1. Introduction
Electrically excited claw-pole generators have been widely used in automobiles because of their simple manufacture, low cost and good working stability. However, with the advancement of automotive technology and the increasing number of electrical equipment in automobiles, the problems of low efficiency, low power density and high harmonic content of voltage of traditional claw-pole generators have become more and more prominent [
1,
2]. These electric devices have gradually failed to meet the usage requirements. To improve the performance of electrically excited claw-pole generators, a large number of scholars have proposed different solutions.
There are three main common solutions. The first one is to change the excitation method and use permanent magnets instead of electrically excited windings [
3]. This solution can effectively improve the air-gap magnetic density, but once the size and arrangement of permanent magnets are determined, it is difficult to adjust the permanent magnetic field [
4,
5].
The second is to place a ring-shaped structure of permanent magnets between the jaw yokes of the electrically excited jaw-pole generator, and the excitation winding is set on the rotor jaw-pole yoke, forming a tandem hybrid excitation structure [
6,
7]. This solution can effectively reduce the inter-pole leakage flux. However, since the electrically excited magnetic potential and the permanent magnet potential are in series, the flux generated by the electrically excited winding has to pass directly through the permanent magnet. Furthermore, in order to operate with mixed excitation, the excitation winding must be injected with a large enough current, resulting in a large added copper consumption. At the same time, the permanent magnet may be demagnetized permanently if the excitation winding is connected with a large current [
8,
9,
10].
The third option is to use two rotors, an electrically excited rotor and permanent magnet rotor, coaxially parallel to each other to share the same stator parallel hybrid excitation structure [
11,
12,
13]. This solution can meet the advantages of both the electrically excited claw-pole motor with good performance and permanent magnet motor with a high power density. However, the coaxial parallel arrangement requires a long axial space, which increases the axial length and volume of the motor. Moreover, there are both radial and axial three-dimensional magnetic circuits in this structure, and these increase the complexity of the motor structure and decrease the power density [
14,
15].
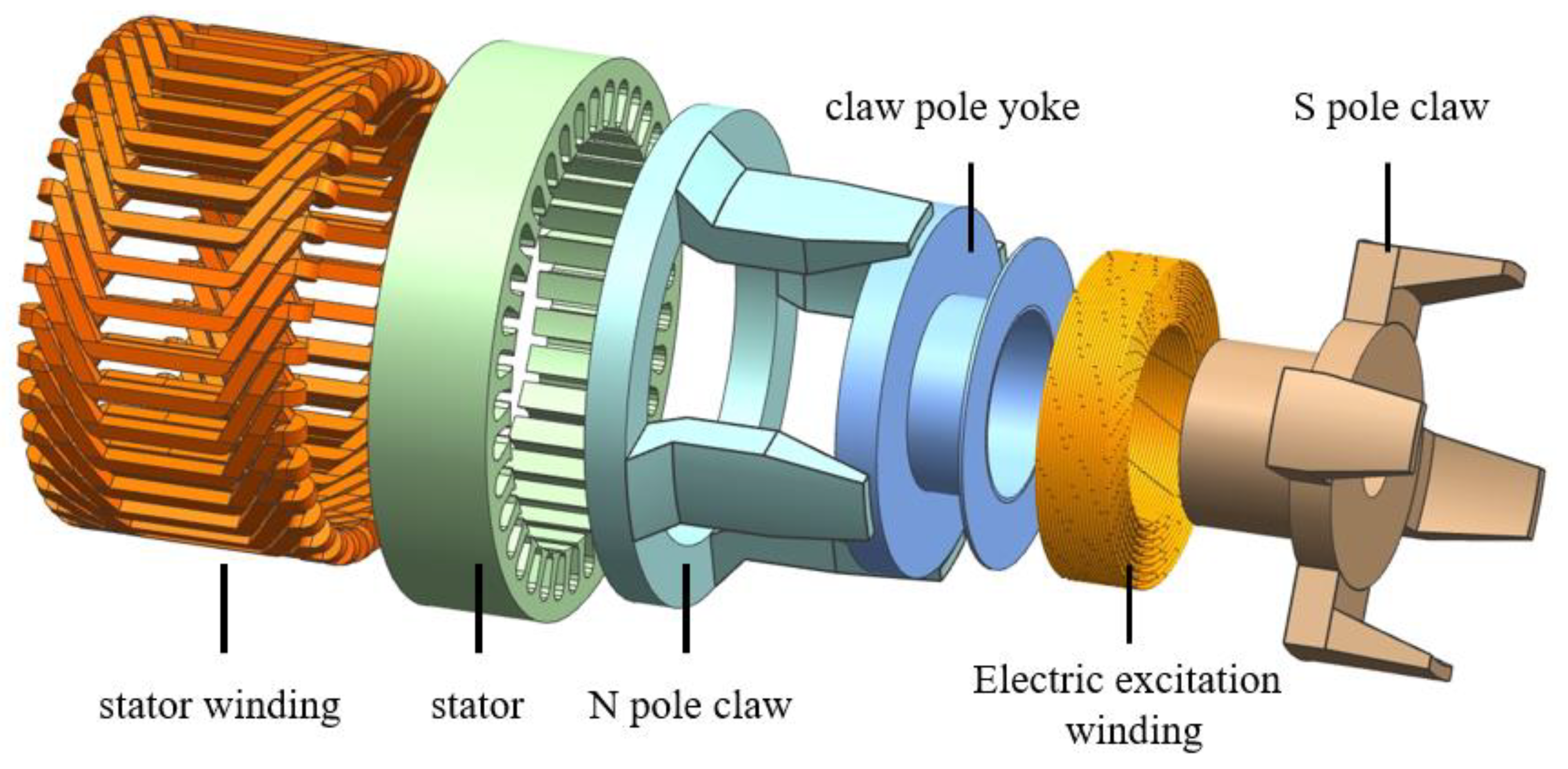
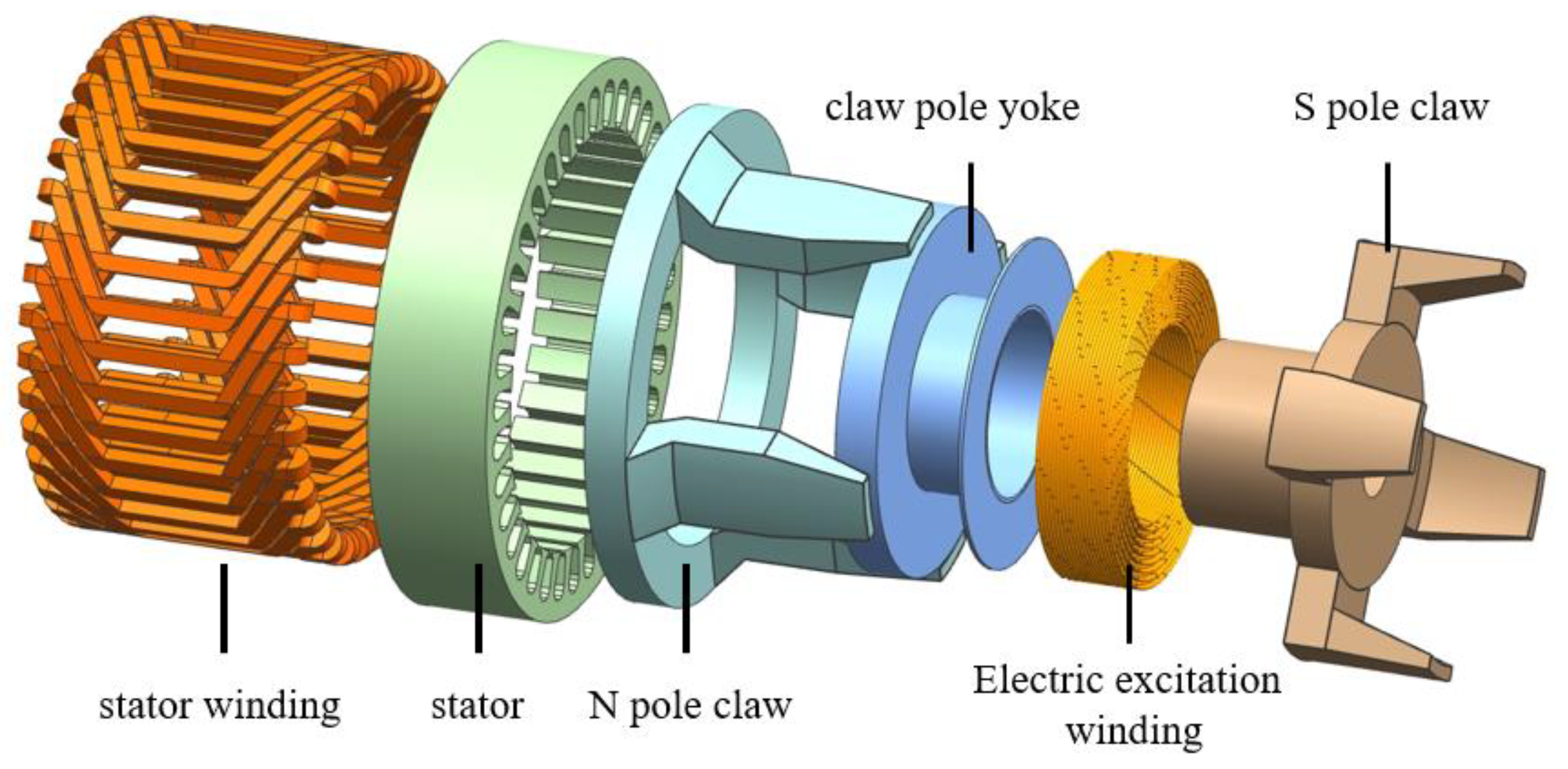
To keep the advantages of simple magnetic field adjustment of the electrically excited claw motor, while strengthening the air-gap magnetic density and increasing the power density, a reverse brushless claw pole is proposed in this paper. The electrically excited rotor extends the rotor N-pole magnetic conductor in a flared shape to form a larger toroidal magnet conductor and shrinks the S-pole magnet conductor in a bottleneck shape to form a smaller toroidal magnet conductor. It then places the excitation winding and toroidal magnet-conducting bridge between the two toroidal magnet conductors to form a reverse claw pole, as shown in
Figure 1.
3. Finite Element Analysis
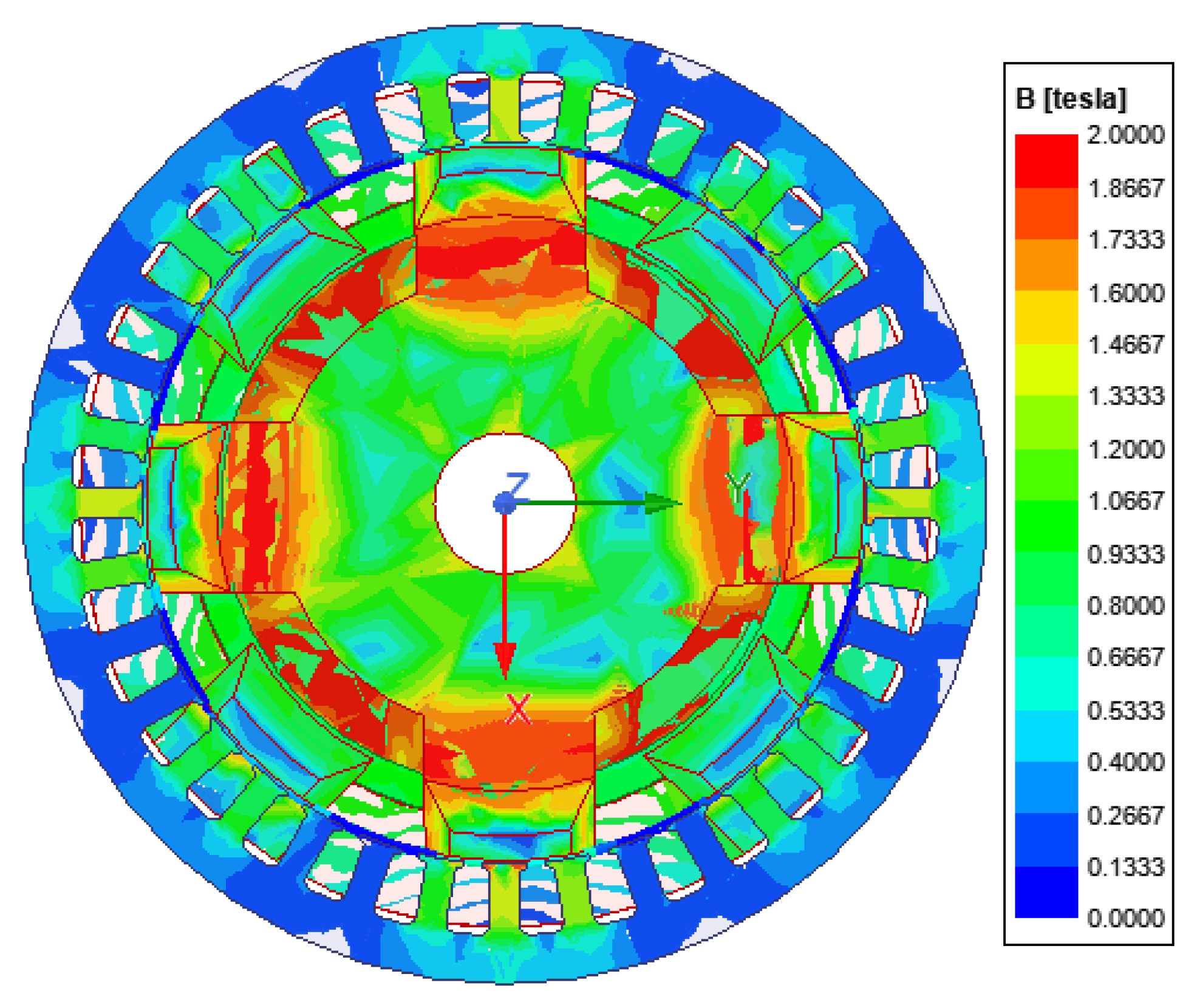
Taking a 3-phase, 8-pole, 36-slot reverse claw-pole electrically excited generator (rated power of 2 kW, rated voltage of 72 V and rated speed of 3000 r/min) as an example, a two-dimensional simulation model is established by using Maxwell finite element analysis software to verify the accuracy of the mathematical model.
Table 1 shows some structural parameters of the reverse claw-pole electrically excited generator.
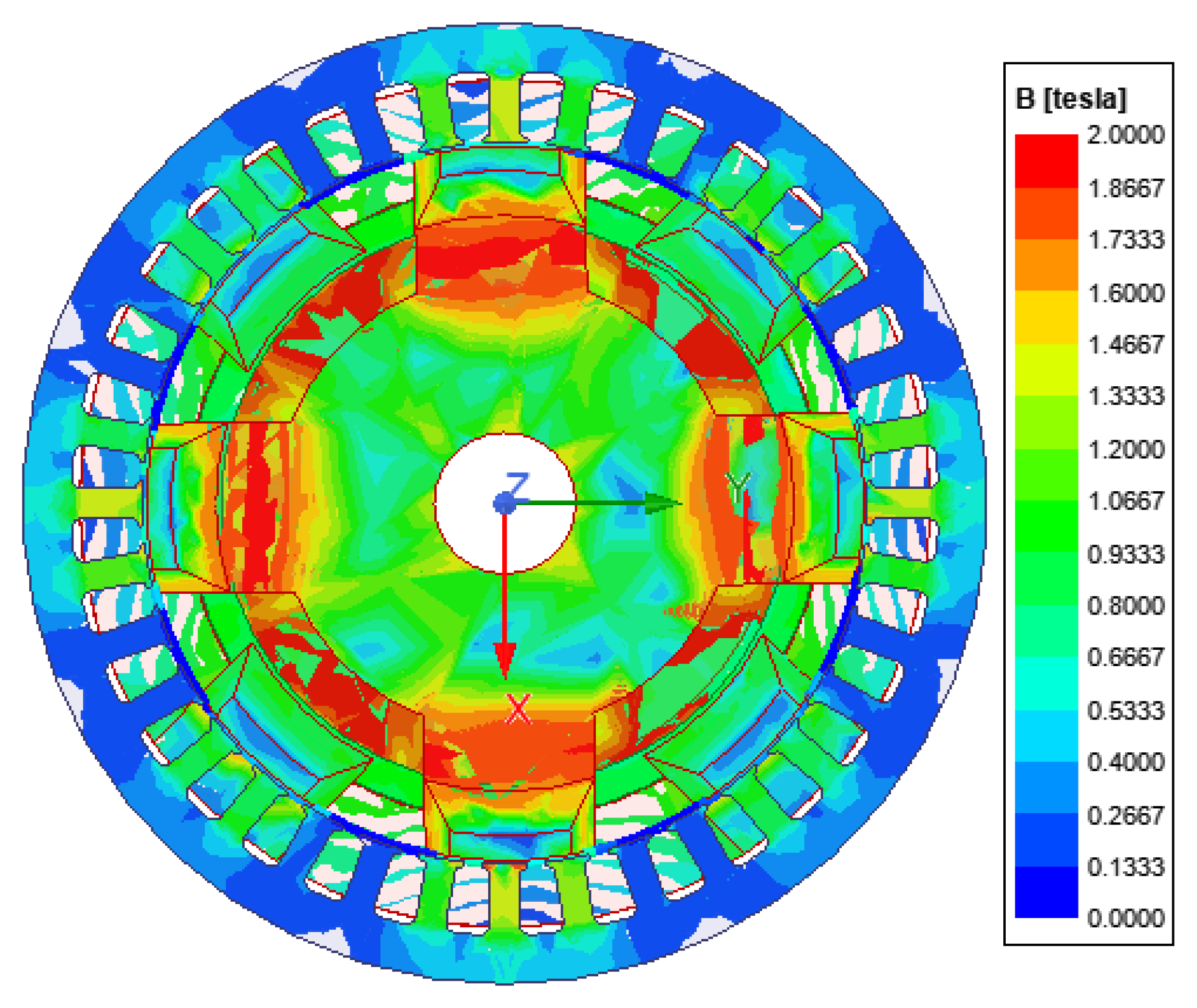
Figure 5 shows the magnetic flux density cloud of the reverse claw-pole electrically excited generator.
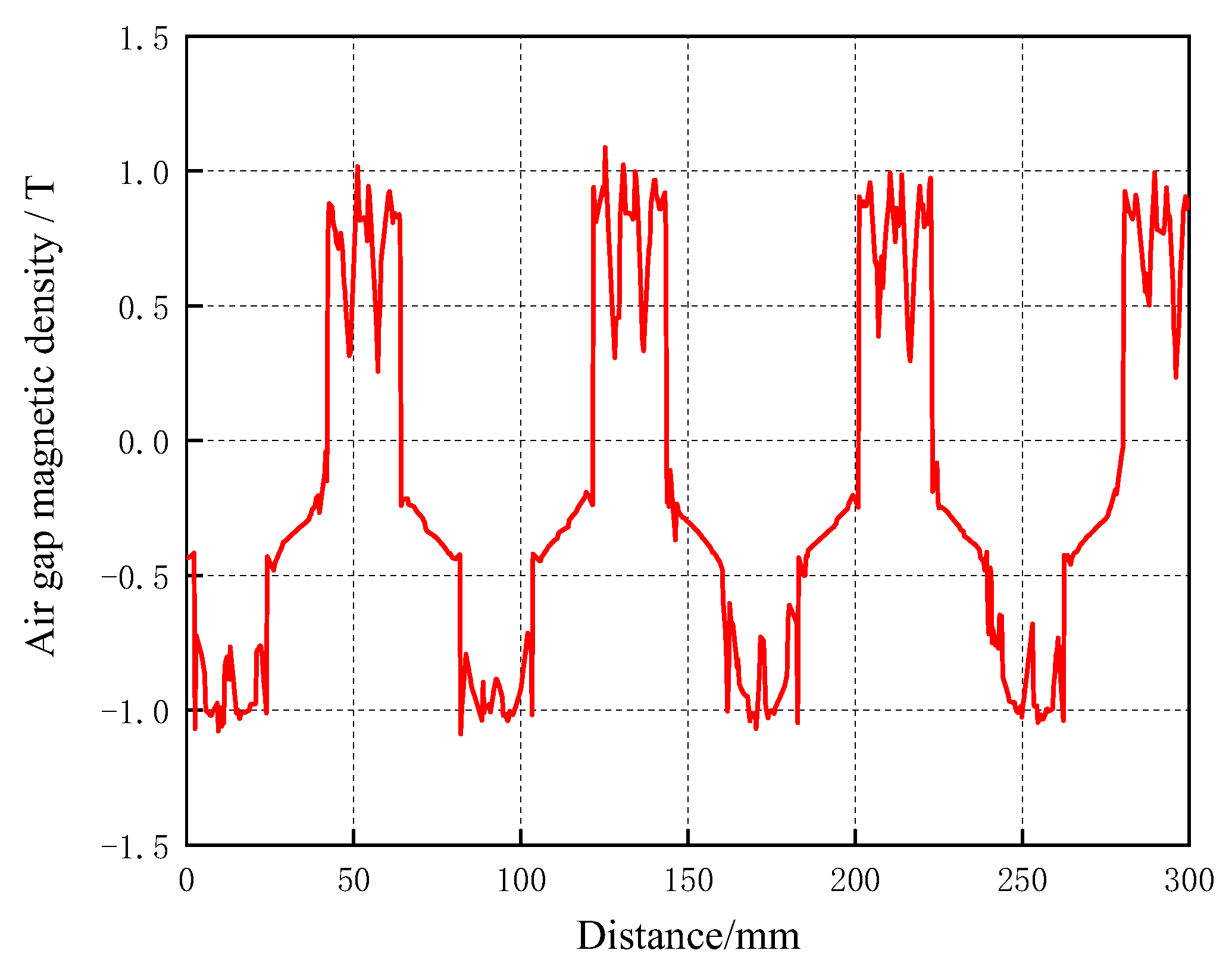
Figure 6 shows the magnetic density distribution of the air gap at the root of the claw pole. The simulation results show that the maximum magnetic density in the air gap is 1.09 T.
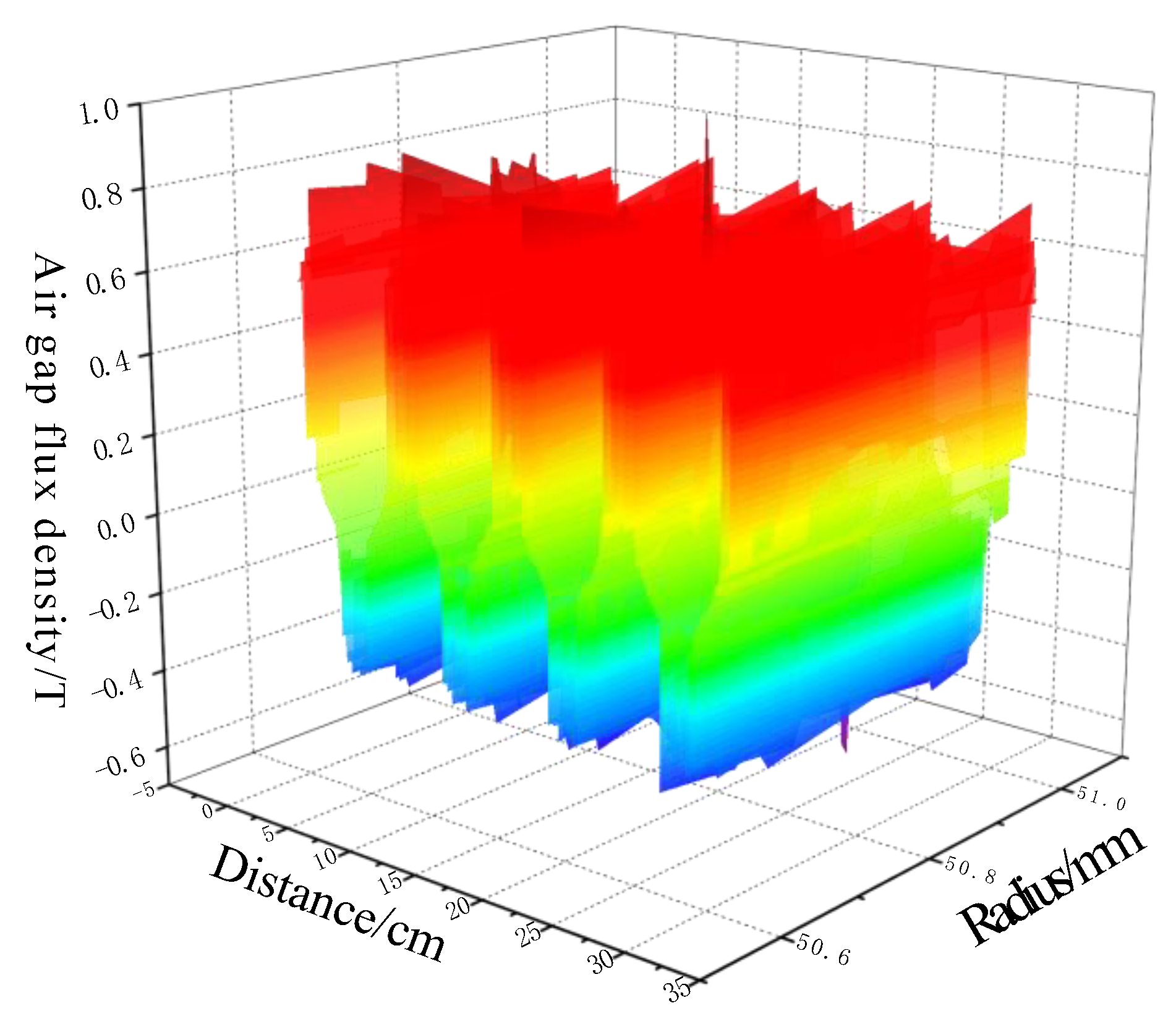
It is necessary to show the distribution of the air gap more clearly, so the magnetic flux density cloud map from the outer diameter of the claw pole to the inner diameter of the stator in the axial middle position of the claw pole is shown in
Figure 7. Moreover, the magnetic flux density cloud map from the root of the claw to the tip of the claw in the radial middle position of the air gap is shown in
Figure 8. From these figures, it can be seen that the flux density at the claw root is larger than that at the claw tip under the same air gap radius. Moreover, at the same distance from the claw root, the smaller the air gap radius is, the largest flux density is.
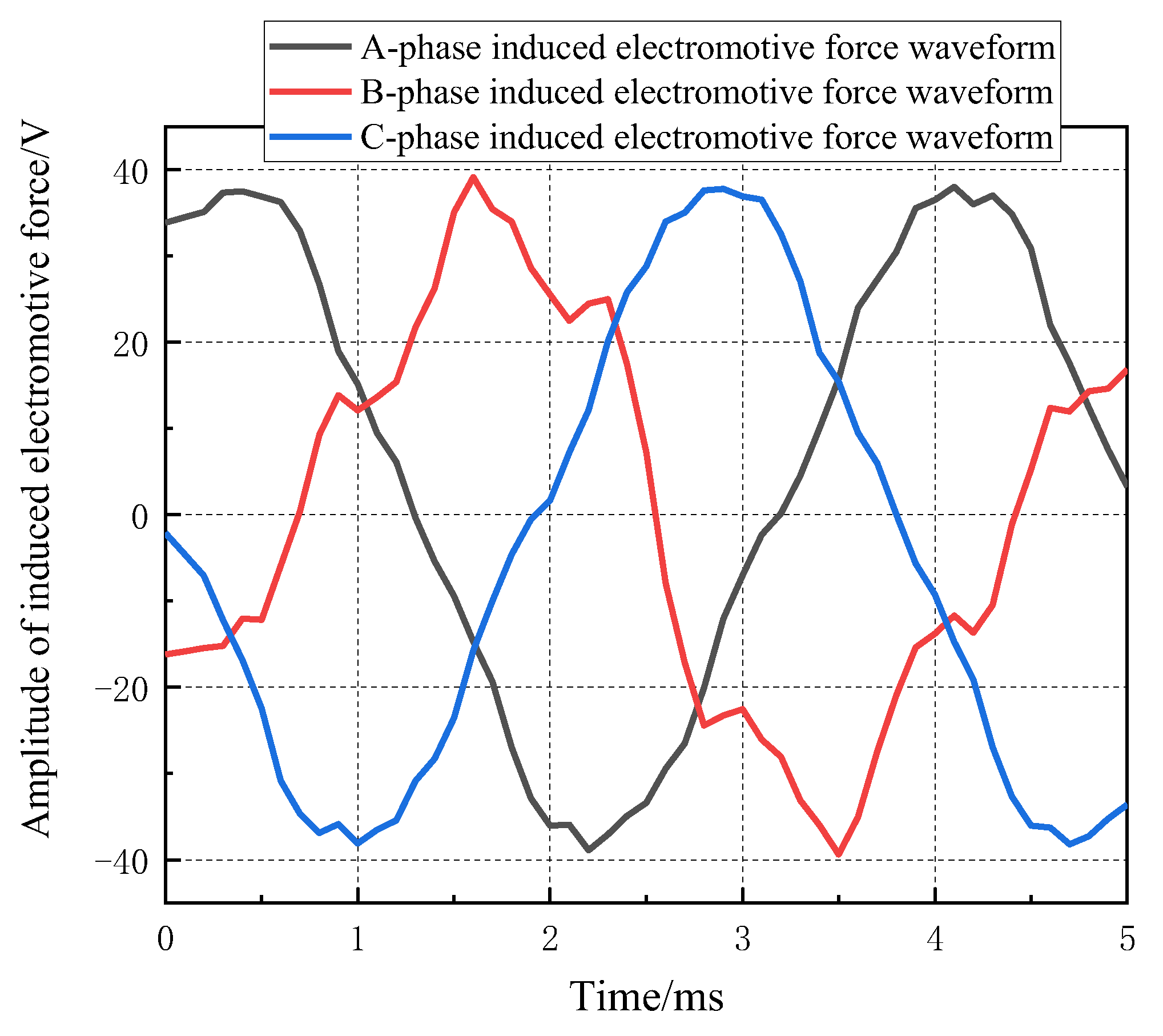
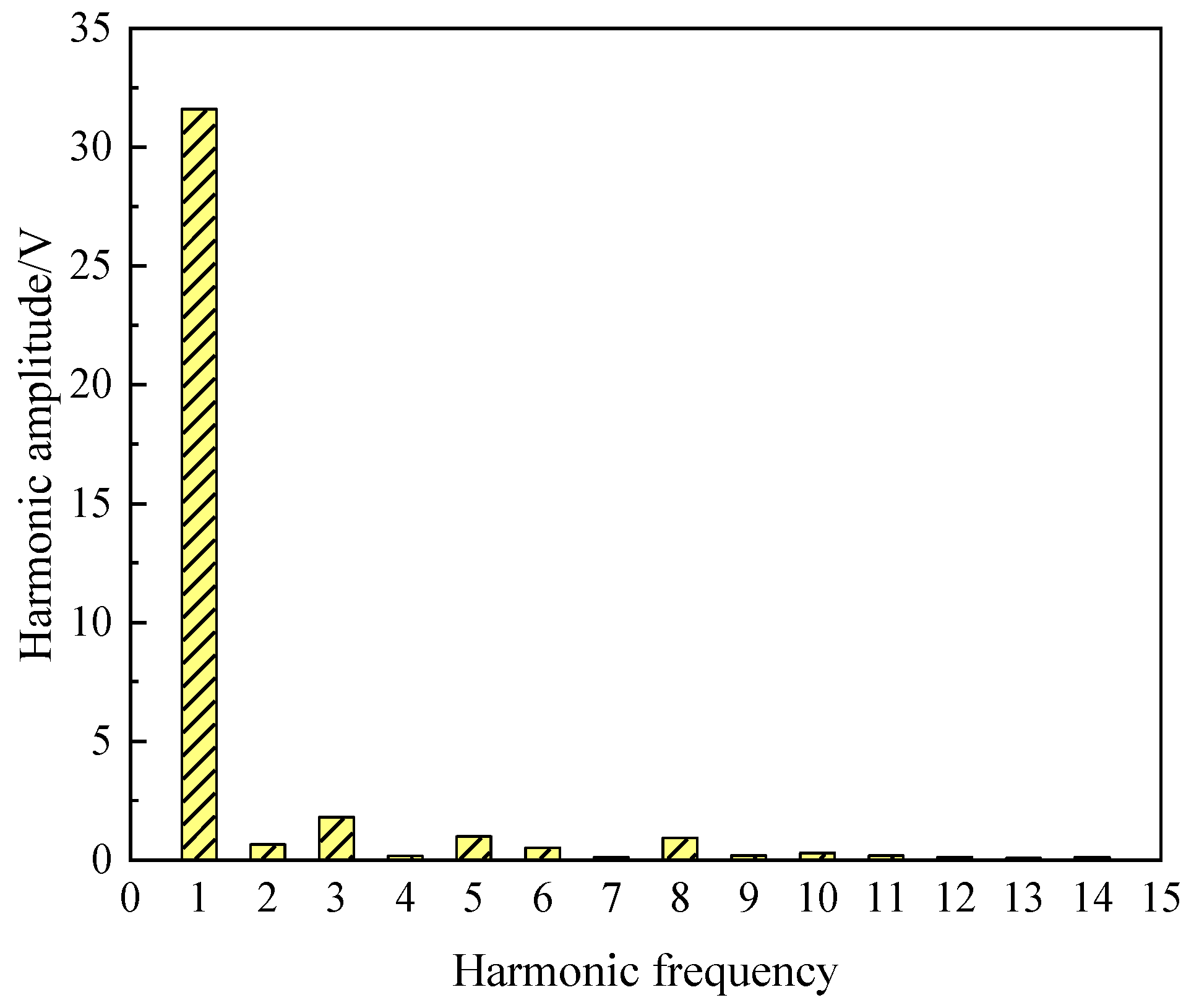
Figure 9 shows the no-load induced electromotive force waveform of the inverted claw-pole electrically excited generator, and the induced electromotive force waveform is basically sinusoidal with the maximum value of 38.82 V. Taking the Fourier decomposition of the induced electromotive force of phase A, the histogram of the harmonic distribution of the induced electromotive force can be obtained as shown in
Figure 10. From
Figure 10, it can be seen that the fundamental waveform amplitude is 33.63 V; the amplitude of each harmonic is shown in
Table 2, and the waveform distortion rate THD calculation for A-phase induced potential is 19.8%.
Changes in some structural parameters of the claw-pole rotor can significantly affect the generator performance and need to be optimized. However, the structural parameters of the claw pole are not independent, and the interconnection between the parameters and the influence of the parameters on the generator performance are complex and variable. According to the sensitivity of each parameter to the induction potential of the generator, the design variables are selected as the claw-pole tip arc coefficient, claw-pole root arc coefficient, claw-pole tooth tip thickness and claw-pole tooth root thickness. The base wave amplitude and sinusoidal distortion rate of the induction potential of the generator are the two optimization objectives. The constraints of each design variable are shown in
Table 2.
The optimization objective is to maximize the fundamental of the inductive electric potential and minimize the sinusoidal distortion rate while satisfying the constraints, and the optimization model is shown as follows.
where
UA represents the phase-A induced electromotive force fundamental amplitude, and
THD represents the induced electromotive force waveform distortion rate.
Due to the special characteristics of the claw-pole rotor structure, a three-dimensional model needs to be established for the finite element simulation calculation, and the calculation volume is large; thus, the Latin super-erection method with an optimized number of 100 sample points is used for sample collection of the design variables. Some of the sampling points are shown in
Table 3, where sample point 0 is the initial value of the design variables.
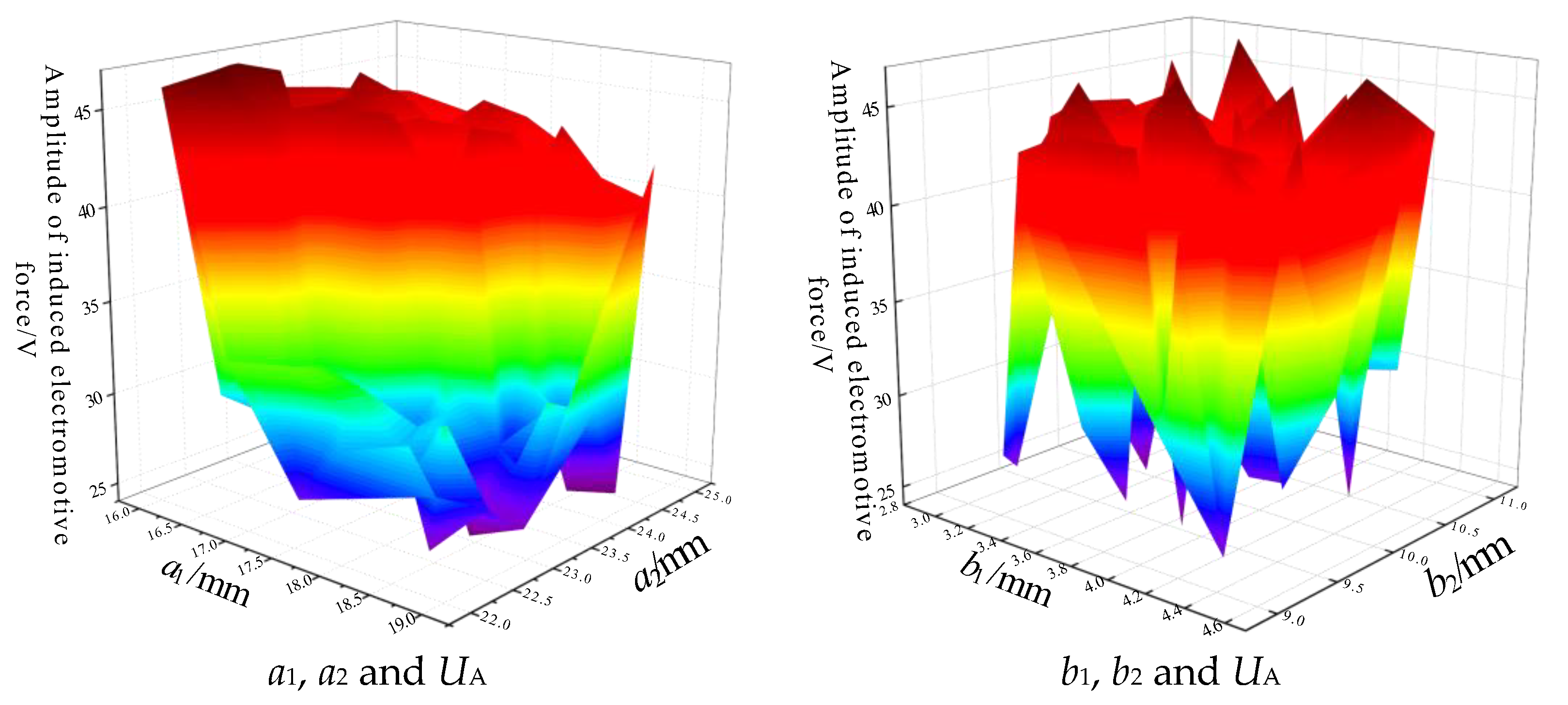
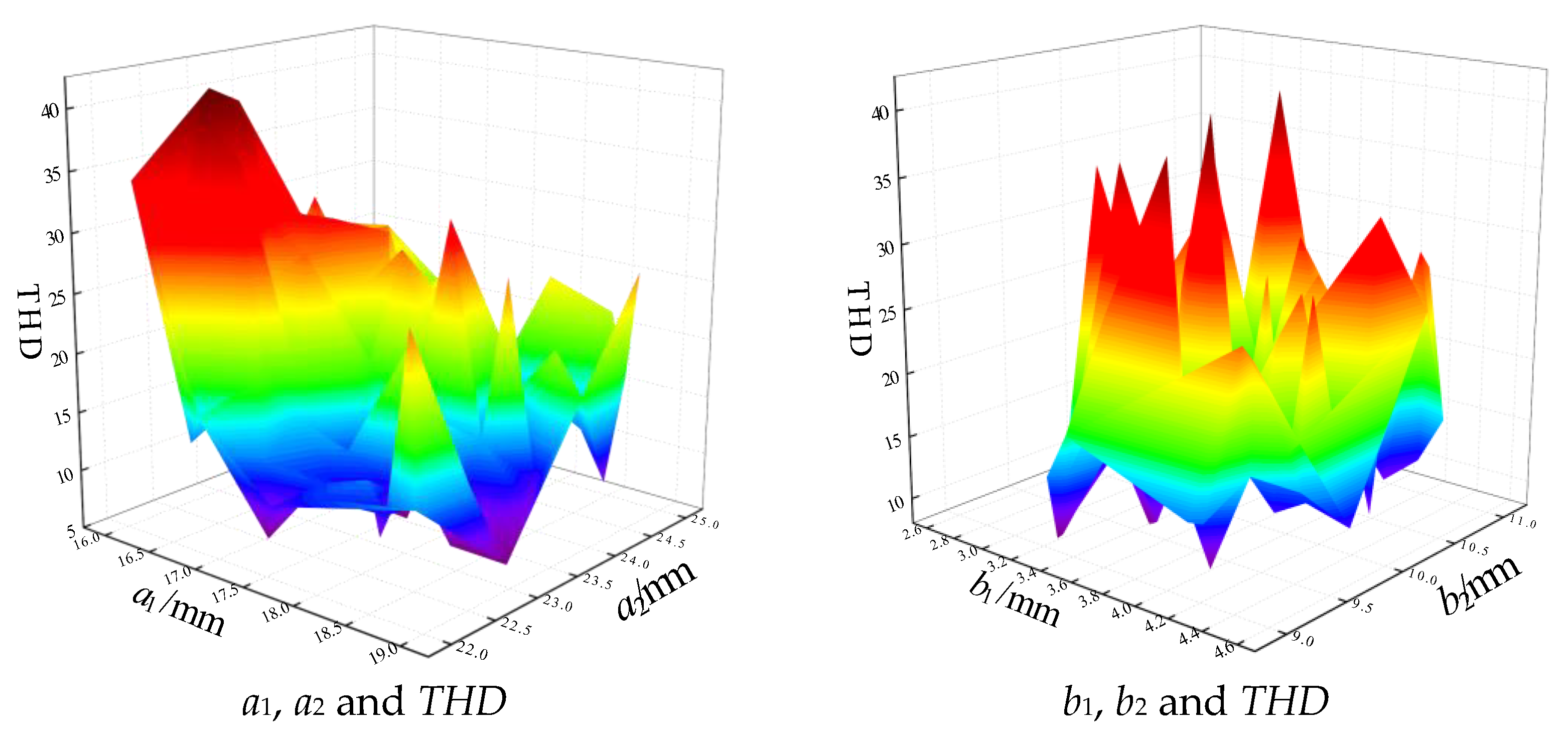
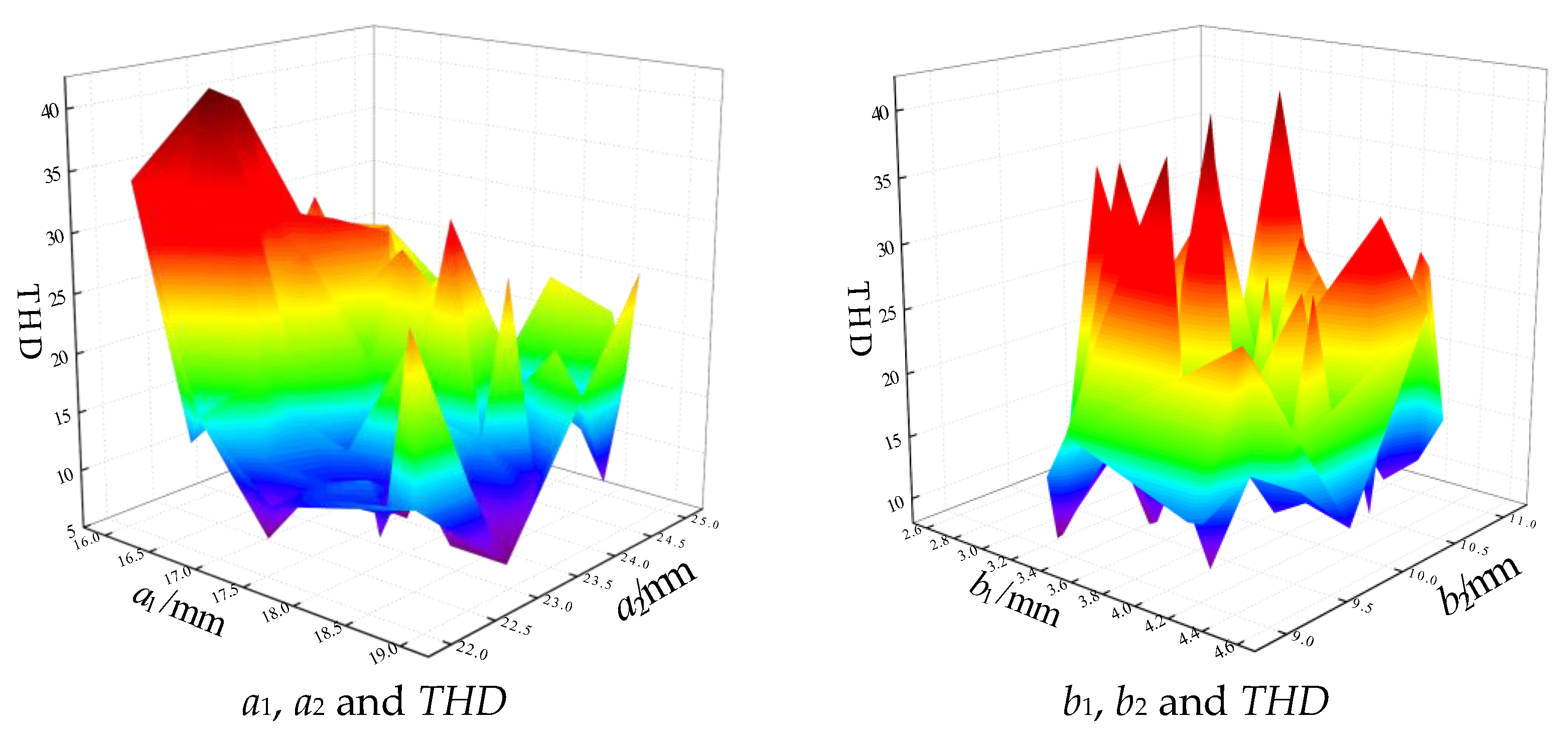
A simulation analysis is performed for 100 sampling points, and a plot of the fitted surface relationship between the design variables and the response values can be obtained. Some of the design variables and response values’ fitted relationship graphs are shown in
Figure 11.
As can be seen from
Figure 11,
a1,
a2 and the induced electric potential have an approximately single-peak linear relationship. The spatial relationships between the design variables and the response values have multi-peak, multi-valley, non-uniform and non-linear characteristics.
The characteristics of the effect of each design variable on the response value can be obtained from the fitted relationship between the design variables and the response value. It can be expressed by the sensitivity of each design variable to the change in the response value. The sensitivity of each design variable is shown in
Table 4.
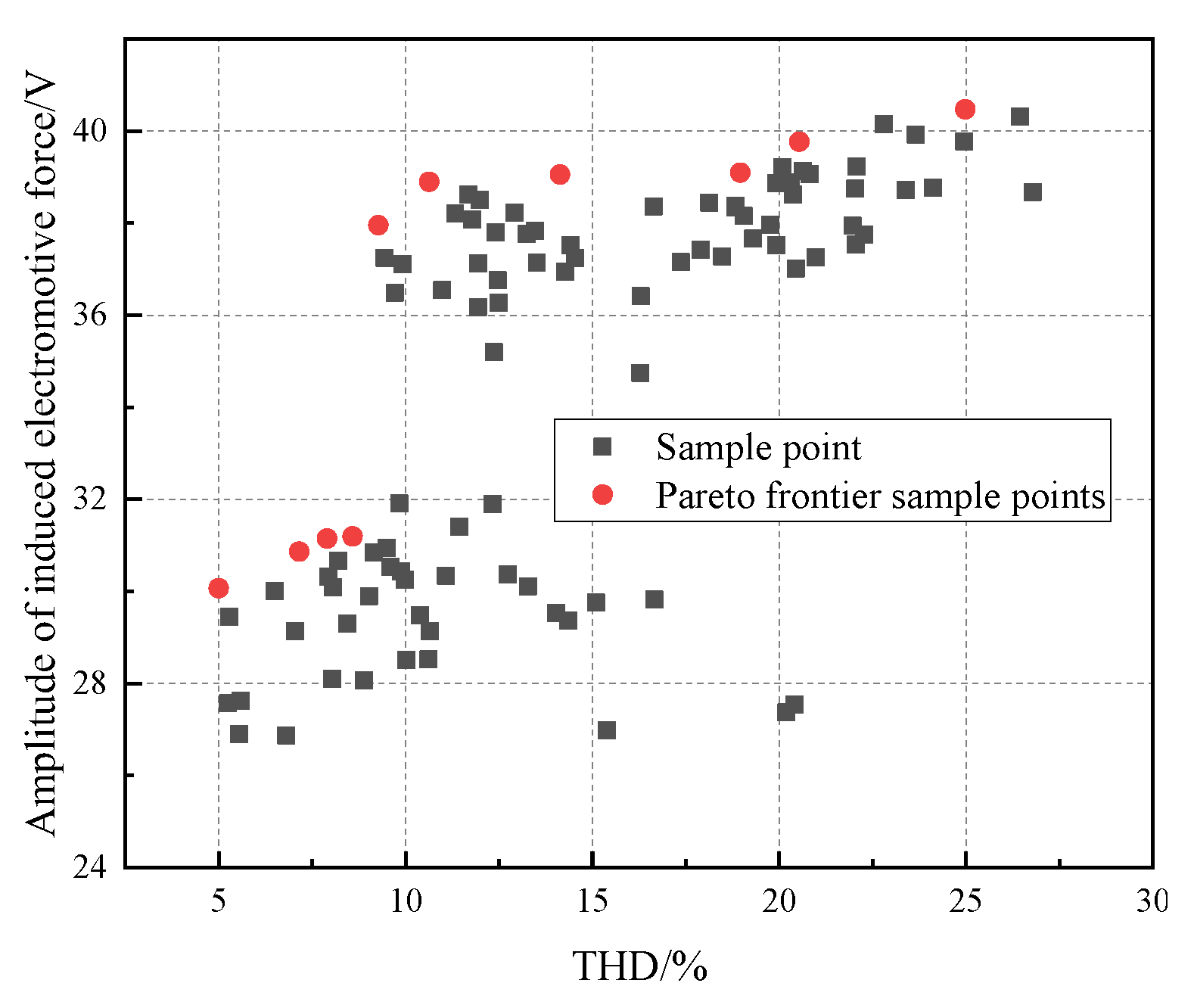
The pareto optimization method is a common method for solving multi-objective optimization problems, especially for two-objective optimal problems [
17,
18]. By solving the Pareto front, the distribution of the optimal solution set can be reflected intuitively in the two-dimensional space. The full sample points were counted, and their Pareto front distribution is shown in
Figure 12.
As can be seen from
Figure 12, there are 10 sample points on the Pareto front. These 10 sample points are the valid solutions of this optimization model, respectively, and the specific values of the design variables and optimization objectives at this time are shown in
Table 5.
To determine the relative optimal solution, K is defined and represents the parameter matching coefficient. The larger the value, the better the corresponding motor output performance, while assigning weights to the two optimization objectives. The expression of this is as follows:
In the formula, K is the performance parameter match factor, which represents the ultimate performance superiority of the motor; C1 and C2 are weighting coefficients, where C1 takes 0.6 and C2 takes 0.4; and U0 is the generator induces the electromotive force fundamental amplitude at the initial value of the design variable.
From this equation, the relationship between the two optimization objectives and K among the 10 valid solutions solved by the Pareto front can be obtained. The two optimization objectives are plotted against the matching coefficients, as shown in
Figure 13.
As can be seen from
Figure 13, sample point No. 37 is the “optimal solution” of the optimization model, at which the fundamental amplitude of the motor induction potential is 38.89V and the waveform distortion rate is 10.63%. The final value is obtained based on the values of the variables and the actual machining process. The optimal solution and the final value of each response variable are shown in
Table 6.
4. Experimental Validation
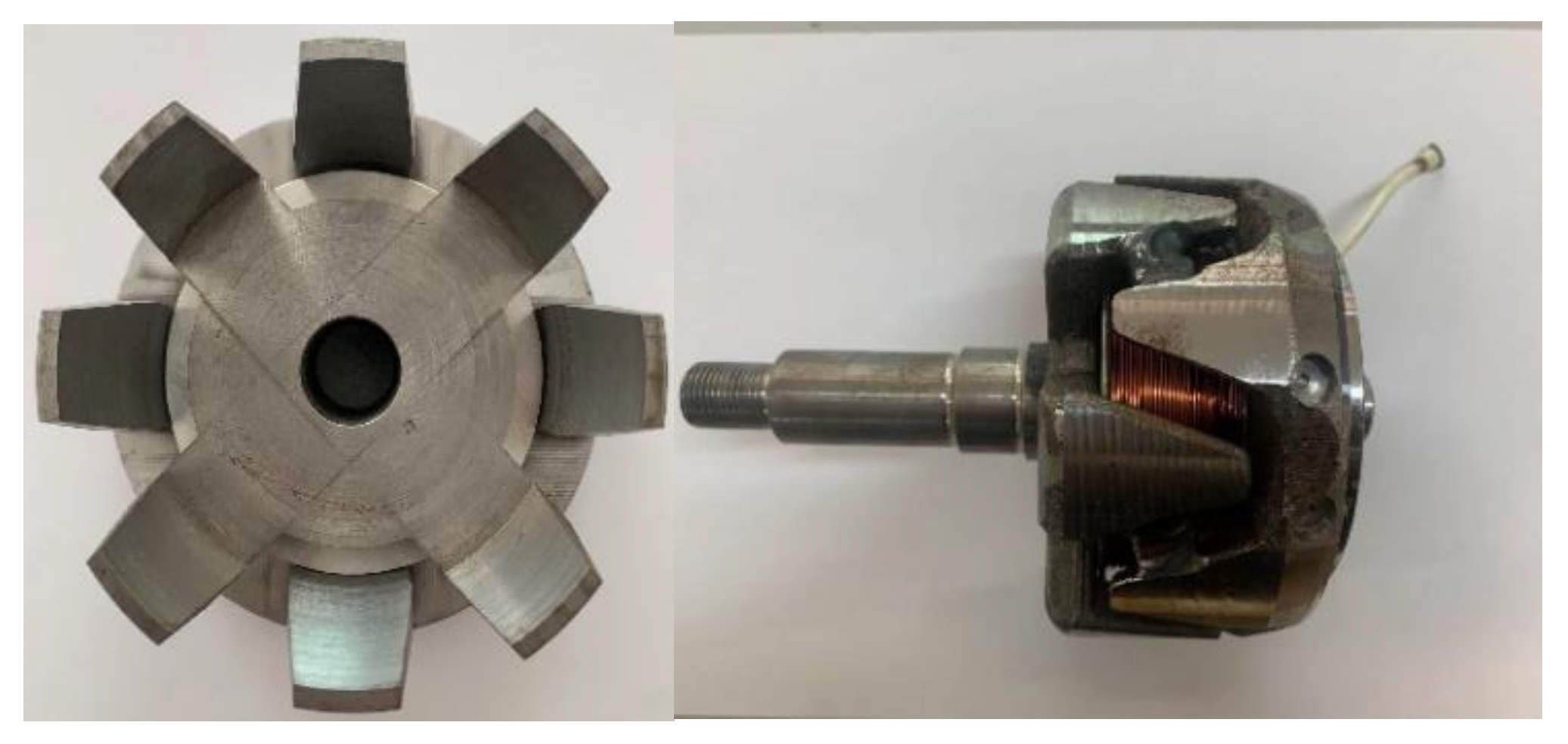
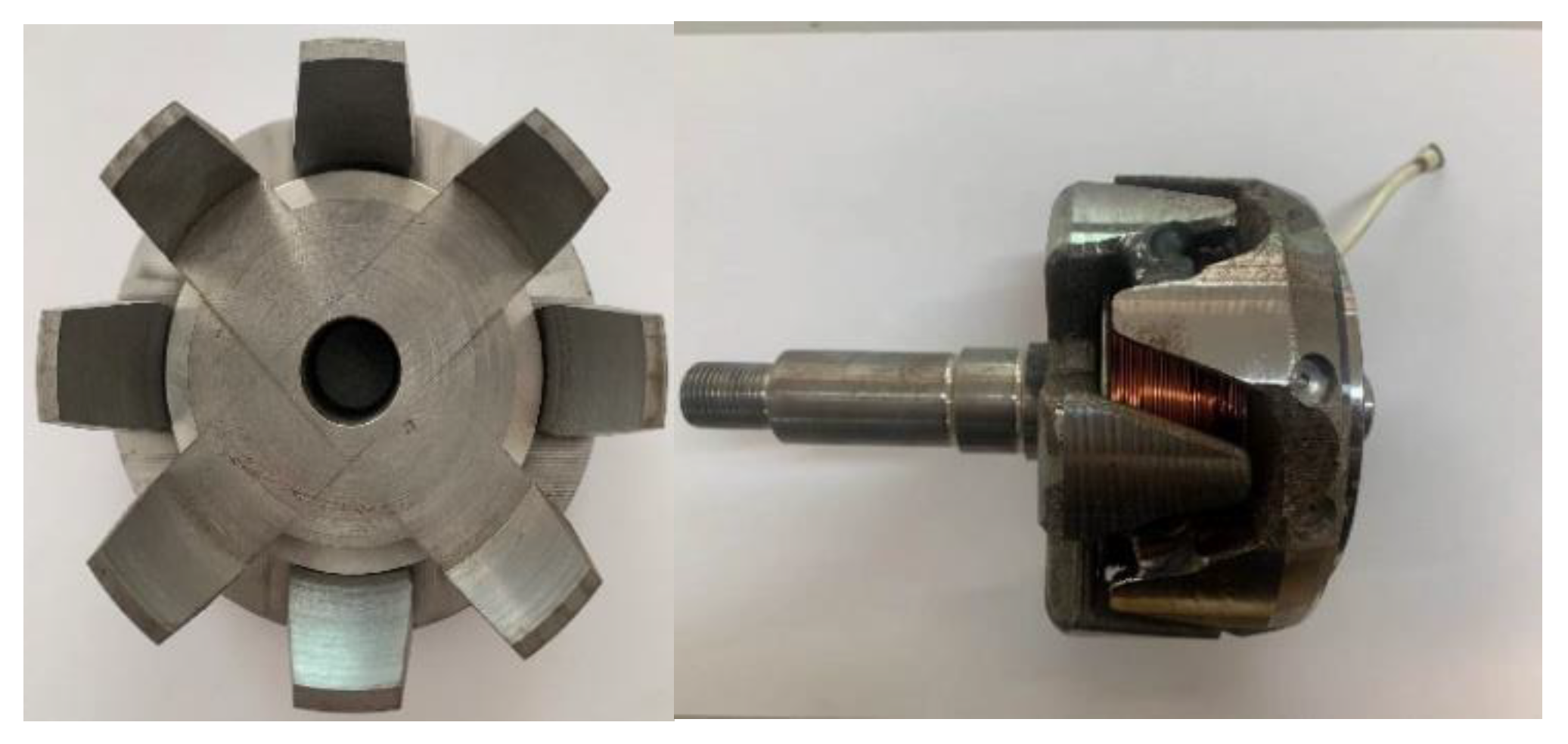
Based on the optimized motor parameters, the prototype is fabricated, and its performance is tested by using the generator test bench. The reverse brushless claw-pole electrically excited prototype and the conventional claw-pole electrically excited generator are shown in
Figure 14, and the generator test bench is shown in
Figure 15.
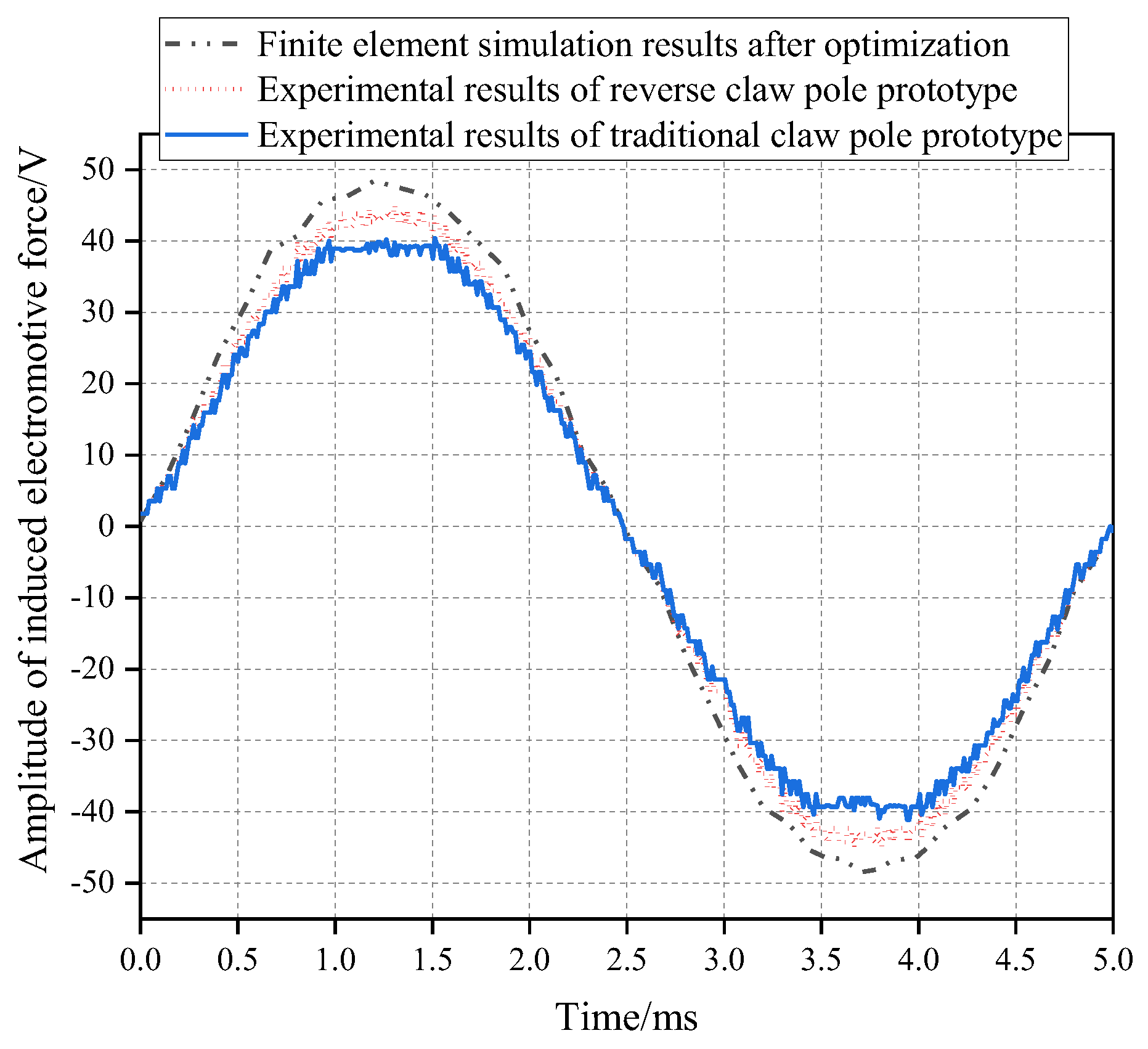
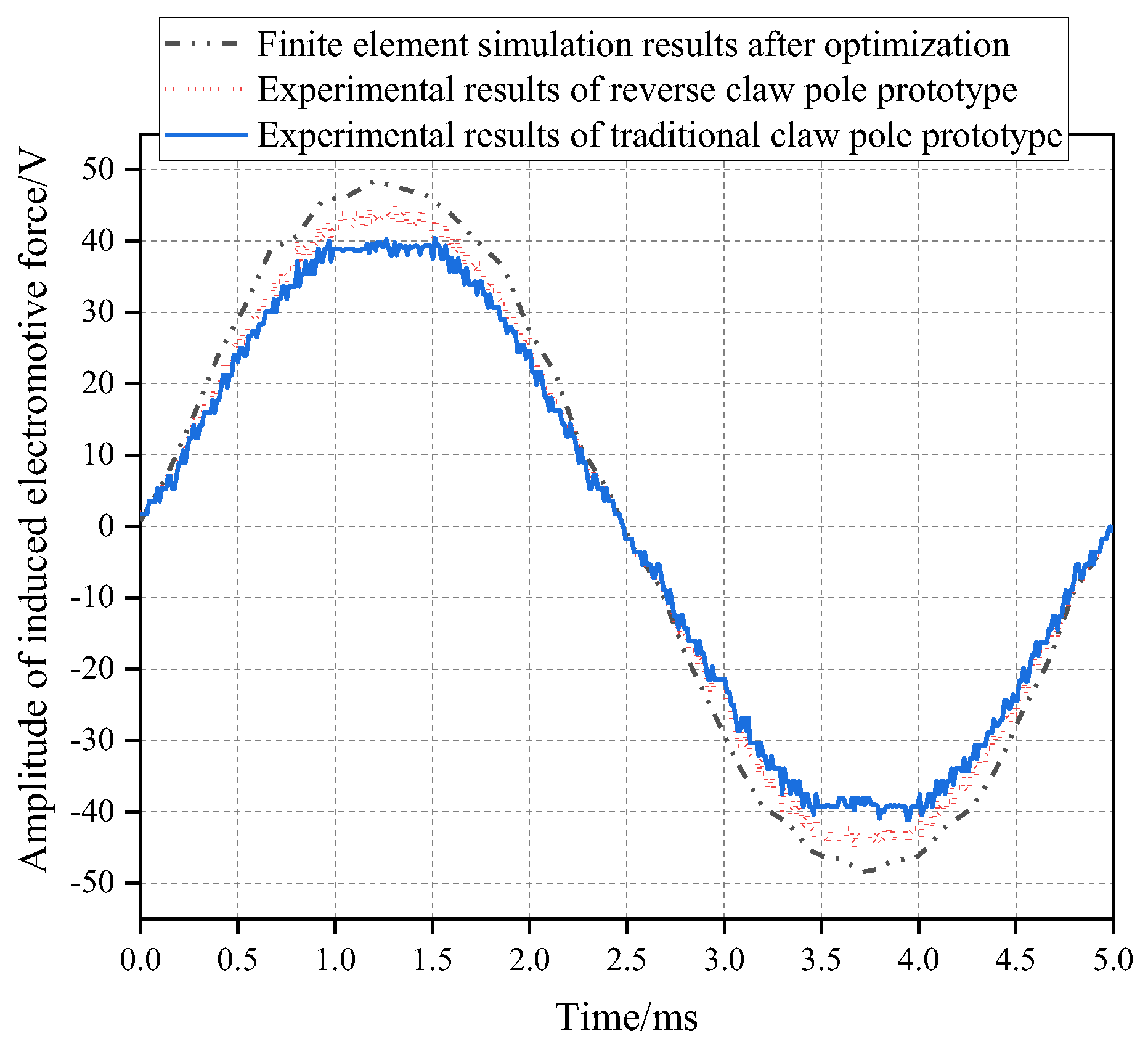
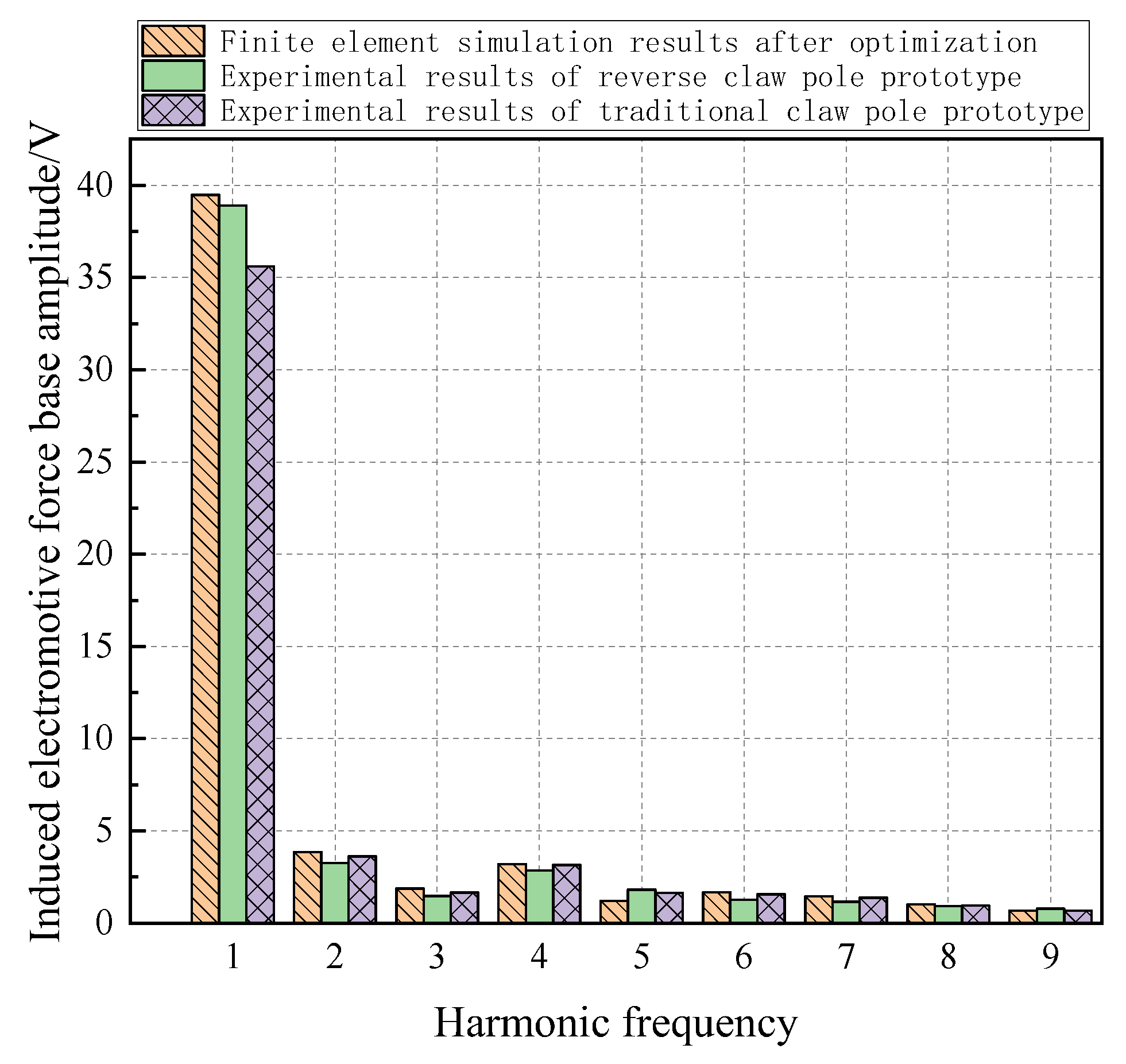
The no-load characteristics of the test prototype were obtained, and the no-load induced electromotive force curve and no-load induced electromotive force harmonic distribution of the generator were compared with the optimized finite element analysis results. The comparison results are shown in
Figure 16,
Figure 17 and
Table 7.
As can be obtained from
Figure 16,
Figure 17 and
Table 7, the no-load induced electromotive force waveform obtained from the performance test of the reverse claw-pole prototype is basically the same as the simulation result. It can be seen that the value at the peak is slightly lower, and the waveform has good sinuosity. The test results show that the fundamental amplitude of the no-load inductive electromotive force of the reverse claw polar prototype machine is 38.23 V. The error with the simulation result is 1.7%, and the distortion rate of the no-load induction electromotive force is 13.32%. The reason for the error with the test result is that the simulation value is only taken from the first nine harmonics, which is slightly lower than the actual value. Moreover, the test value can be accurately calculated by the generator test bench for all harmonics.
The waveform of no-load induction potential of the conventional claw-pole prototype has the phenomenon of “clipping” at the peak and trough; the base wave amplitude of the no-load induction potential is 35.37 V, and the distortion rate is 18.47%, which are different from the performance of the reverse claw-pole prototype. This is due to the structural limitations of the conventional claw motor-excited generator; in the case of the same rotor diameter, the width of the claw tip is significantly smaller than that of the reverse claw generator. The width of the claw tip of the tests prototype is only 8 mm.
Figure 18 and
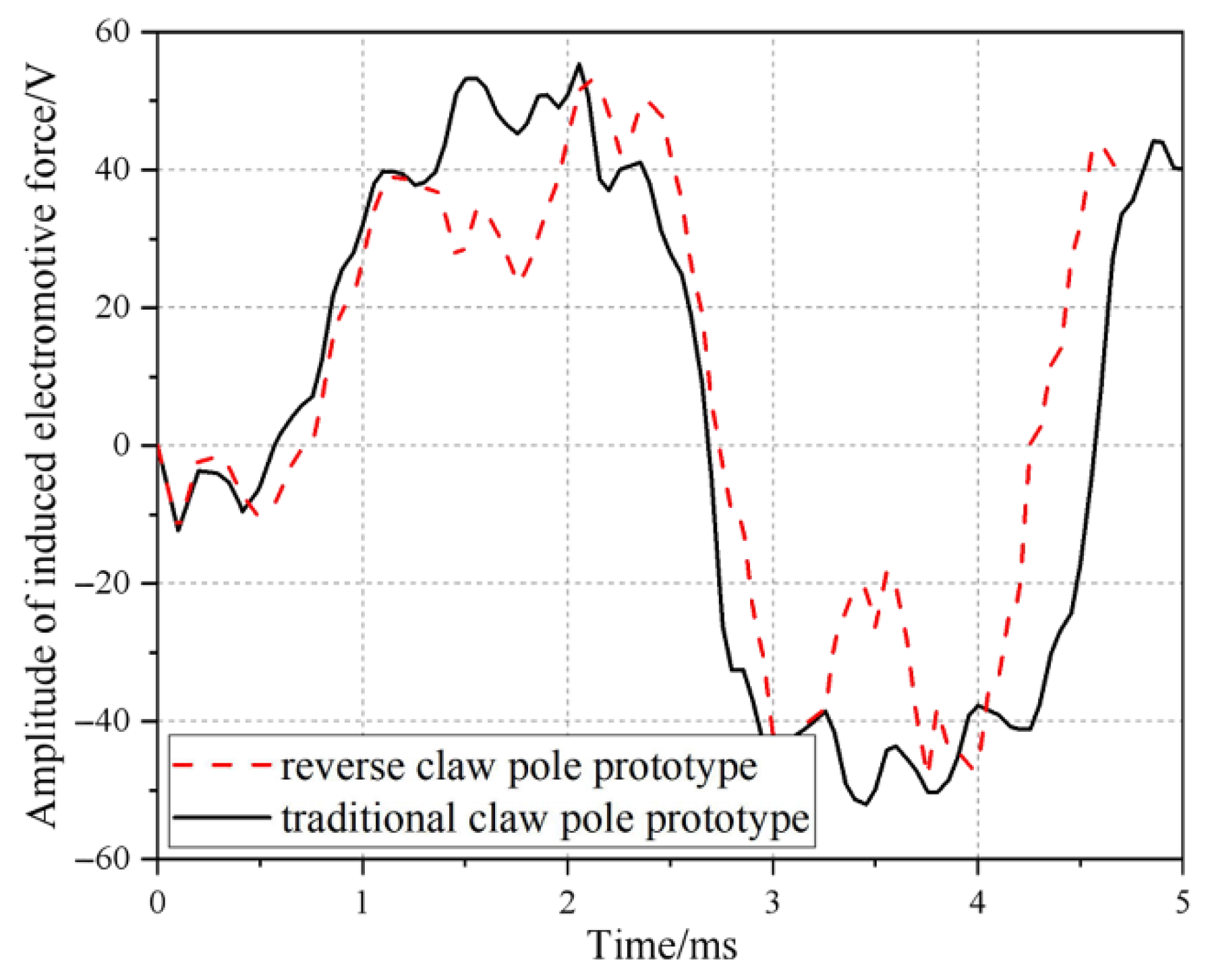
Figure 19 show the variation curves of the induced electromotive force of the generator at a load of 50 Ω and 100 Ω, respectively. It can be seen from the figure that, with the increase of the load, the induced electromotive force waveform distortion of the traditional claw motor generator is greater. At a 100 Ω load, the induced electromotive force has an obvious depression at the crest and trough of the waveform. At the same time, the maximum induced electromotive force of the reverse claw-pole generator is greater than that of the traditional claw-pole generator.


 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}