1. Introduction
The number and complexity of Unmanned Aerial Vehicles (UAV)-based operations are increasing each year. Electric Vertical Take-off and Landing (E-VTOL) aircrafts constitute a large group of flying vehicles. Such vehicles are capable of vertical take-off and landing, hovering, and performing precise, slow maneuvers, which gives them an advantage over fixed wing aircraft. However, the efficiency of energy consumption for such systems is significantly lower. Therefore, the problem of energy consumption optimization is of interest to research centers around the world [
1,
2,
3,
4,
5]. The most popular E-VTOL configuration is a quadcopter because of its relative simplicity to design, build, and control [
6,
7]; therefore, this configuration most often appears in the research results concerning E-VTOL energy consumption [
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23] focusing on physics-based and experiment-based energy consumption models. There is a research niche in the field of energy consumption optimization concerning a small group of E-VTOL systems designed as helicopters. Due to their design, these vehicles’ levels of energy consumption are high, and control is quite complicated compared to other types of rotorcrafts such as quadcopters. However, their design enables the construction of both a micro- and macro-sized rotorcraft in terms of the carried payload, which gives them a definite advantage over other types of rotorcrafts. Currently, many studies related to helicopters are being conducted by helicopter companies and research institutions. The objective of such research is the improvement of helicopters’ flight performance via the optimization of rotor characteristics, the minimization of energy consumption, and the introduction of new helicopter configurations, i.e., compound helicopters (with additional lifting surfaces and propellers) [
24,
25,
26,
27,
28,
29,
30,
31,
32,
33,
34]. Most of these studies address micro electric and macro non-electric helicopters. There is a lack of research results related to small-scale electric helicopters in the literature. Therefore, research programs addressing small electric helicopters of the classic configuration have been established at the Warsaw University of Technology. One of these is aimed at energy consumption analysis, which can be helpful in the design of a helicopter in terms of improving flight characteristics such as range, flight duration, and payload. In the classic configuration, the main and tail rotors are powered by electric motors, which provide lift, thrust, and control of the helicopter, resulting in a significant usage of electric power. In addition, all of the onboard systems are usually electric-powered. In a classic (non-hybrid) electrically powered helicopter, the only source of energy is a battery. So, the helicopter’s performance can be improved by optimizing energy management and the operation of the electric motor and the entire power system. Therefore, from the point of view of mission efficiency and duration, the optimization of helicopter energy consumption is an important task [
35,
36] and constitutes part of the worldwide trend of building green aircraft.
A helicopter is an aircraft whose flight is enabled by controlling the vectors of forces and moments generated by the main and tail rotors at a constant rotation speed or RPM (revolutions per minute). Such a design facilitates the construction of aircraft with VTOL characteristics of a greater weight and size than in the case of a multirotor configuration such as a quadrotor [
37]. In UAV helicopters, both the flight and energy characteristics depend on the efficiency of the rotor set and the electric motor. The RPM of the main rotor is a factor that has a major impact on the flight and control characteristics of the helicopter and the energy consumption during steady flight and maneuvering. An appropriate value of the RPM can contribute to the efficient use of energy stored on board the helicopter and thus to its effective use. However, it should be noted that the variation of the RPM also affects flight characteristics and control characteristics, which may impede the performance of a particular flight task. Therefore, it is necessary to study the effect of the RPM of the main rotor on the energy use and control performance of the helicopter during typical flight phases and maneuvers [
38]. Thus, a complex mathematical model of a helicopter that considers the dynamic characteristics of the rotor set, the propulsion system, and the fuselage needs to be developed. It is also important to design an automatic flight control system that will enable the performance of simulation tests in selected flight states of the helicopter.
The method and comprehensiveness of helicopter motion modelling depend on requirements that are based on the purpose for which the helicopter model will be used [
39]. In this regard, the helicopter model is designed to analyze the helicopter’s motion (flight dynamics), its energy consumption, and applied control laws. To obtain a high trust level (reliability) of the model, the dynamic, aerodynamic, and kinematic properties of the modelled helicopter (which can generally be divided into fuselage, rotors, empennage, engine, transmission, control system, and landing gear) have to be taken into account based on accurate helicopter characteristics (geometric, inertial, and aerodynamic) [
40]. The reliability of the designed helicopter model depends on its proper validation, which is usually performed by comparing the simulation and flight tests results. Apart from in-house helicopter models, usually, two rotorcraft modelling environments are used: CAMRAD and FLIGHTLAB.
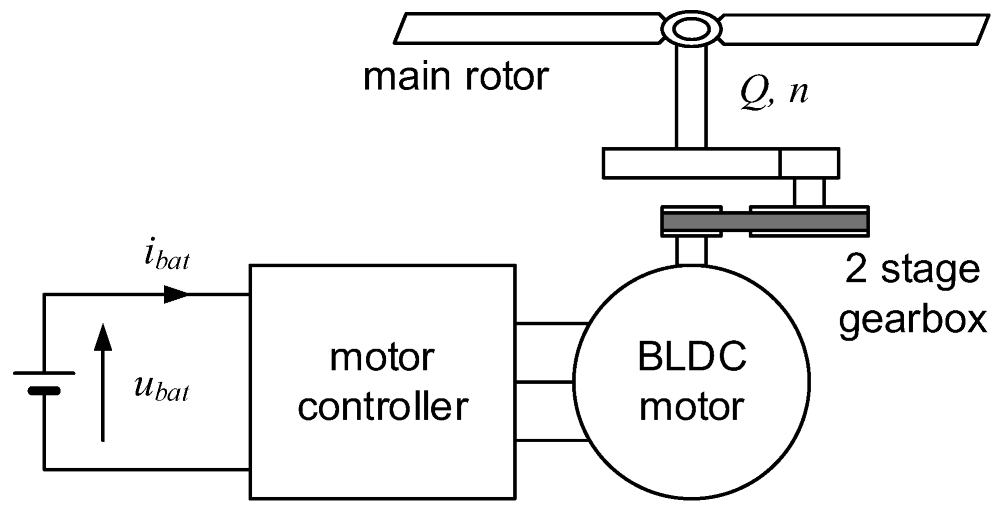
The modelling of UAV electric propulsion systems’ energy consumption and this parameter’s optimization constitute an important research topic [
41,
42]. In general, UAV electric propulsion systems comprise a source of power, an electric drive, and a propeller (rotor). UAV helicopters are additionally equipped with a transmission system. The manner of an electric propulsion system’s optimization depends on the task for which it is needed (e.g., the design parameters, cost, or mission parameters) [
43,
44,
45,
46,
47]. While for the vast majority of multi-copter systems control is achieved by changing solely the angular velocities of the rotors, helicopters are designed to change both the angular velocities of their rotors and the blade pitch angles, which influences the characteristics of the rotors’ energy consumption [
48,
49,
50,
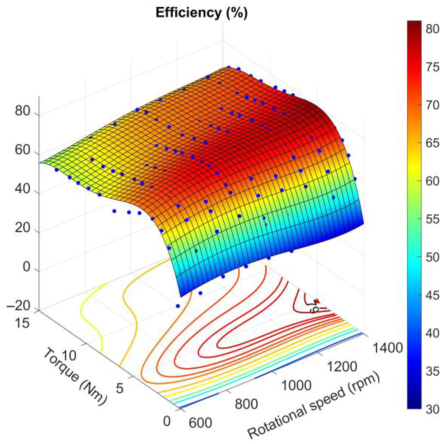
51]. Moreover, the minimum-power operating point of a rotor and the point of maximum transmission efficiency are divergent, and the points of minimum fuel consumption and minimum mechanical power are not met at the same operating point [
52]. Therefore, a reliable energy consumption model of a helicopter propulsion system is needed to analyze a helicopter’s energy consumption during different flight tasks.
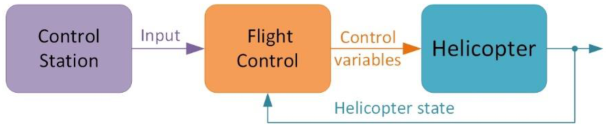
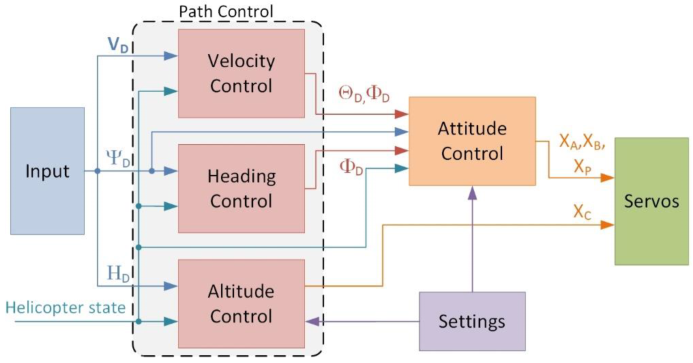
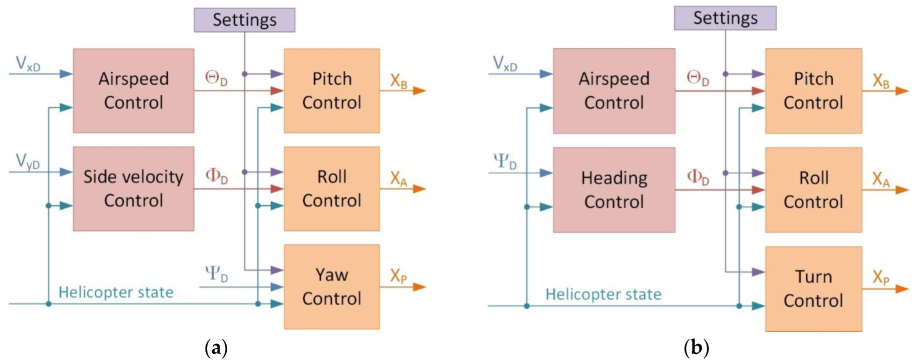
A UAV helicopter requires the use of an automatic flight control system that ensures stable flight along a planned route. During a typical flight route, two typical flight phases and three maneuvers can be distinguished. The two main flight phases are hovering at a constant altitude and cruise flying at a constant speed and altitude. The typical maneuvers are acceleration, climb, and banked (coordinated) turns. In order to conduct simulation tests in these flight states, an automatic control system has been developed. Its control laws were designed for a single RPM value. It is also possible to use adaptive control laws to obtain the optimal system settings for any RPM value. However, due to the objectives of this research, it was decided not to use such laws. This approach will facilitate a more accurate analysis of the degradation of the control characteristics caused by RPM variation.
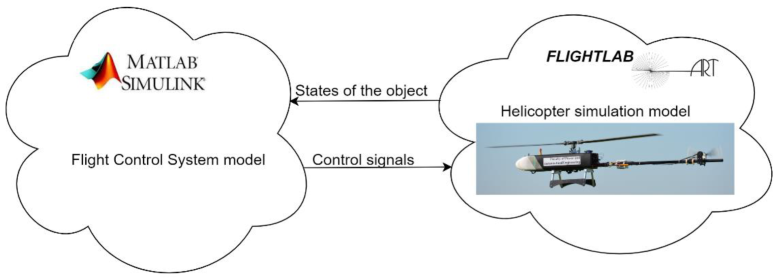
The aim of the present work is to analyze the energy efficiency of a UAV helicopter. A six-degree-of-freedom nonlinear model of the electric-powered ARCHER helicopter with a dedicated electrical energy consumption model is used to analyze the energy consumption during different flight conditions, main rotor RPM values, and flight control system settings. The energy consumption of the electric motor of the main rotor is the subject of this work because it is the main consumer of electrical energy. This system is mainly responsible for generating the aerodynamic forces and moments needed for a helicopter’s flight and control. The helicopter model was built using the FLIGHTLAB software and validated during flight tests. A dedicated automatic flight control system (AFCS) was developed in the MATLAB/Simulink environments to simulate the helicopter missions in a repeatable way, thereby enabling the benchmarking of energy consumption. The results show that reducing the RPM value results in a decrease in energy consumption up to about 20% relative to the nominal value. However, this results in a significant degradation in control performance. For small RPM values, steady horizontal flight is possible but turning is problematic. In contrast, increasing the value of the RPM does not affect the control performance but increases energy consumption. In addition, the increase in energy consumption during a maneuver depends mainly on its duration. So, each maneuver requires additional energy compared to steady state flight. The presented results are an important contribution to the development of small, unmanned helicopters and to research on optimizing their energy consumption. Such helicopters can be used both in mission planning and in the design of new helicopters. The presented energy consumption model and the method of its development can be successfully used in the design of electric propulsion systems for a single-rotor helicopter of the classic configuration.
The organization of the paper is as follows. In
Section 2.1, the ARCHER helicopter’s numerical model, which was developed using the FLIGHTLAB software, is described. In
Section 2.2, the model of electrical energy consumption is presented. In
Section 2.3, the AFCS is described in detail. Then, in
Section 3, test cases showing the energy consumption of the ARCHER helicopter during different flight conditions are analyzed. The paper ends with conclusions and a description of future research.
4. Conclusions
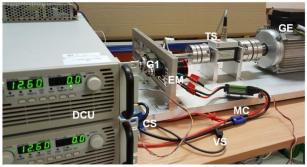
An energy consumption analysis of a UAV helicopter is presented in this paper. The dedicated simulation testbed developed in the combined FLIGHTLAB/MATLAB/Simulink environment was used to simulate and analyze energy consumption for different flight conditions and system settings. The model of the ARCHER helicopter was built using the FLIGHTLAB software and validated using the flight test data. The automatic flight control system was designed using MATLAB/Simulink software and allowed for the simulation of the helicopter’s autonomous flight in all flight conditions and maneuvers. The advanced model of energy consumption that includes the electric motor, gear, and main rotor characteristics was designed, validated using a laboratory test bed, and used in this research.
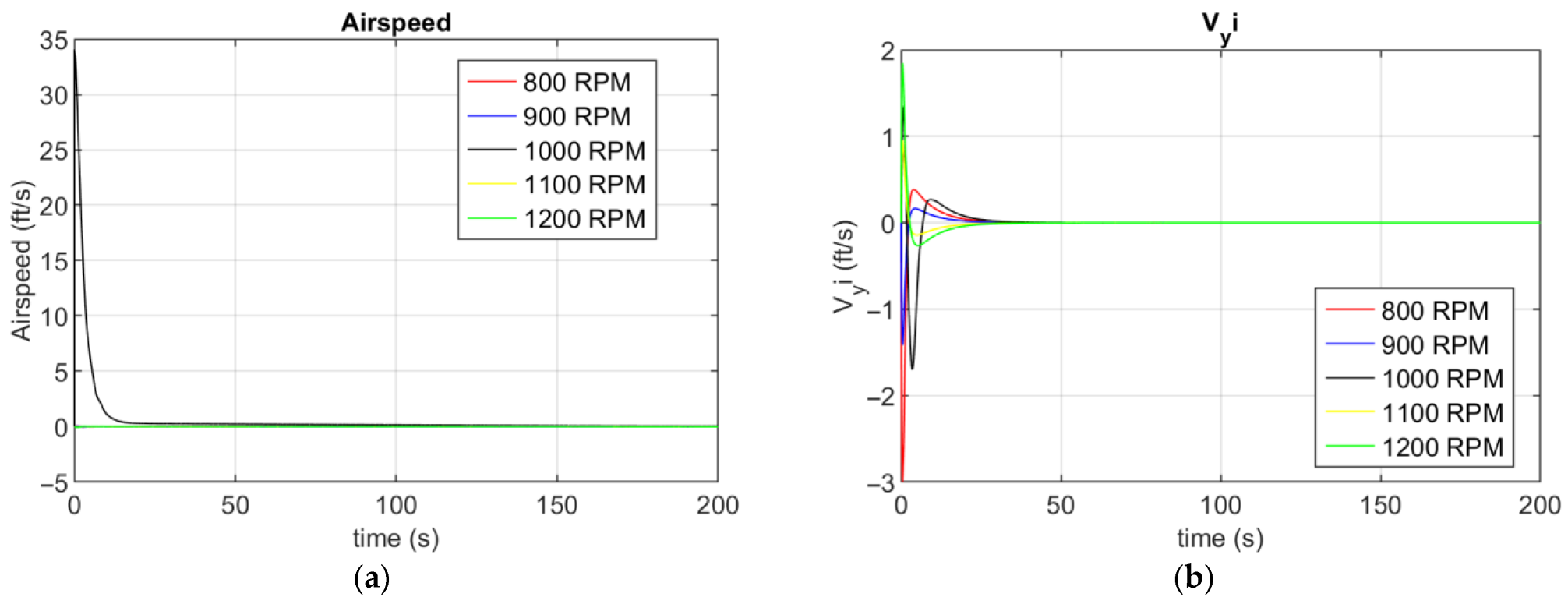
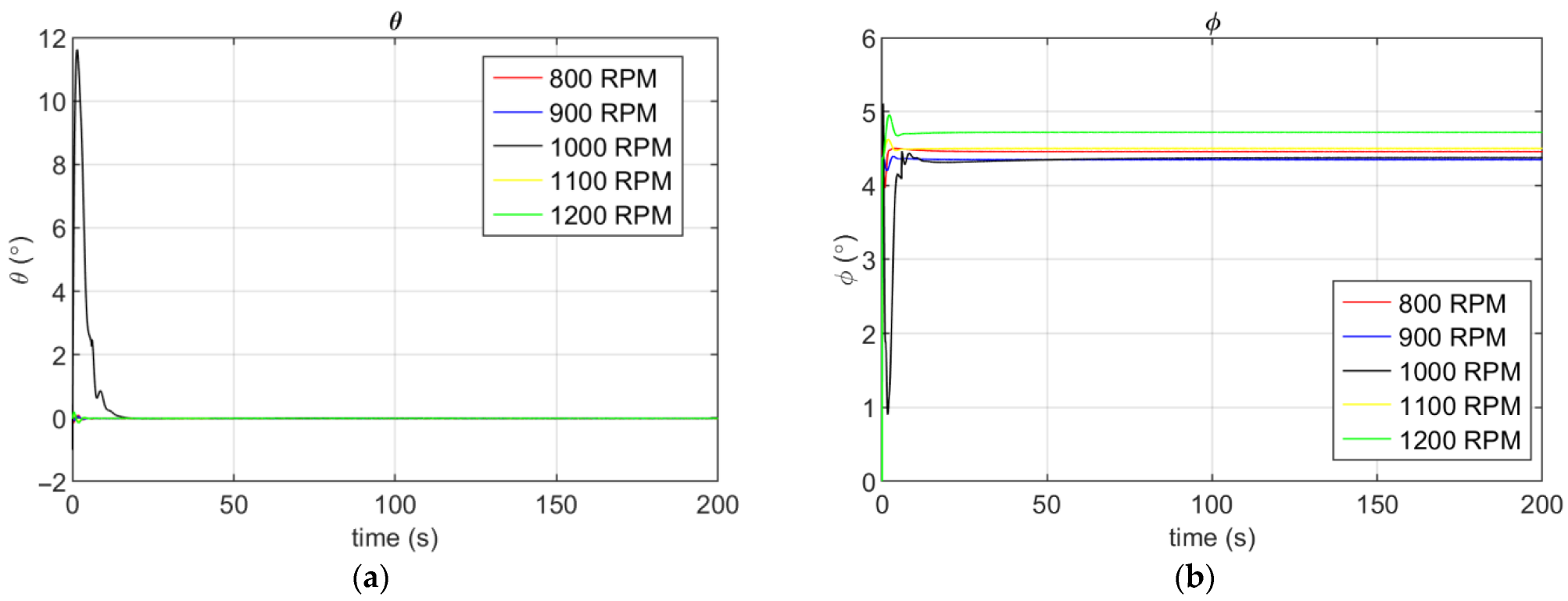
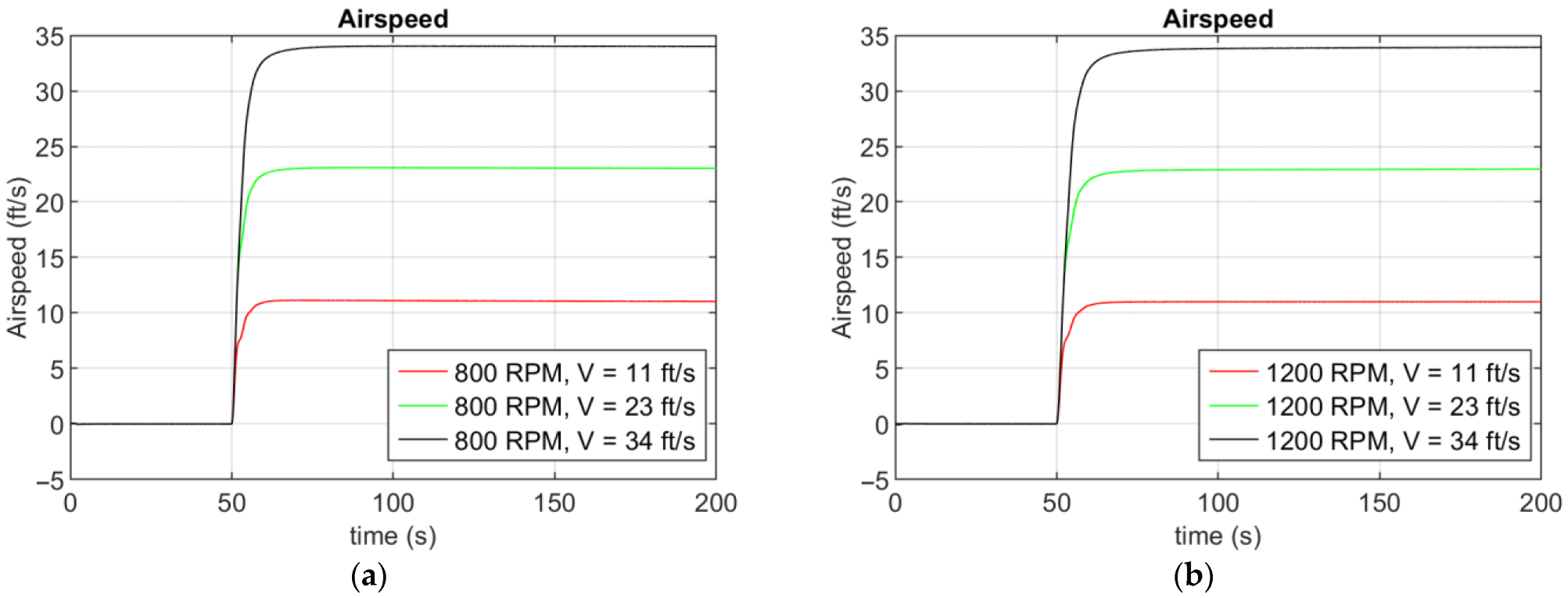
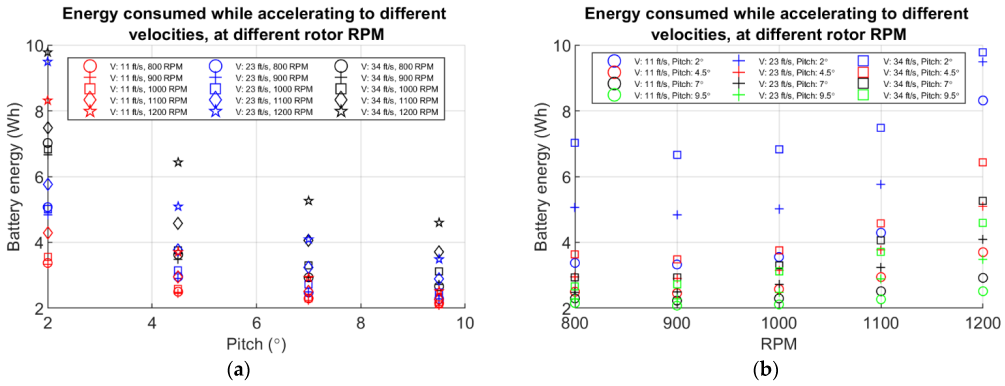
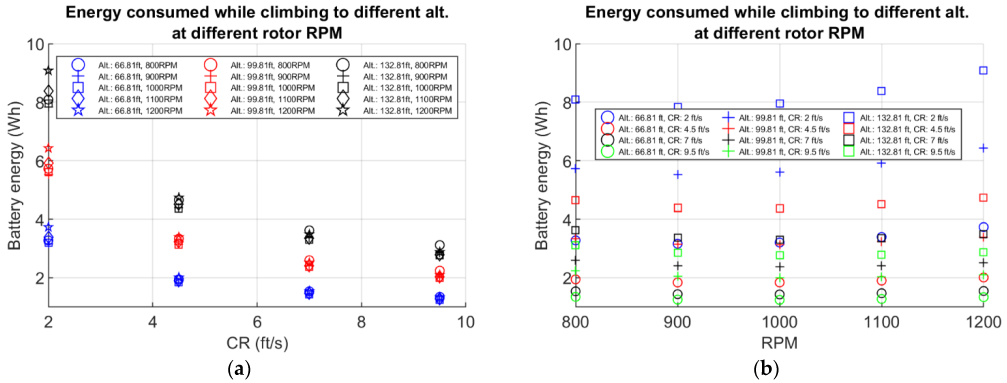
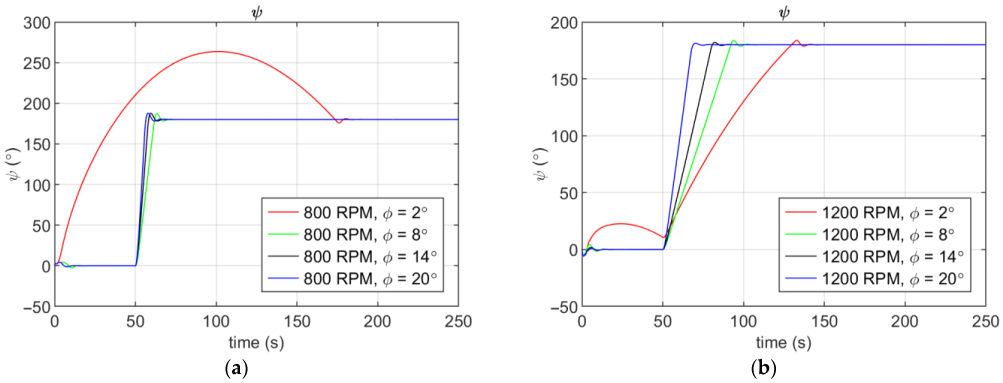
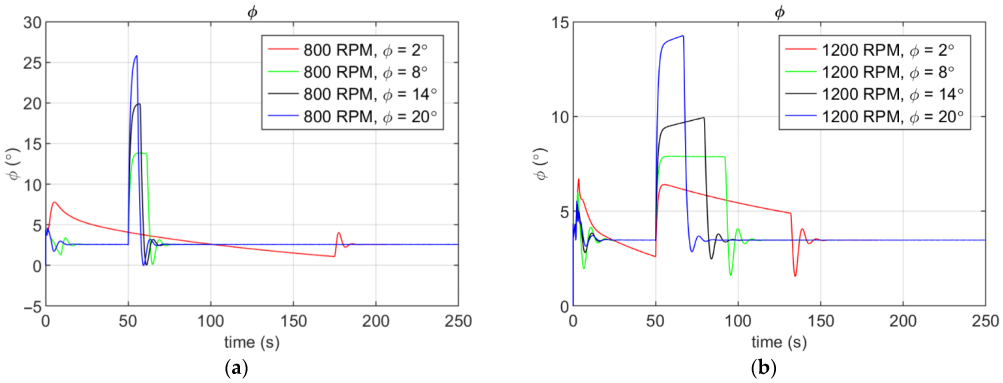
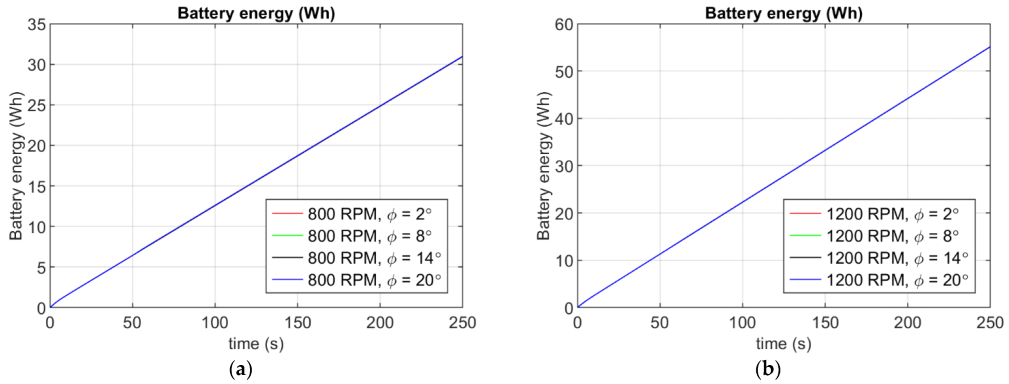
The objective of the simulation tests was to investigate the effect of the main rotor RPM and automatic flight control system settings on the energy consumption while accounting for the degradation of the control qualities. The results showed that a helicopter’s energy consumption strongly depends on the main rotor RPM and the flight speed. Lower energy was used when the helicopter flew around the cruise velocity of 34 ft/s. A lower RPM resulted in lower energy consumption but also reduced the helicopter’s controllability in some maneuvers and AFCS settings. The results suggest the possibility of adjusting the main rotor RPM to actual flight conditions in order to reduce energy consumption throughout a flight. However, it is necessary to use an adaptive control system to take full advantage of RPM variability. The time domain analysis of the simulation results indicated its good capability for estimating helicopter energy consumption and usefulness for mission plan optimization. The scientific significance of this work is that the research results can be used for the development of small, unmanned helicopters of a classic configuration. A detailed analysis of the economic and ecological potential of these types of aircraft will allow for their wider commercial use in areas where other types of rotorcraft are less effective or cannot be used. It is envisaged that such research would be useful for detailed mission planning (considering each particular maneuver) and the optimization of new helicopters and automatic flight control system designs. The presented complex energy consumption model and large set of simulation data added in the
Supplementary Materials, which are not found in the earlier literature, will be helpful for the development of new UAV helicopter designs in accordance with the green aircraft concept.
Further research may concentrate on simulation tests under various environmental conditions to estimate the practical range of RPM variation with wind and turbulence. Moreover, the simulation test bed could be expanded to include the ability to test real autopilots using the HIL method, which would enable optimal autopilot alignment with a given helicopter.



 ,
, 

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}