
Modeling and Simulating Wind Energy Generation Systems by Means of Co-Simulation Techniques

 , , , and
, , , and 
Abstract
:1. Introduction
Motivation and Contribution of the Work
- (i)
- Mathematical Models: The compilation of a set of models for Wind Energy Conversion System (WECS) units, allowing for a comprehensive representation of the system’s dynamic behavior for the industrial frequency range. Furthermore, these models serve as valuable tools for analyzing and optimizing the performance of the interconnected components in various operating conditions.
- (ii)
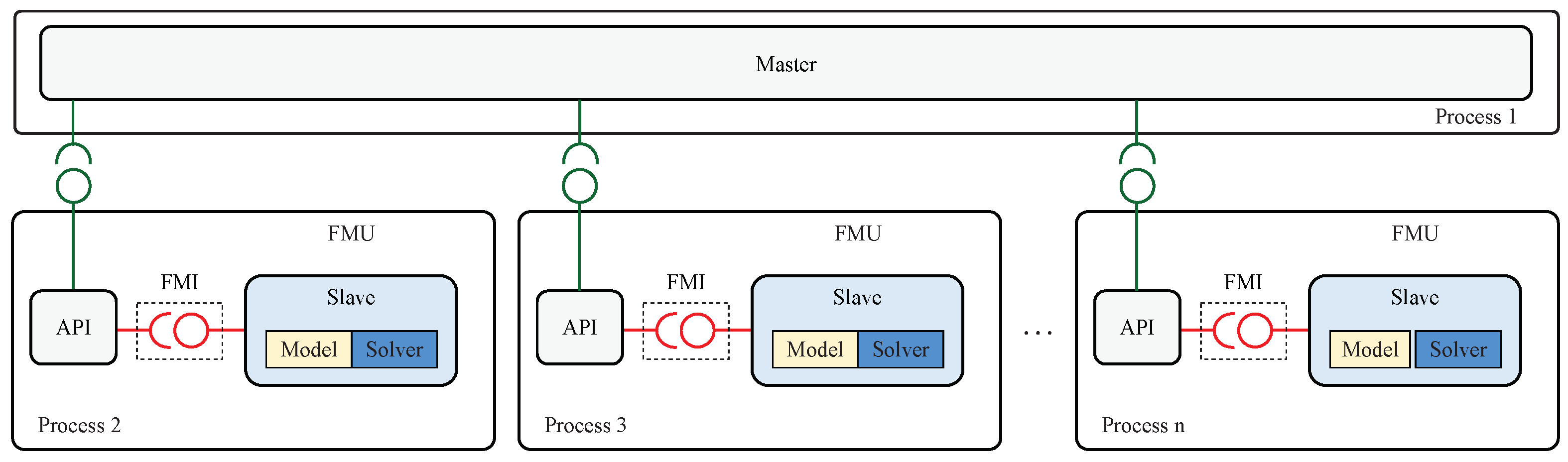
- Interface Standard: The co-simulation is attained with the aid of the Functional Mock-up Interface (FMI) standard [13], which aims at making models, developed for different simulation tools, compatible. As one possibility for subsystem integration, the FMI standard allows one to encapsulate whole subsystems into a single Functional Mock-up Unit (FMU), which contains a machine-compiled mathematical description of the subsystem at hand. Depending on the FMU type, a numerical solver can also be embedded in it. As a by-product of the FMU encapsulation, provided by the FMI standard, one can identify the improved intellectual property protection, which can be vital for certain applications.
- (iii)
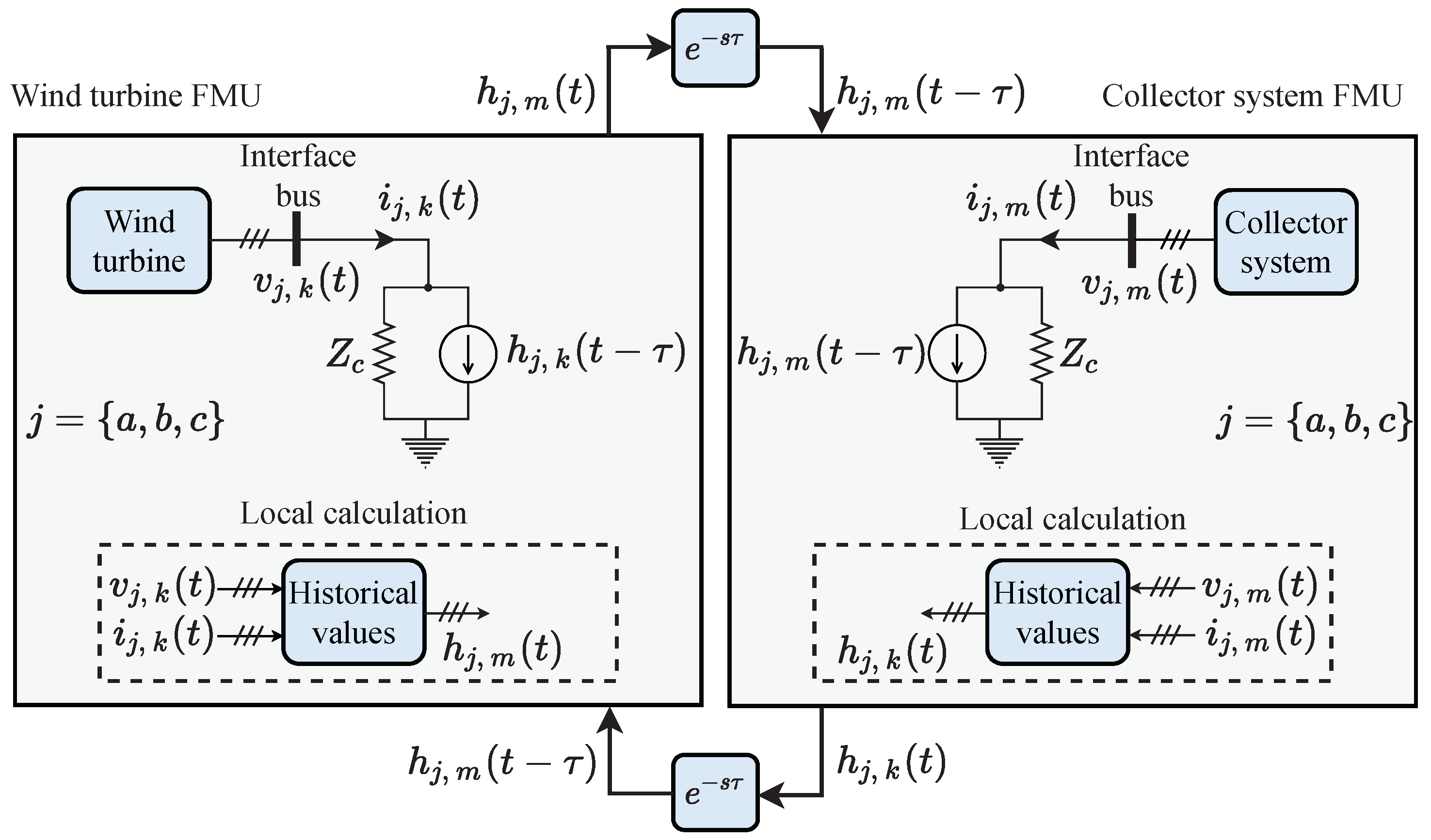
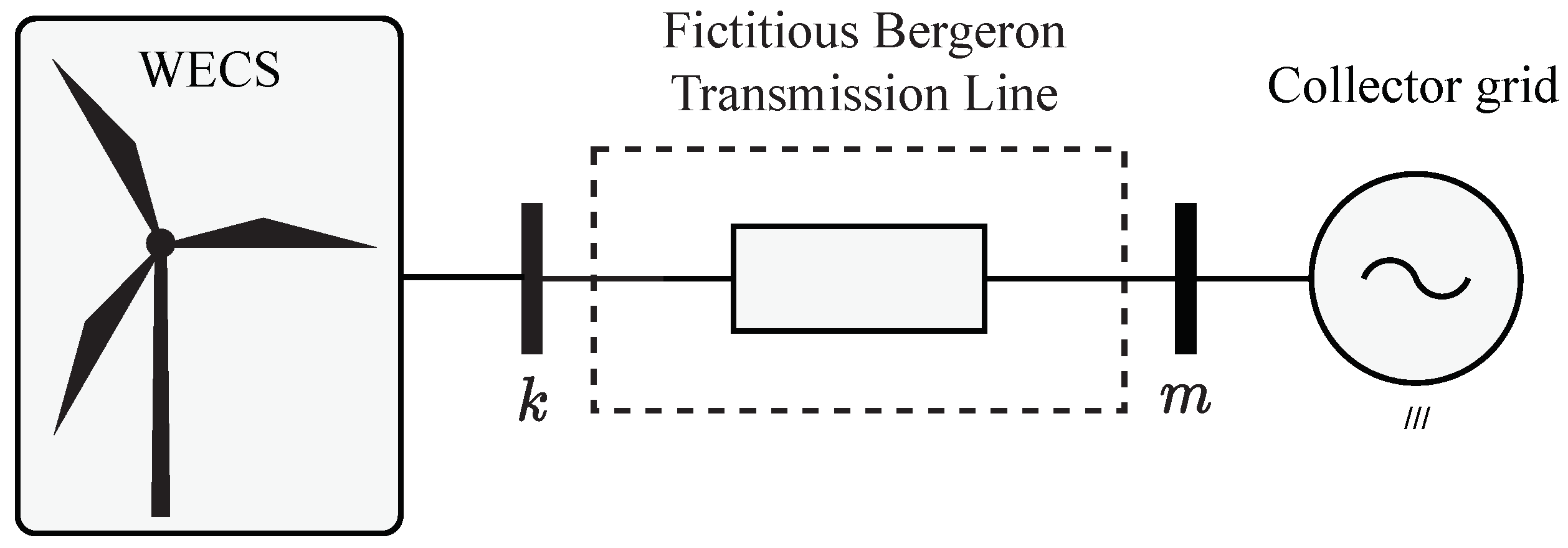
- Digital Simulation: The implementation of a parallel-processed co-simulation framework based on open-source tools and standards for inter-process communication and mathematical model interfaces is detailed. The use of a fictitious Bergeron transmission line model, which partitions large-scale power systems into smaller subsystems, provided accurate and stable results, by means of co-simulation techniques.
- (iv)
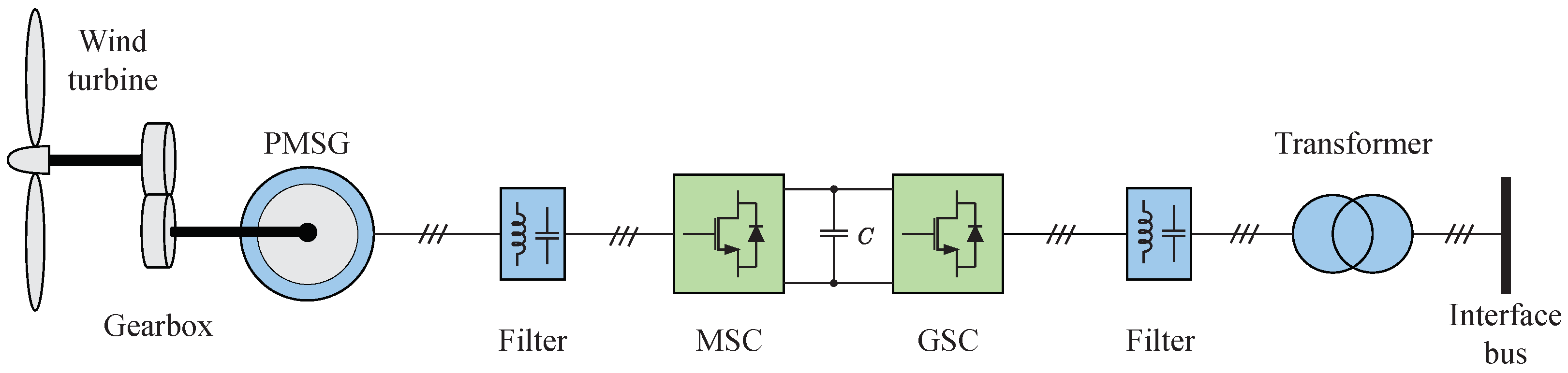
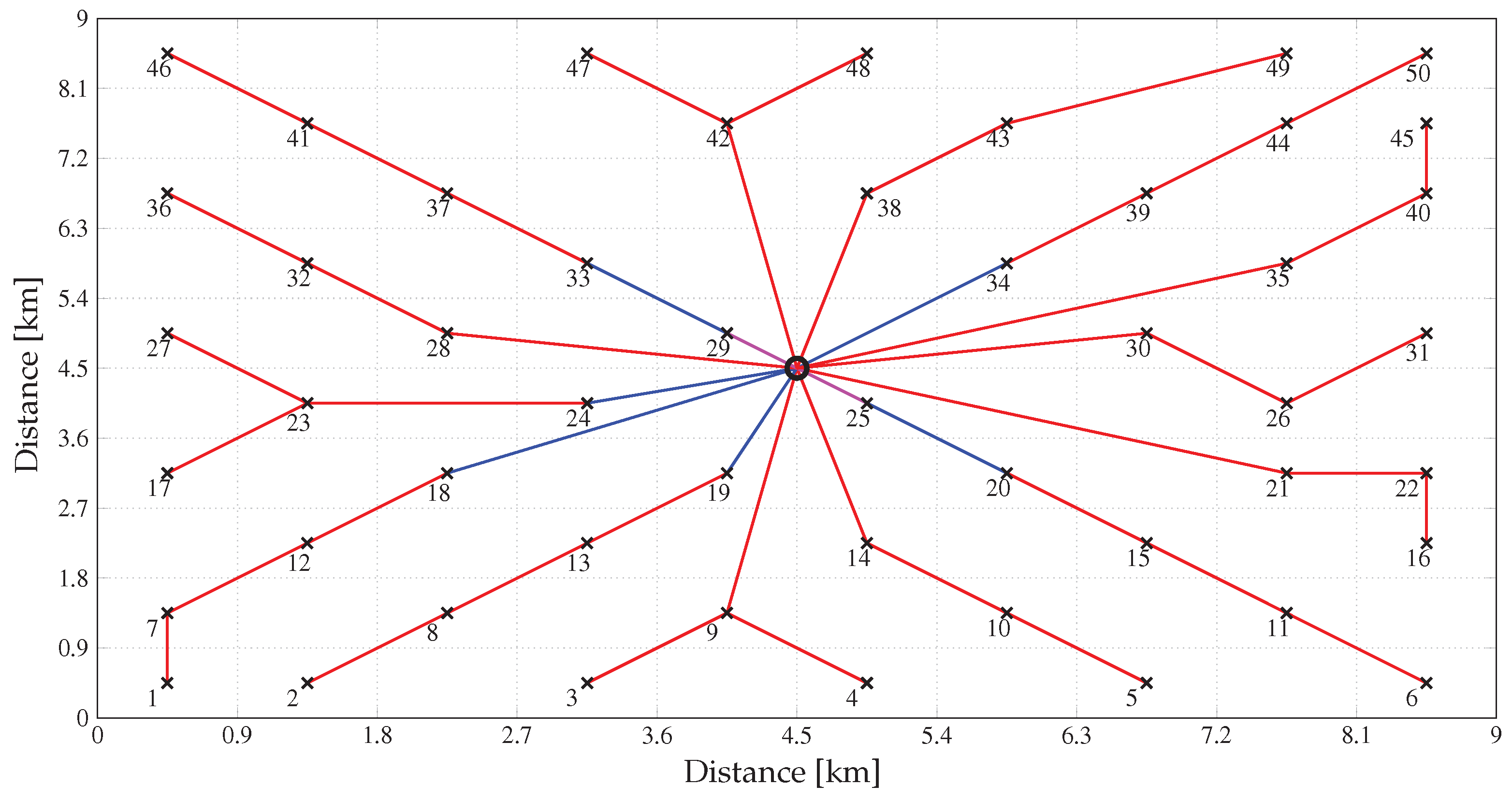
- Evaluation and Testing: To validate the proposed approach, simulations considering a wind power plant (WPP) with an AC medium-voltage collector system with 50 wind generation units are performed. The WECS adopted in this paper is constituted by a wind turbine coupled to a permanent magnet synchronous generator through a gearbox and back-to-back two-level voltage-source-based power converters. The mathematical models are developed into Modelica language [14], whereas the co-simulation master algorithm is implemented in Python with the aid of the message-passing parallel programming paradigm provided by the message-passing interface (MPI) standard.
2. Wind Energy Conversion System
2.1. Wind Turbine Model
2.2. PMSG Dynamic Model
2.3. Grid-Side Dynamic Model
3. Co-Simulation Algorithm
- Independent development of models for each area by separate working groups with access to only essential information is feasible.
- The choice of simulation tools for each area becomes irrelevant, since data exchange occurs over a network using a standard protocol.
- Models can be kept private, if necessary, as only selected interface variables need to be shared with other simulators at runtime.
- Responsibilities related to model development and maintenance naturally divide among those with access to their respective information.
- The integration of new simulators or models can be achieved with ease.
- The distributed nature of co-simulation enables the sharing of the computational workload of the simulation.
3.1. Functional Mock-Up Interface
3.2. The Transmission Line Subsystem Coupling
- At time , the FMUs are initialized, including historical current values.
- Numerical integration of each FMU is performed.
- The currents and are sent to the master, which, in turn, redistributes them to their associated subsystems.
- FMUs update their input values.
- Advance time .
- Steps (2) to (6) are repeated until the end of the simulation.
3.3. Communication Protocol
4. Test System
5. Simulation Results
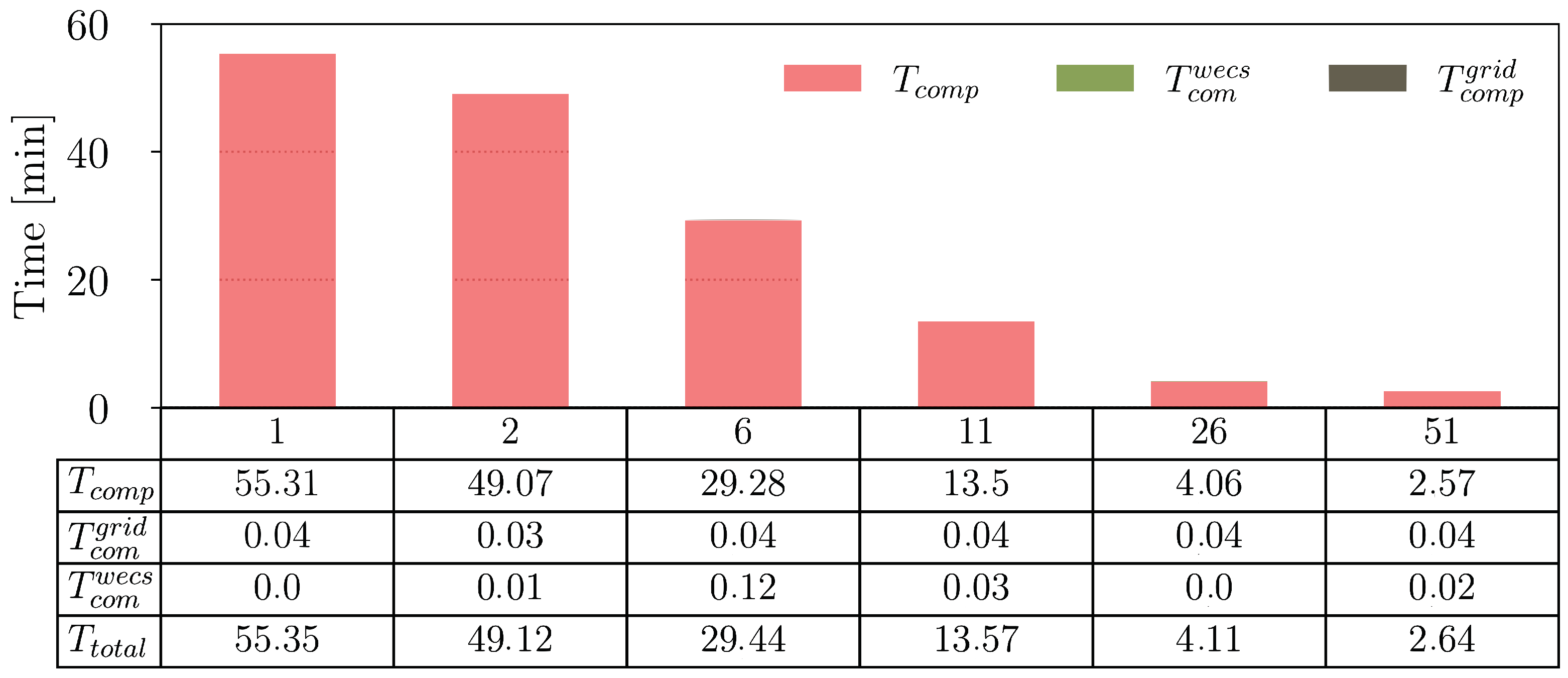
5.1. Computational Performance
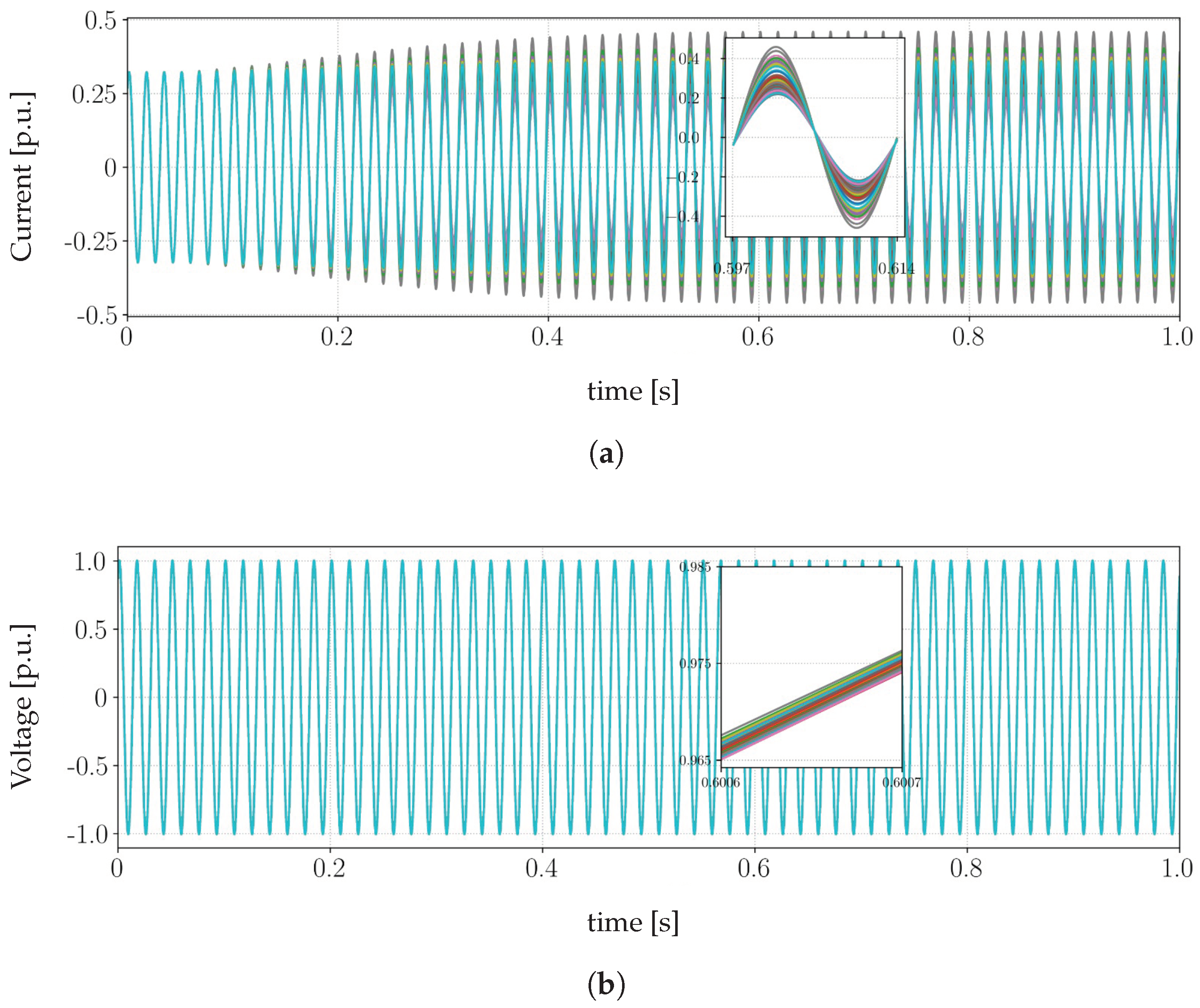
5.2. Voltage Dip at the Collecting Substation
5.3. Wind Velocity Variation
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Main Wind Farm Parameters and Controllers Gains

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Rated power | 10 | |
| Optimal tip speed ratio | 10.59 | |
| Maximum power coefficient | 0.47 | |
| WT diameter | D | 180 |
| Initial wind speed | 2.96 | |
| Rated wind speed | 11.26 | |
| Maximum wind speed | 25 | |
| Minimum turbine rotation | 6.9 | |
| Rated turbine rotation | 12.1 | |
| Gearbox ratio | 1:15 | |
| WT moment of inertia | ||
| WT mechanical damping constant |
| Constant | Value | Constant | Value |
|---|---|---|---|
| 0.1828 | 9.1004 | ||
| 176.7595 | 13.0017 | ||
| −2.0587 | −0.0381 | ||
| 1.8007 | −0.0340 | ||
| 1.1989 |
| Parameter | Symbol | Value |
|---|---|---|
| Rated power | 10 | |
| Rated voltage | 3 | |
| Electric rated frequency | 20 | |
| Minimum rotation speed | 90 | |
| Maximum rotation speed | 180 | |
| Permanent magnet flux linkage | 16.244 | |
| Rotor moment of inertia | 475.860 | |
| Stator winding resistance | 8.945 | |
| Stator synchronous inductances | 1.424 |
| Parameter | Symbol | Value |
|---|---|---|
| PWM carrier wave frequency | 5 | |
| Series filter resistance | 51 | |
| Series filter inductance | 5 | |
| DC link average voltage | 10 | |
| DC link capacitance | 400 |
| Parameter | Symbol | Value |
|---|---|---|
| PWM carrier wave frequency | 5 | |
| Series filter resistance | 51 | |
| Series filter inductance | 5 | |
| Shunt filter resistance | 6 | |
| Shunt filter capacitance | 98 |
| Side | Parameter | Symbol | Value |
|---|---|---|---|
| MSC | proportional gain | 1.2890 | |
| Integral gain | 12.8473 | ||
| GSC | proportional gain | 1.0 | |
| Integral gain | 25.5 |
| Side | Parameter | Symbol | Value |
|---|---|---|---|
| MSC | proportional gain | ||
| (WT rotation) | Integral gain | ||
| GSC | proportional gain | ||
| (DC link voltage) | Integral gain |
| From | To | R [%] | X [%] | d [km] | From | To | R [%] | X [%] | d [km] |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 7 | 0.425 | 0.388 | 0.9 | 39 | 34 | 0.601 | 0.5487 | 1.2728 |
| 2 | 8 | 0.601 | 0.5487 | 1.2728 | 40 | 35 | 0.601 | 0.5487 | 1.2728 |
| 3 | 9 | 0.601 | 0.5487 | 1.2728 | 41 | 37 | 0.601 | 0.5487 | 1.2728 |
| 4 | 9 | 0.601 | 0.5487 | 1.2728 | 43 | 38 | 0.601 | 0.5487 | 1.2728 |
| 5 | 10 | 0.601 | 0.5487 | 1.2728 | 44 | 39 | 0.601 | 0.5487 | 1.2728 |
| 6 | 11 | 0.601 | 0.5487 | 1.2728 | 45 | 40 | 0.425 | 0.388 | 0.9 |
| 7 | 12 | 0.601 | 0.5487 | 1.2728 | 46 | 41 | 0.601 | 0.5487 | 1.2728 |
| 8 | 13 | 0.601 | 0.5487 | 1.2728 | 47 | 42 | 0.601 | 0.5487 | 1.2728 |
| 10 | 14 | 0.601 | 0.5487 | 1.2728 | 48 | 42 | 0.601 | 0.5487 | 1.2728 |
| 11 | 15 | 0.601 | 0.5487 | 1.2728 | 49 | 43 | 0.9503 | 0.8676 | 2.0125 |
| 12 | 18 | 0.601 | 0.5487 | 1.2728 | 50 | 44 | 0.601 | 0.5487 | 1.2728 |
| 13 | 19 | 0.601 | 0.5487 | 1.2728 | 9 | 51 | 1.5026 | 1.3718 | 3.182 |
| 15 | 20 | 0.601 | 0.5487 | 1.2728 | 14 | 51 | 1.0835 | 0.9893 | 2.2946 |
| 22 | 21 | 0.425 | 0.388 | 0.9 | 18 | 51 | 0.8343 | 1.059 | 2.6239 |
| 16 | 22 | 0.425 | 0.388 | 0.9 | 19 | 51 | 0.4525 | 0.5743 | 1.423 |
| 17 | 23 | 0.601 | 0.5487 | 1.2728 | 21 | 51 | 1.6184 | 1.4775 | 3.4271 |
| 27 | 23 | 0.601 | 0.5487 | 1.2728 | 24 | 51 | 0.4525 | 0.5743 | 1.423 |
| 23 | 24 | 0.85 | 0.776 | 1.8 | 25 | 51 | 0.1356 | 0.2399 | 0.6364 |
| 20 | 25 | 0.4047 | 0.5137 | 1.2728 | 28 | 51 | 1.0835 | 0.9893 | 2.2946 |
| 31 | 26 | 0.601 | 0.5487 | 1.2728 | 29 | 51 | 0.1356 | 0.2399 | 0.6364 |
| 32 | 28 | 0.601 | 0.5487 | 1.2728 | 30 | 51 | 1.0835 | 0.9893 | 2.2946 |
| 33 | 29 | 0.4047 | 0.5137 | 1.2728 | 34 | 51 | 0.607 | 0.7705 | 1.9092 |
| 26 | 30 | 0.601 | 0.5487 | 1.2728 | 35 | 51 | 1.6184 | 1.4775 | 3.4271 |
| 36 | 32 | 0.601 | 0.5487 | 1.2728 | 38 | 51 | 1.0835 | 0.9893 | 2.2946 |
| 37 | 33 | 0.601 | 0.5487 | 1.2728 | 42 | 51 | 1.5026 | 1.3718 | 3.182 |
References
- Issacs, A. Simulation technology: The evolution of power system modeling. IEEE Power Energy Mag. 2017, 15, 88–102. [Google Scholar] [CrossRef]
- Kundur, P.; Paserba, J.; Ajjarapu, V.; Andersson, G.; Bose, A.; Canizares, C.; Hatziargyriou, N.; Hill, D.; Stankovic, A.; Taylor, C.; et al. Definition and classification of power system stability IEEE/CIGRE joint task force on stability terms and definitions. IEEE Trans. Power Syst. 2004, 19, 1387–1401. [Google Scholar]
- Watson, N.; Arrillaga, J. Power Systems Electromagnetic Transients Simulation; IET Power and Energy Series; The Institution of Engineering and Technology (IET): Bodmin, UK, 2003; Volume 39. [Google Scholar]
- Campello, T.; Varricchio, S.; Taranto, G. Representation of multiport rational models in an electromagnetic transients program: Networks with lumped and distributed parameters. Electr. Power Syst. Res. 2020, 178, 106029. [Google Scholar] [CrossRef]
- Hussein, D.N.; Matar, M.; Iravani, R. A wideband equivalent model of type-3 wind power plants for EMT studies. IEEE Trans. Power Deliv. 2016, 31, 2322–2331. [Google Scholar] [CrossRef]
- Gomes, C.; Thule, C.; Broman, D.; Larsen, P.G.; Vangheluwe, H. Co-simulation: State of the art. arXiv 2017, arXiv:1702.00686. [Google Scholar]
- Andersson, C. Methods and Tools for Co-Simulation of Dynamic Systems with the Functional Mock-up Interface. Ph.D. Thesis, Lund University, Lund, Sweden, 2016. [Google Scholar]
- Shu, D.; Wei, Y.; Dinavahi, V.; Wang, K.; Yan, Z.; Li, X. Cosimulation of Shifted-Frequency/Dynamic Phasor and Electromagnetic Transient Models of Hybrid LCC-MMC DC Grids on Integrated CPU–GPUs. IEEE Trans. Ind. Electron. 2019, 67, 6517–6530. [Google Scholar] [CrossRef]
- Rupasinghe, J.; Filizadeh, S.; Gole, A.M.; Strunz, K. Multi-rate co-simulation of power system transients using dynamic phasor and EMT solvers. J. Eng. 2020, 2020, 854–862. [Google Scholar] [CrossRef]
- Tremblay, O.; Rimorov, D.; Gagnon, R.; Fortin-Blanchette, H. A multi-time-step transmission line interface for power hardware-in-the-loop simulators. IEEE Trans. Energy Convers. 2019, 35, 539–548. [Google Scholar] [CrossRef]
- Le-Huy, P.; Sybille, G.; Giroux, P.; Loud, L.; Huang, J.; Kamwa, I. Real-time electromagnetic transient and transient stability co-simulation based on hybrid line modelling. IET Gener. Transm. Distrib. 2017, 11, 2983–2990. [Google Scholar] [CrossRef]
- Niemeyer, G.; Slotine, J.J. Stable adaptive teleoperation. IEEE J. Ocean. Eng. 1991, 16, 152–162. [Google Scholar] [CrossRef]
- Modelica Association Project FMI. The Leading Standard to Exchange Dynamic Simulation Models. 2021. Available online: https://fmi-standard.org (accessed on 1 January 2021).
- The Modelica Association. Modelica Language. 2021. Available online: https://modelica.org/language (accessed on 1 February 2021).
- Yaramasu, V.; Wu, B.; Sen, P.C.; Kouro, S.; Narimani, M. High-power wind energy conversion systems: State-of-the-art and emerging technologies. Proc. IEEE 2015, 103, 740–788. [Google Scholar] [CrossRef]
- Yazdani, A.; Iravani, R. Voltage-Sourced Converters in Power Systems: Modeling, Control, and Applications; Wiley-IEEE: Hoboken, NJ, USA, 2010. [Google Scholar]
- Slootweg, J.G.; Polinder, H.; Kling, W.L. Representing wind turbine electrical generating systems in fundamental frequency simulations. IEEE Trans. Energy Convers. 2003, 18, 516–524. [Google Scholar] [CrossRef]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; Technical Report; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2009. [Google Scholar]
- Krause, P.; Wasynczuk, O.; Sudhoff, S. Analysis of Electric Machinery and Drive Systems, 2nd ed.; IEEE Press Series on Power Engineering; IEEE Press: New York, NY, USA, 2002. [Google Scholar]
- Paulo, M.S.; Almeida, A.O.; Almeida, P.M.; Barbosa, P.G. Control of an Offshore Wind Farm Considering Grid-Connected and Stand-Alone Operation of a High-Voltage Direct Current Transmission System Based on Multilevel Modular Converters. Energies 2023, 16, 5891. [Google Scholar] [CrossRef]
- Rodriguez, P.; Teodorescu, R.; Candela, I.; Timbus, A.V.; Liserre, M.; Blaabjerg, F. New positive-sequence voltage detector for grid synchronization of power converters under faulty grid conditions. In Proceedings of the 37th IEEE Power Electronics Specialists Conference, Jeju, Republic of Korea, 18–22 June 2006; IEEE: Hoboken, NJ, USA, 2006; pp. 1–7. [Google Scholar]
- Hussein, D.N.; Matar, M.; Iravani, R. A type-4 wind power plant equivalent model for the analysis of electromagnetic transients in power systems. IEEE Trans. Power Syst. 2012, 28, 3096–3104. [Google Scholar] [CrossRef]
- Palensky, P.; Cvetković, M.; Keviczky, T. Intelligent Integrated Energy Systems: The PowerWeb Program at TU Delft; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Silva, L.T.F.W. Modeling and Co-Simulation of Wind Energy Generation Systems. Master’s Thesis, Universidade Federal de Juiz de Fora, Juiz de Fora, Brazil, 2020. (In Portuguese). [Google Scholar]
- Theodoro, T.S. Hybrid Simulation in the Time Domain of Electromechanical and Electromagnetic Transients: Integration of a Wind Turbine Based on Doubly Fed Induction Generator. Master’s Thesis, Universidade Federal de Juiz de Fora, Juiz de Fora, Brazil, 2016. (In Portuguese). [Google Scholar]
- Theodoro, T.S.; Tomim, M.A.; Barbosa, P.G.; Lima, A.C.S.; de Barros, M.T.C. A flexible co-simulation framework for penetration studies of power electronics based renewable sources: A new algorithm for phasor extraction. Int. J. Electr. Power Energy Syst. 2019, 113, 419–435. [Google Scholar] [CrossRef]
- Arrillaga, J.; Arnold, C. Computer Analysis of Power Systems; Wiley: New York, NY, USA, 1990. [Google Scholar]
- Cabral, V.A.; Marliere, F.T.; Panoeiro, F.F.; Rebello, G.S.; Oliveira, L.W.; da Silva Junior, I.C. Wind Farm Collector System Optimization via Modified Bat-Inspired Algorithm. In Proceedings of the 13th Latin-American Congress on Electricity Generation and Transmission-Clagtee, Santiago, Chile, 20–23 October 2019. [Google Scholar]
- Wu, B.; Lang, Y.; Zargari, N.; Kouro, S. Power Conversion and Control of Wind Energy Systems; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 76. [Google Scholar]
- Grama, A.; Kumar, V.; Gupta, A.; Karypis, G. Introduction to Parallel Computing; Pearson Education: London, UK, 2003. [Google Scholar]






| Parameter | Symbol | Value |
|---|---|---|
| PMSG base power | 10 | |
| PMSG base voltage | 3 | |
| Collector grid base voltage | 66 | |
| Time step | 50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
da Silva, L.T.F.W.; Tomim, M.A.; Barbosa, P.G.; de Almeida, P.M.; da Silva Dias, R.F. Modeling and Simulating Wind Energy Generation Systems by Means of Co-Simulation Techniques. Energies 2023, 16, 7013. https://doi.org/10.3390/en16197013
da Silva LTFW, Tomim MA, Barbosa PG, de Almeida PM, da Silva Dias RF. Modeling and Simulating Wind Energy Generation Systems by Means of Co-Simulation Techniques. Energies. 2023; 16(19):7013. https://doi.org/10.3390/en16197013
Chicago/Turabian Styleda Silva, Loan Tullio F. W., Marcelo Aroca Tomim, Pedro Gomes Barbosa, Pedro Machado de Almeida, and Robson Francisco da Silva Dias. 2023. "Modeling and Simulating Wind Energy Generation Systems by Means of Co-Simulation Techniques" Energies 16, no. 19: 7013. https://doi.org/10.3390/en16197013
APA Styleda Silva, L. T. F. W., Tomim, M. A., Barbosa, P. G., de Almeida, P. M., & da Silva Dias, R. F. (2023). Modeling and Simulating Wind Energy Generation Systems by Means of Co-Simulation Techniques. Energies, 16(19), 7013. https://doi.org/10.3390/en16197013