

A Global Tracking Sensorless Adaptive PI-PBC Design for Output Voltage Regulation in a Boost Converter Feeding a DC Microgrid

 ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
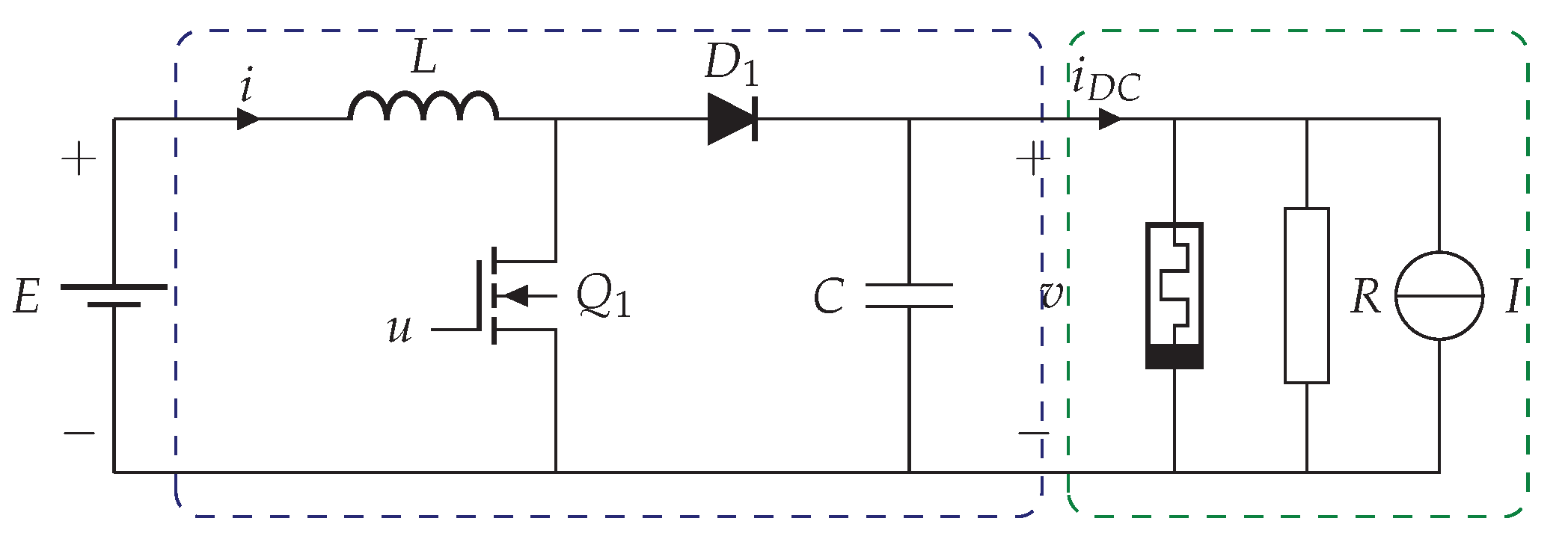
- The application of the PI-PBC design to regulate the output voltage in a boost converter feeding an unknown DC load that represents the possible consumption in a DC microgrid with constant current, resistance, and power loads, which is modeled as a DC load current.
- The integration of two external input estimators to the PI-PBC design, both with exponential convergence, allows one to find the expected values for the DC load current (immersion & invariance (I&I) method) and the voltage input (disturbance–observer (DO) approach), which makes our proposed control approach an adaptive- and sensorless-based design.
2. Mathematical Modeling and Problem Formulation
2.1. Dynamical Modeling and Equilibrium Point
2.2. General Control Problem Definition
- To obtain a general feedback control law that allows for stabilizing of the output voltage to its desired reference , thereby ensuring closed-loop stability and fast convergence.
- To determine the expected value of the load current using an estimator with exponential convergence. The values of the constant resistance, power, and current that compose the loads are unknown, and these are impossible to calculate or estimate since they depend on the DC microgrid connected to the boost converter. The estimator of the load current will make the proposed controller work under a sensorless concept.
- To apply a disturbance–observer estimator to determine the expected value of the voltage source E with exponential convergence that permits one to obtain a sensorless-based controller approach.
3. Passivity-Based Control Theory
3.1. PI-PBC Design
- Due to the skew-symmetric properties of the interconnection matrix, i.e., , then, the component is zero;
- Taking into account that for bilinear systems, and defining the passive output as , then, (12) can be simplified as follows:
3.2. Application to the Boost Converter
4. Sensorless Adaptive Design
4.1. Estimation of the DC Load Current: Adaptive Control Design
4.2. Voltage Input Estimation
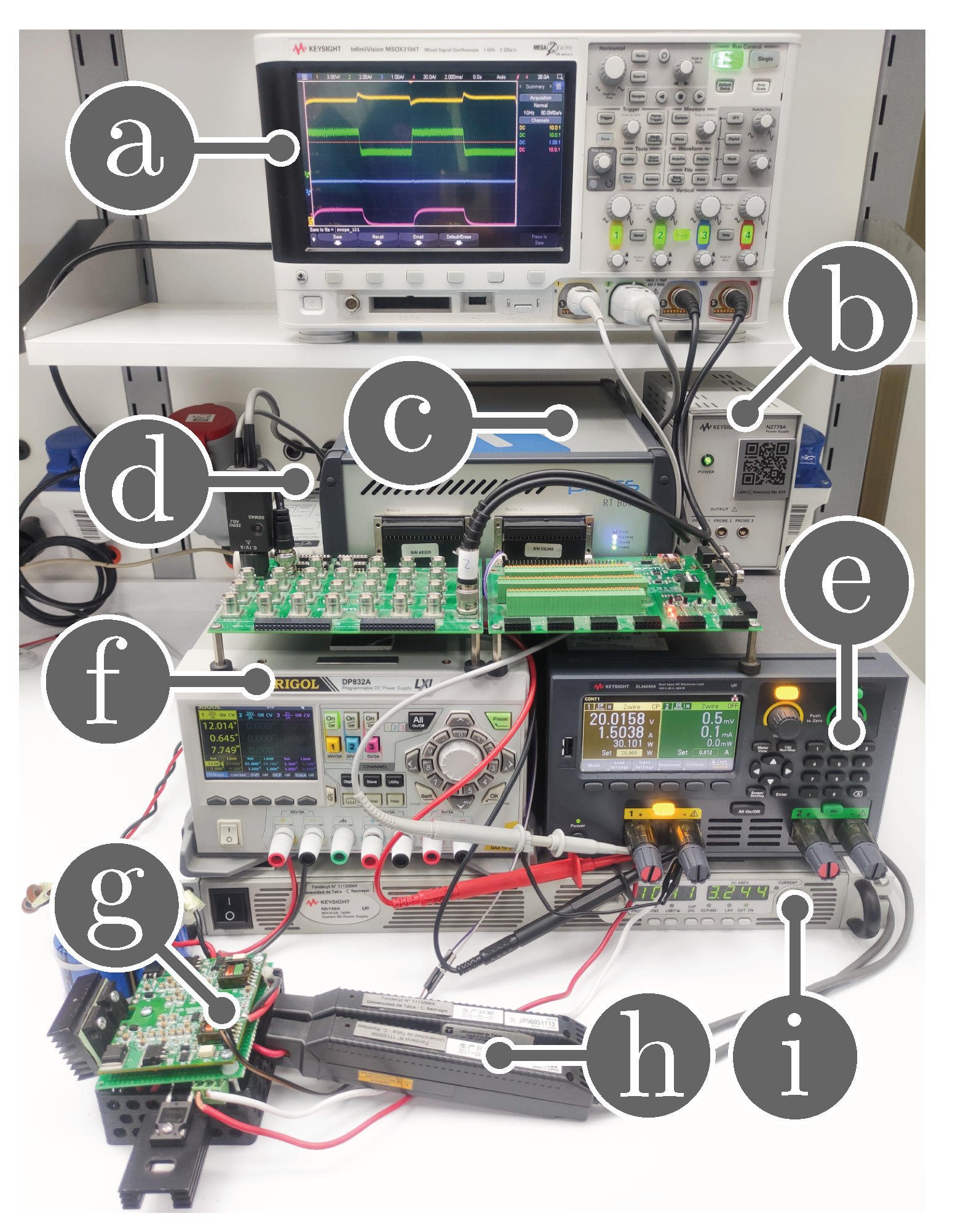
5. Analysis and Experimental Results
5.1. Simulation Results
5.2. Effect of the Estimate
5.3. Performance of the Adaptive Proposed Controller
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lakshmi, S.; Ganguly, S. Transition of Power Distribution System Planning from Passive to Active Networks: A State-of-the-Art Review and a New Proposal. In Sustainable Energy Technology and Policies; Springer: Singapore, 2017; pp. 87–117. [Google Scholar] [CrossRef]
- Tang, Z.; Liu, T.; Zhang, C.; Zheng, Y.; Hill, D.J. Distributed Control of Active Distribution Networks for Frequency Support. In Proceedings of the 2018 Power Systems Computation Conference (PSCC), Dublin, Ireland, 11–15 June 2018. [Google Scholar] [CrossRef]
- Afonso, J.L.; Tanta, M.; Pinto, J.G.O.; Monteiro, L.F.C.; Machado, L.; Sousa, T.J.C.; Monteiro, V. A Review on Power Electronics Technologies for Power Quality Improvement. Energies 2021, 14, 8585. [Google Scholar] [CrossRef]
- Sekar, R.; Suresh, D.S.; Naganagouda, H. A review on power electronic converters suitable for renewable energy sources. In Proceedings of the 2017 International Conference on Electrical, Electronics, Communication, Computer, and Optimization Techniques (ICEECCOT), Mysuru, India, 15–16 December 2017. [Google Scholar] [CrossRef]
- Şahin, M.E.; Blaabjerg, F. A Hybrid PV-Battery/Supercapacitor System and a Basic Active Power Control Proposal in MATLAB/Simulink. Electronics 2020, 9, 129. [Google Scholar] [CrossRef]
- Lee, G.J. Superconductivity Application in Power System. In Applications of High-Tc Superconductivity; InTech: London, UK, 2011. [Google Scholar] [CrossRef]
- Giraldo, E.; Garces, A. An Adaptive Control Strategy for a Wind Energy Conversion System Based on PWM-CSC and PMSG. IEEE Trans. Power Syst. 2014, 29, 1446–1453. [Google Scholar] [CrossRef]
- Grisales-Noreña, L.F.; Ramos-Paja, C.A.; Gonzalez-Montoya, D.; Alcalá, G.; Hernandez-Escobedo, Q. Energy Management in PV Based Microgrids Designed for the Universidad Nacional de Colombia. Sustainability 2020, 12, 1219. [Google Scholar] [CrossRef]
- Magaldi, G.L.; Serra, F.M.; de Angelo, C.H.; Montoya, O.D.; Giral-Ramírez, D.A. Voltage Regulation of an Isolated DC Microgrid with a Constant Power Load: A Passivity-based Control Design. Electronics 2021, 10, 2085. [Google Scholar] [CrossRef]
- Gavriluta, C.; Candela, I.; Citro, C.; Luna, A.; Rodriguez, P. Design considerations for primary control in multi-terminal VSC-HVDC grids. Electr. Power Syst. Res. 2015, 122, 33–41. [Google Scholar] [CrossRef]
- Rakhshani, E.; Remon, D.; Cantarellas, A.; Garcia, J.M.; Rodriguez, P. Modeling and sensitivity analyses of VSP based virtual inertia controller in HVDC links of interconnected power systems. Electr. Power Syst. Res. 2016, 141, 246–263. [Google Scholar] [CrossRef]
- Bacha, S.; Munteanu, I.; Bratcu, A.I. Power Electronic Converters Modeling and Control; Springer: London, UK, 2014. [Google Scholar] [CrossRef]
- Martinez-Treviño, B.A.; El Aroudi, A.; Vidal-Idiarte, E.; Cid-Pastor, A.; Martinez-Salamero, L. Sliding-mode control of a boost converter under constant power loading conditions. IET Power Electron. 2019, 12, 521–529. [Google Scholar] [CrossRef]
- Hamidi, S.A.; Nasiri, A. Stability analysis of a DC-DC converter for battery energy storage system feeding CPL. In Proceedings of the 2015 IEEE International Telecommunications Energy Conference (INTELEC), Osaka, Japan, 18–22 October 2015; pp. 1–5. [Google Scholar]
- Singh, S.; Fulwani, D.; Kumar, V. Robust sliding-mode control of dc/dc boost converter feeding a constant power load. IET Power Electron. 2015, 8, 1230–1237. [Google Scholar] [CrossRef]
- Wu, J.; Lu, Y. Adaptive backstepping sliding mode control for boost converter with constant power load. IEEE Access 2019, 7, 50797–50807. [Google Scholar] [CrossRef]
- He, W.; Li, S.; Yang, J.; Wang, Z. Incremental passivity based control for DC-DC boost converter with circuit parameter perturbations using nonlinear disturbance observer. In Proceedings of the IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 1353–1358. [Google Scholar]
- He, W.; Li, S.; Yang, J.; Wang, Z. Incremental passivity-based control for DC-DC boost converters under time-varying disturbances via a generalized proportional integral observer. J. Power Electron. 2018, 18, 147–159. [Google Scholar]
- Farsizadeh, H.; Gheisarnejad, M.; Mosayebi, M.; Rafiei, M.; Khooban, M.H. An intelligent and fast controller for DC/DC converter feeding CPL in a DC microgrid. IEEE Trans. Circuits Syst. II Express Briefs 2019, 67, 1104–1108. [Google Scholar] [CrossRef]
- He, W.; Shang, Y. Finite-Time Parameter Observer-Based Sliding Mode Control for a DC/DC Boost Converter with Constant Power Loads. Electronics 2022, 11, 819. [Google Scholar] [CrossRef]
- Serra, F.M.; Magaldi, G.L.; Fernandez, L.M.; Larregay, G.O.; CH, D.A. IDA-PBC controller of a DC-DC boost converter for continuous and discontinuous conduction mode. IEEE Lat. Am. Trans. 2018, 16, 52–58. [Google Scholar] [CrossRef]
- Zhang, X.; He, W.; Zhang, Y. An Adaptive Output Feedback Controller for Boost Converter. Electronics 2022, 11, 905. [Google Scholar] [CrossRef]
- Zhang, X.; Martinez-Lopez, M.; He, W.; Shang, Y.; Jiang, C.; Moreno-Valenzuela, J. Sensorless Control for DC–DC Boost Converter via Generalized Parameter Estimation-Based Observer. Appl. Sci. 2021, 11, 7761. [Google Scholar] [CrossRef]
- Gil-González, W.; Montoya, O.D.; Espinosa-Perez, G. Adaptive control for second-order DC–DC converters: PBC approach. In Modeling, Operation, and Analysis of DC Grids; Elsevier: Amsterdam, The Netherlands, 2021; pp. 289–310. [Google Scholar]
- Zhang, M.; Borja, P.; Ortega, R.; Liu, Z.; Su, H. PID Passivity-Based Control of Port-Hamiltonian Systems. IEEE Trans. Autom. Control. 2018, 63, 1032–1044. [Google Scholar] [CrossRef]
- Ortega, R.; García-Canseco, E. Interconnection and Damping Assignment Passivity-Based Control: A Survey. Eur. J. Control. 2004, 10, 432–450. [Google Scholar] [CrossRef]
- Ortega, R.; van der Schaft, A.; Castanos, F.; Astolfi, A. Control by Interconnection and Standard Passivity-Based Control of Port-Hamiltonian Systems. IEEE Trans. Autom. Control. 2008, 53, 2527–2542. [Google Scholar] [CrossRef]
- He, W.; Soriano-Rangel, C.A.; Ortega, R.; Astolfi, A.; Mancilla-David, F.; Li, S. Energy shaping control for buck–boost converters with unknown constant power load. Control. Eng. Pract. 2018, 74, 33–43. [Google Scholar] [CrossRef]
- Serra, F.M.; Angelo, C.H.D.; Forchetti, D.G. IDA-PBC control of a DC–AC converter for sinusoidal three-phase voltage generation. Int. J. Electron. 2016, 104, 93–110. [Google Scholar] [CrossRef]
- Serra, F.M.; Angelo, C.H.D.; Forchetti, D.G. Interconnection and damping assignment control of a three-phase front end converter. Int. J. Electr. Power Energy Syst. 2014, 60, 317–324. [Google Scholar] [CrossRef]
- Montoya, O.D.; Serra, F.M.; Gil-González, W.; Asensio, E.M.; Bosso, J.E. An IDA-PBC Design with Integral Action for Output Voltage Regulation in an Interleaved Boost Converter for DC Microgrid Applications. Actuators 2021, 11, 5. [Google Scholar] [CrossRef]
- Cisneros, R.; Pirro, M.; Bergna, G.; Ortega, R.; Ippoliti, G.; Molinas, M. Global tracking passivity-based PI control of bilinear systems: Application to the interleaved boost and modular multilevel converters. Control. Eng. Pract. 2015, 43, 109–119. [Google Scholar] [CrossRef]
- Cisneros, R.; Ortega, R.; Pirro, M.; Ippoliti, G.; Bergna, G.; Cabrera, M.M. Global tracking passivity-based PI control for power converters: An application to the boost and modular multilevel converters. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014. [Google Scholar] [CrossRef]
- Malekzadeh, M.; Khosravi, A.; Tavan, M. An immersion and invariance based input voltage and resistive load observer for DC–DC boost converter. SN Appl. Sci. 2019, 2, 1–13. [Google Scholar] [CrossRef]
- Zhang, Z.; Song, G.; Zhou, J.; Zhang, X.; Yang, B.; Liu, C.; Guerrero, J.M. An adaptive backstepping control to ensure the stability and robustness for boost power converter in DC microgrids. Energy Rep. 2022, 8, 1110–1124. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Description | Type/Value |
|---|---|---|
| Power MOSFET | IRFB4110 | |
| Schottky Power Diode | RURG8060 | |
| L | Inductor | Wurth Elektronik 74435584700, 47 H |
| C | Multilayer Ceramic Capacitor | TDK C5750X7S2A106M230KB, F |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gil-González, W.; Montoya, O.D.; Riffo, S.; Restrepo, C.; Muñoz, J. A Global Tracking Sensorless Adaptive PI-PBC Design for Output Voltage Regulation in a Boost Converter Feeding a DC Microgrid. Energies 2023, 16, 1106. https://doi.org/10.3390/en16031106
Gil-González W, Montoya OD, Riffo S, Restrepo C, Muñoz J. A Global Tracking Sensorless Adaptive PI-PBC Design for Output Voltage Regulation in a Boost Converter Feeding a DC Microgrid. Energies. 2023; 16(3):1106. https://doi.org/10.3390/en16031106
Chicago/Turabian StyleGil-González, Walter, Oscar Danilo Montoya, Sebastián Riffo, Carlos Restrepo, and Javier Muñoz. 2023. "A Global Tracking Sensorless Adaptive PI-PBC Design for Output Voltage Regulation in a Boost Converter Feeding a DC Microgrid" Energies 16, no. 3: 1106. https://doi.org/10.3390/en16031106
APA StyleGil-González, W., Montoya, O. D., Riffo, S., Restrepo, C., & Muñoz, J. (2023). A Global Tracking Sensorless Adaptive PI-PBC Design for Output Voltage Regulation in a Boost Converter Feeding a DC Microgrid. Energies, 16(3), 1106. https://doi.org/10.3390/en16031106