1. Introduction
Automobiles have evolved as a primary mode of transportation and have become an essential requirement for every family. These vehicles majorly operate on fossil fuels for their propulsion and are one of the significant contributors to Greenhouse Gas (GHG) emissions worldwide [
1]. Their absolute necessity and environmental concern have compelled the scientific community to consider alternative fuels and automobile structures for a cost-effective, efficient, and green transportation system [
2].
Electric vehicles are the most efficient alternative to conventional fossil fuel-based automobiles as they provide efficient performance with the indemnity of cost-effectiveness and environmental safety [
3]. The research and development and popularization of various electric vehicles (EVs) are rising worldwide, intending to conserve energy and lower consumption, as well as alleviate the problem of environmental pollution.
Hybrid electric vehicles (HEVs) have been adopted widely in recent years as they offer enormous benefits from the traditional internal combustion engine (ICE) vehicles and can compete with EVs. The adaptation of consumers to hybrid electric vehicles is straightforward as the interface and working of the HEV are much similar to traditional vehicles, and the user is not compelled to adopt something entirely new. This easy adaptability of HEVs makes it easier for customers to shift to buying these vehicles. Moreover, the HEV offers enormous environmental benefits, including less dependence on fossil fuels and very low carbon emissions [
4]. The HEVs have lifetime emissions, usually 25 to 30% less than conventional ICE cars [
5], whereas the fuel consumption in HEVs is almost 30% less than the traditional vehicles as they can restore energy during braking through a regenerative braking mechanism [
6]. This regenerative braking mechanism in the HEVs can save around 70% of the kinetic energy which otherwise is wasted [
7]. Similarly, HEVs have better dynamic performance and acceleration experience as they have battery power assistance. HEVs, with the overall benefits of better fuel efficiency, higher performance, and lesser carbon footprint, encourage consumers to adopt this promising technology.
With the maturation of fuel cell (FC) technology, the application of FCs in automobiles has piqued the interest of businesses and academics [
8]. The latest literature discusses the adaptation and benefits of FC electric vehicles (FCEVs) in detail [
9]. Besides the benefits of FCEVs, fuel cell hybrid electric vehicles (FCHEVs) are one of the most promising future vehicles [
10]. The system offers the benefits of reduced waste and low energy consumption due to the direct conversion of fuel into electrical energy by the FCHEV and the utilization of multiple energy resources [
11].
The EV industry has developed exponentially as these vehicles provide economic viability, green propulsion, and greater performance flexibility. The sales of electric vehicles worldwide are increasing exponentially. This industry has been booming, especially in the past decade, as global EV sales hit a record 6.9 million in 2021, more than a 101% increase from the past year [
12].
Figure 1 depicts global EV sales until 2021. Among the EV’s market, China is leading the globe with more than 50% sales of around 3.5 million EVs in China, while Europe, with 2.3 million EV sales, is the second largest EV market.
Considering increased sales and public interest in EVs, significant research and development institutes and educational institutions are creating cutting-edge technologies to improve EVs’ performance, durability, and cost-effectiveness. The expected EV sales in the global automobile market will increase by more than 45% in the upcoming decades, as shown in
Figure 2. With so much economic impact, business potential, and environmental benefits, there is an extensive need to further develop this technology through continuous innovation and research [
13].
Alongside the exponential growth of the global EV market and the goal of developing green transportation sources, researchers are developing innovative EV types that operate on different energy resources to further enhance the global EV footprint. In this regard, fuel cell electric vehicles (FCEVs) are emerging as a strong candidate in recent years.
Figure 3 presents the predicted FCEV market trend [
14].
The FCEV operates on the same principle as other EV types, with a significant difference in the working principle of the power cell, as the FCEV is powered through a fuel cell with or without the combination of any external energy source. Meanwhile, only water and heat are discharged with electrical energy generation, making it one of the cleanest and most energy-efficient power sources for EVs.
FCHEVs with Proton Exchange Membrane Fuel Cells (PEMFCs) can work with no charging constraint while having a more extended driving range than battery electric vehicles (BEVs) and plug-in hybrid electric vehicles (PHEVs) [
15]. A PEMFC benefits from being clean and ecologically benign and having a rapid start-up and refilling time [
16]. A PEMFC, on the other hand, is unable to recover the electric energy of motor brake feedback due to its relatively soft output profile and limited dynamic response capabilities. As the FCs have slower dynamics, their response to rapid acceleration and deceleration is inadequate, and its effect on the FC lifespan is also detrimental [
17]. As a result, super capacitors or batteries are required as an energy storage technology for balancing energy, providing rapid energy demands, and storing excess energy available during regenerating braking and excess power generation by the FCs [
18]. Compared to most traditional power systems, batteries and supercapacitors regulate energy to flow better and are typically advantageous in increasing vehicle efficiency [
19]. However, proper resource management in FCHEVs is critical to achieving optimal performance and system efficiency.
Furthermore, fuel cells are commonly employed in hybrid power systems that combine multiple energy sources. It can help to minimize hydrogen consumption, lower the size of fuel cells, and improve the economics of hybrid power systems. FC-based hybrid systems are commonly employed in transportation equipment such as unmanned aerial vehicles (UAVs), trams, and FC hybrid automobiles. This fact demonstrates that hydrogen energy is becoming increasingly significant in transportation. As a result, it is critical to focus on developing innovative and affective EMSs for optimal FCHEV performance.
EMSs are crucial to the performance and efficiency of any hybrid electric vehicle [
20]. Their primary purpose, particularly in FCHEVs, is to distribute power between different energy sources while achieving primary objectives: first, decreasing hydrogen use or limiting equivalent energy consumption and, second, prolonging fuel cell life, which also implies boosting the hybrid system’s economics [
21]. These two optimizations’ aims are essential to various energy management systems.
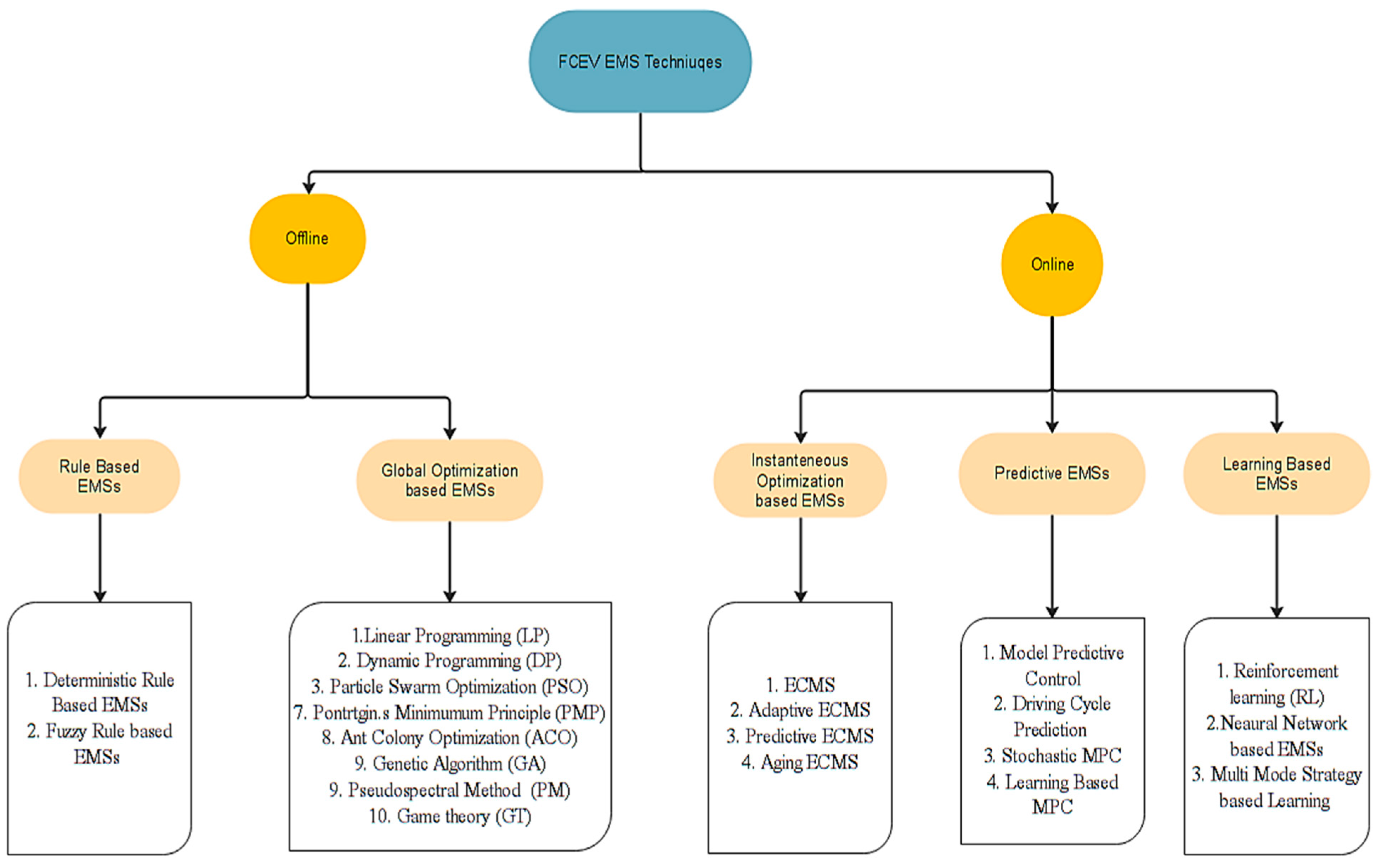
Several different types of EMS techniques for the performance enhancement of FCHEVs can be mainly categorized into two major types. The first category contains the offline EMS techniques in which the system design objectives are primarily achieved through rule-based approaches. The rule-based technique is the offline EMS that is most widely discussed in the literature. This technique necessitates collecting the fuel cell’s power map to determine the most efficient operating range. According to the power system status, it may also modify the power distribution of the fuel cell and the energy storage system (battery or supercapacitor). However, it has several drawbacks, including parameters impacted by the test operating settings, a lack of flexibility for diverse operating conditions, and suboptimal control outcomes [
22].
Moreover, the offline EMS techniques are not applicable in real-time as they require prior information about the entire driving cycle. The computational complexity of finding optimal solutions through these techniques is also high [
23]. Offline EMSs also include global optimization-based EMS techniques with the primary objective of an optimal power split among the onboard energy resources. Rule-based EMS techniques often integrate with these optimization techniques to further enhance their capabilities.
Online EMS techniques, on the other hand, consist of instantaneous optimization as well as predictive and learning-based EMS techniques. The online EMS techniques are more favorable for real-time optimum energy management as they can deliver optimum performance without prior information about the driving cycles [
24]. Model predictive Control (MPC) is among the most researched of predictive online EMS techniques, while learning-based EMSs are also becoming popular. The primary concept of a learning-based online EMS is to leverage massive data sets of real-time and historical information to train the strategy’s parameters to achieve optimal control [
25]. Regardless of the energy management technique used, optimization consists of two objectives: optimizing energy consumption through optimal resource management and prolonging the life of fuel cells and other components.
The dynamic nature of energy demand and supply are well incorporated by the EMS techniques through optimal load current distribution among the available energy resources. The load current is distributed among the energy resources in accordance with the power and energy densities. If the system has two energy resources such as FC and battery, then the FC handles the normal load current requirements while the battery compensates for the dynamic current requirements. Moreover, if the designed FCHEV has three energy resources in the form of FC, battery, and supercapacitor (SC), then the FC considers the slower dynamical load current requirements while the battery and SC handle the medium-range and transient load current requirements, respectively. The performance of FCEVs can be optimized by integrating the system with the more reliable, fast, and efficient EMS techniques.
This research work is intended to first elaborate on the latest topologies of FCEVs in the literature, as they can have different types of energy sources, degrees of hybridization, and other topologies related to their design and operation. All kinds of FCEVs, especially the FCHEV with multiple energy resources, depend highly on efficient and intelligent EMSs for optimal performance. This research presents the latest EMS techniques available in the literature to enhance the FCHEV performance and provides an overview of their effect on FCHEV performance and overall reliability. This study can be considered a research direction for researchers to study the latest literature and choose the best-suited FCEV topology and EMS techniques. The research contributions and novelties of this research work are highlighted below.
Provides a state-of-the-art understanding of the FCHEVs infrastructure and their topologies.
Discusses the latest EMS techniques presented in the recent research publication and critically analyzes their functionality and their pros and cons related to their contributions towards optimum resource management.
Provides an in-depth review of the latest research contributions in the domain of EMS implementation in FCHEVs and elaborates on the challenges associated with their practical implementation.
Discusses the most critical issues and challenges in the globalization of FCHEVs and proposes their adequate solutions.
Section 2 elaborates on the latest FCEV configurations in the literature and provides their advantages and disadvantages.
Section 3 provides a state-of-the-art review of the EMSs adopted in the newest literature and elaborates on them by dividing them into two broad categories regarding their offline and online utilization status. It also provides inside knowledge of offline EMSs and elaborates on their working principles.
Section 4 highlights the online EMSs adopted in the literature, explains their functionality and performance, and highlights the advantages and superiority of one over the other.
Section 5 presents the challenges and issues associated with FCHEV globalization, and
Section 6 provides a conclusion and recommendation to enhance the FCHEV’s performance and commercialization.
2. FCEV Configurations and Power Train Topologies
Fuel cells are frequently combined with various auxiliary energy sources to power hybrid electric vehicles. Supercapacitors (SCs), batteries, solar PV (SPVs), superconducting magnetic energy storage (SMES), and flywheels are examples of supplementary power sources. Batteries and SCs are the most often employed supplementary energy sources. Batteries are simple to install, need little upkeep, and are inexpensive. As a result, fuel cell/battery hybrid electric cars are extensively produced and the most popular topology. An SC is a storage device used to improve dynamic responsiveness. When the load fluctuates rapidly, it can deliver load or recover energy immediately. Other supplementary energy storage devices are used less frequently than batteries and SCs.
Other energy resources are also affective in delivering the required energy potential but have some shortcomings. SMESs are energy storage devices with high power output but poor energy density. Solar PV is a nonpolluting, sustainable power-generating technology; however, its energy generation is unpredictable due to solar irradiation. Mechanical energy is stored in the flywheel when torque is applied to it. When the system requires more power, the flywheel may convert mechanical energy into electrical energy and supply it to the system. It requires strict security and is widely used in electric systems.
Regarding energy resources, the FCEV can be considered to have six types: FC only, FC-Battery, FC-SC, FC-Battery-SC, FC-SC-Battery-PV, and FC-Other. All of these energy resources are of different types and require the integration of power converters for integration with the overall system structure. The pictorial representation of these FCEV configurations is presented in
Figure 4.
The first topology, as shown in
Figure 4a, depicts that only a single power source in the form of FCs drives the EV. The connection of the FC with the DC-DC boost converter and inverter stabilizes the DC output from the FC and converts the DC power into AC for the electric motor. This simple configuration has the advantage of more straightforward implementation and is commonly favorable under low-speed requirements. However, any transient load fluctuations can affect the FC lifespan, and the kinetic energy during braking also goes to waste.
Topology
Figure 4b considered in this research consists of the FC and SC energy resources. Here, the integration of SC benefits in handling the transient load fluctuations and enables the system to restore kinetic energy during braking through the bi-directional converter. Similarly, Topology
Figure 4c depicts battery utilization along with the FC. This topology can deliver a more extended driving range because of the battery’s high energy density and can also handle the regenerative braking phenomenon.
Topology
Figure 4d comprises three energy resources where the battery and SC are integrated with the FC to further enhance the system design efficiency. This configuration has faster system design dynamics because of the SC while having a higher range because of high battery energy density. This topology is also favored for the electrifications and energy management of aircrafts as well as offering numerous design benefits [
26]. This system prioritizes the energy restored from the regenerative braking in recharging the battery and SC according to the system requirements and conditions.
Figure 4e presents the topology of integrating solar PV with the other available energy resources. The purpose of solar PV integration is to recharge the auxiliary energy resources during the daytime operation of the FCHEV. This configuration can further enhance the driving range of the vehicle and can deliver more efficient overall system performance.
The first configuration is of FC only, with only a single power source. The FC is connected with the DC-DC boost converter to stabilize the output, as it does not support any reverse flow of current. This output is then connected to a DC-AC inverter to convert the DC power generated from the FC to the AC to operate the power train AC electric motor. The second configuration contains the FC with SC to support the transient power requirements and to store the excess energy through the bi-directional converter. The third configuration consists of an FC with a battery. The battery is connected to a DC-DC bi-directional converter to provide energy during demand and to restore it during deceleration. The battery delivers moderate instant power requirements and prolongs the FC lifespan.
The fourth configuration consists of the FC-SC-Battery configuration. This configuration has the advantage that the FC handles the regular load demand. The battery takes up the moderate load current while the SC delivers the transient load current during the running and startup conditions. These energy resources complement each other under current conditions and deliver better financial and performance results than the previous configurations through the utilization of EMS techniques.
The fifth configuration involves the addition of solar panels along with other energy resources. Solar panels can provide energy during daytime to recharge the battery and SC and can affect the fuel efficiency and reliability of the EV.
Table 1 highlights the significant constituents, merits, and demerits of each FCEV HPS configuration
The FC’s green energy provides a competitive perspective on the vehicle market, functioning as an adequate substitute for internal combustion (IC) engines [
31]. BEVs now have lower manufacturing costs than FCEVs in both the small and intermediate classes in the green energy category [
32]. As a result, the light-duty and heavy-duty vehicle market for fuel cell electric vehicles look to become very promising by 2030, accounting for half of the current competitive categories [
33].
Recently, different vehicle manufacturers have developed automobiles based on this FCEV technology. The USA is the largest consumer of FCEVs as there are around 15,000 in California State where there is the largest hydrogen fueling station network. Europe and Asia Pacific are the other two big FCEV markets rising exponentially. China is the largest market share for FCEVs in the Asia Pacific region, while South Korea has the second largest market share, as shown in
Figure 5.
The competitive market trend from the recent past has motivated several manufacturers to develop their vehicles with this technology, and Toyota leads the others in this domain.
Table 2 presents the FCEVs developed by different manufactures, their specifications, and the overall system design summary. It can be seen that no manufacturer has considered SC as the energy source, and there is a potential for integration of SC with the FC and battery to enhance the FCEV performance and fuel efficiency further.
Durability and affordability are the primary obstacles that vehicle industry developers confront when enhancing FCEVs and growing worldwide sales volumes [
42]. When more than one energy source is examined, the primary difficulties impeding global manufacture and development of this technology are a lack of effective control and energy management systems. The appropriate power distribution across energy resources, carefully considering the capabilities and limits of each energy source, can significantly increase the durability and viability of such technology. Optimal EMS approaches may ensure optimal system performance and, as a result, deliver the FCEV revolution to the market much sooner than envisaged.
The following study covers the most recent EMS techniques examined in the literature to improve FCEV performance, dependability, and durability.
4. Online EMS
Online EMSs are driven by local optimization and can be used in real-time control. Among these strategies, instantaneous optimization EMSs can reduce immediate fuel usage at each instant without previous information of the entire driving cycle and only produce local optimum results. EMSs that apply immediate optimization include the robust control (RC) equivalent consumption minimization strategy (ECMS) and the adaptive ECMS (A-ECMS). Other online EMS techniques include predictive EMS techniques such as Model Predictive Control (MPC), stochastic MPC, and learning-based MPC. At the same time, other online EMS techniques may include the machine-learning techniques such as supervised and unsupervised learning and reinforcement learning approaches. Learning-based EMSs primarily use training data to update system configurations to enhance flexibility in changing driving situations.
Online energy management techniques provide local optimization without requiring prior knowledge about the driving conditions and behaviors. The real-time implementation of the online EMSs comes with the drawback of utilizing more computational power than the offline EMSs. Moreover, the mathematical calculations involved in their computation are also more complex than the offline EMSs. However, the optimization results under online EMSs are considered more realistic and are more likely to be practically implementable. Online EMSs can be categorized into three primary forms such as instantaneous, predictive, and learning-based EMSs.
4.1. Instantaneous Optimization-Based EMSs
Instantaneous EMS techniques perform resource management for each energy source at each instant. They perform the optimal load distribution and other deliverables without prior knowledge of the driving cycle and have the advantage of being robust and practically feasible. These instantaneous EMSs involve adaptive and nonadaptive EMS techniques: namely, the equivalent energy consumption minimization strategy (ECMS) and adaptive ECMS. The fuel efficiency and overall system performance under instantaneous EMS techniques are generally higher than the rule-based EMSs, but with the limitation that these EMSs can only provide local optimum results.
ECMS is a global optimization technique that considers the minimization of instantaneous fuel consumption by the FCHEV at each instant. It minimizes fuel consumption by adjusting a factor known as the equivalent factor (EF) [
91]. This EF is the relation between the power consumption by the auxiliary energy resources, either battery, SC, or both, in the form of equivalent hydrogen fuel consumption and the primary power demand. The EF in most of the research works is found through an iterative process, as the performance of the ECMS EMS is mainly dependent upon the value of it. Optimal EF will result in near-optimal resource distribution and fuel consumption minimization. Equation (2) represents the main relationship of the ECMS for FCHEVs.
Here, represents the combined hydrogen consumption and is the hydrogen consumption by the FC. and are the equivalent hydrogen consumption considered for the battery and SC, whereas and represent the penalty coefficients for battery and SC, respectively.
The adaptive ECMS is closely related to the conventional ECMS with the addition that the utilization of some adaptive controls tunes the EF under this configuration. The optimal tuning of the EF can provide optimal hydrogen fuel consumption while considering the correct auxiliary energy sources SOC, real-time prediction of the power train, and the driving cycle while keeping the SOC under some predefined limits. Adaptive ECMS has better overall performance and is more reliable than nonadaptive ECMS. Different adaptive controls, such as adaptive PI, are integrated with the ECMS to enhance the ECMS performance. A predictive ECMS is also present in some latest research work that works by adjusting the EF through some predictive approach. In this approach, the first step involves calculating demanded power according to the predicted velocity over the prediction horizon. The EF is then adjusted through adaptive laws for optimal power resource management.
Table 9 summarizes the latest research on ECMSs, adaptive, predictive, and other improvements of ECMS-based EMSs.
4.2. Predictive EMS Techniques
The predictive EMS techniques utilize the previous and currently available data to perform optimal demand power distribution among the energy resources. They usually predict the future output response by examining and manipulating the available information and require prior driving cycle information for optimal performance. The more accurate the provided driving cycle information, the more optimal the resource management they would provide. Many factors, such as driving behavior, traffic, and vehicle conditions, affect the accuracy of the predicted cycle. Therefore, the performance of the predictive EMS techniques is highly dependent upon the prediction accuracy. As a result, additional surrounding information must be successfully evaluated to increase prediction accuracy. The ideal control input is obtained by reducing performance indices such as hydrogen fuel consumption and the additional source’s SOC maintenance over a specific time horizon and adapting effectively to changing driving circumstances. As a result, researchers are increasingly using predictive EMSs to achieve the system design objectives in FCHEVs. Equation (3) represents the optimal cost function for the FCHEV with FC, battery, and SC as three energy resources. This cost function tends to be minimized under some predefined constraints, as presented in Equation (4). Equation (5) shows the
where
represents the initial SOC of the energy resources.
Here, represents the prediction horizon related to hydrogen fuel consumption, is the control input vector, represents the penalty factor integrated with the SOC, is the current simulation time, and are the sizes of the prediction horizon and controller time step, respectively, and represent motor torque and speed, respectively, and are battery and SC currents. and represent the FC power and the SOC of the battery and SC, respectively.
4.2.1. Driving Cycle Prediction
Forecasting the driving cycle is crucial for EMSs, particularly predictive EMSs. The primary problem with EMSs is that power is shared within a predefined typical driving cycle, which cannot achieve ideal fuel economy due to the diversity of the driving cycles. Many unpredictable elements exist, particularly in metropolitan conditions, making it difficult to predict the critical driving cycle for FCHEV energy management. Driving cycle prediction can be accomplished through velocity prediction (VP), Pattern Recognition (PR), traffic flow modeling, intelligent transportation systems, and artificial intelligence. The performance of the driving cycle prediction technique directly impacts the performance of the EMS applied to the FCHEV.
Table 10 presents the latest research work comprising driving cycle prediction EMS approaches.
4.2.2. Model Predictive Control
Another predictive EMS approach is the Model Predictive Control (MPC) which creates a model for calculating future system response by analyzing the previous and current system variables. It is a widely used method to perform optimal resource management in real-time. It is a practical approach to dealing with systems with multivariable control problems such as FCHEV. It involves predicting future system responses through online optimization while considering historical and future input and output data.
Figure 10 presents the basic working principle of the MPC in the case of an FCHEV. MPC implication in the case of FCHEVs is suitable because the FCHEV structure is complex and has multiple control variables. Additionally, MPC is favorable for examining the FCHEV performance in real-time applications.
MPC, along with various latest scientific variations, such as linear MPC, nonlinear MPC, adaptive-MPC, Stochastic MPC (SMPC), learning-based SPMC, are considered in the latest literature for optimal energy management in FCHEVs. These different types of MPCs provide optimal performance by integrating the latest stochastic and machine-learning approaches to enhance the MPC performance and deliver more realistic results. Learning techniques are integrated with MPC to adjust the optimization problem’s parameters and enhance performance.
Table 11 highlights the latest research work consisting of MPC and the latest MPC advancements for optimal resource management in FCHEVs.
4.3. Learning-Based (LB) EMS Techniques
Most modern EMS approaches rely on prediction algorithms or predefined criteria. However, they have limited adaptation to real-time driving situations and cannot deliver the optimal solution for actual driving conditions. The learning-based EMSs can compensate for these shortcomings and have the benefit of not requiring a model and are capable of learning the optimal strategy independently in real time. LB techniques have the real advantage of self-learning and adaptive capability for adjusting the system variables in a way to obtain the optimal performance. However, these EMS techniques require a large amount of real data to train the learning-based EMSs. The learning-based EMSs majorly involve reinforcement learning (RL), neural networks, multimode strategy-learning vector quantization (LVQ), and supervised and unsupervised learning EMSs. These EMSs also involve a large amount of mathematical support and calculations to train the learning EMSs so that the required optimal performance can be achieved from it.
Table 12 highlights the latest research work consisting of LB EMSs for performance enhancement of FCHEVs.
It can be observed that both online and offline have their respective benefits and limitations that should be considered before their consideration. Several research publications considered these EMS methodologies and justified their point of utilization. However, most of the research works did not perform the experimental hardware verification of their results. The experimental verification of any proposed system configuration or the EMS technique is necessary to determine whether the proposed approach is practically viable. If a proposed technique does perform satisfactorily under an experimental setup, then future research directions related to the practical implementation of the proposed technique can be investigated. Hardware implementation setup clarifies that the proposed system is efficient under the actual system design environment and is ready for practical implementation.
However, there are several design and implementation challenges in the hardware implementation of some experimental work that hinders the researchers from carrying out the implementation. The very first issue is the hardware and the system design interfacing of the power electronic components as they contain several switching and hardware testing components. The proper interfacing between the hardware design and software will ensure proper results [
114]. The other major challenge is the limited processing power and frequency of the available hardware components [
115]. This limitation in the processing power of the hardware components causes irregularities and other malfunctioning that deviates the results obtained through hardware setup from the simulation work. Hardware implementation of simulations also face the challenge of troubleshooting as the designed hardware test bench can face some issues related to any design component and integration. The troubleshooting of such issues become a very tough process and requires a lot of expertise and design experience [
114].
The hardware experimental data can also help the researchers and the manufacturing units to directly integrate any proposed technique with the actual FCHEV configuration without any extra validation study.
4.4. Standalone EMS Techniques
A few EMS techniques considered in recent publications do not come under the category of online and offline EMS techniques but are rather known as standalone techniques. These standalone EMS techniques have a small contribution towards the performance enhancement of FCHEVs, and their real impact on overall system performance is minimal.
Table 13 presents the standalone EMS techniques considered in the recent literature.
5. Challenges and Issues Related to FCHEV Globalization
Various considerations in terms of configurations, power trains, energy resources, and other design dynamics are required to form an optimum FCHEV. The current FCHEV market is growing exponentially but faces various design and development issues and challenges whose resolution is necessary for its global impact and acceptance. Internal combustion engine cars and battery electric vehicles are the major competitors of the FCHEV, and their performance and efficiency should be comparable to these as well.
5.1. Optimized EMSs Integration
A vehicle’s first and foremost requirement is its optimal performance in the sense of power allocation among the available energy resources in such a way that the power demand is optimally satisfied. Many of the latest research contributions have considered various EMS techniques to be integrated with the FCHEV for optimal power allocation and SOC control delivery. All of the techniques have their benefits but lack in some aspects, making their implementation in real-time applications a bit challenging and computationally expensive.
Table 14 presents the comparative analysis of the frequently used EMS techniques in the form of pros and cons. It can be estimated that the optimal EMS strategy selection under current development is complex, and some trade-offs need to be considered.
5.2. Hydrogen Availability and Storage
The commercialization of FCHEVs on a global scale can be an alternative to fossil fuel EVs and can be a competitive transportation with numerous advantages over other transportation sources. However, the fuel with which FCHEVs work is not commonly produced or available in the form that is suitable for FCHEV application.
Table 15 presents various ways of generating hydrogen presented in the latest literature. However, there is a need for extensive research work to find a cost-effective, efficient, and long-lasting solution for hydrogen availability.
The hydrogen generated in most of the processes cannot be directly utilized in the FCHEVs, as they require hydrogen at some specific pressurized condition to increase the energy density of hydrogen. In the same context, the next challenge would be the storage of the hydrogen at extremely high pressure with extremely low-temperature conditions, so that the hydrogen energy density can be increased while the hydrogen tank size can be decreased. This solution can help store a large amount of hydrogen fuel in a smaller space and ensure a more extended vehicle driving range in return.
5.3. Safety and Environmental Concerns
Hydrogen, the primary energy resource in FCHEVs, is the reason for consumers’ most significant safety concern. Hydrogen is a highly flammable and explosive gas that requires storing at high-pressure conditions in FCHEV applications. Hydrogen also reacts with oxygen and is highly flammable and explosive in that case as well. There is a potential threat in the form of an explosion in the hydrogen storage facility in the vehicle, which can source severe health and safety issues. Another concern in the FCHEV design is the hydrogen tank placement, which is usually placed at the rear end of the vehicle. This configuration at times of sudden collision can also be a safety concern; there is an extensive need to look for secure and highly trustable hydrogen storage options so that the passenger safety concern can be majorly mitigated.
Hydrogen, if produced through renewable energy resources, is a green alternative to fossil fuel, as it does not generate any GHG emissions during its application in FCHEVs. However, the primary hydrogen production at the industrial scale is through methane steam reforming or partial oxidation. These mass hydrogen production techniques generate a large amount of carbon monoxide, which is highly hazardous to the environment. As most of the hydrogen production is through processes that are hazardous to the environment, there is an extensive need to shift towards renewable energy-based, nonpollutant methods for hydrogen generation to provide the claimed emission-free hydrogen transportation.
5.4. Economic and Societal Issues
Fuel cells are the primary energy source in FCHEVS but are the most expensive ones. Their capital cost has a significant share in the FCHEV costs that are available in the market. The FCs preferred in FCHEVs are the expensive proton exchange membrane FCs compared to other energy resources such as batteries and SC. Research is required to develop such FCs that are cost-effective, small, and have higher energy efficiency.
FCHEVs have enormous benefits over their competitors in the form of ICEs and BEVs as they have emission-free propulsion and wider driving ranges than any other EV types. However, before the FCHEVs are present in the market, there is a definite need to install hydrogen refueling infrastructure independent from the giant oil and gas industry partners as they can influence customer preferences. Broad infrastructure development of hydrogen refueling stations with consumer incentives would be necessary before the macro involvement of FCHEVs in society.
5.5. Other Challenges
Other challenges in the performance enhancement and globalization of FCHEVs may include the integration of advanced multiobjective algorithms with the optimal EMS techniques. The multiobjective algorithms can provide efficient performance from the same EMS techniques. These algorithms may include the advanced nonsorted and droop control-based genetic algorithm, reactive search, PSO-Grey Wolf optimization, strength Pareto algorithm, deep learning algorithms, and other AI- and machine learning-based multiobjective algorithms [
119]. The implementation of these algorithms can be made possible through a proper scientific and technical assessment of the system design. These algorithms, when integrated with either offline or online EMS techniques, will enhance the efficiency and reliability of the EMSs.
However, the optimal performance of any evolutionary multiobjective algorithms depends upon some factors. The first most important thing is the optimal parametric tuning and the selection of effective parameter values will depict the performance of the algorithm [
120]. There also can be issues of nonconvergence of the algorithm to the global optimum and being stuck with local optima. This is a reason that the implementation of the algorithms in the sensitive systems should be done more carefully [
121]. Thus, the optimum performance of multiobjective algorithms depends upon the right selection of tuning parameters and the global convergence of the solutions to achieve the desired output.
Other major challenges may include the challenges related to water, air, and thermal management of the fuel cells. The fuel cell lifespan, system durability, and public awareness can be some other potential challenges as well. The FCHEVs may also face the challenge of high cost depreciation in the first years as the technology is not common and the public is still reluctant to use them. Similarly, there are very few manufacturers in the field, so the user has few options for buying FCHEVs. Overall, this technology is still under development and requires consistent research and development efforts to receive global acceptance and public consent.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}