
Enhancing Grid Operation with Electric Vehicle Integration in Automatic Generation Control






Abstract
:1. Introduction
1.1. Related Work
1.2. Our Contributions
- A comprehensive power system model has been developed, incorporating key generating units like TES, GTES, and WES. Furthermore, a comprehensive EVA model is developed, harnessing frequency control capabilities utilizing the concepts of positive and negative regulation capacities.
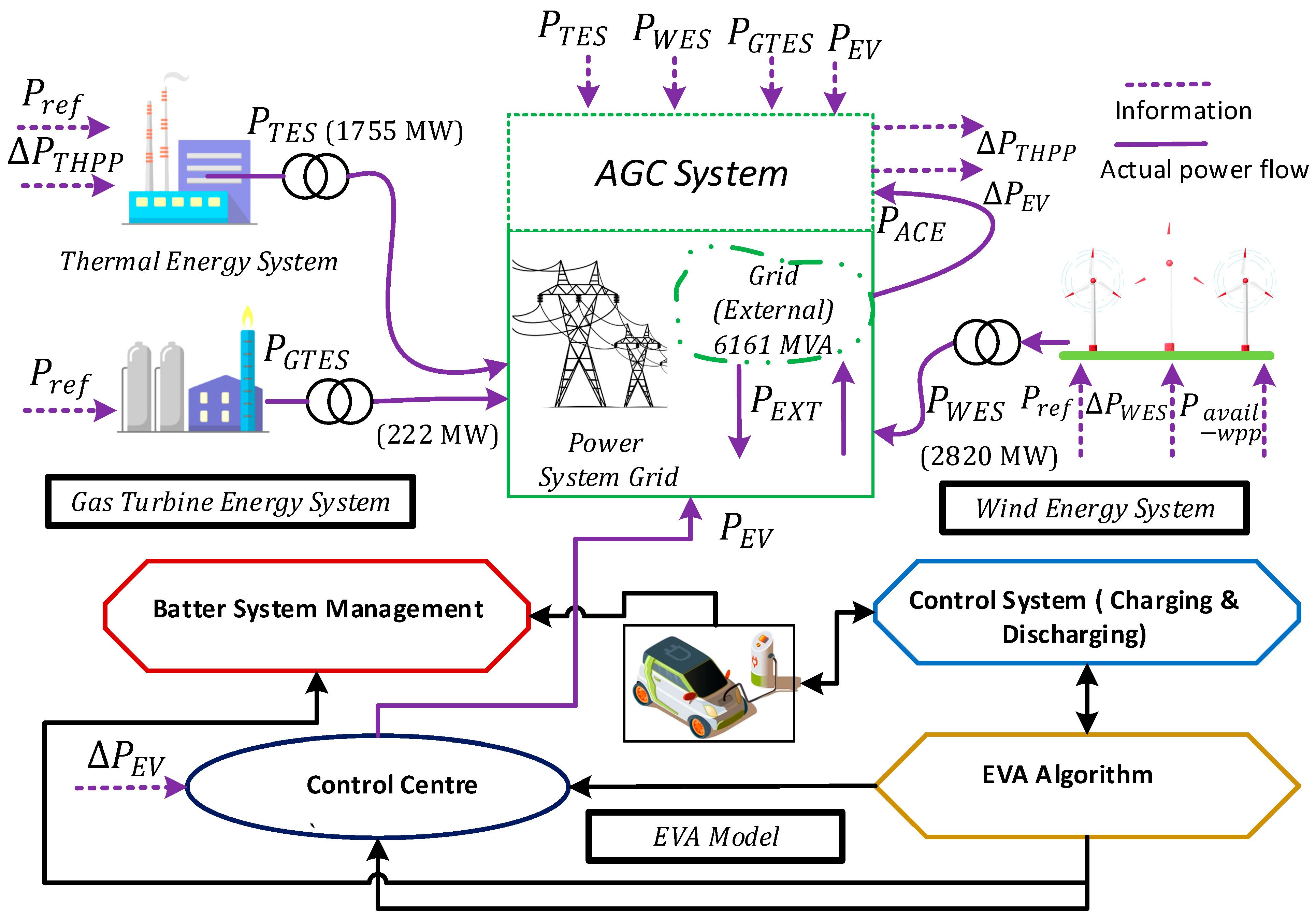
- A centralized AGC model for the proposed power system is developed to facilitate secondary frequency response and ensure power balancing operations.
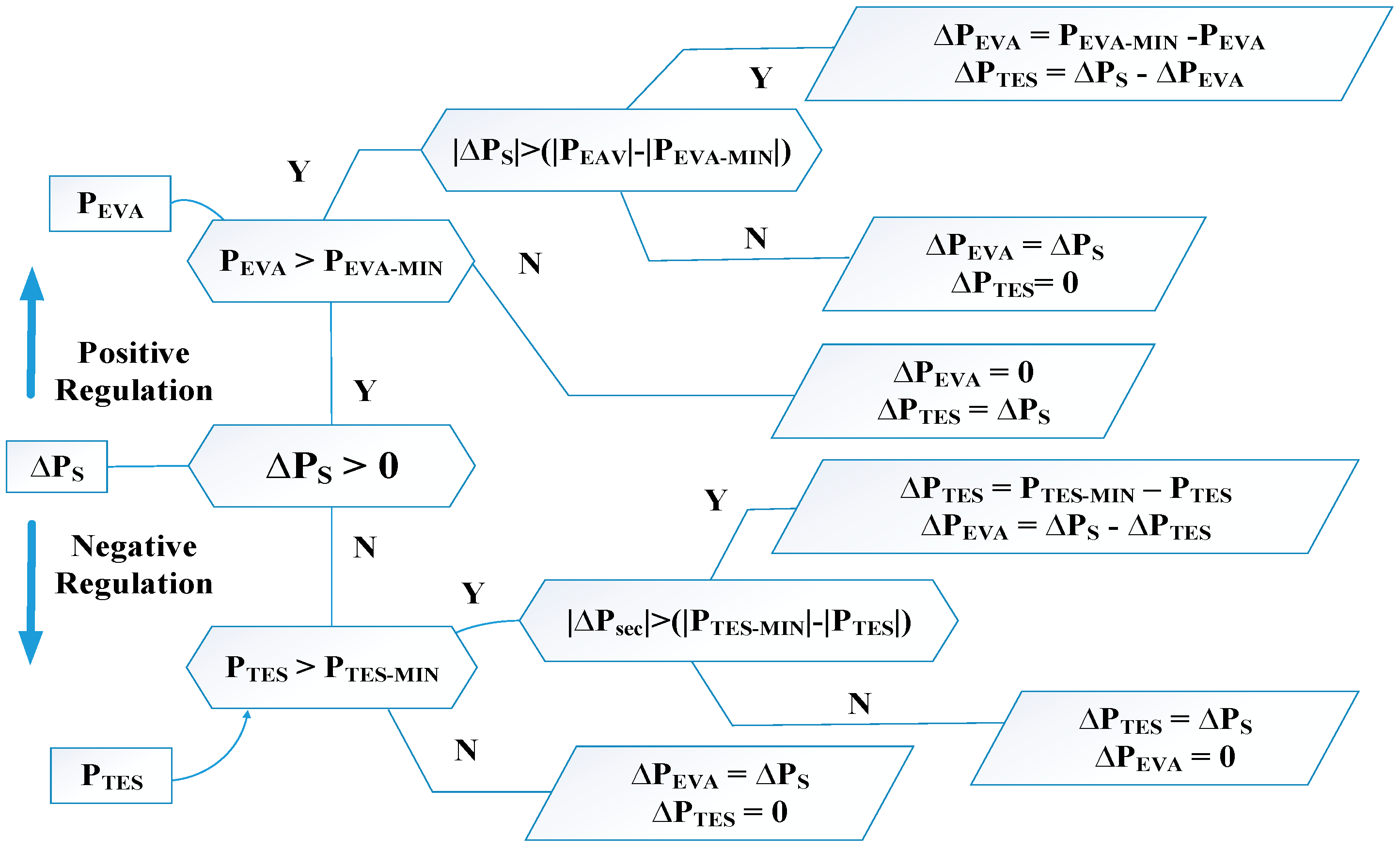
- A real-time dynamic dispatch strategy is formulated for the AGC model to efficiently integrate reserve capacities from the EVA model and prioritize its utilization over TES.
1.3. Paper Outline
2. Generating Units and EVA Modelling
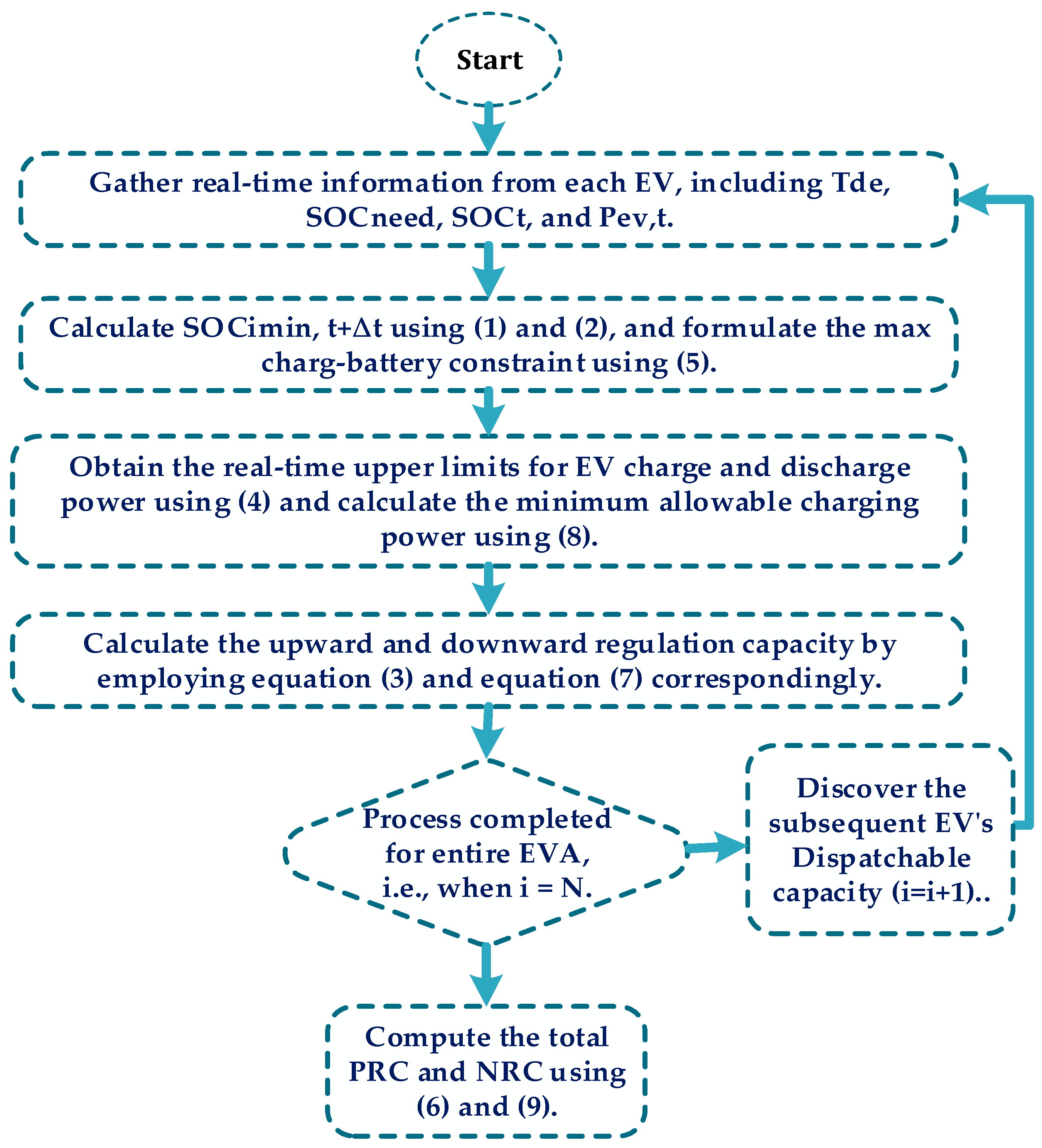
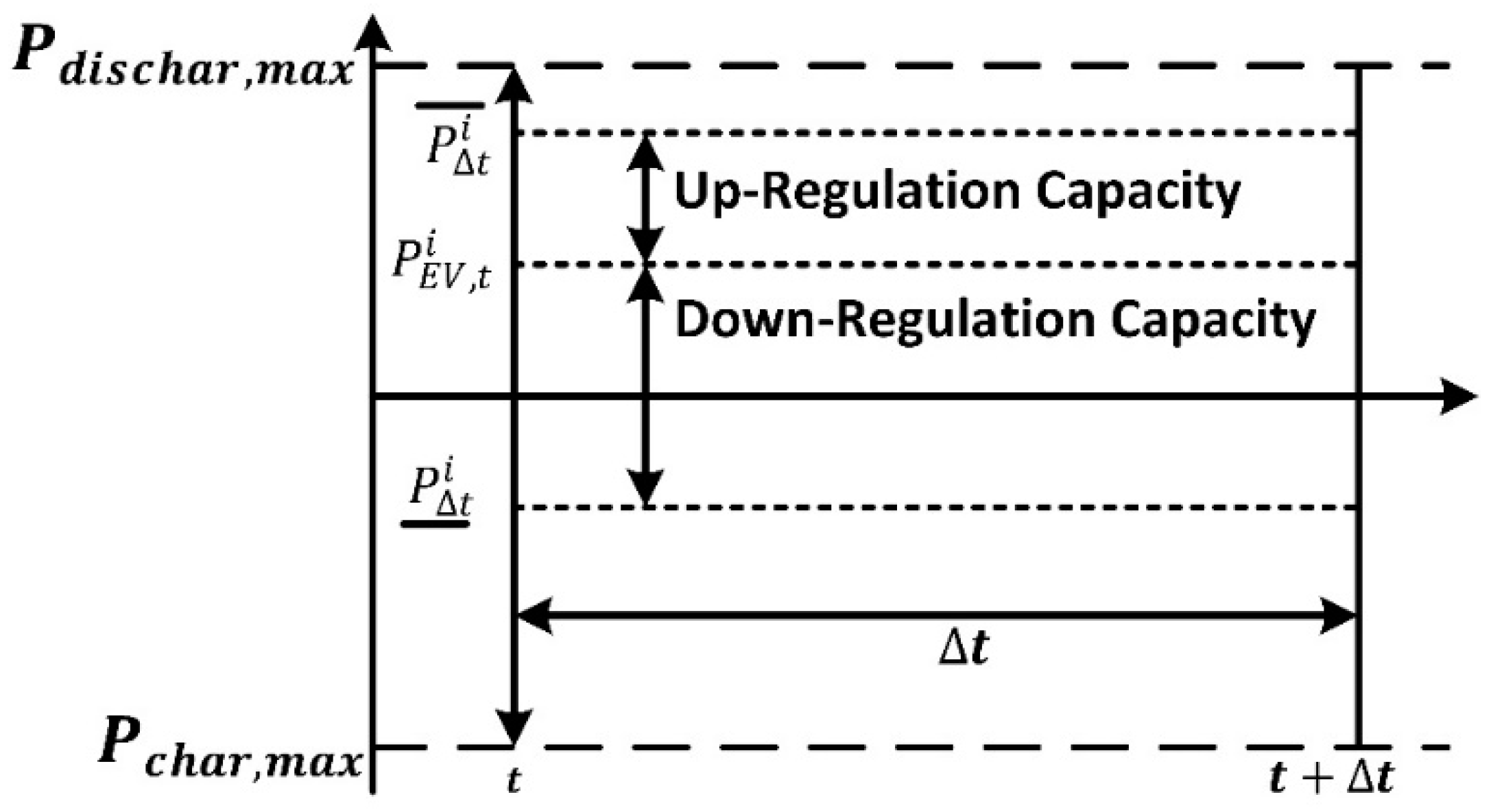
2.1. EVA Modelling for Grid Support
Regulation Capacities
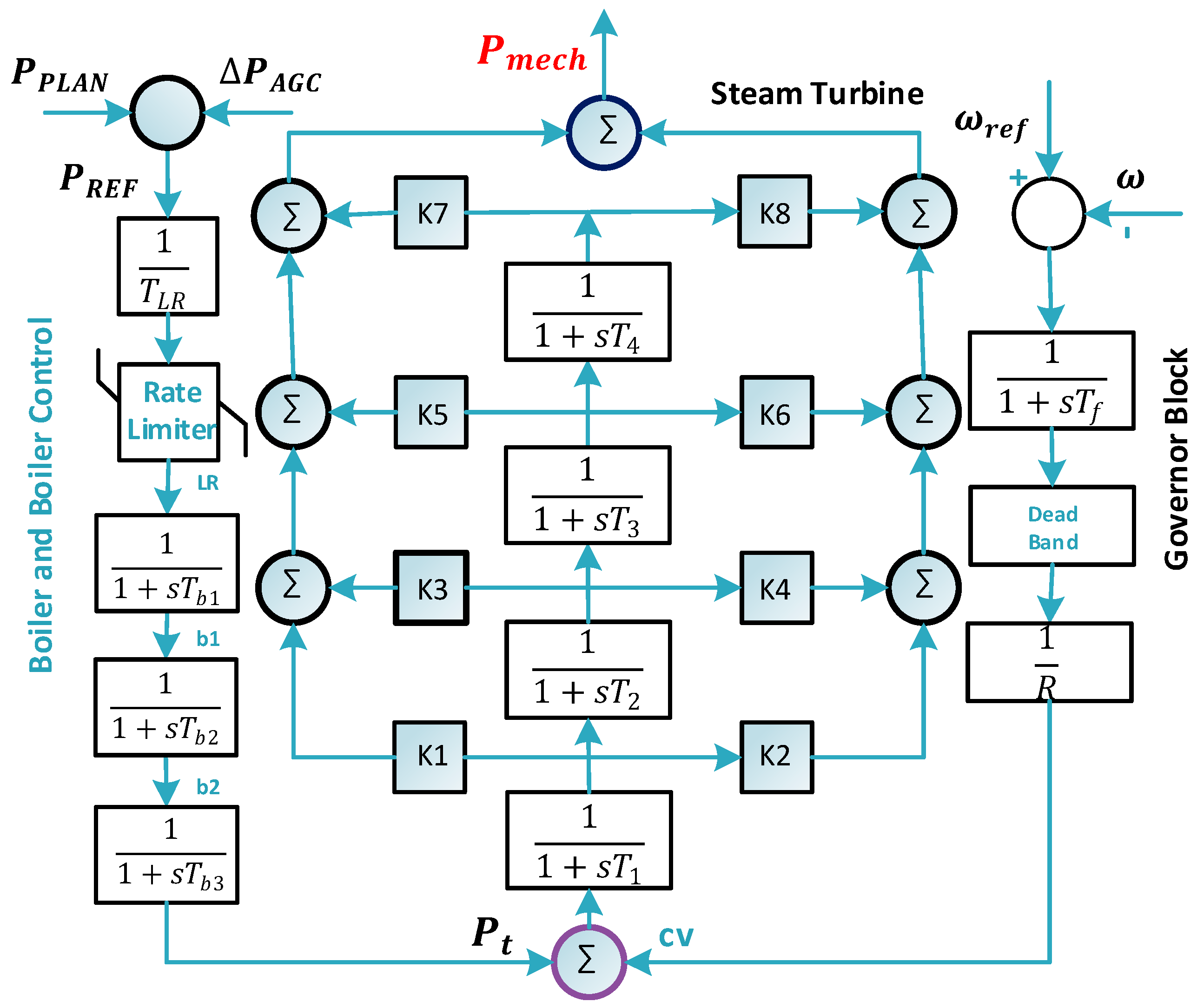
2.2. Modelling of the Thermal Energy System (TES)
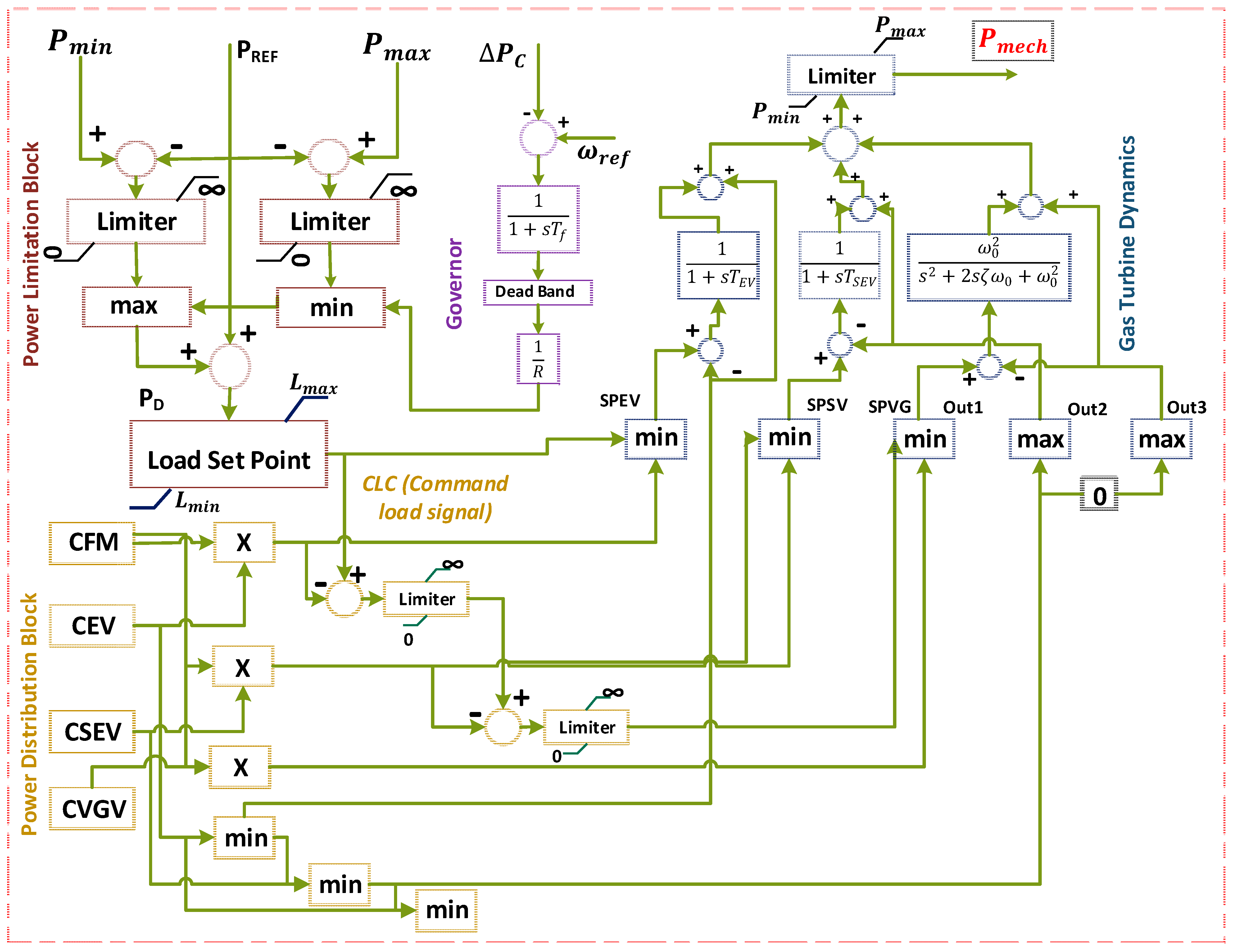
2.3. Modelling of Gas Turbine Energy System (GTES)
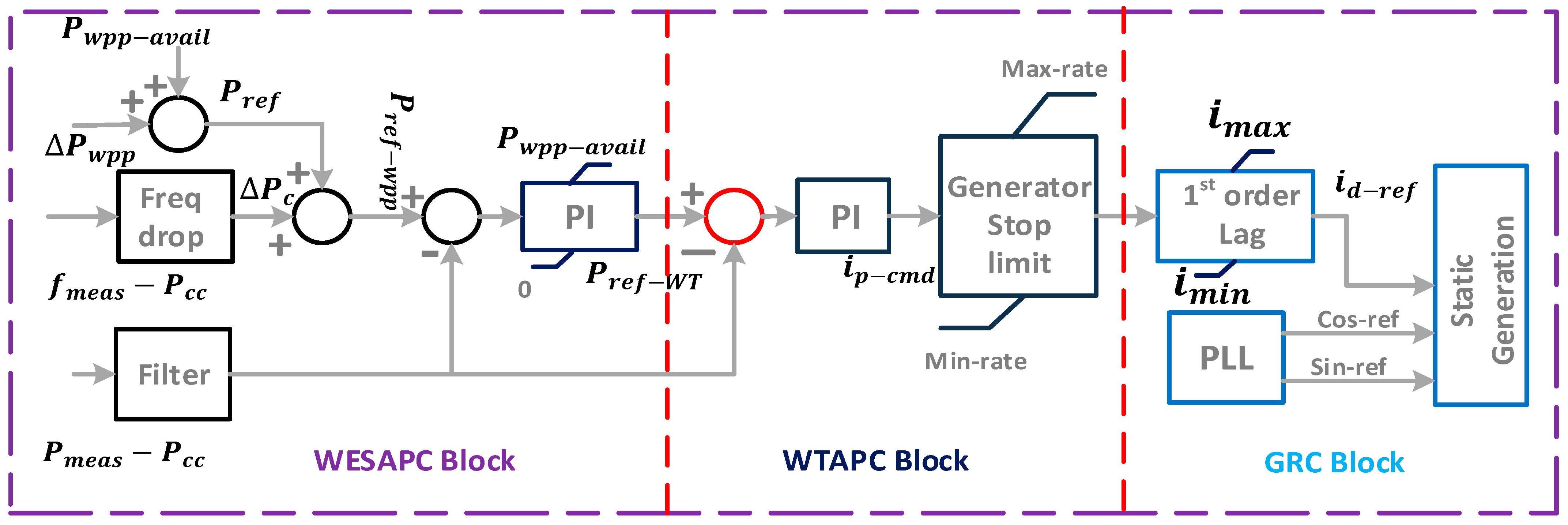
2.4. Modelling of Wind Energy System (WES)
3. AGC Modelling
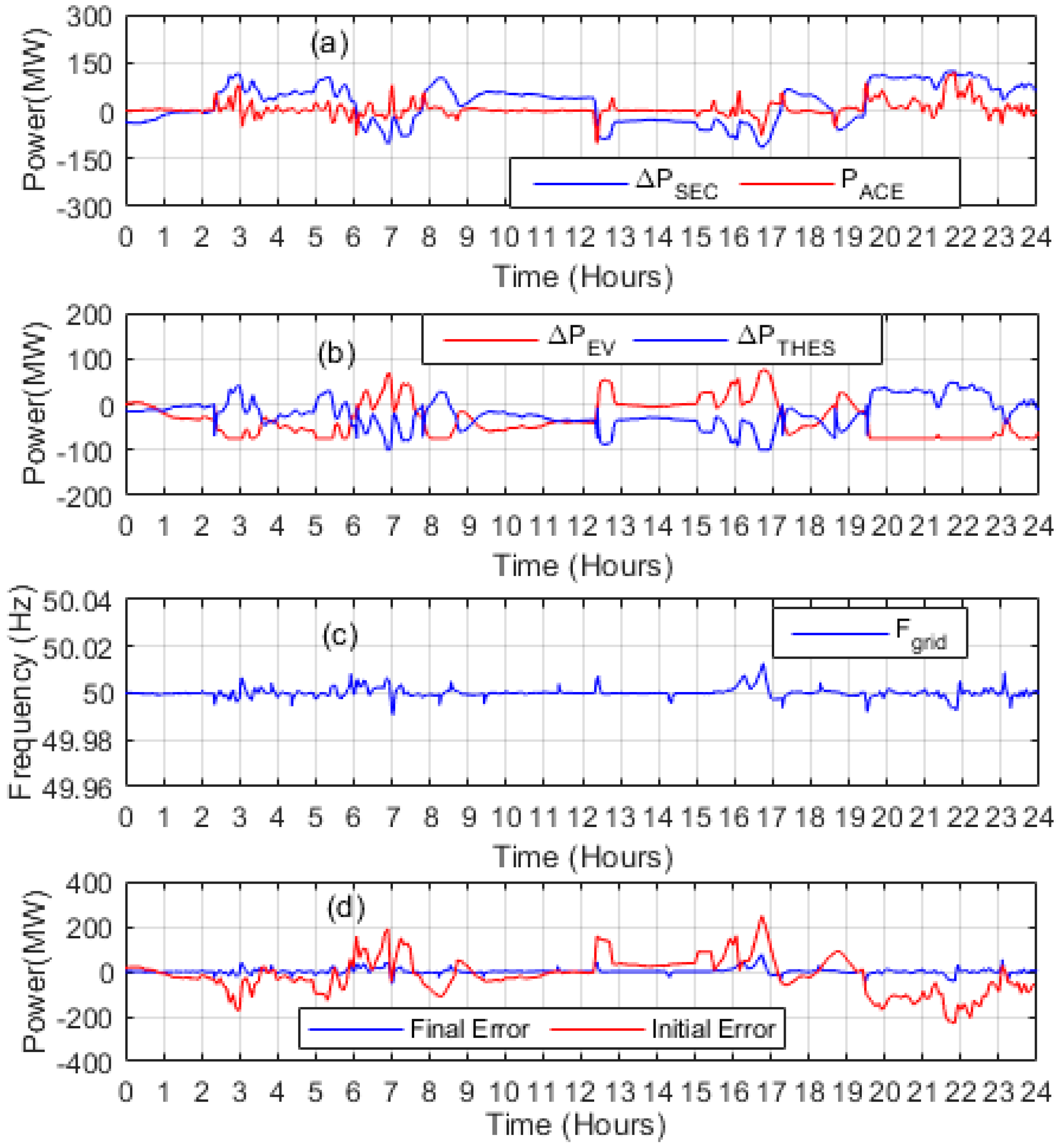
4. Performance Validation
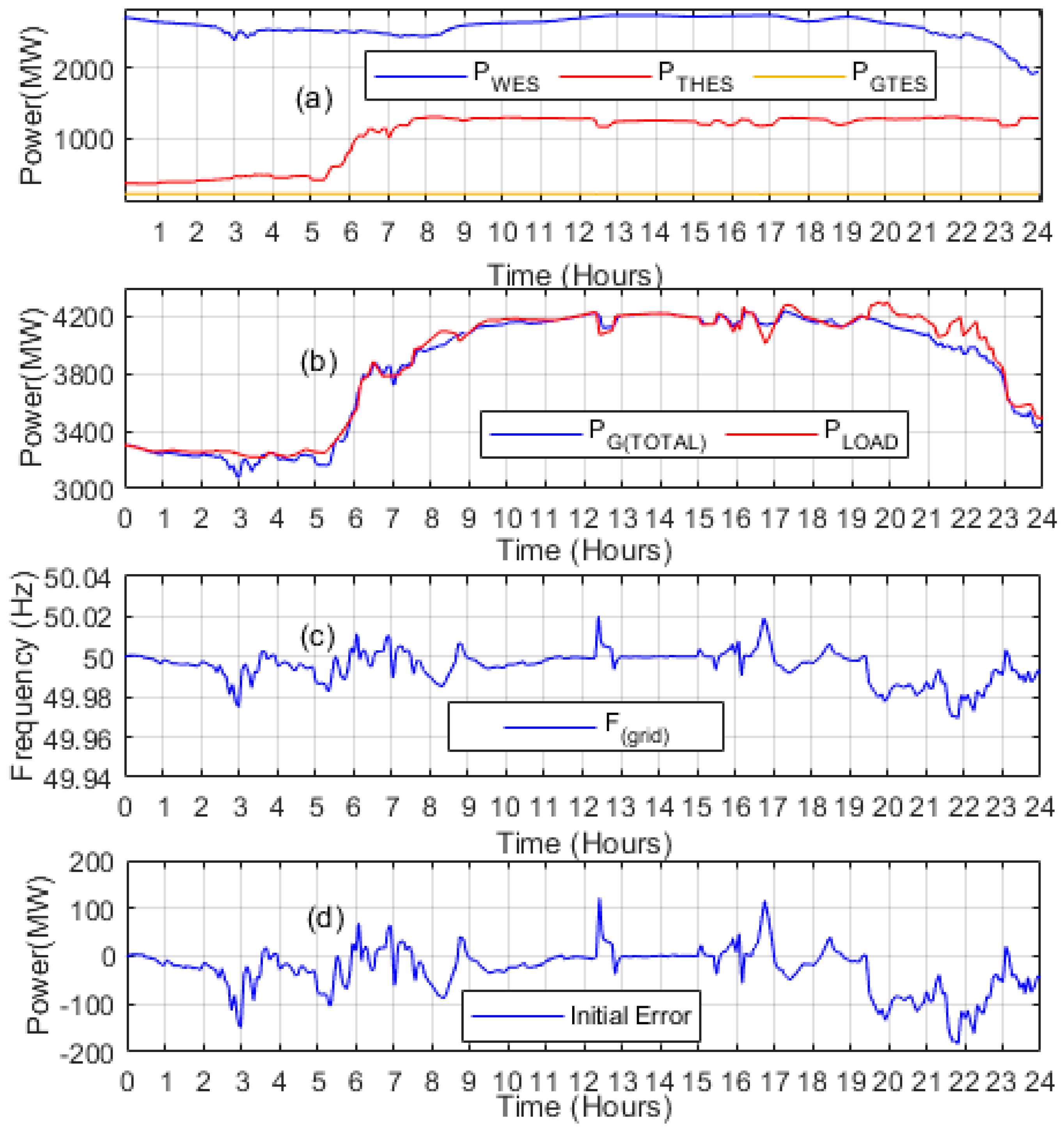
Case Study: Power Balancing through EVA and TES
5. Conclusions and Future Directions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Acronym | Definition |
| BESs | Battery Energy Storage System |
| PA | Up-regulation area |
| CESs | Capacitive Energy Storage System |
| CEV | Environmental Burning Capacity |
| CFM | Baseload function |
| CIGRE | International Council on Large Electric Systems |
| CSEV | Sequential Environmental burner capacity |
| CVGV | Variable inlet guide vane position compressor capacity |
| FCR | Frequency Containment Reserve |
| FRR | Frequency Regulation Reserves |
| GTDB | Gas turbine dynamics block |
| GTES | Gas Turbine Energy System |
| NRC | Negative regulation capacity |
| NA | Down-regulation area |
| PDB | Power distribution block |
| PLB | Power limitation block |
| PJM | Regional Transmission Company |
| RPS | Reference Power Signal |
| SEV | Sequential environmental combustion |
| SMA | Smart Management Approach |
| STC | Steam Temperature Control |
| SEV | Sequential environmental combustion |
| TSO | Transmission system operator |
| TES | Thermal Energy System |
References
- Lee, T.-Y. Optimal Spinning Reserve for a Wind-Thermal Power System Using EIPSO. IEEE Trans. Power Syst. 2007, 22, 1612–1621. [Google Scholar] [CrossRef]
- Nassar, I.A.; Abdella, M.M. Impact of replacing thermal power plants by renewable energy on the power system. Therm. Sci. Eng. Prog. 2018, 5, 506–515. [Google Scholar] [CrossRef]
- Albadi, M.; El-Saadany, E. Comparative study on impacts of wind profiles on thermal units scheduling costs. IET Renew. Power Gener. 2011, 5, 26–35. [Google Scholar] [CrossRef]
- Hashmi, M.H.; Ullah, Z.; Asghar, R.; Shaker, B.; Tariq, M.; Saleem, H. An Overview of the current challenges and Issues in Smart Grid Technologies. In Proceedings of the 2023 International Conference on Emerging Power Technologies (ICEPT), Topi, Pakistan, 6–7 May 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Hussain, S.; Lai, C.; Eicker, U. Flexibility: Literature review on concepts, modeling, and provision method in smart grid. Sustain. Energy Grids Netw. 2023, 35, 101113. [Google Scholar] [CrossRef]
- Asghar, R.; Fulginei, F.R.; Wadood, H.; Saeed, S. A Review of Load Frequency Control Schemes Deployed for Wind-Integrated Power Systems. Sustainability 2023, 15, 8380. [Google Scholar] [CrossRef]
- Ullah, K.; Ullah, Z.; Aslam, S.; Salam, M.S.; Salahuddin, M.A.; Umer, M.F.; Humayon, M.; Shaheer, H. Wind Farms and Flexible Loads Contribution in Automatic Generation Control: An Extensive Review and Simulation. Energies 2023, 16, 5498. [Google Scholar] [CrossRef]
- Asghar, R.; Ullah, Z.; Azeem, B.; Aslam, S.; Hashmi, M.H.; Rasool, E.; Shaker, B.; Anwar, M.J.; Mustafa, K. Wind Energy Potential in Pakistan: A Feasibility Study in Sindh Province. Energies 2022, 15, 8333. [Google Scholar] [CrossRef]
- Guille, C.; Gross, G. A conceptual framework for the vehicle-to-grid (V2G) implementation. Energy Policy 2009, 37, 4379–4390. [Google Scholar] [CrossRef]
- Khooban, M.-H. Secondary Load Frequency Control of Time-Delay Stand-Alone Microgrids With Electric Vehicles. IEEE Trans. Ind. Electron. 2017, 65, 7416–7422. [Google Scholar] [CrossRef]
- Li, Z.; Su, S.; Jin, X.; Chen, H.; Li, Y.; Zhang, R. A hierarchical scheduling method of active distribution network considering flexible loads in office buildings. Int. J. Electr. Power Energy Syst. 2021, 131, 106768. [Google Scholar] [CrossRef]
- Mignoni, N.; Scarabaggio, P.; Carli, R.; Dotoli, M. Control frameworks for transactive energy storage services in energy communities. Control Eng. Pract. 2023, 130, 105364. [Google Scholar] [CrossRef]
- Venkatesan, K.; Govindarajan, U. Optimal power flow control of hybrid renewable energy system with energy storage: A WOANN strategy. J. Renew. Sustain. Energy 2019, 11, 015501. [Google Scholar] [CrossRef]
- Hernández, J.; Sanchez-Sutil, F.; Vidal, P.; Rus-Casas, C. Primary frequency control and dynamic grid support for vehicle-to-grid in transmission systems. Int. J. Electr. Power Energy Syst. 2018, 100, 152–166. [Google Scholar] [CrossRef]
- Falahati, S.; Taher, S.A.; Shahidehpour, M. A new smart charging method for EVs for frequency control of smart grid. Int. J. Electr. Power Energy Syst. 2016, 83, 458–469. [Google Scholar] [CrossRef]
- Giordano, F.; Arrigo, F.; Diaz-Londono, C.; Spertino, F.; Ruiz, F. Forecast-Based V2G Aggregation Model for Day-Ahead and Real-Time Operations. In Proceedings of the 2020 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 17–20 February 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Diaz-Londono, C.; Gruosso, G.; Maffezzoni, P.; Daniel, L. Coordination Strategies for Electric Vehicle Chargers Integration in Electrical Grids. In Proceedings of the 2022 IEEE Vehicle Power and Propulsion Conference (VPPC), Merced, CA, USA, 1–4 November 2022; IEEE: Piscataway, NJ, USA; pp. 1–6. [Google Scholar]
- Diaz-Londono, C.; Vuelvas, J.; Gruosso, G.; Correa-Florez, C.A. Remuneration Sensitivity Analysis in Prosumer and Aggregator Strategies by Controlling Electric Vehicle Chargers. Energies 2022, 15, 6913. [Google Scholar] [CrossRef]
- Mignoni, N.; Carli, R.; Dotoli, M. Distributed Noncooperative MPC for Energy Scheduling of Charging and Trading Electric Vehicles in Energy Communities. IEEE Trans. Control Syst. Technol. 2023, 31, 2159–2172. [Google Scholar] [CrossRef]
- Hosseini, S.M.; Carli, R.; Parisio, A.; Dotoli, M. Robust Decentralized Charge Control of Electric Vehicles under Uncertainty on Inelastic Demand and Energy Pricing. In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, 11–14 October 2020; pp. 1834–1839. [Google Scholar] [CrossRef]
- Knezovic, K.; Martinenas, S.; Andersen, P.B.; Zecchino, A.; Marinelli, M. Enhancing the Role of Electric Vehicles in the Power Grid: Field Validation of Multiple Ancillary Services. IEEE Trans. Transp. Electrif. 2016, 3, 201–209. [Google Scholar] [CrossRef]
- Falvo, M.C.; Sbordone, D.; Bayram, I.S.; Devetsikiotis, M. EV charging stations and modes: International standards. In Proceedings of the IEEE International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Ischia, Italy, 18–20 June 2014; pp. 1134–1139. [Google Scholar]
- Cui, Y.; Hu, Z.; Luo, H. Optimal Day-Ahead Charging and Frequency Reserve Scheduling of Electric Vehicles Considering the Regulation Signal Uncertainty. IEEE Trans. Ind. Appl. 2020, 56, 5824–5835. [Google Scholar] [CrossRef]
- Tushar, M.H.K.; Zeineddine, A.W.; Assi, C.M. Demand-Side Management by Regulating Charging and Discharging of the EV, ESS, and Utilizing Renewable Energy. IEEE Trans. Ind. Inform. 2018, 14, 117–126. [Google Scholar] [CrossRef]
- Liu, H.; Qi, J.; Wang, J.; Li, P.; Li, C.; Wei, H. EV Dispatch Control for Supplementary Frequency Regulation Considering the Expectation of EV Owners. IEEE Trans. Smart Grid 2016, 9, 3763–3772. [Google Scholar] [CrossRef]
- Pham, T.N.; Trinh, H.; Van Hien, L. Load Frequency Control of Power Systems With Electric Vehicles and Diverse Transmission Links Using Distributed Functional Observers. IEEE Trans. Smart Grid 2015, 7, 238–252. [Google Scholar] [CrossRef]
- Sanki, P.; Basu, M.; Pal, P.S.; Das, D. Application of a novel PIPDF controller in an improved plug-in electric vehicle integrated power system for AGC operation. Int. J. Ambient. Energy 2021, 43, 4767–4781. [Google Scholar] [CrossRef]
- Khezri, R.; Oshnoei, A.; Hagh, M.T.; Muyeen, S. Coordination of Heat Pumps, Electric Vehicles and AGC for Efficient LFC in a Smart Hybrid Power System via SCA-Based Optimized FOPID Controllers. Energies 2018, 11, 420. [Google Scholar] [CrossRef]
- Gruoup, I.W. Dynamic Models For Fossil FUELED Steam Units In Power System Studies. IEEE Trans. Power Syst. 1991, 6, 753–761. [Google Scholar]
- Suwannarat, A. Integration and Control of Wind Farms in the Danish Electricity System; Institut for Energiteknik, Aalborg Universitet: Aalborg East, Denmark, 2008; Available online: https://vbn.aau.dk/ws/portalfiles/portal/7254073/Suwannarat.pdf (accessed on 13 September 2023).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Generating Units (MW) | TES | GTES | WES | EVA |
|---|---|---|---|---|
| Maximum Power (MW) | 1755 | 222 | 2820 | |
| Operating Reserves (MW) | 0 | −500 |
| Case Studies | Up-Regulation Area () | Down-Regulation Area () | % Reduction in Positive Regulation Error | % Reduction in Negative Regulation Error |
|---|---|---|---|---|
| Initial Error | 3.137 | 4.135 | 0.00% | 0.00% |
| Case Study | 0.3471 | 0.2145 | 90.0% | 93.25% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ullah, Z.; Ullah, K.; Diaz-Londono, C.; Gruosso, G.; Basit, A. Enhancing Grid Operation with Electric Vehicle Integration in Automatic Generation Control. Energies 2023, 16, 7118. https://doi.org/10.3390/en16207118
Ullah Z, Ullah K, Diaz-Londono C, Gruosso G, Basit A. Enhancing Grid Operation with Electric Vehicle Integration in Automatic Generation Control. Energies. 2023; 16(20):7118. https://doi.org/10.3390/en16207118
Chicago/Turabian StyleUllah, Zahid, Kaleem Ullah, Cesar Diaz-Londono, Giambattista Gruosso, and Abdul Basit. 2023. "Enhancing Grid Operation with Electric Vehicle Integration in Automatic Generation Control" Energies 16, no. 20: 7118. https://doi.org/10.3390/en16207118
APA StyleUllah, Z., Ullah, K., Diaz-Londono, C., Gruosso, G., & Basit, A. (2023). Enhancing Grid Operation with Electric Vehicle Integration in Automatic Generation Control. Energies, 16(20), 7118. https://doi.org/10.3390/en16207118