1. Introduction
Various approaches to space launching have experienced rapid development over the last few decades [
1,
2]. Nevertheless, traditional disposable chemical energy rockets are still commonly used in space launch missions. Thus, the development of energy-efficient space launch approaches remains a research hotspot in the field of aviation and aerospace. Currently, several disadvantages of traditional chemical energy rocket technology are yet to be overcome: (1) chemical energy rocket technology has approached its theoretical mass limit for launch missions, but several marginal effects can be improved [
3]; (2) air pollution is associated with the combustion process; (3) the ratio of the payload to the total take-off weight of a launch vehicle is very low in chemical energy rockets, i.e., a few percent for low earth orbit (LEO), and as low as one percent for geosynchronous orbit (GTO). This means that the launch cost is very expensive in regards to a conventional chemical energy launch mission. The unit kg payload delivery cost of Falcon 9 can be reduced from approximately 20000 USD to 800 USD through reusable design [
4]. (from USD 4000 to USD 20,000 per kilo) [
4].
Therefore, the energy-efficient launch approach has become a research hotspot, with the goal of improving energy efficiency and thus reducing the launch cost. Many advanced launch technologies have been researched [
5,
6,
7,
8,
9,
10,
11,
12,
13], such as the multidisciplinary design approach [
5], the use of a space elevator [
6], reusable launch vehicles [
7,
8], and an electromagnetic boost launch system [
9,
10,
11]. Using these technologies, reusable vehicles and electromagnetic boost launch system are proven to have high feasibility and efficiency.
Currently, the technology regarding a reusable launch consists of employing the aspirated two-stage to orbit (TSTO) approach, which uses oxygen in the atmosphere as the fuel in order to reduce the take-off weight and technical risks, as well as to ensure the ease of implementation, thus improving the launch economy and efficiency. As a durable reusable carrier, the space shuttle is partially re-used for the launch mission, i.e., the rocket-launched aircraft X-37B and the X43A powered by a scramjet engine. It is worth mentioning that the success of reusable launch technology from SpaceX indicates that reusable launch technology will continue to develop rapidly. Moreover, Russia, Europe, India, Japan, and China have paid increasing attention to the development of reusable launch technology, as can be seen in the Russian Clipper, the European Space Agency FLTP plan, the Britain Skylon, etc.
Different from the conventional mechanical or chemical launch mode, electromagnetic space launch systems (EMSLs) use electromagnetic propulsion to achieve acceleration at high- or ultra-high-speeds. They exhibit great advantages over chemical energy launched rockets, i.e., EMSLs can launch rockets with a larger useful load and a higher acceleration, reusability, energy conservation, efficiency, environmental protection, and safety. EMSLs have been developed with applications for various space launch modes from ground-based launches [
10], airborne launches [
11], the electromagnetic acceleration of superconductors [
12], and the augmentation of a permanent magnet linear synchronous motor [
13]. In 2018, McNab evaluated a two-stage-to-low-Earth-orbit projectile for space launches. The initial velocity is provided by EMSLs [
13]. An optimized design of an EM coil gun system is created for a GEO launch task, in which the energy costs of the electromagnetic launching system are minimized [
14]. Multi-pole field electromagnetic launching is a novel electromagnetic launching technology. It improves the performance of some techniques of traditional inductive electromagnetic emission technology. This type electromagnetic launching technology is suitable for high quality, large caliber projectiles with a high-speed launch potential [
15]. This advanced approach EMSLs can be considered as an inevitable method for future launch technology.
This paper proposes a novel three-level orbital launch approach based on a combination of a reusable two-level orbital launch method and an electromagnetic boost (EMB) system in which the reusable two-level orbital launch consists of a turbine-based combined cycle (TBCC) and a reusable rocket (RR). The proposed approach uses electromagnetic boosting to achieve a horizontal take-off–horizontal landing (HTHL) reusable launch.
Electromagnetic effects are impacted by many factors, such as magnet material, magnet shape, configuration, quantity, spacing, number of coils, coil size, length, etc. [
16]. Therefore, the electromagnetic effect is nonlinearly strong and multivariable. The optimization design for the electromagnetic effects is very complicated [
17]. When studying the energy harvester based on the electromagnetic effect, the literature [
18] develops an electromagnetic energy harvesting device based on a sprung eccentric rotor, and the optimization and characterized analysis of the electromagnetic system are presented. In Ref. [
19], an electromagnetic thermal-fluid kinetic model is proposed for microwave-assisted production, and the simulated model included the effects of electromagnetic propagation. From the previous electromagnetic energy applications, the electromagnetic energy can be reasonably considered as an inevitable method for future space launch technology due to its advantages including high acceleration, reusability, environmental protection, safety, energy savings, and efficiency.
The scheduled launch mission can be completed using less fuel through the use of electromagnetic acceleration. This paper establishes a mass estimation model for the proposed three-stage launch system. The model takes the parameters of the electromagnetic launch system as input, and the take-off weight of the reusable vehicle is considered as output. To minimize the take-off weight of a reusable vehicle, we use an optimization algorithm to optimize the design scheme of the proposed three-stage-to-orbit launch approach for the purpose of reducing the vehicle’s launch weight.
Over the last few years, a number of new swarm intelligence algorithms have been proposed. A very interesting new population-based swarm intelligence algorithm that simulates the movement of the glowworms in a swarm based on the distance between them and on a luminescent quantity called luciferin is called the glowworm swarm optimization(GSO) algorithm, presented by Krishnanand and Ghose [
20,
21].The algorithm shares a few features with some better known swarm intelligence-based optimization algorithms, such as colony optimization and particle swarm optimization, but with several significant differences. The performance of the GSO regarding various benchmark multimodal functions, which have multiple local optima, is analyzed, and the results prove that the GSO outperforms PSO [
22,
23].
Therefore, this paper firstly uses the standard GSO (SGSO) algorithm to optimize the electromagnetic boost portions of the three-stage-to-orbit system. But due to the inherent defects of the GSO algorithm, the optimization effect of the three-stage-to-orbit system is not satisfactory. Therefore, a novel adaptive quantum GSO (AQGSO) algorithm is designed by integrating quantum computing, genetic mutation, and sensitivity analysis. The superiority of the AQGSO algorithm is verified by comparison of the optimization results with those of the other two algorithms, and the optimal design scheme is obtained. This paper is organized as follows: the schematic of this paper is introduced in
Section 2. The overall concept of the proposed electromagnetic boost HTHL launch approach is presented in
Section 3.
Section 4 analyses the parameter sensitivity of the electromagnetic boost portion of the three-stage-to-orbit launch approach.
Section 5 presents the adaptive quantum GSO algorithm.
Section 6 carries out the launch system energy optimization using different optimization algorithms and analyzes the design results.
3. Modeling of the Proposed Three-Stage Orbital Launch System
3.1. Overall Launch Process
The proposed three-stage orbital launch system is made up of two major parts: (1) the electromagnetic boosting system (EMB), and (2) the reusable two-stage orbital launch system. At the first stage of the launch, the EMB system accelerates the space vehicle to a preset velocity. Once the acceleration process has been completed, the vehicle engine is ignited. After the vehicle reaches the separation flight node, the vehicle will be separated into two parts in the second stage of the launch—a turbine based combined cycle- (TBCC)based vehicle and a reusable rocket- (RR) based vehicle—and the TBCC vehicle will return to the ground for TBCC vehicle recovery. At the third stage, The RR vehicle will send the payload into the orbit, and then the RR vehicle will return to the ground for the RR vehicle recovery. The overall reusable launch process is shown in
Figure 2. The proposed EMB-TBCC-RR system is capable of reducing the cost of space transportation in two significant ways, i.e., the increased acceleration of the EMB and the reuse of the space vehicle.
3.2. TBCC-RR Two-Stage-to-Orbit System Take-Off Weight Estimation Model
The traditional space-to-ground rocket-based transport systems cannot be reused, and they must carry the oxidant with a low specific impulse. In addition, their total take-off weight is very large, and their hardware costs rise linearly with the number of launches. Thus, it is difficult to adapt to the increasing demand for round-trip transportation. The turbine-based combined air-breathing two-stage in-orbit reusable space-to-ground shuttle system can make full use of the oxygen, reducing its take-off mass. Its technical risk is lower, and the system is easier to implement. When the component completes its work, it will be separated from the system at the appropriate moment and returned to the ground. Therefore, it can significantly reduce the consumption of propellant, reducing costs.
The air-breathing engine of the TBCC-RR has a small thrust-to-weight ratio and is not suitable for climbing. Therefore, the air-breathing mode track in the mission profile is flat, and acceleration is the main task. The work of increasing the altitude and finally ascending to orbit is mainly performed by a rocket-powered two-stage aircraft.
The TBCC-RR earth to orbit mission profile can generally be divided into several nodes, based on the series and modalities of the engine, denoted as a series of flight nodes
[
34], where
represent initial take-off velocity and altitude. Usually,
.
represent the required orbital speed and altitude for the orbital mission, as shown in
Figure 3.
and represent the required speed and altitude at the i-th design flight node during flight along the mission profile.
Define the flight mode means vehicle flight from the node to node, the weight of the node spacecraft is , the weight ratio of the mode is .
The TBCC-RR Two Stage to orbit mass estimation model was built in [
34]. The total weight ratio of the first stage
and the second stage
can be written as Equation (1) and Equation (2), respectively.
with
where
and
are, respectively, the propellant weight and the structural weight in the first stage, and
and
are, respectively, the propellant weight and the structural weight in the second stage. For a given payload weight
, the total take-off weight
of the spacecraft can be calculated by Equation (3):
where
,
.
From the previous Equations (1)–(3), the total take-off weight of the spacecraft is determined by its payload weight and the mission profile nodes . For the initial launch state , the accelerometer is used to increase the initial speed , and thus, the total taking-off weight can be reduced.
In this paper, the space mission with a payload of 8 tons and a height of 200 km is presented as follows:
- (1)
represent the initial take-off velocity and altitude. Usually, . represent the required orbital speed and altitude for the orbital mission;
- (2)
At the mission profile point , the primary engine is switched from turbojet mode to sub ramjet mode at an altitude of 15 km and a Ma of around 2.5;
- (3)
At the mission profile point
, the transition is switched from sub combustion ramjet mode to super combustion ramjet mode, at an altitude of 22.5 km and around 6 Ma, the aircraft switches to scramjet mode and then flies along the 95.8 kPa is kinetic pressure line [
35];
- (4)
The first and second stage separation points are set on the isokinetic pressure line as . The first stage aircraft glides and lands after separation;
- (5)
The second stage aircraft is propelled into orbit by liquid hydrogen/liquid oxygen rockets: .
Based on the two-stage to orbit (TSTO) mass estimation model, the basic parameters of the TBCC-RR two-stage orbiting system are selected [
34], as shown in
Table 1. For the take-off weight and the weight of each stage of the system scheme shown in
Figure 3, the estimated results are shown in
Table 2. Since the initial state speed is 0, it can be seen from the estimation formula that if the initial speed can be increased, it will help reduce the take-off weight of the system.
3.3. EMB System Modeling
In regards to the EMB system, as a typical electromagnetic boost system, the coil-type electromagnetic boost system is particularly suitable for obtaining high quality, and thus, is applicable to the spacecraft propulsion task due to its advantages of a simple structure and high energy utilization.
The proposed electromagnetic boost (EMB) system is a multi-level boost system; it is mainly composed of a pulse power supply (capacitor bank), a switch, a drive coil, a transmission component (armature and load), and a synchronous trigger control circuit, as shown in
Figure 4.
As shown in
Figure 1 above, when the armature is in the optimal triggering position of the first stage drive coil, the synchronous triggering circuit and switch controlled capacitor bank feed the first stage drive coil. The pulse current passes through the drive coil to generate a strong magnetic field, which induces eddy currents within the armature. For the convenience of analysis, the current loops in the drive coil and armature are simplified as the current loops
and
, as shown in
Figure 4, respectively.
is the pulse current in
, and
is the induced eddy current in
. The
and
are reversed to generate repulsion. Although the drive coil is subjected to a downward repulsive force, it remains stationary due to fixation, and the armature is accelerated by an upward repulsive force. When the armature moves to the appropriate position for the discharge of the second stage drive coil, the second stage circuit feed control switch is closed, and the armature is then accelerated again. Thus, the armature is continuously accelerated by the n-stage drive coil.
The schematic diagram of the equivalent circuit model for coil-type EMB system is shown in
Figure 5, assuming that the proposed EMB is sequentially triggered by n-level drive coils.
As shown in
Figure 5,
,
,
, and
are the capacitance, capacitor charging voltage, inductance, and resistance of the m-level drive coil for each stage
, respectively.
is the self-inductance,
is the resistance of the armature, and
is the mutual inductance between the armature and drive coil. K is the switch. From
Figure 5, it can be seen that the following equations can be obtained, based on the Kirchhoff’s law:
It is assumed that when the armature moves to the trigger point of the stage
drive coil at time
, i.e., the coil of stage
discharges at time
, the trigger switches of stage
are in the off state. Thus, the current in these drive coils is zero, and the voltage across the capacitor maintains the initial voltage:
Based on Equations (8) and (9), Equations (4)–(7) can be rewritten as:
Thus, the dynamic behaviors of mutual inductance can be obtained as follows:
Equations (10)–(14) can be re-arranged in a matrix form:
where
The constant transformation of Equation (15) is
For the initial state, the velocity and current are zero; thus, the derivative of the current can be expressed as Equation (17) at time
:
The derivative of current at time
:
where the component of
is
; thus, the current
at time
has the following expression:
The axial electromagnetic force on the armature at time
can be expressed as:
where
is the stage
interaction gradient between the drive coil and armature at time
,
is the drive coil current of stage
, and
is the armature momentary current of stage
. Thus, the armature motion can be expressed as:
where
is the armature acceleration,
is the armature speed, and
is the armature displacement.
From the structure in
Figure 4, it can be noted that when the axial midpoint of the first stage drive coil is used as a reference point, the mutual inductance between the armature and the drive coil
can be considered as a function of the reference point translation. Thus, the mutual inductance function is defined as:
where
is the position of the
drive coil.
3.4. Take-Off Weight Estimation Model of a Reusable Vehicle Based on EMB-TBCC-RR
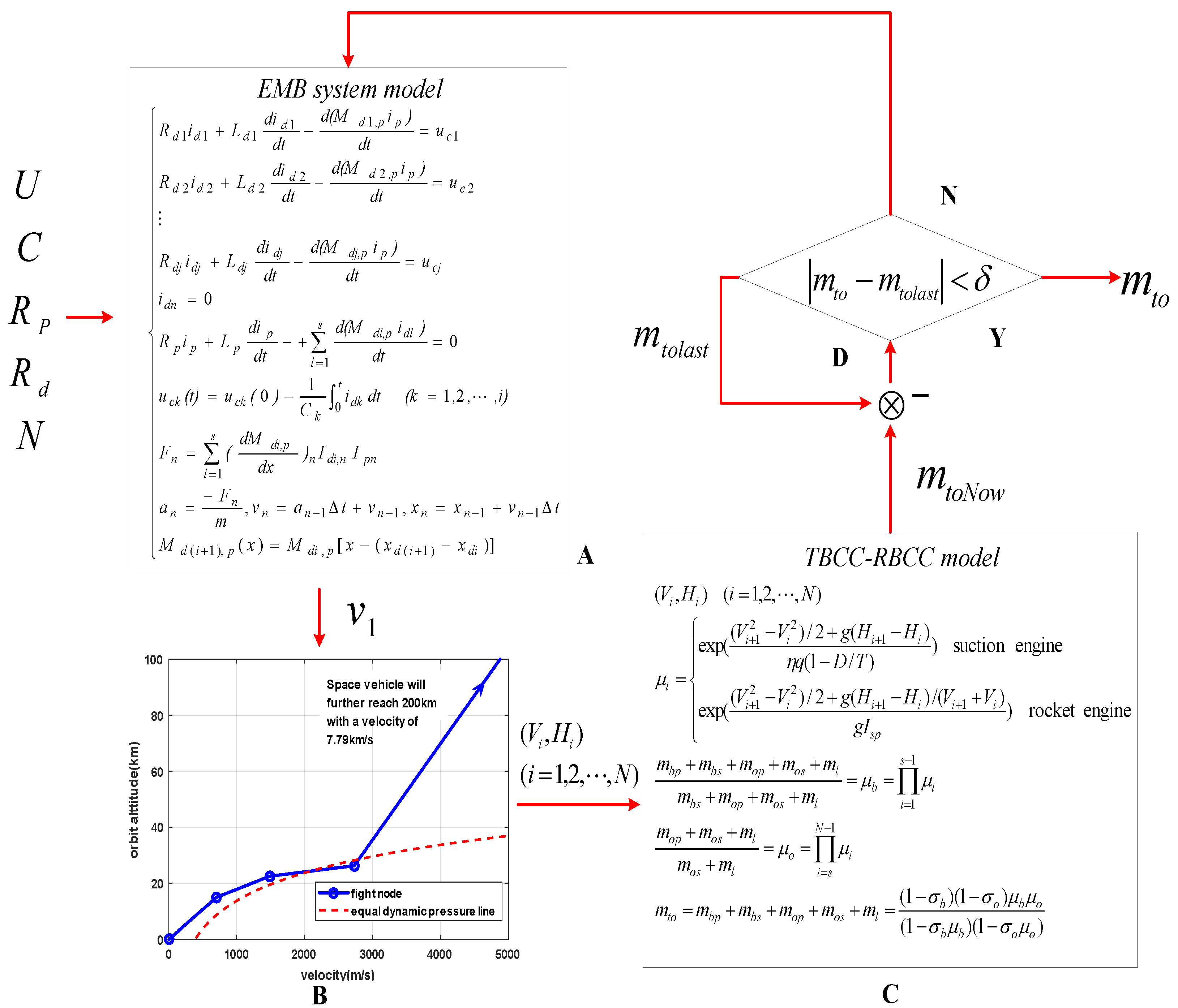
The take-off weight estimation model of a reusable vehicle based using EMB-TBCC-RR is shown in
Figure 6. Based on the above partial models, the take-off weight estimation model of the reusable space vehicle is composed of four parts. Firstly, the electromagnetic boost system parameters
and initial take-off weight of reusable vehicle
are used as the input to calculate the accelerated spacecraft take-off velocity
, as shown in part A of
Figure 6.
Part B of
Figure 6 shows the second part, the launch mission profile design, including spacecraft state
and
(forming the initial point) and the other flight nodes. Then, part C of
Figure 6 shows the third part, the TBCC-RR calculation model, which is used to obtaina new spacecraft take-off weight
, based on the designed mission profile. In part D, the last part of the model, the calculated take-off weight
is compared with the take-off weight
(used in the calculation of the first part A of the EMB system). If certain threshold
is satisfied, the calculation is completed, and the output is
. Otherwise, set
, and iterative calculations should be continued until the threshold condition is satisfied.
3.5. Model Implementation
In order to provide a clear model implementation, an example of a launch task is presented in which an 8 t load is sent into a 200 km orbit. The corresponding parameters of the proposed EMB-TBCC-RR system are listed in
Table 3.
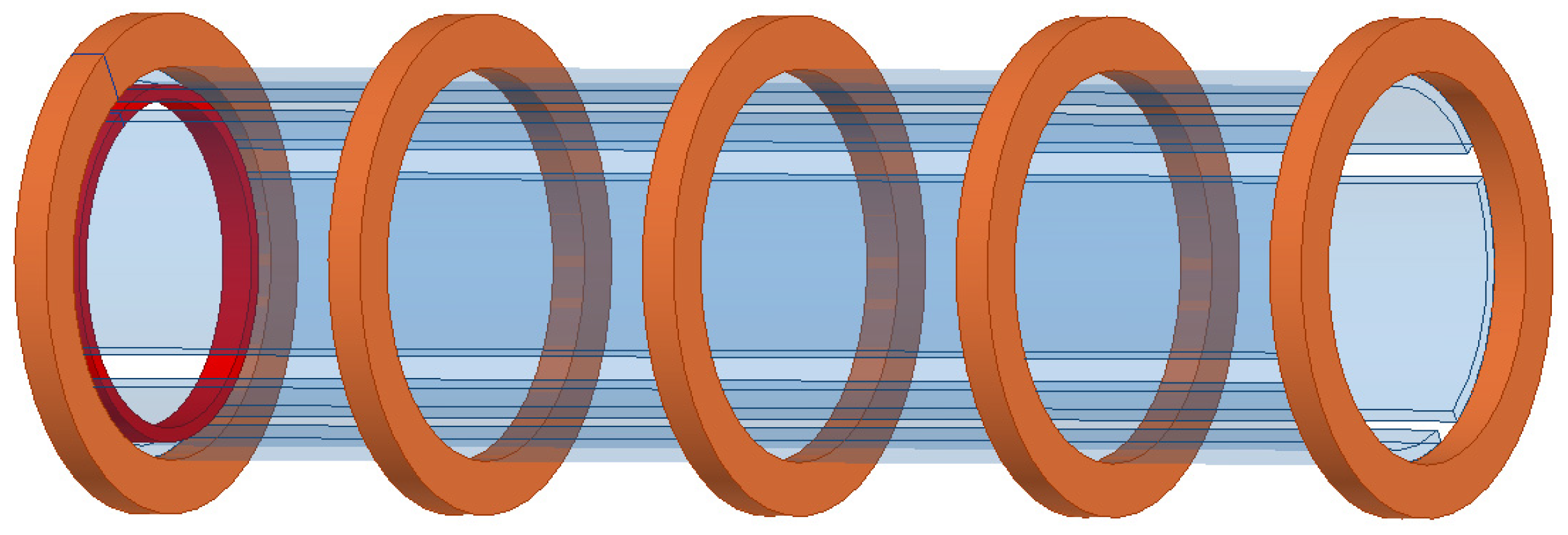
Based on the parameters in
Table 1, the Maxwell finite element method is performed.
Figure 7 shows the Maxwell model structure.
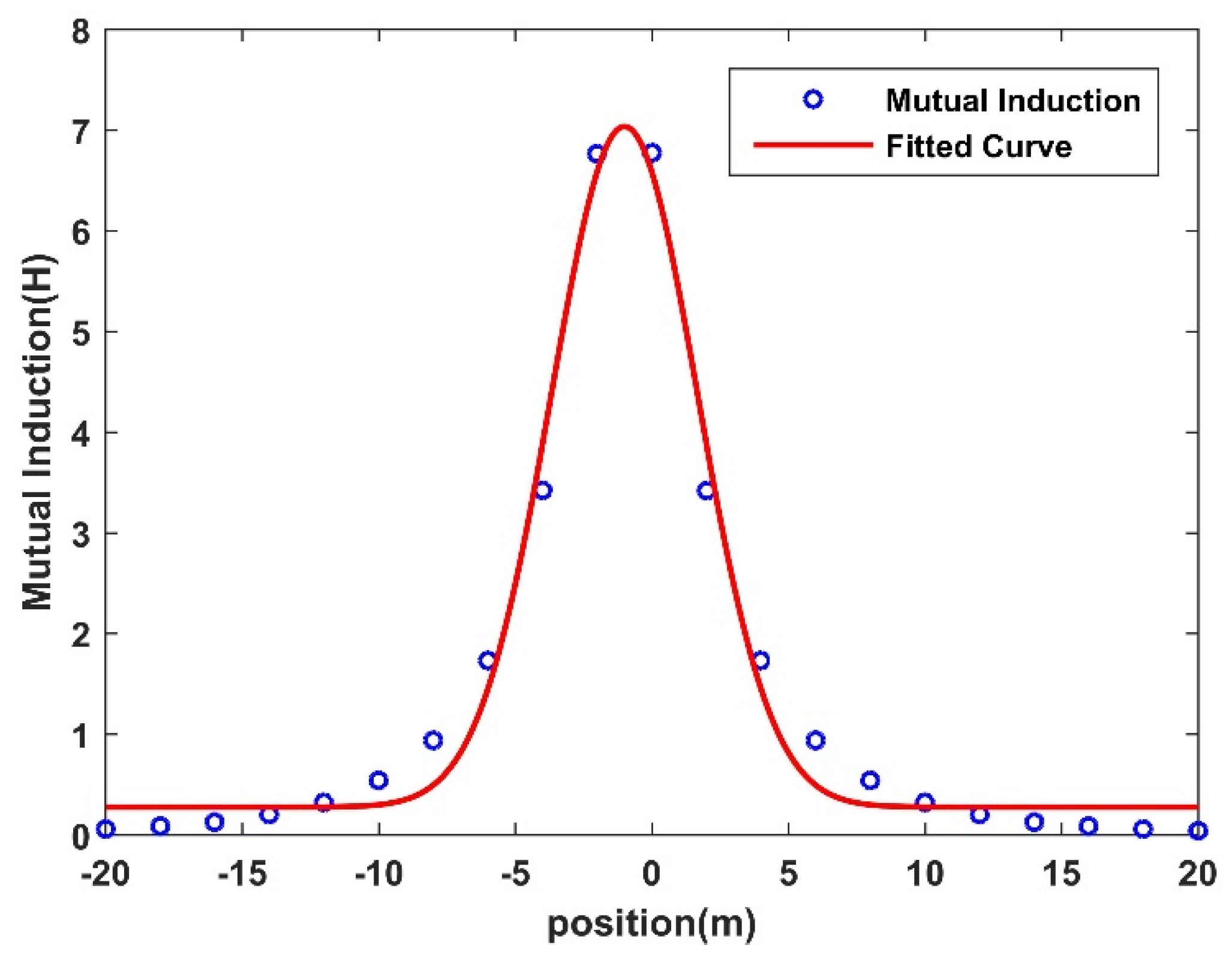
By using the Maxwell finite element method, the mutual inductance between two coils can be further obtained for the armature in different positions, as shown in
Figure 8.
It can be seen from
Figure 8 that the simulated mutual inductance values are discrete. In order to obtain continuous mutual inductance values and further fully analyze the mutual inductance, the least square fitting method is used to fit the discrete points. The fitting function result is also shown in
Figure 8, and it can be seen that the maximum value of mutual inductance is observed at distance position 0.
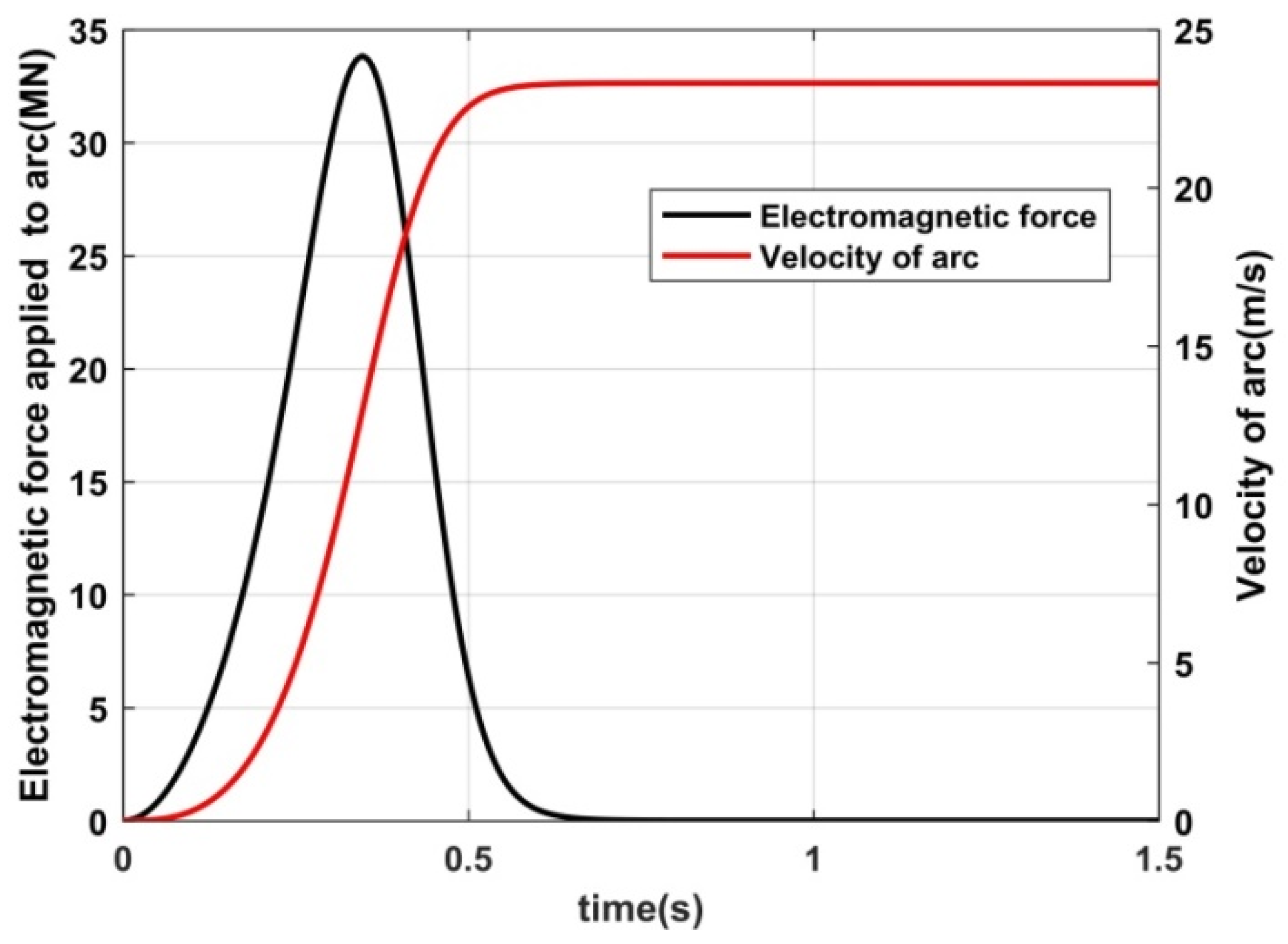
Based on the electromagnetic boost model presented in
Section 3.3, using the identified mutual inductance in Equation (22), the simulation results of the electromagnetic boost system are shown in
Figure 9 and
Figure 10, where
Figure 9 is related to the single stage EMB system, and
Figure 10 shows the multi-stage case. In
Figure 9, the maximum thrust of the single stage 34,489 kN is observed at 0.3 s.
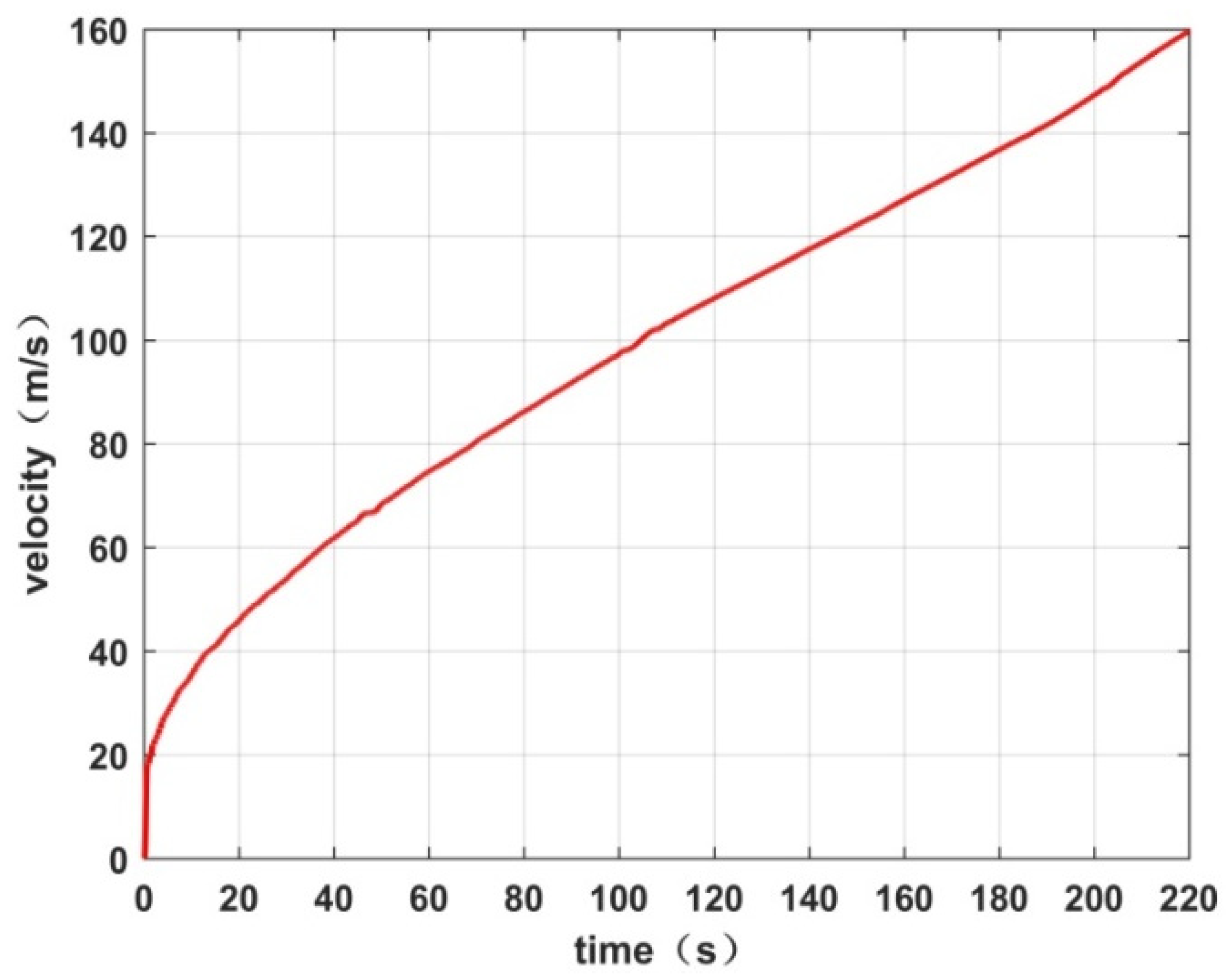
Figure 10 shows the simulated acceleration of a multi-stage electromagnetic launch, in which the vehicle can be accelerated to a speed of 160 m/s. During the acceleration phase, the acceleration rate shows a gradual decrease, since the acceleration time of each stage is reduced with the increasing vehicle speed. The electromagnetic boost system parameters are shown in
Table 4.
By using the proposed iterative calculation process (
Figure 6), the take-off weight of the reusable two-level TBCC-RR and the proposed three-level EMB-TBCC-RR can be obtained, respectively. The calculation results are shown in
Table 5.
From
Table 5, it can be observed that the mass reduction is mainly reflected in the fuel and structural mass of the first stage engine. After using electromagnetic boosting, the overall mass reduction is 1.92 t, where mass reduction of the first-class engine is 1.73 t (90% of the overall effect).
8. Conclusions
In this paper, an original parameters sensitivity-based adaptive quantum-inspired-glowworm swarm optimization (AQGSO) algorithm is developed to optimize the electromagnetic boosting system design in order to significantly improve the performance of the HTHL reusable launch vehicle. The main novel contribution of this paper can be summarized as follows:
A novel three-stage orbital launch approach is proposed based on a combination of a traditional two-stage orbital launch method and an electromagnetic boost (EMB) system in which the traditional two-stage orbital launch consists of a turbine-based combined cycle (TBCC) and a reusable rocket (RR). The EMB system can significantly improve the energy efficiency and reusability of the proposed TBCC-RR system. This novel three-stage orbital launch approach is original in this paper, since a full mathematical model of EMB-TBCC-RR has been established;
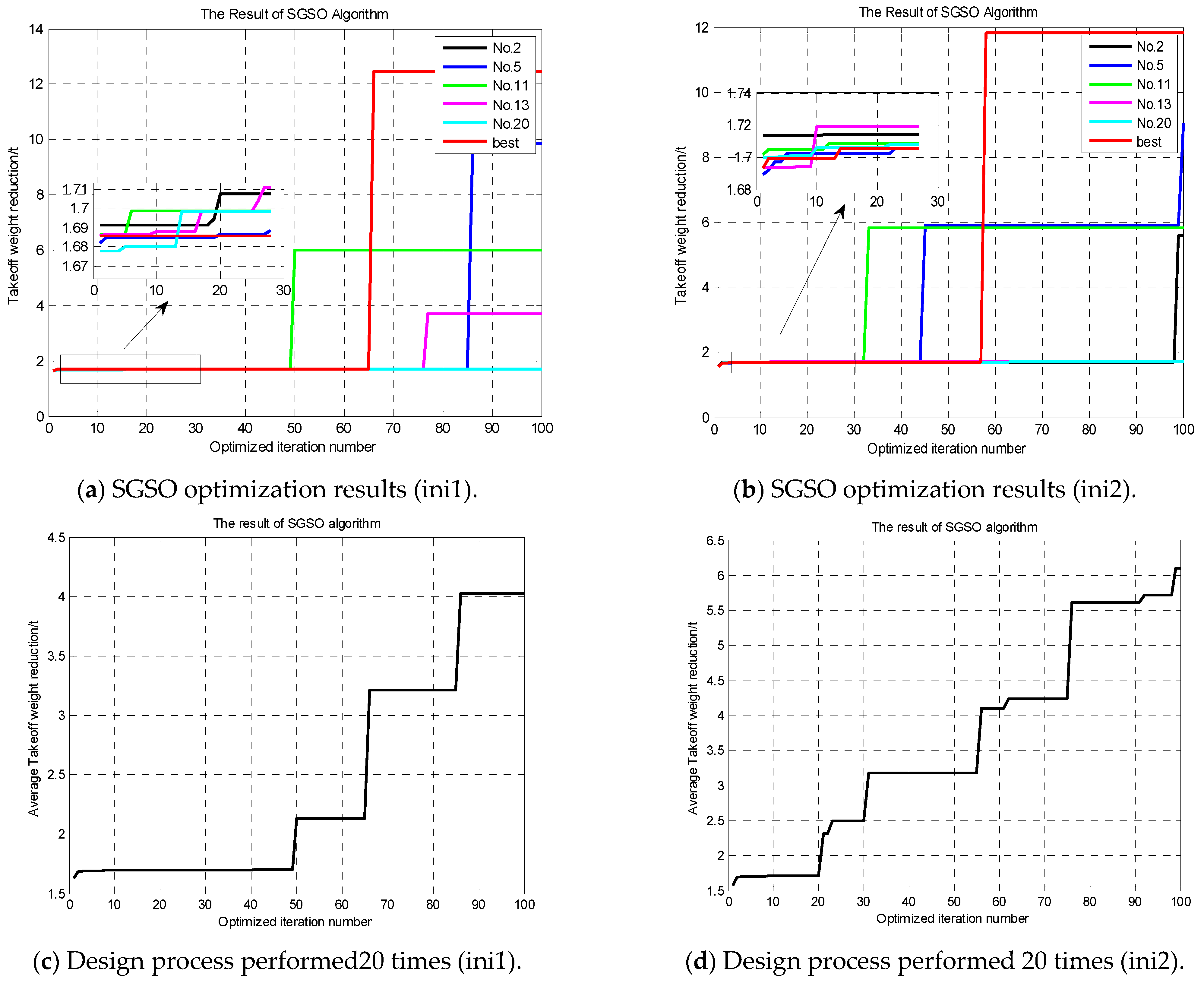
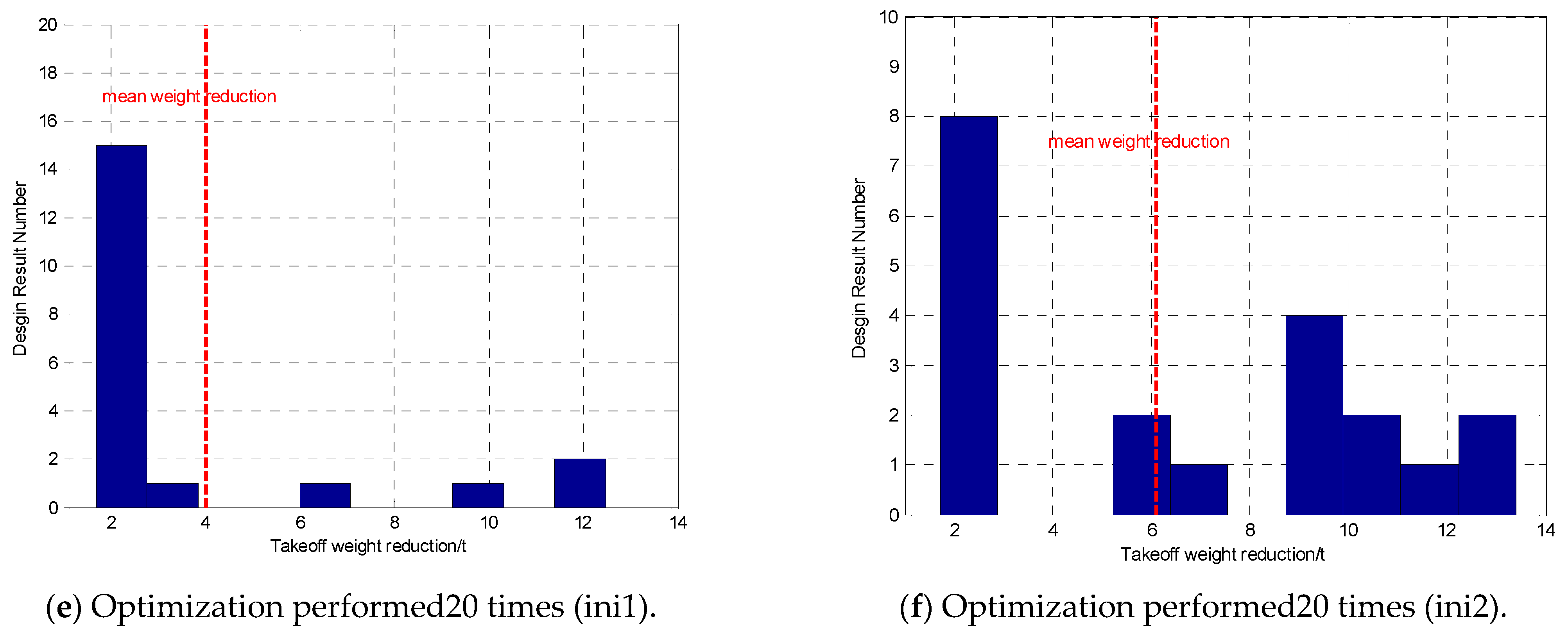
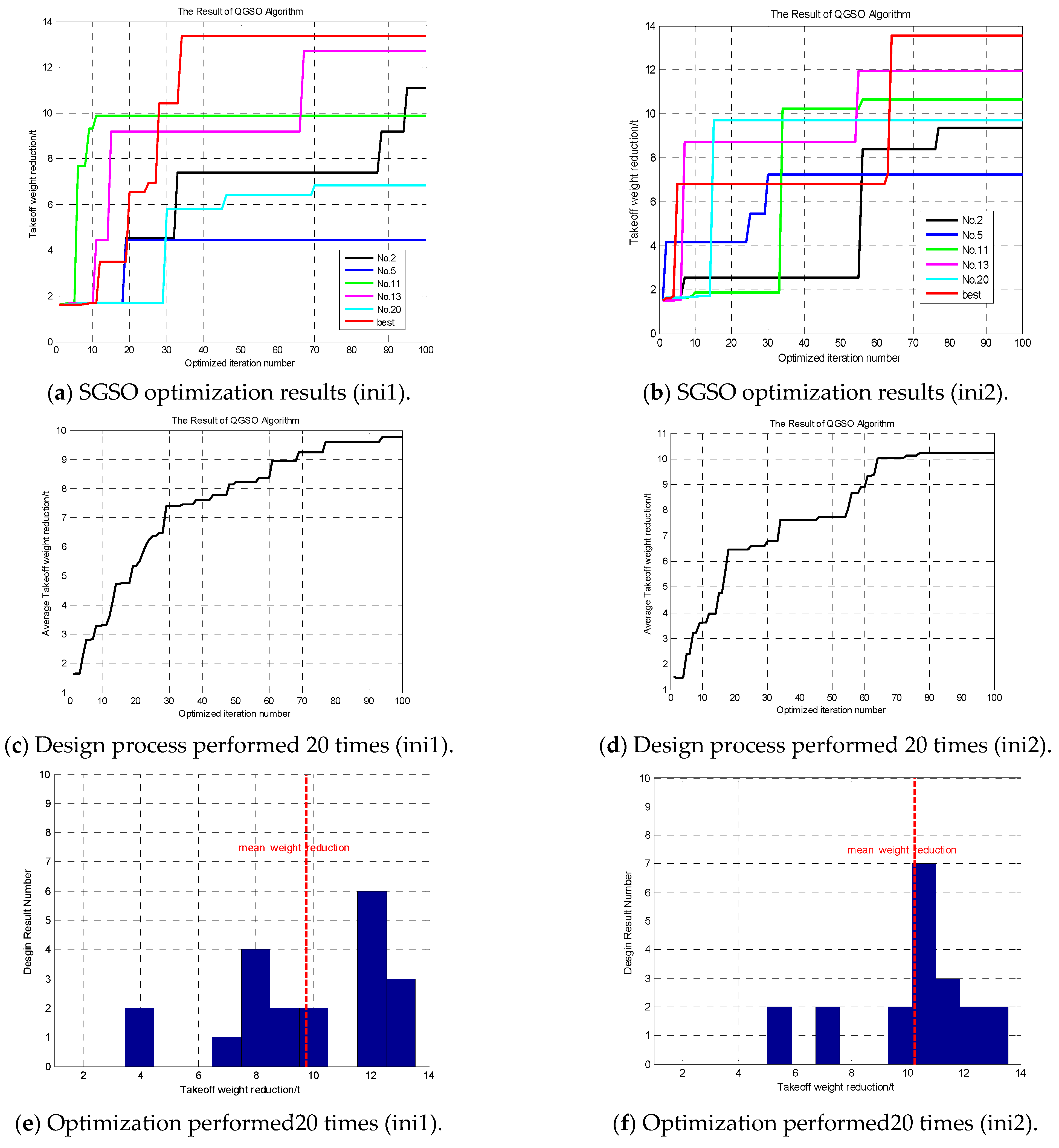
A SGSO optimization method is used to optimize the proposed three-stage launch approach. In order to enhance the spatial coverage efficiency of the individual glowworm population, a quantum coding is applied into the SGSO algorithm to achieve glowworm encoding and parallel computing. This QGSO algorithm yields a better convergence speed and improved global exploration ability;
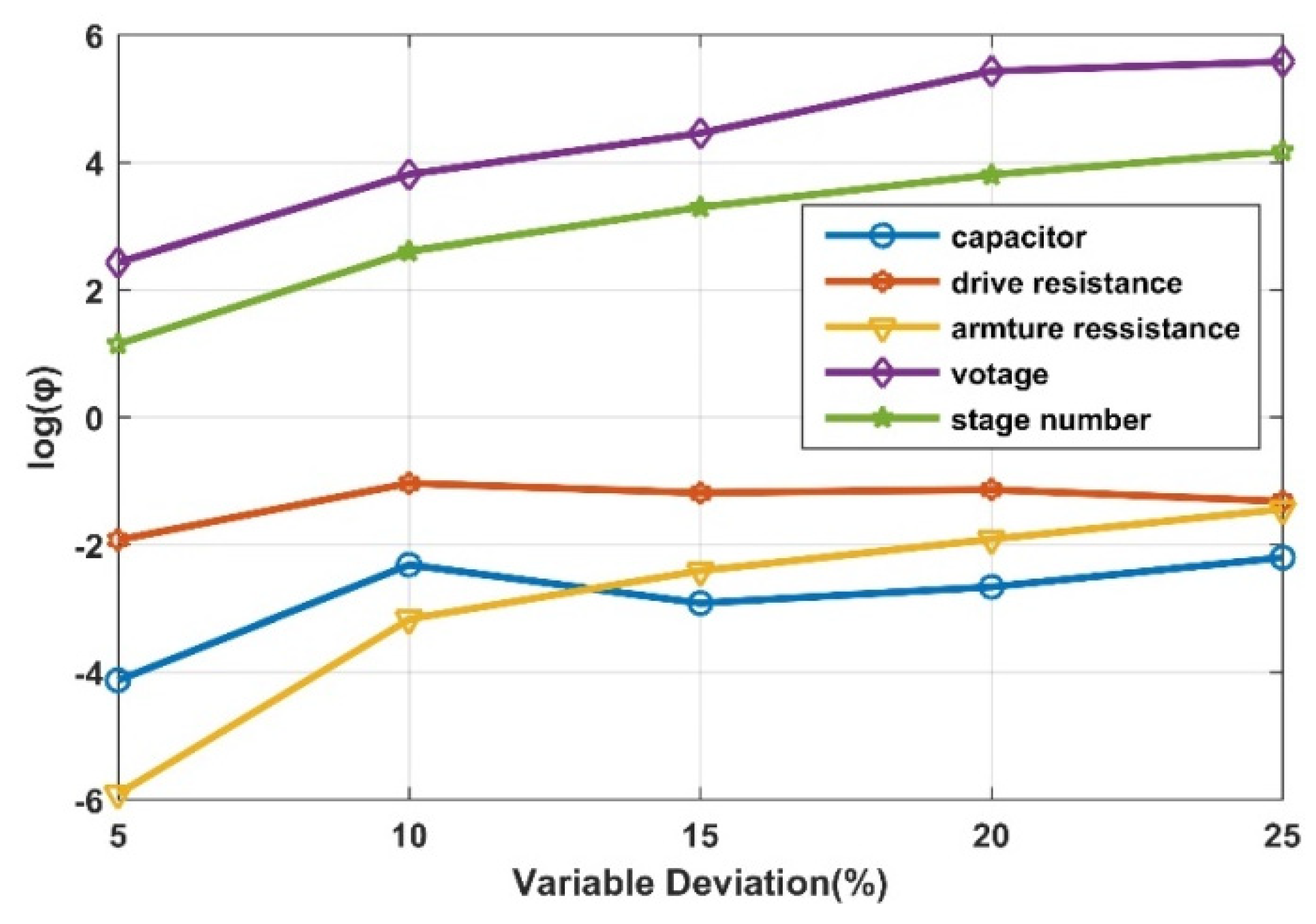
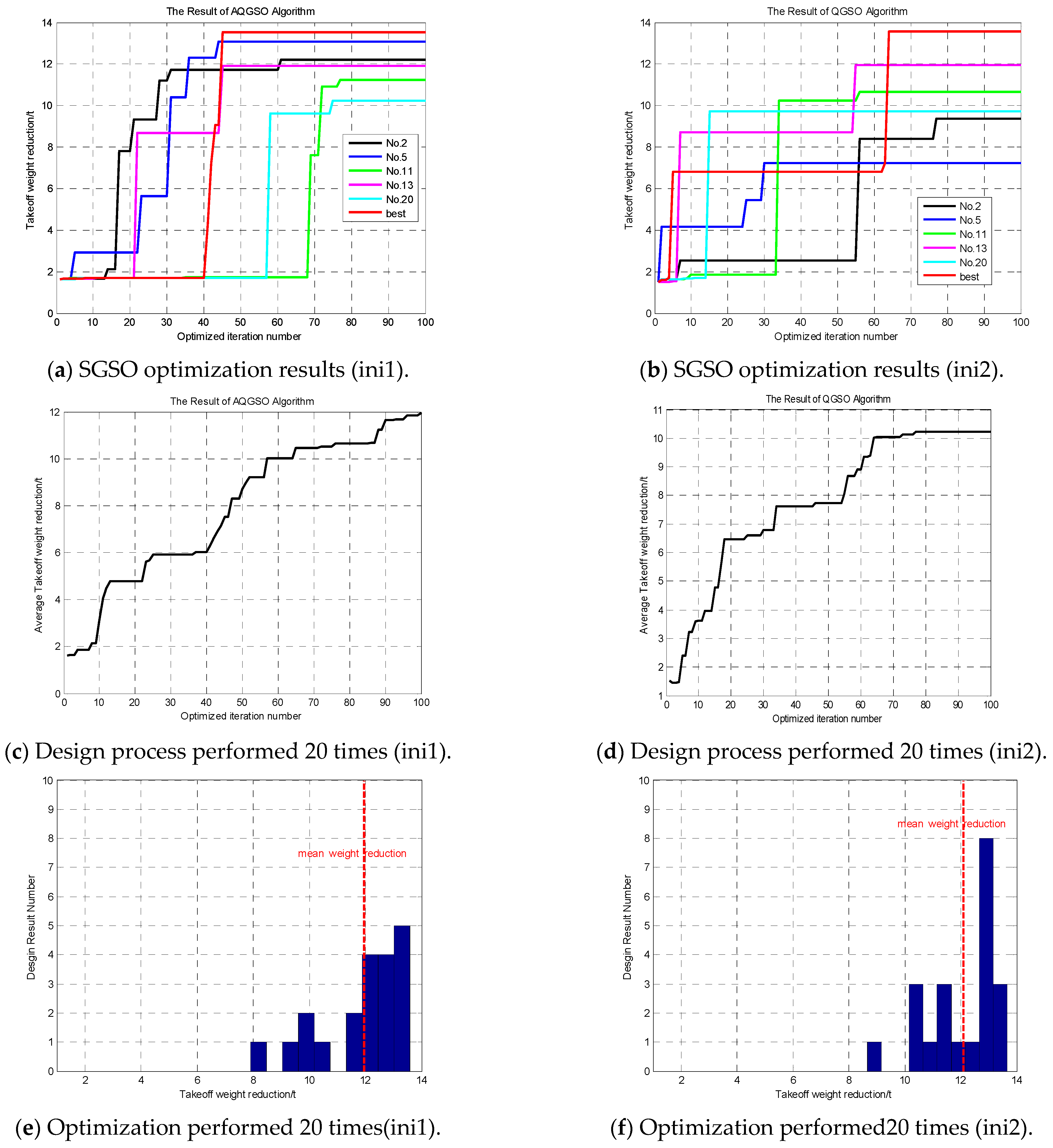
For the nonlinearity and complexity of the proposed EMB system, a parameters sensitivity analysis is performed. This sensitivity analysis provides insights into the influence of different parameters on EMB performance. In addition, based on these quantitative analysis results, a gradient-based adaptive step size adjustment strategy is developed. The robustness performance can be further improved using this AQGSO; the standard deviation is 41.86% lower than that of QGSO and 67.7% lower than that of SGSO.
By using the proposed orbital launch system and the optimization approach, a spacecraft with more space and capacity can be launched. The proposed novel three-level orbital launch approach provides fast deployment and effective implementation for the EMB system, which can help engineers to design and optimize the orbital launch system in the field of energy management and efficiency.
In future work, multi-level orbital systems will be further studied by combining other electromagnetic boosting forms, such as multi-pole electromagnetic boosting technology as a new type of electromagnetic launching technology. Compared with traditional inductive electromagnetic launching technology, this new method offers a large thrust, stable suspension, and a controllable torsional magnetic field, as well as good space application potential for large mass, large diameter projectiles and high-speed launching.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}