2.1. Downtime Case Analysis of Wind Turbines Installed in Poland
To confirm the significance of the wind turbine blade damage problem, the authors have analysed 38 wind turbines installed in Poland. The examined turbines were of the same type, made by the same manufacturer, and in their 3rd and 4th year of operation. Downtime periods and associated causes were analysed (
Table 2). In addition to turbine outages related to damage, those caused by, for example, scheduled periodic maintenance and warranty repairs, but also indirect external factors influencing the outage of the turbine, such as the electricity consumption network, were also included. It is shown here that, despite the relatively short service life of the turbines, blades are still a significant and important component associated with turbine damage.
Notably, the largest number of downtime hours was due to repairs and warranty inspections, as well as periodic inspections required by Polish law (mainly equipment under the supervision of the Office of Technical Inspection) and power grid failures. These factors account for as much as 45% of downtime in the operation of the wind farm under study. From the point of view of the wind farm/plant owner, grid failures are the most problematic, as they shut down the entire wind park. Elimination of such failures is beyond control of the maintenance team. From the point of view of the wind turbine operator, these are failures/shutdowns that are not even remotely predictable. Other troublesome units are the nacelle yaw system and turbine blades.
The top six failures ranking in
Table 2, account for 53% of wind turbine downtime. Therefore, the authors proposed an analysis of one of the most important components in terms of service-cost intensity, i.e., turbine blades.
Despite the installation of a lightning protection system in newer wind power plants, lightning-related phenomena cannot be ruled out. When lightning hits an unprotected blade which does not contain any metallic, conducting parts, it can discharge in one of three locations. Energy dissipation can occur on the outside blade surface or in the inner structure of the blade laminations. Lightning hitting the windmill blade usually creates a type of damage that can be described as stitching. This phenomenon is well known and some visual inspection can identify the problem, but there is no chance to help such a situation without a proper protective system. This can cause damage to turbine blades (blade tips are particularly vulnerable here).
An additional blade-related problem is servicing measurements related to the “quality” of the lightning protection system. Service technicians face the practical difficulty of assessing the lightning protection system or fully identifying the technical condition of the lightning protection system. There are no unambiguous and simple methods by which a service technician carrying out a periodic inspection can assess the condition of lightning conductors. In addition, the authors stated in a previous publication [
11] that lightning can be one of the causes of stray currents, which in turn can be a major cause of damage to one of the most expensive components in terms of replacement costs, namely turbine gearboxes. As indicated before, lightning might be a cause of significant damage to rotor blades, despite appropriate safeguards.
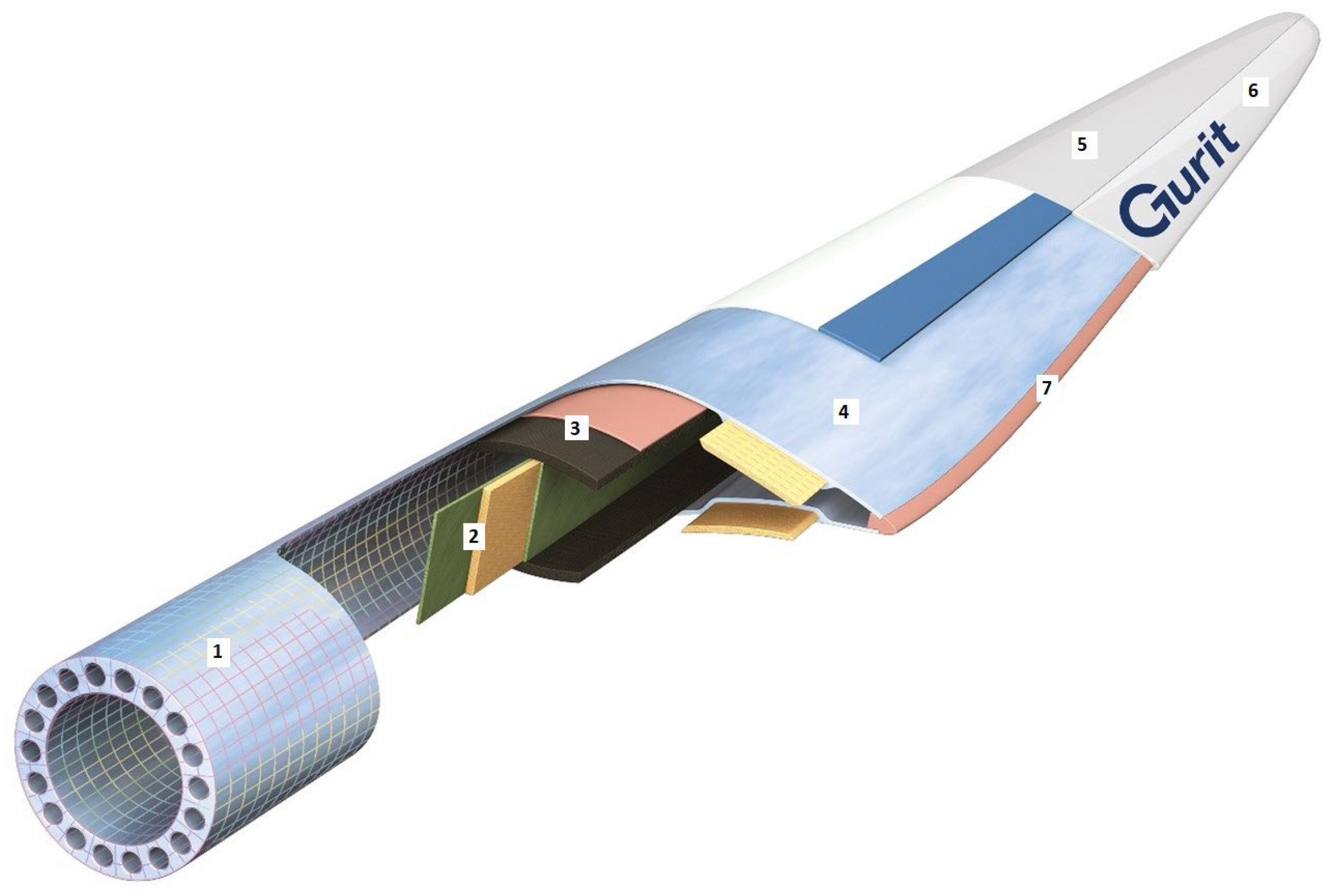
The construction of a classic wind turbine blade is shown in
Figure 1.
Figure 1.
Structure of a wind turbine blade (with permission from [
12]): 1—root, 2—shear web, 3—spar cap, 4—shell, 5—blade coating, 6—over-lamination, 7—bonding.
Figure 1.
Structure of a wind turbine blade (with permission from [
12]): 1—root, 2—shear web, 3—spar cap, 4—shell, 5—blade coating, 6—over-lamination, 7—bonding.
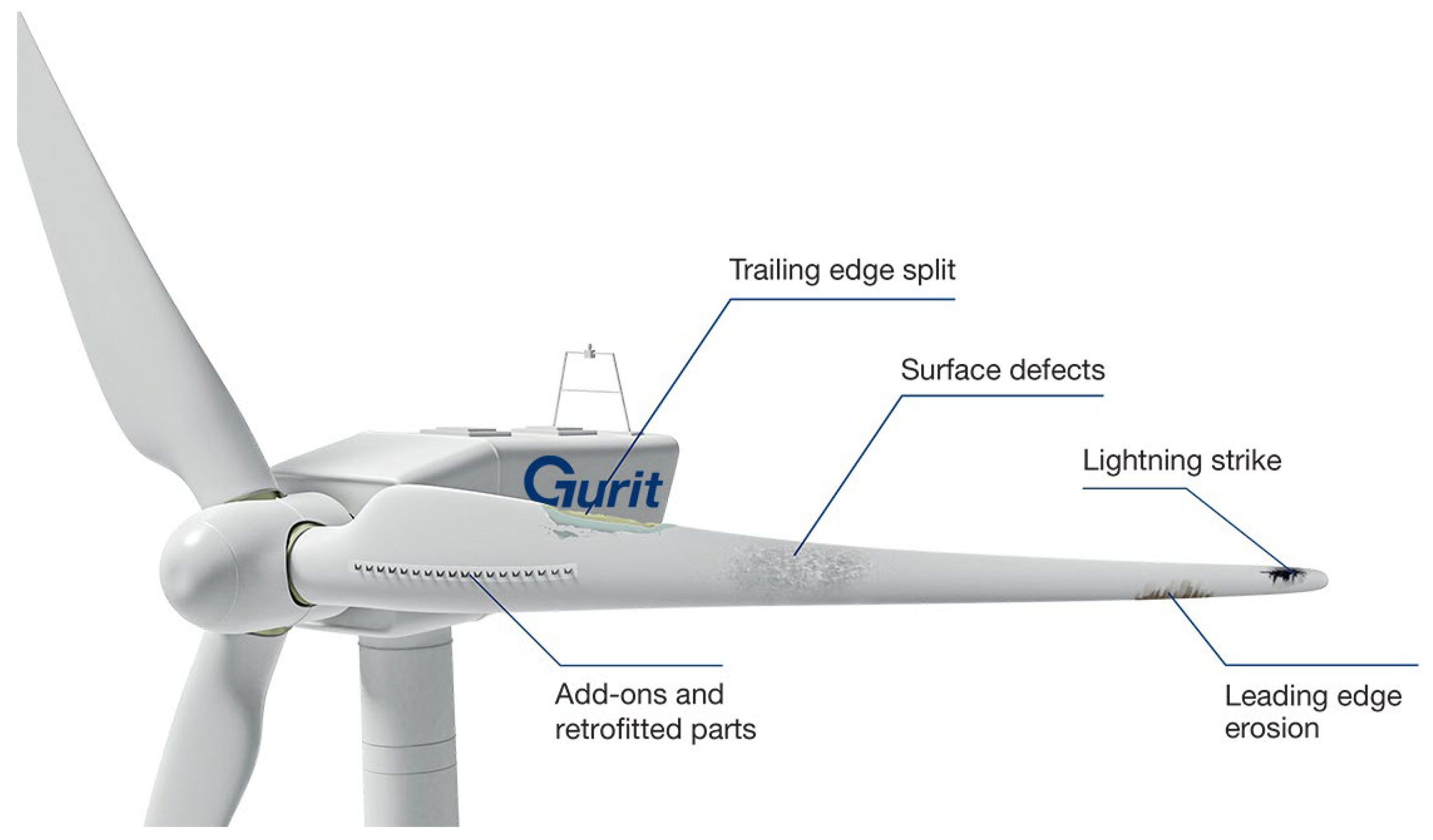
An analysis of the literature [
4,
6] confirms that the typical yet most common of turbine blades presented in
Figure 2 are caused by:
- −
Lightning strike;
- −
Erosion of the trailing edge (in most cases) [
13,
14];
- −
Damage caused by microcracks and fatigue [
13,
14];
- −
Icing (particularly significant in certain areas of turbine installation).
Individual damage failures are often dependent on each other. For instance, damage caused by microcracks can occur due to icing of the turbine blade. The splitting action of ice particles, in fact, causes delamination and subsequent cracking of the surface layer. In reference [
15], an algorithm for diagnosing wind turbine blade icing using hybrid features and the Stacked-XGBoost algorithm was proposed.
When considering the use of vibration signals in the diagnosis of important components of a wind turbine, it is necessary to take into account the vibrations generated by the blade bearings (also called angular contact/ pitch bearings), which are responsible for rotating the blade at the desired angles in order to optimize electricity production. The method called empirical wavelet thresholding, used to extract weak signals of failure occurrence, is described in [
16].
Figure 2.
Typical wind turbine blade damage (upon permission) [
12].
Figure 2.
Typical wind turbine blade damage (upon permission) [
12].
During operation on land, and especially offshore in a marine environment, localized structures may appear in the tower column and blades. If the boundary values are exceeded, the component may be damaged. The varying wind and wave impacts are a major cause of failures. These, in turn, significantly affect the safety of operation and operating costs associated with the elimination of damage. The authors of [
17] also indicate an inverse relationship. They show that turbine blade damage significantly affects the generated vibration diagnostic signals received in the tower.
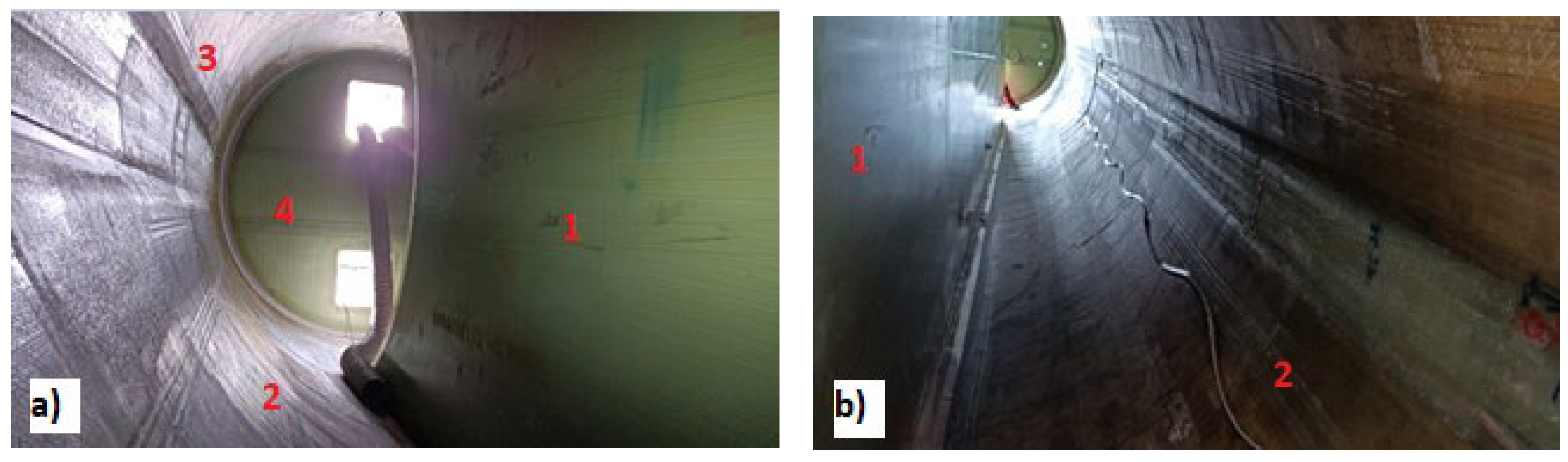
A view showing the blade from the inside is presented in
Figure 3a,b. These drawings reveal possibilities of placing suitable measuring sensors for diagnosing (online mode) possible damage, e.g., microcracks.
Each time a wind turbine is taken out of service, whether due to a failure or a planned inspection and maintenance shutdown, unproductive costs are generated. Wind-turbine condition monitoring along with machine learning tools has itself undergone many developments and improvements over the decades. However, an analysis [
7] has shown that there is no standardized, certified, and accredited method of using a non-invasive measurement technique to detect spots of potential damage in wind turbine blades. The use of non-invasive methods in the wind power industry is primarily based on the wind turbine operators’ own guidelines. The initial method of non-invasive damage detection was visual inspection and measurement by technical personnel. Typically, the sensitivity threshold here is quite low: damage is generally only seen (or heard) when it is at an advanced stage of development. The elastic waves of acoustic emission for machine and system diagnostics are used in the broadest sense [
3,
11,
18]. Thus, the use of wave relationships, or putting it more precisely, disturbances of the propagating elastic waves, was proposed and preliminarily tested for diagnosing wind turbine blade damage.
Acoustic emission, by definition, is the phenomenon of spontaneous or stress-induced elastic wave generation acting through plastic deformation, crack propagation, corrosion, collision, erosion, or leakage. It belongs to the group of passive methods, i.e., the AE device does not emit signals and does not affect the physical state of the object under test, but only records the physical effects that arise spontaneously in the monitored object. The sources of the acoustic emission elastic wave signal are, therefore, the formation and propagation of micro-cracks, corrosion processes, and material cracking in prestressed structures, but also internal material displacements. The elastic waves generated in the source propagate from the source in all directions in the volume of the object to be monitored. The elastic waves reach the sensor AE and are then transmitted to the analyser in the form of electrical voltage changes. The measuring apparatus consists of an AE sensor that converts the signal into a varying electrical voltage, an analyser that amplifies this voltage and eliminates signals not originating from the monitored source (acoustic background), and a device that records the AE wave signal. The acoustic emission frequency ranges from a fraction of a hertz to the order of a megahertz. Wang et al. [
19] described methods for diagnosing wind turbine blades using acoustic emissions. The results indicated that the best method for the detection of defect source growth caused by fatigue damage was using the triangle method to analyse the relative arrival time of the wave to the sensor with determination of the location of the defect growth. Another approach to acoustical damage detection of the WTB is presented by Chen et al. [
20], who applied the improved incremental support vector data description (SVDD) model. The physical method in combination with the filter and sliding window is able to detect sound pulses of the WTB from among strong background noise. The issue of using EA in the diagnosis of WTBs is most comprehensively described by Liu in reference [
21], while the list of strengths and weaknesses of the main methods based on acoustic emission testing in WTB was formulated by Marquez and Chacon [
5].
2.2. Assumptions of the Proposed Diagnostic Method
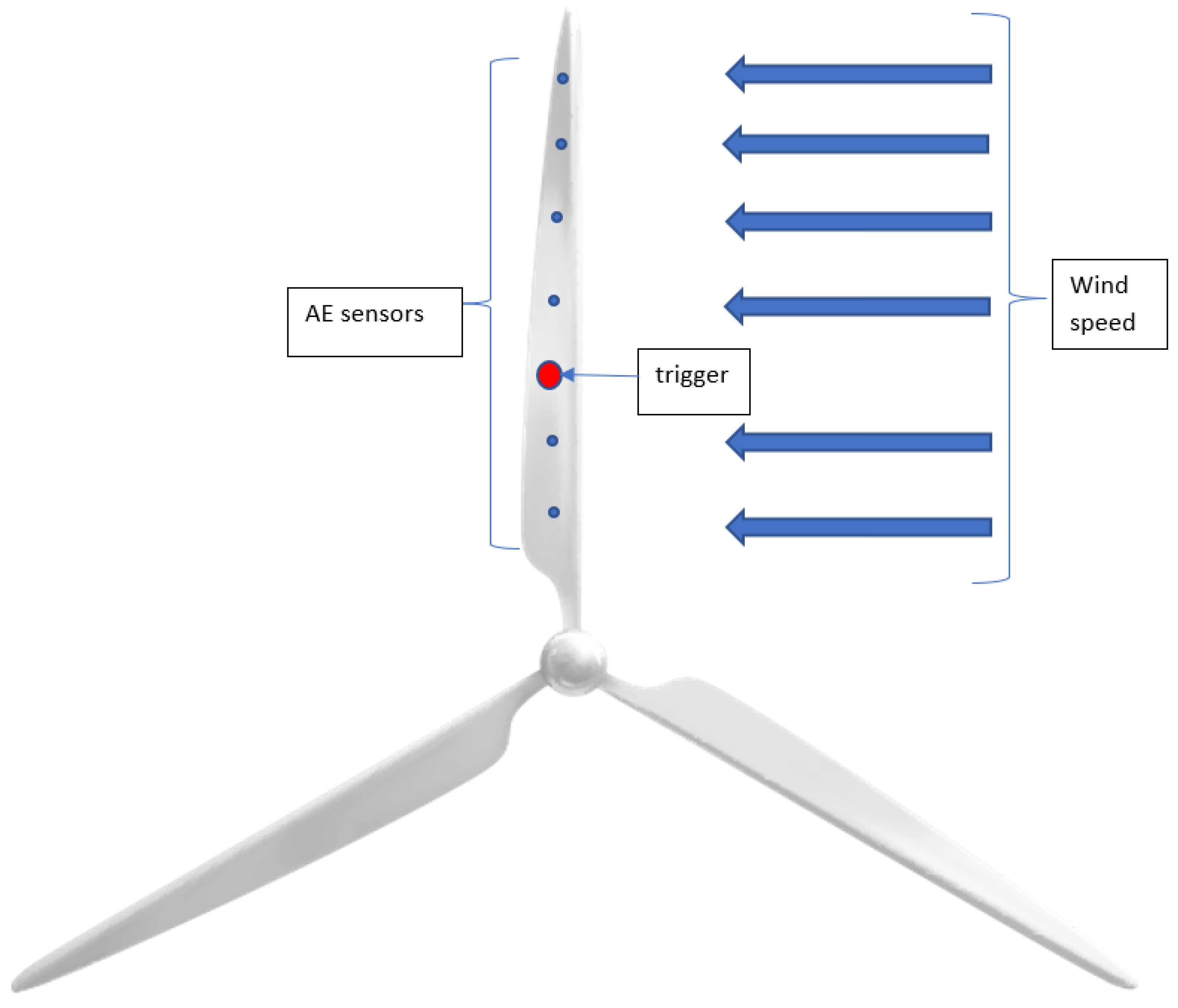
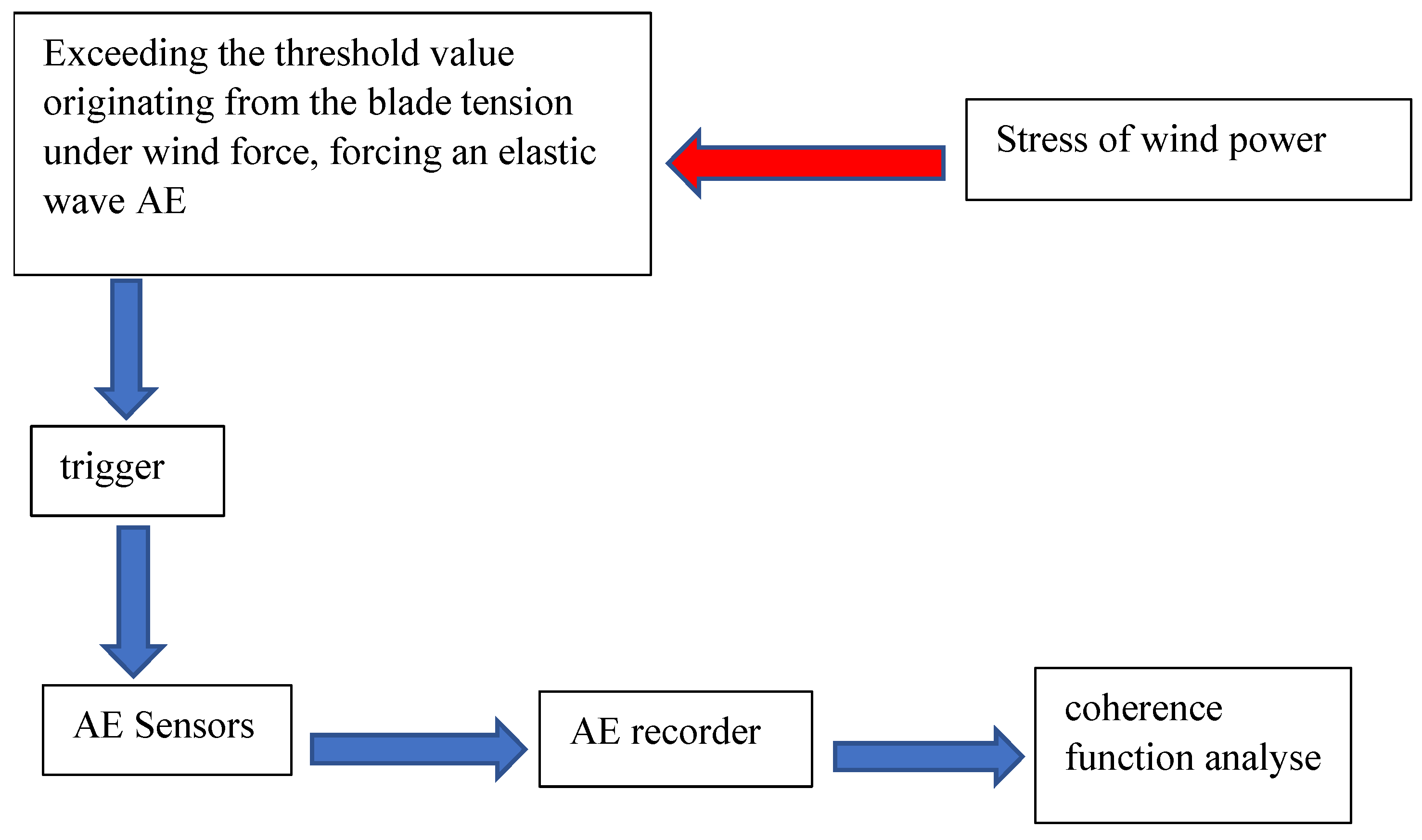
The method proposed by the authors of this article consists of placing a ‘line’ of interconnected acoustic emission sensors, triggering a measurement when a certain wind force is exceeded. An additional sensor (trigger) is connected to a stress sensor whose output signal depends on the force applied to the turbine blade and which, after obtaining the appropriate tension in the blade, starts the AE wave measurement process. This ensures the measurement repeatability of the tested and obtained signals. In this way, the signal triggers an acoustic emission measurement (
Figure 4). This arrangement ensures reproducible (comparable) conditions of the recorded elastic wave and allows for accurate comparison (using the coherence function) of individual “sections” of the blade of the diagnosed turbine. This makes it possible to precisely determine the place (location) of damage or discontinuity in the material. In tests using elastic acoustic emission waves, most measuring instruments have the possibility to set a so-called threshold value for the signal. In this case, the threshold value would be adjusted (set by the service technician) depending on where the turbine is installed—onshore or offshore, but could also be dependent on the probability of damage, e.g., depending on the operating time of the blades. The waveform recorded by such sensors at specified intervals is compared and analysed using a consistency function. Wind energy, by definition, is the energy content of air flow due to its motion. This type of energy is called kinetic energy and is a function of mass and velocity. The fundamental equation in wind power analysis is [
22,
23]:
where
cp—the coefficient of performance (efficiency factor, in percent),
ρ—air density (in kg/m
3),
r—the blade length (in meters), and
v—the wind speed (in m/s).
A power curve is made for each turbine, for which the output power is shown as a function of wind speed, where the rated (optimum) wind speed is highlighted. In the case of the scheme described in this article, the rated value is assumed (for the turbine under consideration), thus ensuring a constant and, therefore, repeatable internal tension of the turbine blade. In the simplest case, it is proposed to use a strain gauge sensor, which, when a specific blade stress value is exceeded, triggers the measurement of acoustic emission wave signals. In any case, it is possible to move the threshold of the stress value, which can depend on the design of a particular blade. Acoustic emission is generated by the corresponding state of stress acting on the internal structure. Disturbance of the signal changes the extracted dynamic system similarly to the application of modal analysis. By comparing the different ranges of emitted characteristic frequencies, we are able, using the coherence function, to determine the type of wave disturbance, and, thus, the type of damage to the structure.
The number of acoustic emission sensors installed depends on the length of the wind turbine blade. In the future, as technology develops, it may be possible to use a system of acoustic emission sensors installed every few tens of centimeters in a suitable composite fibre mounted in the turbine blade, similar to Fiber Bragg grating (FBG) sensors, which are commonly used for strain detection [
24]. Once the sensor is subjected to stress or temperature changes, the grating pitch changes, which affects the wavelength of the reflected light to meet the detection requirements.
The actual tests addressed the most typical blade damage, i.e., blade leading-edge spalling and general surface defects. The essence of turbine blade diagnostics is shown in
Figure 5. An acoustic emission recorder designed and manufactured at the Maritime University of Szczecin was used for the tests. In addition, to verify the correctness of the device’s operation, tests were carried out using a Pocket AE—Portable AE System type recorder from MISTRAS and a Wave 1002 measurement system from Vallen.
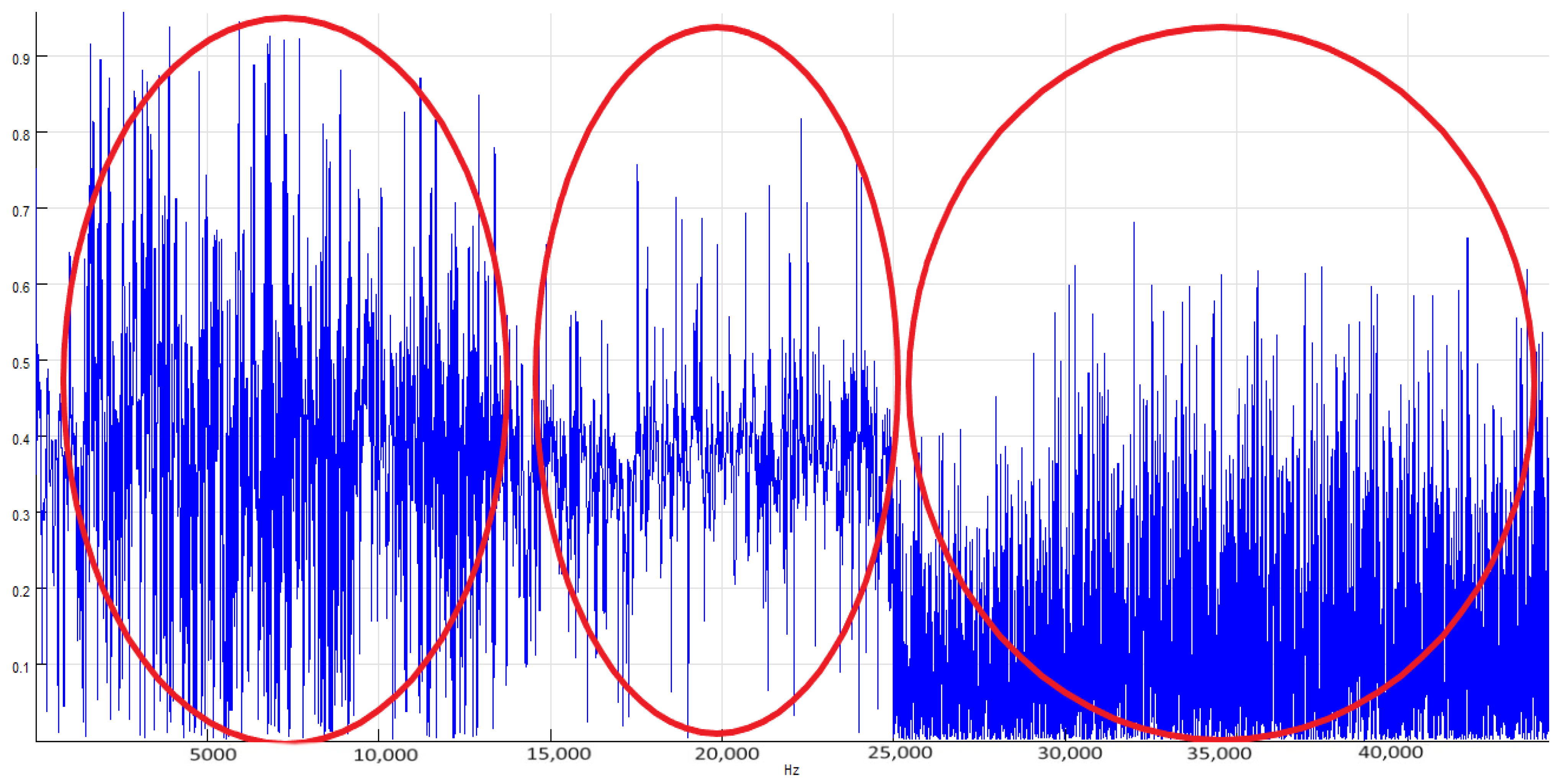
The elastic wave generated in the blade arrives at a trigger which, when it exceeds a preset threshold value, triggers a measurement with the AE sensors. The signals from the individual sensors reach the recorder, where they are, by means of a coherence function, compared with a reference wave (defect-free material). Its low value (not exceeding an average value of 0.8) in the band above 25 kHz indicates a high probability of damage to the wind turbine blade. The summed value of the coherence function is indicative of blade damage, while its detailed location is related to the identification of the specific AE sensor giving the highest deviation in the described descriptor.
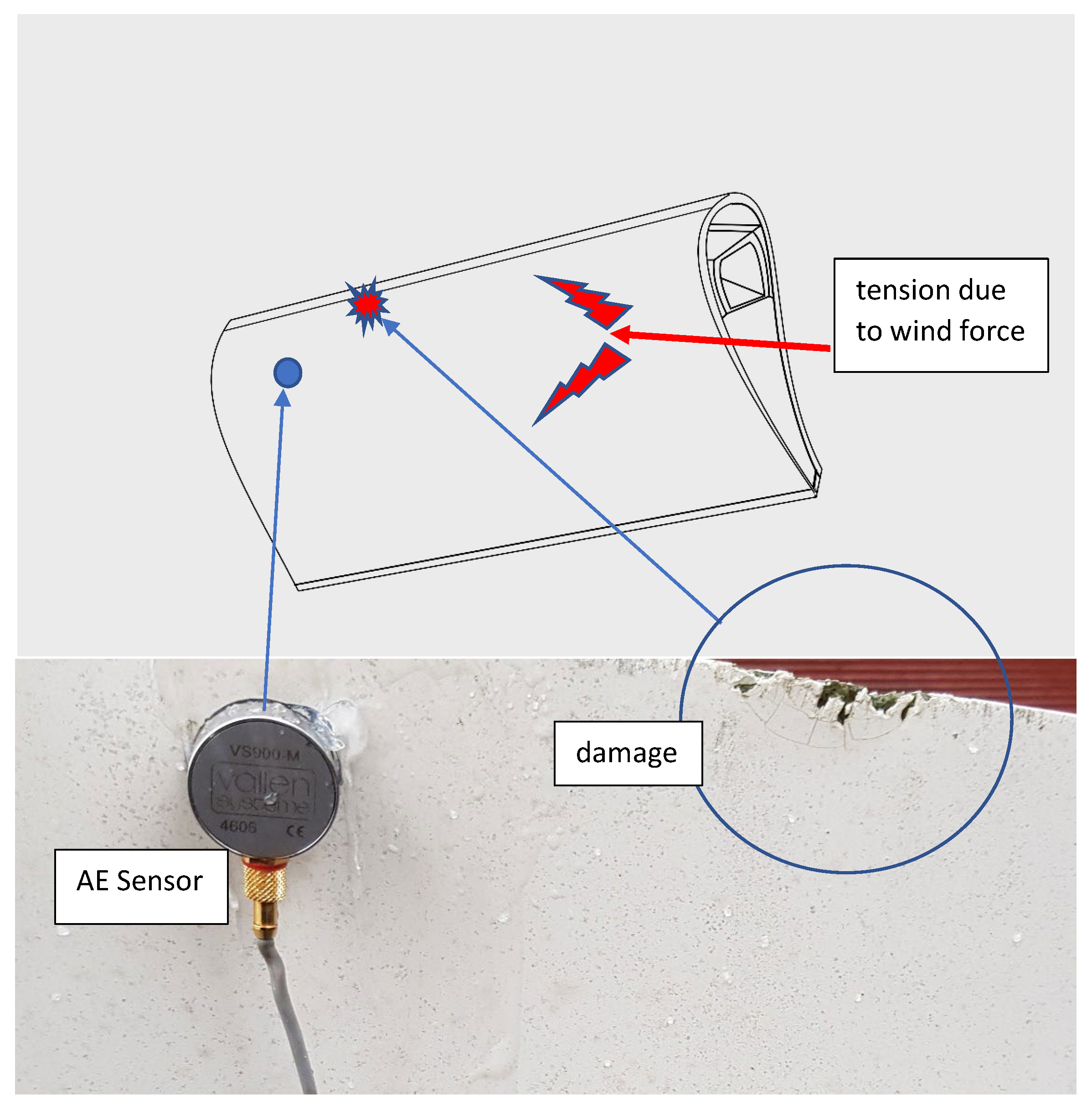
Figure 6 presents the measurement method and the location of the single AE sensor during the survey.
Vallen acoustic emission sensors were used in this study. However, similar results have been obtained using other sensors (with a similar frequency band), such as those from Physical Acoustics Corp. At present, there is no ready-made measurement system. To the authors’ knowledge, systems of interconnected AE microsensors spaced every few tens of centimeters in a fibre-optic element are already in laboratory testing. However, this is an element of the measurement path that can be modified in the future. The essence here is the method itself and the possibility of using it in damage analysis. The method described is a proposal that represents a possibility for identifying the condition of the blade under test. The use of a specific type of sensor is a separate area of research. In their work, the authors wanted to test and verify the essence of the proposed method for identifying the state of the blade and the effect of obtaining a correct diagnosis.
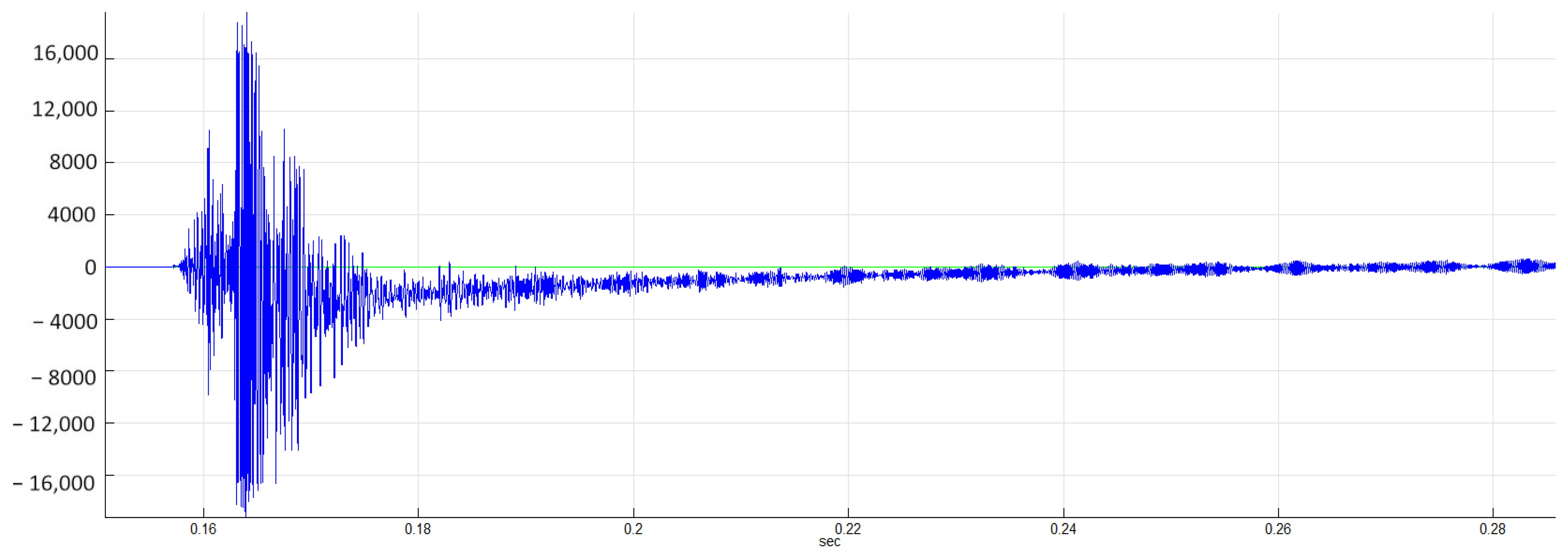
The acoustic emission signal, in the form of an elastic wave, was generated by means of a repetitive pulse generated on the surface of the blade.
Figure 7 shows the source signal—the pulse generated in an intact part. A clear difference in the time signal was recorded for an identical excitation in a blade with a defective leading edge (
Figure 8).
This provided grounds to suppose that a noticeable change in the generated (reaching the sensor) energy value of the recorded waveform could also be expected. The RMS (root mean square) value of the two signals was therefore compared [
25].
where
x(
t) is the value of the signal over a specific time interval.
In the simplest interpretation, RMS (as a measure of the periodically changing voltage signal generated at the AE sensor) determines the energy parameters of a signal. In the experiment, for the signal from the damaged part of the blade, the RMS value was 2469, while, for the same pulse in the part without defects, the RMS value was 2764. This difference can be explained in a relatively simple way. In the blade under test, at the point of damage to the leading edge, there is a change in the elastic characteristics, part of the energy of the wave reaching the sensor is scattered and reflected. The arriving AE source wave in the damaged area will, therefore, be disturbed and scattered and, consequently, its RMS value will decrease.
In order to determine the type of damage (for the application of online diagnosis) in an operating turbine, a more sophisticated method of signal analysis is, therefore, proposed. From a theoretical point of view, components made of high-strength composites tend to have strongly non-linear dynamic characteristics and their material constants e.g., equivalent Young’s modulus, are dependent on the magnitude and rate of the strain in a different manner than in commonly used rheological models (Voigt model) [
25]:
where
defines some replacement energy value;
f(
x) is a function of the solution vector of the system of differential equations (assuming that these equations exist). In the given equation, it is a non-linear function of the variable concerning displacements
x and velocity
ẋ.
If we assume that a system such as a wind turbine blade can be described by a mathematical function, even slight damage to the structure will change the elastic characteristics of this system. Consequently, there may be a change in the non-linear part of this characteristic for at least one generalised coordinate. Even if the damage does not generate any external symptoms (because only an internal crack will occur), there should be a change in the elastic characteristics of the system under test. In the course of this research, the authors’ basic guideline was to look for a measure of the signal propagating through the turbine blade structure, which would be defined on the non-linear part of the spectrum. Particularly in the case of an offshore power plant, it is possible to determine (find) stable (for comparable reference conditions) blade stresses under the influence of the acting wind.
The coherence function defines a linear relationship between two signals, a(t) and b(t), for a given frequency. Thus, it determines the degree of relationship between two signals by means of a linear function. The ordinary coherence function specified as part of the output signal is shaped by a linear transformation of the input signal. The coherence function is used to verify whether a linear relationship between two waveforms applies in a particular case. High coherence for a given frequency indicates that the two signals for that frequency have a high power concentration. The two functions are only equal to each other for an undistorted linear system. In any other case, the coherence function is less than unity. This function between two continuous waveforms, a(t) and b(t), is expressed by the equation [
25]:
where
is a power spectrum of the signal
a(
t),
is a power spectrum of the signal
b(
t), and
is a spectrum of the reciprocal power of the signals
a(
t) and
b(
t).
A high coherence for a given frequency indicates that the two signals for that frequency have a high power concentration. The coherence varies between 0 and 1. If γ
ab (
ω) is equal to 0 for all frequencies, it means that the functions
a(
t) and
b(
t) are uncorrelated for all frequencies. If
γab (
ω) is equal to 1 for all frequencies, the functions are fully correlated [
25,
26]. Coherence is proportional to the ratio of the level of the useful signal to the sum of the levels of the useful signal and the interfering signal (interference, wave dispersion). In other words, coherence is an indicator of the ratio of the useful signal to the noise (or more precisely to the total signal, i.e., useful signal plus noise), as a function of frequency. It can be assumed that coherence informs us about the ‘quality’ of the useful signal, i.e., the level of interference from unwanted signals. Unwanted or otherwise destructive interference results in the extinction or weakening of the useful signal.
In a classical frequency analysis, using the coherence function, we can isolate disturbances at the input or output of a system in a relatively simple way, provided that we know beforehand which type of disturbance is present. The problem, however, is how to interpret low values of the coherence function when the system is non-linear. If the coherence function is greater than zero but less than unity, it follows that:
- −
The system binding the signals together is non-linear;
- −
There are other unknown signals at the input of the system besides the observed input signal.
The appearance of a ‘new fault’ signal violates the coherence of the previous ones, which causes the coherence function to decrease.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}