
Coordinated Control of Proton Exchange Membrane Electrolyzers and Alkaline Electrolyzers for a Wind-to-Hydrogen Islanded Microgrid




Abstract
1. Introduction
2. Materials and Methods
2.1. Electrolyzer
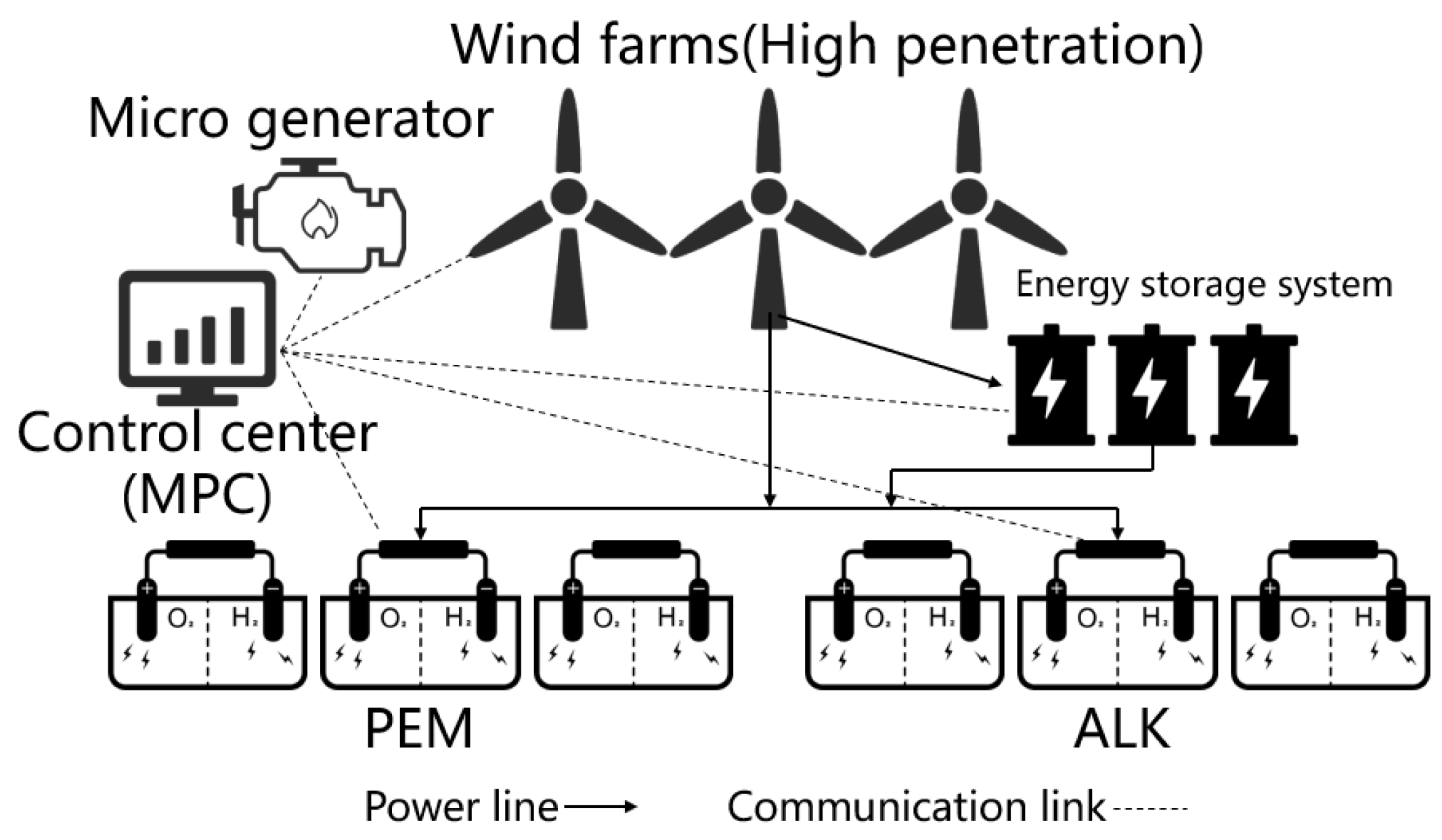
2.2. Microgrid System Overview
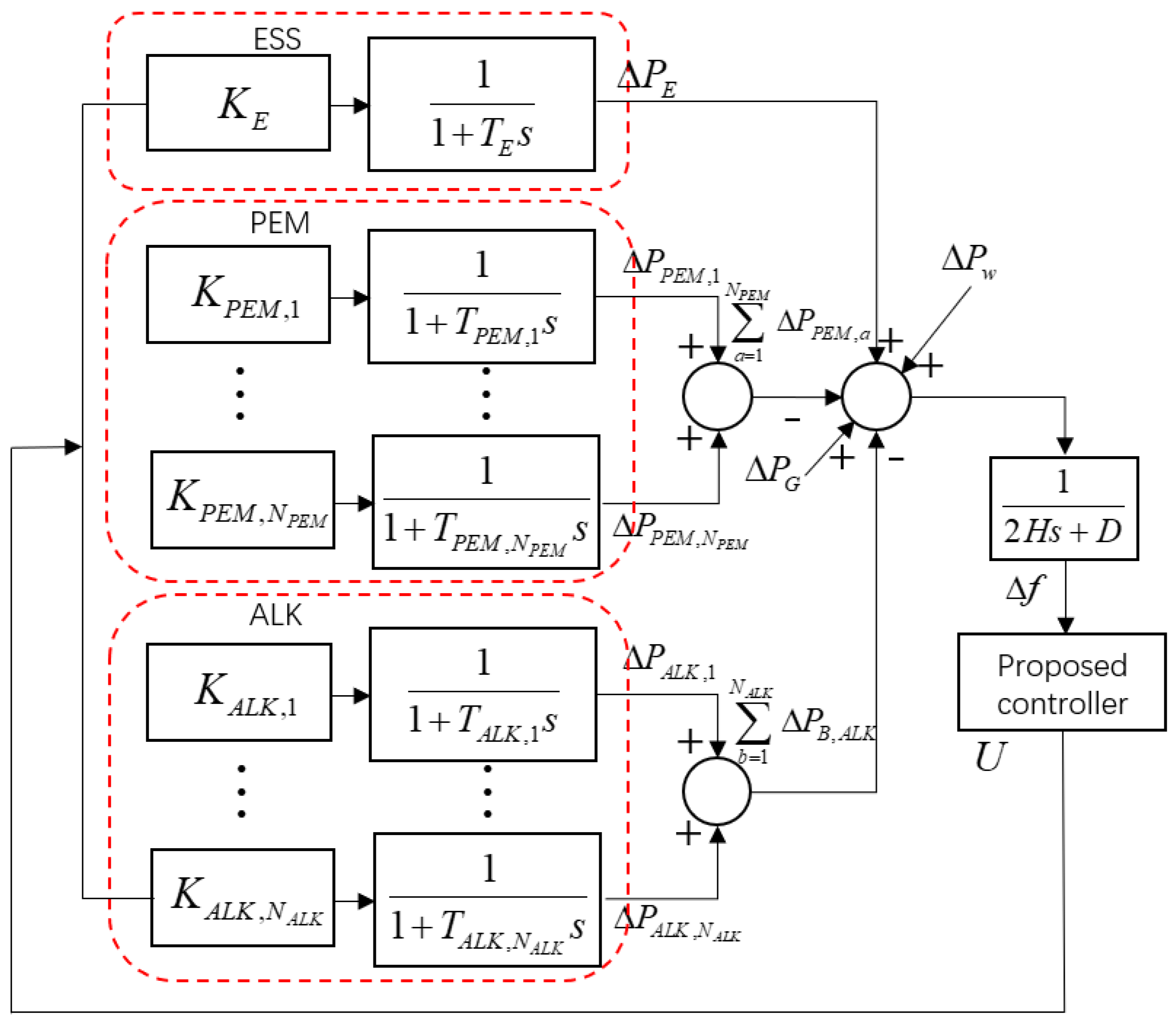
2.3. Model Predictive Control
2.4. Verification Scenario
3. Results
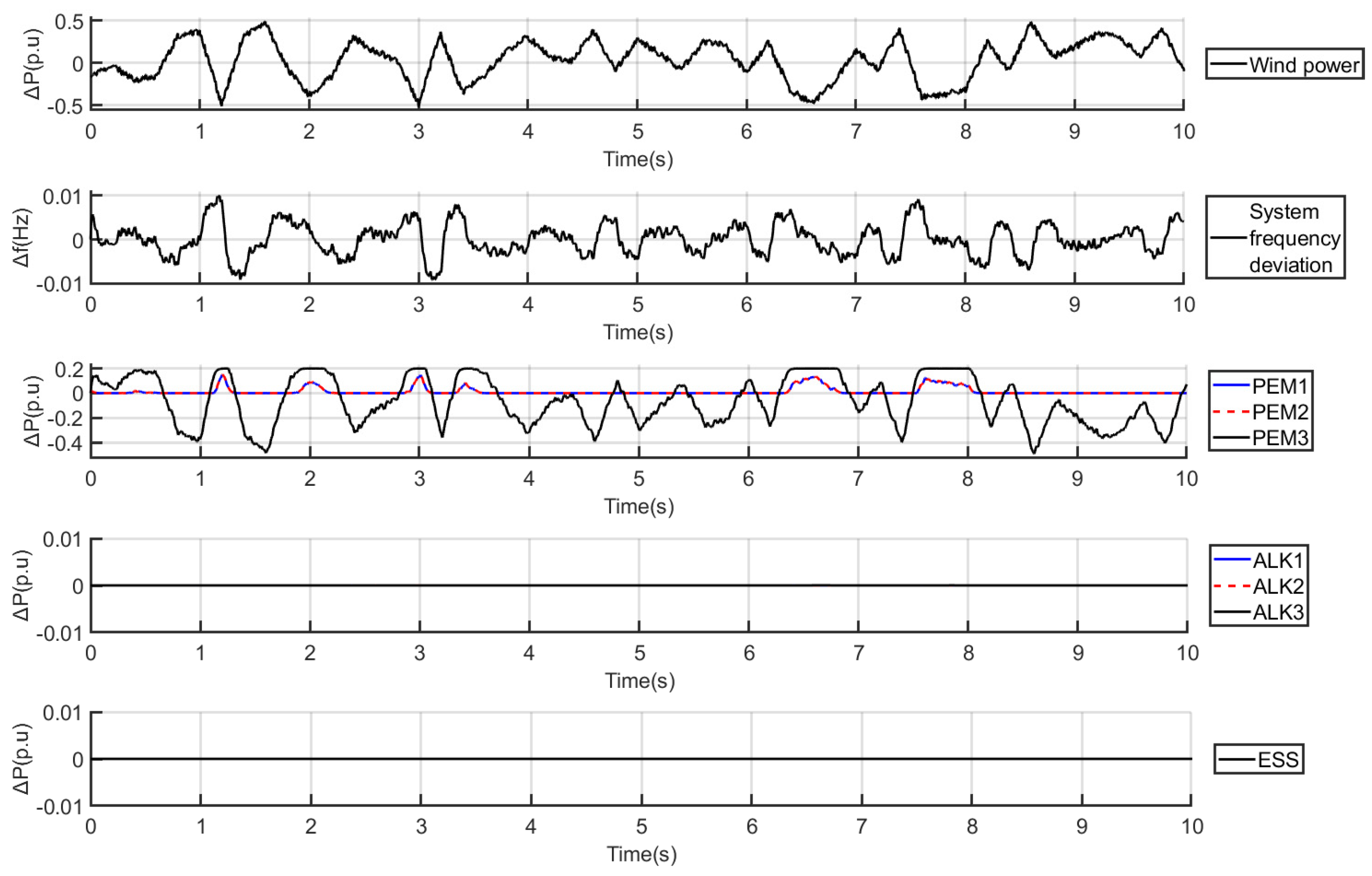
3.1. Results under Wind Power Disturbance
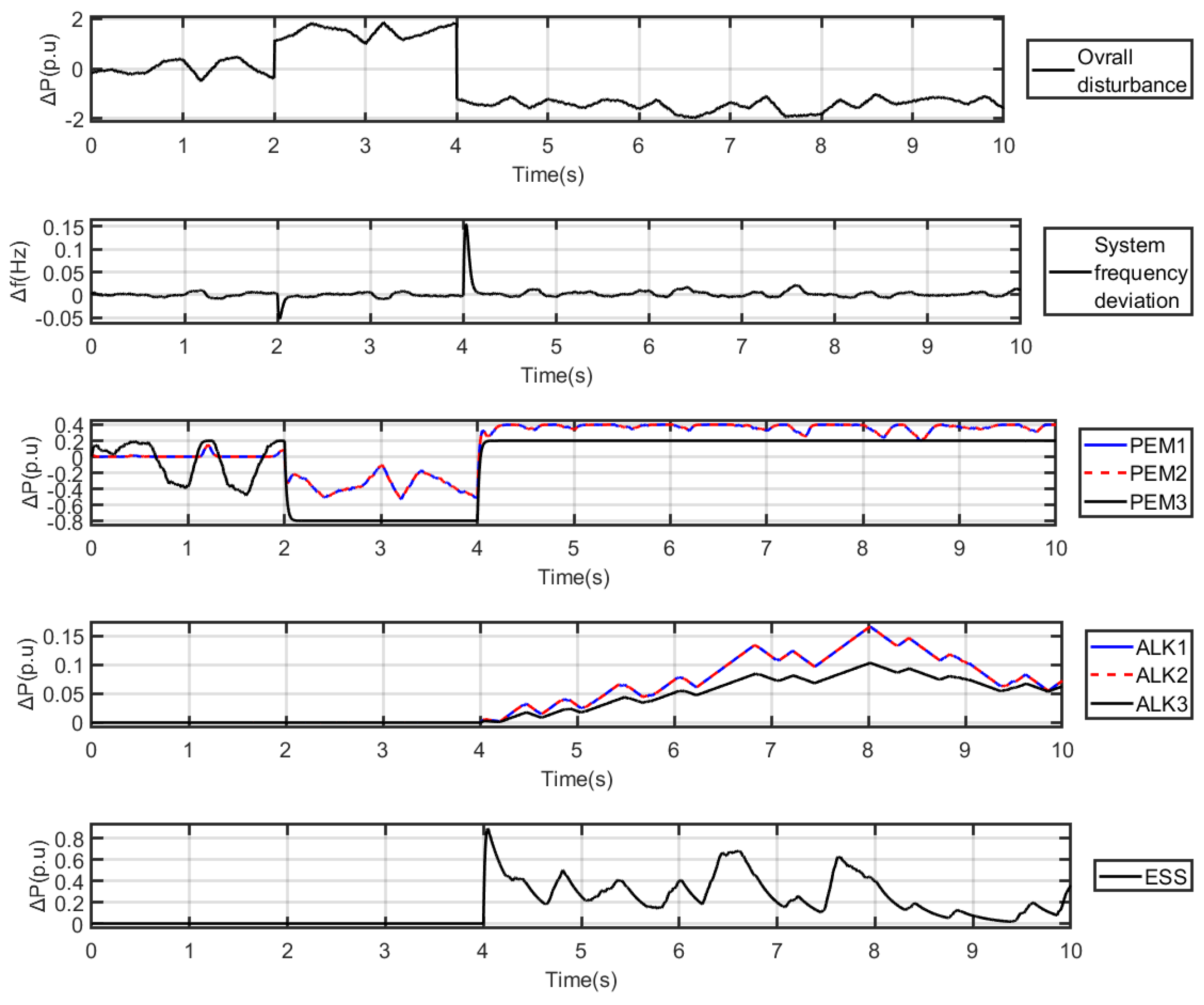
3.2. Results under Large Load Disturbance
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbol | Name Unit |
| System frequency | |
| Frequency deviation | |
| Generator inertia constant | |
| Load-damping coefficient | |
| Generator power deviation | |
| Energy storage system power deviation | |
| Wind power deviation | |
| PEM electrolyzer power deviation | |
| ALK electrolyzer power deviation | |
| Charge and discharge coefficient | |
| Dynamic response coefficient of PEM electrolyzers | |
| Dynamic response coefficient of ALK electrolyzers | |
| Time constant of energy storage system | |
| Time constant of PEM electrolyzers | |
| Time constant of ALK electrolyzers | |
| Control signal | |
| Weight on the input signal | |
| Weight on the output signal | |
| Prediction horizons | |
| Control horizons |
Appendix A. System Parameters
| Parameters | Value | Parameters | Value |
| 1 | 0.02 | ||
| 0.1 | 1 | ||
| 2.5 | 20 | ||
| 1 | 30 | ||
| 0.03 | 30 | ||
| 0.02 | 0.001 |
References
- Saint Akadiri, S.; Alola, A.A.; Akadiri, A.C.; Alola, U.V. Renewable Energy Consumption in EU-28 Countries: Policy toward Pollution Mitigation and Economic Sustainability. Energy Policy 2019, 132, 803–810. [Google Scholar] [CrossRef]
- Ameyaw, B.; Li, Y.; Ma, Y.; Agyeman, J.K.; Appiah-Kubi, J.; Annan, A. Renewable Electricity Generation Proposed Pathways for the US and China. Renew. Energy 2021, 170, 212–223. [Google Scholar] [CrossRef]
- Li, Z.; Guo, P.; Han, R.; Sun, H. Current Status and Development Trend of Wind Power Generation-Based Hydrogen Production Technology. Energy Explor. Exploit. 2019, 37, 5–25. [Google Scholar] [CrossRef]
- Trattner, A.; Höglinger, M.; Macherhammer, M.; Sartory, M. Renewable Hydrogen: Modular Concepts from Production over Storage to the Consumer. Chem. Ing. Tech. 2021, 93, 706–716. [Google Scholar] [CrossRef]
- Aliberti, P.; Sorrentino, M.; Califano, M.; Pianese, C.; Capozucca, L.; Cristiani, L.; Lops, G.; Mancini, R. Modelling Methodologies to Design and Control Renewables and Hydrogen-Based Telecom Towers Power Supply Systems. Energies 2023, 16, 6316. [Google Scholar] [CrossRef]
- Hoelzen, J.; Silberhorn, D.; Zill, T.; Bensmann, B.; Hanke-Rauschenbach, R. Hydrogen-Powered Aviation and Its Reliance on Green Hydrogen Infrastructure—Review and Research Gaps. Int. J. Hydrogen Energy 2022, 47, 3108–3130. [Google Scholar] [CrossRef]
- Shahabuddin, M.; Brooks, G.; Rhamdhani, M.A. Decarbonisation and Hydrogen Integration of Steel Industries: Recent Development, Challenges and Technoeconomic Analysis. J. Clean. Prod. 2023, 395, 136391. [Google Scholar] [CrossRef]
- Yang, S.; Peng, S.; Ling, X. Discussion on the Feasibility of the Integration of Wind Power and Coal Chemical Industries for Hydrogen Production. Sustainability 2021, 13, 11628. [Google Scholar] [CrossRef]
- Hexu, S.; Zheng, L.; Aibing, C.; Yan, Z.; Chunxiao, M. Current status and development trend of hydrogen production technology by wind power. Trans. China Electrotech. Soc. 2019, 34, 4071–4083. [Google Scholar] [CrossRef]
- Xie, X.; He, J.; Mao, H.; Li, H. New issues and classification of power system stability with high shares of renewables and power electronics. Proc. CSEE 2021, 41, 461–475. [Google Scholar] [CrossRef]
- Heylen, E.; Teng, F.; Strbac, G. Challenges and Opportunities of Inertia Estimation and Forecasting in Low-Inertia Power Systems. Renew. Sustain. Energy Rev. 2021, 147, 111176. [Google Scholar] [CrossRef]
- Eftekharnejad, S.; Vittal, V.; Heydt, G.T.; Keel, B.; Loehr, J. Small Signal Stability Assessment of Power Systems with Increased Penetration of Photovoltaic Generation: A Case Study. IEEE Trans. Sustain. Energy 2013, 4, 960–967. [Google Scholar] [CrossRef]
- Eichman, J.; Harrison, K.; Peters, M. Novel Electrolyzer Applications: Providing More Than Just Hydrogen; No. NREL/TP-5400-61758; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2014; p. 1159377.
- Valenciaga, F.; Evangelista, C.A. Control Design for an Autonomous Wind Based Hydrogen Production System. Int. J. Hydrogen Energy 2010, 35, 5799–5807. [Google Scholar] [CrossRef]
- Guo, X.; Kang, P.; Zhang, J.; Song, P.; Yang, G. Coordinated Control Strategy for System of Hydrogen Production from Renewable Energy Considering Regulating Characteristics of Electrolyzers. J. Phys. Conf. Ser. 2023, 2659, 012029. [Google Scholar] [CrossRef]
- Torreglosa, J.P.; García, P.; Fernández, L.M.; Jurado, F. Energy Dispatching Based on Predictive Controller of an Off-Grid Wind Turbine/Photovoltaic/Hydrogen/Battery Hybrid System. Renew. Energy 2015, 74, 326–336. [Google Scholar] [CrossRef]
- Tebibel, H. Methodology for Multi-Objective Optimization of Wind Turbine/Battery/Electrolyzer System for Decentralized Clean Hydrogen Production Using an Adapted Power Management Strategy for Low Wind Speed Conditions. Energy Convers. Manag. 2021, 238, 114125. [Google Scholar] [CrossRef]
- Meng, Z.; He, Q.; Shi, X.; Cao, D.; Du, D. Research on Energy Utilization of Wind-Hydrogen Coupled Energy Storage Power Generation System. Sep. Purif. Technol. 2023, 313, 123439. [Google Scholar] [CrossRef]
- Hong, Z.; Wei, Z.; Han, X. Optimization Scheduling Control Strategy of Wind-Hydrogen System Considering Hydrogen Production Efficiency. J. Energy Storage 2022, 47, 103609. [Google Scholar] [CrossRef]
- Razzhivin, I.A.; Andreev, M.V.; Kievec, A.V. Increasing the Stability of Hydrogen Production in the Wind Energy-Hydrogen System through the Use of Synthetic Inertia of the Wind Turbine. Int. J. Hydrogen Energy 2022, 47, 38495–38505. [Google Scholar] [CrossRef]
- Kim, J.; Muljadi, E.; Nelms, R.M. Modelling and Control Coordination Scheme of a Wind-to-hydrogen Set for Future Renewable-based Power Systems. IET Renew. Power Gener. 2020, 14, 3317–3326. [Google Scholar] [CrossRef]
- Zhang, M.; Xu, Q. An MPC Based Power Management Method for Renewable Energy Hydrogen Based DC Microgrids. In Proceedings of the 2023 IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 19–23 March 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 577–581. [Google Scholar]
- Zhao, Y.; Zhu, Z.; Tang, S.; Guo, Y.; Sun, H. Electrolyzer Array Alternate Control Strategy Considering Wind Power Prediction. Energy Rep. 2022, 8, 223–232. [Google Scholar] [CrossRef]
- Garcia-Torres, F.; Valverde, L.; Bordons, C. Optimal Load Sharing of Hydrogen-Based Microgrids with Hybrid Storage Using Model-Predictive Control. IEEE Trans. Ind. Electron. 2016, 63, 4919–4928. [Google Scholar] [CrossRef]
- Sarrias-Mena, R.; Fernández-Ramírez, L.M.; García-Vázquez, C.A.; Jurado, F. Electrolyzer Models for Hydrogen Production from Wind Energy Systems. Int. J. Hydrogen Energy 2015, 40, 2927–2938. [Google Scholar] [CrossRef]
- Kang, Z.; Duan, F. A Flexible Load Adaptive Control Strategy for Efficient Photovoltaic Hydrogen Generation System. Sol. Energy 2023, 266, 112150. [Google Scholar] [CrossRef]
- K/bidi, F.; Damour, C.; Grondin, D.; Hilairet, M.; Benne, M. Power Management of a Hybrid Micro-Grid with Photovoltaic Production and Hydrogen Storage. Energies 2021, 14, 1628. [Google Scholar] [CrossRef]
- Villa Londono, J.E.; Mazza, A.; Pons, E.; Lok, H.; Bompard, E. Modelling and Control of a Grid-Connected RES-Hydrogen Hybrid Microgrid. Energies 2021, 14, 1540. [Google Scholar] [CrossRef]
- Kumar, K.; Alam, M.; Dutta, V. Energy Management Strategy for Integration of Fuel Cell-Electrolyzer Technologies in Microgrid. Int. J. Hydrogen Energy 2021, 46, 33738–33755. [Google Scholar] [CrossRef]
- Abadlia, I.; Bahi, T.; Bouzeria, H. Energy Management Strategy Based on Fuzzy Logic for Compound RES/ESS Used in Stand-Alone Application. Int. J. Hydrogen Energy 2016, 41, 16705–16717. [Google Scholar] [CrossRef]
- Pei, W.; Zhang, X.; Deng, W.; Tang, C.; Yao, L. Review on Operation Control Strategy of DC Microgrid with Electric-Hydrogen Hybrid Storage System. CSEE J. Power Energy Syst. 2022, 8, 329–346. [Google Scholar] [CrossRef]
- Buttler, A.; Spliethoff, H. Current Status of Water Electrolysis for Energy Storage, Grid Balancing and Sector Coupling via Power-to-Gas and Power-to-Liquids: A Review. Renew. Sustain. Energy Rev. 2018, 82, 2440–2454. [Google Scholar] [CrossRef]
- Shen, X.; Zhang, X.; Li, G.; Lie, T.T.; Hong, L. Experimental Study on the External Electrical Thermal and Dynamic Power Characteristics of Alkaline Water Electrolyzer. Int. J. Energy Res. 2018, 10, 3244–3257. [Google Scholar] [CrossRef]
- Brauns, J.; Turek, T. Alkaline Water Electrolysis Powered by Renewable Energy: A Review. Processes 2020, 8, 248. [Google Scholar] [CrossRef]
- Miller, H.A.; Bouzek, K.; Hnat, J.; Loos, S.; Bernäcker, C.I.; Weißgärber, T.; Röntzsch, L.; Meier-Haack, J. Green Hydrogen from Anion Exchange Membrane Water Electrolysis: A Review of Recent Developments in Critical Materials and Operating Conditions. Sustain. Energy Fuels 2020, 4, 2114–2133. [Google Scholar] [CrossRef]
- Yu, Z.; Jia, X.; Cai, Y.; Su, R.; Zhu, Q.; Zhao, T.; Jiang, H. Electrolyte Engineering for Efficient and Stable Vanadium Redox Flow Batteries. Energy Storage Mater. 2024, 69, 103404. [Google Scholar] [CrossRef]
- Bevrani, H.; Feizi, M.R.; Ataee, S. Robust Frequency Control in an Islanded Microgrid: H∞ and μ-Synthesis Approaches. IEEE Trans. Smart Grid 2015, 7, 706–717. [Google Scholar] [CrossRef]
- Xing, L.; Mishra, Y.; Tian, Y.-C.; Ledwich, G.; Su, H.; Peng, C.; Fei, M. Dual-Consensus-Based Distributed Frequency Control for Multiple Energy Storage Systems. IEEE Trans. Smart Grid 2019, 10, 6396–6403. [Google Scholar] [CrossRef]
- Mayne, D.Q.; Rawlings, J.B.; Rao, C.V.; Scokaert, P.O.M. Constrained Model Predictive Control: Stability and Optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]
- Oshnoei, A.; Kheradmandi, M.; Muyeen, S.M. Robust Control Scheme for Distributed Battery Energy Storage Systems in Load Frequency Control. IEEE Trans. Power Syst. 2020, 35, 4781–4791. [Google Scholar] [CrossRef]
- Sockeel, N.; Gafford, J.; Papari, B.; Mazzola, M. Virtual Inertia Emulator-Based Model Predictive Control for Grid Frequency Regulation Considering High Penetration of Inverter-Based Energy Storage System. IEEE Trans. Sustain. Energy 2020, 11, 2932–2939. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance and Economic Characteristics | ALK | PEM | |
|---|---|---|---|
| ALK Better | Lifetime (kh) | 55–120 | 60–100 |
| Efficiency degradation (%/a) | 0.25–1.5 | 0.5–2.5 | |
| Investment costs (€/kW) | 800–1500 | 1400–2100 | |
| Maintenance costs (% of investment costs per year) | 2–3 | 3–5 | |
| Nominal stack efficiency (%) | 63–71 | 60–68 | |
| PEM Better | Load flexibility (% of nominal load) | 20–120 | 0–120 |
| Cell area (m2) | <3.6 | <0.13 | |
| Typical pressure (bar) | 10–30 | 50–80 | |
| Hydrogen purity (%) | 99.8 | >99.99 | |
| System response | Seconds | Milliseconds | |
| Operating temperature (°C) | 60–80 | 50–80 |
| Scenario | Parameters | PEM/ALK | All ALK |
|---|---|---|---|
| Under wind power disturbance | Max frequency deviation (Hz) | 0.01 | 0.02 |
| Max absolute ESS power (p.u) | 0 | 0.5 | |
| Under large load disturbance | Max frequency deviation (Hz) | 0.15 | 0.2 |
| Max absolute ESS power (p.u) | 0.8 | 2.5 | |
| Max regulation time (s) | 0.2 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Tu, Z.; Yi, Z.; Xu, Y. Coordinated Control of Proton Exchange Membrane Electrolyzers and Alkaline Electrolyzers for a Wind-to-Hydrogen Islanded Microgrid. Energies 2024, 17, 2317. https://doi.org/10.3390/en17102317
Li Z, Tu Z, Yi Z, Xu Y. Coordinated Control of Proton Exchange Membrane Electrolyzers and Alkaline Electrolyzers for a Wind-to-Hydrogen Islanded Microgrid. Energies. 2024; 17(10):2317. https://doi.org/10.3390/en17102317
Chicago/Turabian StyleLi, Zhanfei, Zhenghong Tu, Zhongkai Yi, and Ying Xu. 2024. "Coordinated Control of Proton Exchange Membrane Electrolyzers and Alkaline Electrolyzers for a Wind-to-Hydrogen Islanded Microgrid" Energies 17, no. 10: 2317. https://doi.org/10.3390/en17102317
APA StyleLi, Z., Tu, Z., Yi, Z., & Xu, Y. (2024). Coordinated Control of Proton Exchange Membrane Electrolyzers and Alkaline Electrolyzers for a Wind-to-Hydrogen Islanded Microgrid. Energies, 17(10), 2317. https://doi.org/10.3390/en17102317