
An Overview of Flexible Current Control Strategies Applied to LVRT Capability for Grid-Connected Inverters





Abstract
1. Introduction
2. LVRT Considerations
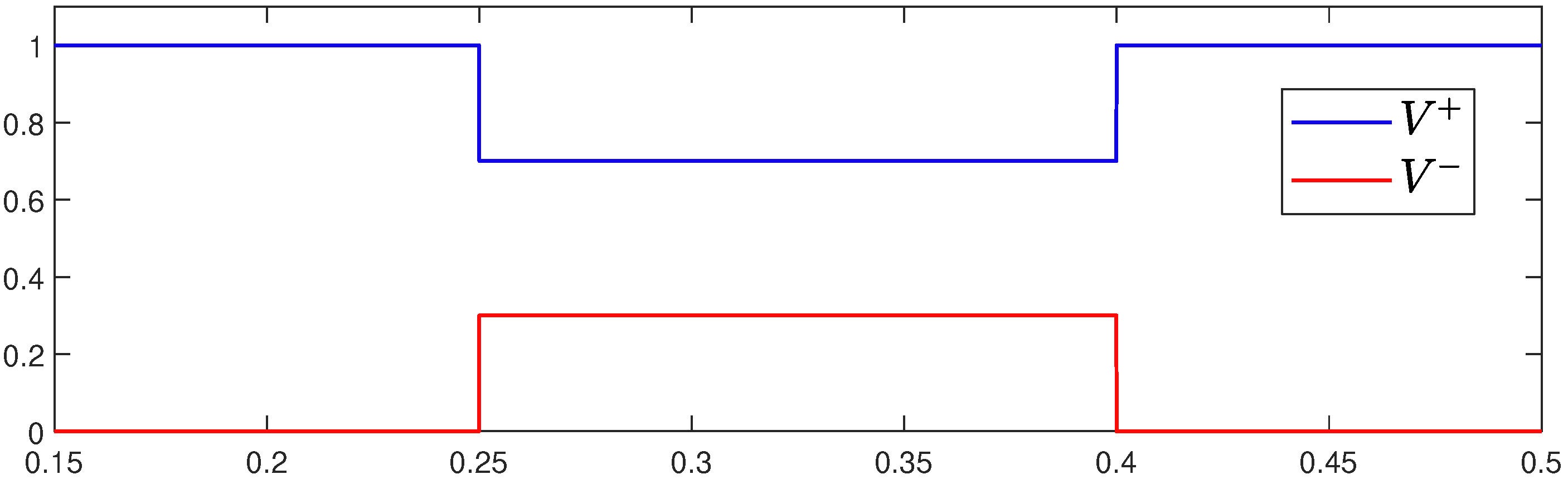
2.1. Voltage Sags
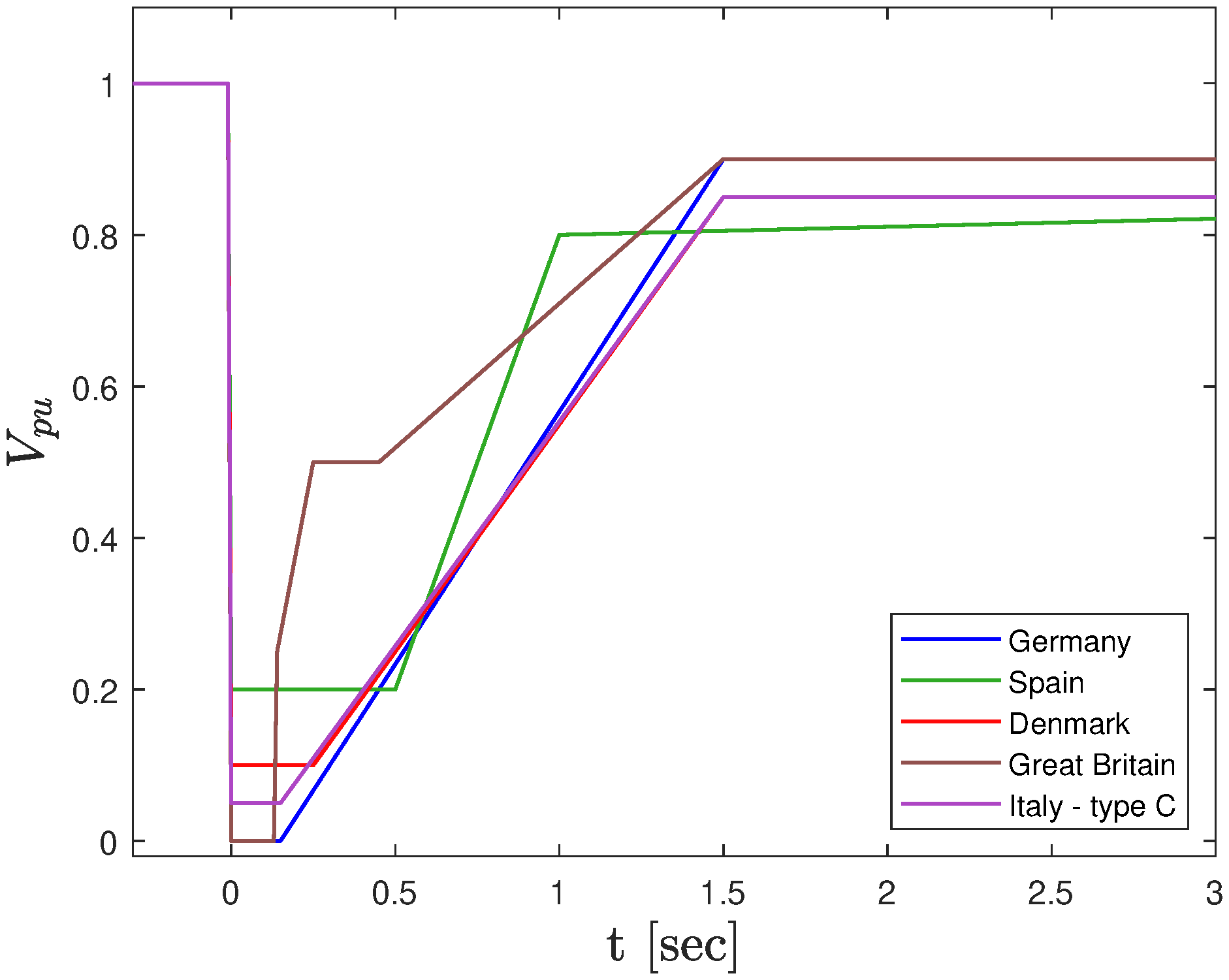
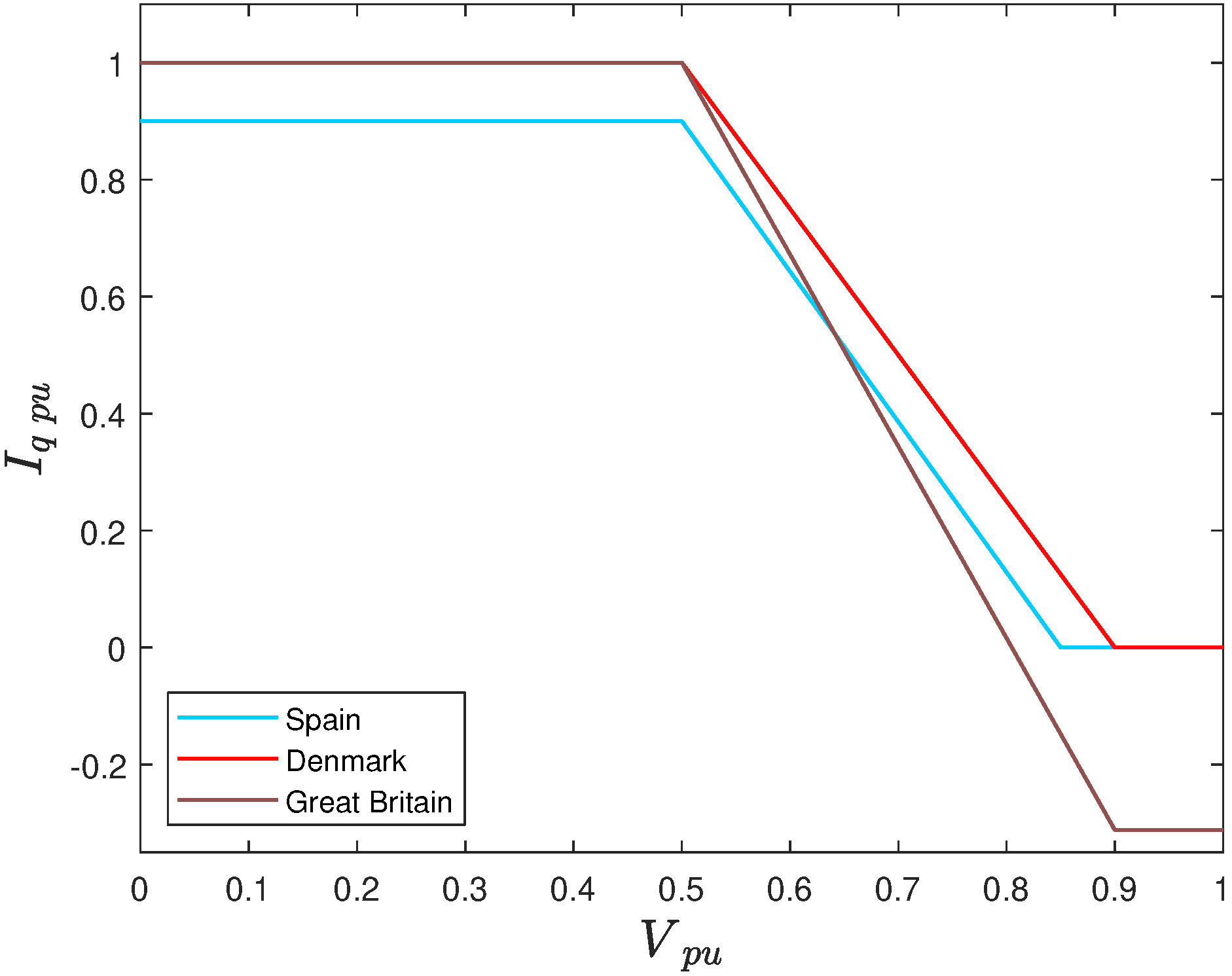
2.2. Grid Code Requirements
2.3. Voltage Support Strategies and Secondary Objectives
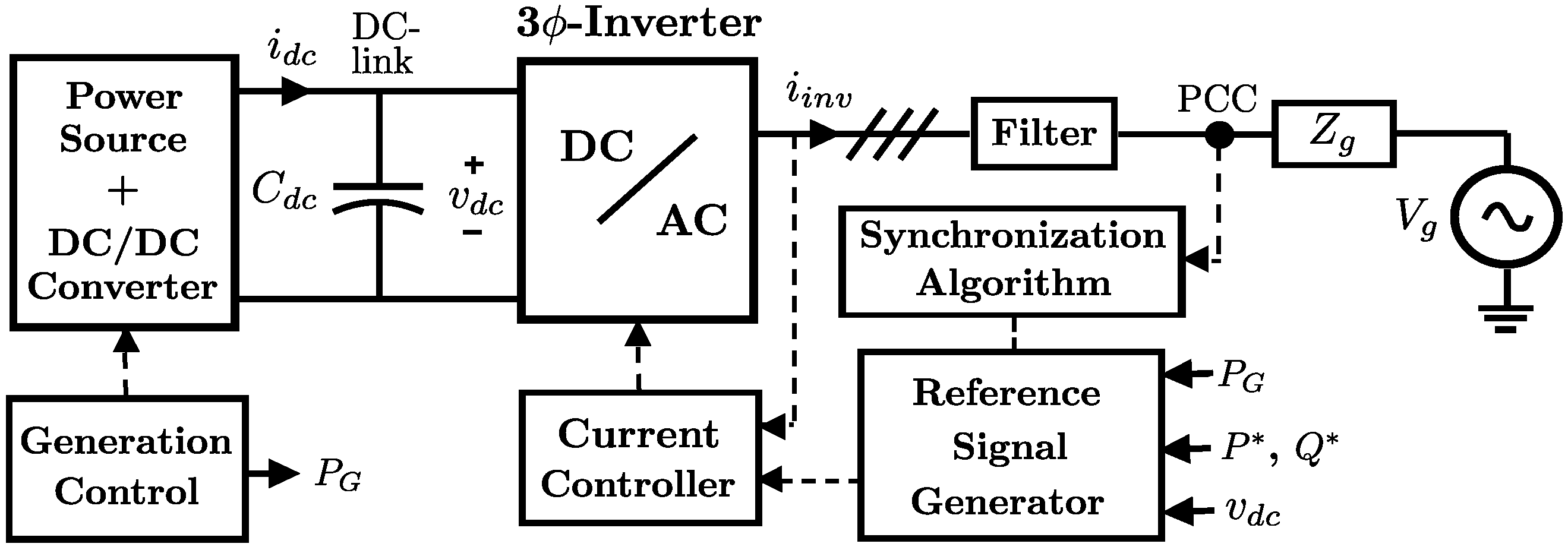
3. System Description
3.1. Grid-Connected Inverter
3.2. Control Loops
4. Flexible Current Control Algorithms
4.1. Basic Formulation
4.2. Fundamental Concepts of Flexible Control
- Instantaneous Active Reactive Control (IARC);
- Instantaneously Controlled Positive-Sequence (ICPS);
- Positive-Negative-Sequence Compensation (PNSC);
- Average Active-Reactive Control (AARC);
- Balanced Positive-Sequence Control (BPSC).
5. Current State of Art
6. Design of an LVRT Flexible Current Algorithm
6.1. Scalar Factor Definition
6.2. Injected Powers
6.3. Voltage Support Strategy
6.4. System Restrictions
6.4.1. Maximum Current Limitation
6.4.2. Maximum Voltage Limitation
6.4.3. Maximum DC-Link Voltage
6.5. Secondary Objectives
6.6. Summary
7. Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Blaabjerg, F.; Yang, Y.; Yang, D.; Wang, X. Distributed Power-Generation Systems and Protection. Proc. IEEE 2017, 105, 1311–1331. [Google Scholar] [CrossRef]
- Ufa, R.; Malkova, Y.; Rudnik, V.; Andreev, M.; Borisov, V. A review on distributed generation impacts on electric power system. Int. J. Hydrogen Energy 2022, 47, 20347–20361. [Google Scholar] [CrossRef]
- Chen, X.; Mcelroy, M.B.; Wu, Q.; Shu, Y.; Xue, Y. Transition towards higher penetration of renewables: An overview of interlinked technical, environmental and socio-economic challenges. J. Mod. Power Syst. Clean Energy 2019, 7, 1–8. [Google Scholar] [CrossRef]
- Kundur, P.; Paserba, J.; Vitet, S. Overview on definition and classification of power system stability. In Proceedings of the CIGRE/IEEE PES International Symposium Quality and Security of Electric Power Delivery Systems. CIGRE/PES 2003, Montreal, QC, Canada, 8–10 October 2003; pp. 1–4. [Google Scholar] [CrossRef]
- Peyghami, S.; Palensky, P.; Blaabjerg, F. An Overview on the Reliability of Modern Power Electronic Based Power Systems. IEEE Open J. Power Electron. 2020, 1, 34–50. [Google Scholar] [CrossRef]
- Tse, C.K.; Huang, M.; Zhang, X.; Liu, D.; Li, X.L. Circuits and Systems Issues in Power Electronics Penetrated Power Grid. IEEE Open J. Circuits Syst. 2020, 1, 140–156. [Google Scholar] [CrossRef]
- Zeb, K.; Islam, S.U.; Khan, I.; Uddin, W.; Ishfaq, M.; Curi Busarello, T.D.; Muyeen, S.; Ahmad, I.; Kim, H. Faults and Fault Ride Through strategies for grid-connected photovoltaic system: A comprehensive review. Renew. Sustain. Energy Rev. 2022, 158, 112125. [Google Scholar] [CrossRef]
- Zhang, Z.; Schuerhuber, R.; Fickert, L.; Friedl, K. Study of stability after low voltage ride-through caused by phase-locked loop of grid-side converter. Int. J. Electr. Power Energy Syst. 2021, 129, 106765. [Google Scholar] [CrossRef]
- Özgür, Ç.; Yalman, Y.; Tan, A.; Çağatay Bayındır, K.; Ümit, Ç.; Akdeniz, M.; Chaudhary, S.K.; Høyer, M.; Guerrero, J.M. Grid code requirements—A case study on the assessment for integration of offshore wind power plants in Turkey. Sustain. Energy Technol. Assessments 2022, 52, 102137. [Google Scholar]
- Heydari-doostabad, H.; Khalghani, M.R.; Khooban, M.H. A novel control system design to improve LVRT capability of fixed speed wind turbines using STATCOM in presence of voltage fault. Int. J. Electr. Power Energy Syst. 2016, 77, 280–286. [Google Scholar] [CrossRef]
- Howlader, A.M.; Senjyu, T. A comprehensive review of low voltage ride through capability strategies for the wind energy conversion systems. Renew. Sustain. Energy Rev. 2016, 56, 643–658. [Google Scholar] [CrossRef]
- Tang, C.Y.; Chen, Y.T.; Chen, Y.M. PV Power System With Multi-Mode Operation and Low-Voltage Ride-Through Capability. IEEE Trans. Ind. Electron. 2015, 62, 7524–7533. [Google Scholar] [CrossRef]
- Benali, A.; Khiat, M.; Allaoui, T.; Denaï, M. Power Quality Improvement and Low Voltage Ride Through Capability in Hybrid Wind-PV Farms Grid-Connected Using Dynamic Voltage Restorer. IEEE Access 2018, 6, 68634–68648. [Google Scholar] [CrossRef]
- Guo, X.; Liu, W.; Lu, Z. Flexible Power Regulation and Current-Limited Control of the Grid-Connected Inverter Under Unbalanced Grid Voltage Faults. IEEE Trans. Ind. Electron. 2017, 64, 7425–7432. [Google Scholar] [CrossRef]
- Al-Shetwi, A.Q.; Hannan, M.; Jern, K.P.; Mansur, M.; Mahlia, T. Grid-connected renewable energy sources: Review of the recent integration requirements and control methods. J. Clean. Prod. 2020, 253, 119831. [Google Scholar] [CrossRef]
- Al-Shetwi, A.Q.; Sujod, M.Z.; Blaabjerg, F.; Yang, Y. Fault ride-through control of grid-connected photovoltaic power plants: A review. Sol. Energy 2019, 180, 340–350. [Google Scholar] [CrossRef]
- Talha, M.; Amir, A.; Raihan, S.R.S.; Abd Rahim, N. Grid-connected photovoltaic inverters with low-voltage ride through for a residential-scale system: A review. Int. Trans. Electr. Energy Syst. 2021, 31, e12630. [Google Scholar] [CrossRef]
- Milicua, A.; Abad, G.; Rodríguez Vidal, M.A. Online Reference Limitation Method of Shunt-Connected Converters to the Grid to Avoid Exceeding Voltage and Current Limits Under Unbalanced Operatio—Part I: Theory. IEEE Trans. Energy Convers. 2015, 30, 852–863. [Google Scholar] [CrossRef]
- Sosa, J.L.; Castilla, M.; Miret, J.; Matas, J.; Al-Turki, Y.A. Control Strategy to Maximize the Power Capability of PV Three-Phase Inverters During Voltage Sags. IEEE Trans. Power Electron. 2016, 31, 3314–3323. [Google Scholar] [CrossRef]
- Rodriguez, P.; Timbus, A.V.; Teodorescu, R.; Liserre, M.; Blaabjerg, F. Flexible Active Power Control of Distributed Power Generation Systems During Grid Faults. IEEE Trans. Ind. Electron. 2007, 54, 2583–2592. [Google Scholar] [CrossRef]
- Camacho, A.; Castilla, M.; Miret, J.; Borrell, A.; de Vicuña, L.G. Active and Reactive Power Strategies With Peak Current Limitation for Distributed Generation Inverters During Unbalanced Grid Faults. IEEE Trans. Power Electron. 2015, 62, 1515–1525. [Google Scholar] [CrossRef]
- Afshari, E.; Moradi, G.R.; Rahimi, R.; Farhangi, B.; Yang, Y.; Blaabjerg, F.; Farhangi, S. Control Strategy for Three-Phase Grid-Connected PV Inverters Enabling Current Limitation Under Unbalanced Faults. IEEE Trans. Ind. Electron. 2017, 64, 8908–8918. [Google Scholar] [CrossRef]
- Camacho, A.; Castilla, M.; Miret, J.; Vasquez, J.C.; Alarcon-Gallo, E. Flexible Voltage Support Control for Three-Phase Distributed Generation Inverters Under Grid Fault. IEEE Trans. Ind. Electron. 2013, 60, 1429–1441. [Google Scholar] [CrossRef]
- Jia, J.; Yang, G.; Nielsen, A.H. A Review on Grid-Connected Converter Control for Short-Circuit Power Provision Under Grid Unbalanced Faults. IEEE Trans. Power Del. 2018, 33, 649–661. [Google Scholar] [CrossRef]
- Joshi, J.; Swami, A.K.; Jately, V.; Azzopardi, B. A Comprehensive Review of Control Strategies to Overcome Challenges During LVRT in PV Systems. IEEE Access 2021, 9, 121804–121834. [Google Scholar] [CrossRef]
- IEEE Std 1159-2019 (Revision of IEEE Std 1159-2009); IEEE Recommended Practice for Monitoring Electric Power Quality. IEEE: Piscataway, NJ, USA, 2019; pp. 1–98.
- Bollen, M.H. Understanding Power Quality Problems: Voltage Sags and Interruptions; John Wiley& Sons, Inc: Hoboken, NJ, USA, 2000; pp. 139–251. [Google Scholar]
- Garnica, M.; García de Vicuña, L.; Miret, J.; Camacho, A.; Guzmán, R. Voltage Support Experimental Analysis of a Low-Voltage Ride-Through Strategy Applied to Grid-Connected Distributed Inverters. Energies 2018, 11, 1949. [Google Scholar] [CrossRef]
- Swagata Das, S.S.; Ananthan, S.N. Fault Location on Transmission and Distribution Lines: Principles and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2022; p. 2. [Google Scholar]
- Tleis, N. Power Systems Modelling and Fault Analysis; Academic Press: Cambridge, MA, USA, 2022; p. 12. [Google Scholar]
- Tarafdar Hagh, M.; Khalili, T. A review of fault ride through of PV and wind renewable energies in grid codes. Int. J. Energy Res. 2019, 43, 1342–1356. [Google Scholar] [CrossRef]
- Yadav, M.; Pal, N.; Saini, D.K. Low voltage ride through capability for resilient electrical distribution system integrated with renewable energy resources. Energy Rep. 2023, 9, 833–858. [Google Scholar] [CrossRef]
- Buraimoh, E.; Davidson, I.E. Overview of Fault Ride-Through Requirements for Photovoltaic Grid Integration, Design and Grid Code Compliance. In Proceedings of the 2020 9th International Conference on Renewable Energy Research and Application (ICRERA), Glasgow, UK, 27–30 September 2020; pp. 332–336. [Google Scholar]
- Garnica López, M.A.; García de Vicuña, J.L.; Miret, J.; Castilla, M.; Guzmán, R. Control Strategy for Grid-Connected Three-Phase Inverters During Voltage Sags to Meet Grid Codes and to Maximize Power Delivery Capability. IEEE Trans. Power Electron. 2018, 33, 9360–9374. [Google Scholar] [CrossRef]
- Zheng, Q.; Li, J.; Ai, X.; Wen, J.; Fang, J. Overview of grid codes for photovoltaic integration. In Proceedings of the 2017 IEEE Conference on Energy Internet and Energy System Integration (EI2), Beijing, China, 26–28 November 2017; pp. 1–6. [Google Scholar]
- P.O. 12.3. Requisitos de Respuesta Frente a Huecos de Tensión de las Instalaciones Eólica. Red Eléctrica de España (REE). 2006. Available online: https://www.ree.es/sites/default/files/01_ACTIVIDADES/Documentos/ProcedimientosOperacion/PO_resol_12.3_Respuesta_huecos_eolica.pdf (accessed on 11 January 2023).
- Italian Grid Code-Chapter 1 Section C—Access to the National Transmission Service; Terna Driving Energy: Roma, Italy, 2015.
- Sarkar, M.N.I.; Meegahapola, L.G.; Datta, M. Reactive Power Management in Renewable Rich Power Grids: A Review of Grid-Codes, Renewable Generators, Support Devices, Control Strategies and Optimization Algorithms. IEEE Access 2018, 6, 41458–41489. [Google Scholar] [CrossRef]
- Camacho, A.; Castilla, M.; Miret, J.; de Vicuña, L.G.; Miguel Andrés, G.L. Control Strategy for Distribution Generation Inverters to Maximize the Voltage Support in the Lowest Phase During Voltage Sags. IEEE Trans. Power Electron. 2018, 65, 2346–2355. [Google Scholar] [CrossRef]
- Celik, D.; Meral, M.E. Voltage Support Control Strategy of Grid-connected Inverter System Under Unbalanced Grid Faults to Meet Fault Ride Through Requirements. IET Gener. Transm. Distrib. 2020, 14, 3198–3210. [Google Scholar] [CrossRef]
- Camacho, A.; Castilla, M.; Miret, J.; de Vicuña, L.G.; Guzman, R. Positive and Negative Sequence Control Strategies to Maximize the Voltage Support in Resistive-Inductive Grids During Grid Faults. IEEE Trans. Power Electron. 2018, 33, 5362–5373. [Google Scholar] [CrossRef]
- Duong, M.Q.; Leva, S.; Mussetta, M.; Le, K.H. A Comparative Study on Controllers for Improving Transient Stability of DFIG Wind Turbines During Large Disturbances. Energies 2018, 11, 480. [Google Scholar] [CrossRef]
- Resolucion No 60 del 2019: Modificaciones al Reglamento de Operación para permitir la conexión y operación de plantas solares fotovoltaicas y eólicas en el SIN. Comisión de Regulación de Energía y Gas CREG. 2019. Available online: http://apolo.creg.gov.co/Publicac.nsf/1c09d18d2d5ffb5b05256eee00709c02/ca640edbe4b7b5100525842d0053745d/$FILE/Creg060-2019.pdf (accessed on 27 December 2022).
- Technical Regulation 3.2.2 for PV Power Plants above 11 kW; Energinet: Fredericia, Denmark, 2016.
- The Grid Code; Electricity System Operator for Great Britain; National Grid ESO: Warwick, UK, 2020.
- Ge, J.; Shuai, Z.; Tu, C.; Luo, A.; Shen, Z.J. Flexible Control Strategy for Enhancing Power Injection Capability of Three-Phase Four-Wire Inverter During Asymmetrical Grid Faults. IEEE Trans. Power Electron. 2021, 36, 9592–9608. [Google Scholar] [CrossRef]
- Miret, J.; Garnica López, M.; Vicuña, L.; Camacho, A. PI-based controller for low-power distributed inverters to maximize reactive current injection while avoiding over voltage during voltage sags. IET Power Electron. 2018, 12, 83–91. [Google Scholar] [CrossRef]
- Shabestary, M.M.; Mohamed, Y.A.I. Advanced Voltage Support and Active Power Flow Control in Grid-Connected Converters Under Unbalanced Conditions. IEEE Trans. Power Electron. 2018, 33, 1855–1864. [Google Scholar] [CrossRef]
- Tafti, H.D.; Maswood, A.I.; Konstantinou, G.; Pou, J.; Townsend, C.D. Low-voltage ride-through capability of full-row connected cascaded H-bridge converters. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016; pp. 984–987. [Google Scholar]
- Afshari, E.; Moradi, G.R.; Yang, Y.; Farhangi, B.; Farhangi, S. A review on current reference calculation of three-phase grid-connected PV converters under grid faults. In Proceedings of the 2017 IEEE Power and Energy Conference at Illinois (PECI), Champaign, IL, USA, 23–24 February 2017; pp. 1–7. [Google Scholar]
- Xu, C.; Xuehua, W.; Xinbo, R.; Cheng, W.; Huanyu, W. A Low-Voltage Ride-Through Control Strategy for Two-Stage T-Type Three-Level Photovoltaic Inverters Limiting DC-Link Overvoltage and Grid-Side Overcurrent. In Proceedings of the 2018 20th European Conference on Power Electronics and Applications (EPE’18 ECCE Europe), Riga, Latvia, 17–21 September 2018; pp. P.1–P.10. [Google Scholar]
- Naresh, P.; Sravan Kumar, V.S. Analysis of Low Voltage Ride Through Techniques for Grid-Connected Photovoltaic Systems. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2020), Cochin, India, 2–4 January 2020; pp. 1–7. [Google Scholar]
- Mahela, O.P.; Shaik, A.G. Comprehensive overview of grid interfaced solar photovoltaic systems. Renew. Sustain. Energy Rev. 2017, 68, 316–332. [Google Scholar] [CrossRef]
- Solatialkaran, D.; Khajeh, K.G.; Zare, F. A Novel Filter Design Method for Grid-Tied Inverters. IEEE Trans. Power Electron. 2021, 36, 5473–5485. [Google Scholar] [CrossRef]
- Yagnik, U.P.; Solanki, M.D. Comparison of L, LC & LCL filter for grid connected converter. In Proceedings of the 2017 International Conference on Trends in Electronics and Informatics (ICEI), Tirunelveli, India, 11–12 May 2017; pp. 455–458. [Google Scholar]
- Mohammad Reza, M.M. Performance Comparison of Synchronous Reference Frame-Based PLLs Topologies Under Power Quality Disturbances. Iran. J. Sci. Technol. Trans. Electr. Eng. 2018, 43, 307–321. [Google Scholar]
- Pei, D.; Xia, Y. Robust Power System Frequency Estimation Based on a Sliding Window Approach Mathematical Problems in Engineering. Hindawi 2019, 2019, 1–98. [Google Scholar]
- Sun, M.; Sahinoglu, Z. Extended Kalman filter based grid synchronization in the presence of voltage unbalance for smart grid. In Proceedings of the ISGT 2011, Anaheim, CA, USA, 17–19 January 2011; pp. 1–4. [Google Scholar] [CrossRef]
- Milano, F. A Geometrical Interpretation of Frequency. IEEE Trans. Power Syst. 2022, 37, 816–819. [Google Scholar] [CrossRef]
- Pal, B.; Sahu, P.K.; Mohapatra, S. A review on feedback current control techniques of grid-connected PV inverter system with LCL filter. In Proceedings of the 2018 Technologies for Smart-City Energy Security and Power (ICSESP), Bhubaneswar, India, 28–30 March 2018; pp. 1–6. [Google Scholar]
- Guo, W.-Q.; Wu, W.-Y. Improved current regulation of three-phase grid-connected voltage-source inverters for distributed generation systems. IET Renew. Power Gener. 2010, 4, 101–115. [Google Scholar] [CrossRef]
- Akagi, H.; Watanabe, E.H.; Aredes, M. Instantaneous Power Theory and Applications to Power Conditioning; Wiley-IEEE Press: Piscataway, NJ, USA, 2017. [Google Scholar]
- ORourke, C.J.; Qasim, M.M.; Overlin, M.R.; Kirtley, J.L. A Geometric Interpretation of Reference Frames and Transformations: dq0, Clarke, and Park. IEEE Trans. Energy Convers. 2019, 34, 2070–2083. [Google Scholar] [CrossRef]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; Wiley-IEEE Press: Piscataway, NJ, USA, 2011. [Google Scholar]
- Meral, M.E.; Celik, D. Mitigation of DC-link voltage oscillations to reduce size of DC-side capacitor and improve lifetime of power converter. Electr. Power Syst. Res. 2021, 194, 107048. [Google Scholar] [CrossRef]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; John Wiley & Sons: Chichester, WS, UK, 2007; Chapter 10; pp. 237–287. [Google Scholar]
- Miret, J.; Castilla, M.; Camacho, A.; Vicuña, L.G.d.; Matas, J. Control Scheme for Photovoltaic Three-Phase Inverters to Minimize Peak Currents During Unbalanced Grid-Voltage Sags. IEEE Trans. Power Electron. 2012, 27, 4262–4271. [Google Scholar] [CrossRef]
- Miret, J.; Camacho, A.; Castilla, M.; de Vicuña, L.G.; Matas, J. Control Scheme With Voltage Support Capability for Distributed Generation Inverters Under Voltage Sags. IEEE Trans. Power Electron. 2013, 28, 5252–5262. [Google Scholar] [CrossRef]
- Castilla, M.; Miret, J.; Camacho, A.; Matas, J.; García de Vicuña, L. Voltage Support Control Strategies for Static Synchronous Compensators Under Unbalanced Voltage Sags. IEEE Trans. Power Electron. 2014, 61, 808–820. [Google Scholar] [CrossRef]
- Guo, X.; Zhang, X.; Wang, B.; Wu, W.; Guerrero, J.M. Asymmetrical Grid Fault Ride-Through Strategy of Three-Phase Grid-Connected Inverter Considering Network Impedance Impact in Low-Voltage Grid. IEEE Trans. Power Electron. 2014, 29, 1064–1068. [Google Scholar] [CrossRef]
- Camacho, A.; Castilla, M.; Miret, J.; Guzman, R.; Borrell, A. Reactive Power Control for Distributed Generation Power Plants to Comply With Voltage Limits During Grid Faults. IEEE Trans. Power Electron. 2014, 29, 6224–6234. [Google Scholar] [CrossRef]
- Mirhosseini, M.; Pou, J.; Agelidis, V.G. Individual Phase Current Control With the Capability to Avoid Overvoltage in Grid-Connected Photovoltaic Power Plants Under Unbalanced Voltage Sags. IEEE Trans. Power Electron. 2015, 30, 5346–5351. [Google Scholar] [CrossRef]
- Wang, Y.; Ping, Y.; Zhirong, X. Flexible Voltage Support Control with Imbalance Mitigation Capability for Inverter-Based Distributed Generation Power Plants under Grid Faults. J. Power Electron. 2016, 16, 1551–1564. [Google Scholar] [CrossRef]
- Jin, P.; Li, Y.; Li, G.; Chen, Z.; Zhai, X. Optimized hierarchical power oscillations control for distributed generation under unbalanced conditions. Appl. Energy 2017, 194, 343–352. [Google Scholar] [CrossRef]
- Huka, G.B.; Li, W.; Chao, P.; Peng, S. A comprehensive LVRT strategy of two-stage photovoltaic systems under balanced and unbalanced faults. Int. J. Electr. Power Energy Syst. 2018, 103, 288–301. [Google Scholar] [CrossRef]
- Celik, D.; Meral, M.E. A flexible control strategy with overcurrent limitation in distributed generation systems. Int. J. Electr. Power Energy Syst. 2019, 104, 456–471. [Google Scholar] [CrossRef]
- Shuvra, M.A.; Chowdhury, B. Distributed dynamic grid support using smart PV inverters during unbalanced grid faults. IET Renew. Power Gener. 2019, 13, 598–608. [Google Scholar] [CrossRef]
- Garnica, M.; de Vicuña, L.G.; Miret, J.; Castilla, M.; Guzmán, R. Optimal Voltage-Support Control for Distributed Generation Inverters in RL Grid-Faulty Networks. IEEE Trans. Power Electron. 2020, 67, 8405–8415. [Google Scholar] [CrossRef]
- Meral, M.E.; Çelik, D. Minimisation of power oscillations with a novel optimal control strategy for distributed generation inverter under grid faulty and harmonic networks. IET Renew. Power Gener. 2020, 14, 3010–3022. [Google Scholar] [CrossRef]
- Castilla, M.; Camacho, A.; Miret, J.; Guzmán, R.; de Vicuña, L.G. Avoiding overvoltage problems in three-phase distributed-generation systems during unbalanced voltage sags. IET Power Electron. 2020, 13, 1537–1545. [Google Scholar] [CrossRef]
- Ding, G.; Gao, F.; Tian, H.; Ma, C.; Chen, M.; He, G.; Liu, Y. Adaptive DC-Link Voltage Control of Two-Stage Photovoltaic Inverter During Low Voltage Ride-Through Operation. IEEE Trans. Power Electron. 2016, 31, 4182–4194. [Google Scholar] [CrossRef]
- Garnica, M. Control of Grid-Connected Three-Phase Three-Wire Voltage-Sourced Inverters under Voltage Disturbances. Ph.D. Thesis, Universitat Politécnica de Catalunya, Catalonia, Spain, 2018. [Google Scholar]
- IEEE Std 241-1990; IEEE Recommended Practice for Electric Power Systems in Commercial Buildings. IEEE: Piscataway, NJ, USA, 1991; pp. 1–768.
- Just, H.; Gentejohann, M.; Eggers, M.; Dieckerhoff, S. Analysis and Control of DC-link Oscillations of Voltage Source Inverters during Unbalanced Grid Faults. In Proceedings of the 2019 21st European Conference on Power Electronics and Applications (EPE ’19 ECCE Europe), Genova, Italy, 3–5 September 2019; pp. P.1–P.10. [Google Scholar]
- Sufyan, M.; Rahim, N.A.; Eid, B.; Raihan, S.R.S. A comprehensive review of reactive power control strategies for three phase grid connected photovoltaic systems with low voltage ride through capability. J. Renew. Sustain. Energy 2019, 11, 042701. [Google Scholar] [CrossRef]
- Mohammedsaeed, E.K.; Jia, K. Comparison of some low voltage ride-through strategies. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 152–157. [Google Scholar]
- Bak, Y.; Lee, J.S.; Lee, K.B. Low-Voltage Ride-Through Control Strategy for a Grid-Connected Energy Storage System. Appl. Sci. 2018, 8, 57. [Google Scholar] [CrossRef]
- Talha, M.; Raihan, S.; Rahim, N.A. PV inverter with decoupled active and reactive power control to mitigate grid faults. Renew. Energy 2020, 162, 877–892. [Google Scholar] [CrossRef]
- Talha, M.; Raihan, S.R.S.; Rahim, N.A.; Akhtar, M.N.; Butt, O.M.; Hussain, M.M. Multi-Functional PV Inverter With Low Voltage Ride-Through and Constant Power Output. IEEE Access 2022, 10, 29567–29588. [Google Scholar] [CrossRef]
- Yang, Y.; Enjeti, P.; Blaabjerg, F.; Wang, H. Wide-Scale Adoption of Photovoltaic Energy: Grid Code Modifications Are Explored in the Distribution Grid. IEEE Ind. Appl. Mag. 2015, 21, 21–31. [Google Scholar] [CrossRef]
- Rincon, D.J.; Mantilla, M.A.; Rey, J.M.; Garnica, M. DC Stage Modelling for LVRT Capability in Photovoltaic Systems. In Proceedings of the IECON 2021—47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021; pp. 1–7. [Google Scholar]
- Ezzat, M.; Benbouzid, M.; Muyeen, S.; Harnefors, L. Low-voltage ride-through techniques for DFIG-based wind turbines: State-of-the-art review and future trends. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 7681–7686. [Google Scholar] [CrossRef]
- Islam, H.; Mekhilef, S.; Shah, N.B.M.; Soon, T.K.; Seyedmahmousian, M.; Horan, B.; Stojcevski, A. Performance Evaluation of Maximum Power Point Tracking Approaches and Photovoltaic Systems. Energies 2018, 11, 365. [Google Scholar] [CrossRef]
- Mendes, V.F.; Matos, F.F.; Liu, S.Y.; Cupertino, A.F.; Pereira, H.A.; De Sousa, C.V. Low Voltage Ride-through Capability Solutions for Permanent Magnet Synchronous Wind Generators. Energies 2016, 9, 59. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Strategy | Year | Flexible | Restrictions | Secondary Objectives | Control Features | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Over Current Control | Over Voltage Control | Deals with Power Curtailment | Osc. Control | Osc. Control | Injection | Grid Impedance | RCI-GC | Complexity | ||||||
| P | Q | |||||||||||||
| [64] | * | × | ✓ | × | × | ✓ | ✓ | ✓ | ✓ | ✓ | × | × | × | Low |
| [67] | 2012 | ✓ | × | × | × | ✓ | × | ✓ | ✓ | × | × | ✓ | × | Low |
| [68] | 2013 | ✓ | ∘ | ✓ | × | × | × | × | × | ✓ | × | ✓ | × | Low |
| [23] | 2013 | ✓ | ✓ | × | × | ∘ | × | × | ✓ | ✓ | × | ✓ | × | Medium |
| [69] | 2014 | ✓ | ✓ | ✓ | × | × | × | × | × | ✓ | × | ✓ | ✓ | Medium |
| [70] | 2014 | ✓ | × | × | × | × | × | × | ✓ | × | ✓ | × | × | Low |
| [71] | 2014 | × | ✓ | ✓ | × | × | × | - | × | ✓ | × | ✓ | ✓ | Low |
| [21] | 2015 | ✓ | ✓ | × | ✓ | × | × | × | ✓ | ✓ | ✓ | ✓ | × | Low |
| [18] | 2015 | × | ✓ | ✓ | × | × | × | ✓ | × | ✓ | × | ✓ | × | Medium |
| [72] | 2015 | × | ✓ | ✓ | × | × | × | × | ✓ | ✓ | × | ✓ | × | Low |
| [73] | 2016 | × | ✓ | × | ✓ | ∘ | × | × | ✓ | ✓ | × | × | ✓ | Low |
| [74] | 2016 | × | × | × | × | ∘ | ∘ | ∘ | ✓ | ✓ | ✓ | ✓ | × | Low |
| [19] | 2016 | ✓ | ✓ | × | × | ✓ | × | ✓ | ✓ | ✓ | × | × | × | Low |
| [22] | 2017 | ✓ | ✓ | × | ✓ | ✓ | × | ✓ | ✓ | ✓ | × | × | × | Medium |
| [75] | 2018 | ✓ | ✓ | ✓ | × | × | × | × | × | ✓ | × | ✓ | × | Low |
| [34] | 2018 | ✓ | ✓ | × | × | ∘ | × | ∘ | ✓ | ✓ | × | × | ✓ | Medium |
| [48] | 2018 | × | ✓ | ✓ | ✓ | ∘ | × | ∘ | ✓ | ✓ | ✓ | ✓ | × | High |
| [41] | 2018 | × | ✓ | × | × | × | × | × | ✓ | ✓ | ✓ | ✓ | × | Low |
| [47] | 2018 | ✓ | ✓ | ✓ | × | × | × | - | ✓ | ✓ | × | ✓ | ✓ | Low |
| [76] | 2019 | ✓ | ✓ | × | × | ∘ | ∘ | ∘ | ✓ | ✓ | × | × | × | Medium |
| [77] | 2019 | × | ✓ | × | × | × | × | × | ✓ | ✓ | ✓ | ✓ | × | Low |
| [40] | 2020 | ✓ | ✓ | ✓ | × | ∘ | ∘ | ∘ | ✓ | ✓ | ✓ | ✓ | × | Medium |
| [78] | 2020 | ✓ | ✓ | × | × | ✓ | × | ✓ | ✓ | ✓ | ✓ | ✓ | × | Low |
| [79] | 2020 | ✓ | ✓ | × | × | ∘ | ∘ | ∘ | ✓ | ✓ | × | × | × | Medium |
| [80] | 2020 | ✓ | ✓ | ✓ | × | ∘ | ∘ | × | ✓ | ✓ | × | ✓ | ✓ | Medium |
| [65] | 2021 | ∘ | ✓ | × | × | ✓ | ∘ | ✓ | ✓ | ✓ | × | × | × | Low |
| Mode | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 1 | 1 | 1 | ✓ | 0 | 0 | ✓ | ||
| 2 | 1 | −1 | 1 | −1 | 0 | ✓ | ✓ | 0 | ||
| 3 | 1 | −1 | 1 | 1 | 0 | 0 | ✓ | ✓ | ||
| 4 | 1 | 1 | 1 | −1 | ✓ | ✓ | 0 | 0 | ||
| Mode | Voltage Support | ||||
|---|---|---|---|---|---|
| I | ↑ | 1 | 0 | 1 | 0 |
| II | ↓ | 0 | 1 | 0 | 1 |
| III | ↑ and ↓ | 1 | −1 | 1 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rincon, D.J.; Mantilla, M.A.; Rey, J.M.; Garnica, M.; Guilbert, D. An Overview of Flexible Current Control Strategies Applied to LVRT Capability for Grid-Connected Inverters. Energies 2023, 16, 1052. https://doi.org/10.3390/en16031052
Rincon DJ, Mantilla MA, Rey JM, Garnica M, Guilbert D. An Overview of Flexible Current Control Strategies Applied to LVRT Capability for Grid-Connected Inverters. Energies. 2023; 16(3):1052. https://doi.org/10.3390/en16031052
Chicago/Turabian StyleRincon, David J., Maria A. Mantilla, Juan M. Rey, Miguel Garnica, and Damien Guilbert. 2023. "An Overview of Flexible Current Control Strategies Applied to LVRT Capability for Grid-Connected Inverters" Energies 16, no. 3: 1052. https://doi.org/10.3390/en16031052
APA StyleRincon, D. J., Mantilla, M. A., Rey, J. M., Garnica, M., & Guilbert, D. (2023). An Overview of Flexible Current Control Strategies Applied to LVRT Capability for Grid-Connected Inverters. Energies, 16(3), 1052. https://doi.org/10.3390/en16031052