
Analysis of the Efficiency of Traction Drive Control Systems of Electric Locomotives with Asynchronous Traction Motors


 ,
, 
Abstract
1. Introduction
- -
- Faster dynamic response;
- -
- Lower torque pulsations.
- -
- The disadvantages of a vector control system include:
- -
- The complexity of the control system;
- -
- Lower energy efficiency at lower motor shaft rotational speeds;
- -
- Simultaneous control of motor torque and magnetic flux;
- -
- A more complex control system architecture.
- -
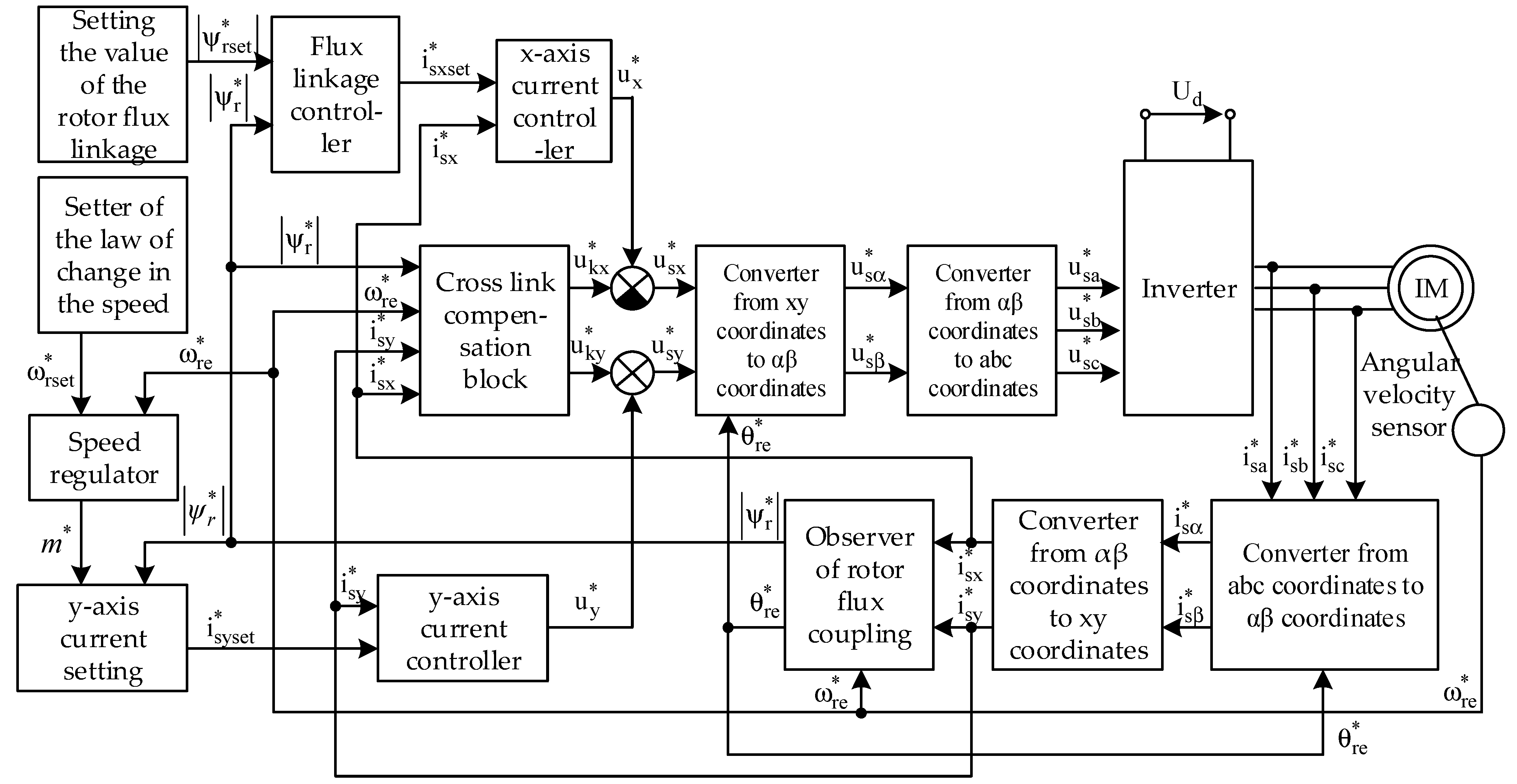
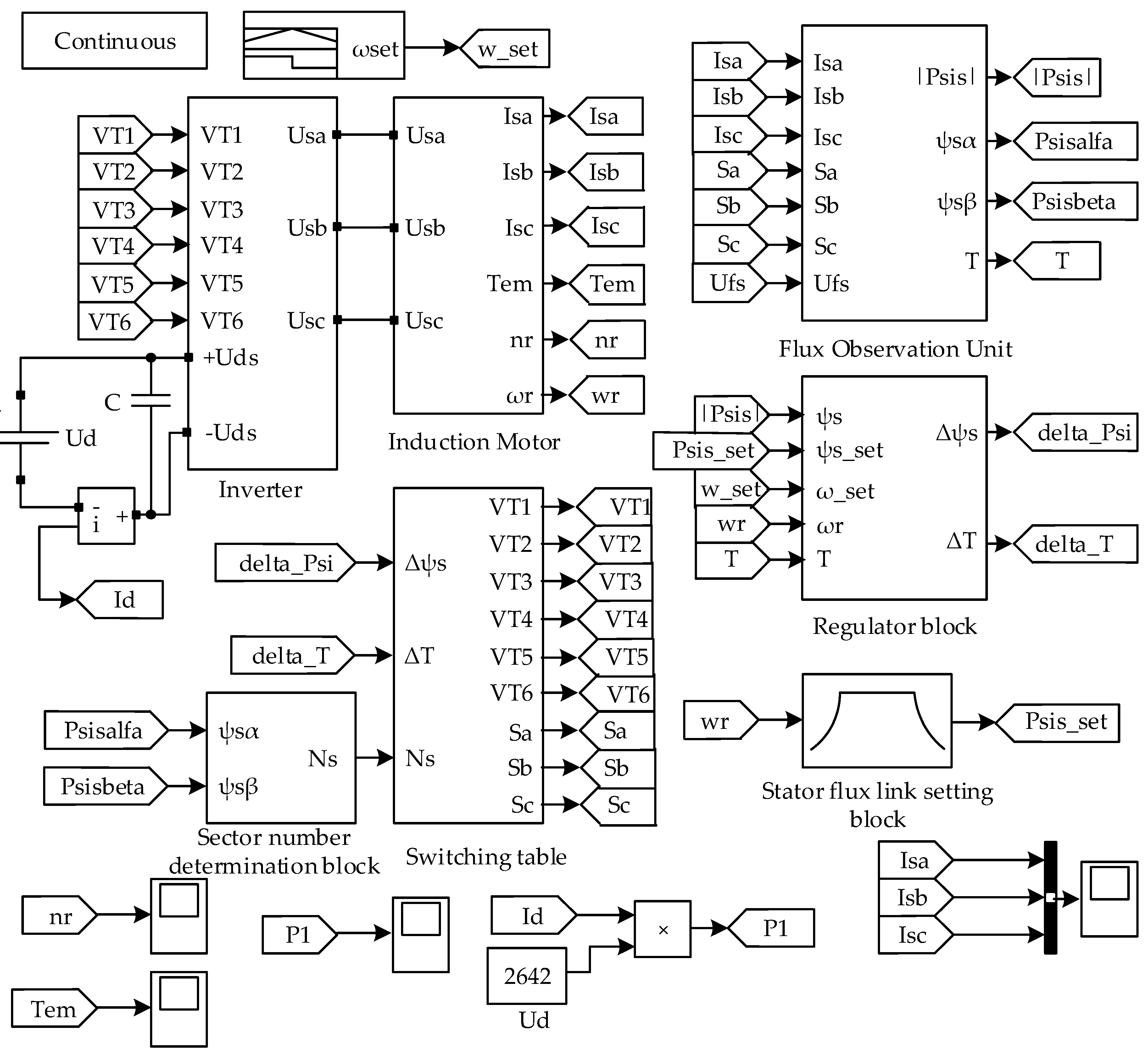
- The operation of the vector control and direct torque control circuits is explained in Section 2;
- -
- In Section 3, the steady state starting characteristics in the absence and presence of disturbances in the inverter power system and torque on the motor shaft were obtained for the vector control and direct torque control schemes through simulation.
- -
- The results obtained are discussed in Section 4.
- -
- The conclusions are presented in Section 5.
2. Materials and Methods
3. Results of the Analysis of the Efficiency of Electric Traction Drive Control Systems for Rolling Stock with Asynchronous Electric Motors
3.1. Rationale for Selecting a Mathematical Model for the Electric Traction Motor
3.2. Adaptation of the Existing Vector Control and Direct Torque Control Models to the Objectives of the Investigations
3.3. Modeling Results
3.3.1. Modeling Results in the Absence of Disturbances
- -
- Starting;
- -
- Development of the nominal value of the angular rotational speed of the electric motor shaft;
- -
- Operation at the nominal angular rotational speed of the electric motor;
- -
- 10% reduction in the nominal value of the angular rotational speed of the electric motor shaft;
- -
- Operation at a reduced angular rotational speed of the electric motor;
- -
- 10% increase in the nominal value of the angular rotational speed of the electric motor shaft;
- -
- Operation at an increased angular rotational speed of the electric motor.
- -
- -
- -
- -
- Power consumption (Figure 9).
3.3.2. Modeling Results in the Presence of Power Supply Disturbances of the Electric Motor
- -
- Starting;
- -
- Development of the nominal value of the angular rotational speed of the electric motor shaft.
- -
- -
- -
- -
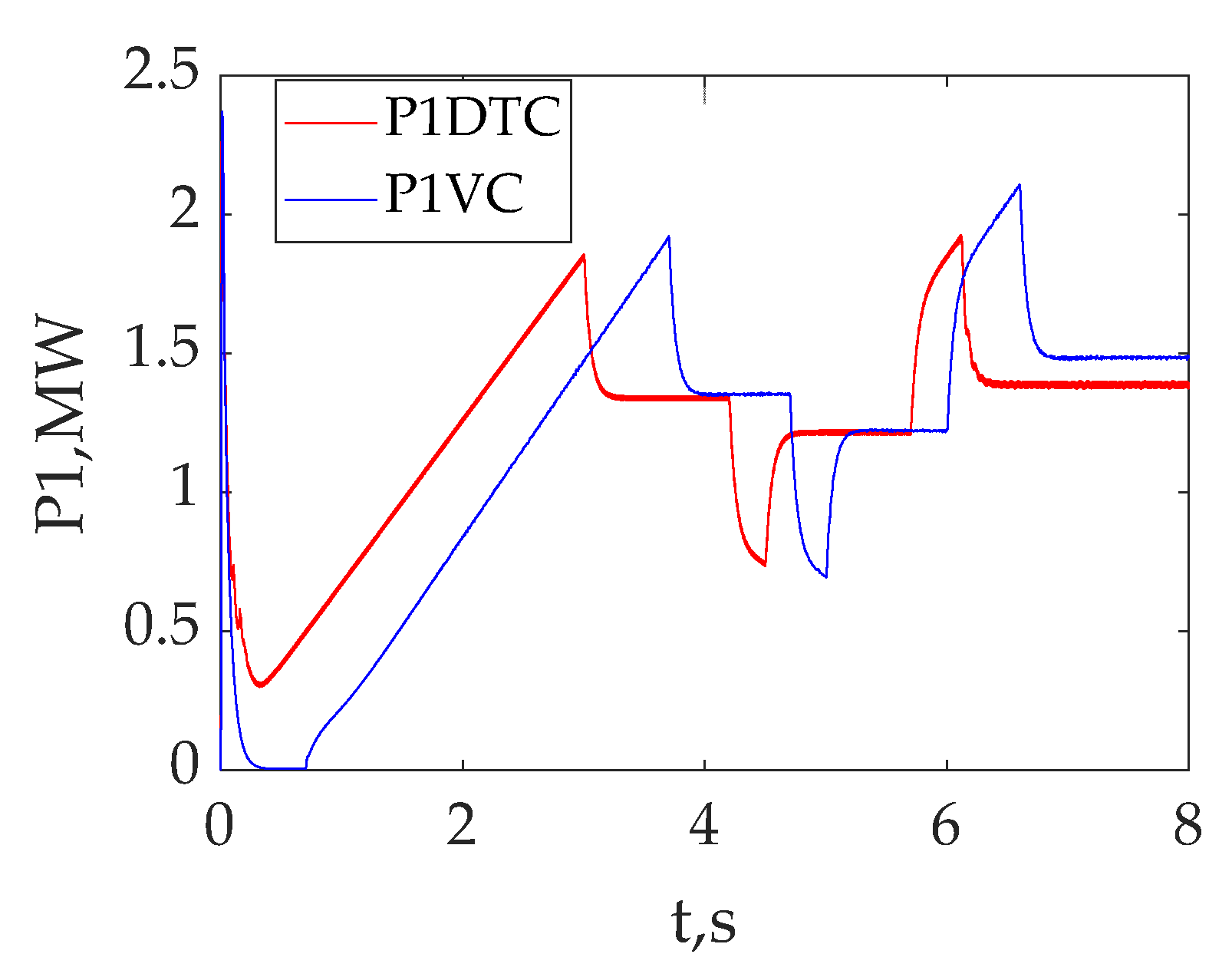
- Power consumption (Figure 15).
3.3.3. Modeling Results in the Presence of Load Disturbances of the Electric Traction Motor
- -
- The amplitude was equal to the nominal value of torque on the motor shaft—10,324 Nm;
- -
- The period was 0.1 s;
- -
- The pulse width was equal to 50% of the period.
- -
- Starting;
- -
- Development of 10% of the nominal value of the angular rotational speed of the electric motor shaft.
- -
- -
- -
- -
- Power consumption (Figure 21).
- -
- Operation at nominal rotational speed of the electric motor shaft;
- -
- At reduced rotational speed;
- -
- At increased rotational speed of the electric motor shaft.
- -
- Development of the nominal rotational speed of the electric motor shaft;
- -
- Transitioning from the nominal rotational speed to a reduced rotational speed of the electric motor shaft;
- -
- Transitioning from a reduced rotational speed to an increased rotational speed of the electric motor shaft.
4. Discussion
- -
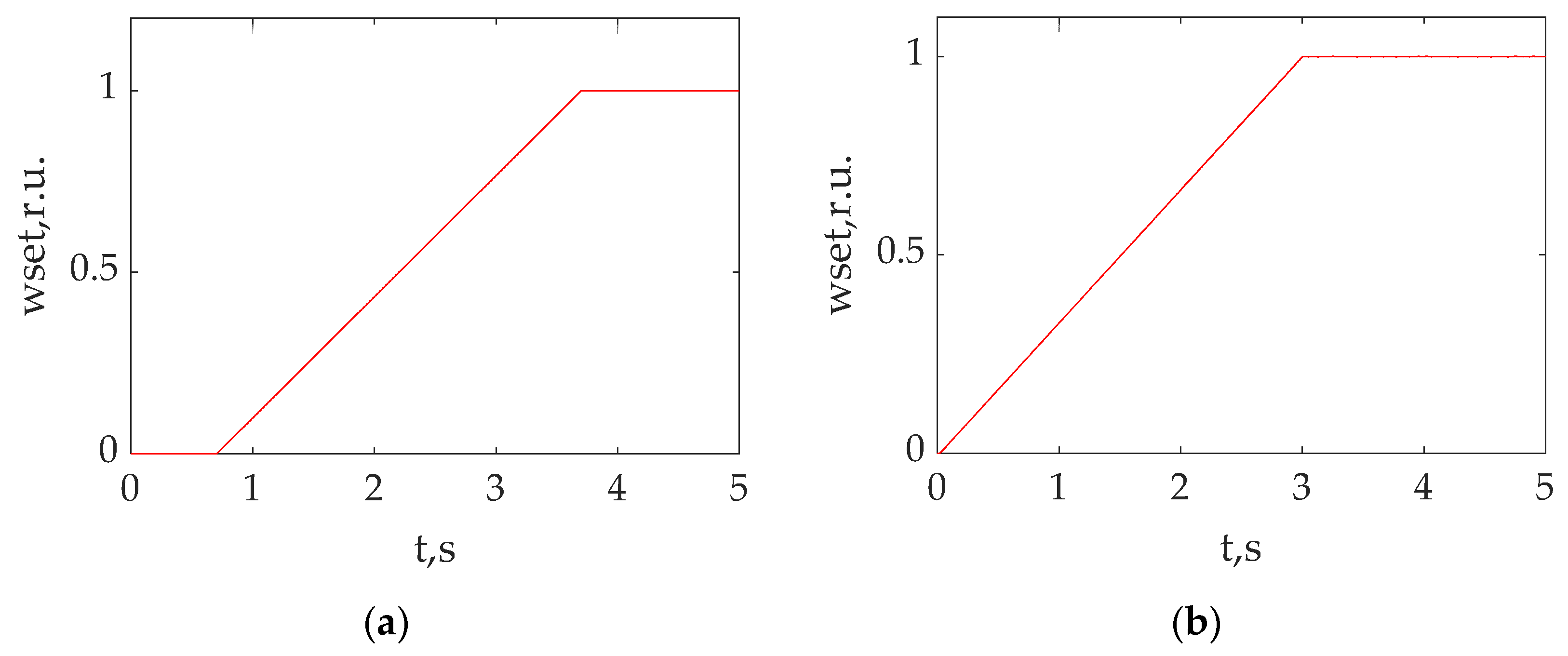
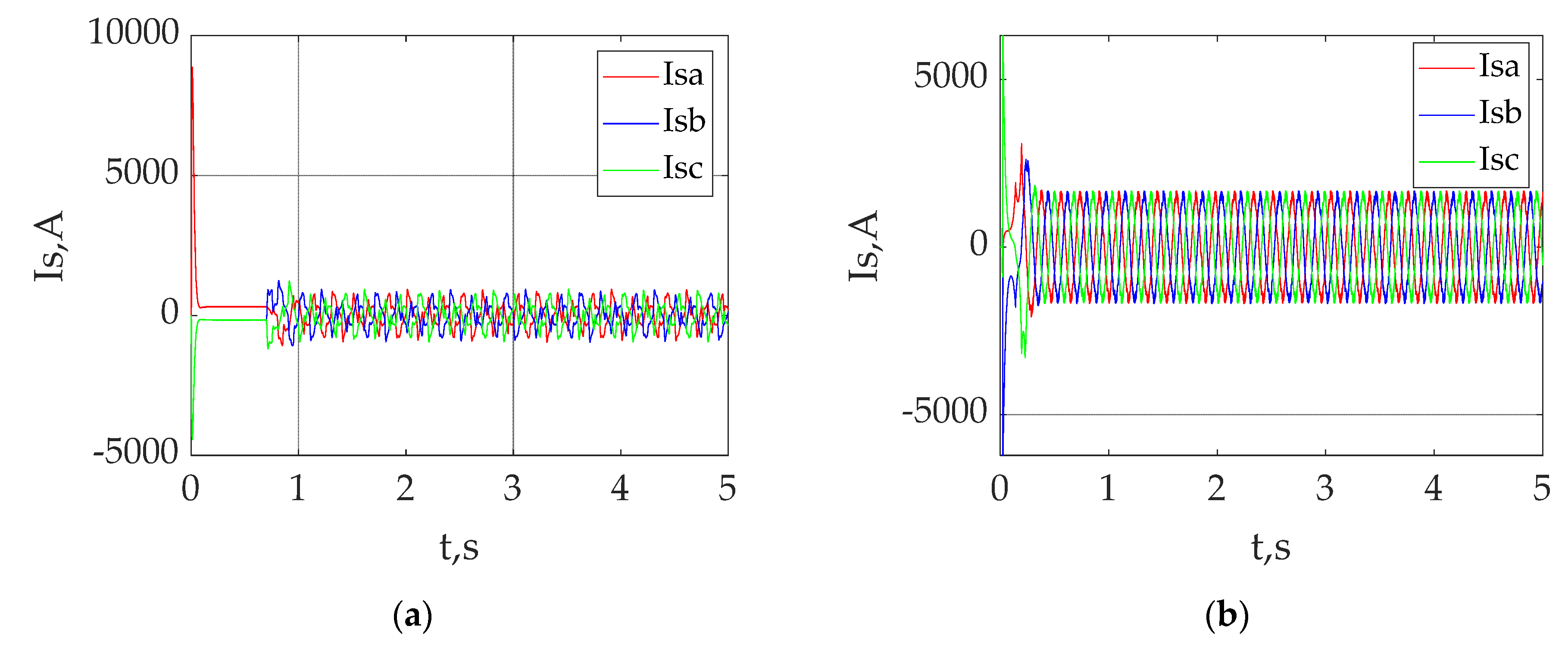
- The phase current frequency is equal to zero at the starting moment and up to the moment of activation in the system with vector control, i.e., during this period, the traction motor acts as an electric direct current (DC) motor. This circumstance could be explained by the fact that the speed intensity setter is deactivated during this period. In the system with direct torque control, there is no time interval during which the asynchronous motor would act as an electric DC machine as, in direct torque control, the intensity setter is activated at the moment of voltage being supplied to the asynchronous motor;
- -
- Within the time interval after the activation of the speed intensity setter and up to the beginning of the nominal mode, as soon as the transient processes (Figure 6a) caused by the activation of the speed setter are complete, the stator phase currents remain constant, although higher than the nominal value. In the system with direct torque control, within the time interval after the activation of the speed intensity setter up to the beginning of the nominal mode, the phase current value is equal to the nominal value (Figure 6b). In the first case, the phase current frequency is equal to f = (ωset·ωrnom·pp)/2π, where ωset—frequency value in the speed intensity output, Ωnom—nominal value of the angular rotational speed of the motor shaft (3), number of pairs (Table 1);
- -
- Within the time interval corresponding to the nominal mode, the value of the stator currents is equal to the nominal value, and the phase current frequencies are also equal to the nominal value in the two control systems (Figure 6a), (Figure 6b). At the same time, the error in the determination of the phase currents, calculated according to Formula (15) on the basis of the data in Table 4, is lower than 1%;
- -
- Within the time interval corresponding to the transition from the nominal frequency to the lower frequency of the rotation of the motor shaft, the value of the stator phase currents is lower than the nominal value in the vector control (Figure 6a), while in the system with direct torque control, the values of the stator phase current are equal to the nominal value (Figure 6b). The frequency of the stator phase currents is equal to f = (ωset·ωrnom·pp)/2π;
- -
- At the beginning of the steady-state mode at a lower rotational speed, the values of the phase currents become equal to the nominal value in the two control systems (Table 4);
- -
- Within the time interval corresponding to the transition from a lower frequency down to the higher rotational speed of the motor shaft, the value of the stator phase currents is higher than the nominal value in the system with vector control (Figure 6a), while in the system with direct torque control, the stator phase current values are equal to the nominal value (Figure 6b). The frequency of the stator phase currents is equal to f = (ωset·ωrnom·pp)/2π;
- -
- At the beginning of the steady-state mode at a higher rotational speed, the values of the phase currents become equal to the nominal value in the two control systems (Table 4).
- -
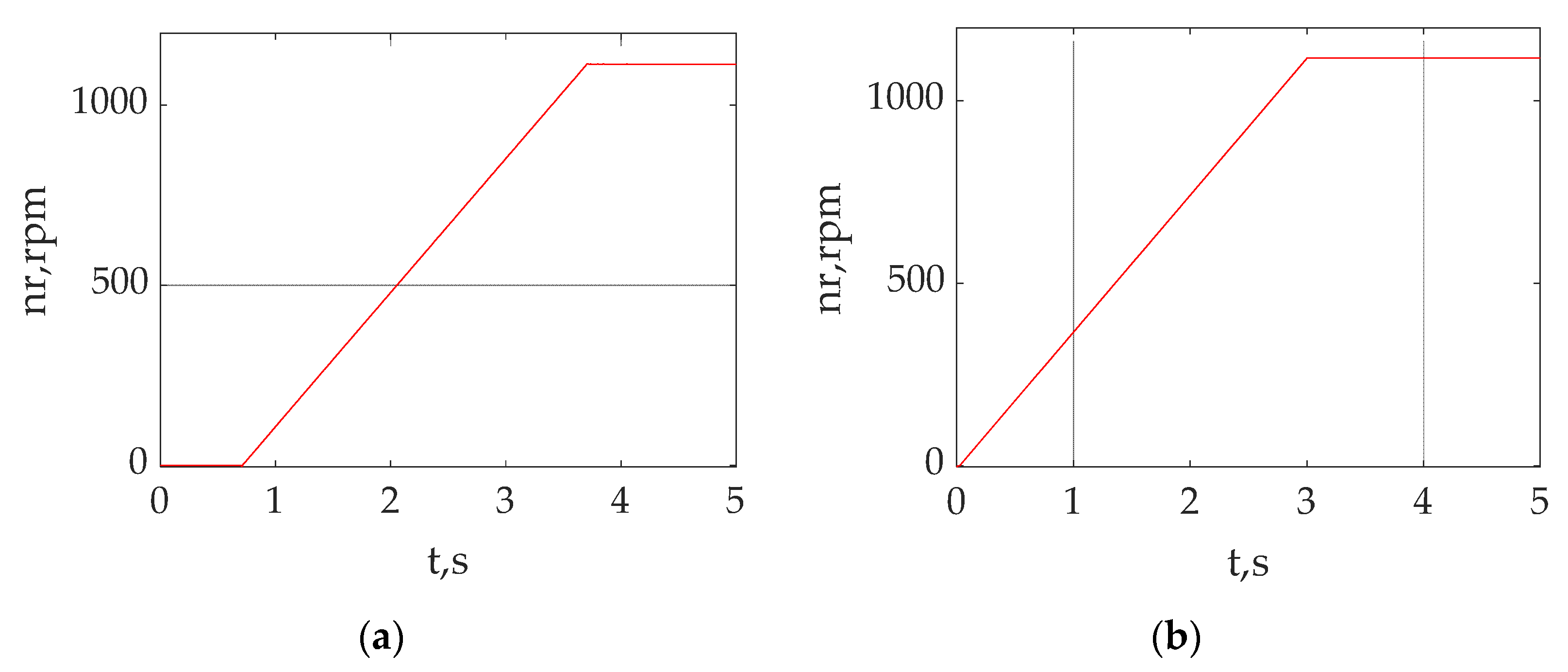
- Within the interval up to the activation of the speed intensity setting in the direct torque control system, the rotational speed of the motor shaft and the torque are equal to zero (Figure 7a), i.e., the motor does not perform effectively within this interval. This interval is absent in the direct torque control system;
- -
- Within the interval corresponding to the nominal operation mode in the vector control system, the error in the determination of the rotational speed was 0.27%, and in the torque system, 1.13% (Table 5). The error in the determination of the rotational speed and torque in the direct torque control system is absent for this interval (Table 5);
- -
- Within the interval, corresponding to operation at a lower frequency in the vector control system, the error in the determination of the rotational speed was 0.3%, and in the torque system, 0.93% (Table 5). The error in the determination of the rotational speed and torque in the direct torque control system is absent for this interval (Table 5);
- -
- Within the interval corresponding to operation at a higher frequency in the vector control system, the error in the determination of the rotational speed was 0.33%, and in the torque system, 1.1% (Table 5). Within this interval, the error in determining the rotational speed in the direct torque control system was 5.68%, and in the torque, without error (Table 5).
- -
- -
- -
- -
- At the start moment and up to the activation in the vector control, the power consumed from the power supply was 5.883 kW and the efficiency was equal to zero (Table 7). This circumstance could be explained by the fact that, within this time period, the electric motor was not performing efficiently and the power consumed from the power supply was spent feeding the magnetic system of the electric motor. This interval is absent in the direct torque control system (Table 7);
- -
- Within the interval corresponding to the nominal operation mode in the vector control system, the power consumed from the power supply was 1352 kW, while the efficiency was 90% (Table 7). In the direct torque control system, the power consumed by the power supply was 1339 kW, and the efficiency was 89.6% for this interval (Table 7). Table 1 provides the traction motor efficiency value for the nominal mode, which is η = 95.5%. The drive efficiency was calculated during the investigations taking into account the losses in the traction motor and inverter. Therefore, the authors consider the obtained result to be correct;
- -
- Within the interval corresponding to operation at a higher frequency in the vector control system, the power consumed from the power supply was 1222 kW, while the efficiency was 89.5% (Table 7). In the direct torque control system, the power consumed from the power supply was 1216 kW and the efficiency was 88.7% for this interval (Table 7);
- -
- Within the interval corresponding to operation at a higher frequency in the vector control system, the power consumed from the power supply was 1489 kW, while the efficiency was 89.9% (Table 7). In the direct torque control system, the power consumed from the power supply was 1387 kW, and the efficiency was 89.8% for this interval (Table 7).
- The models of electric traction drives with vector and direct torque control do not account for the thermal processes that occur in the electric traction drive. Thermal processes lead to thermal noise, which affects the correct operation of both control systems.
- Due to the lack of research-based-knowledge of the nature of the load variation during a single wheel pair slippage attempt and the lack of experimental data, the load variation for this mode was set as a sequence of rectangular pulses.
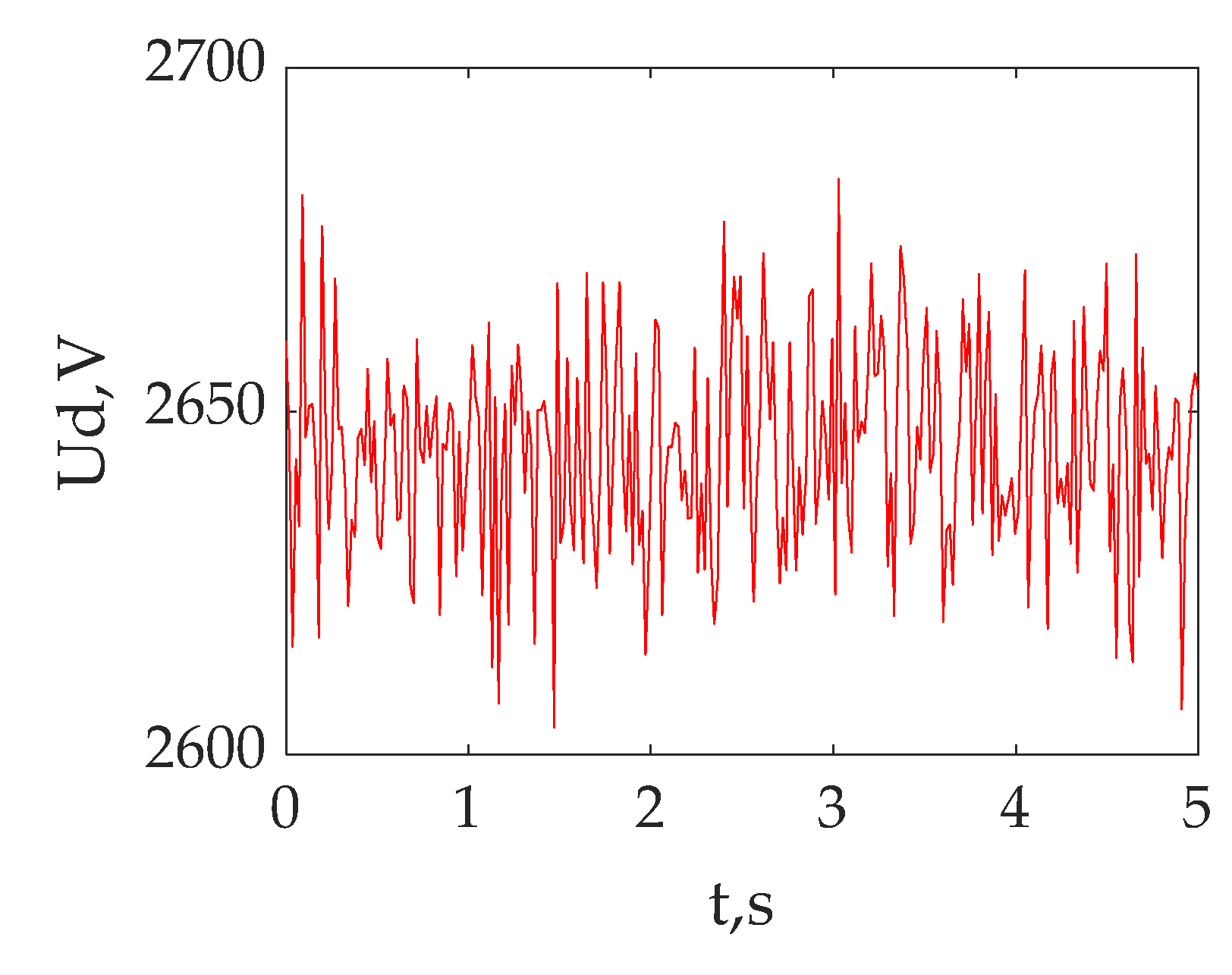
- Due to the lack of research-based-knowledge of the nature of the DC-link voltage variation caused by the operating factors and a lack of experimental data, the voltage variation at the inverter input was taken into account by means of a Gaussian noise source.
- Given that the weight of the locomotive and the weight of the train would result in a tenfold increase in the moment of inertia of the electric motor shaft, which in turn would result in significant amounts of calculation, it was assumed that the moment of inertia and load torque on the motor shaft were nominal. Although the character of the starting characteristics would not be affected by this factor, the transient time would be reduced.
5. Conclusions
- The choice of a mathematical model of the electric traction motor was substantiated. It enables investigating the operation of an electric motor in the presence of asymmetric modes caused by transient processes in the traction electric drive.
- The simulation models of the vector-controlled and direct-torque-controlled traction drives were adapted for the investigations accounting for the nature of substantiated operation of the electric rolling stock.
- The starting characteristics for the electric traction drive with vector and direct torque control were obtained in the absence of voltage and torque disturbances and in the presence of voltage disturbance and torque disturbance.
- The following has been determined:
- -
- At lower than nominal frequencies, the traction drive with direct torque control demonstrates a higher accuracy of the regulation of the rotational speed and torque, lower power consumption from the power supply, lower torque overshooting, but a higher level of torque pulsations than the traction drive with vector control;
- -
- At higher than nominal frequencies, vector control demonstrates a higher accuracy of the regulation of the speed, lower torque overshooting, shorter duration of transient processes, and lower torque pulsations than the direct torque control.
- The presence of power supply disturbances was found to cause stator phase current unbalance, which is absent in the direct torque control.
- In the presence of torque disturbances, the speed instability coefficient was found to be higher in the vector control than in the direct torque control; moreover, in this mode, the stator phase current unbalance is present.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Moaveni, B.; Rashidi Fathabadi, F.; Molavi, A. Fuzzy control system design for wheel slip prevention and tracking of desired speed profile in electric trains. Asian J. Control 2022, 24, 388–400. [Google Scholar] [CrossRef]
- Raluca-Cristina, N.; Ion, V.; Marian-Ştefan, N.; Sorin, E. Investigation of Idle Running and Short-Circuit Performance Improvement for an Asynchronous Traction Motor. In Proceedings of the 2019 International Conference on Electromechanical and Energy Systems (SIELMEN), Craiova, Romania, 9–11 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Enache, S.; Vlad, I.; Enache, M.A. Aspects Regarding the Optimization of Cross Geometry in Traction Asynchronous Motors Using the Theory of Nonlinear Circuits. Energies 2022, 15, 6648. [Google Scholar] [CrossRef]
- Costa, C.A.; Nied, A.; Nogueira, F.G.; de Azambuja Turqueti, M.; Rossa, A.J.; Dezuo, T.J.M.; Barra, W. Robust Linear Parameter Varying Scalar Control Applied in High Performance Induction Motor Drives. IEEE Trans. Ind. Electron. 2020, 68, 10558–10568. [Google Scholar] [CrossRef]
- Hannan, M.A.; Ali, J.A.; Mohamed, A.; Hussain, A. Optimization techniques to enhance the performance of induction motor drives: A review. Renew. Sustain. Energy Rev. 2018, 81, 1611–1626. [Google Scholar] [CrossRef]
- Demircioglu, I.; Poyrazoglu, G. Induction motor Simulink implementation of the rotor flux oriented direct vector control method for electric vehicles. In Proceedings of the 2021 17th Conference on Electrical Machines, Drives and Power Systems (ELMA), Sofia, Bulgaria, 1–4 July 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Raveendra, M.; Aswini, M. Speed Control of Induction Motors using PI Controllers. Int. J. Sci. Eng. Technol. Res. 2018, 7, 0361–0364. Available online: http://ijsetr.com/uploads/325614IJSETR16563-68.pdf (accessed on 15 December 2022).
- Raveendra, M.; Mounika, B. Speed Control of an Induction Motor using Fuzzy Logic Controller. Int. J. Sci. Eng. Technol. Res. 2018, 7, 0357–0360. Available online: http://ijsetr.com/uploads/254361IJSETR16562-67.pdf (accessed on 15 December 2022).
- Gundogdu, A.; Celikel, R.; Dandil, B.; Ata, F. FPGA in-the-loop implementation of direct torque control for induction motor. Automatika 2021, 62, 275–283. [Google Scholar] [CrossRef]
- Ferestade, I.; Ahmadian, M.; Molatefi, H.; Moaveni, B.; Bokaeian, V. Integrated sliding mode and direct torque controls for improving transient traction in high-speed trains. J. Vib. Control. 2021, 27, 629–650. [Google Scholar] [CrossRef]
- Bermúdez Guzmán, M.; Barrero, F.; Martín Torres, C.; Perales Esteve, M.Á. Performance Analysis of Direct Torque Controllers in Five-Phase Electrical Drives. Appl. Sci. 2021, 11, 11964. [Google Scholar] [CrossRef]
- Aktas, M.; Awaili, K.; Ehsani, M.; Arisoy, A. Direct torque control versus indirect field-oriented control of induction motors for electric vehicle applications. Eng. Sci. Technol. Int. J. 2020, 23, 1134–1143. [Google Scholar] [CrossRef]
- Karlovsky, P.; Lettl, J. Induction motor drive direct torque control and predictive torque control comparison based on switching pattern analysis. Energies 2018, 11, 1793. [Google Scholar] [CrossRef]
- Goolak, S.; Tkachenko, V.; Šťastniak, P.; Sapronova, S.; Liubarskyi, B. Analysis of Control Methods for the Traction Drive of an Alternating Current Electric Locomotive. Symmetry 2022, 14, 150. [Google Scholar] [CrossRef]
- Elgbaily, M.; Anayi, F.; Alshbib, M.M. A combined control scheme of direct torque control and field-oriented control algorithms for three-phase induction motor: Experimental validation. Mathematics 2022, 10, 3842. [Google Scholar] [CrossRef]
- Al-Mamoori, D.H.; Al-Tameemi, Z.H.; Jumaa, F.A.; Neda, O.M.; Al-Ghanimi, M.G. A Comparative Study of DTC-SVM and FOC-SVM Control Techniques of Induction Motor Drive. J. Eng. Appl. Sci. 2019, 14, 2135–2140. [Google Scholar] [CrossRef]
- Goolak, S.; Tkachenko, V.; Sapronova, S.; Lukoševičius, V.; Keršys, R.; Makaras, R.; Keršys, A.; Liubarskyi, B. Synthesis of the Current Controller of the Vector Control System for Asynchronous Traction Drive of Electric Locomotives. Energies 2022, 15, 2374. [Google Scholar] [CrossRef]
- Berdiev, U.; Burkhankhodzhaev, A.; Tuychieva, M.; Iksar, E.; Usmonov, K. Investigation of energy indicators with asymmetry of the voltage of the power source of mainline electric locomotives of alternating current. In Proceedings of the AIP Conference Proceedings, Volzhsky, Russia, 13–17 September 2021; AIP Publishing LLC: Melville, NY, USA, 2023; Volume 2552, p. 030018. [Google Scholar] [CrossRef]
- Ronanki, D. Overview of Rolling Stock. In Transportation Electrification: Breakthroughs in Electrified Vehicles, Aircraft, Rolling Stock, and Watercraft; Wiley-IEEE Press: New York, NY, USA, 2022; pp. 249–281. [Google Scholar] [CrossRef]
- Shavkun, V.; Pavlenko, T.; Kozlova, O. Development of Algorithmic Models for Research of Reliability Parameters of Trolleybus Traction Electric Motors in the Operation Process. EUREKA Phys. Eng. 2020, 1, 39–46. [Google Scholar] [CrossRef]
- Fedele, E.; Iannuzzi, D.; Del Pizzo, A. Onboard energy storage in rail transport: Review of real applications and techno-economic assessments. IET Electr. Syst. Transp. 2021, 11, 279–309. [Google Scholar] [CrossRef]
- Omelianenko, H.V.; Overianova, L.V.; Maslii, A.S. Geometric and electrophysical parameters of armature winding of electromechanical converter of inertial energy storage for suburban trains. Electr. Eng. Electromech. 2020, 1, 65–71. [Google Scholar] [CrossRef]
- Kobenkins, G.; Marinbahs, M.; Bizans, A.; Rilevs, N.; Burenin, V.; Sliskis, O. Carrying out of Strength Control of Mutual Loaded Traction Geared Motor Boxes as a Part of Industrial Tests. In Proceedings of the 2022 9th International Conference on Electrical and Electronics Engineering (ICEEE), Alanya, Turkey, 29–31 March 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 185–189. [Google Scholar] [CrossRef]
- Riabov, I.; Kondratieva, L.; Overianova, L.; Goolak, S. Assessment of the On-Board Energy Storage Parameters of the Locomotive for Rail Quarry Transport. In TRANSBALTICA XIII: Transportation Science and Technology, Proceedings of the 13th International Conference TRANSBALTICA, Vilnius, Lithuania, 15–16 September 2022; Springer International Publishing: Midtown Manhattan, NY, USA, 2023; pp. 677–688. [Google Scholar] [CrossRef]
- Riabov, I.; Liubarskyi, B.; Overianova, L.; Goolak, S.; Kondratieva, L. Mathematical Model of the Electric Traction System of Quarry Railway Transport. In Proceedings of the 26th International Scientific Conference “Transport Means”, Kaunas, Lithuania, 5–7 October 2022; pp. 330–335. [Google Scholar] [CrossRef]
- Gorobchenko, O.; Nevedrov, O. Development of the structure of an intelligent locomotive DSS and assessment of its effectiveness. Arch. Transp. 2020, 56, 47–58. [Google Scholar] [CrossRef]
- Goolak, S.; Tkachenko, V.; Bureika, G.; Vaičiūnas, G. Method of spectral analysis of traction current of AC electric locomotives. Transport 2020, 35, 658–668. [Google Scholar] [CrossRef]
- Goolak, S.; Liubarskyi, B.; Sapronova, S.; Tkachenko, V.; Riabov, I. Determination of the Power Factor of Electric Rolling Stock of Alternating Current Consumption. In TRANSBALTICA XII: Transportation Science and Technology, Proceedings of the 12th International Conference TRANSBALTICA, Vilnius, Lithuania, 16–17 September 2021; Springer International Publishing: Midtown Manhattan, NY, USA, 2022; pp. 243–252. [Google Scholar] [CrossRef]
- Moore, T.; Schmid, F.; Tricoli, P. Voltage transient management for Alternating Current trains with vacuum circuit breakers. IET Electr. Syst. Transp. 2022, 12, 12034. [Google Scholar] [CrossRef]
- Gorobchenko, O.; Tkachenko, V. Statistical analysis of locomotives traction motors performance. MATEC Web Conf. 2019, 287, 04002. [Google Scholar] [CrossRef]
- Gorobchenko, O.; Fomin, O.; Fomin, V.; Kovalenko, V. Study of the influence of electric transmission parameters on the efficiency of freight rolling stock of direct current. East.-Eur. J. Enterp. Technol. 2018, 1, 60–67. [Google Scholar] [CrossRef]
- Lovskaya, A. Assessment of dynamic efforts to bodies of wagons at transportation with railway ferries. East.-Eur. J. Enterp. Technol. 2014, 3, 36–41. [Google Scholar] [CrossRef]
- Panchenko, S.; Gerlici, J.; Vatulia, G.; Lovska, A.; Pavliuchenkov, M.; Kravchenko, K. The Analysis of the Loading and the Strength of the FLAT RACK Removable Module with Viscoelastic Bonds in the Fittings. Appl. Sci. 2023, 13, 79. [Google Scholar] [CrossRef]
- Panchenko, S.; Vatulia, G.; Lovska, A.; Ravlyuk, V.; Elyazov, I.; Huseynov, I. Influence of structural solutions of an improved brake cylinder of a freight car of railway transport on its load in operation. EUREKA Phys. Eng. 2022, 6, 45–55. [Google Scholar] [CrossRef]
- Kalivoda, J.; Neduzha, L. Running Dynamics of Rail Vehicles. Energies 2022, 15, 5843. [Google Scholar] [CrossRef]
- Liu, B.; Bruni, S. Influence of individual wheel profiles on the assessment of running dynamics of a rail vehicle by numerical simulation: A case study. Veh. Syst. Dyn. 2022, 60, 2393–2412. [Google Scholar] [CrossRef]
- Klepikov, V.; Semikov, O. Modeling The Dynamic Processes of The Electric Drive of Electric Vehicle While Wheels are Slipping. In Proceedings of the 2020 IEEE Problems of Automated Electrodrive. Theory and Practice (PAEP), Kremenchuk, Ukraine, 21–25 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Goolak, S.; Liubarskyi, B.; Sapronova, S.; Tkachenko, V.; Riabov, I.; Glebova, M. Improving a Model of the Induction Traction Motor Operation Involving Non-Symmetric Stator Windings. East.-Eur. J. Enterp. Technol. 2021, 4, 45–58. [Google Scholar] [CrossRef]
- Goolak, S.; Kyrychenko, M. Thermal Model of the Output Traction Converter of an Electric Locomotive with Induction Motors. Probl. Energeticii Reg. 2022, 3, 1–16. [Google Scholar] [CrossRef]
- Goolak, S.; Riabov, I.; Tkachenko, V.; Yeritsyan, B. The Determination of Power Losses in the Traction Electric Drive Converter of the Electric Locomotive. In Proceedings of the 26th International Scientific Conference “Transport Means”, Kaunas, Lithuania, 5–7 October 2022; pp. 487–492. [Google Scholar] [CrossRef]
- Goolak, S.; Liubarskyi, B.; Sapronova, S.; Tkachenko, V.; Riabov, I. Refined Model of Asynchronous Traction Electric Motor of Electric Locomotive. In Proceedings of the 25th International Scientific Conference “Transport Means”, Kaunas, Lithuania, 4–6 October 2021; pp. 455–460. [Google Scholar]
- Gubarevych, O.; Golubieva, S.; Melkonova, I. Comparison of the results of simulation modeling of an asynchronous electric motor with the calculated electrodynamic and energy characteristics. Przegląd Elektrotechniczny 2022, 98, 61–66. [Google Scholar] [CrossRef]
- Goolak, S.; Riabov, I.; Gorobchenko, O.; Yurchenko, V.; Nezlina, O. Improvement of the model of an asynchronous traction motor of an electric locomotive by taking into account power losses. Prz. Elektrotechnicznythis 2022, 98, 1–10. [Google Scholar] [CrossRef]
- Moulahoum, S.; Baghli, L.; Rezzoug, A.; Touhami, O. Sensorless Vector Control of a Saturated Induction Machine accounting for iron loss. Eur. J. Electr. Eng. EJEE Lavoisier 2008, 11, 511–543. [Google Scholar] [CrossRef]
- Fathy Abouzeid, A.; Guerrero, J.M.; Endemaño, A.; Muniategui, I.; Ortega, D.; Larrazabal, I.; Briz, F. Control strategies for induction motors in railway traction applications. Energies 2020, 13, 700. [Google Scholar] [CrossRef]
- Wang, B.; Chen, S.; Li, M. Research and application of traction converter for electric locomotive in heavy haul railway. In Proceedings of the 2022 IEEE 5th International Conference on Automation, Electronics and Electrical Engineering (AUTEEE), Shenyang, China, 18–20 November 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 598–602. [Google Scholar] [CrossRef]
- Kumar, G.A.; Shankar, S.; Murthy, K. Design and control of autonomous hybrid wind solar system with DFIG supplying three-phase four-wire loads. Int. J. Renew. Energy Technol. 2021, 12, 269–299. [Google Scholar] [CrossRef]
- Bassey, O.; Chen, C.; Butler-Purry, K.L. Linear power flow formulations and optimal operation of three-phase autonomous droop-controlled Microgrids. Electr. Power Syst. Res. 2021, 196, 107231. [Google Scholar] [CrossRef]
- Ramu, S.K.; Irudayaraj, G.C.R.; Subramani, S.; Subramaniam, U. Broken rotor bar fault detection using Hilbert transform and neural networks applied to direct torque control of induction motor drive. IET Power Electron. 2020, 13, 3328–3338. [Google Scholar] [CrossRef]
- Mahfoud, S.; Derouich, A.; Iqbal, A.; El Ouanjli, N. ANT-colony optimization-direct torque control for a doubly fed induction motor: An experimental validation. Energy Rep. 2022, 8, 81–98. [Google Scholar] [CrossRef]
- Goolak, S.; Gubarevych, O.; Gorobchenko, O.; Nevedrov, O.; Kamchatna-Stepanova, K. Investigation of the influence of the quality of the power supply system on the characteristics of an asynchronous motor with a squirrel-cage rotor. Prz. Elektrotechnicznythis 2022, 98, 142–148. [Google Scholar] [CrossRef]
- Goolak, S.; Gerlici, J.; Gubarevych, O.; Lack, T.; Pustovetov, M. Imitation Modeling of an Inter-Turn Short Circuit of an Asynchronous Motor Stator Winding for Diagnostics of Auxiliary Electric Drives of Transport Infrastructure. Commun.-Sci. Lett. Univ. Zilina 2021, 23, C65–C74. [Google Scholar] [CrossRef]
- Gubarevych, O.; Goolak, S.; Daki, O.; Tryshyn, V. Investigation of Turn-To-Turn Closures of Stator Windings to Improve the Diagnostics System for Induction Motors. Probl. Energeticii Reg. 2021, 2, 10–24. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Power P, kW. | 1200 |
| Phase-to-phase RMS voltage Unom, V | 1870 |
| RMS value Inom, A | 450 |
| Nominal frequency of supply voltage fnom, Hz | 55.8 |
| Number of phases n, pcs. | 3 |
| Number of pole pairs pp | 3 |
| Nominal rotational speed nrnom, rpm | 1110 |
| Efficiency η,% | 95.5 |
| Power factor cosφ, per unit | 0.88 |
| Active resistance of the stator winding rs, Ω | 0.0226 |
| Active resistance of the rotor winding reduced to the stator winding r′r, Ohm | 0.0261 |
| Stator winding leakage inductance Lσs, Hn | 0.00065 |
| Rotor winding leakage inductance reduced to the stator winding, L′σr, Hn | 0.00045 |
| Total magnetizing circuit inductance LμN | 0.0194336 |
| Moment of inertia of the motor J, kg·m2 | 73 |
| Parameter | Value |
|---|---|
| Instantaneous value of phase voltage Unom, B | 1527 |
| Instantaneous value of nominal phase voltage Inom, A | 450 |
| IGBT module type: 5SNA1200G450350 | |
| Number of IGBT modules Nmodule, units | 6 |
| Parameter | Value |
|---|---|
| Collector-emitter voltage VCES (VGE = 0 V), V | 4500 |
| DC collector current IC (Tc = 85 °C), A | 1200 |
| Peak collector current ICM (tp = 1 ms, Tc = 85 °C), A | 2400 |
| Gate-emitter voltage VGES, V | VGESmax = 20 |
| VGESmin = 20 | |
| Total power dissipation Ptot (Tc = 25 °C, per switch (IGBT), W | 10,500 |
| DC forward current IF, A | 1200 |
| Peak forward current IFRM, A | 2400 |
| Surge current IFSM (VR = 0 V, Tvj = 125 °C, tp = 10 ms, half-sinewave), A | 9000 |
| Isolation voltage Visol (1 min, f = 50 Hz), V | 10,200 |
| Transistor | |
| Collector (-emitter) breakdown voltage V(BR)CES (VGE = 0 V, IC = 0 mA, Tvj = 25 °C), V | 4500 |
| Collector-emitter saturation voltage VCEsat (IC = 1200 A, VGE = 15 V), V | 2.9(Tvj = 25 °C) |
| 3.9(Tvj = 125 °C) | |
| Gate leakage current IGES (VCE = 0 V, VGE = ±20 V, Tvj = 125 °C), nA | IGESmax = 500 |
| IGESmin = −500 | |
| Collector cut-off current ICES (VCE = 4500 V, VGE = 0 V), mA | 12(Tvj = 25 °C) |
| 120(Tvj = 125 °C) | |
| Gate-emitter threshold voltage VGE(TO) (IC = 240 mA, VCE = VGE, Tvj = 25 °C), V | VGE(TO)max = 6.5 |
| VGE(TO)min = 4.5 | |
| Input capacitance Cies (VCE = 25 V, VGE = 0 V, f = 1 MHz, Tvj = 25 °C), nF | 120 |
| Output capacitance Coes (VCE = 25 V, VGE = 0 V, f = 1 MHz, Tvj = 25 °C), nF | 6.02 |
| Reverse transfer capacitance Cres (VCE = 25 V, VGE = 0 V, f = 1 MHz, Tvj = 25 °C), nF | 2.58 |
| Internal gate resistance RGint, Ω | 1.2 |
| Module stray inductance LσCE, nH | 18 |
| Resistance, terminal-chip RCC’+EE’, mΩ | 0.07(Tvj = 25 °C) |
| 0.1(Tvj = 125 °C) | |
| Diode | |
| Forward voltage UF (IF = 1200 A), V | 3.7(Tvj = 25 °C) |
| 4.0(Tvj = 125 °C) | |
| Reverse recovery current Irr (VCC = 2800 V, IF = 1200 A, VGE = ±15 V, RG = 1.5 Ω, CGE = 220 nF, Ls = 150 nH inductive load), A | 1460(Tvj = 25 °C) |
| 1600(Tvj = 125 °C) | |
| Parameter | Control System | |||||||
|---|---|---|---|---|---|---|---|---|
| Vector | Direct Torque Control | |||||||
| Time Intervals, s | ||||||||
| 0–0.7 | 3.7–4.7 | 5.0–6.0 | 6.6–8 | 3.0–4.2 | 4.5–5.7 | 6.3–8.0 | ||
| Instantaneous value of the first harmonic of the stator phase current Is(1), A | Isa(1) | 317.4 | 635.6 | 631 | 622.2 | 636 | 634.5 | 638.8 |
| Isb(1) | −158.7 | 635.6 | 630 | 622.2 | 636 | 634.5 | 638.8 | |
| Isc(1) | −158.7 | 635.6 | 630 | 622.2 | 636 | 634.5 | 638.8 | |
| Parameter | Set Value | Control System | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Vector | Direct Torque Control | ||||||||||||||
| Time Intervals, s | |||||||||||||||
| 0–0.7 | 3.7–4.7 | 5.0–6.0 | 6.6–8 | 3.0–4.2 | 4.5–5.7 | 6.3–8.0 | |||||||||
| Value | Error δ, % | Value | Error δ, % | Value | Error δ, % | Value | Error δ, % | Value | Error δ, % | Value | Error δ, % | Value | Error δ, % | ||
| Rotational speed of the drive shaft nr, rpm | 1110 | 0 | - | 1113 | 0.27 | 1002 | 0.3 | 1225 | 0.33 | 1110 | 0 | 998.7 | 0 | 1151.7 | 5.68 |
| Average torque value Tav, N·m | 10,324 | 0 | - | 10,441 | 1.13 | 10,421 | 0.93 | 10,438 | 1.1 | 10,324 | 0 | 10,324 | 0 | 10,324 | 0 |
| Parameter | Control System | ||||||
|---|---|---|---|---|---|---|---|
| Vector | Direct Torque Control | ||||||
| Time Intervals, s | |||||||
| 0–0.7 | 3.7–4.7 | 5.0–6.0 | 6.6–8 | 3.0–4.2 | 4.5–5.7 | 6.3–8.0 | |
| Maximum torque value Tmax, N·m | 0 | 11,580 | 11,320 | 11,530 | 12,309 | 11,595 | 15,224 |
| Minimum torque value Tmin, N·m | 0 | 9302 | 9522 | 9346 | 8339 | 9053 | 5424 |
| Average torque value Tav, N·m | 0 | 10,441 | 10,421 | 10,438 | 10,324 | 10,324 | 10,324 |
| Torque pulsation factor kpT, % | 0 | 10.82 | 8.62 | 10.46 | 19.23 | 12.31 | 47.46 |
| Parameter | Control System | ||||||
|---|---|---|---|---|---|---|---|
| Vector | Direct Torque Control | ||||||
| Time Intervals, s | |||||||
| 0–0.7 | 3.7–4.7 | 5.0–6.0 | 6.6–8 | 3.0–4.2 | 4.5–5.7 | 6.3–8.0 | |
| Power consumption P1s.s., kW | 5.883 | 1352 | 1222 | 1489 | 1339 | 1216 | 1387 |
| Efficiency, % | 0 | 90 | 89.5 | 89.9 | 89.6 | 88.7 | 89.8 |
| Parameter | Control system | |||||
|---|---|---|---|---|---|---|
| Vector | Direct Torque Control | |||||
| Time Intervals, s | ||||||
| 3.65–4.0 | 4.5–5.7 | 6.6–6.8 | 3.0–3.2 | 4.5–4.7 | 6.3–6.5 | |
| Transient process time ttp, s | 0.115 | 0.111 | 0.115 | 0.115 | 0.111 | 0.137 |
| Maximum peak torque value Tpmax, N·m | 10,010 | 11,570 | 10,110 | 11,570 | 11,000 | 16,770 |
| Minimum peak torque value, Tpmax, N·m | 8802 | 10,550 | 9568 | 7914 | 10,530 | 5668 |
| Average peak torque value, Tavmax, N·m | 9406 | 11,060 | 9839 | 9742 | 10,765 | 11,219 |
| Torque overshoot σT, % | 9.91 | 10.61 | 6.09 | 5.64 | 4.27 | 8.67 |
| Parameter | Control System | ||
|---|---|---|---|
| Vector | Direct Torque Control | ||
| Time Interval, s | |||
| 0–0.7 | 3.7–5.0 | 3.0–5.0 | |
| Instantaneous value of the first harmonic of the stator phase current Is(1), A | IsA = 314.8 | IsA = 702.0 | IsA = 636.36 |
| IsB = −152.8 | IsB = 704.3 | IsB = 636.515 | |
| IsC = −152.8 | IsC = 703.6 | IsC = 636.412 | |
| Rotational speed of the drive shaft nr, rpm | 0 | 1114 | 1110.2 |
| Maximum torque value Tmax, N·m | 0 | 11,910 | 12,420 |
| Minimum torque value Tmin, N·m | 0 | 9344 | 8252 |
| Average torque value Tav, N·m | 0 | 10,627 | 10,336 |
| Power consumption P1, kW | 5438 | 1382 | 1343 |
| Torque pulsation factor kpT, % | 0 | 12.07 | 20.16 |
| Stator phase current unbalance factor kimbI, % | 0 | 0.33 | 0.02 |
| Parameter | Control System | ||
|---|---|---|---|
| Vector | Direct Torque Control | ||
| Time Interval | |||
| 0–0.7 | 3.7–5.0 | 3.7–5.0 | |
| Instantaneous value of the first harmonic of the stator phase current Is(1), A | IsA = 307.3 | IsA = 925.7 | IsA = 1676 |
| IsB = −159.8 | IsB = 921.7 | IsB = 1676 | |
| IsC = −159.8 | IsC = 923.6 | IsC = 1676 | |
| Maximum rotational speed of the motor shaft nrmax, rpm | 0 | 112.2 | 112.4 |
| Minimum rotational speed of the motor shaft nrmin, rpm | 0 | 107.4 | 111.7 |
| Average value of rotational speed of the motor shaft nrav, rpm | 0 | 109.8 | 111.0 |
| Maximum torque value Tmax, N·m | 0 | 10,810 | 10,340 |
| Minimum torque value Tmin, N·m | 0 | 0 | 0 |
| Maximum power consumption P1rmax, kW | 5.915 | 138.2 | 240.1 |
| Minimum power consumption P1rmin, kW | 5.915 | 52.42 | 136.7 |
| Speed instability coefficient kn.st.nr, % | 0 | 2.19 | 0.63 |
| Stator phase current unbalance factor kimbI, % | 0 | 0.23 | 0 |
| Comparison Results | Control System | |
|---|---|---|
| Vector | Direct Torque Control | |
| Nominal Mode | ||
| Advantages | Lower value of the pulsation coefficient Higher efficiency value | Higher torque control accuracy Higher speed control accuracy Lower power consumption |
| Disadvantages | Lower torque control accuracy Lower speed control accuracy Greater power consumption | Higher value of the pulsation coefficient Lower efficiency value |
| Reduced Speed | ||
| Advantages | Lower value of the pulsation coefficient Higher efficiency value | Higher torque control accuracy Higher speed control accuracy Lower power consumption |
| Disadvantages | Lower torque control accuracy Lower speed control accuracy Greater power consumption | Higher value of the pulsation coefficient Lower efficiency value |
| Increased Speed | ||
| Advantages | Lower value of the pulsation coefficient Higher speed control accuracy | Higher torque control accuracy Lower power consumption |
| Disadvantages | Lower torque control accuracy Greater power consumption | Higher value of the pulsation coefficient Lower speed control accuracy |
| Comparison Results | Control System | |
|---|---|---|
| Vector | Direct Torque Control | |
| Nominal Mode | ||
| Advantages | – | Lower value of overshooting |
| Disadvantages | Higher value of overshooting | – |
| Reduced speed | ||
| Advantages | – | Lower value of overshooting |
| Disadvantages | Higher value of overshooting | – |
| Increased speed | ||
| Advantages | Lower value of overshootingShorter duration of transient processes | – |
| Disadvantages | – | Higher value of overshootingLonger duration of transient processes |
| Comparison Results | Control System | |
|---|---|---|
| Vector | Direct Torque Control | |
| Power Supply Disturbance | ||
| Advantages | Lower value of the torque pulsation coefficient | Higher torque control accuracy Higher speed control accuracy Lower power consumption value Lower value of phase current unbalance factor |
| Disadvantages | Lower torque control accuracy Lower speed control accuracy Higher power consumption value Higher value of phase current unbalance factor | Higher value of the torque pulsation coefficient |
| Load disturbance | ||
| Advantages | Lower power consumption value | Lower value of speed instability coefficient Lower value of phase current unbalance factor |
| Disadvantages | Higher value of speed instability coefficient Higher value of phase current unbalance factor | Higher power consumption value |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Goolak, S.; Liubarskyi, B.; Riabov, I.; Lukoševičius, V.; Keršys, A.; Kilikevičius, S. Analysis of the Efficiency of Traction Drive Control Systems of Electric Locomotives with Asynchronous Traction Motors. Energies 2023, 16, 3689. https://doi.org/10.3390/en16093689
Goolak S, Liubarskyi B, Riabov I, Lukoševičius V, Keršys A, Kilikevičius S. Analysis of the Efficiency of Traction Drive Control Systems of Electric Locomotives with Asynchronous Traction Motors. Energies. 2023; 16(9):3689. https://doi.org/10.3390/en16093689
Chicago/Turabian StyleGoolak, Sergey, Borys Liubarskyi, Ievgen Riabov, Vaidas Lukoševičius, Artūras Keršys, and Sigitas Kilikevičius. 2023. "Analysis of the Efficiency of Traction Drive Control Systems of Electric Locomotives with Asynchronous Traction Motors" Energies 16, no. 9: 3689. https://doi.org/10.3390/en16093689
APA StyleGoolak, S., Liubarskyi, B., Riabov, I., Lukoševičius, V., Keršys, A., & Kilikevičius, S. (2023). Analysis of the Efficiency of Traction Drive Control Systems of Electric Locomotives with Asynchronous Traction Motors. Energies, 16(9), 3689. https://doi.org/10.3390/en16093689