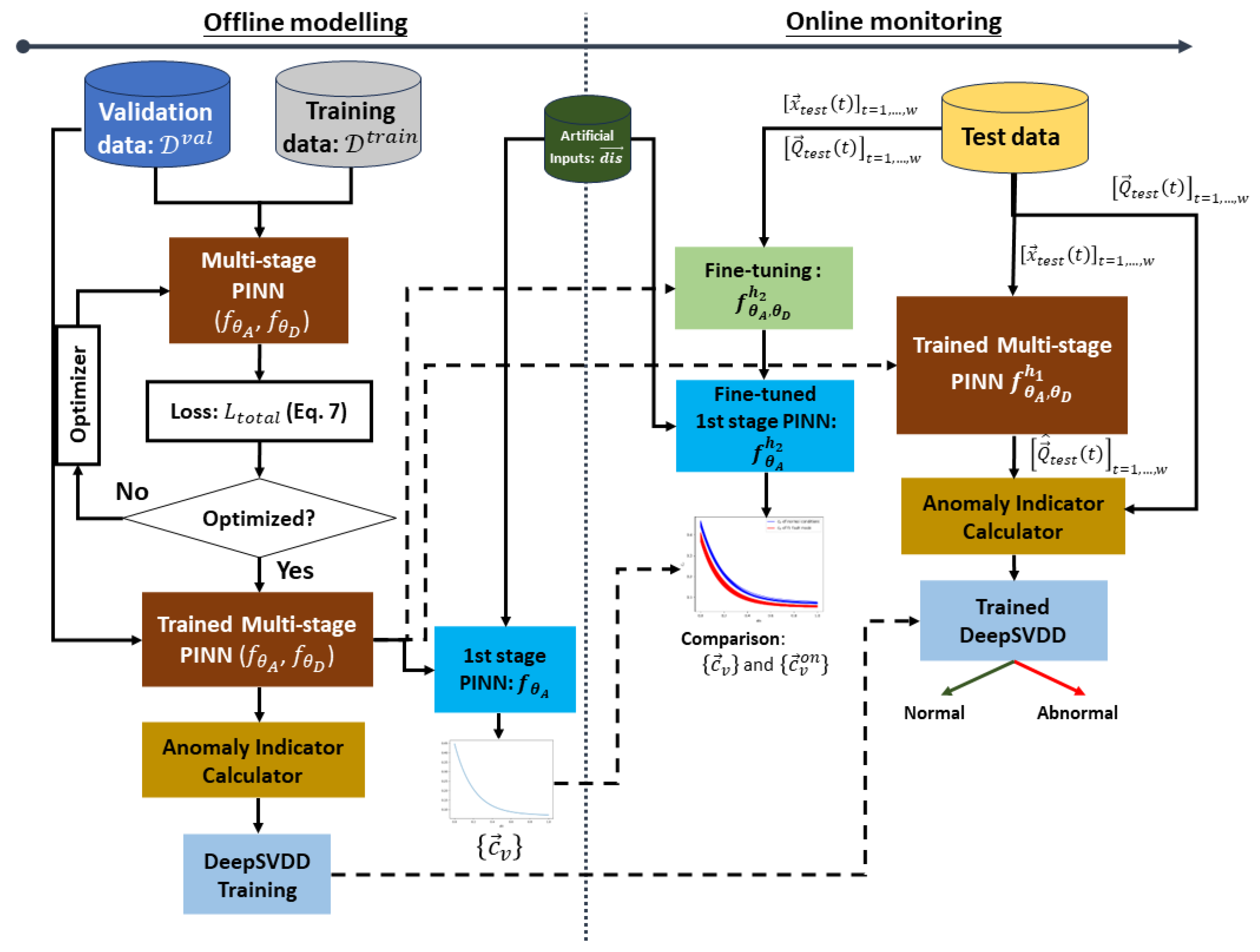
In this context, a multistage PINN combined with a Deep Support Vector Data Description (SVDD) for fault detection in regulating valves is proposed in this work. Two stages of the PINN model are built by developing the process model of the regulating valves to estimate the flow rate expected under normal conditions. In the 1st stage, a shallow NN with only one hidden layer is used to estimate the equivalent flow coefficient (a key performance indicator of the regulating valve) using the displacement of the valve as input. In the 2nd stage, a Deep Neural Network (DNN) with multiple hidden layers is used to estimate the flow rate, thus using as inputs the estimated flow coefficient from the 1st stage, the differential pressure of the regulating valve, and the liquid temperature. The development of the two stages for the PINN instead of a single deep PINN is motivated by the relevance of the flow coefficient, which serves as an input to the 2nd stage. The physics-informed loss function must also take into account this parameter (see
Section 3.1.2), given its relevance in determining the flow capacity of the regulating valves [
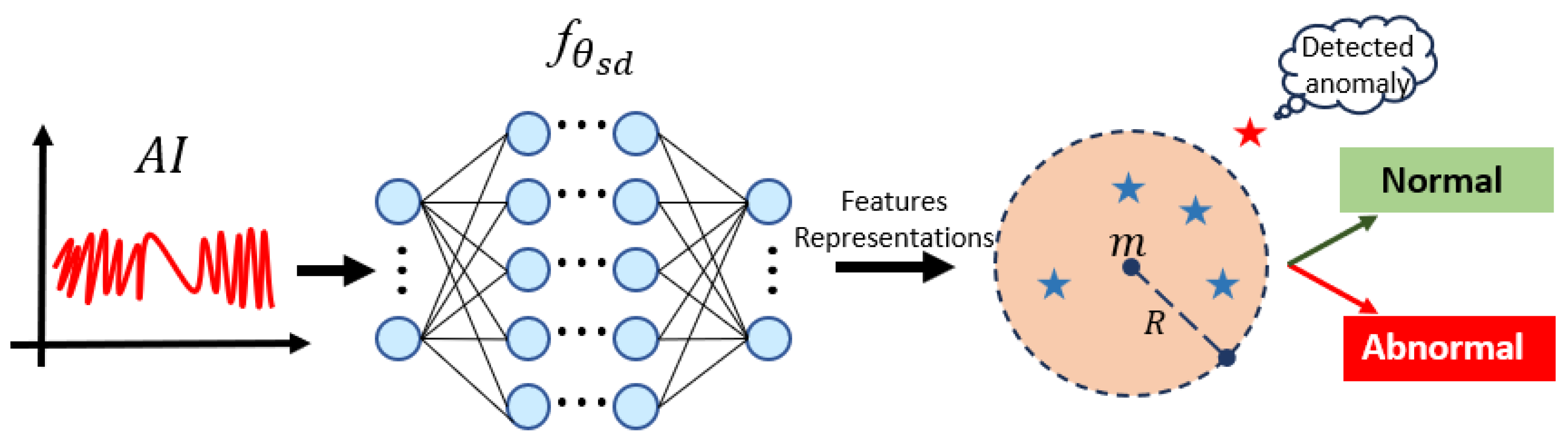
31]. Thus, by implementing the two stages of the PINN, the model can well capture the underlying physical relationships and dependencies within the system. To jointly and effectively train the multistage PINN, the basic valve sizing equation is incorporated into the PINN using a novel physical loss function. In this way, the PINN model can estimate the flow coefficient without the need for real labels. Note that the addition of the physical loss function is the primary difference between the PINN and conventional NN, which allows for training the PINN so as to conform as much as possible to the relevant physical principles under consideration. Finally, the residual of the estimation, i.e., the difference between the estimated and the measurement of flow rate, is fed into the DeepSVDD [
32], which is a deep learning variant of the SVDD that uses a DNN as a mapping function instead of a kernel function to detect the anomaly in regulating valves. In the DeepSVDD, the classifier learns to recognize the boundaries or characteristics of a single class based on the training data containing samples of only that class. The objective is to obtain a classifier that enables recognition of that class, thereby allowing the detection of all other samples not from the class as anomalies or outliers. This approach is commonly used in scenarios where samples from other classes are rare, unknown, or unavailable during the training process. In the present work, a strategy is also developed for online updating of the 1st stage of the multistage PINN for the estimation of the online flow coefficient.
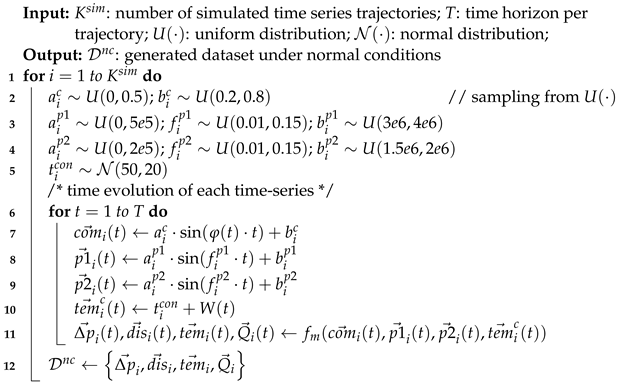
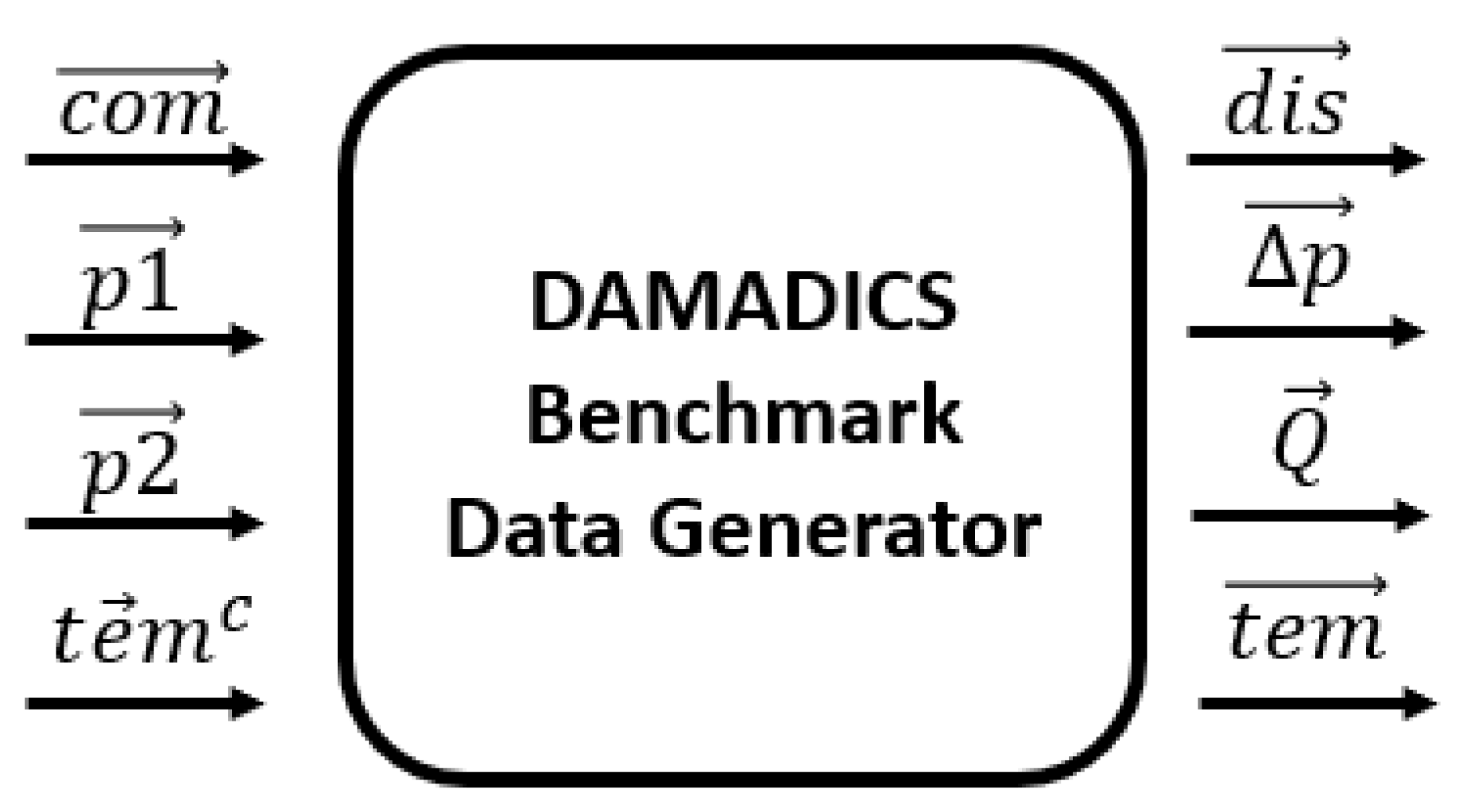
The proposed method is applied to a simulation case study and then validated on a real-world case study based on the “Development and Application of Methods for Actuator Diagnosis in Industrial Control Systems” (DAMADICS) benchmark [
31]. The obtained results, in comparison to other state-of-the-art methods, demonstrate the effectiveness of the proposed method for fault detection in regulating valves.
The main contributions of this work are as follows:
- (1)
The development of a multistage PINN model for the estimation of the flow rate signal of regulating valves;
- (2)
The formulation of a physically consistent loss function for training the multistage PINN to estimate the flow coefficient based on the online updating strategy in the absence of real labeled input data;
- (3)
The use of DeepSVDD to analyze residuals for fault detection, without the need to manually set the threshold.
The remainder of the paper is organized as follows.
Section 2 formulates the problem. In
Section 3, the proposed method is presented, and the metrics used to assess its performance are outlined in
Section 4. The application of the proposed method to both simulation and real-world case studies is discussed in
Section 5. Finally,
Section 6 presents the conclusions of the work.
2. Problem Statement
We consider a control/regulating valve, which is one of the important components of an NPP in which multiple degradation modes can occur. The valve is typically monitored by measuring a set of
N physical quantities at a generic time,
t, which can be formalized into the vector:
Such quantities include the fluid temperature, the displacement of the valve, and the differential pressure, which are expected to contain information correlated to the flow rate, , of the regulating valve, which is a crucial sensory measurement at time, t.
Without loss of generality, the dataset collected over a period of time during normal operating conditions of the regulating valve is assumed to be available, which contains the following:
- (1)
The measurement , which is historically collected during the past operation of the regulating valve, which is an -dimensional variable signal matrix, with , , being the measurement of the physical quantity j at time t;
- (2)
The flow rate measurement collected during the past operation of the regulating valve, which is a vector, with , being the measurement of the flow rate at time t.
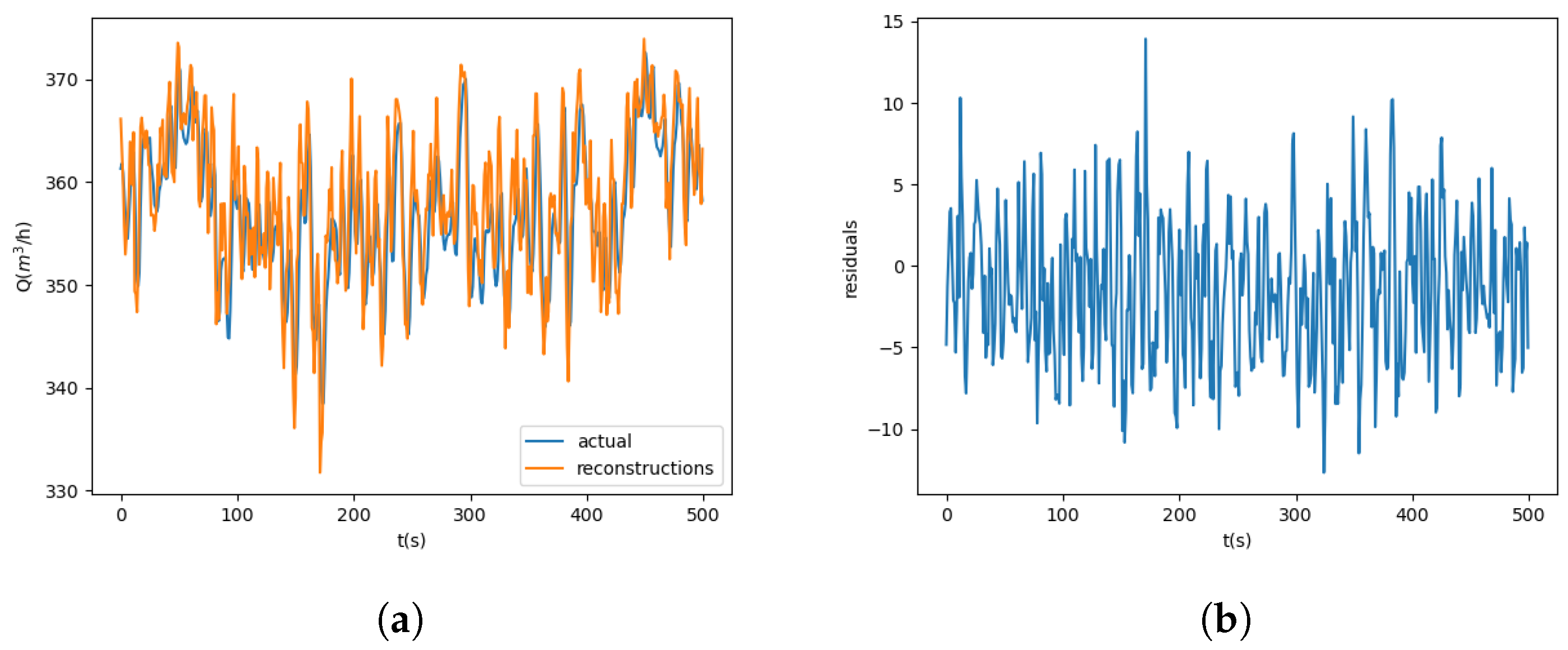
Based on the above assumption, and considering a new test input and its corresponding flow rate measured at current time t, the objective of the present work is to develop a data-driven dynamic process model, , that represents the behavior of regulating valves in normal condition, for which we have the following:
- (1)
It receives in input the online measurement at the current time t and produces in output the estimate of the observation expected in the normal condition;
- (2)
It detects the occurrence of a fault using the analysis of the residual, , between the estimate and the observation at the current time t.
4. Performance Metrics
The performance evaluation of the proposed method for fault detection employs various metrics, including accuracy, precision, recall, F1-score, and the Area Under the receiver operating characteristic Curve (
) [
36]. Specifically, the correct classification of abnormal condition patterns is referred to as the true positive (
), whereas the correct classification of normal condition patterns is referred to as the true negative (
). The false positive (
) represents the misclassification of normal condition patterns as abnormal, and the false negative (
) represents the misclassification of abnormal condition patterns as normal.
The
is defined as the fraction of correctly classified patterns among all patterns:
The is used to evaluate the overall classification performance on both normal and abnormal patterns. It is effective when there is no significant class imbalance.
The
is defined as the fraction of abnormal condition patterns correctly classified among those patterns identified as abnormal:
The is used to evaluate the performance only on the detected abnormal condition patterns: a high value implies a low false alarm rate.
The
, or sensitivity, is defined as the fraction of abnormal condition patterns correctly classified among the actual abnormal condition patterns:
The is used to evaluate the performance only on actual abnormal condition patterns: a high value implies a low missed alarm rate.
The
is defined as the fraction of normal condition patterns correctly classified among the actual normal condition patterns:
The is used to evaluate the performance only on actual normal condition patterns: a high value implies a low false alarm rate.
The
(
) is the harmonic mean of
and
:
The is used to evaluate the comprehensive performance considering the false and missed alarm rate. It provides a single value that captures the trade-off between and , thus making it particularly useful when dealing with uneven class distributions.
The
is a curve generated by plotting the recall against the false positive rate (
):
The () is calculated using an average of trapezoidal approximations. It particularly shows the performance on distinguishing normal and abnormal conditions. The values of the performance metrics , , , , and , range between 0 and 1, with a larger value indicating better performance.


 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}