
Improved State-of-Charge Estimation of Lithium-Ion Battery for Electric Vehicles Using Parameter Estimation and Multi-Innovation Adaptive Robust Unscented Kalman Filter


Abstract
1. Introduction
2. Battery Model and Parameter Identification
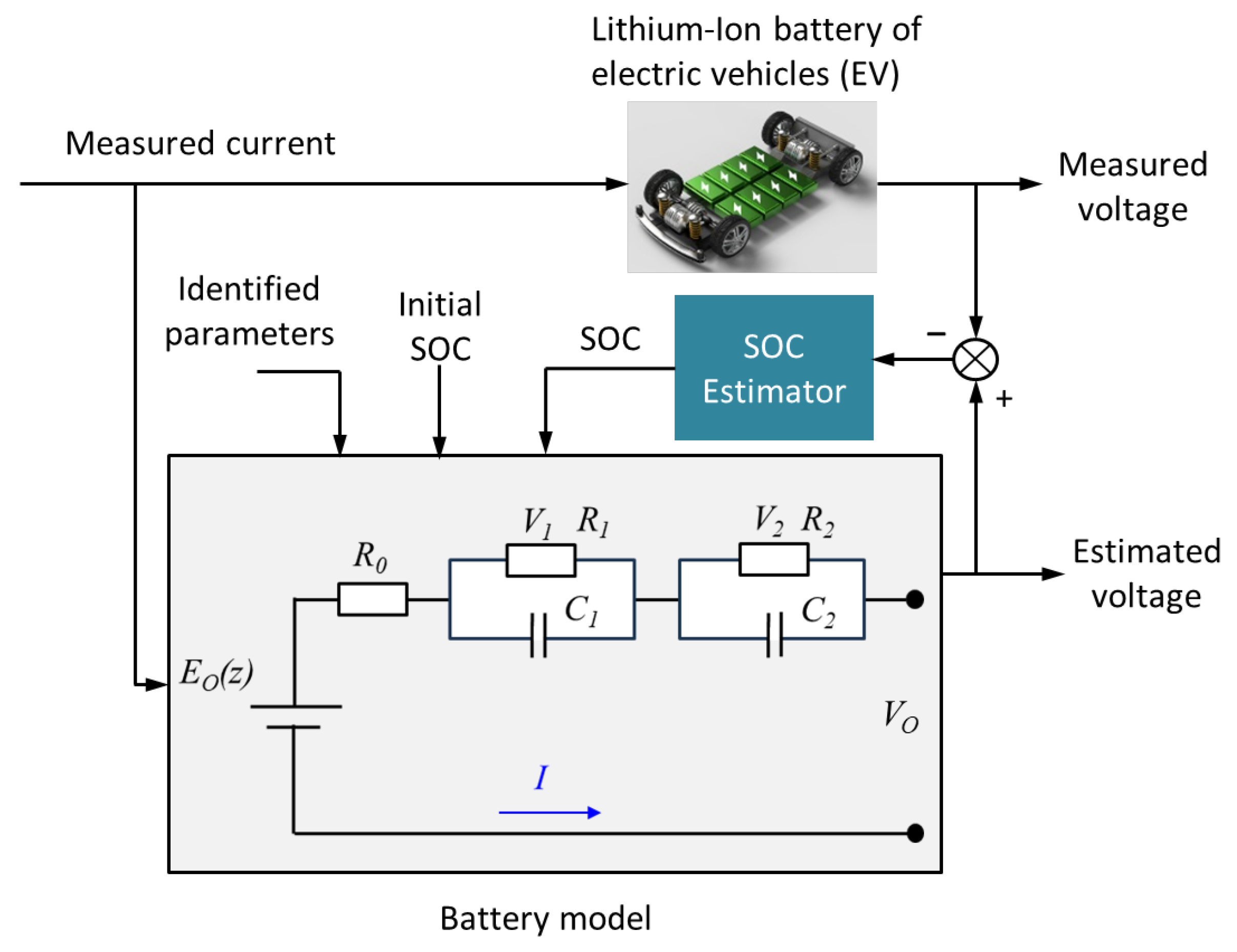
2.1. Battery Model
2.2. Online Parameter Identification of Battery Model
2.2.1. The Initial Values and Nonlinear Function
2.2.2. EKF-Based Online Parameter Estimation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initialization | (12) |
| For , calculation: Step 1 Macroscale EKF parameter filter time update equation | (13) |
|
For , compute state filters at each micro scale Step 2 Microscale MIARUKF filter state time and measurement update equations Equations (17)–(33) | |
| Step 3 For time-series calculation , L is set to 60 s Equations (17)–(33) | |
| Step 4 Timescale transform | (14) |
| For , calculation: Step 5 Macroscale EKF parametric filter update equation | (15) |
| where | (16) |
3. SOC Estimation
3.1. Overview
- where and represent the weights for calculating the mean and covariance, respectively, and is a nonnegative term, and, in this study, the Gaussian random variable is set to 2.
- Update the a priori state value and the system variance prediction :where represents the system noise covariance matrix.
- Update observation and observation variance prediction :where represents the process noise covariance matrix.
- Update covariance , Kalman gain and state error covariance :where
- Multi-Innovation Status Measurement Update:where b denotes the length of the innovation. The weights at different moments are represented by Equation (25), which ensures the maximum weight at the current moment.
- Update adaptive process noise covariance matrix and measurement noise covariance matrix :
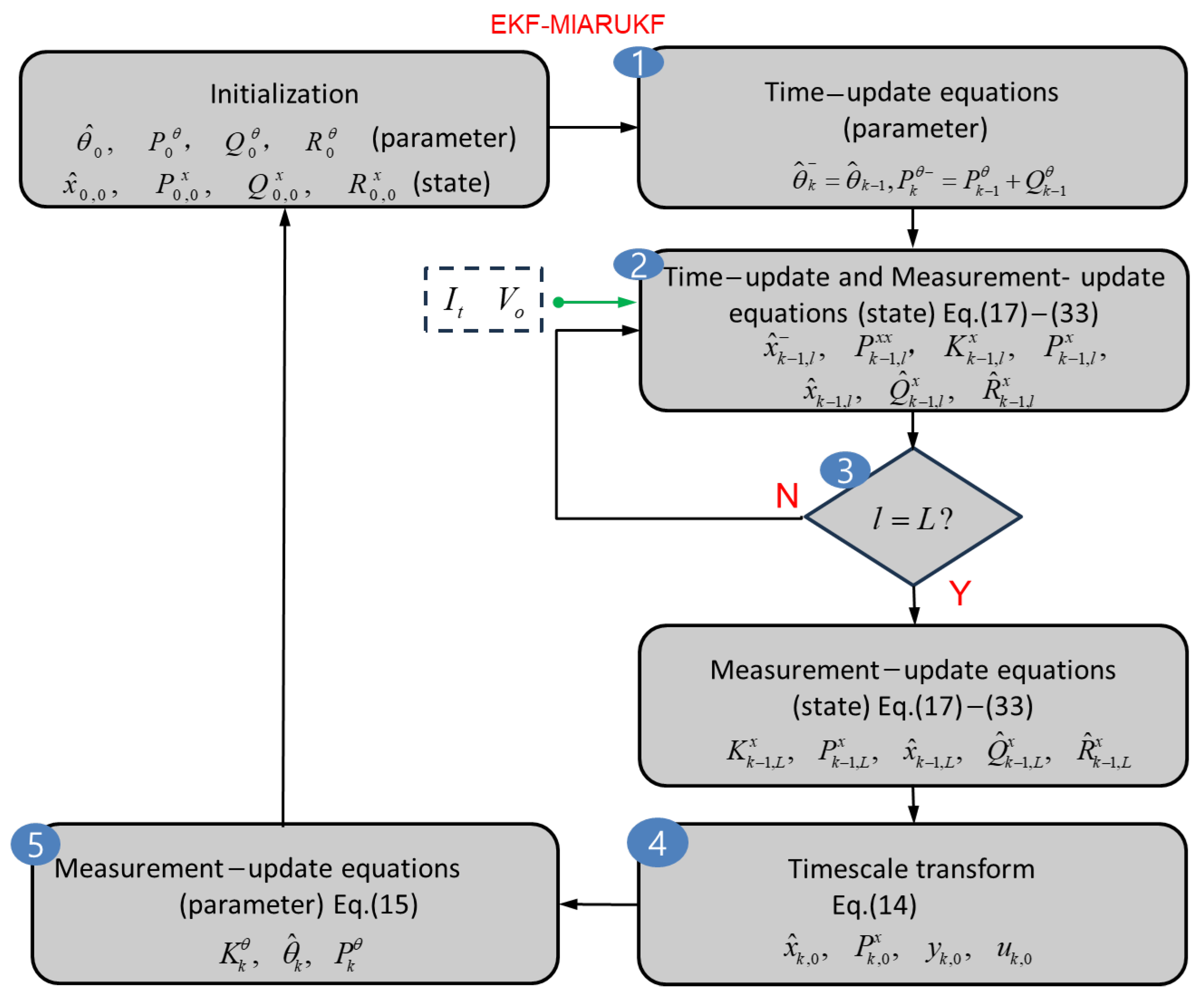
3.2. Implementation of the Co-Estimation Algorithm
- At each macroscale level, the EKF performs a temporal update and computes a priori parameter estimates and error covariances using Equation (13). The battery capacity was updated along with the battery model parameters.
- After the temporal update of the macroscopic EKF, state estimation and measurement updates of the microscopic MIARUKF were performed at each microscale using . The a priori state estimation and its error covariance , the a posteriori state estimation and its error covariance , the adaptive process noise covariance , and the adaptive measurement noise covariance were computed from Equations (17)–(33).
- After a posteriori estimation was completed, we compared the microscale l and timescale separation level L. If microscale l does not reach L, the state estimate is passed to step 2 and used as the initial value at time before the state estimation is performed. If l reaches L, the a posteriori state estimate and its error covariance , adaptive process noise covariance , and adaptive measurement noise covariance can be updated using Equations (17)–(33) for the next macro time.
- Update all microscopic timescales according to Equation (14); for example, . In simpler terms, the estimates at are ready to be updated for parameter and next-state estimations.
- After state estimation, the macroscopic EKF performs measurement updating, where the posterior estimate and covariance are computed from Equation (15).
4. Experimental Validation and Discussion
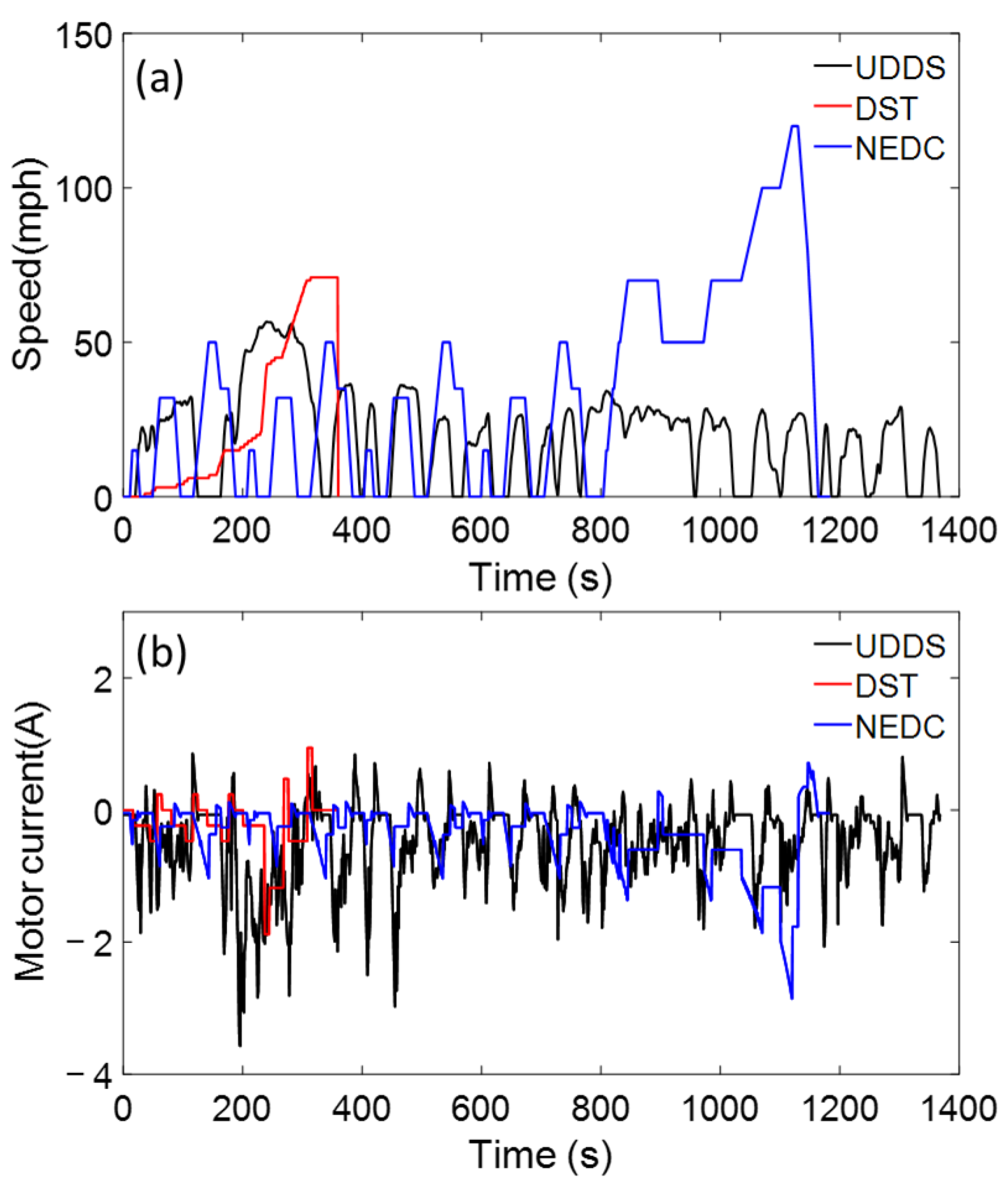
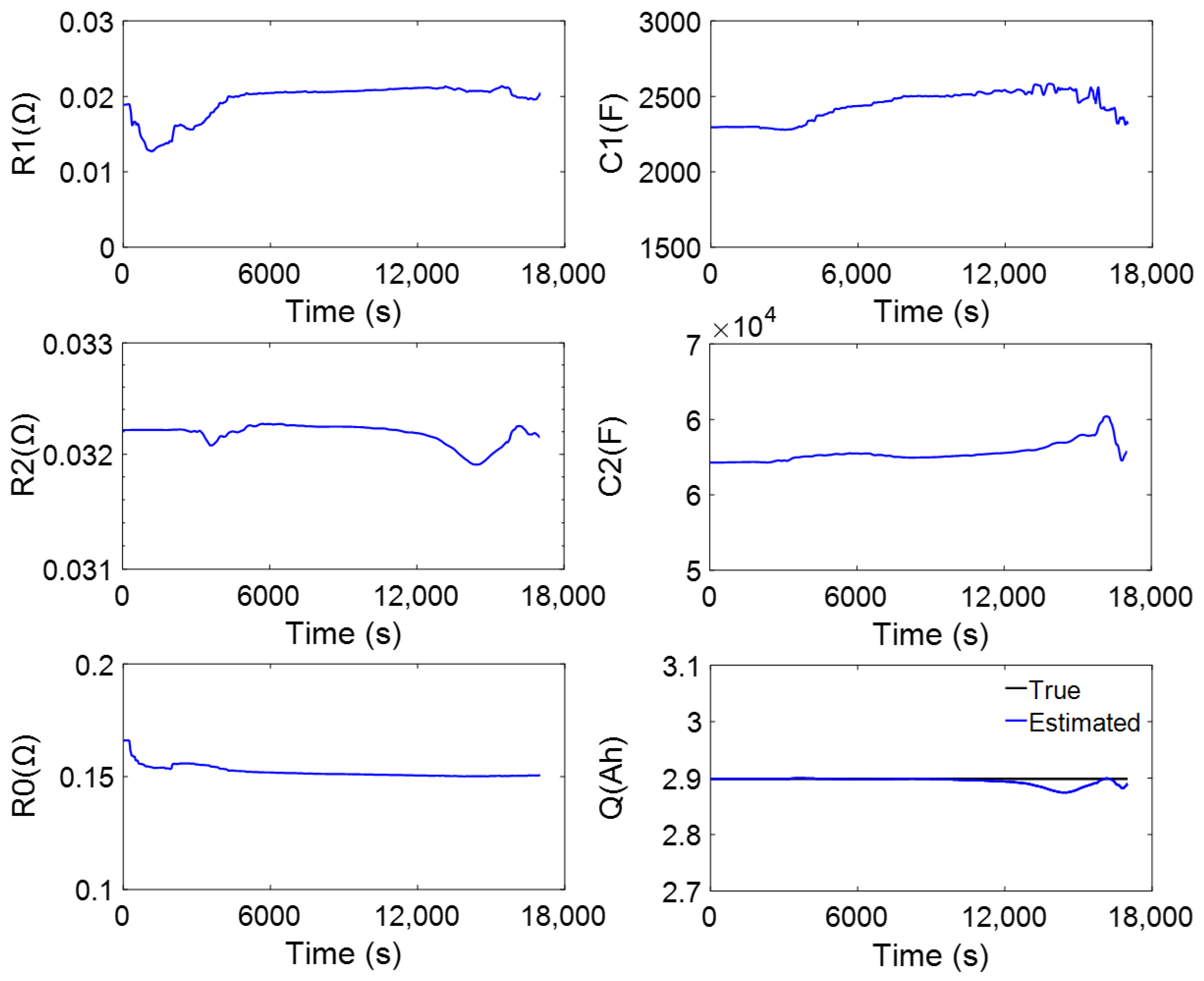
4.1. Dynamic Condition Testing
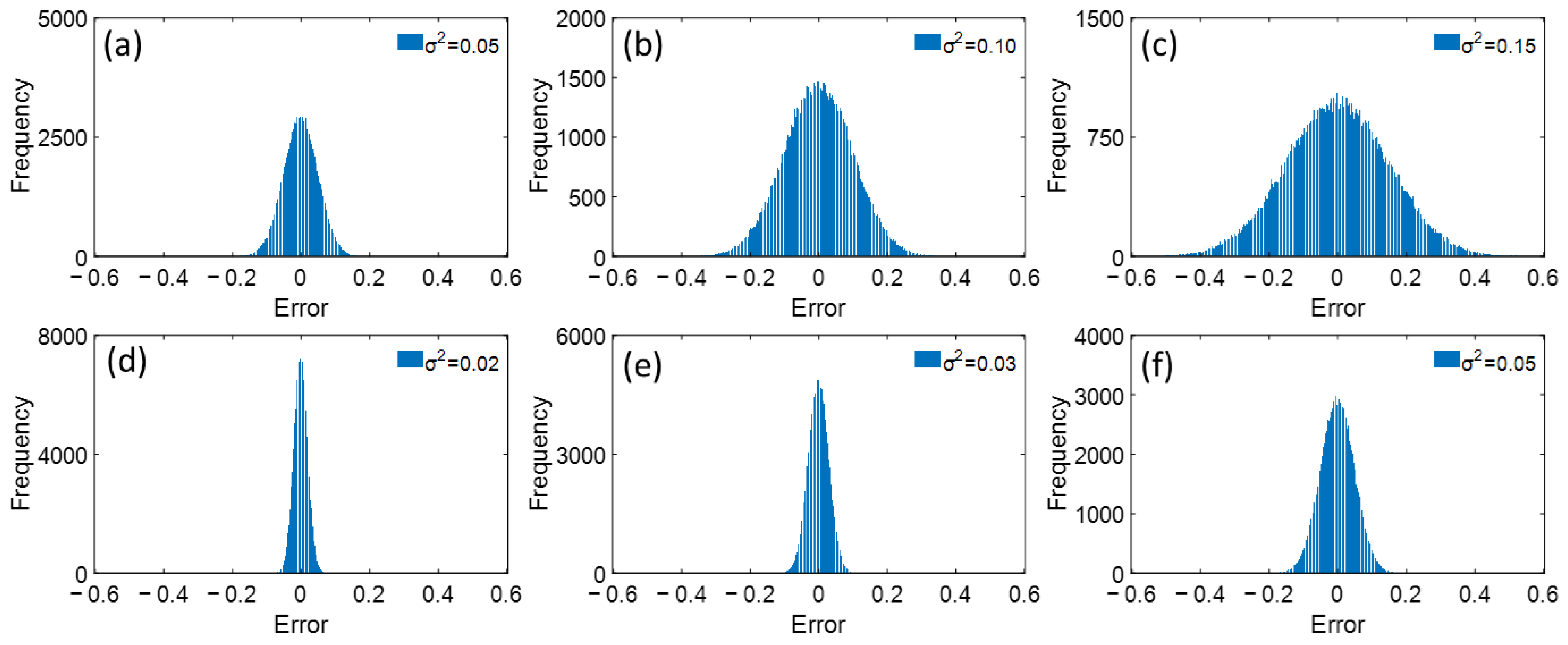
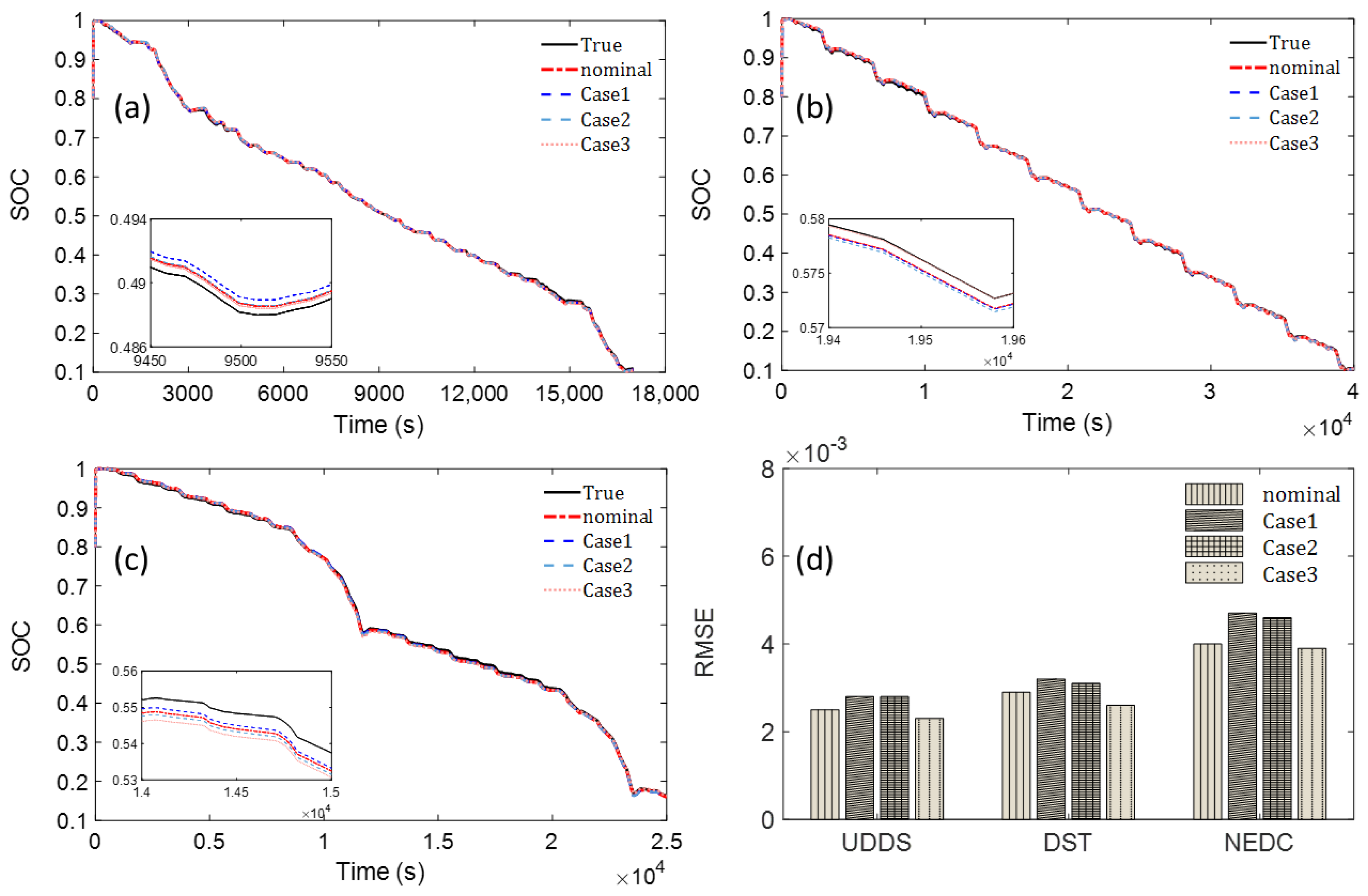
4.2. Robustness Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hu, X.; Yuan, H.; Zou, C.; Li, Z.; Zhang, L. Co-estimation of state of charge and state of health for lithium-ion batteries based on fractional-order calculus. IEEE Trans. Veh. Technol. 2018, 67, 10319–10329. [Google Scholar] [CrossRef]
- Takami, N.; Inagaki, H.; Tatebayashi, Y.; Saruwatari, H.; Honda, K.; Egusa, S. High-power and long-life lithium-ion batteries using lithium titanium oxide anode for automotive and stationary power applications. J. Power Sources 2013, 244, 469–475. [Google Scholar] [CrossRef]
- Hoque, M.; Hannan, M.; Mohamed, A.; Ayob, A. Battery charge equalization controller in electric vehicle applications: A review. Renew. Sustain. Energy Rev. 2017, 75, 1363–1385. [Google Scholar] [CrossRef]
- Cheng, K.W.E.; Divakar, B.; Wu, H.; Ding, K.; Ho, H.F. Battery-management system (BMS) and SOC development for electrical vehicles. IEEE Trans. Veh. Technol. 2010, 60, 76–88. [Google Scholar] [CrossRef]
- Waag, W.; Fleischer, C.; Sauer, D.U. Critical review of the methods for monitoring of lithium-ion batteries in electric and hybrid vehicles. J. Power Sources 2014, 258, 321–339. [Google Scholar] [CrossRef]
- Ng, K.S.; Moo, C.-S.; Chen, Y.-P.; Hsieh, Y.-C. Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries. Appl. Energy 2009, 86, 1506–1511. [Google Scholar] [CrossRef]
- Xing, Y.; He, W.; Pecht, M.; Tsui, K.L. State of charge estimation of lithium-ion batteries using the open-circuit voltage at various ambient temperatures. Appl. Energy 2014, 113, 106–115. [Google Scholar] [CrossRef]
- Yang, N.; Zhang, X.; Li, G. State of charge estimation for pulse discharge of a LiFePO4 battery by a revised Ah counting. Electrochim. Acta 2015, 151, 63–71. [Google Scholar] [CrossRef]
- Chemali, E.; Kollmeyer, P.J.; Preindl, M.; Emadi, A. State-of-charge estimation of Li-ion batteries using deep neural networks: A machine learning approach. J. Power Sources 2018, 400, 242–255. [Google Scholar] [CrossRef]
- How, D.N.; Hannan, M.A.; Lipu, M.S.H.; Sahari, K.S.; Ker, P.J.; Muttaqi, K.M. State-of-charge estimation of li-ion battery in electric vehicles: A deep neural network approach. IEEE Trans. Ind. Appl. 2020, 56, 5565–5574. [Google Scholar] [CrossRef]
- Chen, C.; Xiong, R.; Yang, R.; Shen, W.; Sun, F. State-of-charge estimation of lithium-ion battery using an improved neural network model and extended Kalman filter. J. Clean. Prod. 2019, 234, 1153–1164. [Google Scholar] [CrossRef]
- Hannan, M.A.; Lipu, M.S.H.; Hussain, A.; Saad, M.H.; Ayob, A. Neural network approach for estimating state of charge of lithium-ion battery using backtracking search algorithm. IEEE Access 2018, 6, 10069–10079. [Google Scholar] [CrossRef]
- Anton, J.C.A.; Nieto, P.J.G.; Viejo, C.B.; Vilán, J.A.V. Support vector machines used to estimate the battery state of charge. IEEE Trans. Power Electron. 2013, 28, 5919–5926. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, D.; Zhang, X.; Chen, Z. Probability based remaining capacity estimation using data-driven and neural network model. J. Power Sources 2016, 315, 199–208. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, D.; Yang, B.; Cui, X.; Li, X. Electrochemical model of lithium-ion battery for wide frequency range applications. Electrochim. Acta 2020, 343, 136094. [Google Scholar] [CrossRef]
- Nejad, S.; Gladwin, D.; Stone, D. A systematic review of lumped-parameter equivalent circuit models for real-time estimation of lithium-ion battery states. J. Power Sources 2016, 316, 183–196. [Google Scholar] [CrossRef]
- Plett, G.L. Battery Management Systems, Volume I: Battery Modeling; Artech House: Norwood, MA, USA, 2015. [Google Scholar]
- Zhu, Q.; Xiong, N.; Yang, M.-L.; Huang, R.-S.; Hu, G.-D. State of charge estimation for lithium-ion battery based on nonlinear observer: An H∞ method. Energies 2017, 10, 679. [Google Scholar] [CrossRef]
- Yang, H.; Sun, X.; An, Y.; Zhang, X.; Wei, T.; Ma, Y. Online parameters identification and state of charge estimation for lithium-ion capacitor based on improved Cubature Kalman filter. J. Energy Storage 2019, 24, 100810. [Google Scholar] [CrossRef]
- Li, X.; Wang, Z.; Zhang, L. Co-estimation of capacity and state-of-charge for lithium-ion batteries in electric vehicles. Energy 2019, 174, 33–44. [Google Scholar] [CrossRef]
- Xiong, R.; Sun, F.; Chen, Z.; He, H. A data-driven multi-scale extended Kalman filtering based parameter and state estimation approach of lithium-ion polymer battery in electric vehicles. Appl. Energy 2014, 113, 463–476. [Google Scholar] [CrossRef]
- Guo, F.; Hu, G.; Xiang, S.; Zhou, P.; Hong, R.; Xiong, N. A multi-scale parameter adaptive method for state of charge and parameter estimation of lithium-ion batteries using dual Kalman filters. Energy 2019, 178, 79–88. [Google Scholar] [CrossRef]
- Panda, S.; Tripura, T.; Hazra, B. First-order error-adapted eigen perturbation for real-time modal identification of vibrating structures. J. Vib. Acoust. 2021, 143, 051001. [Google Scholar] [CrossRef]
- Bhowmik, B.; Tripura, T.; Hazra, B.; Pakrashi, V. Real time structural modal identification using recursive canonical correlation analysis and application towards online structural damage detection. J. Sound Vib. 2020, 468, 115101. [Google Scholar] [CrossRef]
- Bhowmik, B.; Tripura, T.; Hazra, B.; Pakrashi, V. First-order eigen-perturbation techniques for real-time damage detection of vibrating systems: Theory and applications. Appl. Mech. Rev. 2019, 71, 060801. [Google Scholar] [CrossRef]
- Sun, F.; Hu, X.; Zou, Y.; Li, S. Adaptive unscented Kalman filtering for state of charge estimation of a lithium-ion battery for electric vehicles. Energy 2011, 36, 3531–3540. [Google Scholar] [CrossRef]
- Zhang, S.; Guo, X.; Zhang, X. An improved adaptive unscented Kalman filtering for state of charge online estimation of lithium-ion battery. J. Energy Storage 2020, 32, 101980. [Google Scholar] [CrossRef]
- Havangi, R. Adaptive robust unscented Kalman filter with recursive least square for state of charge estimation of batteries. Electr. Eng. 2022, 104, 1001–1017. [Google Scholar] [CrossRef]
- Liu, Y.; Huangfu, Y.; Xu, J.; Zhao, D.; Xu, L.; Xie, M. State-of-charge co-estimation of Li-ion battery based on on-line adaptive extended Kalman filter carrier tracking algorithm. In Proceedings of the IEEE Industrial Electronics Society, 44nd Annual Conference (IECON 2018), Washington, DC, USA, 21–23 October 2018; pp. 1940–1945. [Google Scholar]
- Xie, S.; Chen, D.; Chu, X.; Liu, C. Identification of ship response model based on improved multi-innovation extended Kalman filter. J. Harbin Eng. Univ. 2018, 39, 282–289. [Google Scholar]
- Liu, Z.; Dang, X.; Jing, B. A novel open circuit voltage based state of charge estimation for lithium-ion battery by multi-innovation Kalman filter. IEEE Access 2019, 7, 49432–49447. [Google Scholar] [CrossRef]
- Panchal, S.; Mathew, M.; Fraser, R.; Fowler, M. Electrochemical thermal modeling and experimental measurements of 18650 cylindrical lithium-ion battery during discharge cycle for an EV. Appl. Therm. Eng. 2018, 135, 123–132. [Google Scholar] [CrossRef]

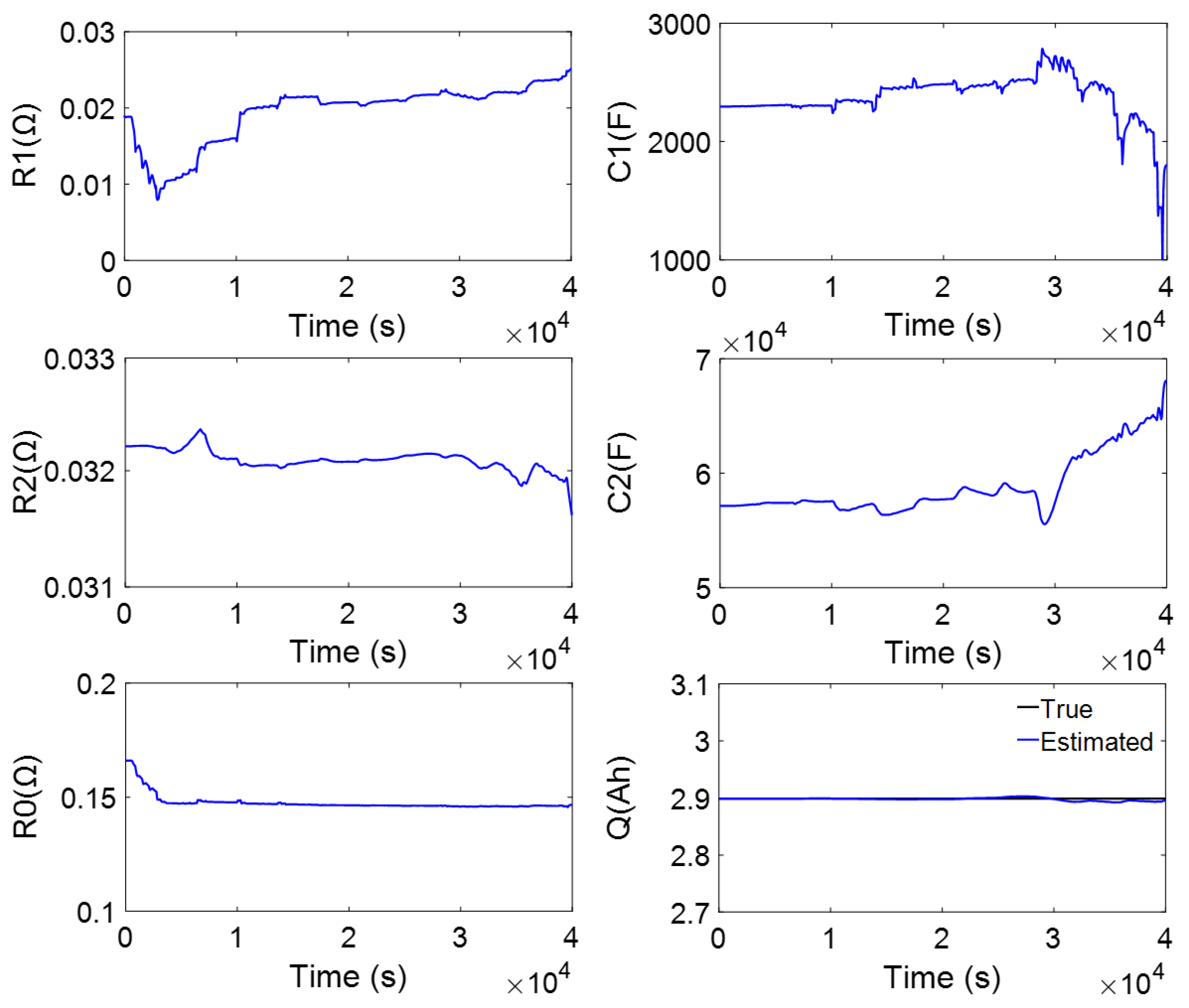


| 0.1660 Ω | 0.0189 Ω | 0.0322 Ω | 2.2948 kF | 57.1452 kF |
| Variance | UDDS | DST | NEDC |
|---|---|---|---|
| EKF-MIARUKF | 0.0019 | 0.0024 | 0.0038 |
| MIARUKF | 0.0065 | 0.0042 | 0.0064 |
| ARUKF | 0.0100 | 0.0059 | 0.0077 |
| RUKF | 0.0109 | 0.0073 | 0.0091 |
| Variance | MRMSE | Relative Error to Nominal |
|---|---|---|
| nominal | 0.0025 | - |
| Case 1 | 0.0023 | 0.08 |
| Case 2 | 0.0028 | 0.12 |
| Case 3 | 0.0028 | 0.12 |
| Variance | MRMSE | Relative Error to Nominal |
|---|---|---|
| nominal | 0.0029 | - |
| Case 1 | 0.0026 | 0.10 |
| Case 2 | 0.0031 | 0.07 |
| Case 3 | 0.0032 | 0.10 |
| Variance | MRMSE | Relative Error to Nominal |
|---|---|---|
| nominal | 0.0040 | - |
| Case 1 | 0.0039 | 0.03 |
| Case 2 | 0.0046 | 0.15 |
| Case 3 | 0.0047 | 0.18 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Kim, G.-W. Improved State-of-Charge Estimation of Lithium-Ion Battery for Electric Vehicles Using Parameter Estimation and Multi-Innovation Adaptive Robust Unscented Kalman Filter. Energies 2024, 17, 272. https://doi.org/10.3390/en17010272
Li C, Kim G-W. Improved State-of-Charge Estimation of Lithium-Ion Battery for Electric Vehicles Using Parameter Estimation and Multi-Innovation Adaptive Robust Unscented Kalman Filter. Energies. 2024; 17(1):272. https://doi.org/10.3390/en17010272
Chicago/Turabian StyleLi, Cheng, and Gi-Woo Kim. 2024. "Improved State-of-Charge Estimation of Lithium-Ion Battery for Electric Vehicles Using Parameter Estimation and Multi-Innovation Adaptive Robust Unscented Kalman Filter" Energies 17, no. 1: 272. https://doi.org/10.3390/en17010272
APA StyleLi, C., & Kim, G.-W. (2024). Improved State-of-Charge Estimation of Lithium-Ion Battery for Electric Vehicles Using Parameter Estimation and Multi-Innovation Adaptive Robust Unscented Kalman Filter. Energies, 17(1), 272. https://doi.org/10.3390/en17010272