1. Introduction
Aircraft landing gear is a critical subsystem of the aircraft, as it provides a suspension system for landing, take-off, and taxiing. The landing gear also plays an important role in providing passenger comfort and ensuring a smooth and seamless landing and take-off. It does this by absorbing and reducing the transmitted vibrations and kinetic energy of the landing impact [
1]. However, designing a high-performance landing gear resistant to uncertainties and landing vibrations is a challenge that engineers continue to face. An aircraft landing gear system must be able to reduce the vibrations and kinetic energy that result from the landing impact of an aircraft over an uneven runway surface. It must also provide passenger comfort and reduce the fatigue of the aircraft’s airframe [
1]. Ideally, an aircraft landing gear should follow its desired path regardless of landing vibrations or uncertain disturbances (e.g., an uneven runway or parametric variations). Landing gears can be classified into three types: passive, semi-active, and active landing gear [
2]. Passive landing gear systems are incapable of adjusting their landing performance or parameters. They obtain optimization only once, and the aircraft technicians are tasked with constantly checking the landing gear to make sure it is in good condition [
2]. Semi-active landing gear systems are equipped with dampers, and they achieve control by adjusting the behavior of the viscous friction of the dampers. Active landing gear systems usually have an electrohydraulic damping system capable of producing the external force needed to control landing vibrations and improve the overall quality and performance of the landing gear instantaneously [
2]. Generally, passive landing gear systems have a rigid damping system, while active landing gear systems have a more flexible damping system. The first active landing gear system was proposed by Irving Ross and Ralph Edson in 1982 [
3]. Since then, there has been a growing interest in the application and control of active landing gear systems. While passive and semi-active control systems have their advantages, this paper will focus on active landing gear systems, as various studies, including [
4,
5,
6,
7,
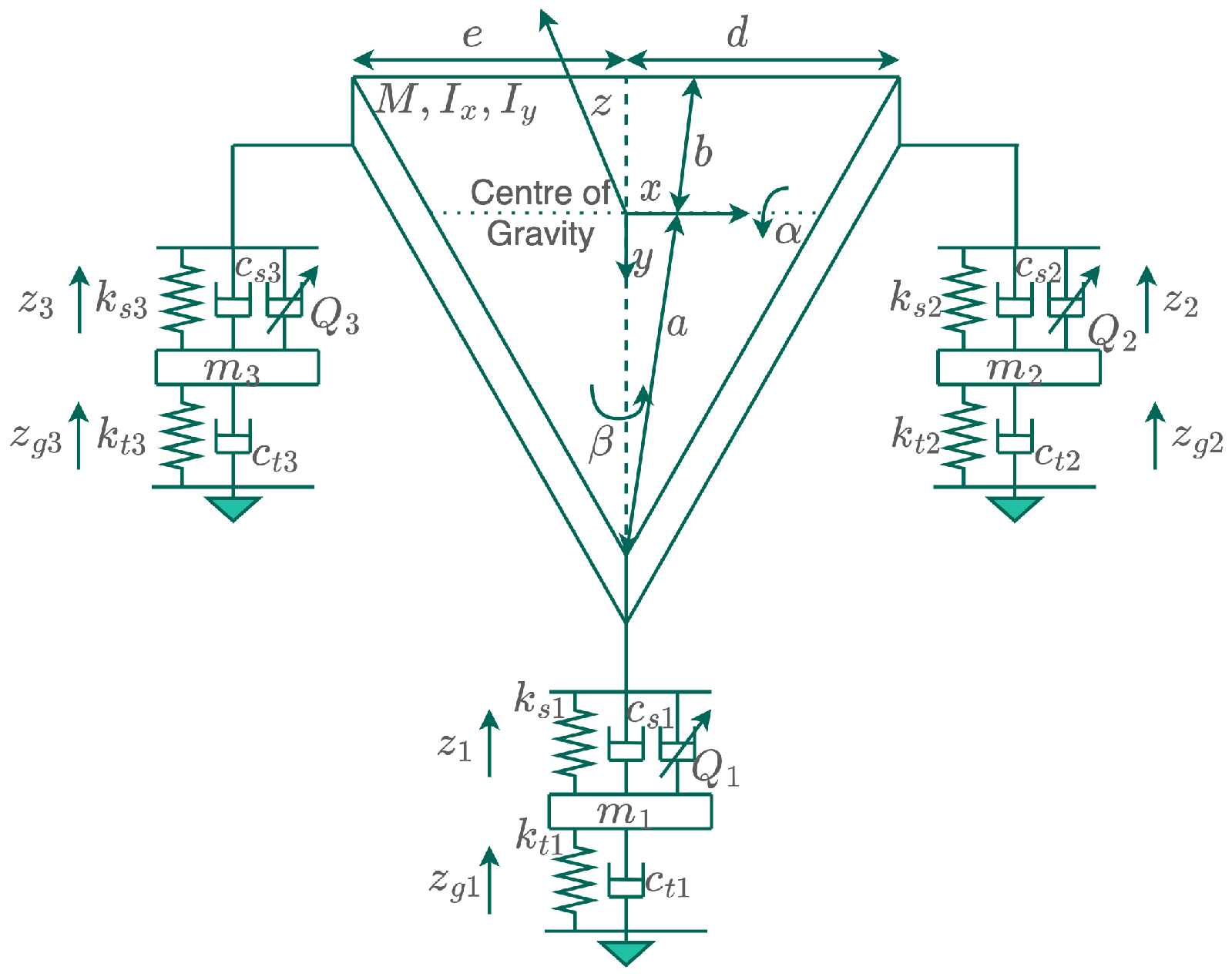
8], have shown that active landing gear systems are experimentally better when it comes to reducing aircraft landing vibrations. The active landing gear system in this paper has six degrees of freedom that dictate the system’s motion. These degrees of freedom are the aircraft’s bounce motion,
z, the aircraft’s pitch motion,
, the aircraft’s roll motion,
, the vertical displacement of the aircraft’s nose,
, the vertical displacement of the aircraft’s left main landing gear,
, and the vertical displacement of the aircraft’s right main landing gear,
.
Alongside the various studies on the dynamics of the landing gear system, like the one carried out in [
9], there has also been various research on the control of active landing gear systems. In [
10], the authors proposed the active control of a landing gear system using a PID controller, and they tuned the controller’s coefficient using the Ziegler–Nichols tuning method. However, the authors were faced with the issue of insufficient parameters needed to deal with overshooting, settling time, etc. These made the PID control too weak to control the system in the presence of larger uncertainties. Similarly, ref. [
11] proposed the use of the PID controller of optimization to control a landing gear system. Other research in [
12,
13] also made use of PID control for an active landing gear system, but in this case, the authors used the Bees Intelligent Algorithm as the optimization technique for modeling the landing gear system.
Ref. [
14] proposed an impedance fuzzy control of the active landing gear system. This fuzzy control had three interior loops that controlled the force, body, and position of the aircraft. The inner loop was responsible for controlling the actuator force by a PI controller, the middle loop used a PD-like fuzzy controller to control the position of the aircraft’s body, and the outer loop was the impedance control loop. However, this control strategy lacked the robustness needed to control the landing gear system in the presence of uncertainties. In [
15], a landing gear system with an oleo-pneumatic shock absorber was also controlled using the fuzzy control strategy. However, the authors completely ignored the effect of signal and measurement delays in their simulation, thereby limiting the abilities of the control strategy. The authors in [
2] proposed the use of a robust nonlinear control system to control an active landing gear. The control system has two interior loops for displacement and force control, and the Lyapunov direct method is used for the asymptotic stability analysis of the control strategy. However, this research work is unnecessarily complex and, as a result, slows down the system. By using a hydraulic supply controlled electronically by servo valves, the authors in [
16] controlled a Navy A-6 intruder landing gear. A mechanical admittance approach with two loops was developed in [
17] to control a 6-DOF active landing gear system. One loop generated an appropriate trajectory path for the aircraft’s body displacement, and the other loop used PD control to track the generated trajectory. In [
1], a Linear Quadratic Regulator (LQR) technique was proposed for the control of an active landing gear system. As a PI-based optimal control technique, the LQR control strategy provided practical feedback gains for the system. However, their research falls short of adequately testing the performance of the controller under various uncertainties and disturbances. The LQR control technique was also combined with an
controller to create a magnetorheological damper in [
18]. However, since this design was for semi-active control of a landing gear system, it falls short of efficiently minimizing landing vibrations.
Unlike the existing literature, this paper aims at controlling a 6-DOF aircraft landing gear by combining the LQR control technique with a Kalman filter to propose the Linear Quadratic Gaussian (LQG) control technique. By doing that, this paper presents a novel and innovative approach, as this is one of the first attempts at applying an LQG controller on the 6-DOF aircraft landing gear system. By leveraging the LQG controller’s estimating control abilities, this paper not only optimizes the system’s control but also estimates uncertain variables, resulting in improved landing impact, passenger comfort, and aircraft handling. The research work in this paper represents a significant advancement in the field of aircraft control, providing a more robust and comprehensive approach to the control of landing gear systems. The rest of this paper is organized as follows.
Section 2 describes the mathematical and the state space model of the 6-DOF aircraft landing gear, and in
Section 3, the mathematical model of the optimal control strategy is outlined. The performance of the LQG controller on the 6-DOF aircraft landing is tested, and the results are discussed in
Section 4. The authors’ concluding remarks and suggestions for future works are contained in
Section 5.
4. Results and Discussion
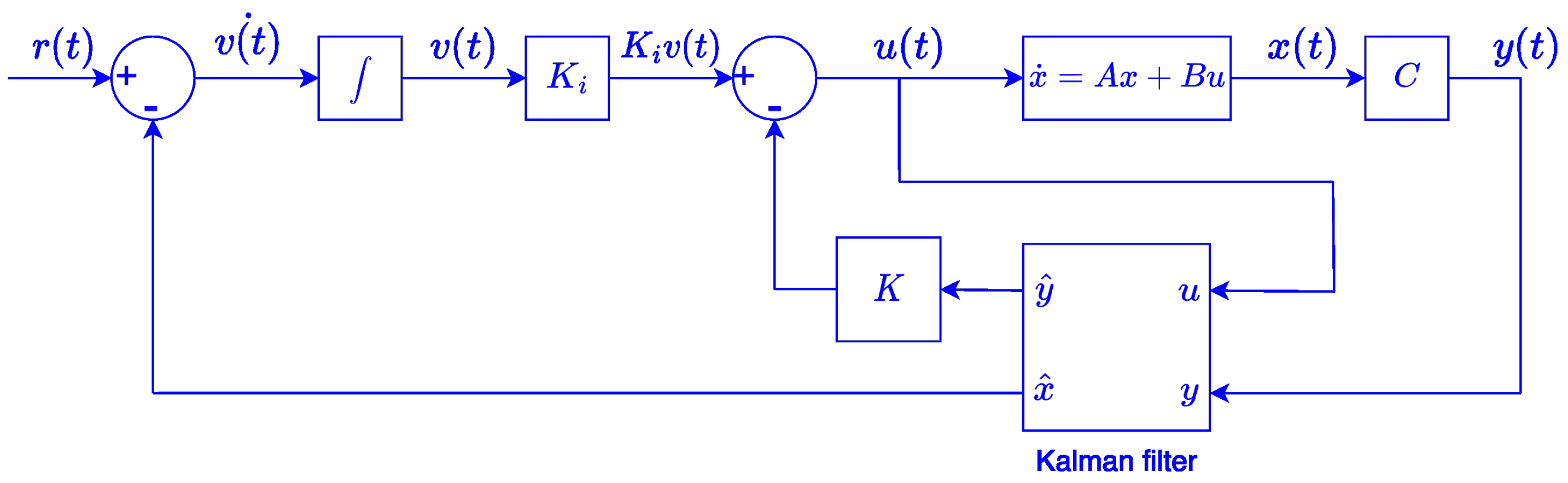
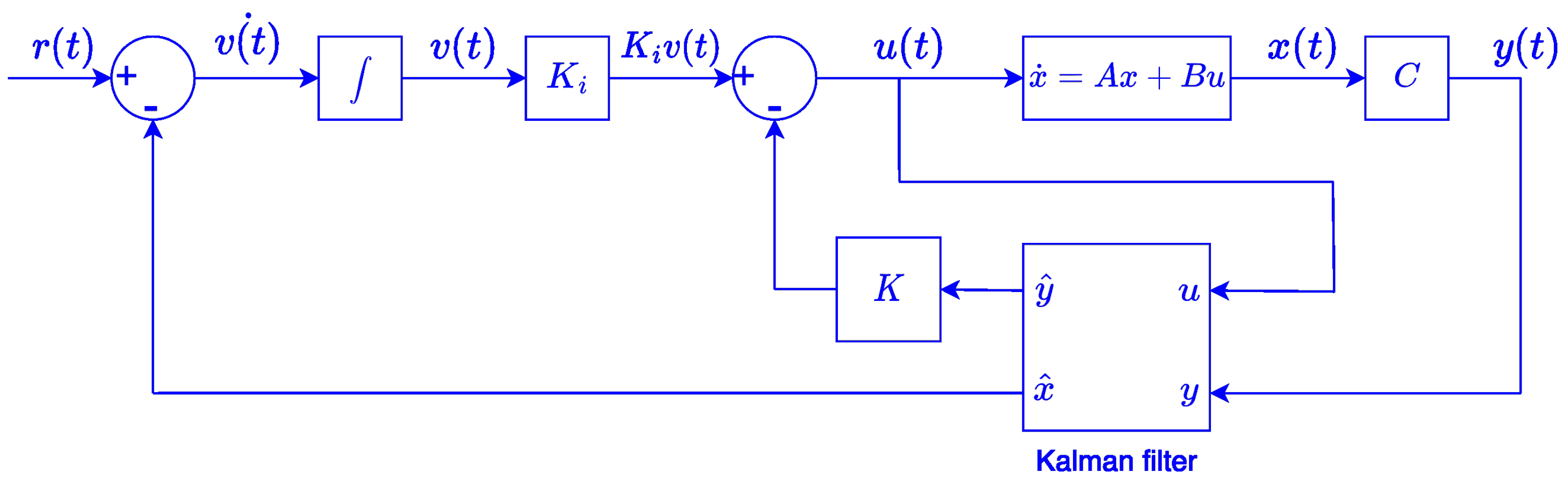
The performance of the LQG controller on the 6-DOF aircraft landing gear is tested and simulated using MATLAB/Simulink. The block diagram of the LQG optimal controller presented in
Figure 3 is used as a modeling approach, which describes the used approach to create the simulation model. The presented six steps highlight the LQG controller of the landing gear system implementation, which also breaks down the system into its constituent components and explains how each component is represented in the model. In addition,
Section 3, Optimal Control Technique, provides the fundamental equations that govern the behavior of each component in the model. The parameters used to assess the landing gear system are shown in
Table 1, and they are obtained from a Fokker aircraft. The goal of applying the controller on the landing gear system is to reduce the landing vibrations of the system and provide passenger comfort on the aircraft despite human-induced or natural disturbances. Therefore, the landing gear has to follow the desired trajectory path as closely as possible, regardless of the uncertainties it faces. For this testing purpose, the desired reference trajectory is a step response of a first-order system with an initial value of 0 and a final value of 1, where
s. The system’s response to the reference trajectory is analyzed using the system’s six degrees of freedom,
z,
,
,
,
, and
, as well as their tracking errors and control signals.
Firstly, the LQG controller is tested under nonzero initial conditions with a value of 0.5 rad. After the system attains stability from the nonzero initial condition, the
,
,
z,
,
, and
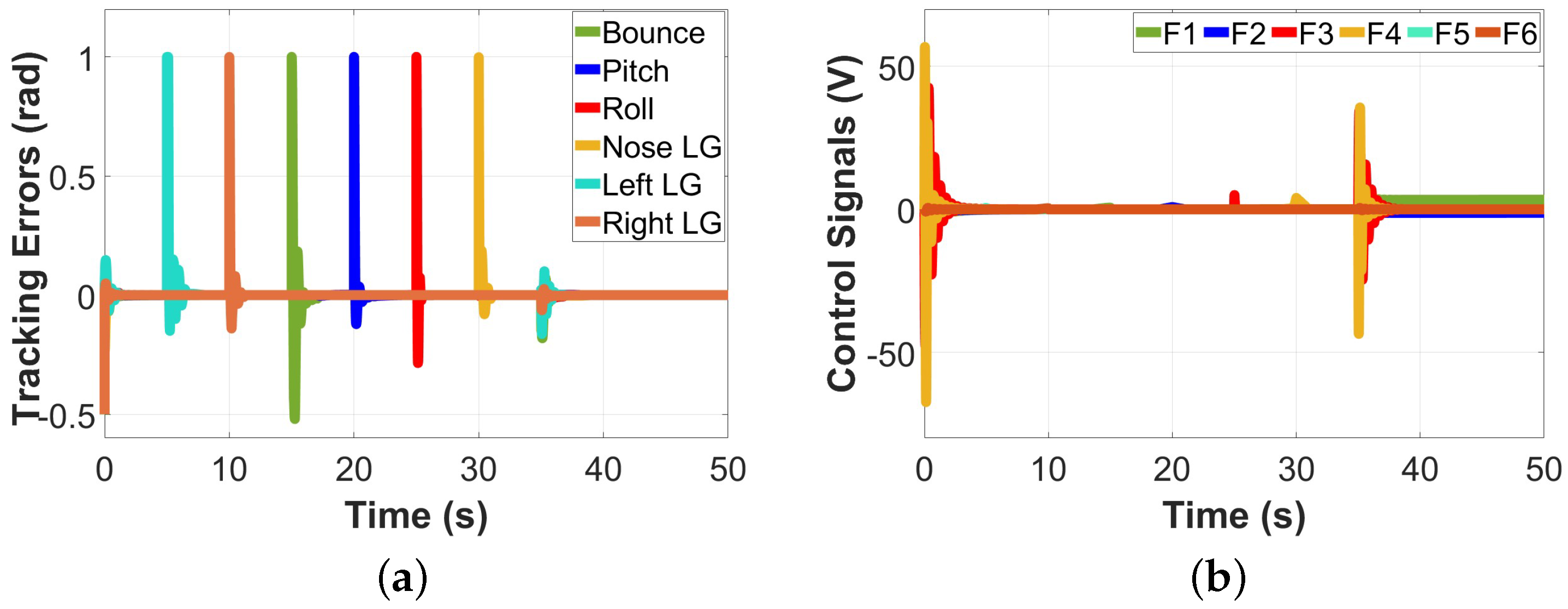
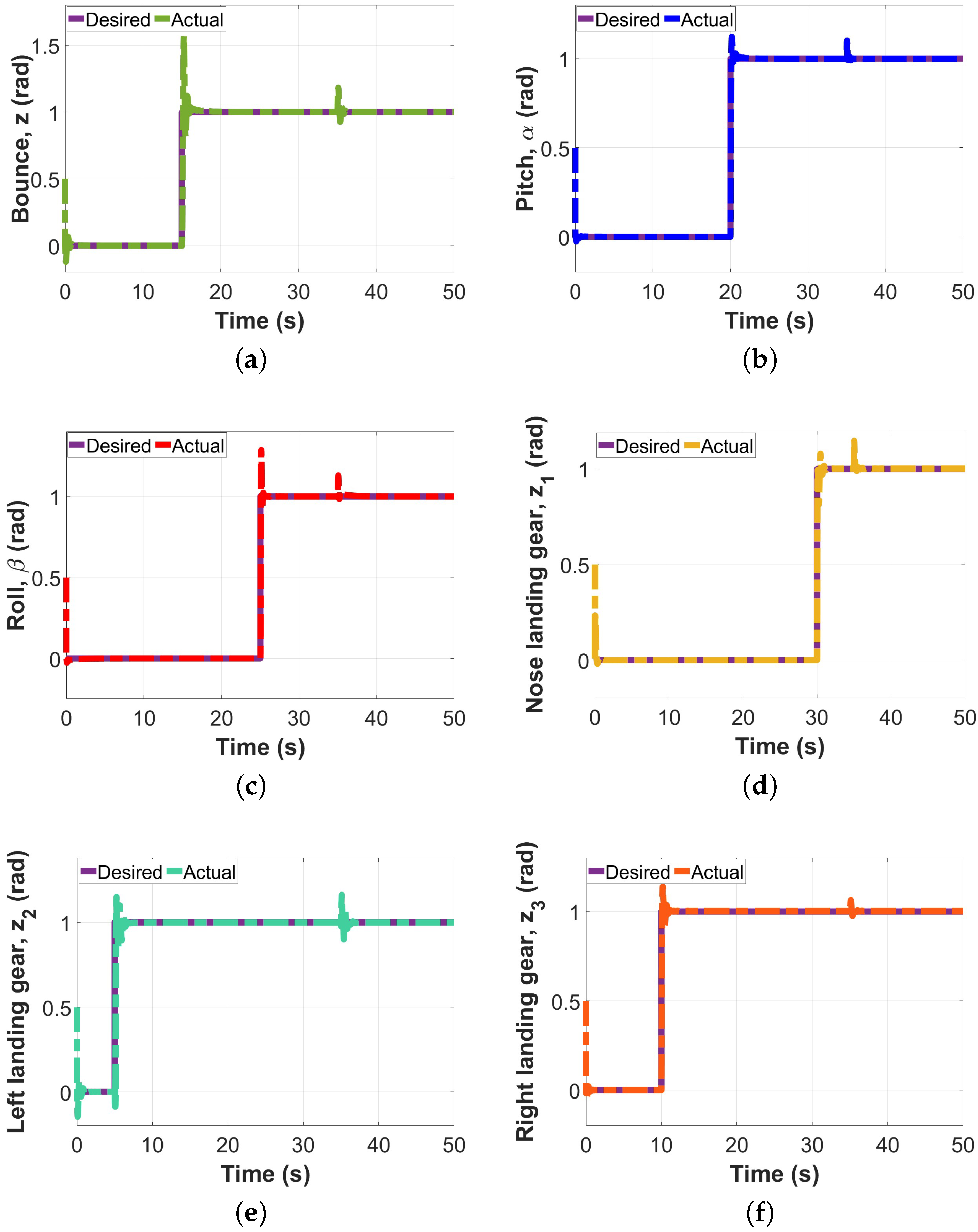
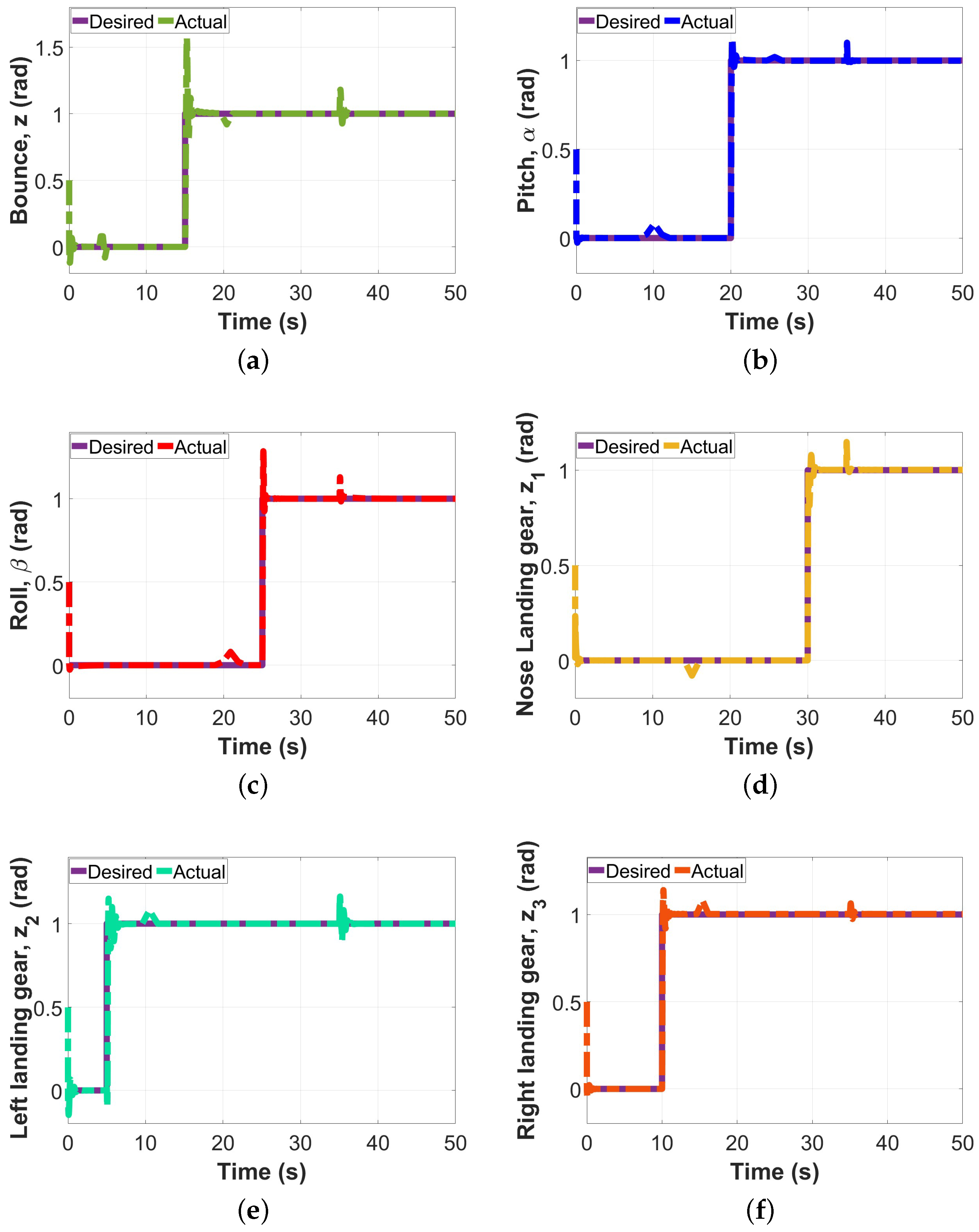
motions are subjected to a step change at 5 s, 10 s, 15 s, 20 s, 25 s, and 30 s, respectively. As unexpected disturbances are a part of the uncertainties that the landing gear is bound to face in the real world, a simulated disturbance at 35 s is also applied to the system to assess the performance of the controller. This disturbance is applied to all six motions. By doing this, the LQG controller’s performance on the landing gear under nonzero initial conditions, nominal scenarios, and unexpected disturbances is assessed. The results obtained from the simulations are shown in
Figure 4 and
Figure 5. The first three seconds of each graph in
Figure 4 show the system’s response to nonzero initial conditions. From the results, it can be noted that despite the nonzero initial condition, the controller was able to converge to the desired path in very little time, thereby showing that nonzero initial conditions have little to no effect on it. Once the system becomes stable, it continues in the nominal state until 35 s. In this nominal state, the controller follows the desired trajectory path closely and only has a slight overshoot when the step changes occur. However, despite the step changes, the controller is still able to converge the system to its desired path in less than 2 s, thereby maintaining the system’s stability. The controller also performs excellently in the presence of an unexpected disturbance at 35 s, as it has a slight overshoot for less than a second and converges to the desired path. The tracking errors obtained in
Figure 5 also show that despite the nonzero initial conditions, the step changes, and uncertain disturbances, the controller is able to decay all errors to zero, maintaining a stable landing gear system. The result of the control signals of the system is shown in
Figure 5 with a slight undershoot response to the nonzero initial condition and a slight overshoot at the step changes and unexpected disturbance. However, despite these testing conditions, the controller is successful at bringing the control signal to its desired path.
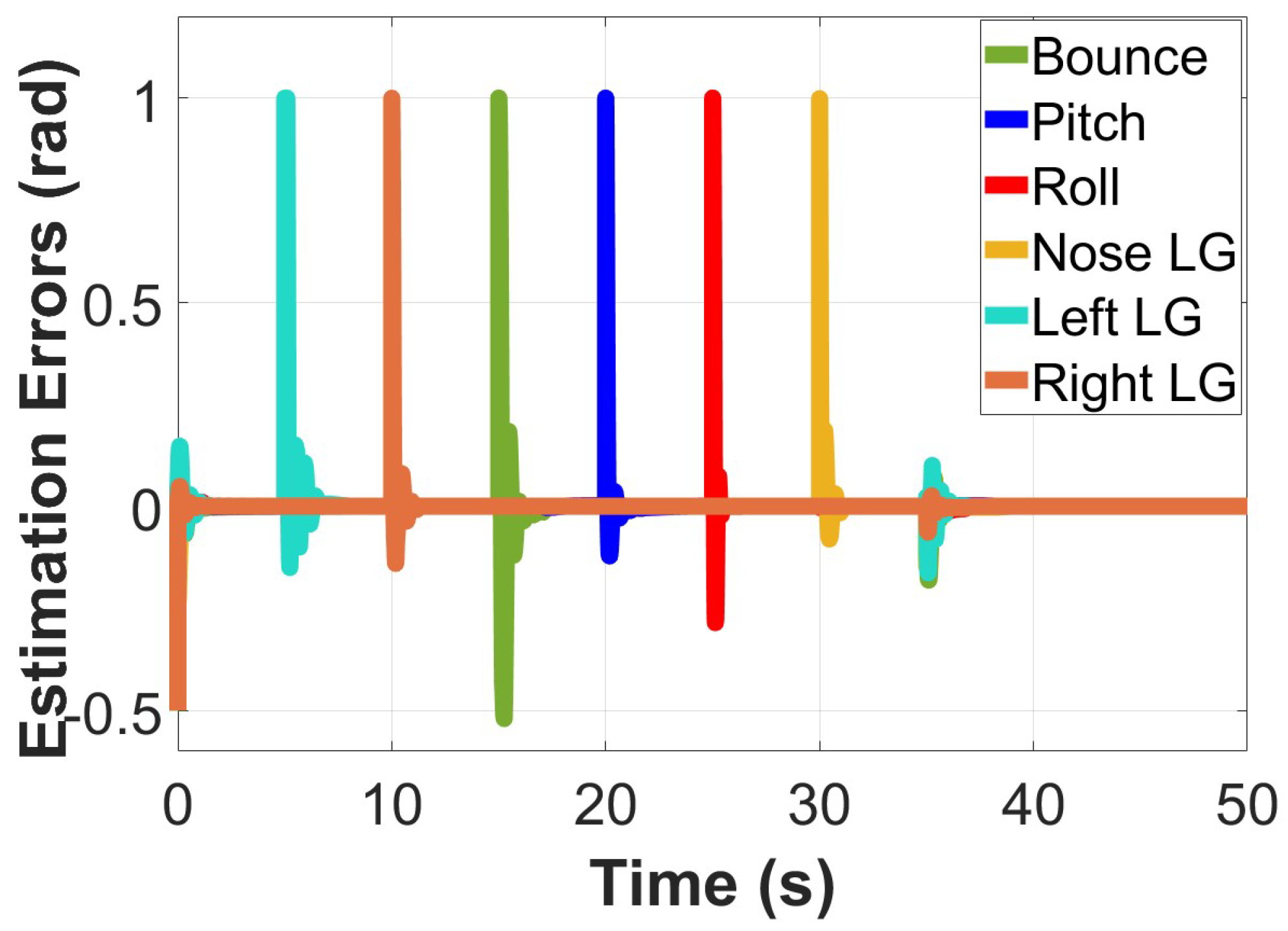
Since the LQG controller also acts as an estimator through the Kalman filter, the estimation performance of the filter has to be tested as well. As such, the Kalman estimator is assessed under the same testing conditions, and the results are shown in
Figure 6.
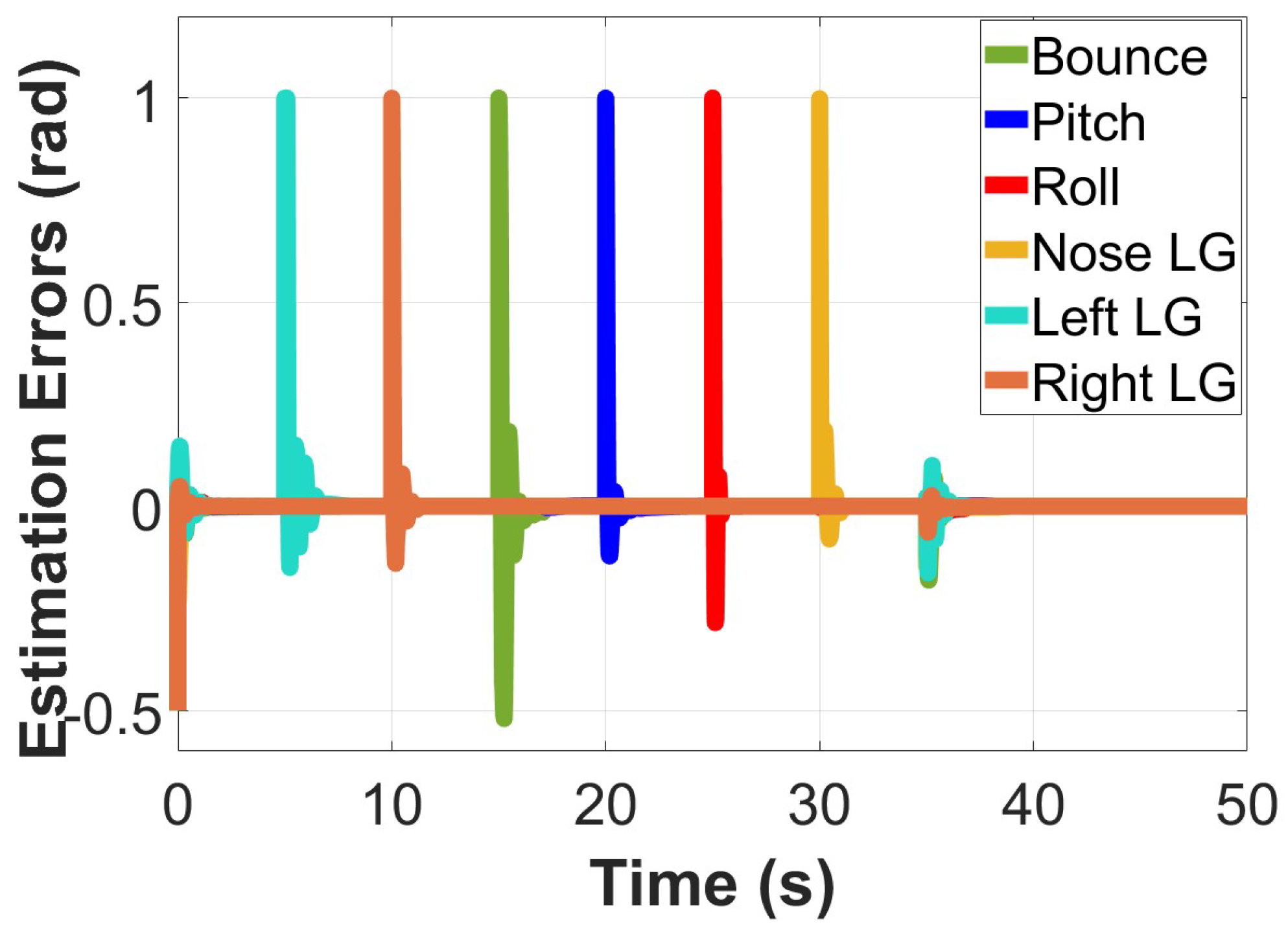
Figure 6 shows the Kalman filter estimate output for all six degrees of freedom. The results show the controller’s estimated response to the testing conditions applied. Despite these testing conditions, the controller optimally estimated the system’s state while following the trajectory path closely. The estimation error is also shown in
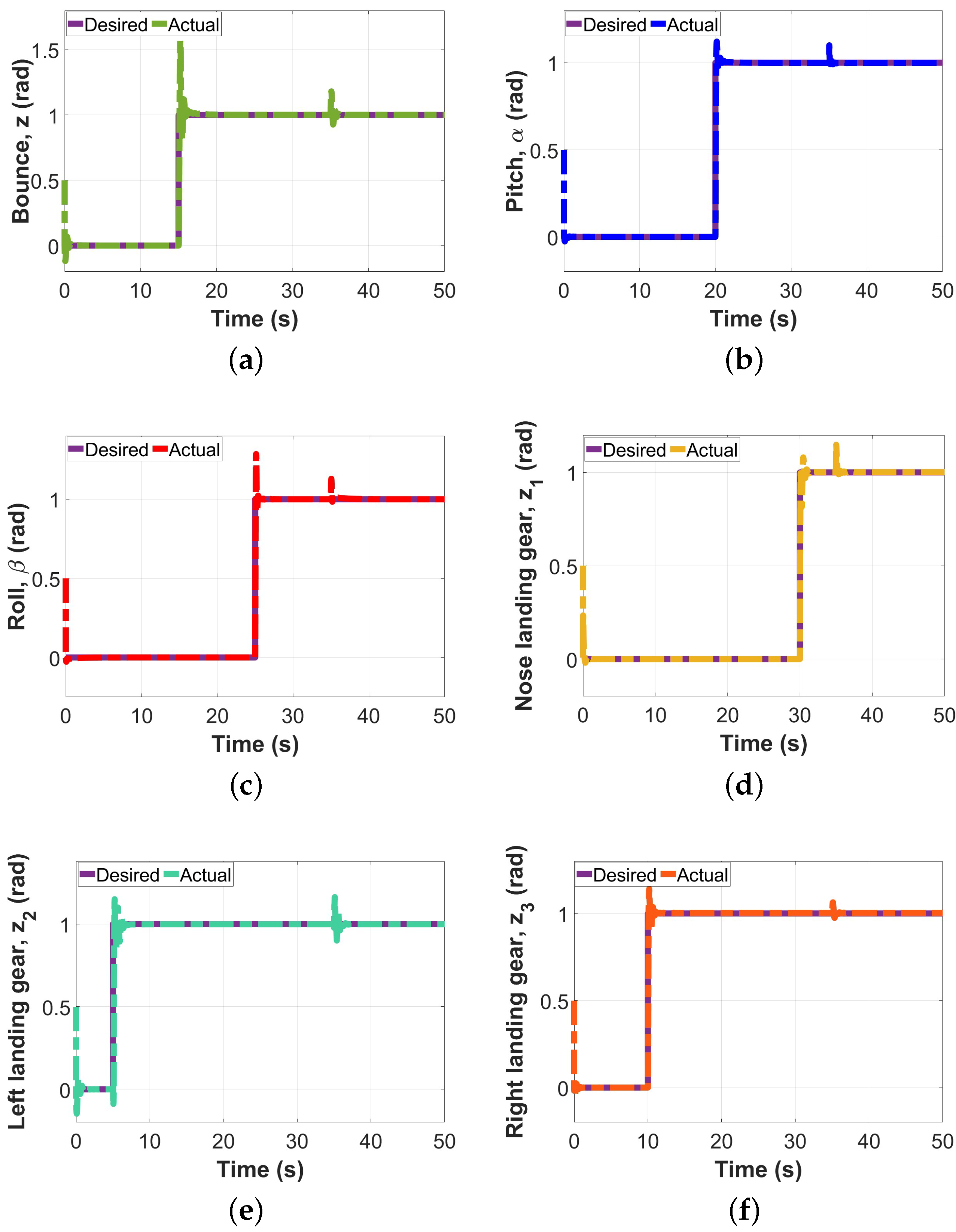
Figure 7, and the controller does an excellent job of decaying all estimation errors to zero and maintaining the system’s stability. After that, the controller is compared to a PID controller, an equally simple strategy. The PID controller is tested on the landing gear system under the same testing conditions, and the results are shown in
Figure 8 and
Figure 9.
Just like the LQG controller, the first three seconds show the response of the PID controller under nonzero initial conditions; the nominal case is shown from 5 s to 35 s, and at 35 s, the controller’s response to unexpected disturbances is shown. As can be seen in the results, the PID controller does not follow the trajectory path as closely as the LQG controller does. The PID controller also takes a longer time than the LQG controller to decay its tracking errors to zero. The control signals of the PID controller shown in
Figure 9b also do not converge to zero as easily as those of the LQG controller.
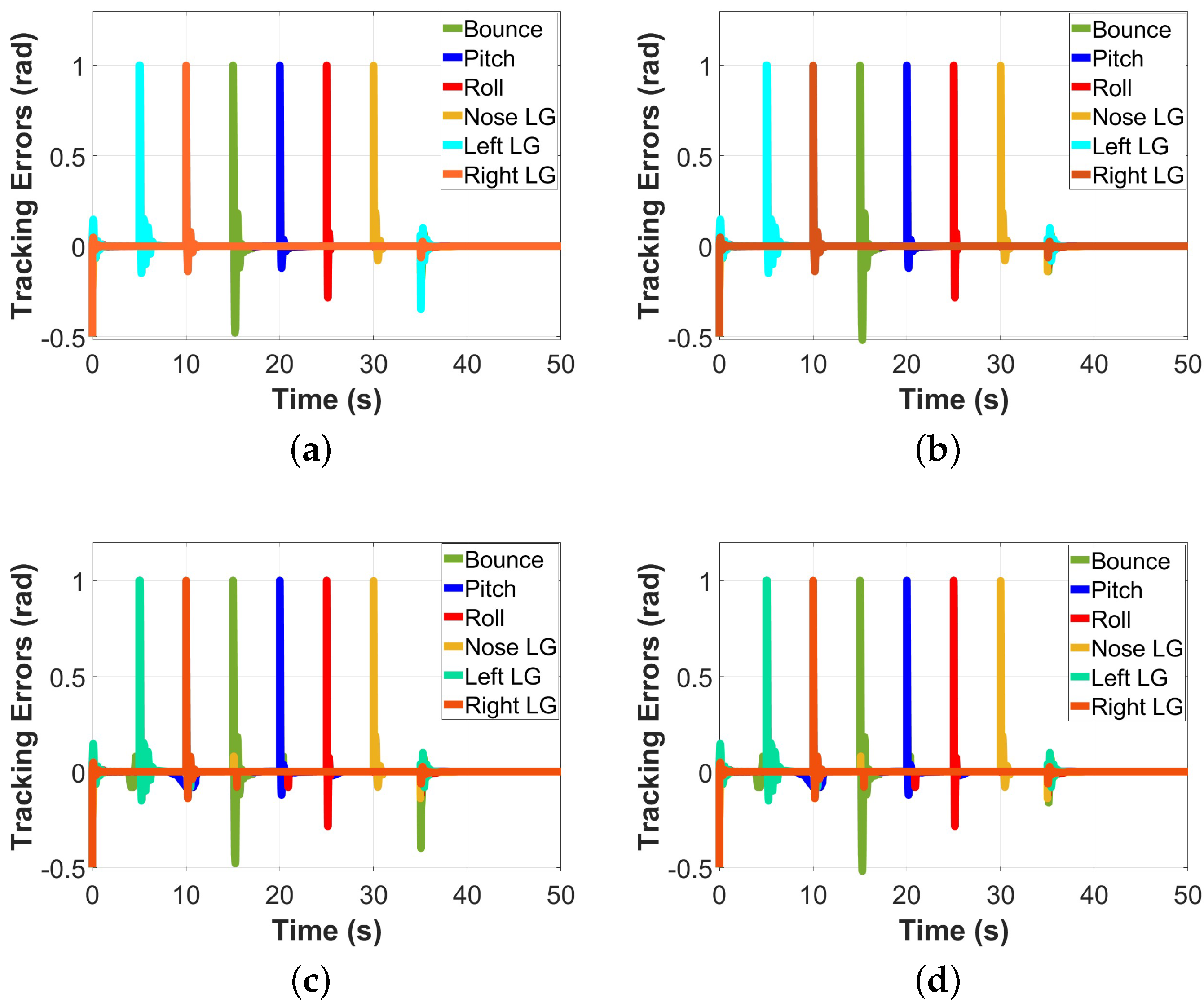
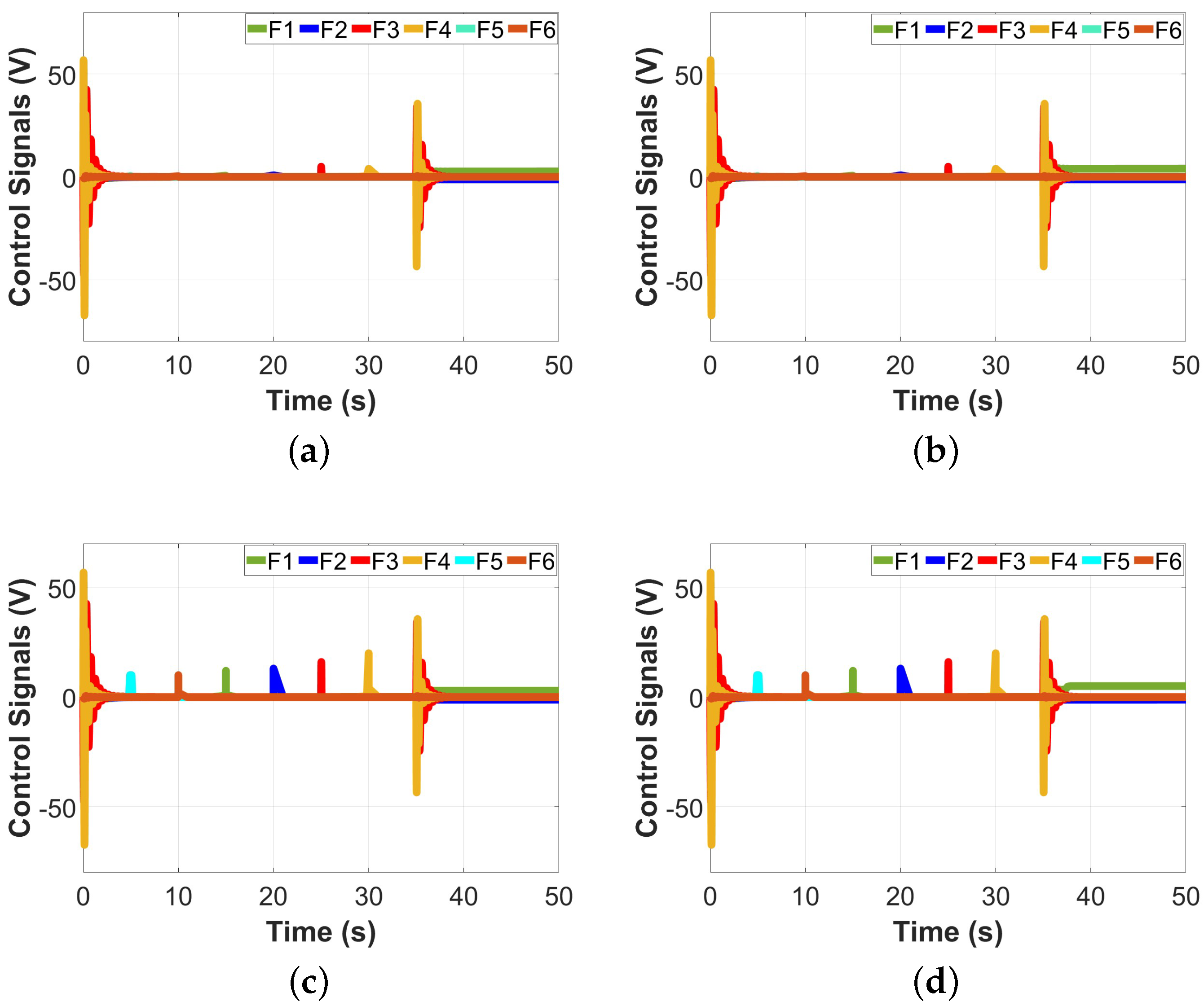
Lastly, both the LQG and PID controllers are tested under parameter variations to observe their behaviors. In the first case (case 1), the parameters of the 6-DOF aircraft landing gear shown in
Table 1 are halved, and in the second case (case 2), the parameters of the landing gear are doubled. The response of the tracking errors and control signals of the two controllers to these two parameter variation cases are shown in
Figure 10 and
Figure 11. These results show that in spite of the varying parameters applied to the system, the LQG controller still maintains the system’s stability by decaying all errors to zero. The controller also does a good job of converging its control signals to zero despite the parameter variations. However, this is not the case for the PID controller, as its tracking errors do not decay to zero as easily as those of the LQG controller. The PID controller also does not easily bring the control signals of the landing gear system to its desired path, thereby affecting the stability of the system. Two performance metrics are also used to assess the performance of the LQG controller. These metrics are
, the integral of tracking errors, and
, the integral of the control signals, which are also used to assess the performance of the LQG and PID controller on the 6-DOF aircraft landing gear. These metrics are mathematically expressed as shown below [
25]:
where
,
,
,
,
,
represent the errors between the desired and actual positions of the system’s six degrees of freedom,
, respectively.
,
,
,
,
, and
denote the control signals at bounce motion, pitch motion, roll motion, nose landing gear, left landing gear, and right landing gear, respectively.
represents the initial time value and
represents the final time value. Using the expressions of the two performance metrics, as shown in Equations (
40) and (
41), the results in
Table 2 are obtained.
When the parameters are not halved or doubled, and for the LQG controller are 0.03651 and 1.774 × , respectively, while those of the PID controller are 0.03805 and 1.881 × , respectively. These results show that when the parameters are not halved or doubled, the LQG controller has a lower tracking index and control effort. When the parameters are halved, as in case 1, and for the LQG controller are 0.02151 and 1.139 × , respectively, and those of the PID controller are 0.02181 and 1.154 × . When the parameters are doubled, as in case 2, and for the LQG controller become 0.06112 and 2.251 × , respectively, and those of the PID controller are 0.06208 and 2.315 × . In both cases, the LQG controller has the highest tracking accuracy with the lowest control effort, thereby displaying that it is much more efficient at controlling the 6-DOF aircraft landing gear than the PID controller.
Figure 4.
LQG controller tested on the 6-DOF aircraft landing gear: nonzero initial condition, nominal case, disturbances in (a) bounce motion; (b) pitch motion; (c) roll motion; (d) nose landing gear; (e) left landing gear; and (f) right landing gear.
Figure 4.
LQG controller tested on the 6-DOF aircraft landing gear: nonzero initial condition, nominal case, disturbances in (a) bounce motion; (b) pitch motion; (c) roll motion; (d) nose landing gear; (e) left landing gear; and (f) right landing gear.
Figure 5.
LQG controller tested on the 6-DOF aircraft landing gear: nonzero initial condition, nominal case, disturbances in (a) tracking errors and (b) control signals.
Figure 5.
LQG controller tested on the 6-DOF aircraft landing gear: nonzero initial condition, nominal case, disturbances in (a) tracking errors and (b) control signals.
Figure 6.
Kalman filter estimate output from the 6-DOF landing gear: nonzero initial condition, nominal case, disturbances in (a) bounce motion; (b) pitch motion; (c) roll motion; (d) nose landing gear; (e) left landing gear; and (f) right landing gear.
Figure 6.
Kalman filter estimate output from the 6-DOF landing gear: nonzero initial condition, nominal case, disturbances in (a) bounce motion; (b) pitch motion; (c) roll motion; (d) nose landing gear; (e) left landing gear; and (f) right landing gear.
Table 1.
Physical parameters of the 6-DOF aircraft landing gear [
10].
Table 1.
Physical parameters of the 6-DOF aircraft landing gear [
10].
| Parameter | Value | Unit |
|---|
| Sprung mass (M) | 22,000 | kg |
| Nose gear unsprung mass () | 130 | kg |
| Left gear unsprung mass () | 260 | kg |
| Right gear unsprung mass () | 260 | kg |
| Nose gear sprung mass stiffness rate () | 6.73 | N/m |
| Left gear sprung mass stiffness rate () | 4.08 | N/m |
| Right gear sprung mass stiffness rate () | 4.08 | N/m |
| Nose gear sprung mass damper rate () | 1.43 | N.s/m |
| Left gear sprung mass damper rate () | 6.25 | N.s/m |
| Right gear sprung mass stiffness rate () | 6.25 | N.s/m |
| Nose gear unsprung mass stiffness rate () | 1.59 | N/m |
| Left gear unsprung mass stiffness rate () | 1.59 | N/m |
| Right gear unsprung mass stiffness rate () | 1.59 | N/m |
| Nose gear unsprung mass damper rate () | 4066 | N.s/m |
| Rear left gear unsprung mass damper rate () | 4066 | N.s/m |
| Rear right gear unsprung mass stiffness rate () | 4066 | N.s/m |
| Mass moment of inertia about x-axis () | 65 | kg.m |
| Mass moment of inertia about y-axis () | 100 | kg.m |
| Distance from CG to the nose landing gear (a) | 7.76 | m |
| Distance from CG to the horizontal axis of main landing gear (b) | 1.94 | m |
| Distance from CG to the left main landing gear (d) | 3.8425 | m |
| Distance from CG to the right main landing gear (e) | 3.8425 | m |
Figure 7.
Kalman filter estimation error: nonzero initial condition, nominal case, disturbances.
Figure 7.
Kalman filter estimation error: nonzero initial condition, nominal case, disturbances.
Figure 8.
PID controller tested on the 6-DOF aircraft landing gear: nonzero initial condition, nominal case, disturbances in (a) bounce motion; (b) pitch motion; (c) roll motion; (d) nose landing gear; (e) left landing gear; and (f) right landing gear.
Figure 8.
PID controller tested on the 6-DOF aircraft landing gear: nonzero initial condition, nominal case, disturbances in (a) bounce motion; (b) pitch motion; (c) roll motion; (d) nose landing gear; (e) left landing gear; and (f) right landing gear.
Figure 9.
PID controller tested on the 6-DOF aircraft landing gear: nonzero initial condition, nominal case, disturbances in (a) tracking errors; and (b) control signals.
Figure 9.
PID controller tested on the 6-DOF aircraft landing gear: nonzero initial condition, nominal case, disturbances in (a) tracking errors; and (b) control signals.
Figure 10.
The 6-DOF aircraft landing gear tracking errors’ responses to parameter variations: (a) LQG controller’s tracking error in case 1; (b) LQG controller’s tracking error in case 2; (c) PID controller’s tracking error in case 1; (d) PID controller’s tracking error in case 2.
Figure 10.
The 6-DOF aircraft landing gear tracking errors’ responses to parameter variations: (a) LQG controller’s tracking error in case 1; (b) LQG controller’s tracking error in case 2; (c) PID controller’s tracking error in case 1; (d) PID controller’s tracking error in case 2.
Figure 11.
The 6-DOF aircraft landing gear control signals’ responses to parameter variations: (a) LQG controller’s control signal in case 1; (b) LQG controller’s control signal in case 2; (c) PID controller’s control signal in case 1; (d) PID controller’s control signal in case 2.
Figure 11.
The 6-DOF aircraft landing gear control signals’ responses to parameter variations: (a) LQG controller’s control signal in case 1; (b) LQG controller’s control signal in case 2; (c) PID controller’s control signal in case 1; (d) PID controller’s control signal in case 2.
Table 2.
Performance metric comparison: 6-DOF aircraft landing gear.
Table 2.
Performance metric comparison: 6-DOF aircraft landing gear.
| Performance Metric | LQG | PID |
|---|
| 0.03651 | 0.03805 |
| 1.774 × | 1.881 × |
| in case 1 | 0.02151 | 0.02182 |
| in case 1 | 1.139 × | 1.154 × |
| in case 2 | 0.06112 | 0.06208 |
| in case 2 | 2.251 × | 2.317 × |











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}