Abstract
The article reviews the existing methods of increasing the energy efficiency of electric transport by analyzing and studying the methods of increasing the energy storage resource. It is grouped according to methods, approaches, and solutions. The most effective methods and ways of their implementation are identified. General methods of increasing energy efficiency, methods of increasing recuperation during braking, methods of energy-efficient energy consumption, the use of energy-saving technologies, and improving the energy efficiency of the traction drive are considered. The purpose of this work is to identify the main operating factors on the basis of a critical review of existing methods for assessing the technical condition of batteries and experimental results on the degradation of lithium-ion batteries. Using the great experience of the research group in the field of modeling, diagnostics, and forecasting of life of electric cars, as well as their intellectual management, the new theoretical and practical methods of integrated assessment of the parameters of the traction battery and state of charge, which are operated in the heavy forced regenerative regimes of electric traction, are created and proposed. A great role is played by the construction of the transport model. The development is based on physical laws that passengers and vehicle owners are unaware of. For each model there is a different area of application, and what is suitable for one object may not be suitable for another. The overview shows that there is no one-size-fits-all way to improve energy efficiency. It is necessary to make a choice among several proposed models after a thorough feasibility study.
1. Introduction
Current trends in the automotive industry are aimed at increasing the production of vehicles equipped with hybrid or all-electric powertrains. Currently, more than 50% of the production of batteries (Batteries) and electric vehicles is located in China. Over the past decade, the largest automobile concerns, BYD, Geely, and JAC, have been developed, and corporations for the production of batteries, such as CATL, have been created. CATL batteries with an energy capacity of 240 W∙h/kg are significantly superior to their global counterparts. A plug-in hybrid electric vehicle (PHEV) is a hybrid electric vehicle whose battery pack can be recharged by plugging a charging cable into an external electric power source, in addition to internally by its on-board internal combustion engine-powered generator. According to [1,2], in Norway, the share of electric vehicles sold was 75.1%. These vehicles included all-electric (EV) and PHEV. At the same time, the share of sales of cars with internal combustion engines fell to a record 17.7%.
According to the IEA, lithium-ion batteries (LIA) will remain the main type of battery used in electric vehicles. Currently, Li-Ion batteries amount up to 45% of the cost of an EV. This assumes an average service life of 5 years in the modes recommended by the manufacturer. The distinctive feature of battery operation modes in electric vehicles (EVs) is the uneven load associated with road conditions, as well as the high cyclicality (reversibility) of the charge/discharge processes due to the energy recovery of the battery in the electric braking mode. When operating the ETS, the battery operates in heavy forced modes with load current fluctuations and randomly changes in time charge/discharge cycles, frequency, and duration of change in charge/discharge cycles, as well as a wide range of temperatures. All of these factors significantly affect the degradation of electrode materials, changing the operating parameters of the battery, which leads to deterioration of the characteristics and accelerated battery wear. Thus, wide application of AB as a part of EFV requires solving a whole range of problems of effective management of the modes of discharge/charge, determining the factors affecting the ageing processes of AB, as well as determining the optimal modes of control of the power unit of EFV without deteriorating the dynamic properties. AB service life is an important economic and technological factor that affects the rate of production of autonomous vehicles. Therefore, the study of issues related to increasing the service life and improving the energy efficiency of the use of batteries is an urgent task.
Energy efficiency methods usually differ from other methods. That is, for any given vehicle, there is one effective way to increase energy. The methods can be both innovative and “old”, but time-tested. For example, one of such methods is the introduction of regenerative and rheostat braking; such method has been modernized: if it was impossible before to supply energy to the network (for contact electric transport), energy was consumed for braking rheostats. Nowadays, the battery is used instead of rheostats.
Since the price of resources has increased, the emergence of new energy sources and tightening environmental requirements raise the issue of creating and developing energy-efficient electric transport that is necessary for understanding the essence, the principle of expediency of energy-saving technologies. Therefore, the task of the work is to generalize and systematize the methods for increasing energy efficiency proposed in this paper. This will allow for evaluating the qualitative efficiency of the methods (how much energy can be saved by applying one or another method) and the feasibility of applying these very methods.
In order to systematize the material of this article, devoted to methods for improving the energy efficiency of electric transport, it was proposed to divide it into certain thematic groups:
- Prospective directions for increasing the energy efficiency of electric transport (Section 3).
- Regenerative braking (Section 3.1).
- Energy-efficient battery consumption (Section 3.2).
- Application of energy-saving technologies in the electric transport complex (Section 3.3).
- Increasing the efficiency of energy storage devices (Section 3.4).
- Energy-efficient electric vehicle traction drive (Section 3.5).
2. Materials and Methods
In this paper, the existing research of the methods for improving the energy efficiency of electric vehicles by optimizing battery consumption was reviewed. For the analysis, research and review papers dating back to 2015 were selected. Since the topic of energy saving on electric vehicles using battery power is very relevant [1,2], a cross-section of publications over last 5 years has been deliberately highlighted, that is, the analysis has been focused on new research works. At the same time, classical works have also been considered in detail, mainly those that reflect the main directions of development of the topic on energy saving and increasing the energy efficiency of the electric transport complex.
A comparative analysis of the works reflecting the methods used to improve the energy efficiency of electric vehicles in terms of their distance traveled (for personal electric vehicles) or the number of carried passengers (for public electric transport) was undertaken. The results of the work achieved by the authors will be demonstrated in Section 3. This section will be divided into five subsections. In these sections, the work in five main areas of development of the topic of energy efficiency of electric transport will be considered, including regenerative braking, battery charge consumption, electric transport complex, energy storage devices, and traction drive operation. In the last section, a brief conclusion about the prospects for the development of energy-saving technologies for electric transport will be made.
Before focusing on specific methods that improve the energy efficiency of vehicles, the classification of these methods used in this study will be defined in terms of belonging to physical objects (batteries, electric drive and other electrical objects) and to the processes that occur during the operation of electric vehicles (energy-efficient consumption of battery energy, regenerative braking, general energy-saving technologies, and their implementation in electric vehicles). There are different classifications of the methods for improving the energy efficiency of vehicles. One of them has been developed by the authors of this work and is presented in Figure 1.
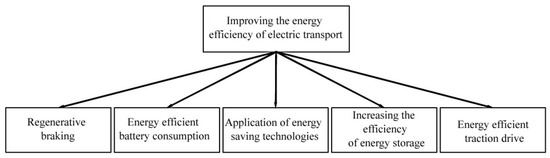
Figure 1.
Schematic grouping of the main methods to improve the energy efficiency of the electric vehicle.
The differentiation of methods by unit type and by energy conversion processes occurring in electric vehicles allowed for a more detailed study of the methods most effectively used to improve the energy efficiency of vehicles. Differentiating the methods in this way can improve the understanding of the technical literature in this area. Structuring the methods allows defining the key features and possibilities of their application in specific conditions. This can be done for various types of electric transport (passenger, freight, special-purpose).
In accordance with this, a qualitative comparative analysis of the methods aimed at improving energy efficiency in the studies under consideration was made. In each subparagraph of Section 3 a separate process is demonstrated, proposed in one way or another to increase efficiency in terms of energy consumption, including the most and least efficient ways in terms of the amount of saved energy. Most of the reviewed methods can be applicable to electric vehicles, but particular papers deal with other modes of transportation. Before analyzing the methods, the methods were grouped, which is presented in the diagram (Figure 1).
It should also be noted that when working on this review, the authors identified the main drawback of empirical studies of a significant number of works. The results obtained by researchers in these works are extremely important, but they are difficult to reproduce. This is due to significant differences in the initial conditions and conditions of the work. Often these studies lack data to compare them with other studies. The results may not be sufficiently detailed. These and other reasons make it difficult to both objectively and comparatively evaluate the work. Based on this, authors and researchers can be recommended to take into account the qualitative features of the used methods. Most often, quantitative estimates are indicated; the addition of qualitative estimates allows facilitating the subsequent comparative analysis of the work. It is also important to pay attention to the specifics of the subject area and to assess the possibilities of applying the methods in various specific conditions. Attempts have been made to present the results of a comparative analysis of the most common ways to reduce energy costs for different driving cycles of electric vehicles. The most promising ways have been identified. In the review, the quantitative indicators and conditions for the application of various methods of saving energy costs have been analyzed.
3. Prospective Directions for Increasing the Energy Efficiency of Electric Transport
Improving the energy efficiency of an electric vehicle means reducing the energy consumption of the train’s basic motion processes: traction mode, coasting mode, and braking mode. In addition, this definition also includes reduction of energy consumption for own needs and, in case of autonomous vehicles, increase of autonomous travel. The traction mode is characterized by battery discharge current, while regeneration mode generates charge current. These currents depend on many random factors determined by the traction-energy modes of the EV. A hybridization model of bacterial feed-forward optimization with a sparse auto-encoder (HBFOA-SAE) [1] was used to improve energy efficiency for energy systems with inter-network technology (IoT) support. The proposed model mainly uses the SAE model to determine the effective state-of-charge (SOC) values in energy systems.
The authors of [2] developed a neural network model of the EV drive. This model is designed with reinforcements. The model assumes that there is an optimal speed controller for energy saving. It is based on deep reinforcement learning (DRL) and model predictive control (MPC). The proposed algorithm was applied to driving on a road with a slope and improves energy saving by 1% for a single ascent and by 17% for multiple ascents and descents.
Photovoltaic electric vehicles and batteries are being introduced to reduce carbon emissions and energy consumption [3]. The implementation has helped reduce peak electricity demand by 11–29%.
A PHEV design using wind, solar, fuel cells, and supercapacitors (SC), generating electricity through the proton exchange membrane (PEM) and SC for high torque, has been proposed [4]. This design aims to improve energy efficiency by using a motor-wheel and eliminating the transmission.
A portable auxiliary photovoltaic power system based on a folding scissor mechanism includes a photovoltaic power generation module and a power transmission module [5]. Such a system provides portability and allows for storing energy in supercapacitors. The annual amount of energy produced provides the MINIEV with a range of 423.625 km.
The possibility of an electric vehicle tipping over in an emergency can be reduced. The probability of such a case can be reduced due to the accuracy of the forecast. Increasing the accuracy of forecasting and reducing the forecasting time will significantly reduce the likelihood of an emergency. The authors in [6] use just such an approach. Based on a multilayer neural network, they analyze the power model of an electric vehicle rollover. This model takes into account the mass of the battery and the structure of the battery compartment. Based on hyperparameters, rollover indices are classified into five categories. After that, the multilayer neural network simplifies the structure for the time algorithm. This is done just before the rollover process. Using this method, in comparison with classical methods, high accuracy is achieved by taking into account the influence of hyperparameters on the prediction result.
Use of a motor-wheel (Figure 2) allows for the exclusion of transmission and realizing direct engagement of the engine with a wheel [7]. The most expedient use of motor-wheels is in city electric transport such as a tram-bus, a trolley bus, or a subway in view of the fact that speed of communication of these vehicles is low and the majority of losses occur in a reducer.

Figure 2.
Motor-wheel of an electric vehicle.
In [8], as a method for improving energy efficiency, a method for increasing the efficiency of the battery by changing the internal resistance is proposed. This will reduce the discharge voltage of the battery, reduce the discharge time, affect the energy performance, and extend the battery life.
A variant of a bicycle with a medium drive was proposed [9], and the influence of components on the efficiency of the system was considered. The greatest influence was determined to have the chain drive (70–98%), the battery (88–97%), and the charger (85.7% of the total efficiency). Analysis of the working points, including the best characteristics of these devices, will increase the range of the bicycle.
Optimal planning of a real MES using stochastic optimization with forecast updating was considered in [10]. Optimization comes with hydrogen vehicles, offering charging stations with a hydrogen storage system and optimal scheduling based on real MES to increase productivity further. This method will make it possible to balance the power demand and provide operational cost savings.
Regenerative braking allows for saving energy during braking and storing it either in accumulators or returning it to the power supply system. In [11], the use of high and medium intensity braking systems will reduce the frequency of using the main braking system, which will increase the reliability and safety of the vehicle.
The system of monitoring and control of electric power consumption by electric locomotive trains (ECS) at locomotive depots and turnover points of locomotive brigades [12] includes an automated measuring system at ECS and a stationary part consisting of a data reception point from ECS and a unified data processing server (Figure 3). Such a system will improve the reliability of power metering and reduce non-productive power consumption and downtime.
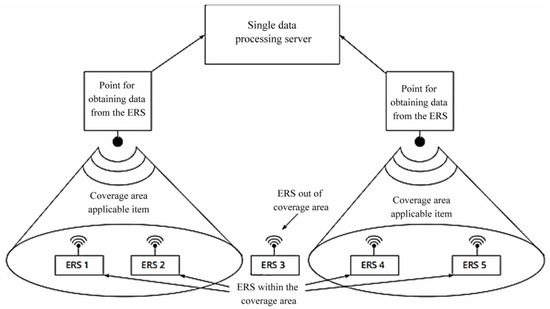
Figure 3.
Simplified concept of the power consumption control system.
In addition, a method to improve the energy efficiency of rail transport systems by reducing idle time and using a hybrid energy storage unit is presented [13]. This will increase the average daily mileage and improve the reliability of auxiliary power supply while “smoothing” the electric load schedule of the train (Figure 4).
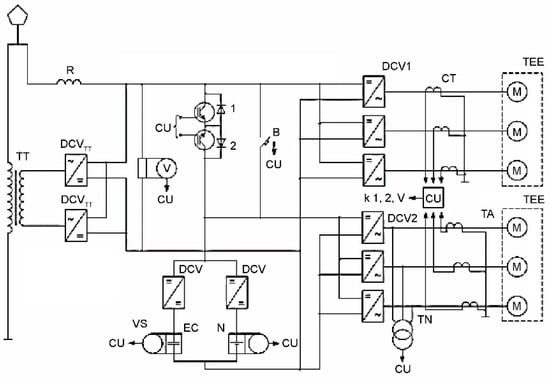
Figure 4.
Schematic diagram of a power plant with hybrid energy storage.
The low-voltage battery charge balance control technology [14] makes it possible to normalize the power-on time of electric consumers. The implementation of such technology is possible both on electric cars and on cars with an internal combustion engine. This will increase the efficiency and service life of the battery.
Extended battery life can also be achieved by optimal design and management of traction and heating systems in hybrid powertrains (IETMS). Using the example of [15], a realistic bus life can be achieved with IETMS without battery replacement while reducing energy consumption by up to 7% as compared to a heuristic heating strategy. If the design of the heating system is co-optimized, the battery life can be extended by another 15% without changing the amount of consumed energy.
The Quantum PSO algorithm [16] will allow for controlling the consumption of electricity and ensuring the economic optimization of the system. The use of the algorithm makes it possible to obtain economic benefits. The economic result is obtained in the micro-grid both on working days and on rest days. Application is possible in various climatic conditions. The authors in [16] proved, in practice, the possibility of obtaining an economic benefit from the introduction of the developed algorithm.
For an urban hybrid electric bus, a model for managing energy consumption by means of dynamic programming was proposed [17]. This model is based on using the route of the previous bus trip. Based on this previous motion cycle, an optimal solution is calculated. For the calculation, the method of dynamic programming is used. The results of the computed solution are saved and used in the next motion cycles. One-step advance deployment is in progress.
The control model presented in [18] is self-optimizing. It is based on the fact that the energy consumption of batteries and fuel cells of electric vehicles is a power matching strategy. Such a strategy takes into account the main factors: battery degradation and energy efficiency. Accounting is done through a deep deterministic policy gradient. This strategy allows expecting a reduction in energy consumption. As a result of lower power consumption, the battery life of the EV propulsion system and the overall life of the FC are extended.
A similar optimization method was used by the authors in [19]. The authors took the movement of an electric vehicle along two routes with different characteristics as initial data. The paper compared the results due to the reference theory of optimization and the results of the developed one. The developed system showed a 5.5% reduction in power consumption compared to that of the reference system.
Energy consumption can be reduced by optimizing the energy storage system and by power-sharing. In [20], the authors developed an algorithm for determining the stack of fuel cells (FC). This algorithm also determines the dimensions of the energy storage system. It takes into account the strategy of power-sharing between two sources. Additionally, in this method there is a division of power. It is based on the unity resistance of the TC stack and Li-Ion battery modules. The new power split technology reduced the FCV fuel consumption by 10%.
Managed charging can also significantly reduce power consumption. In [21], the authors propose to implement a charging monitoring scheme. Two controlled charging algorithms are compared. Both algorithms give approximately the same energy consumption result. At the same time, an uncontrolled algorithm gives an overload of network equipment by 16% during peak hours. Optimization in the proposed algorithms takes into account the restrictions of the energy supply company, electricity tariffs. This reduces the costs of the enterprise for charging cargo EVs.
In [22], the authors presented a quasi-optimal EMS based on dynamic planning (DP). This model is also based on dynamic programming. The model uses a long short-term memory (LSTM) network. The model can be used for electric vehicles with a hybrid energy system. The optimization problem is solved at the expense of minimal costs with the help of DP. Based on the results of the DP, LSTM was trained. The trained LSTM provides a quasi-optimal real-time SC current reference. This strategy reduces the battery degradation time by about 15%.
Tuning and optimization of energy management for electric trucks using fuel cells are considered by the authors [23]. This paper considers a predictive control strategy, taking into account the interaction between energy and thermal effects. The control takes into account the ambient temperature and the battery temperature. This is done in order to avoid temperature peaks by limiting the use of the battery at the right time. Adaptive EMS influences battery temperature peaks by means of minor changes in the power-consumption ratio. The use of such a predictive model for fuel cell trucks provides significant advantages by managing energy to drive the SoC and consume hydrogen. A significant effect on fuel economy is achieved when driving along mountainous and hilly routes.
It is possible to optimize the energy consumption of electric vehicles using fuel cells and batteries due to the initial battery parameters. As initial parameters for optimization in [24], the following are taken: allowable current for the system of fuel cells in the initial states of charge of the battery (SOC); battery status of charge (SOC). Next, the modulation coefficient was found using the swarm optimization method. Using the modulation coefficient, the optimal moment for starting or turning off the fuel cells was determined.
The main goal of creating plug-in hybrid electric vehicles (PHEV) is to reduce fuel consumption and carbon dioxide emissions. PHEVs can operate in three main modes. This is a series, parallel, or hybrid mode with power-sharing. The PHEV has the ability to switch between these modes during its operation. Based on this, it is possible to ensure the lowest possible fuel consumption due to an effective strategy for switching between modes. Often used is the equivalent consumption minimization strategy (ECMS). It is based on predicting driver behavior. The result will depend on the quality of the forecast. In [25], an analysis of various forecasting methods was carried out. The analysis was based on a holistic model of the modern configuration of the PHEV power unit. This model includes a multi-mode transmission, relevant powertrain components and representative transmission components, relevant transmission components, and representative real-world driving data.
In the source [26], the authors proposed approaches to strategies for managing the energy consumption of hybrid electric vehicles, and one of them is based on dynamic programming (DP). Here, it is called the “Advanced Dynamic Programming Approach” (FADP). Advantages in the speed and accuracy of the calculation in it are achieved through the use of DP. The approach is based on the use of equivalent consumption minimization strategy (ECMS). In this approach, the horizon information of the reverse perspective of a finite length was used. Due to this information, adaptation to the latest traffic conditions takes place. All this achieves an optimal power balance between the battery of the parallel HEV and the heat engine. Their characteristics are analyzed in terms of achieved fuel economy and computation time. The following is a comparison with traditional methods of minimax Pont-ryagin principle (PMP) and DP
The use of an electromechanical flywheel [27] makes it possible to ensure the stability of the vehicle and increase the efficiency of recuperation. The increase is provided by the created secondary distribution strategy. This strategy is based on the use of mechanical braking force and regenerative braking force on both axles (front and rear). The works carried out by the authors showed that for lithium batteries, the current change range can be reduced by 43.16%, the average efficiency can be increased by 1.04%, and the recovery factor for braking can be increased by 40.61%. The authors achieved these values in the conditions of the urban traffic cycle in the cities of Japan. These indicators were achieved in comparison with the two-engine all-wheel drive scheme with an electromechanical flywheel. This work also shows that this technology can be applied to cycling. By regulating the power and energy of the electromechanical flywheel, it is possible to reduce battery consumption by 1.82%.
Of the general methods for improving energy efficiency, the most effective are the use of an electromechanical storage device, the use of a quasi-optimal cycle based on dynamic planning, and the use of optimal design and control of traction and heating systems. The electromechanical drive gives an increase in the coefficient of recuperation of braking energy by up to 40.5%. Dynamic scheduling will reduce battery degradation by up to 15% and reduce total cost of ownership by 11%. Design optimization reduces power consumption by up to 7% and increases battery life by 15%.
3.1. Regenerative Braking
Recuperation is the process of returning part of the energy for reuse in the same technological process. Energy regeneration is the “return” of some of the energy expended to the grid, or to an energy storage device if there is one on board the rolling stock. During regenerative braking the engine is in the generator mode and generates energy, which it sends to the network.
By changing the regenerative braking logic, it is possible to achieve maximum regenerative values. The authors in [28] studied this issue in detail. In the urban cycle of operation, such WLTC logic has made it possible to reduce energy consumption by about 30% compared to a conventional car that does not have recuperation. When compared to the conventional logic used in the WLTC cycle, the savings reached 23%. For cycle US06, similar values will already be 24% and 19%.
The authors in reference [29] proposed a parallel strategy to control the recuperative braking in order to fully utilize the performance of the motor. The energy system developed by the authors consists of spercapacitors and batteries. For work, the power is decomposed into low-frequency and high-frequency components. The supercapacitor receives high frequency power. This avoids affecting the battery. Therefore, the SOC of the battery is reduced by 5.15% drop, the recuperation rate is improved during the braking process, and the relative increase increases by 47.9%. In addition, the battery output current was reduced by 39.5%. SOC decreased by 0.69% battery and increased by 12.43% relative gain.
The MPC scheme developed and presented by the authors [30] is intended for use in vehicles with a hybrid architecture. Its purpose is to control the regenerative braking process. One of the principles of the scheme is the introduction of additional restrictions on the operations performed. Restrictions apply to penalty members if a trade-off is needed with the highly efficient IWM operations.
When developing a technique for energy-efficient braking, the authors of [31] proceed from the braking-sliding control of a car. Using the values of the hydraulic braking torque, the limit of the braking torque at the output of the motor is determined. This limit does not lead to the transition to the slip mode but allows you to brake as efficiently as possible and use the recovery process as efficiently as possible. The control algorithm is based on the introduction of the saturation function. This function is needed to solve the buffeting problem in the adaptive slip control method. Brake control combines mechanical braking and regenerative braking. This improves the safety of braking in general. The solution to the problem of increasing energy efficiency in the process of recuperation is possible through the use of a new algorithm. This algorithm solves the boosting problem through the dynamic allinearization method. The non-linear dynamics of the energy recovery process are linearized. For this, the method of dynamic allinearization is used. The peculiarity of this method is that the pseudo-partial derivative parameter (PPD) changes over time (Figure 5). The need for such a transformation and the use of an adaptive control algorithm (AS-MFAC) is due to the fact that under normal conditions, braking saturates the drive during regeneration, and errors accumulate due to various external conditions. An AS-MFAC controller is being developed for this algorithm. The main advantage of the AS-MFAC algorithm is that it uses only data from the regeneration control system.
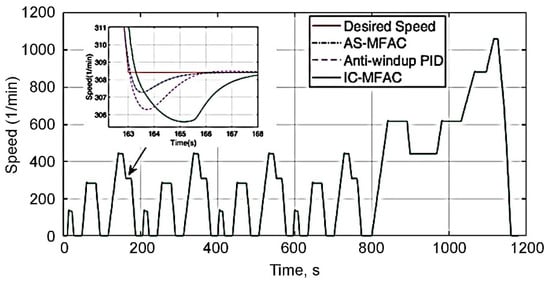
Figure 5.
The curve of car speed changes by three different algorithms.
In the review paper [32], the authors say that the topic of regenerative braking and work in the field of increasing the energy efficiency of this process will become one of the main areas of development for electric vehicles. Recovery is an extremely promising area, and the improvement of recovery technologies is extremely important for the development of electric transport in general. In continuation of [33], the authors of [34] considered BEV technologies from the point of view of application prospects. They say that the battery capacity of electric vehicles is growing with the development of the automotive industry. The low price of BEVs due to low battery costs could lead to BEVs with large battery packs. It is for such solutions that there will probably be more demand. The low operating costs of BEVs and the significant gap between energy consumption and fuel costs will give BEV users a substantial consumer surplus. It is precisely this surplus that can ensure high demand for BEVs with high-capacity batteries.
The authors in the article [35] showed that energy recovery systems can also be used in traditional cars with internal combustion engines. The authors presented technological solutions for the implementation of recuperation systems in vehicle suspension, using the example of an off-road vehicle with a 4-cylinder in-line diesel engine. Studies have shown that using a recuperation system, you can get power in the range of several hundred watts.
By combining dynamic programming and adaptive cubic exponential forecasting, the authors of [36] developed a predictive control method. The authors tested their predictive control method using different brake force distributions. Two schemes for the distribution of braking force were considered—multi-stage and ideal. Comparison with these schemes showed that the efficiency of recuperation in comparison with the ideal scheme increases by 1.55%, in comparison with the multistage one by 6.40% (Figure 6 and Figure 7).
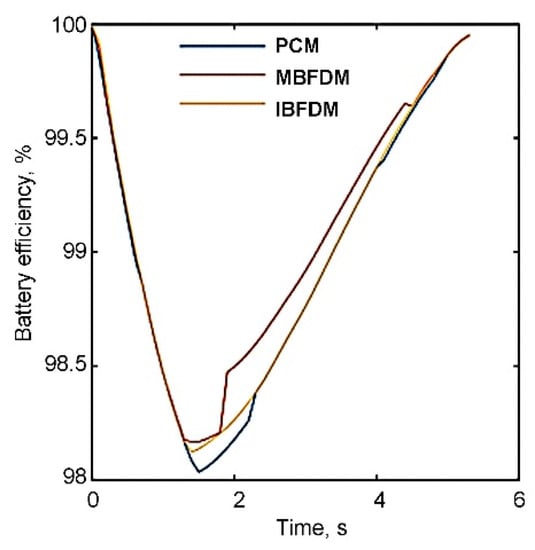
Figure 6.
Change in battery efficiency.
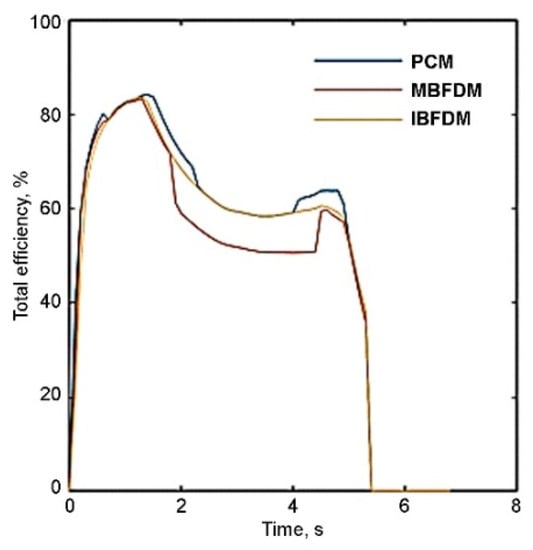
Figure 7.
Change in overall efficiency.
Analysis of the braking strategy for an electric Formula SAE racing car [37] proposes a braking strategy aimed at increasing the recuperation energy by appropriately distributing the braking forces between the rear and front wheels.
When comparing the three braking strategies, the criteria for energy recovery and vehicle stability are taken into account (Figure 8). According to the simulation results, the strategy proposed by the authors will provide an increase in energy recovery, and the problem of blocking both the rear and front wheels will be solved.
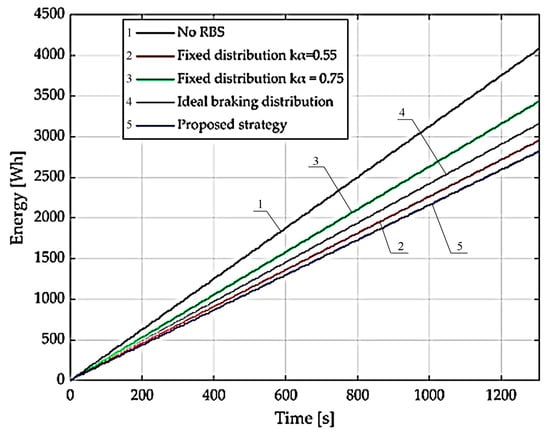
Figure 8.
Comparison of energy consumption.
The multicriteria optimization system proposed in [38], as well as the method for optimizing the parameters of the regenerative braking control strategy (SRCS), consists of several steps:
- RRBCS balancing braking efficiency (BP), regenerative braking loss efficiency (RBLE), and battery capacity loss ratio (BCLR). They were proposed and used in the simulation.
- MOO model. The purpose of its creation is to calculate objective functions using RRBCS simulation results for three different tire grip conditions.
- An individual with optimal CRBP was selected to evaluate the effectiveness of the proposed methodology as the final optimization decision. Decisions on control parameters and optimization results were analyzed.
- RRBCS showed better adaptability to road conditions in terms of decision distribution. Under conditions of medium and low tire grip, the improvement obtained as a result of the optimization was the most significant (Figure 9). This study can provide further guidance on the optimal control strategy and lay the foundation for multi-purpose regenerative control of the basis for multi-purpose regenerative braking energy management of a real vehicle.
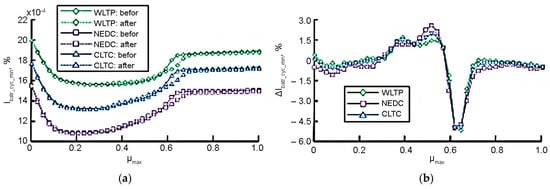 Figure 9. Test results for three driving cycles before optimization after optimization: (a) for good tire grip, (b) for low tire grip.
Figure 9. Test results for three driving cycles before optimization after optimization: (a) for good tire grip, (b) for low tire grip.
In [39], the authors considered a rather rare case. The authors are developing a recuperation system that works in EV driving conditions at low speed. The EV is powered by a permanent magnet synchronous motor. The EV generator is also powered by the same engine. At this point, the L-C resonant circuit gives a signal to increase or decrease the generated voltage. This system is very simple. It has three IGBTs and three capacitors. In the frequency analysis study of the L-C resonant circuit, the resonant frequency is found. The control of the generated voltage is carried out using resonance and due to the previously found resonant frequency (Figure 10). The generated voltage in this algorithm is raised by PI control and lowered by inverse PI control. The use of such a system makes it possible to compensate for the disadvantage of the low capacity of the energy storage of some vehicles.
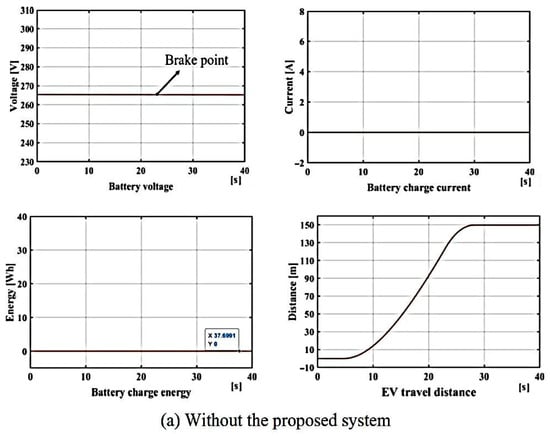
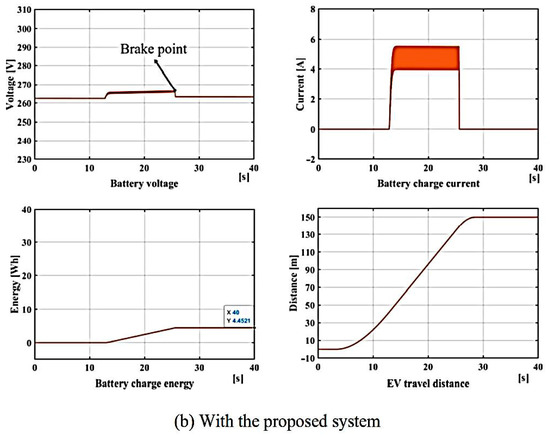
Figure 10.
Results of the experiment on the descent with the battery without the proposed system (a) and with the proposed system (b).
In [40], the authors developed a strategy for distributing the braking force. The ECE control curves and the ideal brake force distribution curves were taken as the basis for developing the strategy. The strategy was tested for the European driving cycle. The results showed that the braking stability required by the requirement is provided by the developed algorithm (Figure 11). If the state of charge is taken at 75% as the starting point, then, according to the simulation results, after moving to the European cycle according to the strategy of this article, the charge decreases by 8.22%. A similar movement according to the standard strategy causes a decrease in charge by 9.12%. Thus, if the estimated battery usage target is 95–5%, then the total range of the EV can be increased by up to 136 km. This shows the viability of the strategy proposed by the authors of [40].
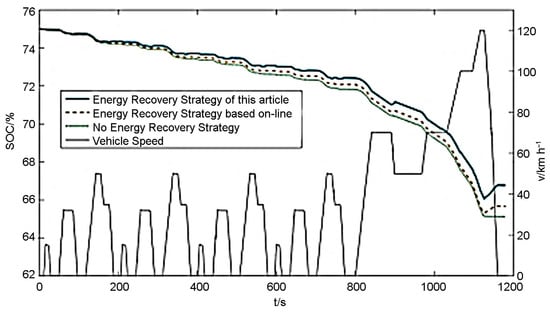
Figure 11.
SOC curve with vehicle speed.
For braking hybrid vehicles, the rate of energy recovery will directly depend on many factors. The authors in [41] studied these factors. Simulation tests and theoretical calculations were carried out in the field of braking energy recuperation. As variable input parameters, various values of the initial deceleration rate and those of the initial pressure of the accumulators were used. The maximum recovery rate that the authors managed to obtain was 83.3% (Table 1). This recovery rate was achieved with the following initial parameters:

Table 1.
Experimental results.
- −
- initial braking speed of 300 rpm
- −
- initial accumulator pressure of 19 MPa
- −
- braking intensity of 0.4.
The authors [42] showed that the torque can be controlled independently. This is true for both acceleration and deceleration for an independent 4-wheel drive EV. Simulation experiments using parallel control were carried out in the motion cycles UDDS, NEDC, and J1015. They also showed that the EV brake energy recovery rate can be improved in the driving area at a low speed. This is possible even when the braking torque is minimal.
The Brake Energy Recovery System (BERS) [43] is important in EV operation. It allows for increasing the mileage per single charge. The effectiveness of BERS depends on many factors. Among these factors are road conditions and ambient temperature. In [43], the influence of these factors on the operation of the BERS EV system was studied. Of course, less recuperation energy is obtained at low ambient temperatures.
In [44], the authors proposed AFSMC to track the desired sliding coefficient. In addition, an RB torque distribution strategy for electric vehicles exposed to RBS was developed. This controller is designed to optimize the braking process. It is based on the fuzzy adaptive control method using the sliding mode. The method allows distributing the braking and pneumatic torque. The use of AFSMC allows for better consideration of the wheel slip. This makes it possible to increase the efficiency of the recovery process. The work compares the operation of the AFSMC and the traditional SMC controller. The comparison takes place when the EV is driven along a dry road. AFSMC increases the regenerative energy from 83.2 to 88.1 kJ.
The efficiency advantages of a split electric motor unit for hybrid vehicles described in [45]. When considering applications in hybrid vehicles, a comparison was made on the basis of the equal power output: the split electric hybrid engine showed an efficiency improvement over the turbocharged reference engine of up to 12.5% when using a turbine with a lower efficiency (i.e., ηT = 0.70) and up to 15.5% when using a turbine with higher efficiency (Figure 12). The calculation takes into account the fact that in hybrid vehicles, the internal combustion engine usually operates under optimal conditions, i.e., with the efficiency being close to the maximum. In this paper, the authors compared a turbocharged engine and a combined engine using maximum efficiency curves. The comparison showed the following results:
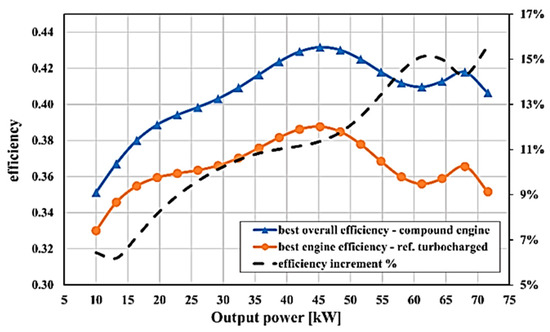
Figure 12.
Comparison of the best composite efficiency curves compared to the reference turbocharged engine.
- for the combined power plant, a growth from 6.1% to 11.2% is possible. The amount of growth is determined by the output power and temperature conditions;
- for an engine with a turbine, a maximum increase of 15.6% is possible with parameters T4/T1 = 4.5; ηT = 0.75.
The most effective ways of regenerative braking are the model of braking without deterioration of rolling stock stability (energy savings of 29.5–30.3%) and application of the braking control strategy (increase in the travel reserve of up to 136.64).
3.2. Energy-Efficient Battery Consumption
Electric vehicles (BEVs), including hybrid vehicles (HEVs), widely use lithium-based high-current batteries, which are called traction batteries. The most commonly used batteries are a high-capacity lithium-ion battery [45]. Batteries for electric vehicles need to have high energy density, high capacity, and relatively light weight, as increased weight affects performance. In addition, low energy density affects the autonomous driving of all-electric vehicles. The best-known ones are lithium-ion and lithium-polymer due to their high intrinsic properties. The efficient use of battery electric vehicles (HEVs) and hybrid electric vehicles (BEVs) is currently being discussed [45,46]. Plug-in hybrid electric vehicles (PHEVs) [46] stand out among hybrid vehicles because they charge their batteries from an external power source, saving fuel and improving vehicle efficiency. The use of two energy sources raises the question of increasing overall efficiency. Two controllers work hierarchically to manage power, while a third controller is responsible for shifting gears. A multi-criteria optimization based on a particle swarm algorithm is proposed to reduce the driver’s influence on the steering angle and minimize the weight of electrical components (electric motor and battery), as well as typical fuel and exhaust consumption. The best compromise compared to conventional cars is improved handling. There is 71.9% less stress on the driver’s steering wheel, 18.44% less fuel consumption, 69.34% less CO, and 20.33% less HC, reducing NOx by 22.11%.
Research on energy saving and emission reduction in vehicles equipped with new energy sources is gaining importance, with the first achievement being the plug-in hybrid electric vehicle (PHEV) [47]. An adaptive energy management strategy, based on intelligent driving cyclical prediction, has been introduced to improve the PHEV fuel efficiency. Simulation results show that the fast model has good predictability, and the proposed predictive adaptive power control system is 9.85% better than the rule-based strategy in terms of gasoline performance. The proposed predictive adaptive power control method is 9.85% more effective than ECMS, which, with no forecasting, is more than 5.30% high.
To improve the SOC EV [48], a hybrid electro-hydraulic electric vehicle (MSEH-HEV) was proposed. MSEH-HEV uses planetary gears as the main transmission component for power conversion. This paper introduces six modes of vehicle operation and develops a rule-based control strategy for controlling power distribution and mode switching. In this study, AMESim and Simulink to simulate MSEH-HEV were used together and the superiority of MSEH-HEV over AMESim was confirmed. Simulation results show a 15% reduction in battery consumption and a significant reduction in the peak engine torque during the Economic Commission for Europe (EEC) and Commuter Drive (EUDC) cycles for MSEH-HEV (Figure 13).
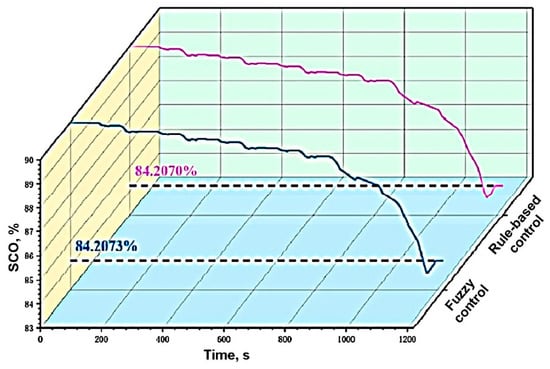
Figure 13.
Fuzzy optimization analysis: battery SOC curve.
Hybrid Electric Vehicles (HEVs) in the transportation sector are pushing the industry towards “green” technologies for environmental sustainability [49]. In this article, Fuzzy Logic EMS was used to explore the fuel economy potential of power-sharing hybrid electric vehicles. Simulation results of a typical driving cycle show that the proposed controller can outperform regulated EMS and reduce fuel consumption by up to 65.4%, thereby reducing emissions.
Congestion is a constant problem in many urban centers (e.g., London) around the world, resulting in excessive delays, noise and air pollution, driver annoyance, and increased energy consumption [50]. As a result, the carbon footprint of traditional transport systems can be high. In this study, empirical data collected from several locations in East London were used to create a simulation model using the graphical user interface (GUI) of the PTV simulation software VISSIM to demonstrate the intended driving and following behavior. The model showed that the introduction of ConFAV can reduce delay by up to 100% and significantly reduce greenhouse gas emissions.
The continuous change of gear ratios in continuously variable transmissions (CVT) often results in a rapid change in the amount of oil in and out of the hydraulic system, resulting in large energy losses and reduced fuel efficiency of the vehicle [51]. With this issue in mind, this article investigates a plug-in hybrid electric vehicle (PHEV) with a continuously variable transmission, and a genetic algorithm (DVROMGA) drive ratio optimization method for a discrete variable transmission variator. In order to get the transmission efficiency of the system in different modes, it is recommended to research the 5 PHEV driving modes first. Ultimately, the proposed method improved the fuel efficiency of the PHEV by 2.2%. The results show that the proposed method reduces energy losses in the hydraulic system, ensures long-term operation of the engine in the area of high efficiency, increases the fuel efficiency of the vehicle, and maximizes the potential for energy saving of the vehicle.
The development of electric vehicles in almost all countries of the world is currently undergoing high intensity. In [52], the author describes the service of the laboratory of the Sapienza University of Rome delivering disabled people by electric cars. The service can serve about 12 sick people per hour, while the total travel time is about 40 min (not counting the time of boarding and disembarking disabled people). The energy consumption is about 0.79 kWh per trip. According to the business plan, the costs are approximately 78,000 euros, and the annual operating costs are about 505 euros per electric vehicle.
The author [53] proposed a probabilistic way to control the energy-efficient consumption of electricity in hybrid electric vehicles (PHEV). The paper proposed an energy management controller that provides the best traction performance based on the available collected stochastic motion database. The designed controller achieved an average improvement of 8.60% and 16.09% on the two selected routes and a reduction of 10.75% and 12.85% of the 75th percentile compared to the commercial method. CVaR costs and EVAR limits are introduced to quantify the risk of energy consumption. These measurements lead to the formulation of the MIECP problem for determining vehicle speed thresholds in the driving mode (Figure 14). The proposed method was evaluated using two transport routes: a commuter route (Route A) and an experimental route (Route B).
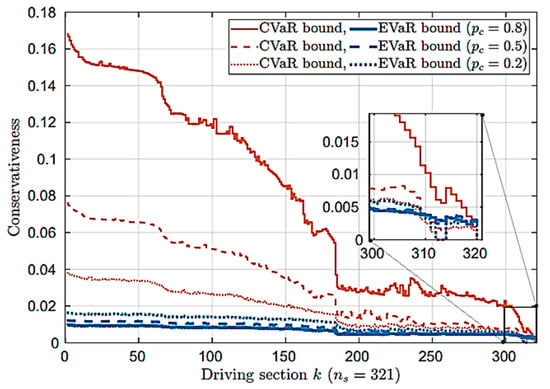
Figure 14.
Values of the conservatively index of the CVaR and EVaR boundary determined in [21] for pc = 0.2, 0.5, 0.8.
The authors of [53,54] attempted to use risk-based energy management for PHEVs in order to reduce fuel consumption. The fuel reduction is based on a model using historical driving data. The developed controller achieved an improvement of 8.60% and 16.09% on two selected routes to determine vehicle speed thresholds in the driving mode (Figure 14). The proposed method was evaluated based on two transport routes: a commuter route (Route A) and an experimental route (Route B). The calculation can narrow the conditions applicable to the proposed method, so it is important to collect more statistics about the taken routes.
The authors of [55] present a data-driven, model-based approach to predictive control for PHEV energy management. This approach predicts drivers’ behavior in the future directly from recorded examples of drivers who have previously traveled the route. Using the scenario optimization results to determine confidence bounds that one-step-ahead optimization is possible for a specified probability, proposing an efficient ADMM algorithm to solve the corresponding MPC scenario optimization problem. The presented results are important for the future development and research of optimal power distribution control for PHEVs.
In [56], the authors consider a real-world microgrid self-consumption strategy at the EUREF campus in Berlin, Germany. They implemented and tested a rule-based algorithm for managing sustainable power supply of electric vehicle charging stations. The measurements were recorded in high resolution for three years from 2017 to 2019. The performance of microgrids is measured against three key metrics: self-consumption, autonomy, and emissions levels. The results show that self-consumption and autonomy are sensitive to the nominal energy capacity of the battery system. In addition, emissions reductions from introducing batteries to charge electric vehicles are up to 37% under ideal operating conditions (Figure 15). This is one of the applications of electric vehicles in cities.
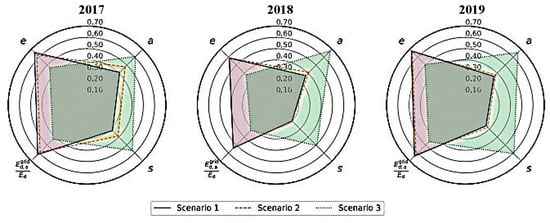
Figure 15.
Comparison of established key performance parameters (s—self-consumption, a—autarky, e—emissions).
As is known, compact passenger cars can reduce aerodynamic drag [57,58], which leads to significant savings in energy consumption and emissions. This paper discusses the DrivAer models in detail. This popular model is presented in three different geometric options. The analysis of the work shows that the geometry of the car has a significant impact on the obtained results. These changes affect vehicle weight, additional loads, drag coefficient, and frontal area, all of which affect vehicle performance. Ref. [59] uses the FASTSim transmission simulation model to quantify the impact of autonomy-related design changes on vehicle fuel consumption. Level 0, 2, and 5 autonomous vehicles are modeled for two battery cars (Chevrolet Volt 2017 and Nissan Leaf 2017) and a petrol car (Toyota Corolla 2017). In addition, Tier 5 vehicles are divided into pessimistic and optimistic scenarios and include various forms of electronics integration. The results show a 4–8% decrease in energy efficiency in the optimistic L5 scenario and an increase in the energy efficiency of 10–15% in the pessimistic L5 scenario.
In line with the goal of reducing and neutralizing carbon emissions, improving the efficiency of renewable energy and electricity is an urgent task for China. Based on the Frank-Copula-Gluck-CVaR model, a method for optimizing the planning of electric vehicles (EV) [60] in combination with wind and photovoltaic energy was proposed. A yield model based on copula theory describes the correlation between wind power and solar power. The exponential Frank-Copula-GlueCVaR model is presented in a new way. An optimal planning model has been proposed to reduce the cost of group charging of electric vehicles. An application of the Roth-Serv algorithm was proposed, an EV group was considered as a group with multiple intelligences, and a Pareto-optimal EV group strategy was uncovered through continuous learning. As a result of practical research, it is believed that the electric vehicle group can effectively absorb more renewable energy, reduce the consumption costs of the electric vehicle group, and restrain the load fluctuation of the entire electric vehicle group, which has practical and theoretical significance. The use of microgrids (MG) is a new and promising area for the development of energy saving. The work [61] presents an overview of the development of MG technology over the past decades, taking into account distributed energy generation (REE), energy storage systems (ES), electric vehicles, and loads. The main MG architecture, mode of operation, size and integration of energy management systems (EMS), and electric vehicles are considered. Particular attention is paid to the integration of electric vehicles in microgrids. The potential use of a fleet of electric vehicles as distributed energy storage systems has been extensively studied in the literature and is detailed in this article. This allows electric vehicles to be charged from renewable energy during off-peak hours, greatly reducing the environmental impact of this mode of transport. The energy available in electric vehicle batteries can be used to support the grid during peak hours and prevent congestion problems and their consequences.
The ubiquity of electric vehicles affects the reduction of CO2 emissions and is a top priority. An accurate and timely assessment of total electricity demand determines the interaction between consumers and the grid, taking into account traffic flow, energy demand, and available charging infrastructure within the city. Existing methods for predicting the energy consumption of electric vehicles do not take into account the energy consumption of all electric vehicles. This prompted the development of a new big data scoring model to calculate the total energy consumption of electric vehicles over arbitrary time intervals. The main contribution of [62] is the study of aggregate demand models for coordinating generation schedules and preventing power outages. The proposed model successfully processed 100 million records of real taxi routes and weather datasets, demonstrating that energy consumption is highly correlated with weekday traffic (Figure 16). In addition, the model defines Thursday and Friday as days of peak power generation, with weekends and holidays being the least part.
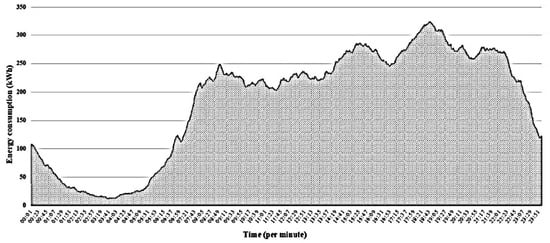
Figure 16.
Energy consumption of a random day (March 2018) for each minute.
Hybrid electric vehicles are currently one of the leading solutions to reduce greenhouse gas emissions in the automotive sector [63].
This article describes how to use a control-oriented vehicle model and transmission to analyze the performance of a V12 twin-engine hybrid vehicle based on LiC capacitors. An LiC-based twin-engine hybrid vehicle is used, as is used for Lamborghini vehicles. Proven models are applied to develop management strategies, especially rule-based and fair strategies, to save fuel and reduce CO2 emissions. The results show that fuel economy improved when the hybrid management strategy was activated. RBS can reduce fuel consumption by up to 2.3%. In particular, P2 can be used instead of P3.
With the increase in the number of electric buses (e-bus), the problem of planning trips on e-buses has become an important part of transport planning [64]. Since the battery capacity of electric buses is limited, the task of electric bus scheduling aims to assign vehicles to scheduled bus routes based on their charging needs. In this article, a robust optimization approach was used to solve the e-bus scheduling problem when the travel time is unknown. The EVSP multipoint model is formed under conditions of travel time uncertainty and partial recharge. The Branch and Price (BP) algorithm was designed to create large scale instance quality assurance solutions. The BP algorithm develops efficient labeling algorithms for solving robust subproblems of finding the shortest path with limited resources. Comprehensive numerical experiments are being carried out on a bus route in Shenzhen to demonstrate the effectiveness of the proposed methodology. Schedule reliability was evaluated using Monte Carlo simulations. This result shows that trip start delays and battery drain caused by travel time uncertainty can be effectively reduced by increasing operating costs.
The authors of [65] presented a scheme for optimizing power distribution between batteries and supercapacitors in electric vehicle energy storage systems. The Variable Duration Multiplier Method (ADMM) determines the computational and memory requirements in proportion to the length of the prediction range (which may be reduced by parallelism). The optimal controller is mapped to a low pass filter. It has been shown to significantly reduce battery wear (based on 71.4% battery peak power reduction, 21.0% battery peak power reduction, RMS power, 13.7% battery bandwidth reduction).
The hybrid electric buses (SHEB) currently on the market use ultracapacitors (UCs) to increase battery life, reduce vehicle weight, and reduce costs [66]. However, previous studies have not clearly defined work hours and UC workload to improve SHEB efficiency. New factors are proposed to improve efficiency. The list of such factors consists of three items: required engine power threshold (TRPM), y-intercept for a power split ratio (YPSR), and power split ratio slope (SPSR).
Battery life is determined by the TRPM power threshold and an effective load ratio between UC and battery using YPSR and SPSR. The driving conditions were determined by different cycles of movement. They took motion cycles from places like Orange County, Brunswick, Manhattan (Figure 17). The proposed coefficients (and their settings) provide an increase in energy efficiency and a significant reduction in fuel consumption.
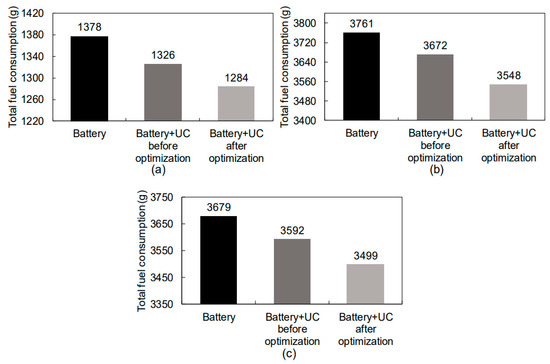
Figure 17.
Comparison of total fuel consumption: (a) Manhattan cycle; (b) Brunswick cycle; (c) Orange County cycle.
For energy storage devices, the most effective methods are optimization of power distribution between supercapacitors and batteries (5% reduction in energy consumption), automation of transport processes (10–15% improvement in energy efficiency), and the use of wizards.
3.3. Application of Energy-Saving Technologies in the Electric Transport Complex
Energy-saving technologies in the electric transport complex imply measures to reduce energy consumption, but these measures are not always directly related to the on-board systems of the vehicle.
The main advantages of an electric car over that with an internal combustion engine are the lower cost of fuel (energy) and greater efficiency [67]. At the same time, the electric car also has disadvantages associated with a significant limitation on the distance that it can travel using a single charge. The authors in this work note that the acceleration and deceleration cycles significantly affect the duration of the journey per one charge. The purpose of their work is to increase the efficiency of electric vehicle operation systems (braking system, engine, and regenerative braking system). An increase in energy efficiency is offered by a brushless DC motor (BLDC). To refine it, an LC filter is used. The purpose of these conversions is to increase current and reduce ripples and jumps in torque values. Having carried out practical experiments, the authors showed that the use of a BLDC motor using an LC filter makes it possible to obtain a torque of 3 N m at a motor shaft speed of 2200 rpm.
The authors of [68] also speak about the need to improve the efficiency of the EV electric drive system. In their work, they say that the limit of improvement of the energy system has not yet been reached and new technical solutions are still relevant and give significant results. Their proposed technology aims to improve EV performance by optimizing the transmission (differential). By changing the final gear ratio of the differential based on the data of a standardized driving cycle, an energy saving effect is achieved. WLTC-2, WLTC-3, and NEDC were used as standard motion test cycles. The conducted studies have shown the relevance of using a small gear ratio. Using a short gear ratio improves performance. This statement works in the case of there being a big torque (Figure 18). Depending on the used duty cycle, energy savings of 3% to 8% were recorded. In real-world driving scenarios, autonomy and battery life are expected to increase.
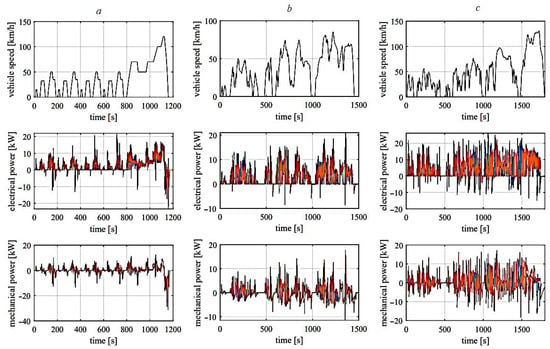
Figure 18.
Mechanical, electrical, and power (drive cycles NEDC (a), WLTC-2 (b), and WLTC-3 (c)). Final gear ratios are 4.3 (blue) and 3.54 (orange).
The problem of energy saving when driving in an urban environment is considered in [69]. In this work, an analysis of energy storage devices used by urban electric transport was carried out. Based on the analysis, the authors came to the conclusion that the use of storage devices can significantly improve energy efficiency. One of the most promising storage devices for use in the urban transport system is a supercapacitor.
The authors in [70] considered the issue of EV security. The problem of safety is considered from the point of view of the charging process and the operation of the charging equipment. The authors analyzed the statistics of charging failure cases. They considered the causes of failures in the charging equipment and investigated the malfunctions of the EV itself. Analyzing cases of equipment failure and its operation, the authors determined the safety index of a car, suggesting measures to solve charging problems. A systematic approach and a comprehensive solution allow for controlling the charging process (Figure 19). There are some countermeasures that are useful for evaluating the safety index of an electric car, identifying non-faults, and creating a complete system of charging safety standards.
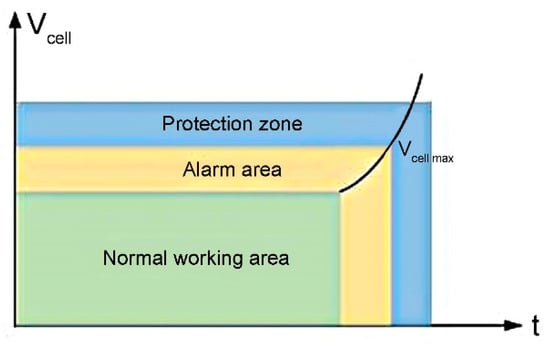
Figure 19.
Battery overvoltage protection model.
The strategic direction of the development of the transport sector is to reduce the burden on the environment and reduce harmful emissions [71]. In the article of the authors [71], the use of hydrogen is presented as one of the promising directions for the development of electric vehicles. The advantage of hydrogen is that it is non-toxic. The product of hydrogen combustion is water. At the same time, the calorific value of hydrogen per unit mass is the highest in comparison with other types of fuel. In [71], the authors, using the example of urban trolleybus traffic, show the benefits of using hydrogen technologies in comparison with electric transport and in combination with an electric drive (Figure 20 and Figure 21).
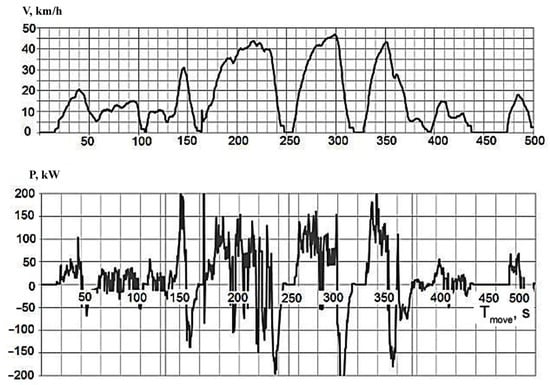
Figure 20.
Dependence of trolleybus route speed and traction drive power on time.
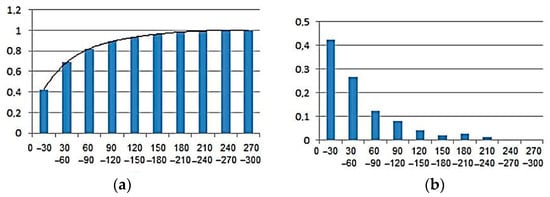
Figure 21.
Statistical treatment of maximum braking power: (a) integral distribution, (b) probability density function.
The problem of limited mileage of an electric vehicle due to the limited capacity of batteries is considered by the authors in [72]. The authors consider this as a problem of low energy storage density in batteries. As a solution to this problem, effective energy management is proposed through the use of forecasting technologies. A network with long-term memory and short-term memory (LSTM) was used. In the process of forecasting, the neural network also takes into account data on the nature of driving, and data on the state of the car. It integrates this with traffic information and plans the road with the best balance of energy consumption and distance. Experiments have shown that the selection of the path according to the proposed algorithm makes it possible to reduce energy consumption by up to 9.9% in comparison with the shortest possible path. Travel time is reduced even more significantly, up to 40.2%. If compared with the shortest possible path based on time, then the results will be worse: 1.5% less energy saving, 18.6% more time (Figure 22).
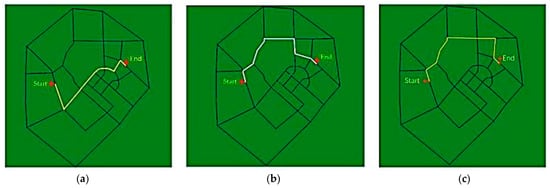
Figure 22.
Optimal path obtained with different objectives: (a) optimal path based on shortest distance; (b) optimal path based on energy savings; (c) optimization path based on time savings.
In recent years, all-electric vehicles (EVs) have made up an increasing share of city buses. Due to their relatively low range, many technologies have been used to increase the range, such as improved energy management strategies and improved battery and engine performance. The authors of [73] set the task of improving the driving strategy in terms of energy saving. To implement the strategy, the authors tried to solve two problems. The first is to calculate the speed interval in which there will be a maximum reduction in energy consumption. The second is to find energy-saving acceleration modes. Using the AVL CRUISE program, the authors created an energy consumption equation and a bus model. For analysis, experimental data from city buses were also obtained. Using the equation and the bus model with the help of real data, the interval of effective speeds was calculated. The minimum energy consumption for an electric bus turned out to be 30–40 km/h. Additionally, a curve of dependence of speed on time was constructed, the parameter β. The constructed graph showed that the lower β, the less energy consumption per kilometer of distance is obtained. To verify the obtained results, test trips taking into account these data were conducted. The result showed that the energy consumption for short acceleration sections decreased by 12.32% to 18.7%. If the entire trip and the average value are considered, then the decrease is 2.47% (Figure 23).
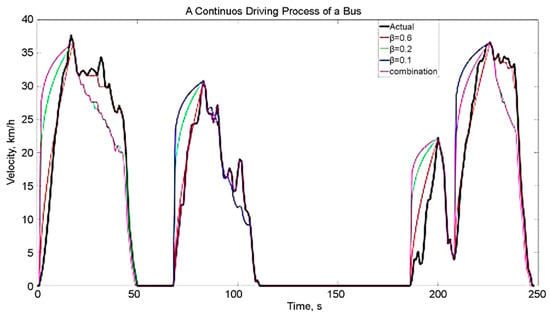
Figure 23.
Dependence of speed on time before and after optimization.
The transmission significantly affects the range and dynamic performance. It also affects energy savings for the EV. The authors of [74] developed an automatic transmission with dry friction. The developed transmission is based on a two-speed seamless system. The composition of the system is as follows: dry friction clutch; brake band; gear.
A two-stage gear train of the epicyclic type was used without external ring gears. Optimization of the gear ratio for the developed system made it possible to improve the dynamic characteristics. Along with the improvement of dynamic characteristics, power consumption has also been improved. The performed calculations show that the new transmission provides higher dynamic performance while reducing energy consumption. The calculation results were verified and confirmed by real experiments. The experiments show the following data for the designed transmission: gearshift time for SDAT is ~0.5 s, energy consumption is ~0.52 kWh/km (for NEDC cycle).
The energy storage system (ESS) becomes most efficient when combined with a battery and a supercapacitor (SCap). This combination gives an increase in battery performance. This occurs by reducing the load and is most pronounced in conditions of peak loads. The developed energy management (EM) model [75] is interesting for the use of solar energy (SPB) for the electric vehicle (EV) operation. The developed model itself consists of: battery, solar panels (PV), DC-DC converters, SCap, and appropriate management model.
The simulation experiment was carried out with a static load. For modeling, the MATLAB/Simulation environment was used. At the same time, the power was constant. Three different conditions were adopted for the experiment:
- Battery powers the load and SCap
- The solar battery powers two sources and a load
- The battery supplies power when the PV and SCap are not working (not supplying power)
Based on the results of the work, it was found that in the first case, the load receives energy from the SCap and the battery. The battery is on all the time, but the SCap is only on during start-up (it turns off afterwards). In the second case, PV supplies full power, SCap, and the battery work during start-up. The third case shows the efficiency of power distribution at the request of consumers. There are two options here: the battery and PV power, the load and charge of the SCap; PV has reduced the power output by more than 50% and both battery and SCap come into play.
A new scalable Peer-to-Peer Car Charging (P2C2) approach was proposed by the authors of [76] for BEV charging. The work of the authors shows that this approach allows BEVs to share energy among themselves. This eliminates the need for complex charging infrastructure. Coordination is carried out using a cloud-type management system. Mobile charging stations (MoCS) are also offered for charging. MoCS have high-capacity batteries. The proposed scheme differs from existing V2V solutions. In this P2C2 circuit, the charge exchange occurs during movement. This makes it possible to minimize downtime and charging time. Reducing the charge time on the road is provided through the use of different batteries. Small batteries are used to transfer charge, and large ones are used to store energy for a long time. The simulation performed showed the possibility of a significant increase in BEV mobility when using the proposed charging technology.
Among energy-saving technologies, transmission optimization (energy savings of 3–8%) and an energy management model based on an electric car on a solar battery (power generation of 450–900 W) are more effective.
3.4. Improving the Efficiency of Energy Storage Devices
In this section, data on researching the subject of increasing the specific capacity of batteries, increasing the lifespan, and other methods were collected.
The work on creating an electric vehicle battery pack often faces a large number of restrictions and challenges. These requirements are imposed on the designer in terms of acceleration, charging speed, weight of the electric vehicle, its volume, service life, range, etc. However, one of the most important characteristics is the range on a single charge. This parameter is decisive for understanding the size of the battery pack of an electric vehicle. The growth of the battery pack leads to an increase in its volume and an increase in the mass of the electric vehicle. Reducing the battery pack leads to a decrease in mileage per charge. The designer has to look for a compromise between these parameters or use new technologies. One of the ways of such compromise can be the use of a hybridized battery pack. Such a block will consist of high power (HP) elements and high energy (HE) elements (Figure 24). Such hybridization combines energy and power, giving the opportunity to satisfy a fairly wide range of requirements of users of electric vehicles. The work [77] is devoted to the use of a combination of different batteries for a typical electric vehicle. As an object of study, the authors took Mitsubishi MiEV. Cells HE and HP were recruited from batteries of various types. Lithium-ion batteries with titanate lithium oxide (LTO) and lithium-ion batteries with nickel manganese cobalt oxide (NMC) were used. The authors solved the problem of finding the best hybridization topology for a voltage profile for an interface based on a DC circuit. The solution of a multi-objective optimization problem was found by applying a genetic algorithm. The authors checked their results on the basis of two common driving cycles: the European NEDC and the worldwide WLTP. The results confirm the effectiveness of the proposed solution for the use of batteries of various types. The service life of batteries is growing, and the charging power of an electric vehicle is increasing in comparison with that of an electric vehicle containing batteries of the same type. For the tested Mitsubishi MiEV under certain conditions, the increase in achievable mileage is 40,000 km, in the event the expiration date of the battery that is accepted when its capacity drops to 70%. Another significant plus of the combined unit is the high charging speed. It can be charged up to 70 in about 6 min.
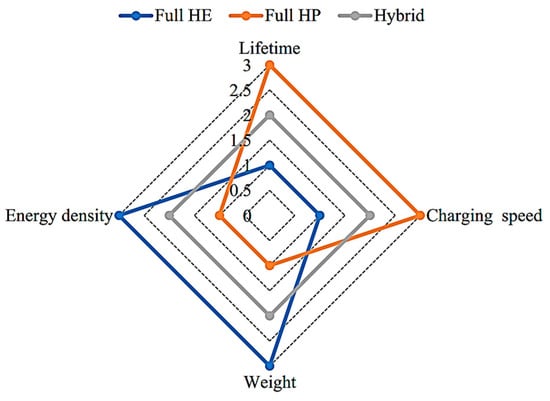
Figure 24.
Radar diagram for ranking design options based on service life, charging rate, weight, and energy density.
If the power device is electromechanical, then there is a fairly large scope for technical and optimization solutions. Directions for improvement can be implemented in two ways. The first is the improvement of the design. The second is the optimization of energy management modes and power supply of engines. In [78], the authors took the first and second paths at once. To solve optimization problems, a planetary mechanism was created with an electromechanical flywheel as a transmission link from the engine. In this work, various schemes of the topological structure were analyzed. Structural schemes were analyzed that allow the connected motor to control the speed. The introduction of the developed mechanism and the use of the calculated operating modes gives a very tangible result in comparison with a conventional electric vehicle (with a conventional drive mechanism). The acceleration time is reduced by 18.25%. There is a 22.32% increase in average acceleration from 0 km/h to 100 km/h. The design of the drive motor is reduced, increasing transmission efficiency improves the overall dynamic characteristics of the car.
The tests carried out for various driving cycles have shown an increase in the operating efficiency of the system and an increase in the efficiency of the lithium battery.
- J1015: overall efficiency increase of 8.2%, battery efficiency increase of 6.7%;
- NEDC: 5.6% increase in overall efficiency, 4.2% increase in battery efficiency;
- HWFET: overall efficiency increase of 4.3%, battery efficiency increase of 4.1%;
Extended Range Electric Vehicles (EREVs) are another solution to the problem described in the previous study. The increase in battery life is not only useful from an operational point of view, but also has a significant reduction in anthropogenic load. It does this by reducing the frequency of battery disposal. The work [79] is devoted to the implementation of a hybrid energy storage system (HESS) in EREV. The task of reducing the amount of energy required or reducing fuel consumption is solved by two strategies. The first uses the principle of minimizing equivalent fuel consumption (ECMS). The second strategy uses the hierarchical principle. Both strategies are built into the Depletion/Charge Maintenance (CD/CS) control unit. To test the developed strategies, a simulation experiment was performed. For this purpose, these strategies were introduced into the AVL Cruise software product. Simulations have shown that the introduction of HESS can reduce fuel consumption and increase battery life. The maximum reduction in fuel consumption when using HESS is up to 11.3%.
It is widely recognized that the achievement of carbon neutrality is largely based on the use of electric vehicles. Despite significant progress in the development of electric vehicles, the range indicators for vehicles with internal combustion engines are still difficult to achieve with electric vehicles. The authors of [80] devoted their work to an attempt to solve this problem. The solution to the problem is proposed to be achieved through energy recovery and modern technologies for its storage. The authors reviewed modern technologies and, based on the review, concluded that integrated approaches have the greatest prospects.
Another work [81] is devoted to minimizing operating costs. Auto-rami offers a training system. The learning system, based on operating data, places limits on the range of the battery charge. Additionally, restrictions are introduced by the same system on the range of the state of charge of the battery. Learning the control program in a driving cycles is the basis of the solution proposed in this paper (Figure 25). Experimental results show that a trained system for driving habits and terrain makes it possible to reduce operating costs by 48% by reducing energy consumption.
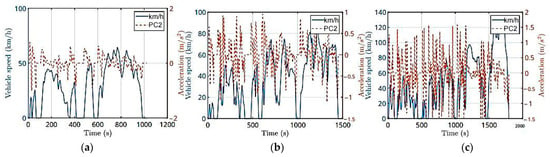
Figure 25.
WLTP ride cycles for verification. (a) Class 1: Specific power in Watt/Mass without load in kg ≤ 22. (b) Class 2: Specific power in Watt/Mass without load in kg > 22 but ≤ 34. (c) Class 3: Specific power in Watt/Mass without load in kg > 34.
It is worth noting that the work on improving electric vehicles is useful for many industries. Lithium-ion batteries, which are being actively developed to improve EV performance, are widely used. Therefore, work [82] is interesting not only from the point of view of electric vehicles, but also for a wide range of technical applications. The authors are developing the concept of a “smart battery”. This battery includes power electronics and artificial intelligence (AI) control units. A bypass device is attached to each cell of such a battery. The paper also says that in order to prevent rapid degradation, pulsed current can be used. Pulsed current can extend battery life by 80%. This is confirmed by laboratory studies. During these studies, Smart Battery technology is used. It uses a battery digital twin to train the control system. Based on this twin, performance is optimized, and battery failures are also predicted. Smart Battery is still a new concept, and it is in the process of being studied, developed, and proven to work.
One of the technologies for increasing range is wireless charging technology. This technology has side effects associated with additional surge current. This current will shorten battery life. The authors of [83] proposed a hybrid energy storage system (HESS) to solve this problem. Similar systems have already been used by the authors in this review for passenger EVs.
The work [84] presents an analysis of various batteries, their properties and characteristics, and shows the dependencies of the charge/discharge of batteries. Particular attention is paid to finding the optimal battery life under conditions of forced operation (frequent starts and stops of an electric vehicle, sudden accelerations). The process of changing the technical resource of a lithium-ion battery depending on the number of charge and discharge of the battery is considered. The initial causes of degradation, charge, and discharge currents in heavy operating modes of lithium-ion batteries were investigated.
In [85], the authors presented an overview of modern technologies and solutions for the implementation of electric vehicle power electronics.
A significant part of the work [85] is devoted to the systematization of data on the types and operation of charging stations for electric vehicles (including the architecture of battery-based EVs charging stations). In addition, issues of power electronics architectures are considered in detail. Data on the architecture of EVs traction drives are given.
The most effective methods to improve the efficiency of energy storage units are the application of the PHEV energy management policy (48% reduction in operating costs) and optimization of parameters and the flywheel energy management strategy (4.1–6.7% increase in efficiency).
3.5. Energy-Efficient Electric Vehicle Traction Drive
Life cycle analysis (LCA) is the information and its study for the subsequent construction of a model of solutions that are favorable to the external environment, during the design of a device or system. Life cycle interpretation is regulated by ISO 14043. The main task of LCA life cycle interpretation is to develop recommendations for minimizing adverse environmental impacts. Improving the environmental performance of a product by taking into account LCA recommendations can ultimately lead to many environmental impacts (e.g., reduced material and energy consumption of the product) and economic benefits (e.g., savings in raw material procurement, consumption (increased consumer demand), increasing the environmental awareness of consumers, improving the economic image of the company, etc.).
An electric vehicle LCA life cycle assessment and production of electrolytic hydrogen is power-dependent. Therefore, LCA tests typically require power data. In this regard, there are four problems:
- (1)
- Databases of Major Life Cycle Impacts (LCI) contain some uncertainties and inaccuracies.
- (2)
- The composition of electricity in each country changes rapidly every year.
- (3)
- The composition of energy varies greatly with the seasons.
- (4)
- How to consider nuclear power in benchmarking.
The analysis shows that [86] the difference in greenhouse gas (GHG) emissions in national production structures in the main databases is very large and reaches 30%, (c) renewable synchronization rules are needed to operate during periods of overproduction, (d) power benchmarks are highly dependent on the choice of system midpoint and/or endpoint, (e) power benchmarks are highly dependent on the choice of system midpoint and/or endpoint, (e) new LCI databases based on measured emission data are urgently needed and are constantly updated and kept up to date. There is a need for constantly updated access to databases, and transparent and publicly available data on emissions.
In [87], a braking algorithm was developed and studied, which allows for maximizing the return of energy during braking and at the same time ensuring the necessary speed and safety of braking. As an object of study, the authors chose an electric vehicle purely on electric traction with all-wheel drive.
Efficient management of battery power consumption in electric vehicles (EVs) is important for saving energy and increasing the range of electric vehicles on a single battery charge [88]. This makes energy consumption an important factor when choosing an engine speed controller for an EV traction system. This article experimentally investigates the battery power consumption and speed tracking performance of fuzzy logic controllers (FLC) and PI controllers when used in field-oriented indirect propulsion systems for electric vehicles. In the lab, a prototype EV traction system was set up to evaluate and performance in terms of battery power consumption, and speed tracking was compared. An experimental study of a prototype electric vehicle traction system shows that the FLC is more energy-efficient than its PI speed controller, with a slightly higher speed tracking error. In addition, FLCs have lower transient current surges compared to PI controllers, resulting in less stress on the battery and less battery wear (SOH).
The authors in [89] present a theory and methodology for calculating on its basis, by determining the reactive power generated by non-linear consumers. Such consumers include charging stations for electric vehicles when electric vehicles are connected to them for charging with various types of batteries. The paper gives an assessment and justification of two components of distortion in the supply network: reactive power and distortion power, which are often not taken into account by power plant designers.
A large amount of research has been devoted to studying the classic version of a front-wheel drive electric car. In [90], the study of energy saving technology for such cars is based on the analysis of the collected data on the operation of the car in urban and suburban conditions. The authors built a C4.5 decision tree algorithm to train the operational state recognition model. Four forecasting models were created and trained. A neural network with long-term memory was used for training. The optimization of the structural parameters of these models was carried out through the use of the particle swarm algorithm. Forecasting using these models determines the following control parameters:
- required speed
- braking force
- required torque
For four models, four strategies were created to distribute the braking force. These strategies differ in the balance of distribution between the rear and front wheels of braking force. Seagull’s algorithm was used to optimize front wheel brake and torque control. It was calculated that when using the developed strategies in the urban cycle, the return of energy per 100 km is about 2.6 kWh. This gives a recovery factor of approximately 19%. As a result, the range of electric vehicles is increasing.
The use of electric motors to replace internal combustion engines gives a significant number of positive aspects. Among them is the possibility of improving habitability due to the smaller volume of the transport units themselves. The authors of [91] used an all-electric all-wheel drive electric vehicle. A feature of the work of the authors is an attempt to realize the control of each wheel separately, independently. This was done in order to improve the dynamic characteristics of the vehicle. The control algorithm was developed using the Matlab-Simulink software package. In the same package, together with the VICarRealTime simulation environment, a dynamic model of the electric vehicle under study was implemented. The simulation showed that when using the developed algorithms to control the wheels, the controllability of the electric vehicle is improved and energy consumption is reduced. The dynamics of movement and the average speed of movement practically do not change.
In [92], a new methodology was proposed to improve the overall efficiency of inverter motors. First, iron loss, copper loss, motor leakage loss, device conduction loss, and inverter switching loss are modelled. Following that, a new hybrid efficiency and optimization management strategy was proposed, based on the previous loss modeling strategy and the golden ratio search strategy. Experimental results confirmed the effectiveness of the proposed hybrid control strategy (Figure 26). At the same time, an advanced vehicle simulator (ADVISOR) was used to further study the effect of efficiency gains on the driving cycle.
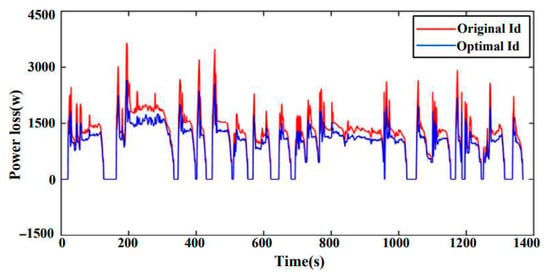
Figure 26.
Comparison of power losses between the system with the original identifier and the system with the optimal identifier.
In [93], the issue of maximizing the use of battery energy for wheeled electric vehicles was considered in detail. Just as in previous studies, a control strategy was developed based on the hierarchy of controllers operating in real time. The controllers in this model have the ability to adapt to current driving conditions and road conditions. The controllers also have the ability to work under conditions of uncertainty. The main focus of the article was devoted to the work of controllers, and other issues were not considered in it.
Of interest is the work of the authors [94] devoted to the study of the operation of a hybrid electric vehicle (4IWMD) with a fuel system and all-wheel drive. Such a car was studied while driving in complex cycles. For such cycles, the authors proposed a control optimization algorithm based on dynamic programming (DP) for torque distribution between the front and rear axles of this hybrid electric vehicle. The modeling process itself was carried out in the MATLAB/Simulink and AVL Cruise software packages. The results were compared with the second control algorithm based on fuzzy logic. Comparison for different motion cycles showed the following results (Figure 27):
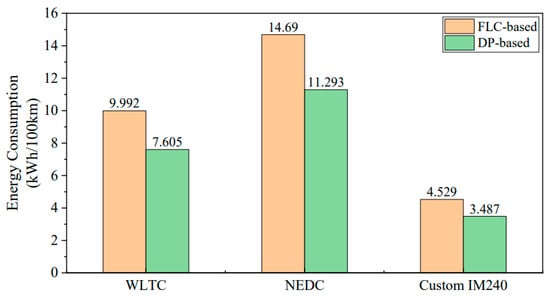
Figure 27.
Energy consumption in three driving cycles using torque distribution based on FLC and DP during the experiment.
- the WLTC cycle reduced power consumption when managing the first algorithm compared to the second was 22.68%;
- the NEDC cycle reduced power consumption when managing the first algorithm in comparison with the second one was 20.73%;
- for the IM240 cycle, the reduction in power consumption when controlling the first algorithm compared to the second was 21.84%;
Comparison of the operation of the first algorithm with the hardware cycle (HIL) also shows a reduction in energy consumption per movement cycle.
The study of the device of an electric vehicle from the point of view of the possibilities of optimizing the modes of its operation was carried out in [95]. The most important part of an electric car is the engine control unit. Of course, software is used to control this unit. A common method of control is field-oriented control (FOC). FOC has space vector pulse width modulation (SVPWM). An alternative to FOC is Model Predictive Control (MPC). MPC is developing and showing significant potential. In [95], these two methods are experimentally compared (Figure 28). The implementation of these methods comes with the use of a digital processor. When these methods are implemented in digital format, issues related to normalization, remodulation, sampling, and field attenuation control are solved. The article shows how, taking into account all these features, torque control algorithms can be implemented both for industrial applications and for electric vehicles. Conducted laboratory experiments show good results for both MPS and FOC algorithms.
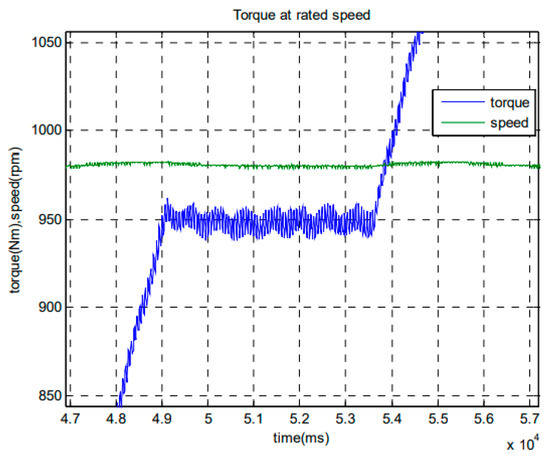
Figure 28.
Torque pulsations by MPC method.
The authors in [96] present the results of studies of the resource of technical systems, which include electric vehicles and storage traction batteries. An analysis of the characteristics that affect their diagnostic features and parameters, which, in turn, are the basis for creating probabilistic mathematical models of the reliability of materials and structures from them, is given. In the article, the authors emphasize the dependence of reliability parameters on external operational factors, such as ambient temperature, humidity, and other parameters.
Battery life largely depends on the nature of its use. Battery surges greatly reduce battery life. This must be taken into account in the operation of the EV as a whole. When operating an EV, driving modes often change. Reducing current surges is possible with the use of a reset switch (RS) and bias technology [97]. This technique is implemented in the control system. This makes it easy to implement this approach. The choice of gain occurs on the basis of proportional-integral controllers. The stability of the entire system is checked by analyzing the transfer function for a weak signal. Verification is carried out using a model (non-linear and switchable) in which the characteristics of a non-ideal electric vehicle are incorporated. Approbation of the approach was carried out on an EV with a brushless DC motor (PMBLDC). The Indian IDC was used as a driving cycle. The proposed technique gave good results, there was an improvement in performance, and the range of travel on a single charge increased.
A rather poorly developed problem is the distribution of traction power for heavy-duty vehicles with an electric power plant. In [98], such a car makes a two-hour urban cycle in the vicinity of Goetheborg. For research, an EV with four identical electric motors was taken. They have a fixed gear ratio. Additionally, each of the engines is connected through a semi-axle with one wheel. Two methods are used to control torque. The first method is based on quadratic programming optimization. The second method is based on an exhaustive offline search. Both of these methods are compared with methods already developed in other works. The comparison results are shown in Figure 29. The developed algorithms, in comparison with the other two, allow for reducing energy consumption by up to 3.9%.
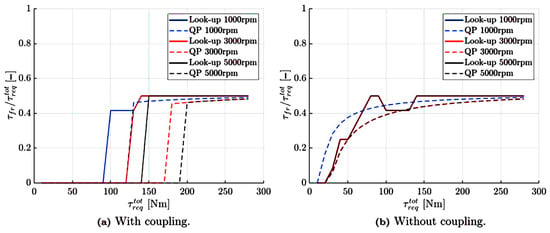
Figure 29.
Ratio of forward and total torque distribution for three different engine speeds, comparison of autonomous optimization and QP: (a) with clutch and (b) without clutch.
A detailed review of the types of power units was carried out by the authors in [99]. Various EV architectures, advantages, and disadvantages of various types of EVs are shown. The generalization carried out in the work by the authors shows that this topic is extremely relevant and is largely aimed at solving the problem of reducing carbon dioxide emissions into the atmosphere. The work of the authors also shows that achievements in this area are constantly updated.
The authors also pay attention to legislative initiatives aimed both at developing the use of electric transport and hindering its spread. This analysis shows that policies and good infrastructure play a critical role in the expansion of electric transport.
After registering 7.2 million global shares in 2019, electric vehicles are growing in popularity, as evidenced by a 30% increase in global market share by 2030. Compared to their internal combustion engine (ICE) counterparts, battery electric vehicles (BEVs) produce no emissions. Currently, one of the widely used motors is asynchronous. Among the control systems for such engines, field-oriented technology (FOC) is gradually fading into the background. Direct Torque Control (DTC) is more common (Figure 30). The aim of [100] is to study the best methods for controlling induction motors for electric vehicle applications by evaluating operating parameters such as improving dynamic performance, reducing torque and flux ripple, and optimizing components. This article highlights some of the emerging problems in engine management and their possible solutions. The Predictive Torque Control (MPTC) model is the Note’s electrical circuit, which is most promising for cars without sensor solutions.
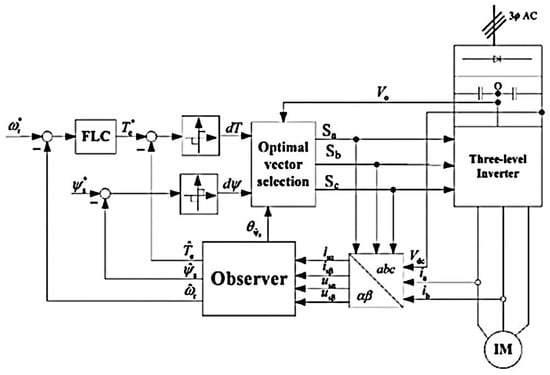
Figure 30.
Sensorless three-level DTC actuator.
While wheel motor technology has reduced the number of components needed in a vehicle’s transmission system, it has also led to many additional technical challenges [101]. The laws of kinematics dictate that when a car is turning, the tires must spin fast enough to provide an instantaneous center of rotation. The speed that provides the instantaneous center of rotation. The Electronic Differential System (EDS) that controls these speeds is necessary to ensure the speed of the wheels on the rear axle and always guarantees traction to drive the car with the least amount of energy. This white paper presents an EDS system designed, implemented, and tested in a virtual environment using MATLAB™, and then implemented the proposed development on a test vehicle. Following that, the proposed development was implemented on experimental machines. Extensive experimental tests showed that the proposed EMF design significantly improved the longitudinal dynamics and energy consumption of the test vehicle power consumption. An important contribution to this work is the development of EDS for all-wheel drive electric vehicles (IWMEV) with a motor directly connected to the rear axle. The design demonstrated efficient energy management, saving up to 21.4% compared to vehicles without EDS, while improving longitudinal dynamic performance and the longitudinal dynamic characteristics.
As shown in [99], battery life (RUL) is one of the important factors limiting the spread of EV. The RUL defines battery management policy and is, in fact, the foundation for addressing the energy efficiency and performance challenges of electric vehicles (EVs). Estimating RUL in real time is an extremely important problem that the authors of [102] tried to solve in their work. To solve this problem, the support vector machine (SVM) algorithm was applied.
To evaluate the performance of the algorithm, it was compared with the neural network (NN) method. The developed algorithm showed a higher accuracy of prediction results. The maximum error obtained using SVM is 5%.
With the rapid proliferation of electric vehicles (EVs), there has been increasing focus in recent decades on the efficiency of drive motors and the cost of producing them. Ref. [103] presents a method for optimizing the design of an electric vehicle engine based on road conditions for more practical design optimization. First, create a motor magnetic circuit model. This model makes it possible to build a performance map. Comparison of the test map and the calculated map makes it possible to check the correctness of the created model. Understanding the road conditions of the New European Driving Cycle (NEDC), the proportion of time and engine conditions allows you to determine the function of the goal. The engine design can then be optimized by setting optimization constraints, including loss limits, volumes, and other geometric possibilities. The two objective functions are plotted with efficiency as the single objective and efficiency weights as the dual objective (Figure 31), and the difference between the two objective functions is the same. Finally, the difference between the two objective functions corresponding to the optimization schemes is analyzed. The optimization method proposed in this article can be used to optimally design drive motors for any road conditions. The resulting optimization design not only takes into account the contradiction between material optimization and thermal design, but also achieves the best target performance under all road conditions.
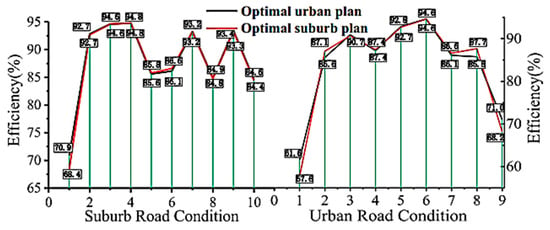
Figure 31.
Comparison of motor efficiency of the optimized scheme.
Controlling the electro-mechanical connection for EV can have a good energy-saving effect. This is shown by both previous studies and the work of the authors [104]. The authors propose a sliding mode control (SMC) algorithm. This algorithm, as shown by the study of the authors, gives good results for electric vehicles with a distributed drive (DDEV). It is used in the Traction Control System (TCS). During the operation of a standard TCS, conditions may arise in certain critical cases leading to a loss of traction. SMC allows you to solve this problem. SMC is based on determining the optimal sliding speed. In this case, the transmission of torque occurs at a higher speed. Simulations using the dSPACE software product have demonstrated that SMC improves handling and dynamic performance for DDEVs.
Improving the dynamics and power consumption of EVs, and especially heavily loaded EVs, is possible by changing the transmission. Through the use of multi-speed gearboxes, more efficient use of power can be obtained. In [105], various options for gearboxes used in EVs are considered. Additionally, an analysis was made not only of the current state of industry and research, but promising approaches were also identified. The driving cycle, as shown by the authors’ studies, can be from a few percent to thirty percent less energy-intensive when using a multi-stage transmission configuration. Of course, the degree of energy saving will depend on the type of vehicle and traffic parameters. Since changing a simple transmission to a multi-speed one is quite expensive, it is necessary to determine the cases when such an improvement will be economically justified.
Algorithms and optimization models were considered in [106] for a single-engine EV. The authors used a convex loss model. This model was built considering the required traction power and EV speed. The purpose of building the model was to develop an algorithm for effective control, considering the design of an electric vehicle. The algorithm was designed to minimize energy consumption in the vehicle motion cycle. Minimization of costs occurs by determining the optimal gear ratio for different transmissions:
- fixed transmission (FGT)
- continuously variable transmission (CVT)
- multi-stage transmission (MGT)
To demonstrate the operation of the algorithm and compare the operation of various types of transmission, a simulation experiment was carried out. A family car was chosen for the experiment. The numerical results showed that the use of MGT (two-stage) reduces the energy consumption of an electric vehicle by 3% (compared to FGT) and 2.5% (compared to CVT) (Figure 32). A further increase in the number of MGT transmissions may lead to an increase in weight, which will reduce the effect of its implementation. In general, an increase in the number of transmissions can even lead to an increase in energy consumption.
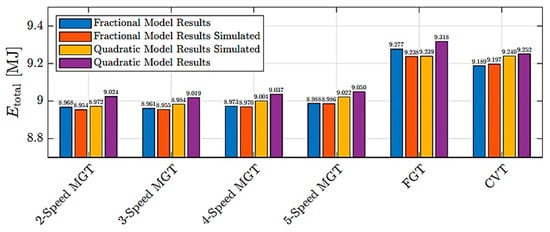
Figure 32.
Power consumption for FGT, MGT, and CVT transmissions for fractional and quadratic models and their respective simulations.
For traction drives, the following energy efficiency measures have been applied: using a cooperative control system in electro-hydraulic hybrid vehicles (improve regeneration efficiency by 22.76%), introducing wheel motor technology into electric vehicles (energy saving) up to 21.4%, and increasing the sustainability of electric vehicles (reducing energy consumption by 21.84–22.68%).
4. Conclusions
The main methods and technologies to increase the efficiency of electric transport were developed back in the middle of the 20th century. However, researchers and scientists were limited by the technology of their time. The physical processes that occur when a train moves have not changed. Their description, boundaries of application, and possibilities of achieving the ultimate goal, namely increasing the energy efficiency of electric transport, increasing the range, etc., were clarified.
Analysis of the majority of authors’ works in the field of energy efficiency of electric transport vehicles showed that a great role is played by construction of the vehicle model. At the heart of vehicle development are physical laws, about which researchers often do not know the full picture of the physical and chemical nature of things and phenomena. Each model has its own field of application, and what is suitable for one object may not correspond to another. There is no one-size-fits-all way to improve energy efficiency. It is necessary to make a choice after a thorough feasibility study among several proposed models.
Thus, this paper considers the main methods and technologies currently used to improve the energy efficiency of electric transport. As can be seen from the presented review, there are different methods for different types of vehicles.
The most effective among general methods of energy efficiency increase are application of electro-mechanical storage (increase of brake energy recovery coefficient by 40.61%), use of quasi-optimal cycle based on dynamic planning (decrease of battery degradation by 15.5% and total cost by 11.4%), and usage of optimal construction and management of traction and heating systems (energy consumption decrease by 7% and increase of battery life by 15%).
Effective methods of regenerative braking, in terms of returning part of the energy to the electric battery, are the model of braking without impairment of rolling stock stability (energy savings of 29.5–30.3%) and application of the braking control strategy (increase in the operating range up to 136.64).
Modern effective methods with regard to energy storage are optimization of power distribution between the supercapacitor and the battery (energy consumption reduction by 5%), automation of vehicle processes (energy efficiency increase by 10–15%), and application of the master–slave electro-hydraulic power unit (15% reduction of battery charge consumption).
From the energy-saving technologies for electric car driving considered in this article, the most effective ones are transmission optimization (3–8% energy saving) and the model of energy management on the basis of electric car on solar battery (450–900 watt output of energy per one vehicle).
The most effective methods of energy storage efficiency increase are application of PHEV energy management policy (operating costs decrease by 48%) and optimization of parameters and energy management strategy of the flywheel device (efficiency increase by 4.1–6.7%).
For the traction drive, the following energy efficiency measures have been applied: use of a coordinated control system for the electric hybrid vehicle (22.76% increase in recovery efficiency), implementation of in-wheel motor technology on electric vehicles (energy savings up to 21.4%), and improved stability of the electric vehicle (21.84–22.68% reduction in energy consumption).
Author Contributions
Conceptualization, N.V.M. and B.V.M.; methodology, I.H.K.; software, M.Q.; validation, V.A.K. and V.V.K.; formal analysis, V.S.T.; investigation, Y.A.T.; resources, V.A.K. and V.V.K.; data curation, Y.A.T.; writing—original draft preparation, N.V.M. and B.V.M.; writing—review and editing, B.V.M., N.V.M. and M.Q.; visualization, I.H.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Data Availability Statement
The data presented in this study are available from the corresponding authors upon reasonable request.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Helen Josephine, V.L.; Vedaiyan, R.; Xavier, V.M.; Winston, J.J.; Jegatheesan, A.; Lakshmi, D.; Raj, J.S. Hybrid Bacterial Foraging Optimization with Sparse Autoencoder for Energy Systems. Comput. Syst. Sci. Eng. 2023, 45, 701–714. [Google Scholar] [CrossRef]
- Yeom, K. Model predictive control and deep reinforcement learning based energy efficient eco-driving for battery electric vehicles. Energy Rep. 2022, 8, 34–42. [Google Scholar] [CrossRef]
- Wang, J.; El Kontar, R.; Jin, X.; King, J. Electrifying High-Efficiency Future Communities: Impact on Energy, Emissions, and Grid. Adv. Appl. Energy 2022, 6, 100095. [Google Scholar] [CrossRef]
- Mamun, K.A.; Islam, F.R.; Haque, R.; Chand, A.A.; Prasad, K.A.; Goundar, K.K.; Prakash, K.; Maharaj, S. Systematic Modeling and Analysis of On-Board Vehicle Integrated Novel Hybrid Renewable Energy System with Storage for Electric Vehicles. Sustainability 2022, 14, 2538. [Google Scholar] [CrossRef]
- Jin, Z.; Li, D.; Hao, D.; Zhang, Z.; Guo, L.; Wu, X.; Yuan, Y. A portable, auxiliary photovoltaic power system for electric vehicles based on a foldable scissors mechanism. Energy Built Environ. 2022. [Google Scholar] [CrossRef]
- Chao, P.-P.; Zhang, R.-Y.; Wang, Y.-D.; Tang, H.; Dai, H.-L. Warning model of new energy vehicle under improving time-to-rollover with neural network. Meas. Control. 2022, 55, 1004–1015. [Google Scholar] [CrossRef]
- Kokourov, D.V.; Malozyomov, B.V. Algorithm for improving energy efficient wheel motor for electric vehicles. J. Phys. Conf. Ser. 2021, 2061, 012049. [Google Scholar] [CrossRef]
- Laadjal, K.; Cardoso, A.J.M. Estimation of Lithium-Ion Batteries State-Condition in Electric Vehicle Applications. Issues and State of the Art. Electronics 2021, 10, 1588. [Google Scholar] [CrossRef]
- Arango, I.; Lopez, C.; Ceren, A. Improving the Autonomy of a Mid-Drive Motor Electric Bicycle Based on System Efficiency Maps and Its Performance. World Electr. Veh. J. 2021, 12, 59. [Google Scholar] [CrossRef]
- Mei, J.; Zuo, Y.; Lee, C.H.; Wang, X.; Kirtley, J.L. Stochastic optimization of multi-energy system operation considering hydrogen-based vehicle applications. Adv. Appl. Energy 2021, 2, 100031. [Google Scholar] [CrossRef]
- Wu, X. Research and Implementation of Electric Vehicle Braking Energy Recovery System Based on Computer. J. Phys. Conf. Ser. 2021, 1744, 022080. [Google Scholar] [CrossRef]
- Istomin, S. Development of a system for electric power consumption control by electric rolling stock on traction tracks of locomotive depots. IOP Conf. Ser. Mater. Sci. Eng. 2020, 918, 012157. [Google Scholar] [CrossRef]
- Domanov, K.; Shatohin, A.; Nezevak, V.; Cheremisin, V. Improving the technology of operating electric locomotives using electric power storage device. E3S Web Conf. 2019, 110, 01033. [Google Scholar] [CrossRef]
- Debelov, V.V.; Endachev, D.V.; Yakunov, D.M.; Deev, O.I. Charging balance management technology for low-voltage battery in the car control unit with combined power system. IOP Conf. Ser. Mater. Sci. Eng. 2019, 534, 012029. [Google Scholar] [CrossRef]
- Widmer, F.; Ritter, A.; Duhr, P.; Onder, C.H. Battery lifetime extension through optimal design and control of traction and heating systems in hybrid drivetrains. eTransportation 2022, 14, 100196. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, M.; Wei, Z.; Lu, M. The energy management and economic optimization scheduling of microgrid based on Colored Petri net and Quantum-PSO algorithm. Sustain. Energy Technol. Assess. 2022, 53, 102670. [Google Scholar] [CrossRef]
- Tormos, B.; Pla, B.; Bares, P.; Pinto, D. Energy Management of Hybrid Electric Urban Bus by Off-Line Dynamic Programming Optimization and One-Step Look-Ahead Rollout. Appl. Sci. 2022, 12, 4474. [Google Scholar] [CrossRef]
- Zhou, J.; Feng, C.; Su, Q.; Jiang, S.; Fan, Z.; Ruan, J.; Sun, S.; Hu, L. The Multi-Objective Optimization of Powertrain Design and Energy Management Strategy for Fuel Cell–Battery Electric Vehicle. Sustainability 2022, 14, 6320. [Google Scholar] [CrossRef]
- Pusztai, Z.; Kőrös, P.; Szauter, F.; Friedler, F. Vehicle Model-Based Driving Strategy Optimization for Lightweight Vehicle. Energies 2022, 15, 3631. [Google Scholar] [CrossRef]
- Graber, G.; Calderaro, V.; Galdi, V. Two-Stage Optimization Method for Sizing Stack and Battery Modules of a Fuel Cell Vehicle Based on a Power Split Control. Electronics 2022, 11, 361. [Google Scholar] [CrossRef]
- Davydenko, L.; Davydenko, N.; Bosak, A.; Bosak, A.; Deja, A.; Dzhuguryan, T. Smart Sustainable Freight Transport for a City Multi-Floor Manufacturing Cluster: A Framework of the Energy Efficiency Monitoring of Electric Vehicle Fleet Charging. Energies 2022, 15, 3780. [Google Scholar] [CrossRef]
- Lu, Y.; Liu, W.; Wu, Y.; Li, H.; Liu, Y.; Peng, J.; Huang, Z. A Quasi-Optimal Energy Management Strategy for Hybrid Energy Vehicles Using Temporal Characteristic. Adv. Transdiscipl. Eng. 2022, 22, 392–397. [Google Scholar] [CrossRef]
- Ferrara, A.; Zendegan, S.; Koegeler, H.-M.; Gopi, S.; Huber, M.; Pell, J.; Hametner, C. Optimal Calibration of an Adaptive and Predictive Energy Management Strategy for Fuel Cell Electric Trucks. Energies 2022, 15, 2394. [Google Scholar] [CrossRef]
- Gim, J.; Kim, M.; Ahn, C. Energy Management Control Strategy for Saving Trip Costs of Fuel Cell/Battery Electric Vehicles. Energies 2022, 15, 2131. [Google Scholar] [CrossRef]
- Geng, S.; Schulte, T.; Maas, J. Model-Based Analysis of Different Equivalent Consumption Minimization Strategies for a Plug-In Hybrid Electric Vehicle. Appl. Sci. 2022, 12, 2905. [Google Scholar] [CrossRef]
- Donatantonio, F.; Ferrara, A.; Polverino, P.; Arsie, I.; Pianese, C. Novel Approaches for Energy Management Strategies of Hybrid Electric Vehicles and Comparison with Conventional Solutions. Energies 2022, 15, 1972. [Google Scholar] [CrossRef]
- Sun, B.; Gu, T.; Xie, M.; Wang, P.; Gao, S.; Zhang, X. Strategy Design and Performance Analysis of an Electromechanical Flywheel Hybrid Scheme for Electric Vehicles. Sustainability 2022, 14, 11017. [Google Scholar] [CrossRef]
- Sandrini, G.; Chindamo, D.; Gadola, M. Regenerative Braking Logic That Maximizes Energy Recovery Ensuring the Vehicle Stability. Energies 2022, 15, 5846. [Google Scholar] [CrossRef]
- Lu, Q.; Zhou, W.; Zheng, Y. Regenerative Braking Control Strategy with Real-Time Wavelet Transform for Composite Energy Buses. Machines 2022, 10, 673. [Google Scholar] [CrossRef]
- Mariani, V.; Rizzo, G.; Tiano, F.A.; Glielmo, L. A model predictive control scheme for regenerative braking in vehicles with hybridized architectures via aftermarket kits. Control. Eng. Pract. 2022, 123, 105142. [Google Scholar] [CrossRef]
- Zou, X. Analysis of Slip rate Control Technology of Electric Vehicle Based on Sliding Mode Algorithm. J. Phys. Conf. Ser. 2022, 2254, 012034. [Google Scholar] [CrossRef]
- Liu, S.; Li, Z.; Ji, H.; Wang, L.; Hou, Z. A Novel Anti-Saturation Model-Free Adaptive Control Algorithm and Its Application in the Electric Vehicle Braking Energy Recovery System. Symmetry 2022, 14, 580. [Google Scholar] [CrossRef]
- Liu, C.; Zhang, K. Research on regenerative braking energy recovery strategy of electric vehicle. J. Phys. Conf. Ser. 2021, 2030, 012003. [Google Scholar] [CrossRef]
- Hensher, D.A.; Wei, E.; Liu, W. Battery electric vehicles in cities: Measurement of some impacts on traffic and government revenue recovery. J. Transp. Geogr. 2021, 94, 103121. [Google Scholar] [CrossRef]
- Caban, J. Technologies of using energy harvesting systems in motor vehicles—Energy from suspension system. Eng. Rural Dev. 2021, 20, 1470–1477. [Google Scholar] [CrossRef]
- Shchurov, N.I.; Dedov, S.I.; Malozyomov, B.V.; Shtang, A.A.; Martyushev, N.V.; Klyuev, R.V.; Andriashin, S.N. Degradation of Lithium-Ion Batteries in an Electric Transport Complex. Energies 2021, 14, 8072. [Google Scholar] [CrossRef]
- Henao-Muñoz, A.C.; Pereirinha, P.; Bouscayrol, A. Regenerative Braking Strategy of a Formula SAE Electric Race Car Using Energetic Macroscopic Representation. World Electr. Veh. J. 2020, 11, 45. [Google Scholar] [CrossRef]
- Liu, H.; Lei, Y.; Fu, Y.; Li, X. Multi-Objective Optimization Study of Regenerative Braking Control Strategy for Range-Extended Electric Vehicle. Appl. Sci. 2020, 10, 1789. [Google Scholar] [CrossRef]
- Yeo, W.; Jung, S.; Kim, S.; Park, K.; Ko, J. A Regenerative Energy Recovery System for Electric Vehicles Charging A Battery at A Low Speed. Adv. Sci. Technol. Eng. Syst. J. 2020, 5, 64–73. [Google Scholar] [CrossRef]
- Li, S.; Yu, B.; Feng, X. Research on braking energy recovery strategy of electric vehicle based on ECE regulation and I curve. Sci. Prog. 2020, 103, 0036850419877762. [Google Scholar] [CrossRef]
- Xu, L.; He, X.; Wang, Q.; Yu, Y. Experimental Study on the Influence Factors of the Recovery Rate of the Braking Energy of Electric Control & HydroDrive Hybrid Vehicle. IOP Conf. Ser. Mater. Sci. Eng. 2018, 452, 032093. [Google Scholar] [CrossRef]
- Gang, L.; Zhi, Y. Energy saving control based on motor efficiency map for electric vehicles with four-wheel independently driven in-wheel motors. Adv. Mech. Eng. 2018, 10, 1687814018793064. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, D.; Zhang, H.; Liu, Y. Research on the influence factors of brake regenerative energy of pure electric vehicles based on the CLTC. Energy Rep. 2022, 8, 85–93. [Google Scholar] [CrossRef]
- Mei, P.; Karimi, H.R.; Yang, S.; Xu, B.; Huang, C. An adaptive fuzzy sliding-mode control for regenerative braking system of electric vehicles. Recent Adv. Robust Adapt. Control. 2022, 36, 391–410. [Google Scholar] [CrossRef]
- Pipitone, E.; Caltabellotta, S. Efficiency Advantages of the Separated Electric Compound Propulsion System for CNG Hybrid Vehicles. Energies 2021, 14, 8481. [Google Scholar] [CrossRef]
- Miranda, M.H.R.; Silva, F.L.; Lourenço, M.A.M.; Eckert, J.J.; Silva, L.C.A. Vehicle drivetrain and fuzzy controller optimization using a planar dynamics simulation based on a real-world driving cycle. Energy 2022, 257, 124769. [Google Scholar] [CrossRef]
- Shi, D.; Li, S.; Liu, K.; Wang, Y.; Liu, R.; Guo, J. Adaptive Energy Management Strategy Based on Intelligent Prediction of Driving Cycle for Plug−In Hybrid Electric Vehicle. Processes 2022, 10, 1831. [Google Scholar] [CrossRef]
- Jia, Q.; Zhang, H.; Zhang, Y.; Yang, J.; Wu, J. Parameter Matching and Performance Analysis of a Master-Slave Electro-Hydraulic Hybrid Electric Vehicle. Processes 2022, 10, 1664. [Google Scholar] [CrossRef]
- Sabri, M.F.M.; Sarawak, U.M.; Husin, M.H.; Suhaili, S.; Masra, S.M.W. Adaptive energy management strategy for sustainable operation of hybrid electric vehicle. J. Sustain. Sci. Manag. 2022, 17, 159–171. [Google Scholar] [CrossRef]
- Neufville, R.; Abdalla, H.; Abbas, A. Potential of Connected Fully Autonomous Vehicles in Reducing Congestion and Associated Carbon Emissions. Sustainability 2022, 14, 6910. [Google Scholar] [CrossRef]
- Hu, J.; Xiao, F.; Peng, H.; Zhao, W. CVT discrete speed ratio optimizations based on energy efficiency for PHEV. Alex. Eng. J. 2022, 61, 4095–4105. [Google Scholar] [CrossRef]
- Lamedica, R.; Maccioni, M.; Ruvio, A.; Carere, F.; Mortelliti, N.; Gatta, F.M.; Geri, A. Optimization of e-Mobility Service for Disabled People Using a Multistep Integrated Methodology. Energies 2022, 15, 2751. [Google Scholar] [CrossRef]
- Watanabe, R.; Ibuki, T.; Sakayanagi, Y.; Funada, R.; Sampei, M. Risk-Aware Energy Management for Drive Mode Control in Plug-in Hybrid Electric Vehicles. IEEE Access 2022, 10, 103619–103631. [Google Scholar] [CrossRef]
- Abdelaal, A.S.; Mukhopadhyay, S.; Rehman, H. Battery Energy Management Techniques for an Electric Vehicle Traction System. IEEE Access 2022, 10, 84015–84037. [Google Scholar] [CrossRef]
- East, S.; Cannon, M. Scenario Model Predictive Control for Data-Based Energy Management in Plug-In Hybrid Electric Vehicles. IEEE Trans. Control. Syst. Technol. 2022, 30, 2522–2533. [Google Scholar] [CrossRef]
- Khemir, M.; Rojas, M.; Popova, R.; Feizi, T.; Nguyen, H.Q.; Heinekamp, J.F.; Strunz, K. Real-World Application of Sustainable Mobility in Urban Microgrids. In Proceedings of the 2020 International Conference on Smart Energy Systems and Technologies (SEST), Istanbul, Turkey, 7–9 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Ebrahim, H.; Dominy, R.; Martin, N. Aerodynamics of electric cars in platoon SAGE publications. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 1396–1408. [Google Scholar] [CrossRef]
- Ebrahim, H.; Dominy, R. The Effect of Afterbody Geometry on Passenger Vehicles in Platoon. Energies 2021, 14, 7553. [Google Scholar] [CrossRef]
- Chen, Y.; Sun, R.; Wu, X. Estimating Bounds of Aerodynamic, Mass, and Auxiliary Load Impacts on Autonomous Vehicles: A Powertrain Simulation Approach. Sustainability 2021, 13, 12405. [Google Scholar] [CrossRef]
- Gao, J.; Yang, Y.; Gao, F.; Liang, P. Optimization of Electric Vehicles Based on Frank-CopulaGlueCVaR Combined Wind and Photovoltaic Output Scheduling Research. Energies 2021, 14, 6080. [Google Scholar] [CrossRef]
- Ouramdane, O.; Elbouchikhi, E.; Amirat, Y.; Sedgh Gooya, E. Optimal Sizing and Energy Management of Microgrids with Vehicle-to-Grid Technology: A Critical Review and Future Trends. Energies 2021, 14, 4166. [Google Scholar] [CrossRef]
- Miraftabzadeh, S.M.; Longo, M.; Foiadelli, F. Estimation Model of Total Energy Consumptions of Electrical Vehicles under Different Driving Conditions. Energies 2021, 14, 854. [Google Scholar] [CrossRef]
- Franceschi, A.; Cavina, N.; Parenti, R.; Reggiani, M.; Corti, E. Energy Management Optimization of a Dual Motor Lithium-Ion Capacitors-Based Hybrid Super Sport Car. Appl. Sci. 2021, 11, 885. [Google Scholar] [CrossRef]
- Jiang, M.; Zhang, Y. Optimal Electric Bus Scheduling under Travel Time Uncertainty: A Robust Model and Solu-tion Method. J. Adv. Transp. 2021, 2021, 1191443. [Google Scholar] [CrossRef]
- East, S.; Cannon, M. Optimal Power Allocation in Battery/Supercapacitor Electric Vehicles Using Convex Optimization. IEEE Trans. Veh. Technol. 2020, 69, 12751–12762. [Google Scholar] [CrossRef]
- Hwang, G.; Lee, K.; Kim, J.; Lee, K.-J.; Lee, S.; Kim, M. Energy Management Optimization of Series Hybrid Electric Bus Using an Ultra-Capacitor and Novel Efficiency Improvement Factors. Sustainability 2020, 12, 7354. [Google Scholar] [CrossRef]
- Rahmat, A.; Fahmi, M.I.; Fang, L.H.; Mustafa, A.A.; Noh, H.M.T.; Saifizi, M. The performance of the Optimisation and Regenerative Braking systems by using PI controlling technique for Electric Vehicle (EV). J. Phys. Conf. Ser. 2022, 2312, 012022. [Google Scholar] [CrossRef]
- Puma-Benavides, D.S.; Izquierdo-Reyes, J.; Galluzzi, R.; Calderon-Najera, J.d.D. Influence of the Final Ratio on the Consumption of an Electric Vehicle under Conditions of Standardized Driving Cycles. Appl. Sci. 2021, 11, 11474. [Google Scholar] [CrossRef]
- Malozyomov, B.; Konyukhov, V.; Daudov, I. Selection algorithm and prospects for the use of modern energy storage devices used in vehicles. J. Phys. Conf. Ser. 2020, 1661, 012199. [Google Scholar] [CrossRef]
- Jiang, L.; Zhang, Y.; Li, T.; Diao, X.; Zhang, J. Analysis on Charging Safety and Optimization of Electric Vehicles. In Proceedings of the 2020 IEEE 6th International Conference on Computer and Communications (ICCC), Chengdu, China, 11–14 December 2020. INSPEC Accession Number: 20426406. [Google Scholar] [CrossRef]
- Kulikov, K.; Schurov, N. Vehicle energy consumption as factor of combined power plant parameters’ definition. J. Phys. Conf. Ser. 2020, 1661, 012146. [Google Scholar] [CrossRef]
- Zhu, G.; Lin, J.; Liu, Q.; He, H. Research on the Energy-Saving Strategy of Path Planning for Electric Vehicles Considering Traffic Information. Energies 2019, 12, 3601. [Google Scholar] [CrossRef]
- Zhang, Y.; Yuan, W.; Fu, R.; Wang, C. Design of an Energy-Saving Driving Strategy for Electric Buses. IEEE Access 2019, 7, 157693–157706. [Google Scholar] [CrossRef]
- Yu, J.; Yao, L.; Ren, C.; Yan, X.; Lin, L. Design, analysis, and experimental validation of a novel seamless automatic transmission for electric vehicle. Adv. Mech. Eng. 2018, 10, 1687814018760021. [Google Scholar] [CrossRef]
- Ramineni, P.; Pandian, A.; Kumar, M.K.; Sundaram, K.M. Improved operation of Li-ion battery with supercapacitor realized to solar-electric vehicle. Energy Rep. 2022, 8, 256–264. [Google Scholar] [CrossRef]
- Chakraborty, P.; Parker, R.; Hoque, T.; Cruz, J.; Du, L.; Wang, S.; Bhunia, S. Addressing the range anxiety of battery electric vehicles with charging en route. Sci. Rep. 2022, 12, 5588. [Google Scholar] [CrossRef]
- Naseri, F.; Barbu, C.; Sarikurt, T. Optimal sizing of hybrid high-energy/high-power battery energy storage systems to improve battery cycle life and charging power in electric vehicle applications. J. Energy Storage 2022, 55, 105768. [Google Scholar] [CrossRef]
- Sun, B.; Gu, T.; Li, B.; Wang, P.; Gao, S.; Wei, S. Design and application of electromechanical flywheel hybrid device for electric vehicle. Energy Rep. 2022, 8, 12570–12582. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, Y.; Zhang, H.; Yang, F.; Ren, J.; Wang, X.; Jin, P.; Huang, D. Research on the energy management strategy of extended range electric vehicles based on a hybrid energy storage system. Energy Rep. 2022, 8, 6602–6623. [Google Scholar] [CrossRef]
- Zhao, W.; Zhang, T.; Kildahl, H.; Ding, Y. Mobile energy recovery and storage: Multiple energy powered EVs and refuelling stations. Energy 2022, 257, 124697. [Google Scholar] [CrossRef]
- Lin, X.; Bogdan, P.; Chang, N.; Pedram, M. Machine learning-based energy management in a hybrid electric vehicle to minimize total operating cost. In Proceedings of the 2015 IEEE/ACM International Conference on Computer-Aided Design (ICCAD), Austin, TX, USA, 2–6 November 2015; pp. 627–634. [Google Scholar] [CrossRef]
- Teodorescu, R.; Sui, X.; Vilsen, S.B.; Bharadwaj, P.; Kulkarni, A.; Stroe, D.-I. Smart Battery Technology for Lifetime Improvement. Batteries 2022, 8, 169. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, Z.; Wang, S.; Lin, N. An Investigation of Opportunity Charging with Hybrid Energy Storage System on Electric Bus with Two-Speed Transmission. Sustainability 2022, 14, 11918. [Google Scholar] [CrossRef]
- Klyuev, R.V.; Morgoev, I.D.; Morgoeva, A.D.; Gavrina, O.A.; Martyushev, N.V.; Efremenkov, E.A.; Mengxu, Q. Methods of Forecasting Electric Energy Consumption: A Literature Review. Energies 2022, 15, 8919. [Google Scholar] [CrossRef]
- Amry, Y.; Elbouchikhi, E.; Le Gall, F.; Ghogho, M.; El Hani, S. Electric Vehicle Traction Drives and Charging Station Power Electronics: Current Status and Challenges. Energies 2022, 15, 6037. [Google Scholar] [CrossRef]
- Olindo, R.; Schmitt, N.; Vogtländer, J. Life Cycle Assessments on Battery Electric Vehicles and Electrolytic Hydrogen: The Need for Calculation Rules and Better Databases on Electricity. Sustainability 2021, 13, 5250. [Google Scholar] [CrossRef]
- Tang, Q.; Yang, Y.; Luo, C.; Yang, Z.; Fu, C. A novel electro-hydraulic compound braking system coordinated control strategy for a four-wheel-drive pure electric vehicle driven by dual motors. Energy 2022, 241, 122750. [Google Scholar] [CrossRef]
- Elahi, M.Q.; Elsaadany, M.; Rehman, H.; Mukhopadhyay, S. Battery Energy Consumption Optimization for the EV Traction System. In Proceedings of the 2022 IEEE 16th International Conference on Compatibility, Power Electronics, and Power Engineering (CPE-POWERENG), Birmingham, UK, 29 June–1 July 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Shchurov, N.I.; Myatezh, S.V.; Malozyomov, B.V.; Shtang, A.A.; Martyushev, N.V.; Klyuev, R.V.; Dedov, S.I. Determination of Inactive Powers in a Single-Phase AC Network. Energies 2021, 14, 4814. [Google Scholar] [CrossRef]
- Yu, Z.; Feng, H.; Meng, Y.; Xu, E.; Wu, Y. Braking energy management strategy for electric vehicles based on working condition prediction. AIP Adv. 2022, 12, 015220. [Google Scholar] [CrossRef]
- Ferraris, A.; Pinheiro, H.d.C.; Galanzino, E.; Airale, A.G.; Carello, M. All-Wheel Drive Electric Vehicle Performance Optimization: From Modelling to Subjective Evaluation on a Static Simulator. In Proceedings of the 2019 Electric Vehicles International Conference (EV), Bucharest, Romania, 3–4 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Ding, X.; Guo, H.; Xiong, R.; Chen, F.; Zhang, D.; Gerada, C. A new strategy of efficiency enhancement for traction systems in electric vehicles. Appl. Energy 2017, 205, 880–891. [Google Scholar] [CrossRef]
- Xi, J.; Li, M.; Xu, M. Optimal energy management strategy for battery powered electric vehicles. Appl. Energy 2014, 134, 332–341. [Google Scholar] [CrossRef]
- Adeleke, O.P.; Li, Y.; Chen, Q.; Zhou, W.; Xu, X.; Cui, X. Torque Distribution Based on Dynamic Programming Algorithm for Four In-Wheel Motor Drive Electric Vehicle Considering Energy Efficiency Optimization. World Electr. Veh. J. 2022, 13, 181. [Google Scholar] [CrossRef]
- Men, X.; Guo, Y.; Wu, G.; Chen, S.; Shi, C. Implementation of an Improved Motor Control for Electric Vehicles. Energies 2022, 15, 4833. [Google Scholar] [CrossRef]
- Isametova, M.E.; Nussipali, R.; Martyushev, N.V.; Malozyomov, B.V.; Efremenkov, E.A.; Isametov, A. Mathematical Modeling of the Reliability of Polymer Composite Materials. Mathematics 2022, 10, 3978. [Google Scholar] [CrossRef]
- Chauhan, A.; Mandal, K.; Panda, A. Performance Improvement of Electric Vehicle using Reset Switch and Bias. IFAC-PapersOnLine 2022, 55, 144–149. [Google Scholar] [CrossRef]
- Torinsson, J.; Jonasson, M.; Yang, D.; Jacobson, B. Energy reduction by power loss minimisation through wheel torque allocation in electric vehicles: A simulation-based approach. Veh. Syst. Dyn. 2022, 60, 1488–1511. [Google Scholar] [CrossRef]
- Wahid, M.R.; Budiman, B.A.; Joelianto, E.; Aziz, M. A Review on Drive Train Technologies for Passenger Electric Vehicles. Energies 2021, 14, 6742. [Google Scholar] [CrossRef]
- Firdaus, A.Z.A.; Azmi, S.A.; Kamarudin, K.; Hwai, L.; Ali, H.; Azalan, M.S.Z.; Kasa, Z.C.M. Assessment of Control Drive Technologies for Induction Motor: Industrial Application to Electric Vehicle. J. Phys. Conf. Ser. 2021, 1878, 012047. [Google Scholar] [CrossRef]
- Julio-Rodríguez, J.d.C.; Santana-Díaz, A.; Ramirez-Mendoza, R.A. Individual Drive-Wheel Energy Management for Rear-Traction Electric Vehicles with In-Wheel Motors. Appl. Sci. 2021, 11, 4679. [Google Scholar] [CrossRef]
- Li, X.; Shu, X.; Shen, J.; Xiao, R.; Yan, W.; Chen, Z. An On-Board Remaining Useful Life Estimation Algorithm for Lithium-Ion Batteries of Electric Vehicles. Energies 2017, 10, 691. [Google Scholar] [CrossRef]
- Wu, Z.; Li, W.; Liu, X. Optimal design of the drive motor based on the road condition of the electric vehicle. IET Electr. Power Appl. 2021, 15, 379–389. [Google Scholar] [CrossRef]
- Gao, X.; Lin, C. Electromechanical Coupling Approach for Traction Control System of Distributed Drive Electric Vehicles. E3S Web Conf. 2021, 236, 01007. [Google Scholar] [CrossRef]
- Machado, F.A.; Kollmeyer, P.J.; Barroso, D.G.; Emadi, A. Multi-Speed Gearboxes for Battery Electric Vehicles: Current Status and Future Trends. IEEE Open J. Veh. Technol. 2021, 2, 419–435. [Google Scholar] [CrossRef]
- van den Hurk, J.; Salazar, M. Energy-optimal Design and Control of Electric Vehicles’ Transmissions. In Proceedings of the 2021 IEEE Vehicle Power and Propulsion Conference (VPPC), Gijón, Spain, 25–28 October 2021; pp. 1–7. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).