
Future Cities Carbon Emission Models: Hybrid Vehicle Emission Modelling for Low-Emission Zones


Abstract
:1. Introduction
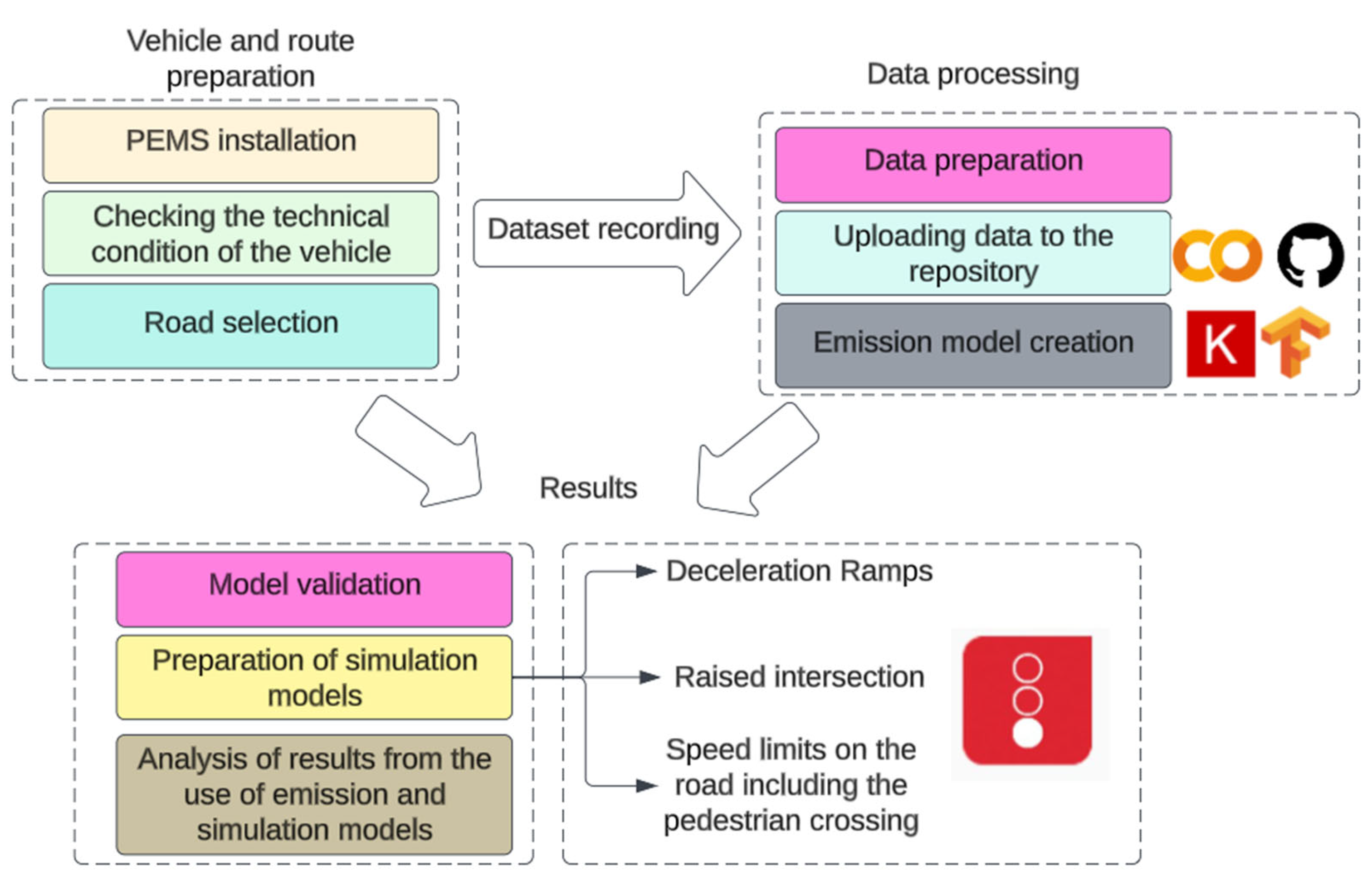
2. Materials and Methods
2.1. Data Collection and Processing
| Algorithm 1. CO2 emission model for a hybrid vehicle, source code. |
| import pandas as pd |
| import numpy as np |
| from sklearn.model_selection import train_test_split |
| from sklearn.preprocessing import StandardScaler |
| import tensorflow as tf |
| from tensorflow import keras |
| from tensorflow.keras import layers |
| from sklearn.metrics import mean_squared_error |
| # Load data from the data repository |
| file_path = “/content/hybrid po filtracji.xlsx” # Update this with the actual file path |
| df = pd.read_excel(file_path) |
| # Select features (V and a) and target variable (CO2) |
| X = df[[‘V’, ‘a’]].values |
| y = df[‘CO2 g/s’].values |
| # Split the data into training and testing sets |
| X_train, X_test, y_train, y_test = train_test_split(X, y, test_size = 0.2, random_state = 42) |
| # Standardize the features |
| scaler = StandardScaler() |
| X_train_scaled = scaler.fit_transform(X_train) |
| X_test_scaled = scaler.transform(X_test) |
| # Build the neural network model |
| model = keras.Sequential([ |
| layers.Input(shape = (2,)), # Input layer with 2 features (V and a) |
| layers.Dense(64, activation = ‘relu’), # Hidden layer with 64 neurons and ReLU activation |
| layers.Dense(1) # Output layer with 1 neuron for CO2 prediction |
| ]) |
| # Compile the model |
| model.compile(optimizer = ‘adam’, loss = ‘mean_squared_error’) |
| # Train the model |
| model.fit(X_train_scaled, y_train, epochs = 50, batch_size = 32, validation_split = 0.2, verbose = 1) |
| # Evaluate the model |
| y_pred = model.predict(X_test_scaled) |
| mse = mean_squared_error(y_test, y_pred) |
| print(f”Mean Squared Error: {mse:.2f}”) |
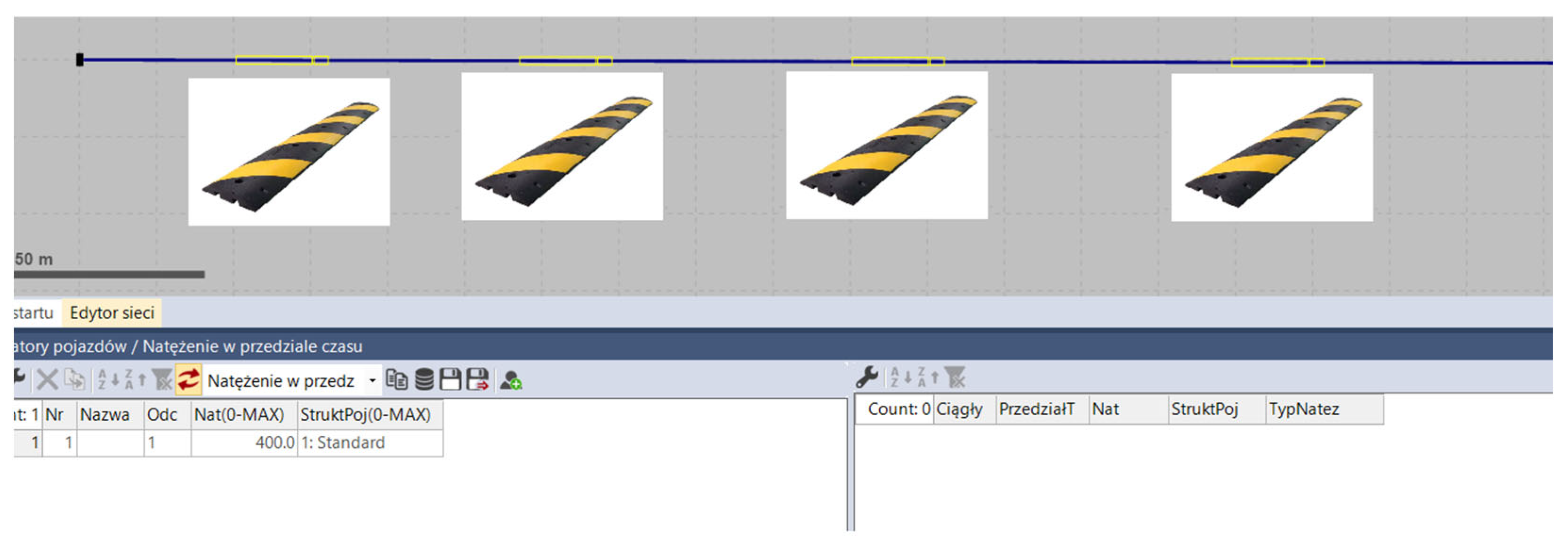
2.2. Analysed Scenarios
- Speed bumps for 4 different deceleration speeds—30 km/h, 25 km/h, 20 km/h, and 15 km/h.
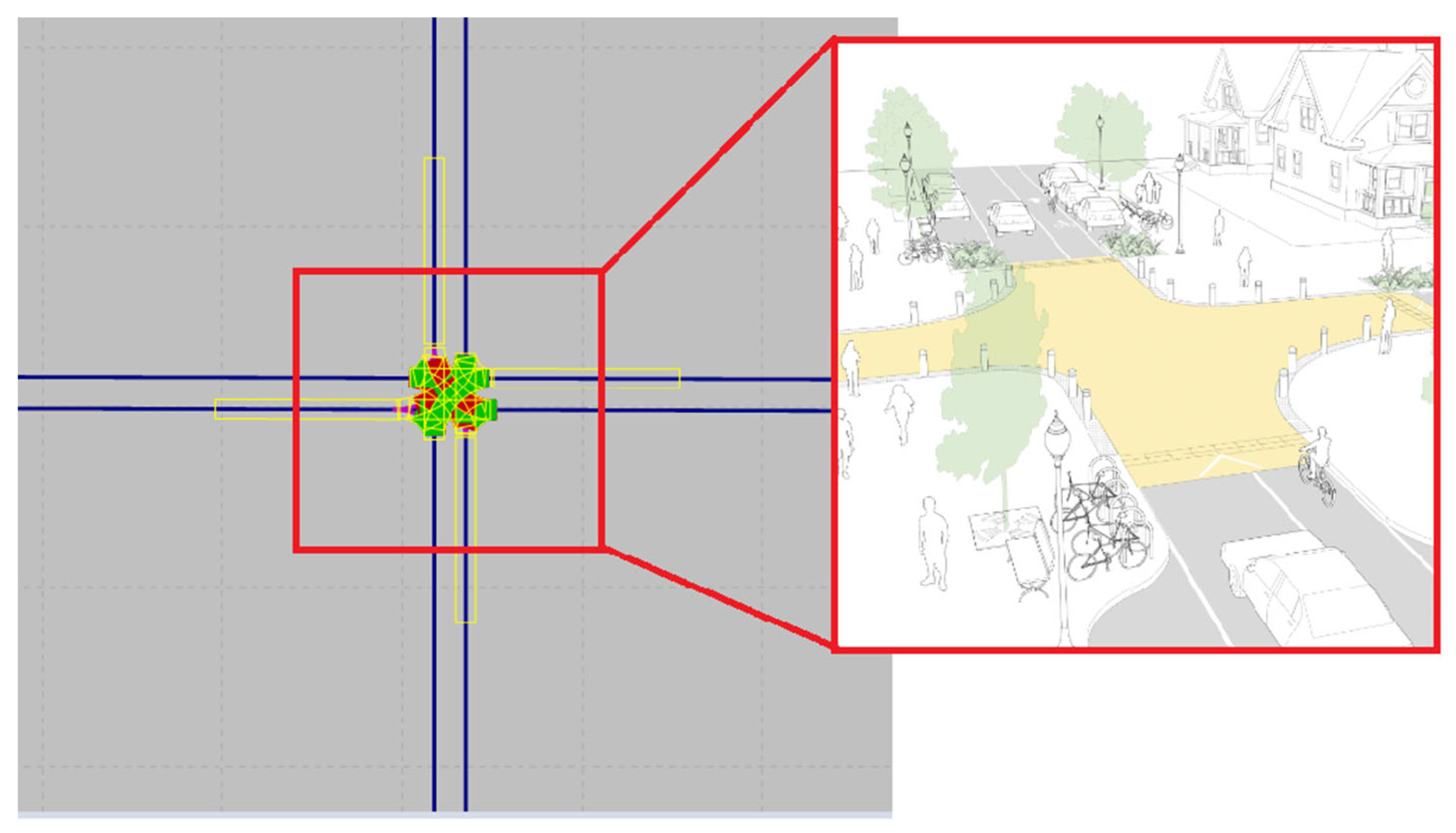
- Raised X-shaped intersection.
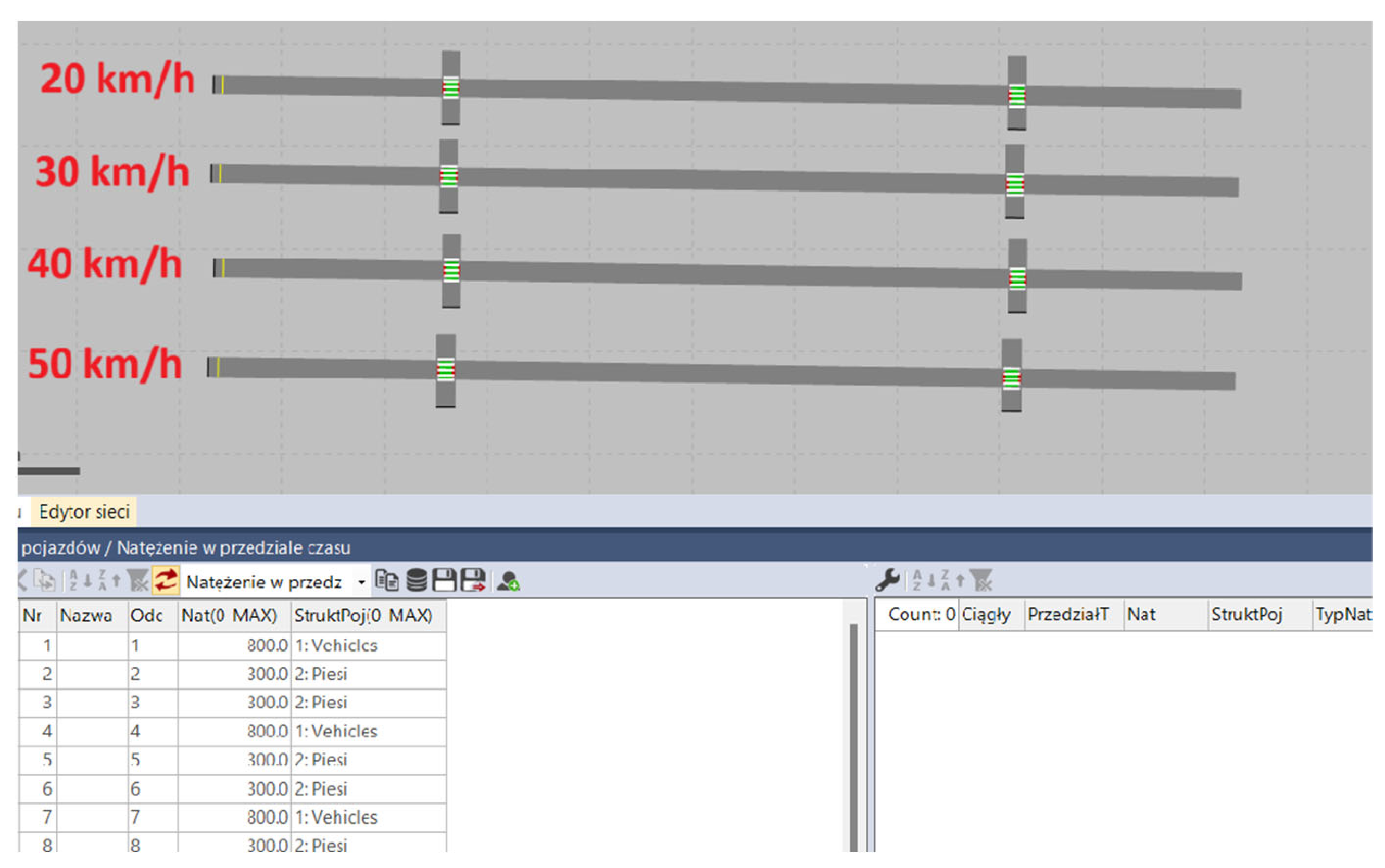
- Road speed limits including pedestrian crossing, tested speeds: 20 km/h, 30 km/h, 40 km/h, 50 km/h.
3. Results
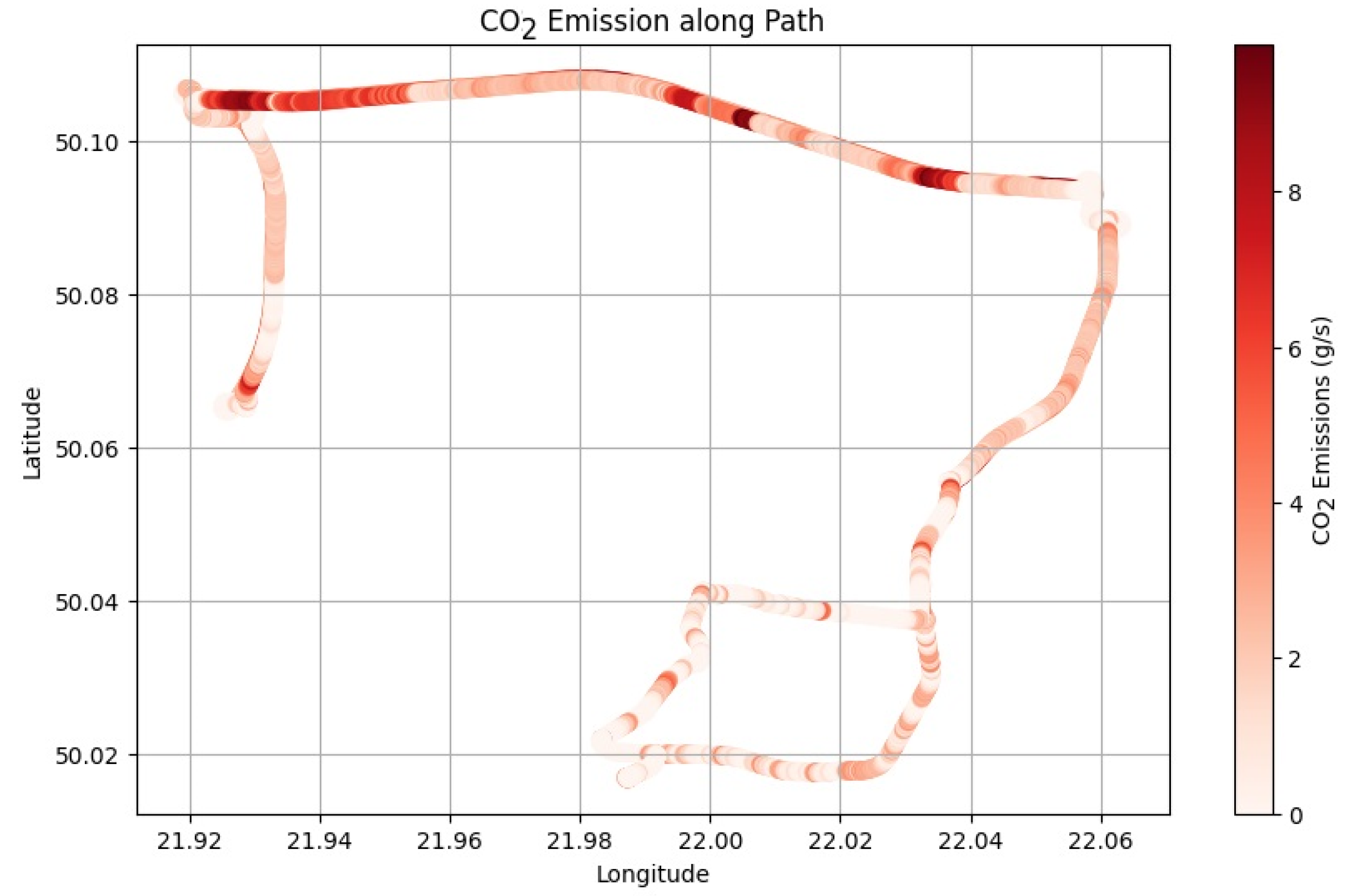
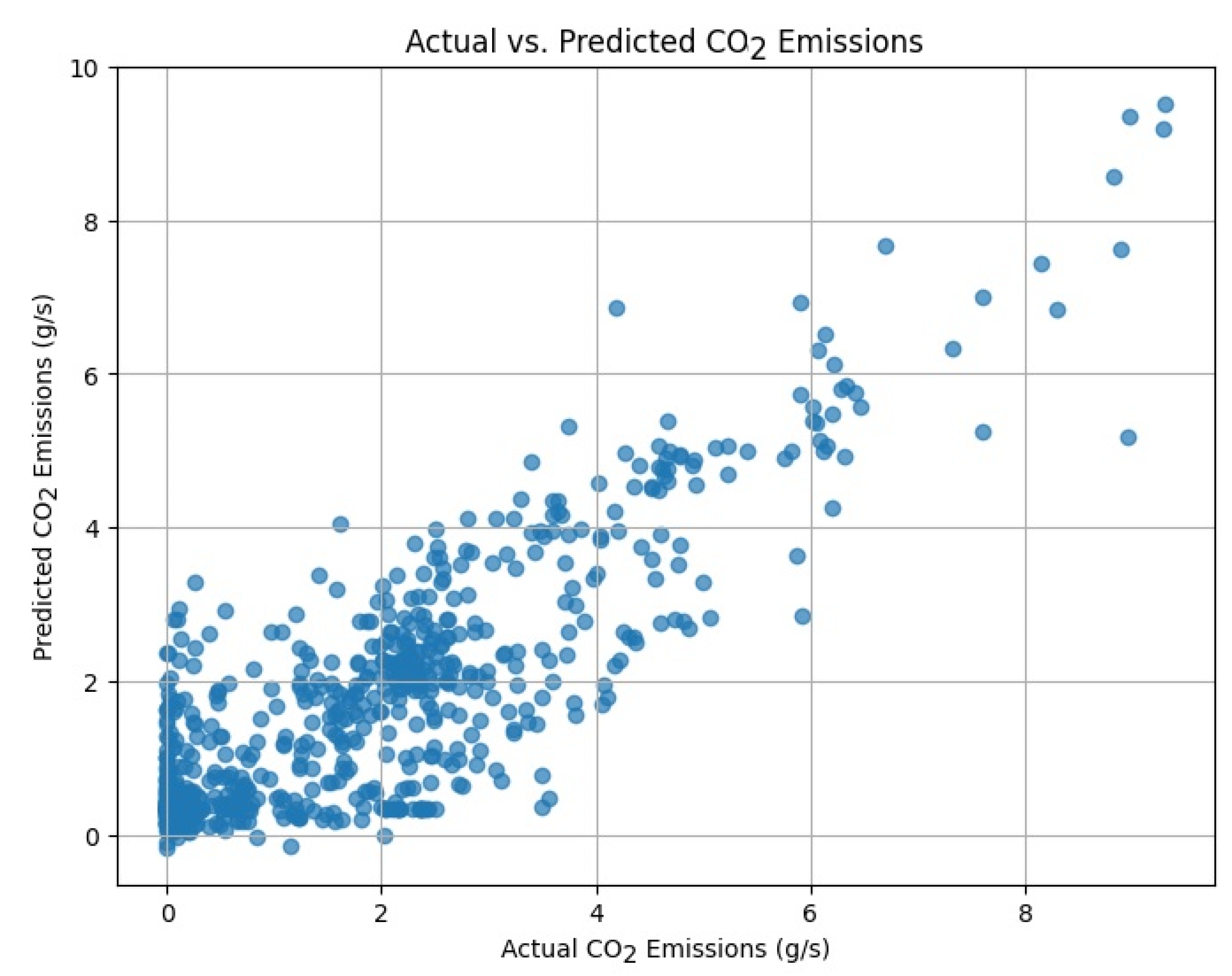
3.1. Emission Model Creation and Validation
- R2—coefficient of determination;
- —sum of squares for the model;
- —total sum of squares;
- —the actual value of the dependent variable;
- —predicted values of the dependent variable;
- —the average value of the actual dependent variable.
- —the actual value of the dependent variable;
- predicted values of the dependent variable;
- —number of observations.
3.2. Simulation Results
3.2.1. Speed Bumps
- Areas of increased vehicle emissions in the vicinity of speed bumps;
- The highest emissions are observed at the threshold where vehicles slow down to the lowest speed of 15 km/h and then proceed to accelerate to the desired speed and fluctuate around 6 g/s of CO2;
- The smallest CO2 emissions are for the threshold where vehicles slow down to 30 km/h.
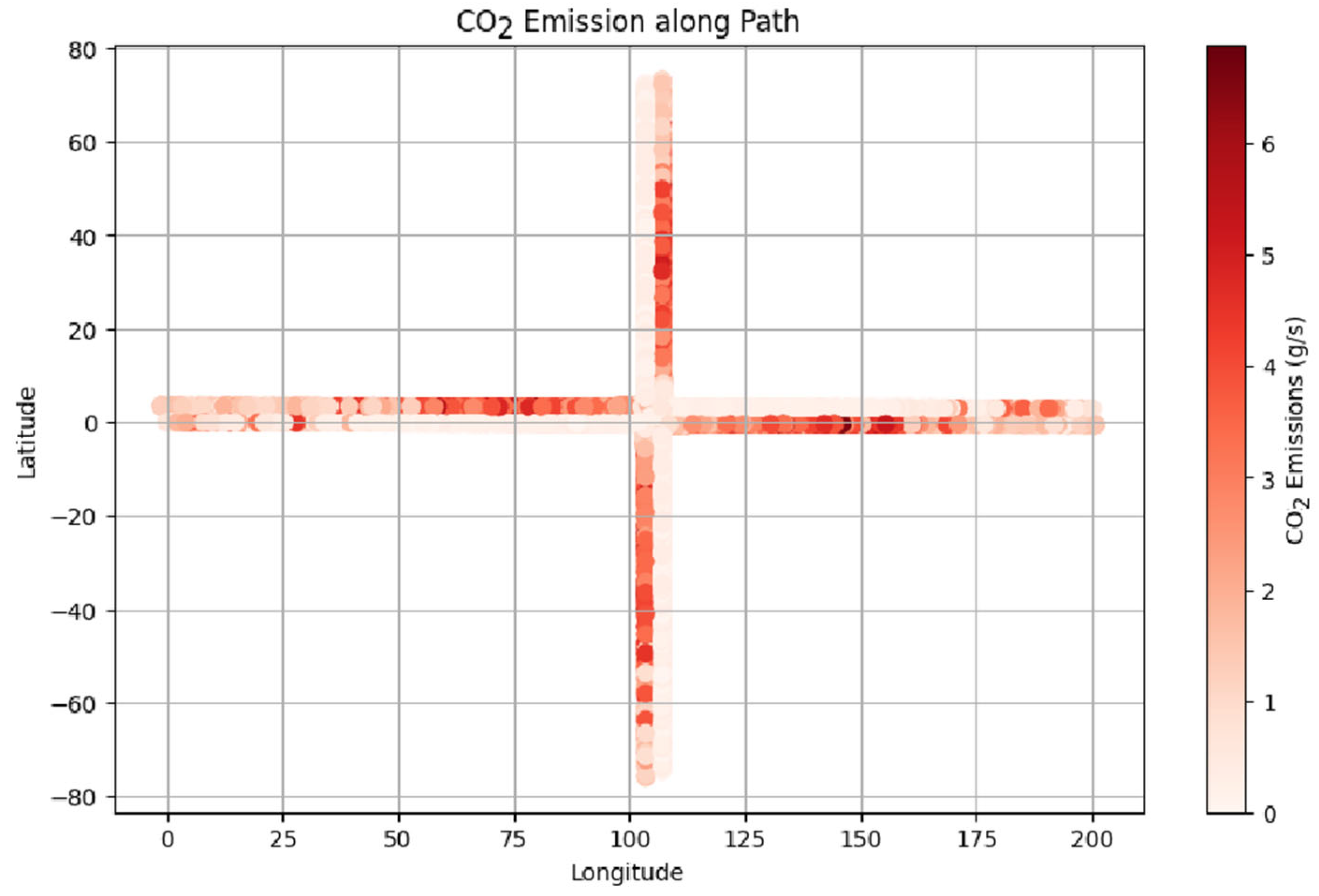
3.2.2. Raised Intersection
- For the CO2 model of the hybrid vehicle, low or zero emissions are visible for the approach roads; this is related to approaching the intersection, braking the vehicle, and switching on the electric motor;
- For exit roads, areas of increased CO2 emissions can be seen, which in places exceed 6 g/s, after driving through the elevated part of the junction;
- Based on the observation of the vehicle emission map, it is possible to look for places where these emissions are lower, making it possible to optimise the placement of pedestrian crossings to minimise the impact of exhaust fumes on the health of pedestrians.
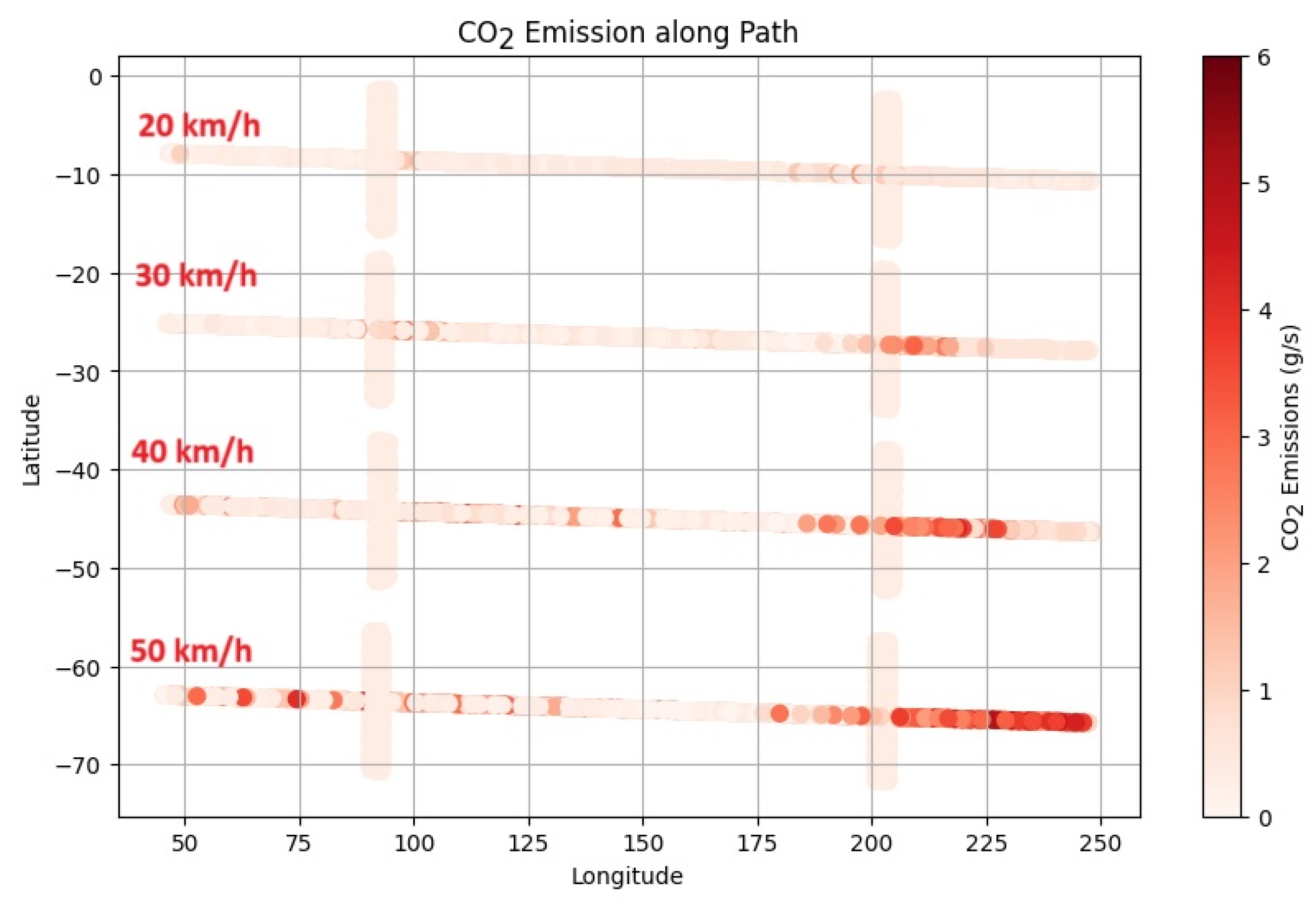
3.2.3. Speed Limits on the Road with Pedestrian Crossings
- The lowest CO2 emissions for the case of a road with a speed limit of 20 km/h is caused by the operation of the vehicle on an electric motor;
- The highest CO2 emissions for the case of a road with a speed limit of 50 km/h exceed 6 g/s in places;
- In the emission maps, it is possible to see in detail where the highest emissions accumulate, which is caused by the operation of the hybrid drive system, and where increased emissions of other exhaust components can also be observed.
4. Discussion
Recommendations
- A method that gives good results for the prediction of CO2 emissions for a hybrid vehicle where there are no regular CO2 emissions associated with the movement of the vehicle due to the switching on of the electric motor and the start-stop system is the artificial neural network method;
- The artificial neural network method gives satisfactory results for the prediction of emissions, given that the input variables for model formation and subsequent prediction of CO2 are speed V and acceleration a;
- The coefficients R2 and MSE for these explanatory variables are high, since taking the Pearson coefficient into account, these variables are approximately 0.6 for velocity V and approximately 0.19 for acceleration;
- These explanatory variables are chosen for the subsequent use of the model in traffic simulations, e.g., in Vissim—which makes the model universally applicable already at the design stage of a road solution;
- Simulations taking into account the different constraints on the speed bumps enable the selection of an appropriate speed-related speed bump design, e.g., the analysis of the selected scenarios shows that the lower the enforced speed of the speed bump, the higher the emissions (of course, the analysis of this for future work should be more extensive and take noise emissions and safety into account);
- For the increased number of hybrid vehicles, increased emissions are to be expected near the raised intersection for outgoing roads, especially near its centre; this gives an idea of the better positioning of pedestrian crossings;
- For the analysis of a speed restriction scenario for roads with pedestrian crossings in future city centres, it can be noted that the introduction of more restrictive speed limits, e.g., 30 km/h, minimises to a large extent the impact of vehicle emissions on the health of pedestrians.
5. Conclusions
- For the model studied, the R2 coefficient is 0.73, while the MSE is 0.91;
- There is a possibility to use the model for the purposes of vehicle traffic analysis with microsimulation tools;
- For the analysed scenarios of speed limits on the road, raised intersections, and speed bumps, we can observe the locations of increased emissions from hybrid vehicles, which allows, for example, the better planning of these solutions in cities.
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| CO2 | carbon dioxide |
| NOx | nitrogen oxides |
| MSE | mean square error |
| LPG | liquefied petroleum gas |
| PEMS | portable emissions measurement system |
| PM | particulate matter |
| R2 | coefficient of determination |
| sum of squares for the model | |
| total sum of squares | |
| the actual value of the dependent variable | |
| predicted values of the dependent variable | |
| the average value of the actual dependent variable |
References
- Belli, L.; Cilfone, A.; Davoli, L.; Ferrari, G.; Adorni, P.; Di Nocera, F.; Dall’Olio, A.; Pellegrini, C.; Mordacci, M.; Bertolotti, E. IoT-Enabled Smart Sustainable Cities: Challenges and Approaches. Smart Cities 2020, 3, 1039–1071. [Google Scholar] [CrossRef]
- Kharrazi, A.; Qin, H.; Zhang, Y. Urban Big Data and Sustainable Development Goals: Challenges and Opportunities. Sustainability 2016, 8, 1293. [Google Scholar] [CrossRef]
- Gabaldón Moreno, A.; Vélez, F.; Alpagut, B.; Hernández, P.; Sanz Montalvillo, C. How to Achieve Positive Energy Districts for Sustainable Cities: A Proposed Calculation Methodology. Sustainability 2021, 13, 710. [Google Scholar] [CrossRef]
- Croese, S.; Green, C.; Morgan, G. Localizing the Sustainable Development Goals Through the Lens of Urban Resilience: Lessons and Learnings from 100 Resilient Cities and Cape Town. Sustainability 2020, 12, 550. [Google Scholar] [CrossRef]
- Turoń, K.; Kubik, A.; Folęga, P.; Chen, F. Perception of Shared Electric Scooters: A Case Study from Poland. Sustainability 2023, 15, 12596. [Google Scholar] [CrossRef]
- Jung, J.; Koo, Y. Analyzing the Effects of Car Sharing Services on the Reduction of Greenhouse Gas (GHG) Emissions. Sustainability 2018, 10, 539. [Google Scholar] [CrossRef]
- Fensterer, V.; Küchenhoff, H.; Maier, V.; Wichmann, H.-E.; Breitner, S.; Peters, A.; Gu, J.; Cyrys, J. Evaluation of the Impact of Low Emission Zone and Heavy Traffic Ban in Munich (Germany) on the Reduction of PM10 in Ambient Air. Int. J. Environ. Res. Public Health 2014, 11, 5094–5112. [Google Scholar] [CrossRef]
- Lebrusán, I.; Toutouh, J. Using Smart City Tools to Evaluate the Effectiveness of a Low Emissions Zone in Spain: Madrid Central. Smart Cities 2020, 3, 456–478. [Google Scholar] [CrossRef]
- Cho, S.-H.; Chae, C.-U. A Study on Life Cycle CO2 Emissions of Low-Carbon Building in South Korea. Sustainability 2016, 8, 579. [Google Scholar] [CrossRef]
- Rizki, M.; Irawan, M.Z.; Dirgahayani, P.; Belgiawan, P.F.; Wihanesta, R. Low Emission Zone (LEZ) Expansion in Jakarta: Acceptability and Restriction Preference. Sustainability 2022, 14, 12334. [Google Scholar] [CrossRef]
- Morfeld, P.; Stern, R.; Builtjes, P.; Groneberg, D.A.; Spallek, M. Introduction of a low-emission zone and the effect on air pollutant concentration of particulate matter (PM 10)—A pilot study in Munich. Zentralblatt Arbeitsmedizin Arbeitsschutz Ergon. 2013, 63, 104–115. [Google Scholar] [CrossRef]
- Jiménez-Espada, M.; García, F.M.M.; González-Escobar, R. Citizen Perception and Ex Ante Acceptance of a Low-Emission Zone Implementation in a Medium-Sized Spanish City. Buildings 2023, 13, 249. [Google Scholar] [CrossRef]
- Mądziel, M. Vehicle Emission Models and Traffic Simulators: A Review. Energies 2023, 16, 3941. [Google Scholar] [CrossRef]
- Jaworski, A.; Mądziel, M.; Lejda, K. Creating an emission model based on portable emission measurement system for the purpose of a roundabout. Environ. Sci. Pollut. Res. 2019, 26, 21641–21654. [Google Scholar] [CrossRef]
- Perugu, H. Emission modelling of light-duty vehicles in India using the revamped VSP-based MOVES model: The case study of Hyderabad. Transp. Res. Part D Transp. Environ. 2019, 68, 150–163. [Google Scholar] [CrossRef]
- Demir, E.; Bektaş, T.; Laporte, G. A comparative analysis of several vehicle emission models for road freight transportation. Transp. Res. Part D Transp. Environ. 2011, 16, 347–357. [Google Scholar] [CrossRef]
- Smit, R.; Ntziachristos, L.; Boulter, P. Validation of road vehicle and traffic emission models–A review and meta-analysis. Atmos. Environ. 2010, 44, 2943–2953. [Google Scholar] [CrossRef]
- Beza, A.D.; Maghrour Zefreh, M.; Torok, A. Impacts of Different Types of Automated Vehicles on Traffic Flow Characteristics and Emissions: A Microscopic Traffic Simulation of Different Freeway Segments. Energies 2022, 15, 6669. [Google Scholar] [CrossRef]
- Mądziel, M.; Campisi, T. Investigation of Vehicular Pollutant Emissions at 4-Arm Intersections for the Improvement of Integrated Actions in the Sustainable Urban Mobility Plans (SUMPs). Sustainability 2023, 15, 1860. [Google Scholar] [CrossRef]
- Li, Z. Forecasting Weekly Dengue Cases by Integrating Google Earth Engine-Based Risk Predictor Generation and Google Colab-Based Deep Learning Modeling in Fortaleza and the Federal District, Brazil. Int. J. Environ. Res. Public Health 2022, 19, 13555. [Google Scholar] [CrossRef]
- Ray, S.; Alshouiliy, K.; Agrawal, D.P. Dimensionality Reduction for Human Activity Recognition Using Google Colab. Information 2021, 12, 6. [Google Scholar] [CrossRef]
- Chang, Y.-H.; Zhang, Y.-Y. Deep Learning for Clothing Style Recognition Using YOLOv5. Micromachines 2022, 13, 1678. [Google Scholar] [CrossRef] [PubMed]
- Ziemska-Osuch, M.; Osuch, D. Modeling the Assessment of Intersections with Traffic Lights and the Significance Level of the Number of Pedestrians in Microsimulation Models Based on the PTV Vissim Tool. Sustainability 2022, 14, 8945. [Google Scholar] [CrossRef]
- Chen, C.; Zhao, X.; Liu, H.; Ren, G.; Zhang, Y.; Liu, X. Assessing the Influence of Adverse Weather on Traffic Flow Characteristics Using a Driving Simulator and VISSIM. Sustainability 2019, 11, 830. [Google Scholar] [CrossRef]
- Mądziel, M.; Jaworski, A.; Savostin-Kosiak, D.; Lejda, K. The Impact of Exhaust Emission from Combustion Engines on the Environment: Modelling of Vehicle Movement at Roundabouts. Int. J. Automot. Mech. Eng. 2020, 17, 8360–8371. [Google Scholar] [CrossRef]
- Severino, A.; Pappalardo, G.; Curto, S.; Trubia, S.; Olayode, I.O. Safety Evaluation of Flower Roundabout Considering Autonomous Vehicles Operation. Sustainability 2021, 13, 10120. [Google Scholar] [CrossRef]
- Hamayel, M.J.; Owda, A.Y. A Novel Cryptocurrency Price Prediction Model Using GRU, LSTM and bi-LSTM Machine Learning Algorithms. AI 2021, 2, 477–496. [Google Scholar] [CrossRef]
- Hajigholizadeh, M.; Moncada, A.; Kent, S.; Melesse, A.M. Land–Lake Linkage and Remote Sensing Application in Water Quality Monitoring in Lake Okeechobee, Florida, USA. Land 2021, 10, 147. [Google Scholar] [CrossRef]
- Zhang, T.; Song, S.; Li, S.; Ma, L.; Pan, S.; Han, L. Research on Gas Concentration Prediction Models Based on LSTM Multidimensional Time Series. Energies 2019, 12, 161. [Google Scholar] [CrossRef]
- Celaya-Padilla, J.M.; Galván-Tejada, C.E.; López-Monteagudo, F.E.; Alonso-González, O.; Moreno-Báez, A.; Martínez-Torteya, A.; Galván-Tejada, J.I.; Arceo-Olague, J.G.; Luna-García, H.; Gamboa-Rosales, H. Speed Bump Detection Using Accelerometric Features: A Genetic Algorithm Approach. Sensors 2018, 18, 443. [Google Scholar] [CrossRef]
- Kim, D.; Jeong, M.; Bae, B.; Ahn, C. Design of a Human Evaluator Model for the Ride Comfort of Vehicle on a Speed Bump Using a Neural Artistic Style Extraction. Sensors 2019, 19, 5407. [Google Scholar] [CrossRef] [PubMed]
- Pirisi, A.; Grimaccia, F.; Mussetta, M.; Zich, R.E. Novel Speed Bumps Design and Optimization for Vehicles’ Energy Recovery in Smart Cities. Energies 2012, 5, 4624–4642. [Google Scholar] [CrossRef]
- Lawrence, B.; Fildes, B.; Cairney, P.; Davy, S.; Sobhani, A. Evaluation of Raised Safety Platforms (RSP) On-Road Safety Performance. Sustainability 2022, 14, 138. [Google Scholar] [CrossRef]
- Pérez-Acebo, H.; Ziółkowski, R.; Linares-Unamunzaga, A.; Gonzalo-Orden, H. A Series of Vertical Deflections, a Promising Traffic Calming Measure: Analysis and Recommendations for Spacing. Appl. Sci. 2020, 10, 3368. [Google Scholar] [CrossRef]
- Psaraftis, H.N. Speed Optimization vs. Speed Reduction: The Choice between Speed Limits and a Bunker Levy. Sustainability 2019, 11, 2249. [Google Scholar] [CrossRef]
- Gámez Serna, C.; Ruichek, Y. Dynamic Speed Adaptation for Path Tracking Based on Curvature Information and Speed Limits. Sensors 2017, 17, 1383. [Google Scholar] [CrossRef]
- Mądziel, M.; Jaworski, A.; Kuszewski, H.; Woś, P.; Campisi, T.; Lew, K. The Development of CO2 Instantaneous Emission Model of Full Hybrid Vehicle with the Use of Machine Learning Techniques. Energies 2022, 15, 142. [Google Scholar] [CrossRef]
- Doucette, R.T.; McCulloch, M.D. Modeling the prospects of plug-in hybrid electric vehicles to reduce CO2 emissions. Appl. Energy 2011, 88, 2315–2323. [Google Scholar] [CrossRef]
- Mądziel, M. Liquified Petroleum Gas-Fuelled Vehicle CO2 Emission Modelling Based on Portable Emission Measurement System, On-Board Diagnostics Data, and Gradient-Boosting Machine Learning. Energies 2023, 16, 2754. [Google Scholar] [CrossRef]
- Tena-Gago, D.; Golcarenarenji, G.; Martinez-Alpiste, I.; Wang, Q.; Alcaraz-Calero, J.M. Machine-Learning-Based Carbon Dioxide Concentration Prediction for Hybrid Vehicles. Sensors 2023, 23, 1350. [Google Scholar] [CrossRef]
- Nocera, S.; Basso, M.; Cavallaro, F. Micro and Macro modelling approaches for the evaluation of the carbon impacts of transportation. Transp. Res. Procedia 2017, 24, 146–154. [Google Scholar] [CrossRef]
- Wang, W.; Xu, X.; Jiang, Y.; Xu, Y.; Cao, Z.; Liu, S. Integrated scheduling of intermodal transportation with seaborne arrival uncertainty and carbon emission. Transp. Res. Part D Transp. Environ. 2020, 88, 102571. [Google Scholar] [CrossRef]
- Wang, Y.; Gan, S.; Li, K.; Chen, Y. Planning for low-carbon energy-transportation system at metropolitan scale: A case study of Beijing, China. Energy 2022, 246, 123181. [Google Scholar] [CrossRef]
- Aziz, H.A.; Ukkusuri, S.V.; Romero, J. Understanding short-term travel behavior under personal mobility credit allowance scheme using experimental economics. Transp. Res. Part D Transp. Environ. 2015, 36, 121–137. [Google Scholar] [CrossRef]
- Choi, A.S.; Gössling, S.; Ritchie, B.W. Flying with climate liability? Economic valuation of voluntary carbon offsets using forced choices. Transp. Res. Part D Transp. Environ. 2018, 62, 225–235. [Google Scholar] [CrossRef]
- Libardo, A.; Nocera, S. Transportation elasticity for the analysis of Italian transportation demand on a regional scale. Traffic Eng. Control. 2008, 49, 187–192. [Google Scholar]
- Jia, L.; Cheng, P.; Yu, Y.; Chen, S.H.; Wang, C.X.; He, L.; Fan, B.G.; Jin, Y. Regeneration mechanism of a novel high-performance biochar mercury adsorbent directionally modified by multimetal multilayer loading. J. Environ. Manag. 2023, 326, 116790. [Google Scholar] [CrossRef]
- Roy, M.; Ghoddusi, H.; Trancik, J.E. Evaluating low-carbon transportation technologies when demand responds to price. Environ. Sci. Technol. 2022, 56, 2096–2106. [Google Scholar] [CrossRef]
- Bakker, S.; Konings, R. The transition to zero-emission buses in public transport–The need for institutional innovation. Transp. Res. Part D Transp. Environ. 2018, 64, 204–215. [Google Scholar] [CrossRef]
- Al-Thani, H.; Koç, M.; Isaifan, R.J.; Bicer, Y. A Review of the Integrated Renewable Energy Systems for Sustainable Urban Mobility. Sustainability 2022, 14, 10517. [Google Scholar] [CrossRef]
- Nocera, S.; Tonin, S. A joint probability density function for reducing the uncertainty of marginal social cost of carbon evaluation in transport planning. Comput. -Based Model. Optim. Transp. 2014, 262, 113–126. [Google Scholar]
- Wang, L.; Zhang, Y.; Yin, C.; Zhang, H.; Wang, C. Hardware-in-the-loop simulation for the design and verification of the control system of a series–parallel hybrid electric city-bus. Simul. Model. Pract. Theory 2012, 25, 148–162. [Google Scholar] [CrossRef]
- Poullikkas, A. Sustainable options for electric vehicle technologies. Renew. Sustain. Energy Rev. 2015, 41, 1277–1287. [Google Scholar] [CrossRef]
- Sandrini, G.; Chindamo, D.; Gadola, M. Regenerative Braking Logic That Maximizes Energy Recovery Ensuring the Vehicle Stability. Energies 2022, 15, 5846. [Google Scholar] [CrossRef]
- Gao, W. Performance comparison of a fuel cell-battery hybrid powertrain and a fuel cell-ultracapacitor hybrid powertrain. IEEE Trans. Veh. Technol. 2005, 54, 846–855. [Google Scholar] [CrossRef]
- Sandrini, G.; Gadola, M.; Chindamo, D.; Zecchi, L. Model of a Hybrid Electric Vehicle Equipped with Solid Oxide Fuel Cells Powered by Biomethane. Energies 2023, 16, 4918. [Google Scholar] [CrossRef]
- Bao, Y.; Mehmood, K.; Yaseen, M.; Dahlawi, S.; Abrar, M.M.; Khan, M.A.; Saud, S.; Dawar, K.; Fahad, S.; Faraj, T.K. Global research on the air quality status in response to the electrification of vehicles. Sci. Total Environ. 2021, 795, 148861. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year of manufacture | 2020 |
| Engine type | Hybrid |
| Engine capacity | 1497 cm3 |
| Internal combustion engine: power | 67 kW |
| Internal combustion engine: maximum torque | 111 Nm 3600–4400 RPM |
| Ignition | Spark |
| Electric motor type | Permanent magnet electric motor |
| Electric motor: power | 59 kW |
| Electric motor: maximum torque | 169 Nm |
| Exhaust after-treatment system | Three-way catalytic converter (TWC) |
| Exhaust emissions standard | Euro 6d |
| Traction battery | Nickel-hydride |
| Fuel tank capacity | 36 L |
| Unladen mass | min. 1085/max. 1095 kg |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mądziel, M. Future Cities Carbon Emission Models: Hybrid Vehicle Emission Modelling for Low-Emission Zones. Energies 2023, 16, 6928. https://doi.org/10.3390/en16196928
Mądziel M. Future Cities Carbon Emission Models: Hybrid Vehicle Emission Modelling for Low-Emission Zones. Energies. 2023; 16(19):6928. https://doi.org/10.3390/en16196928
Chicago/Turabian StyleMądziel, Maksymilian. 2023. "Future Cities Carbon Emission Models: Hybrid Vehicle Emission Modelling for Low-Emission Zones" Energies 16, no. 19: 6928. https://doi.org/10.3390/en16196928
APA StyleMądziel, M. (2023). Future Cities Carbon Emission Models: Hybrid Vehicle Emission Modelling for Low-Emission Zones. Energies, 16(19), 6928. https://doi.org/10.3390/en16196928