
Laboratory-Scale Airborne Wind Energy Conversion Emulator Using OPAL-RT Real-Time Simulator

 , ,
, ,  ,
, 
Abstract
:1. Introduction
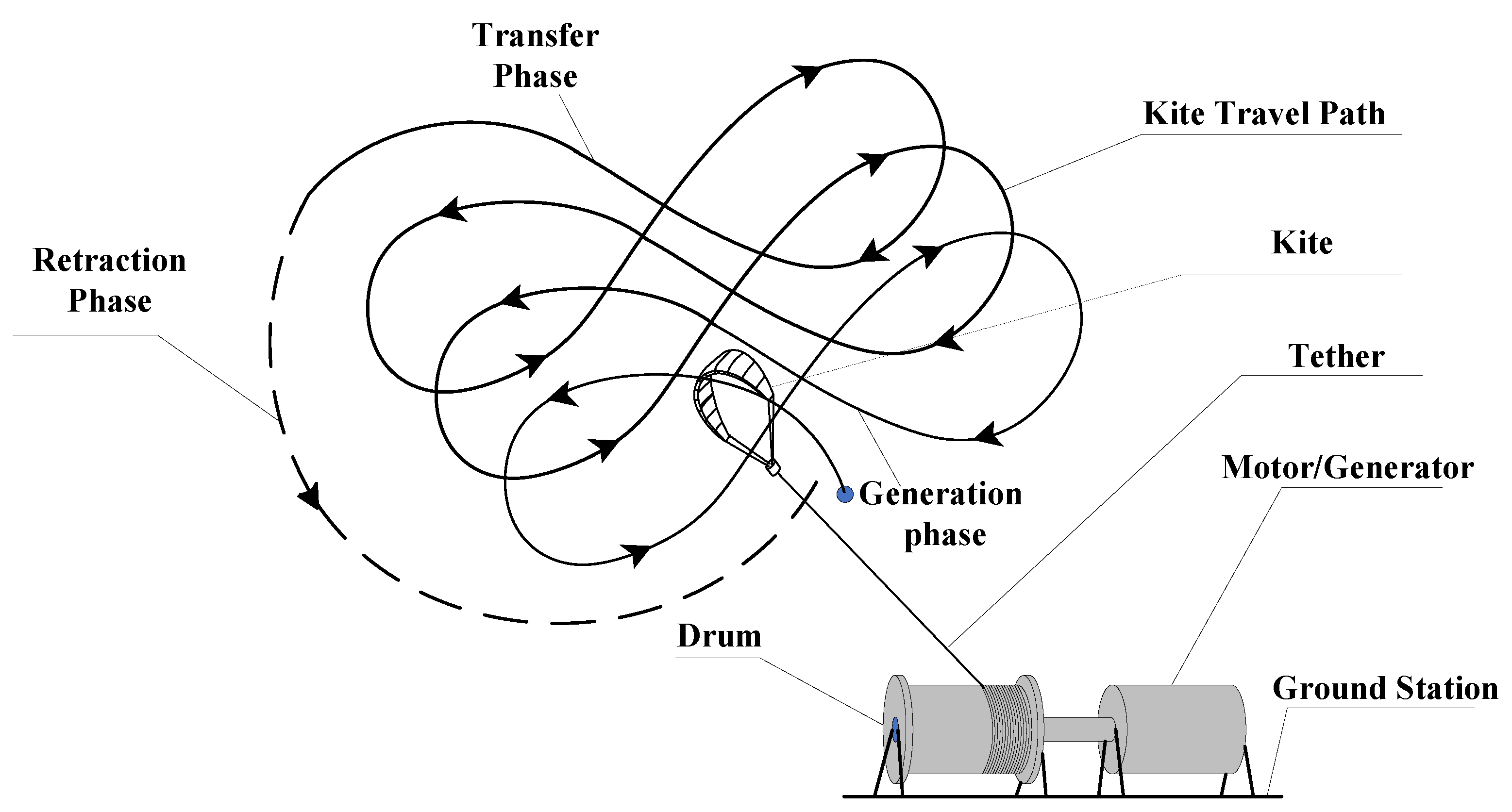
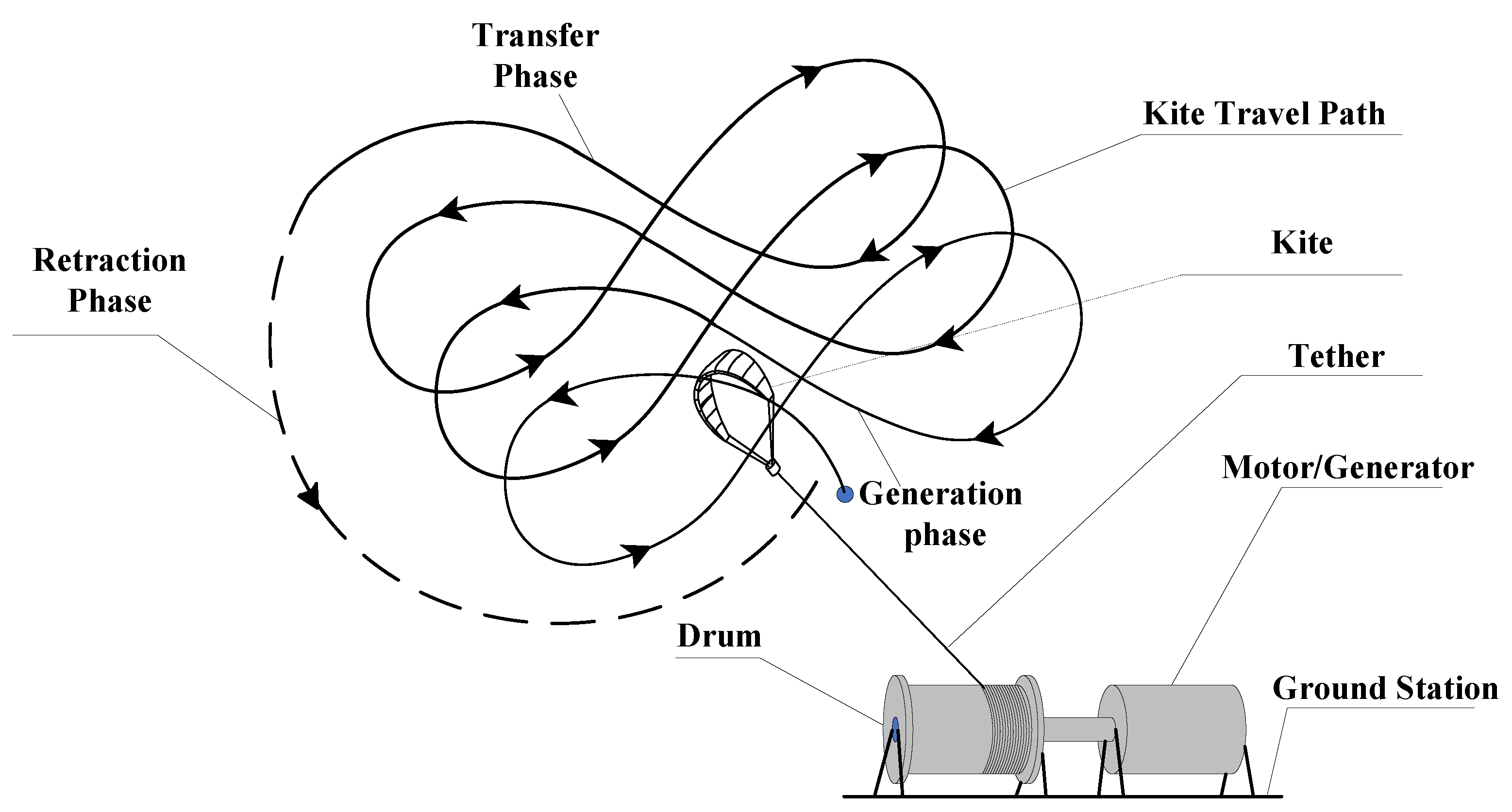
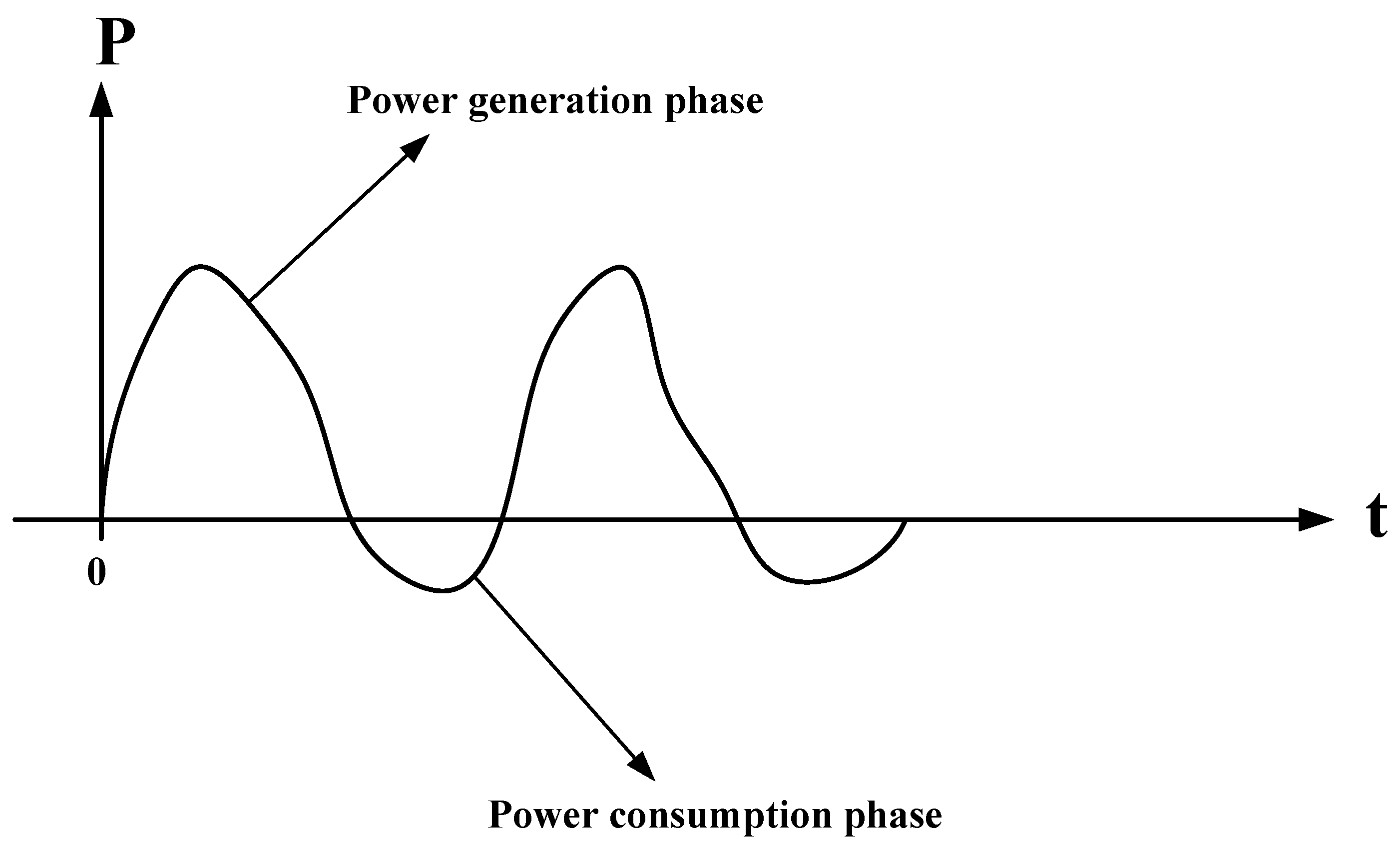
2. Airborne Wind Energy System
- A new approach to wind energy that involves creating a laboratory-scale kite-based emulator that can be tested in real-time using various kite parameters to determine its effectiveness for different capacity-building purposes.
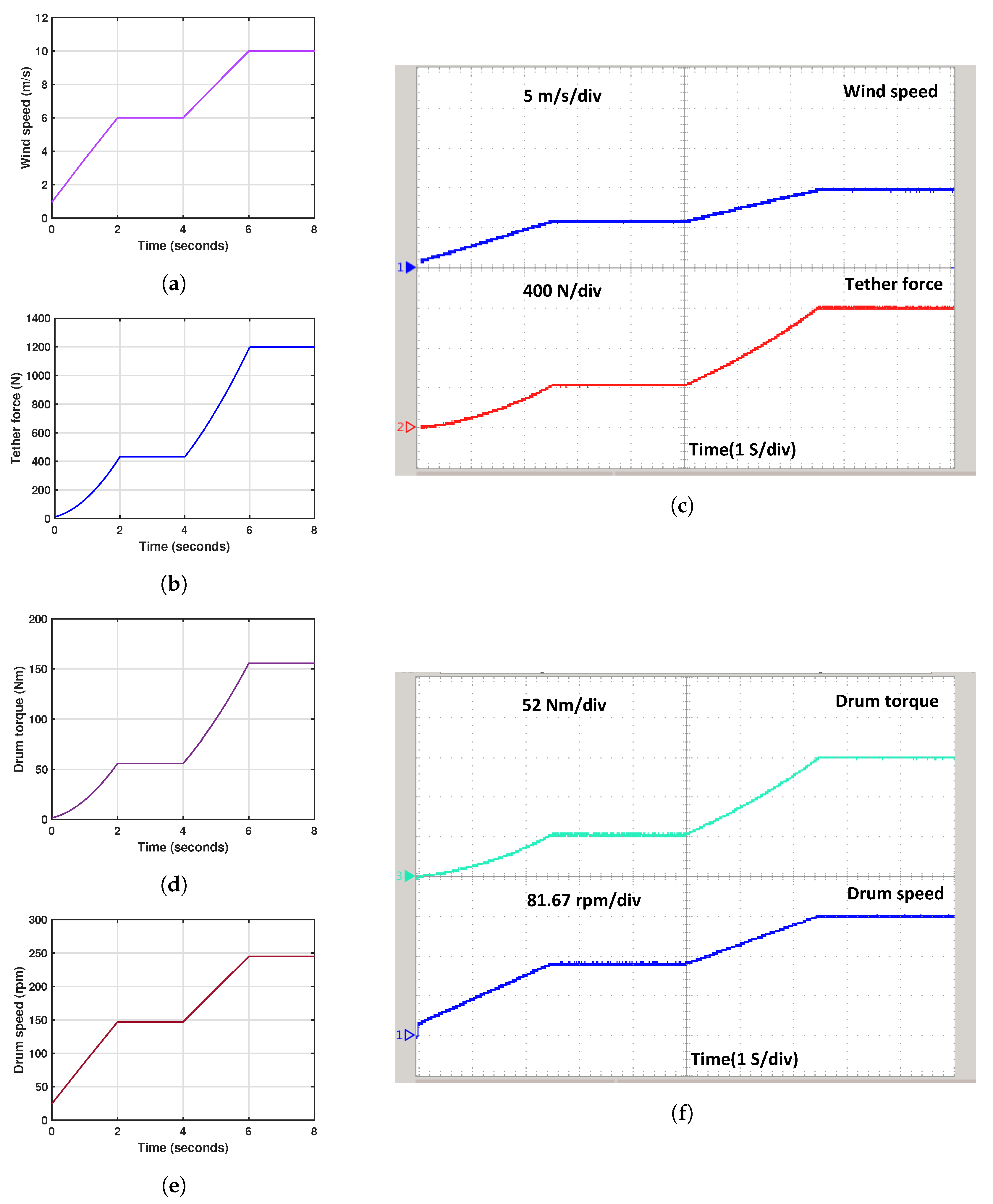
- The literature above needs to provide information on specific parameters of kite dynamics, such as tether force, drum speed, drum torque, and drum power, in the simulation results.
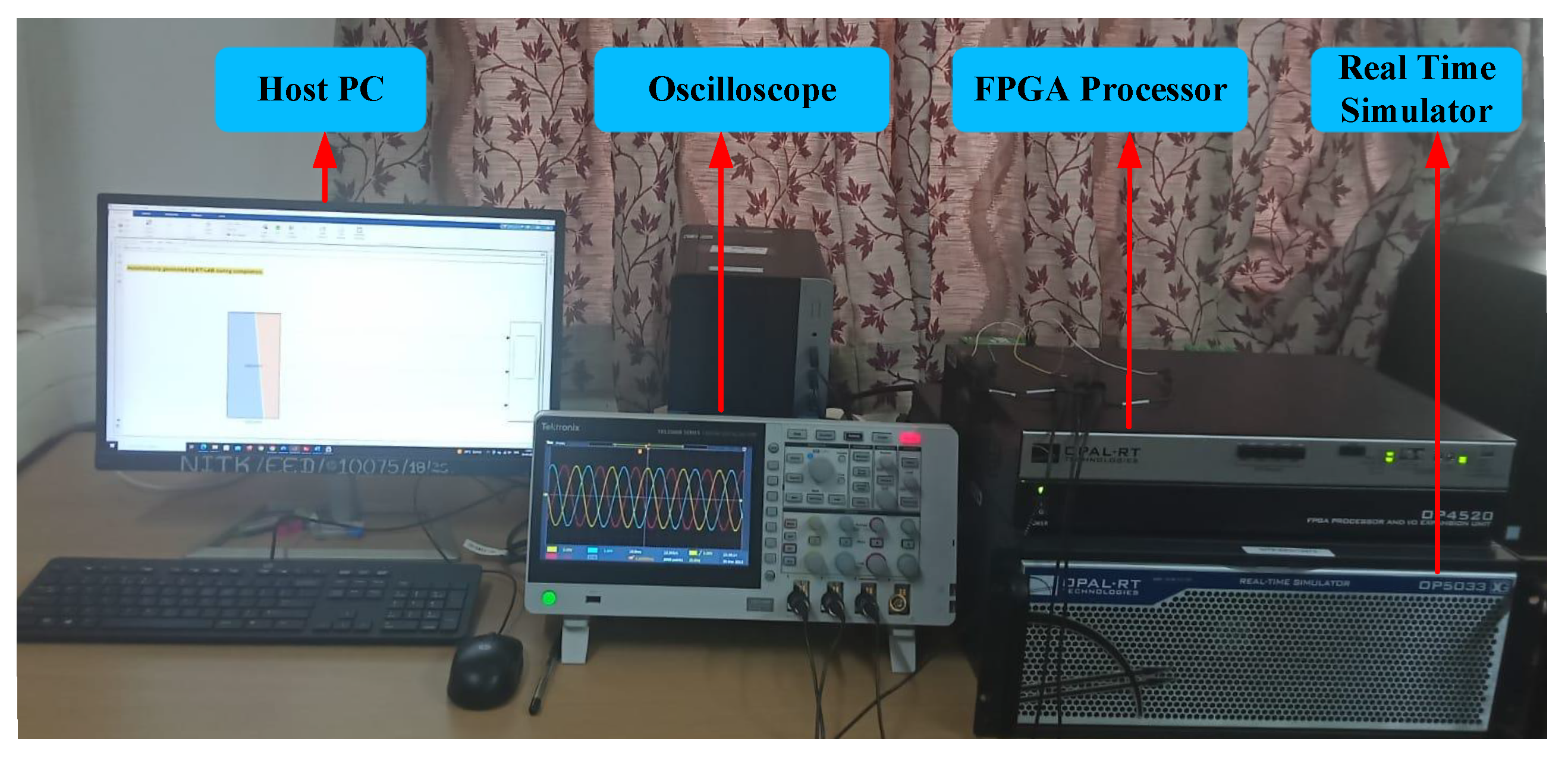
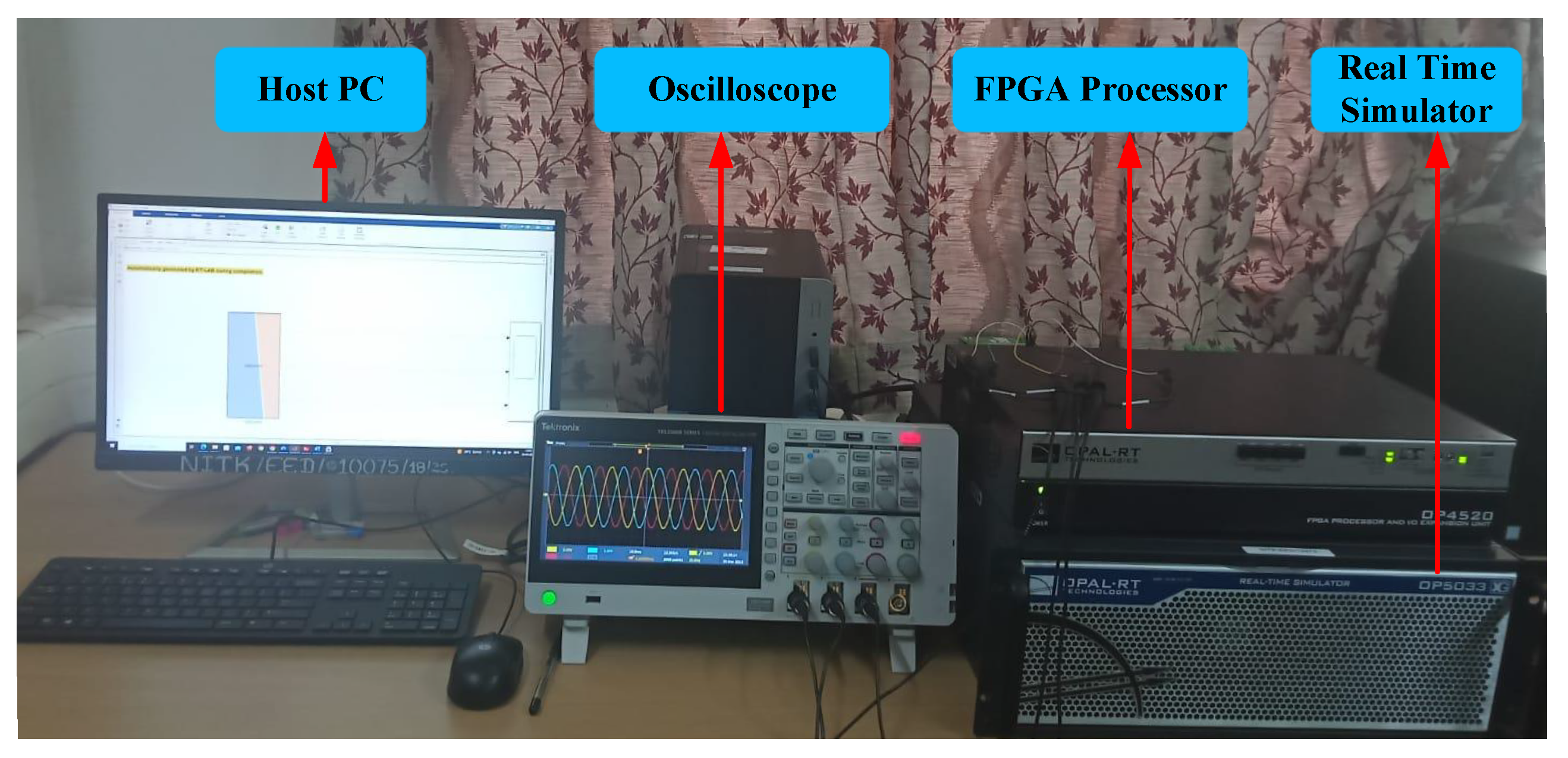
- The simulated findings are validated in real-time using the OPAL-RT simulator, based on Hardware in Loop (HIL) technology.
- The Laboratory-Scale Airborne Wind Energy Conversion System’s dynamic characteristics are demonstrated, and its accuracy is confirmed through real-time OPAL-RT simulation.
3. Mathematical Modelling of LAWECS Emulator
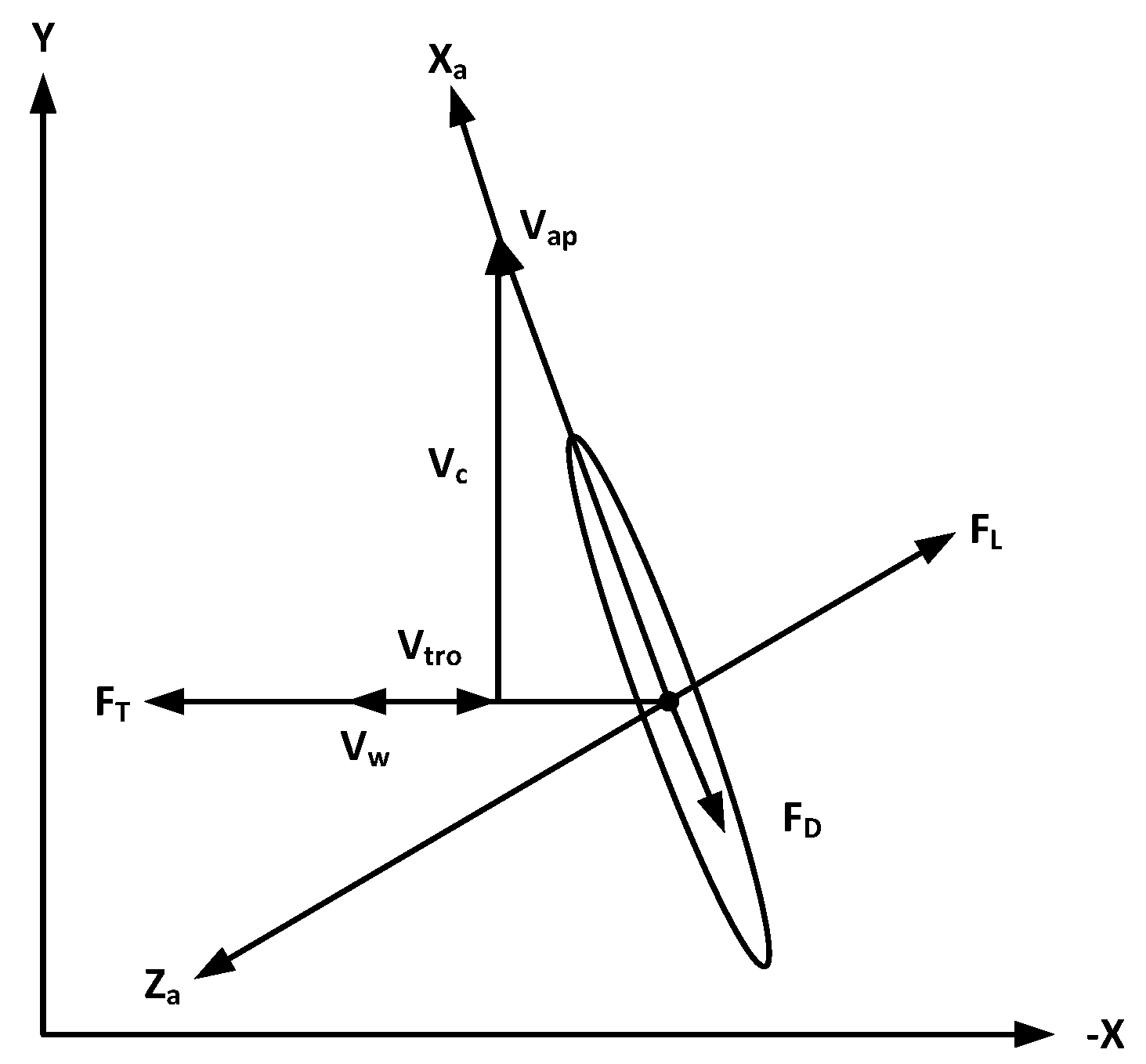
3.1. Kite Modelling
- Massless point model for the lifting body.
- Massless tether connected to the ground with zero drag.
- Constant and uniform wind in the direction opposite to the flight path.
- Steady flight of the lifting body.
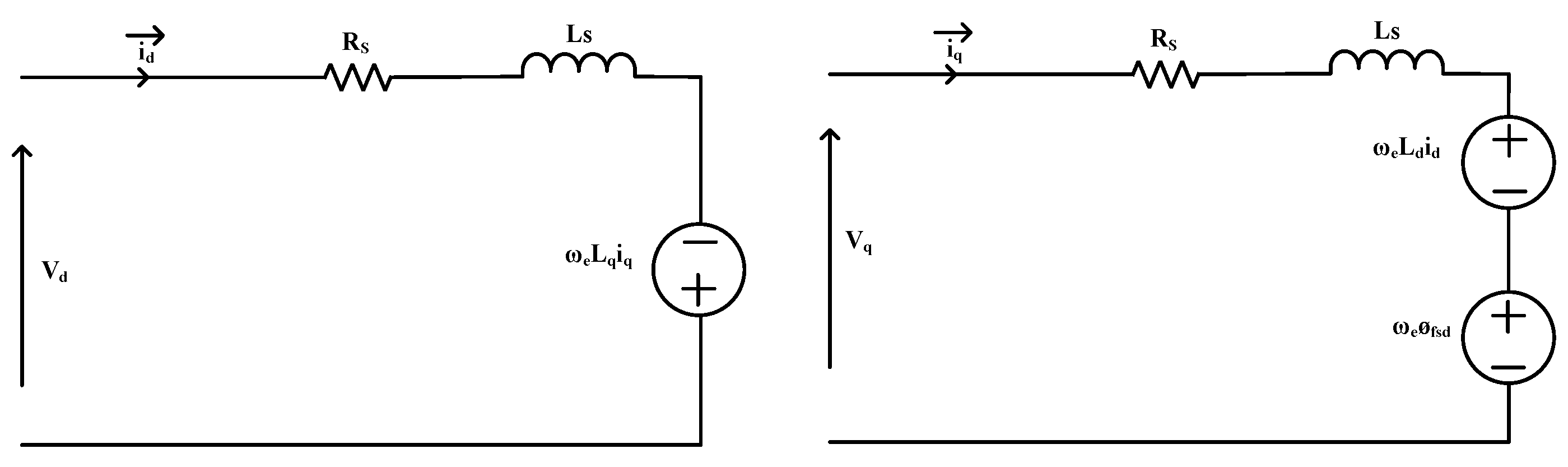
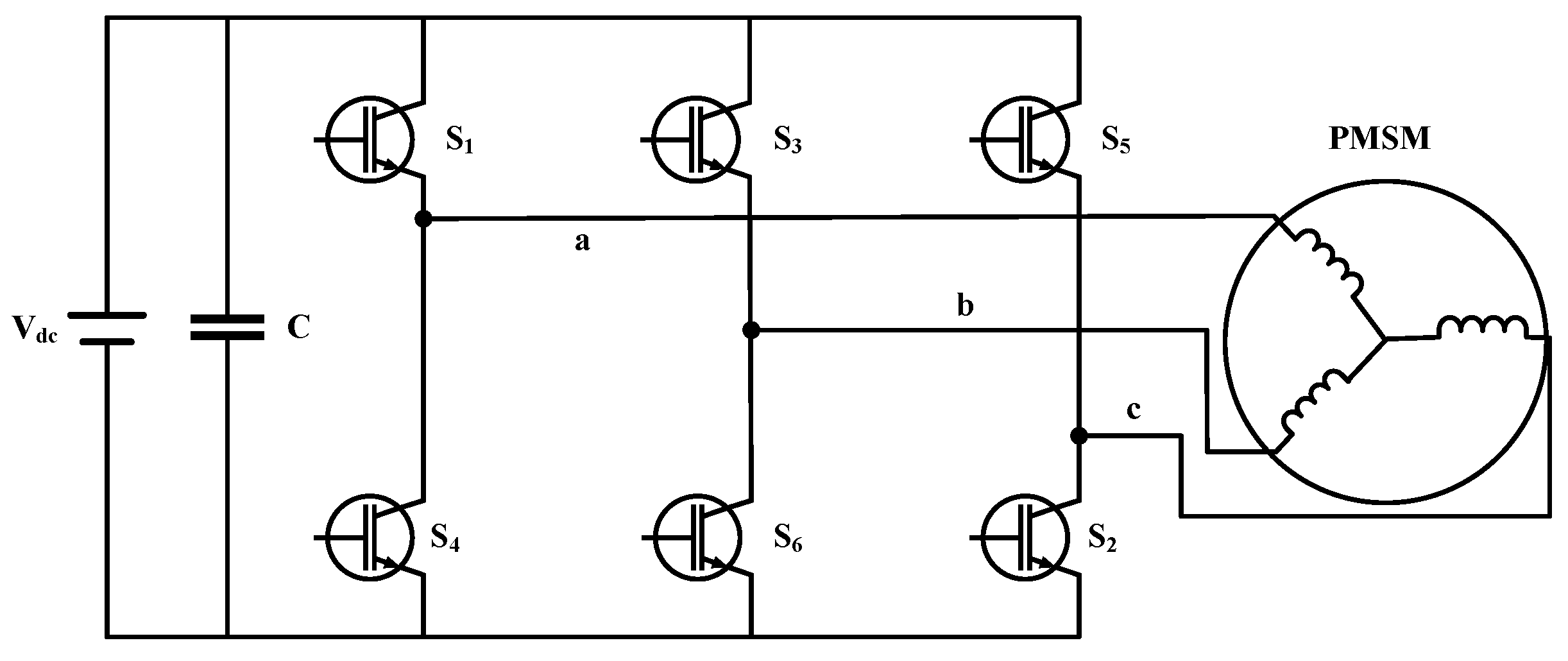
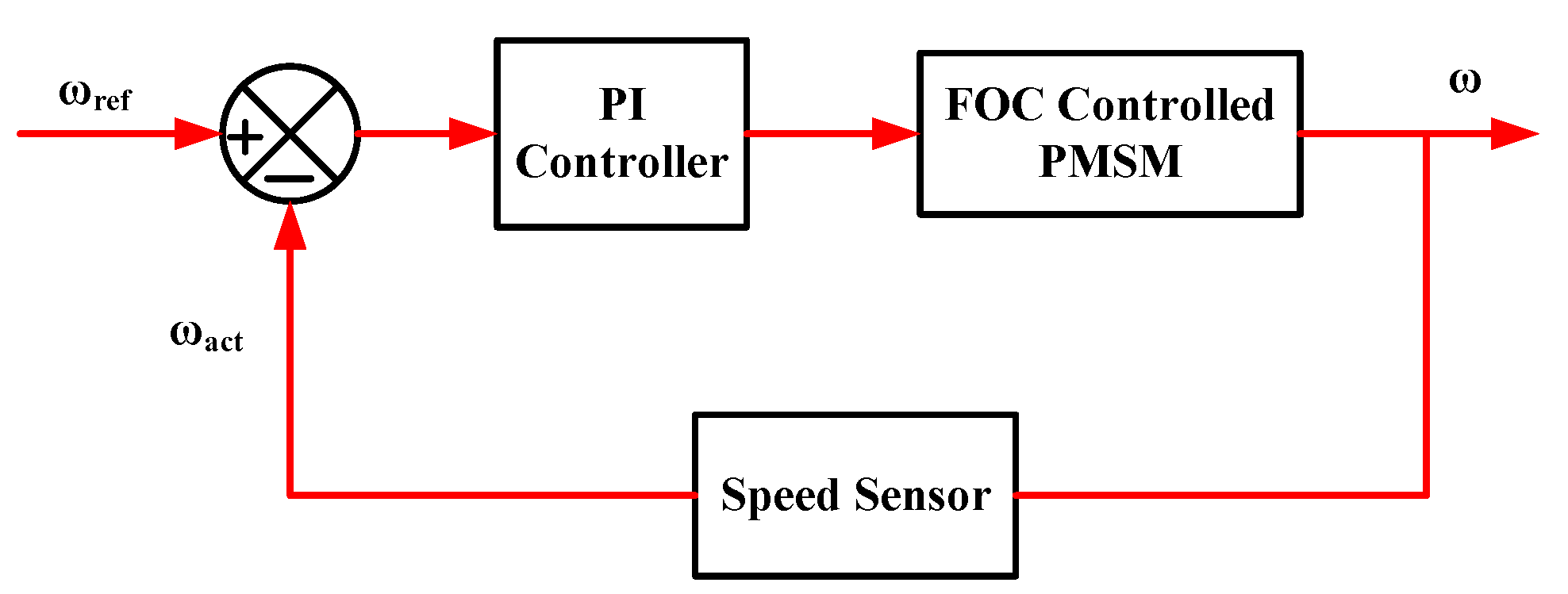
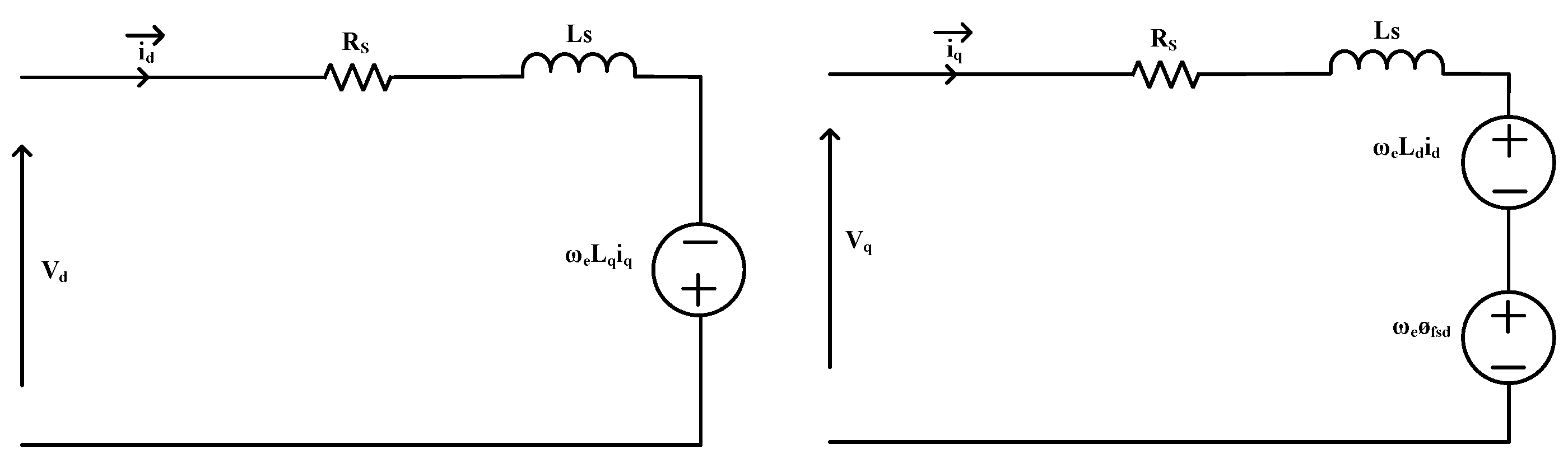
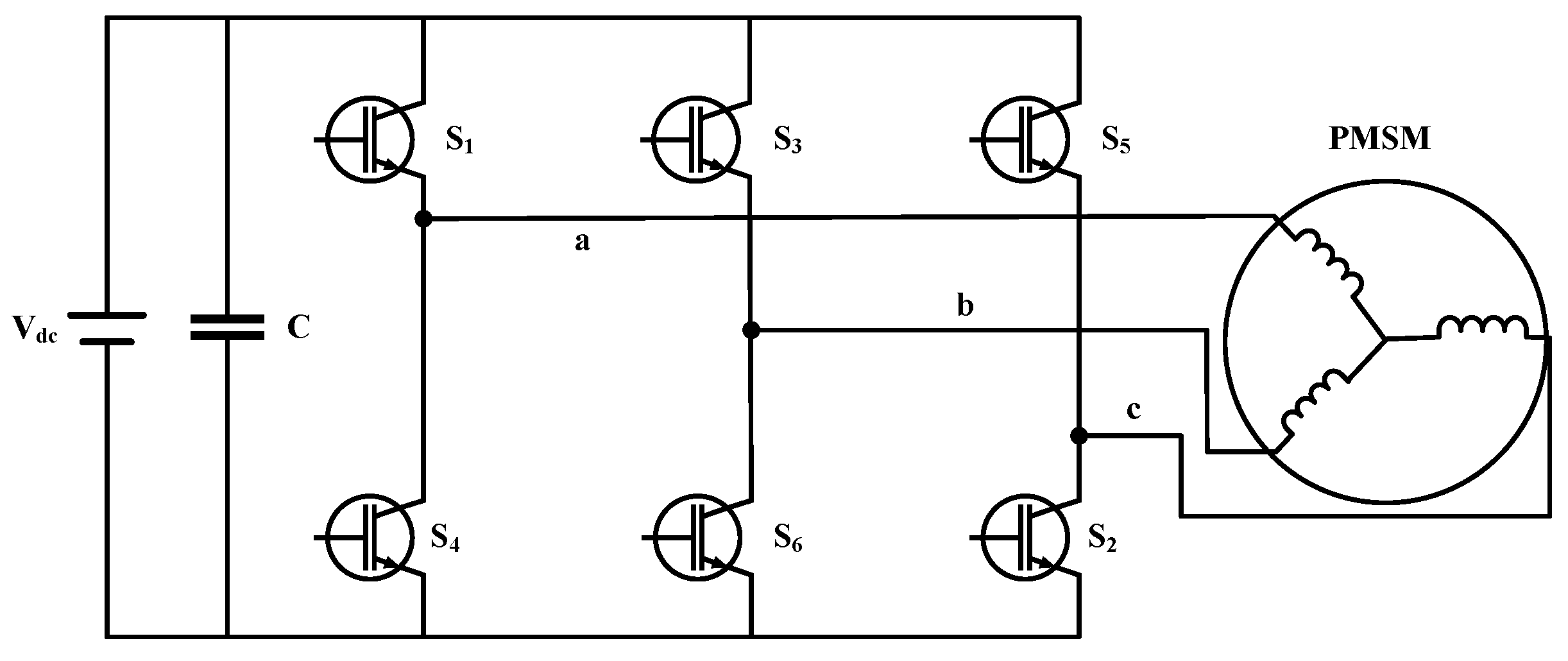
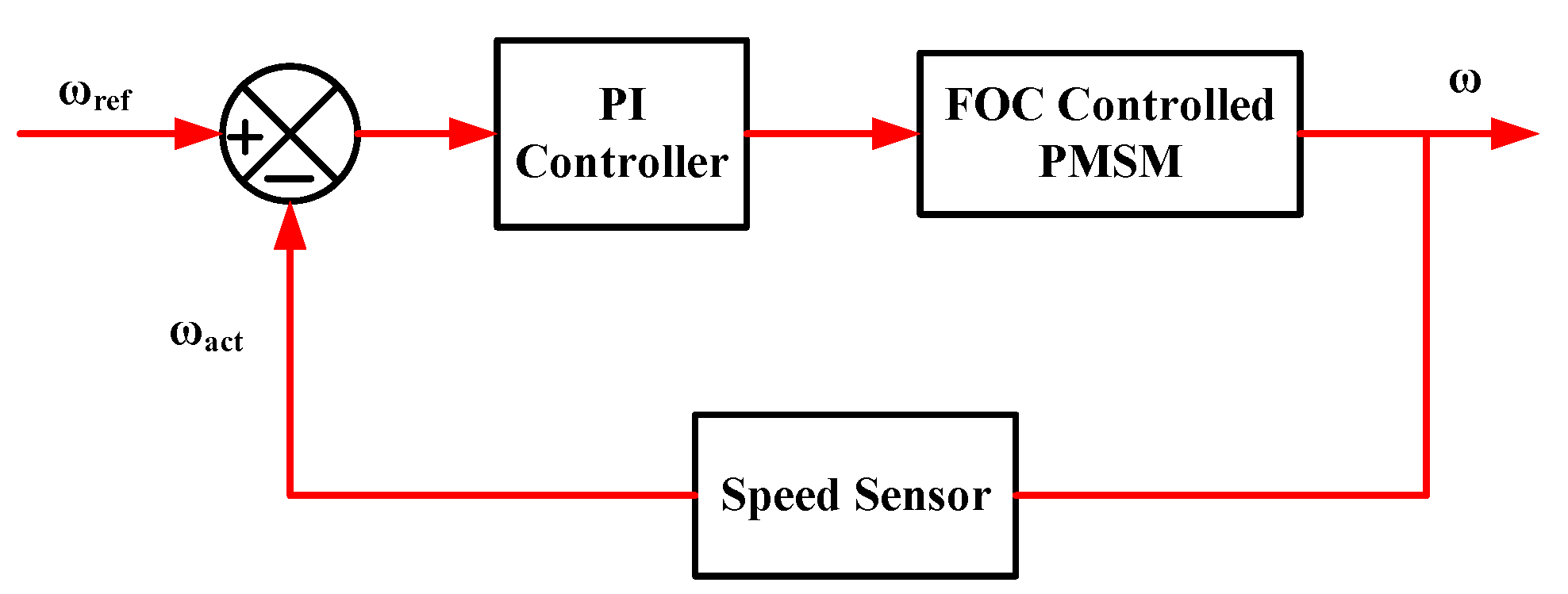
3.2. PMSM Model
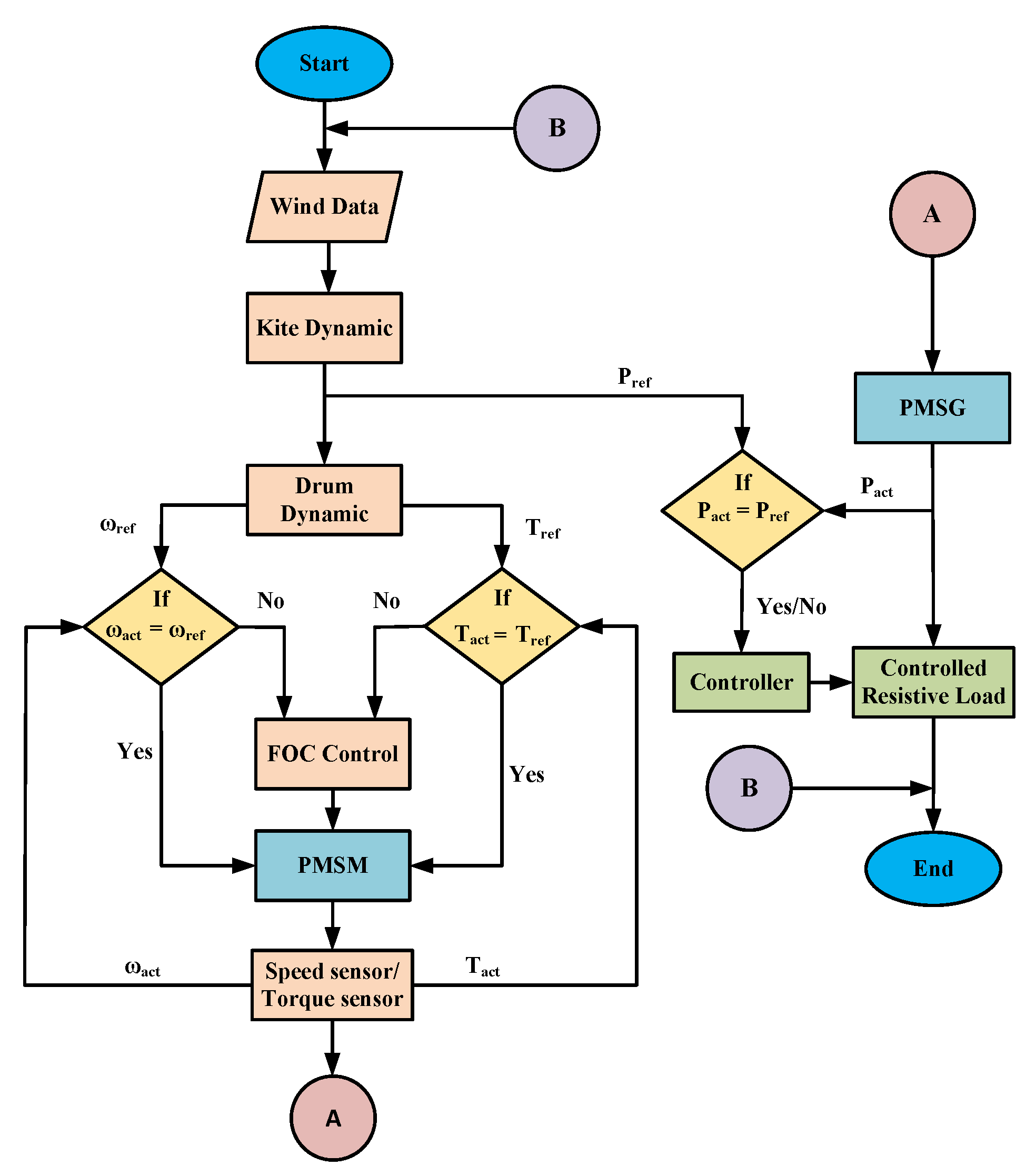
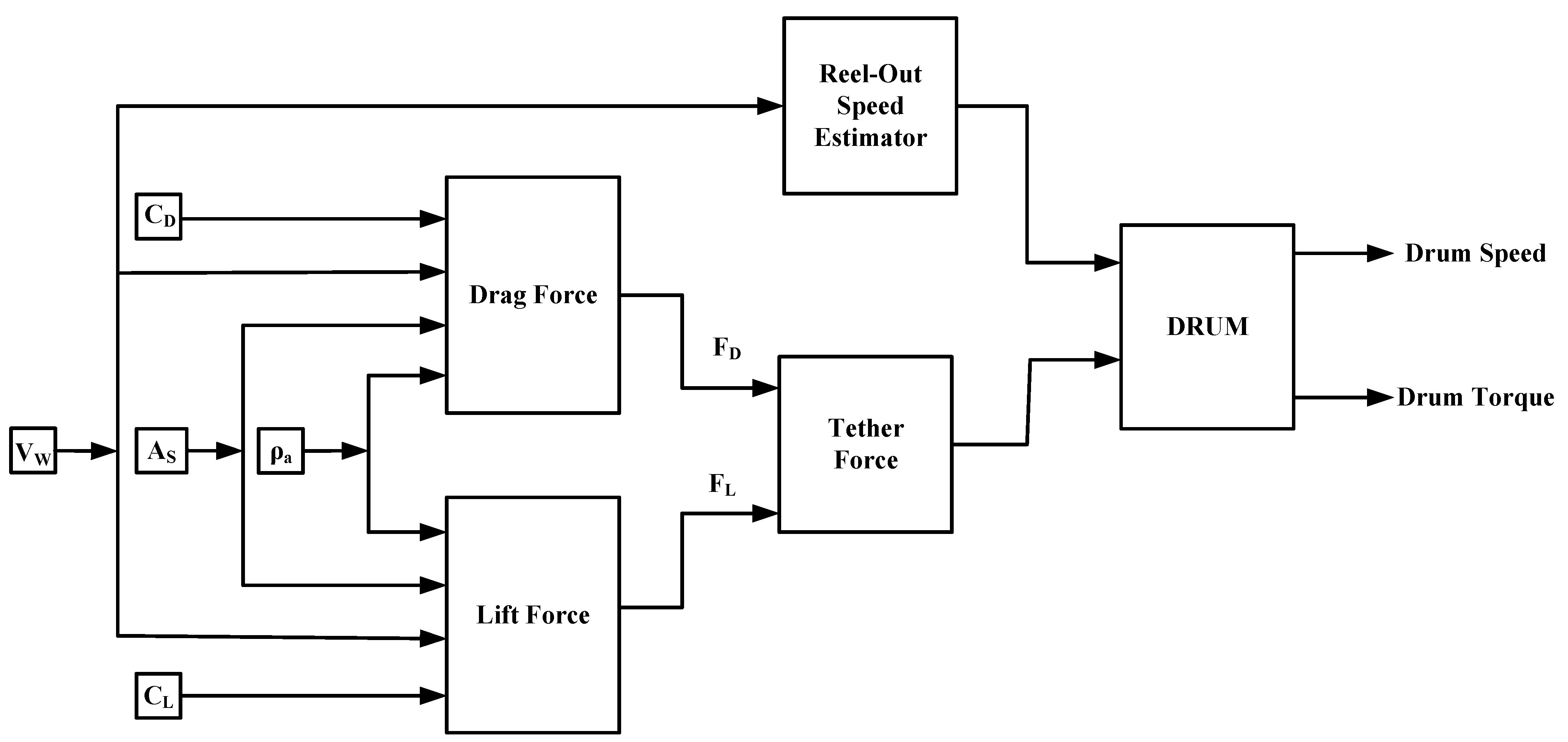
3.3. Simulation Modelling of Kite System
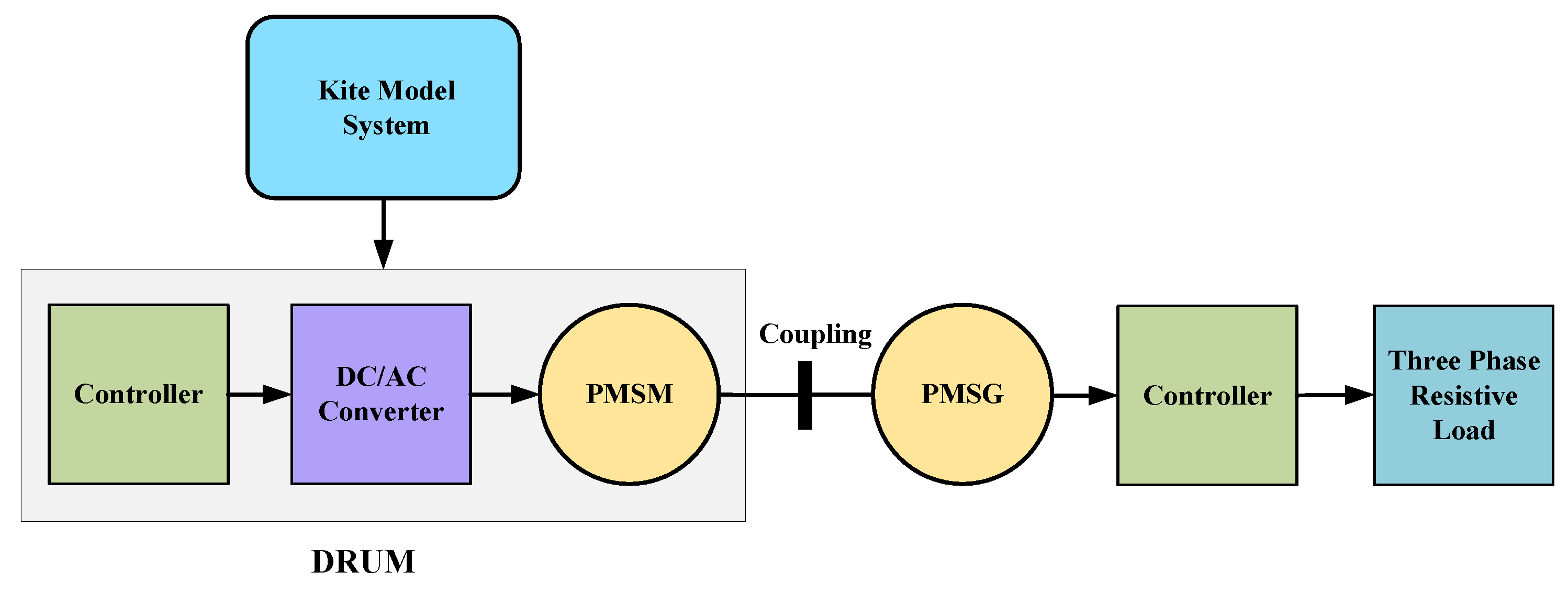
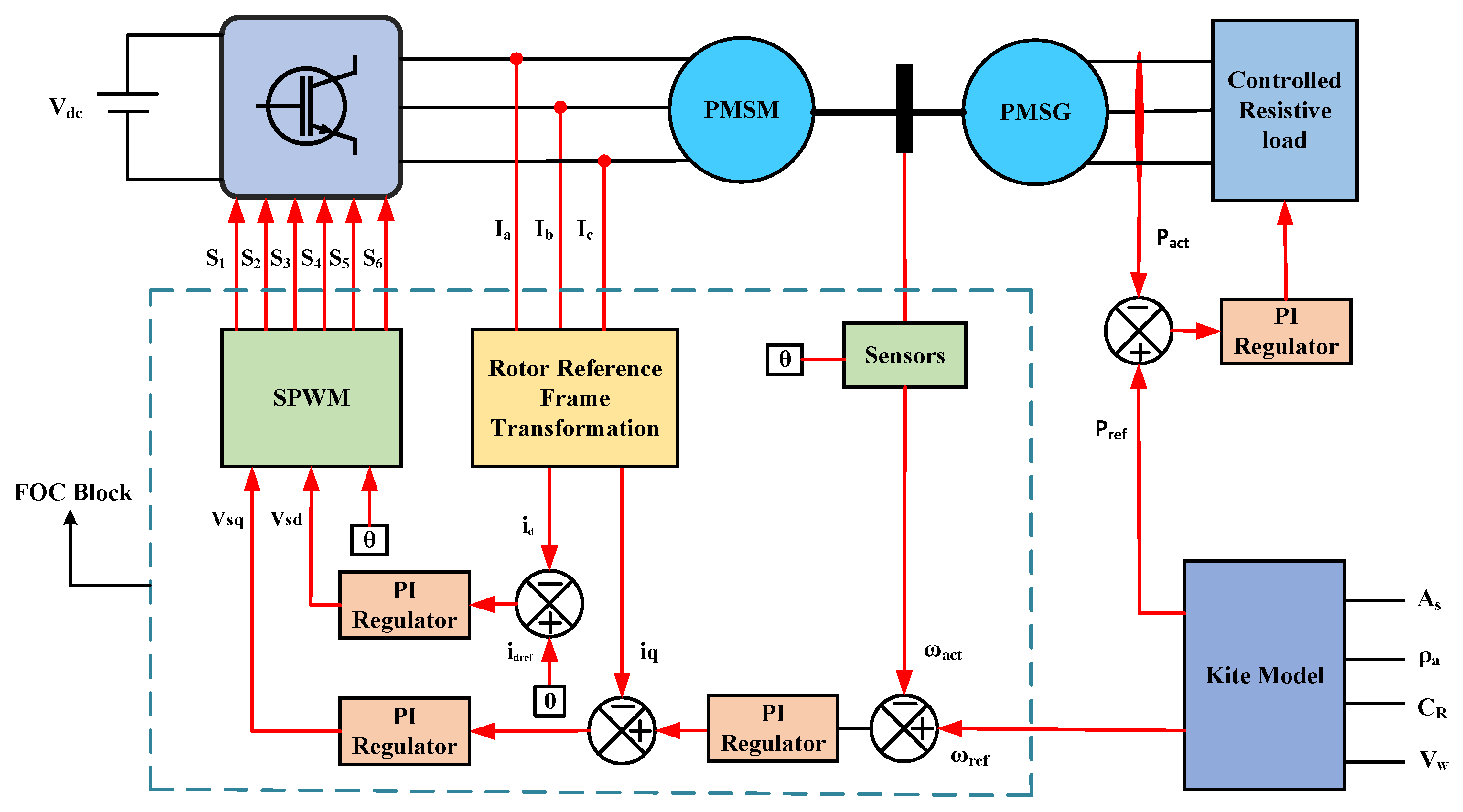
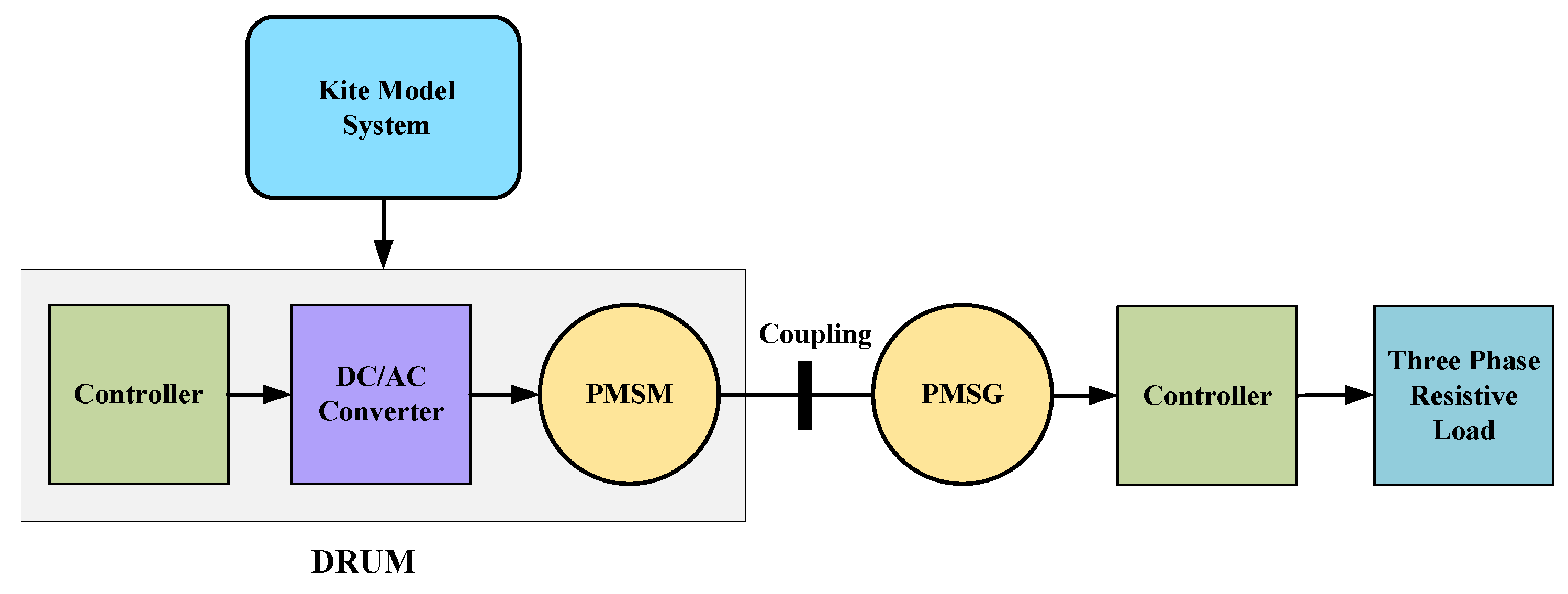
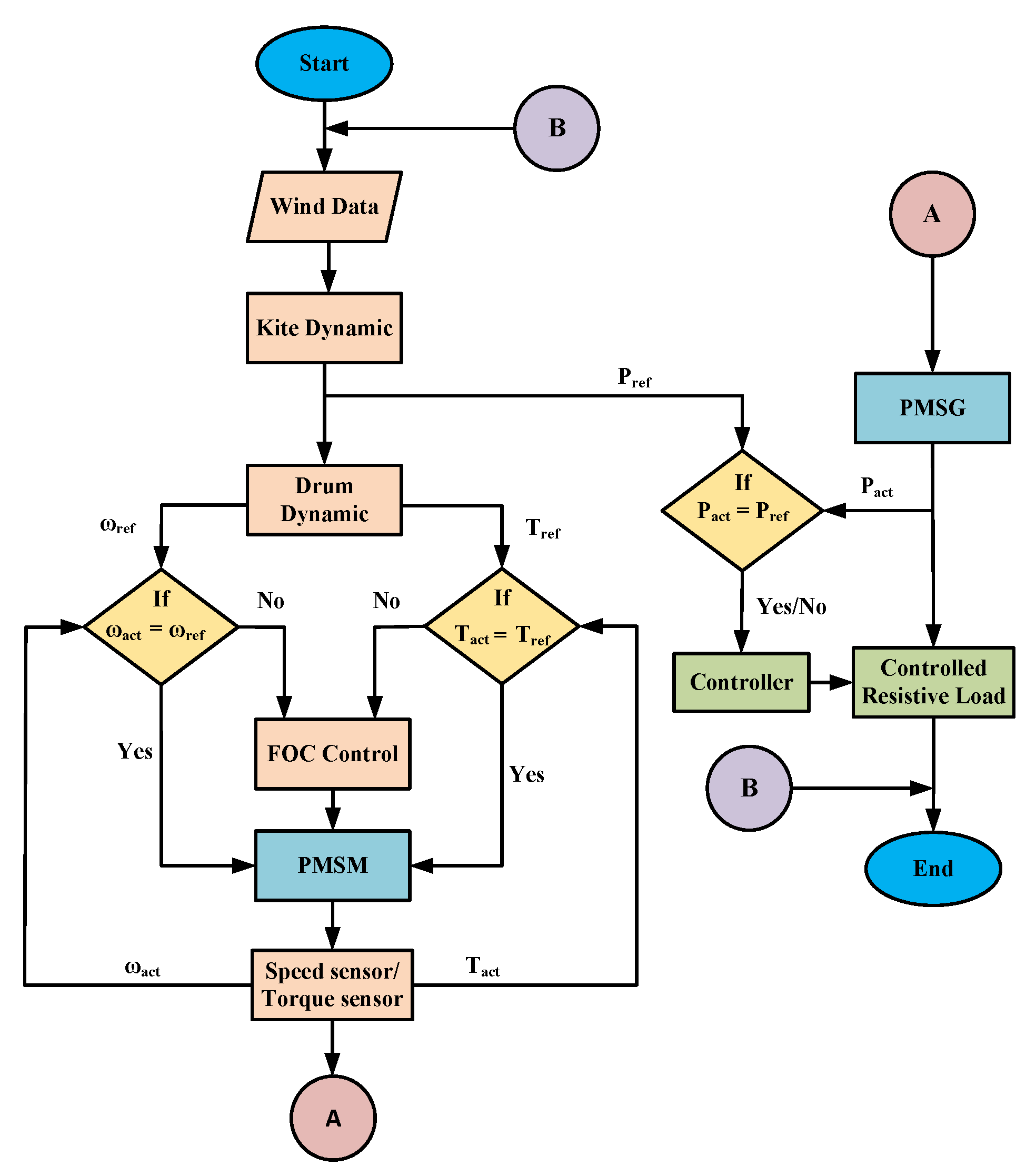
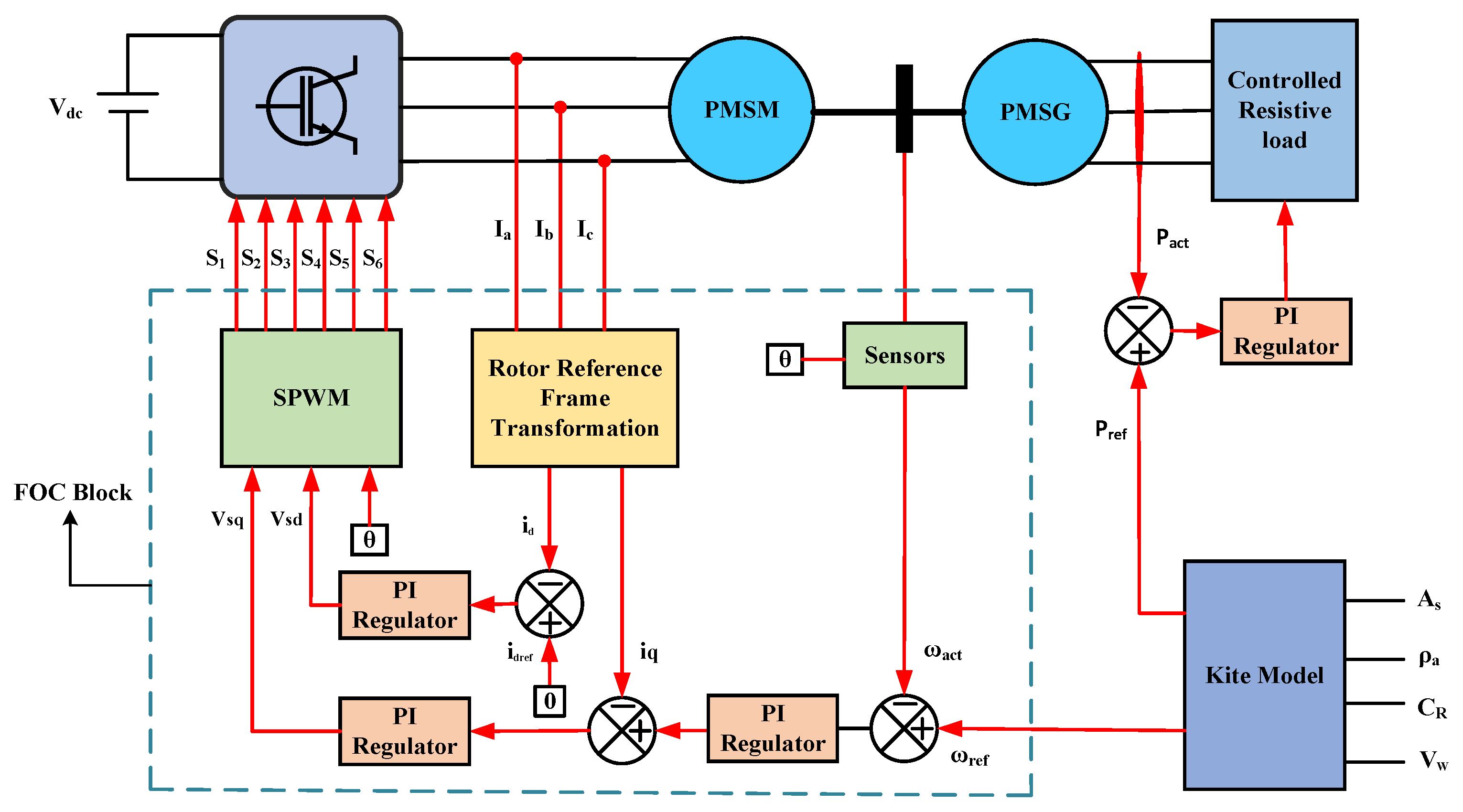
3.4. LAWECS Emulator Model
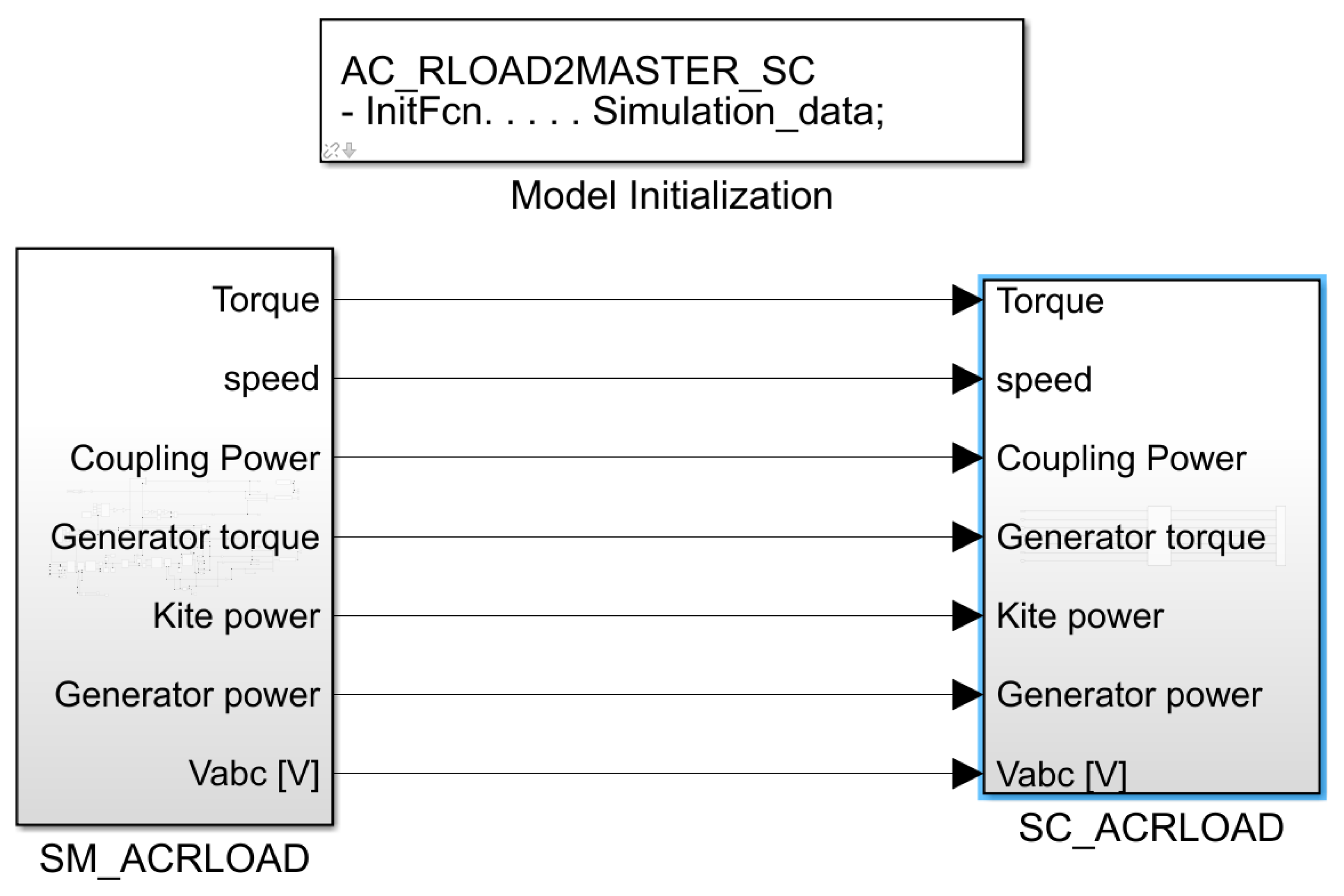
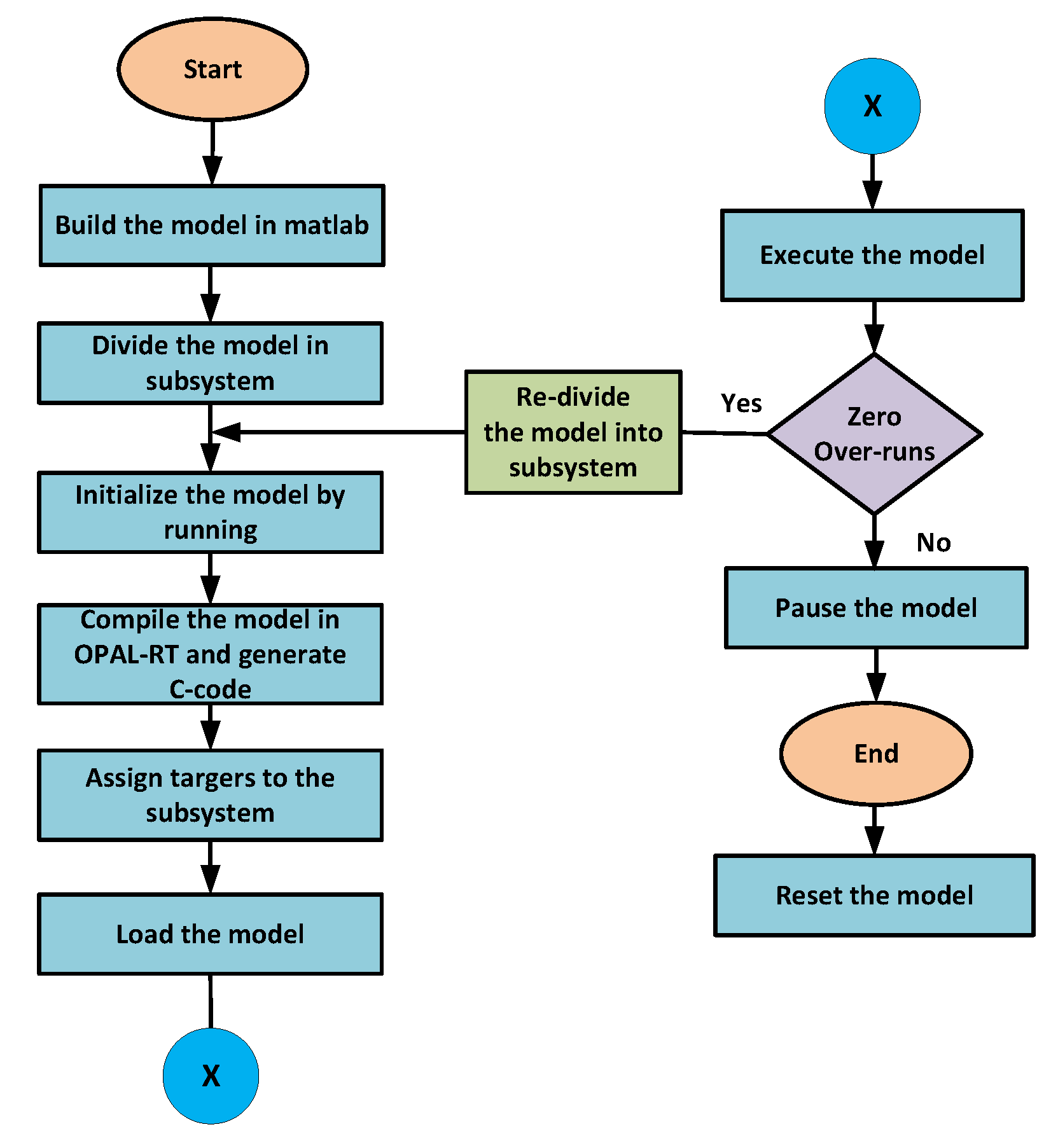
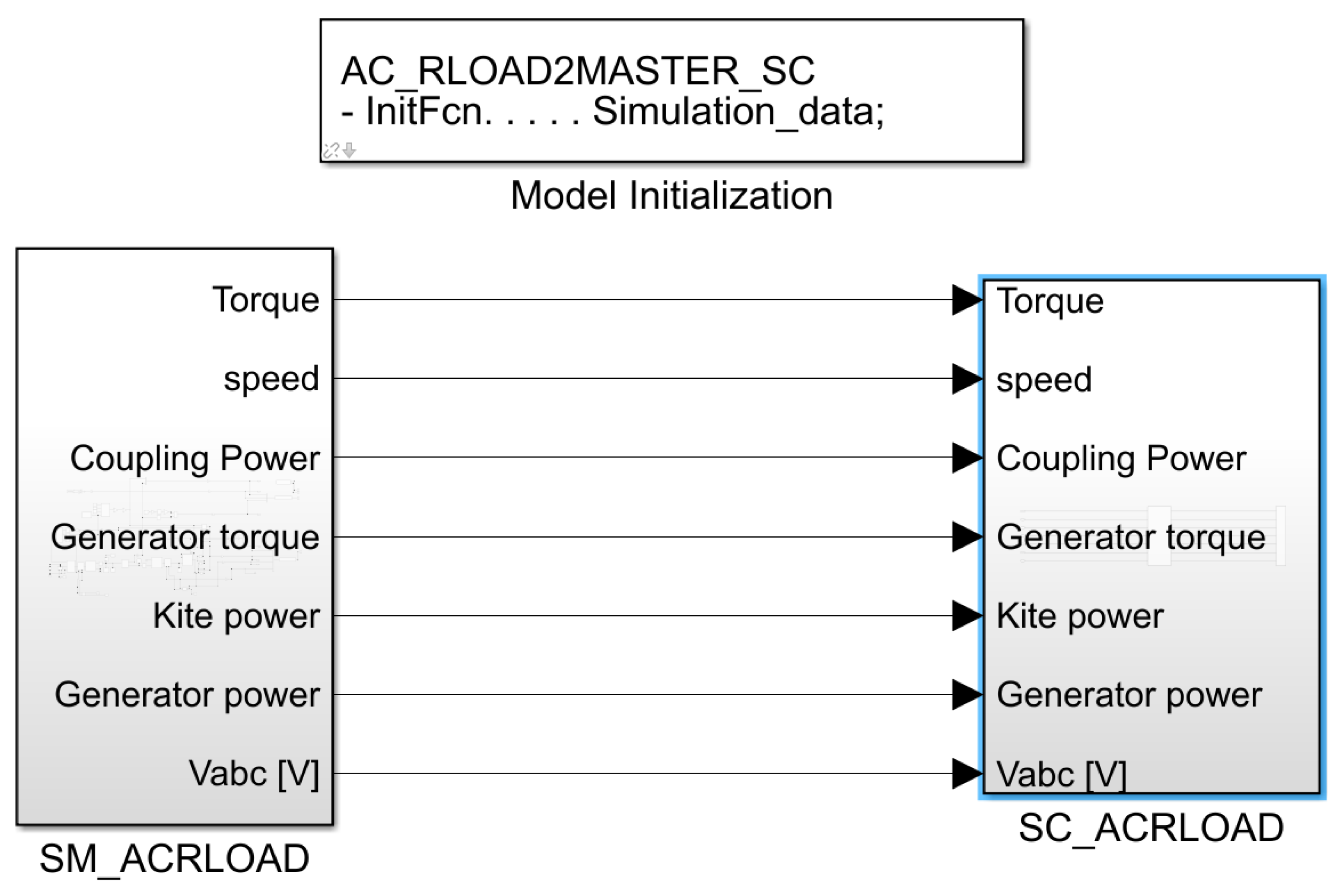
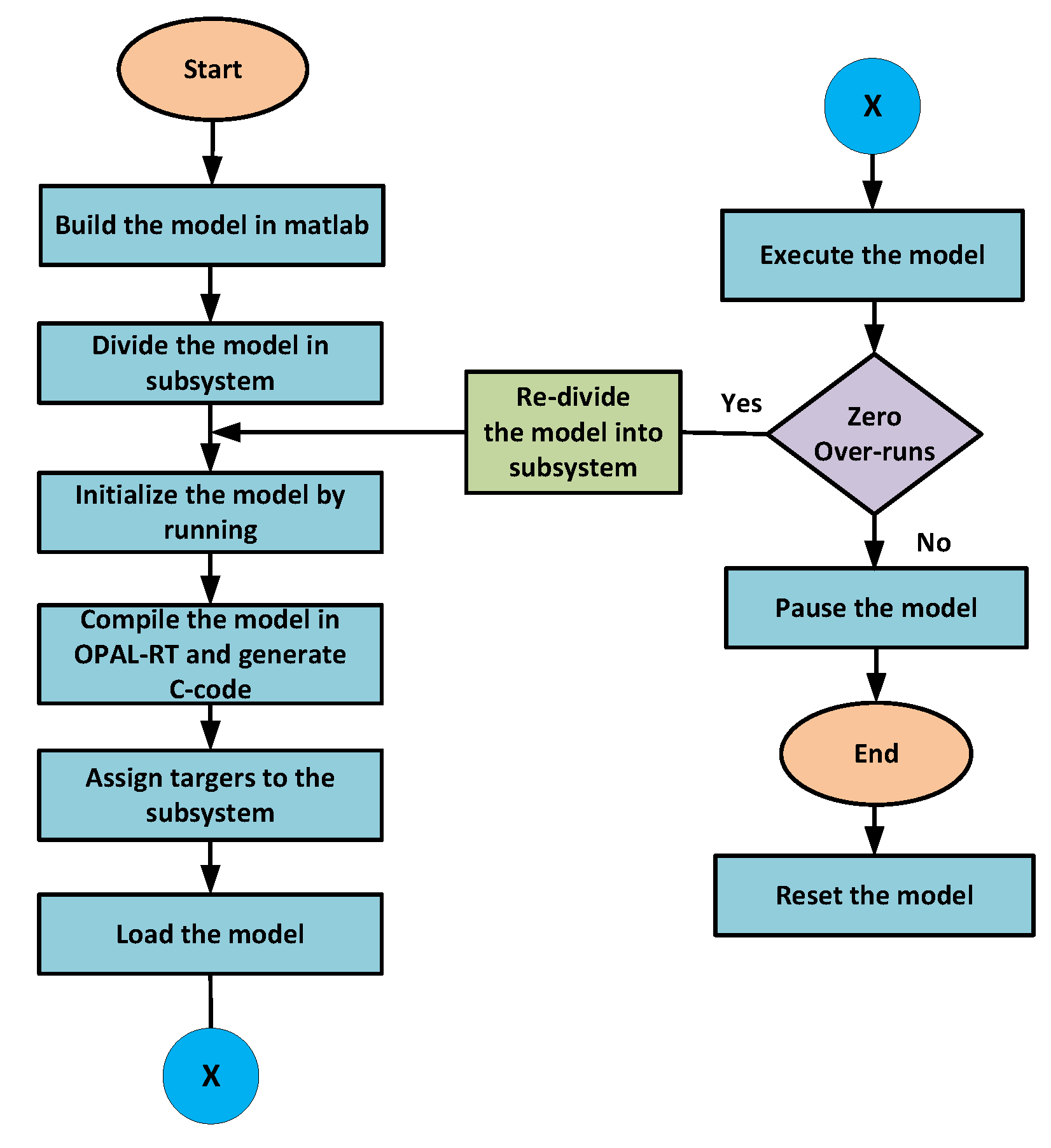
3.5. Depiction of LAWECS Model for Real-Time Simulation
- Validation: RTDS simulations are used to validate MATLAB models. The real-time simulation results can be considered as a reference or ground truth against which MATLAB simulations are compared for validation purposes.
- Accuracy and Fidelity: MATLAB may not accurately simulate system behaviour. RTDS, on the other hand, is developed for real-time power system simulation, and results are typically more accurate.
- Real-time response: RTDS is designed to run simulations in real time, making it suitable for testing and validating control systems and protection schemes. MATLAB simulations might not provide real-time responses, which can be crucial for assessing the performance of control algorithms and devices in real-world scenarios.
4. Simulation Result and Discussion
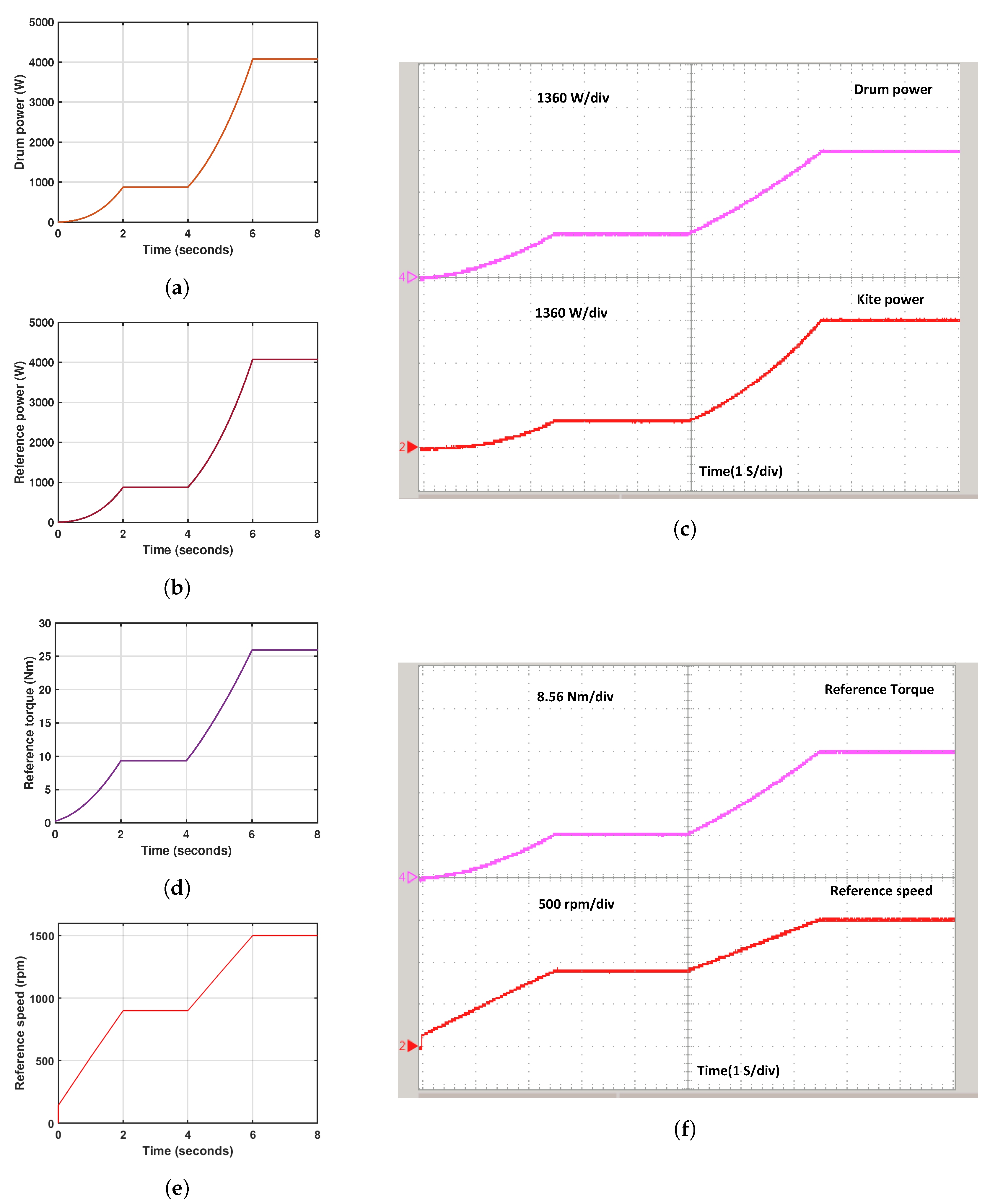
4.1. Kite Property Analysis
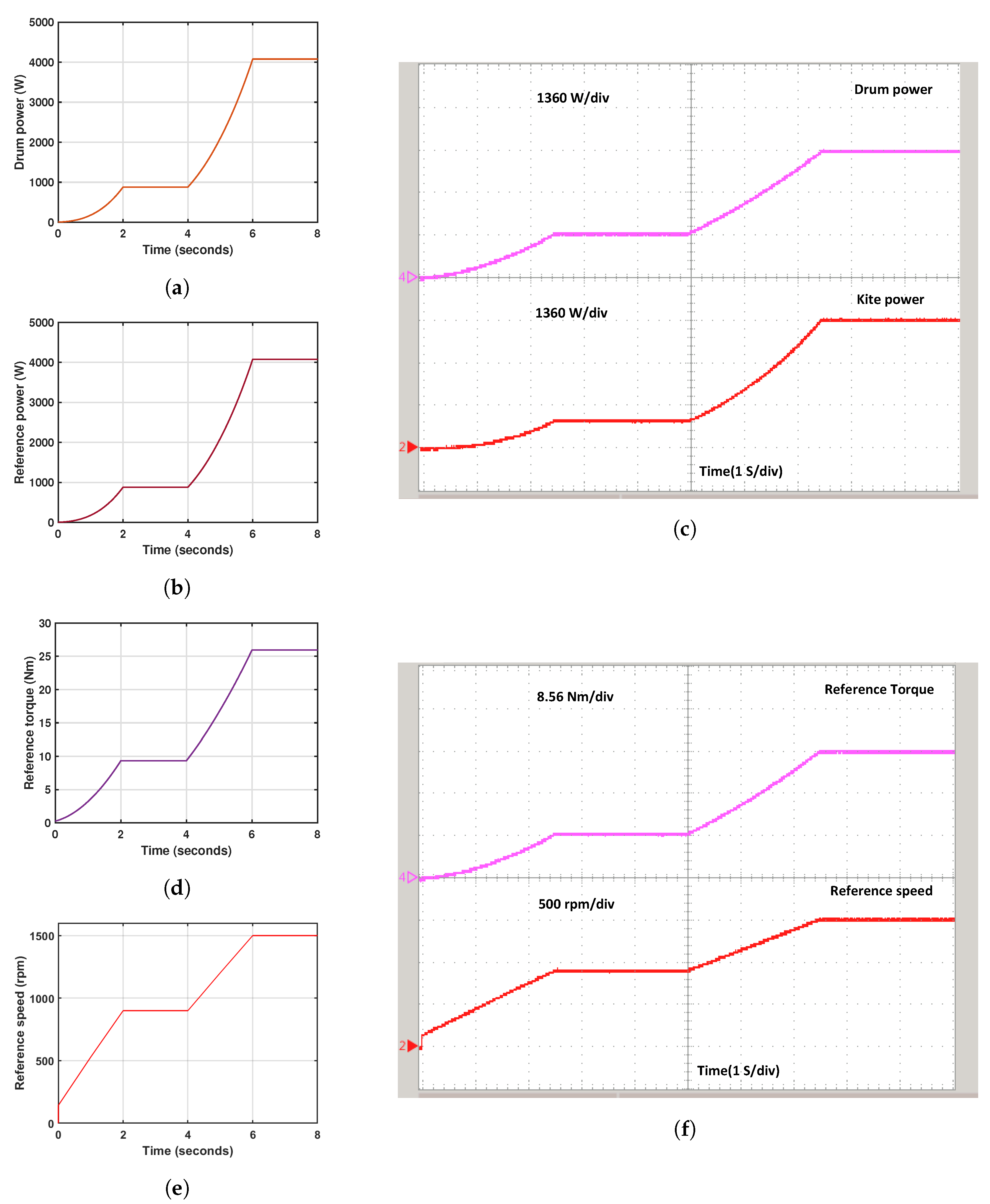
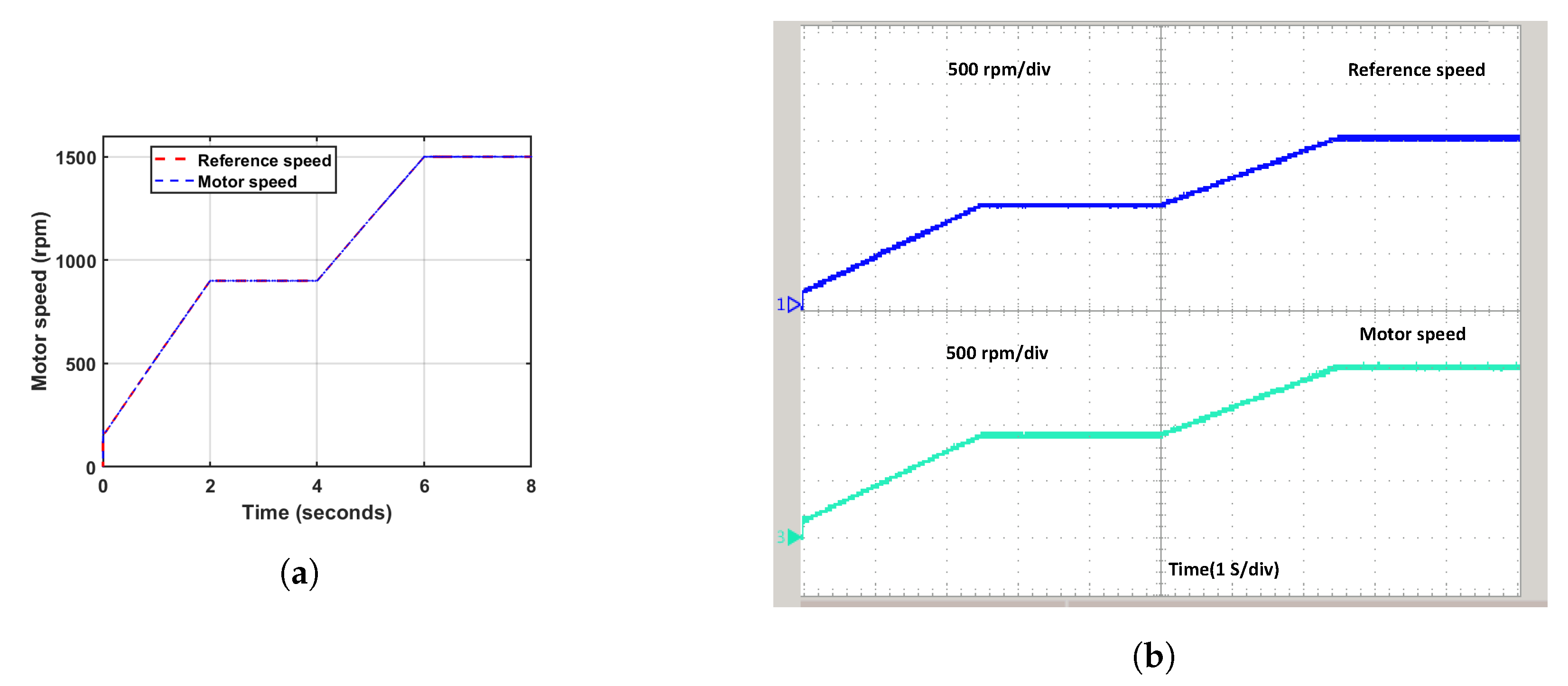
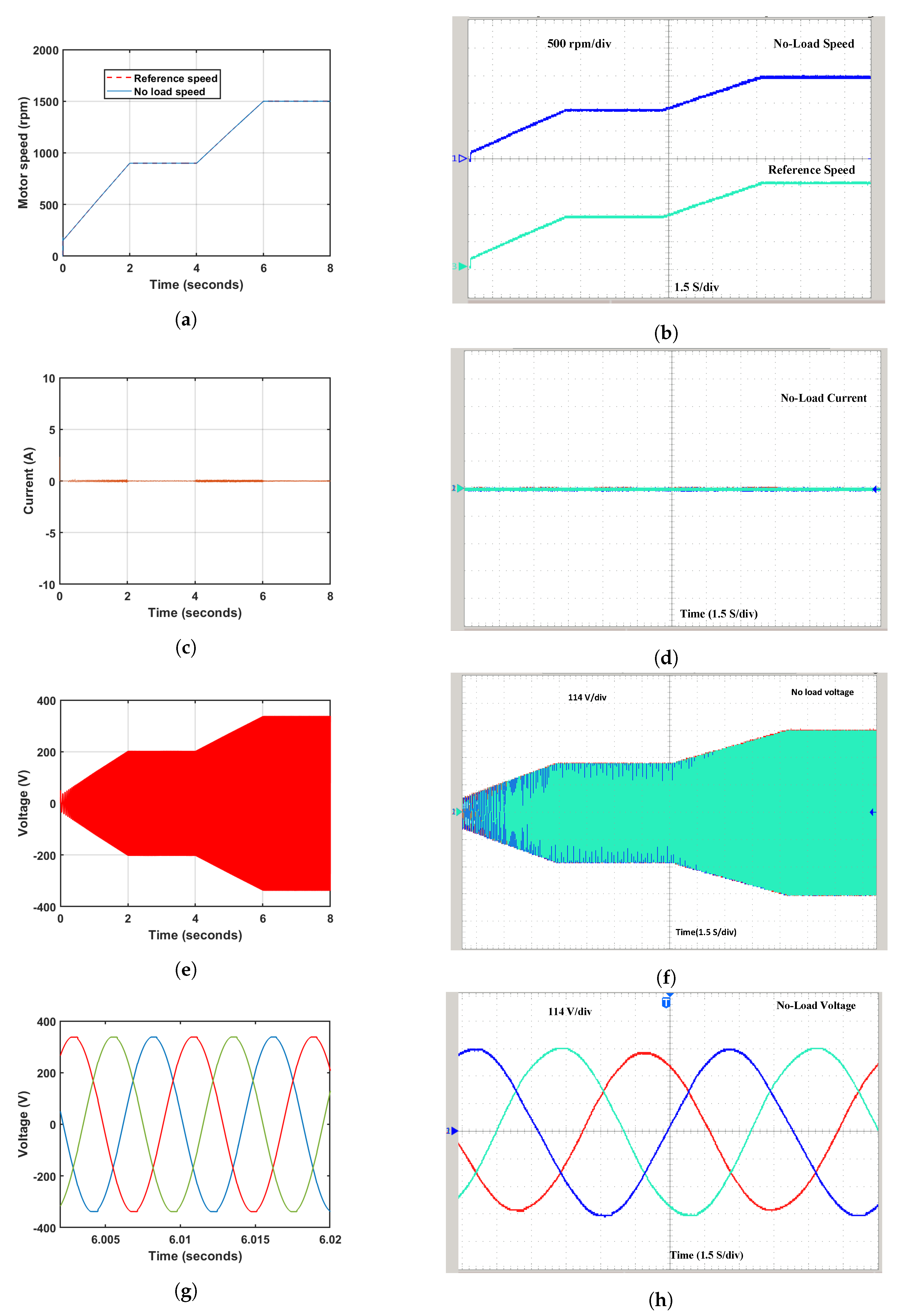
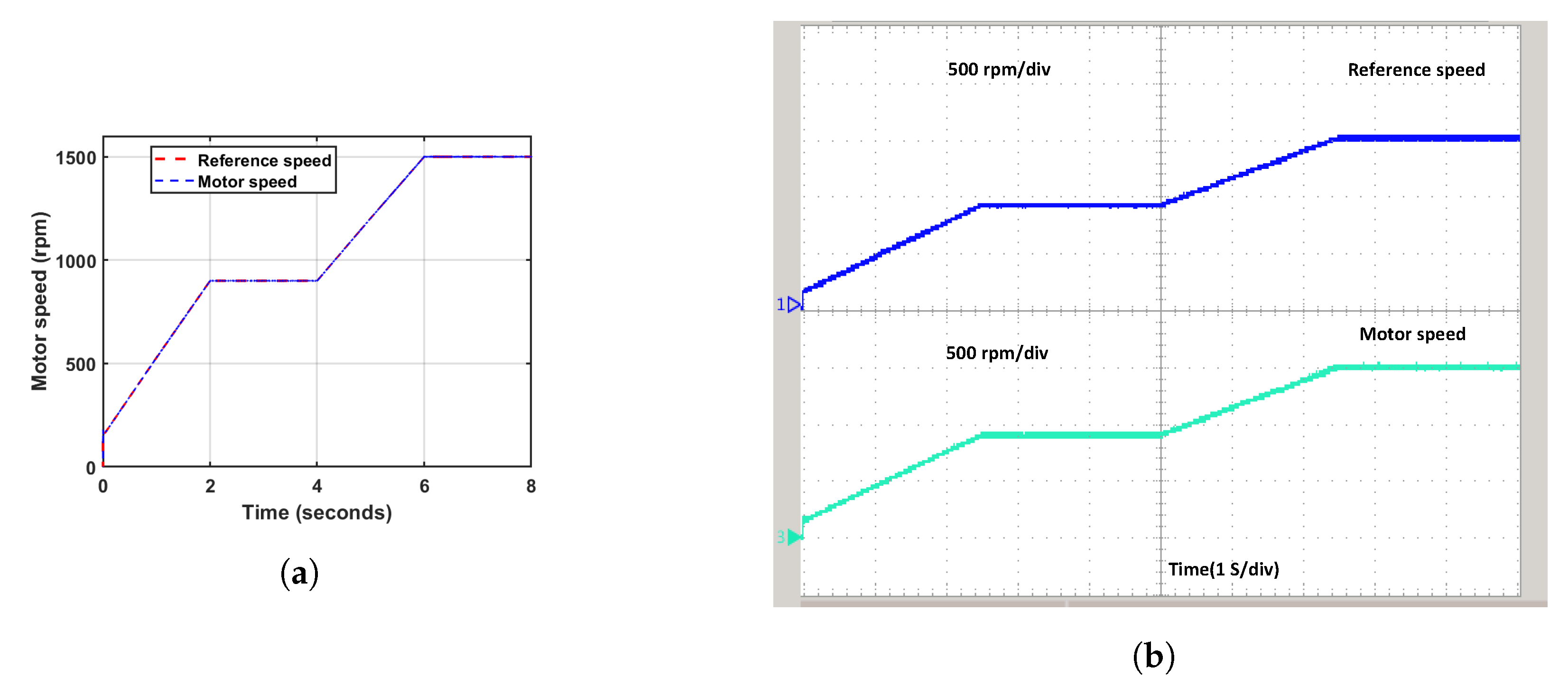
4.2. No-Load Test Analysis
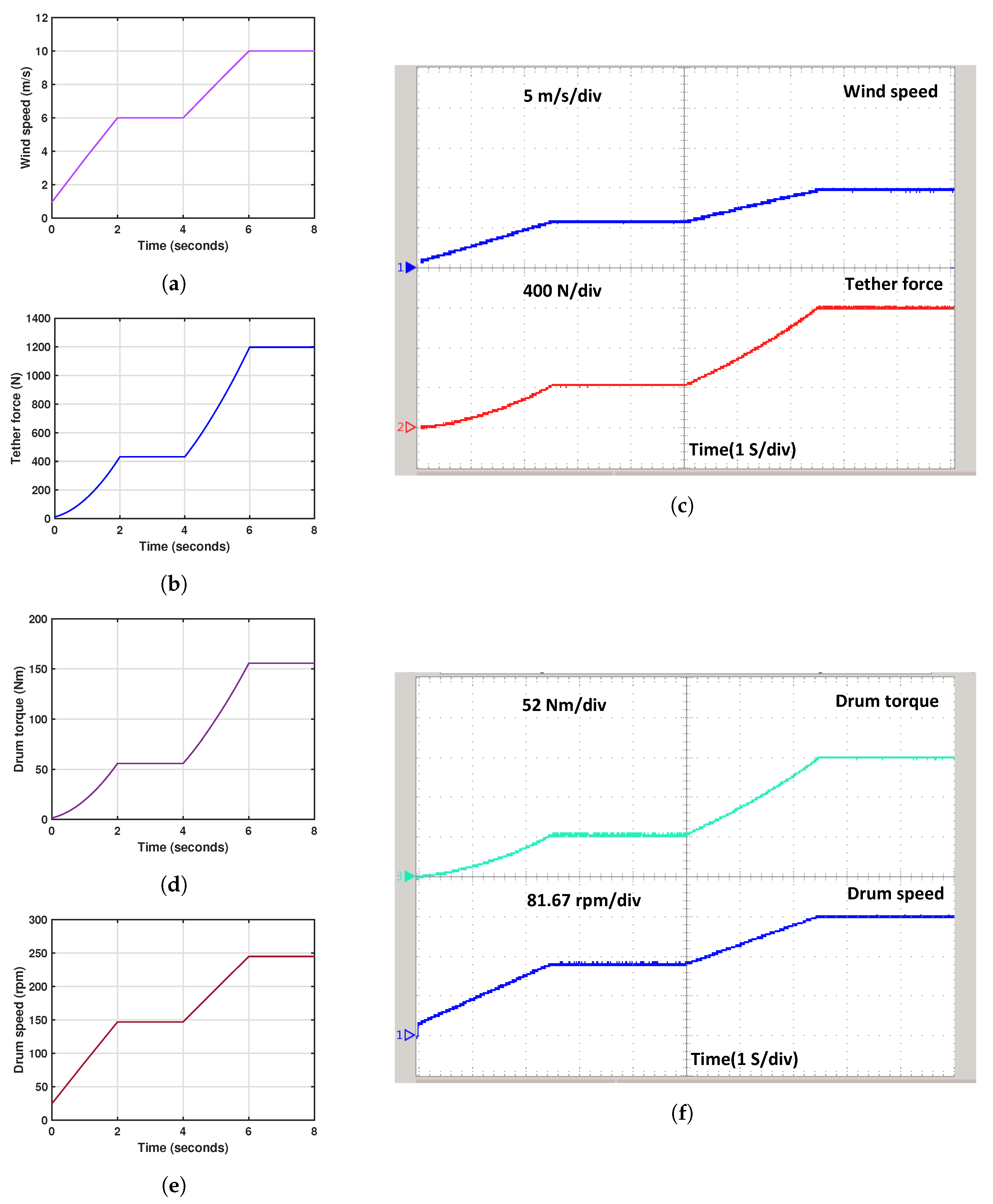
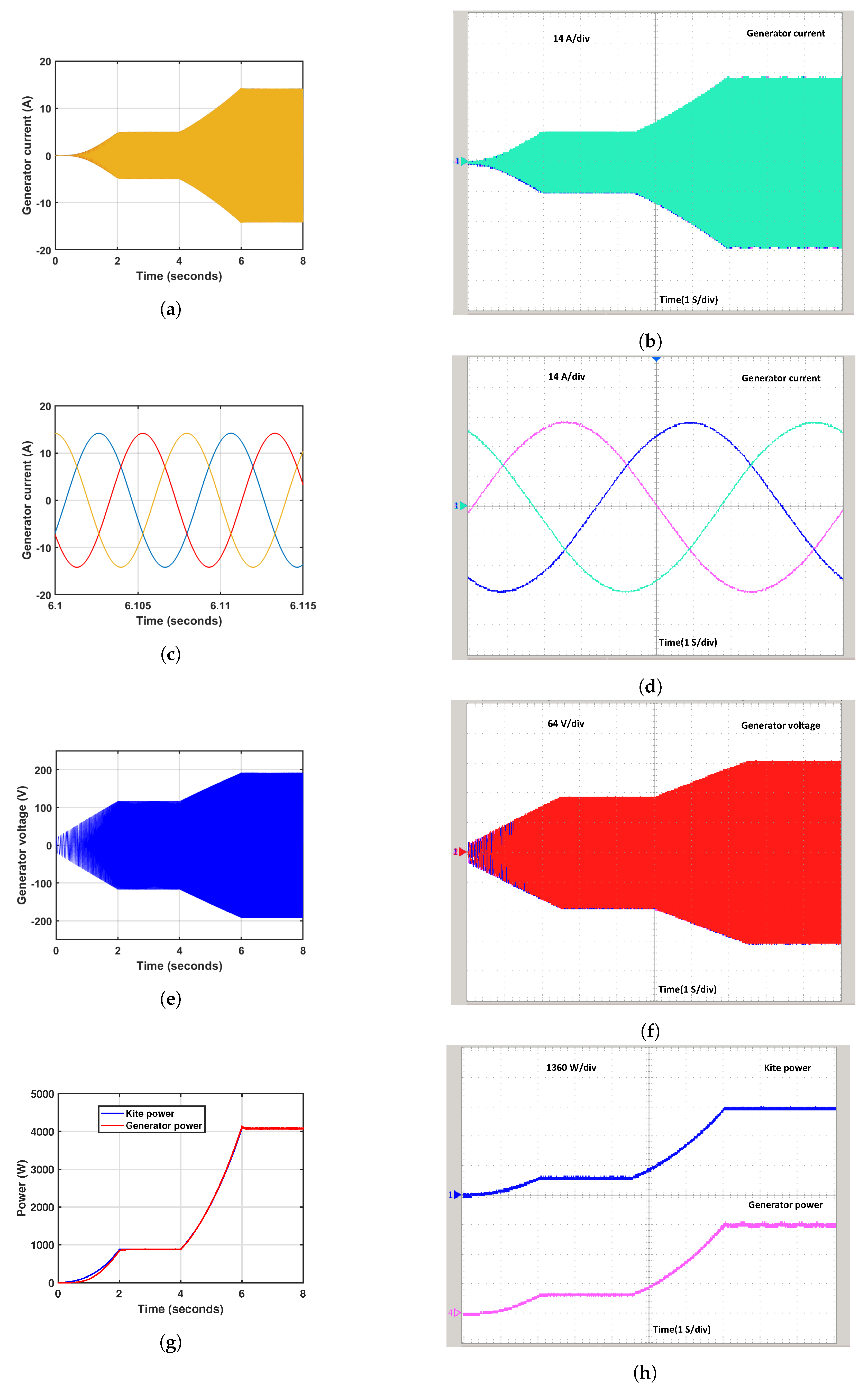
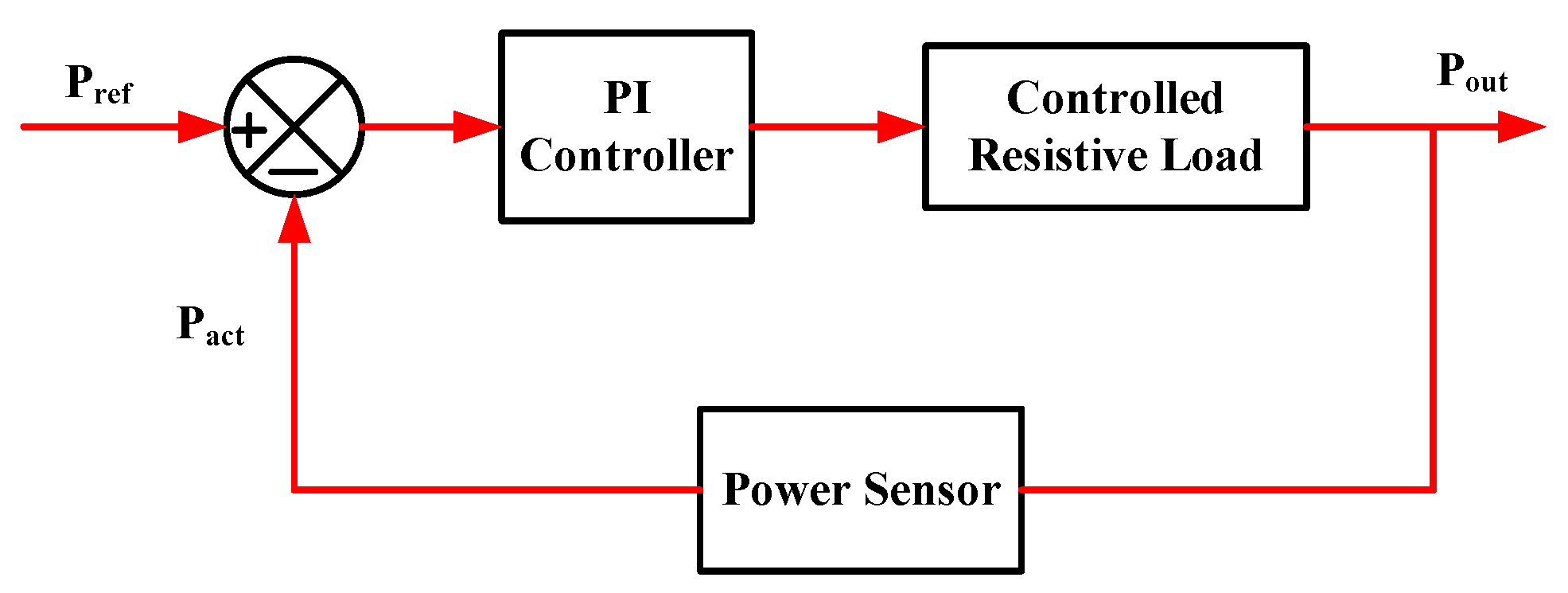
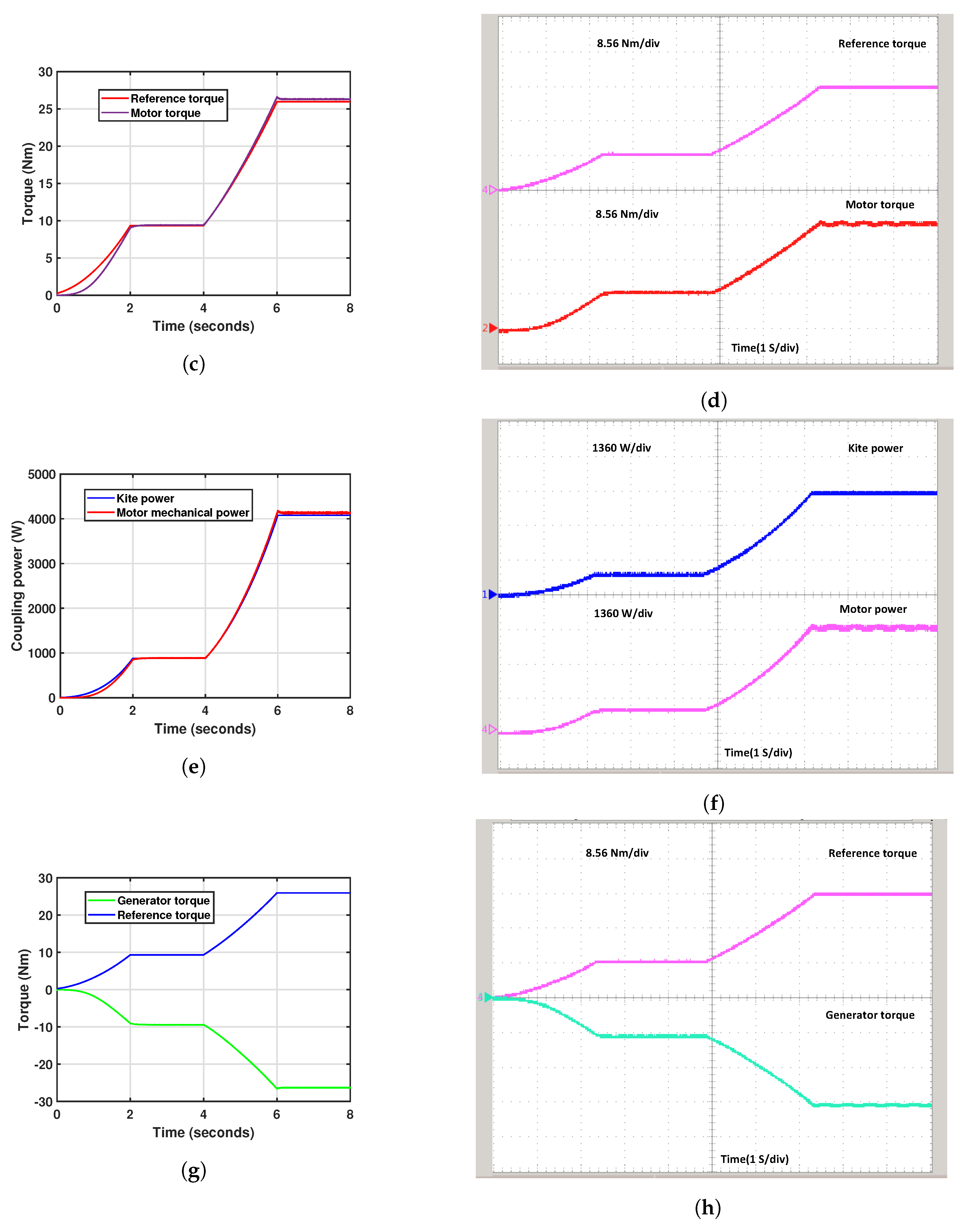
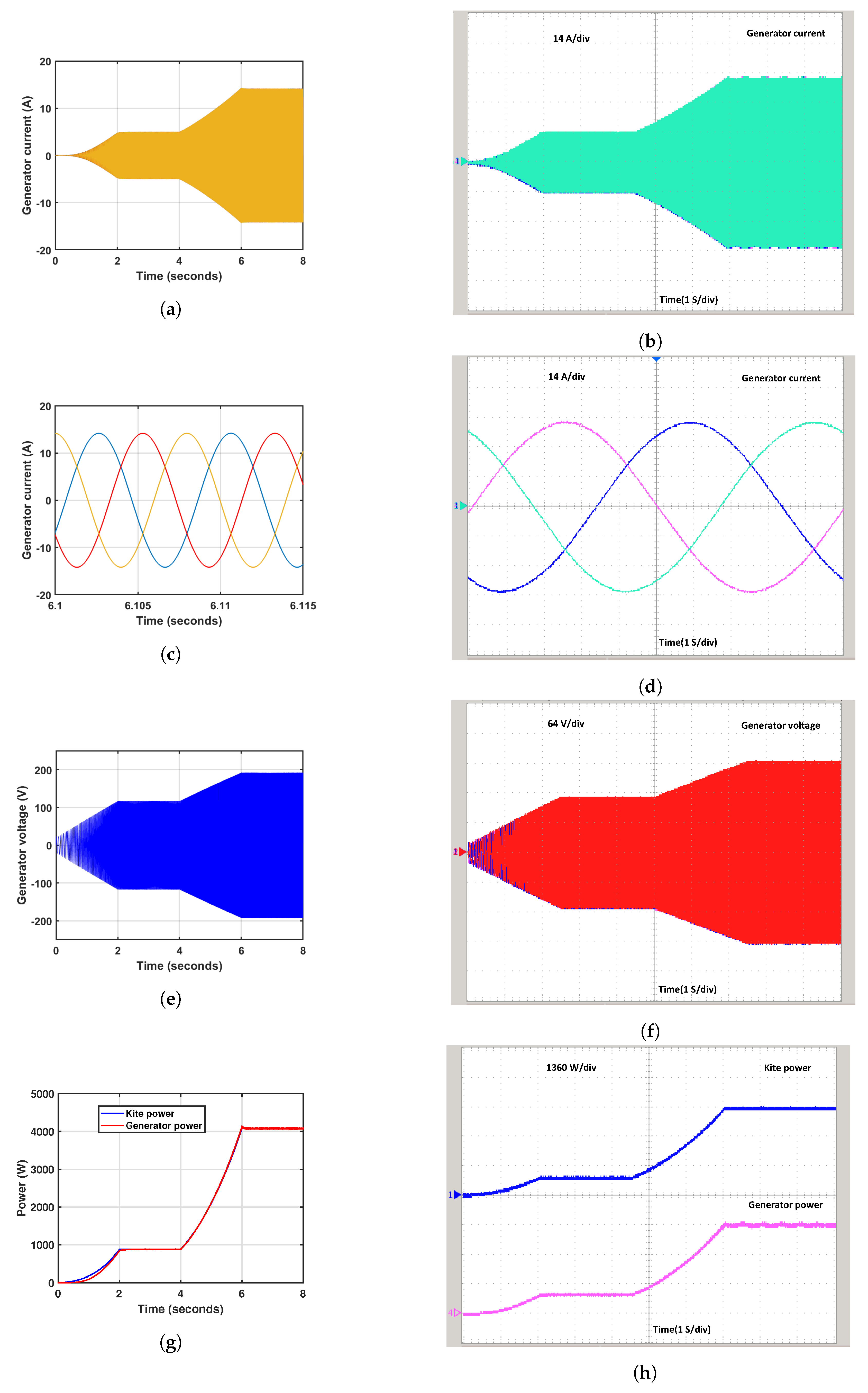
4.3. On-Load Test Analysis
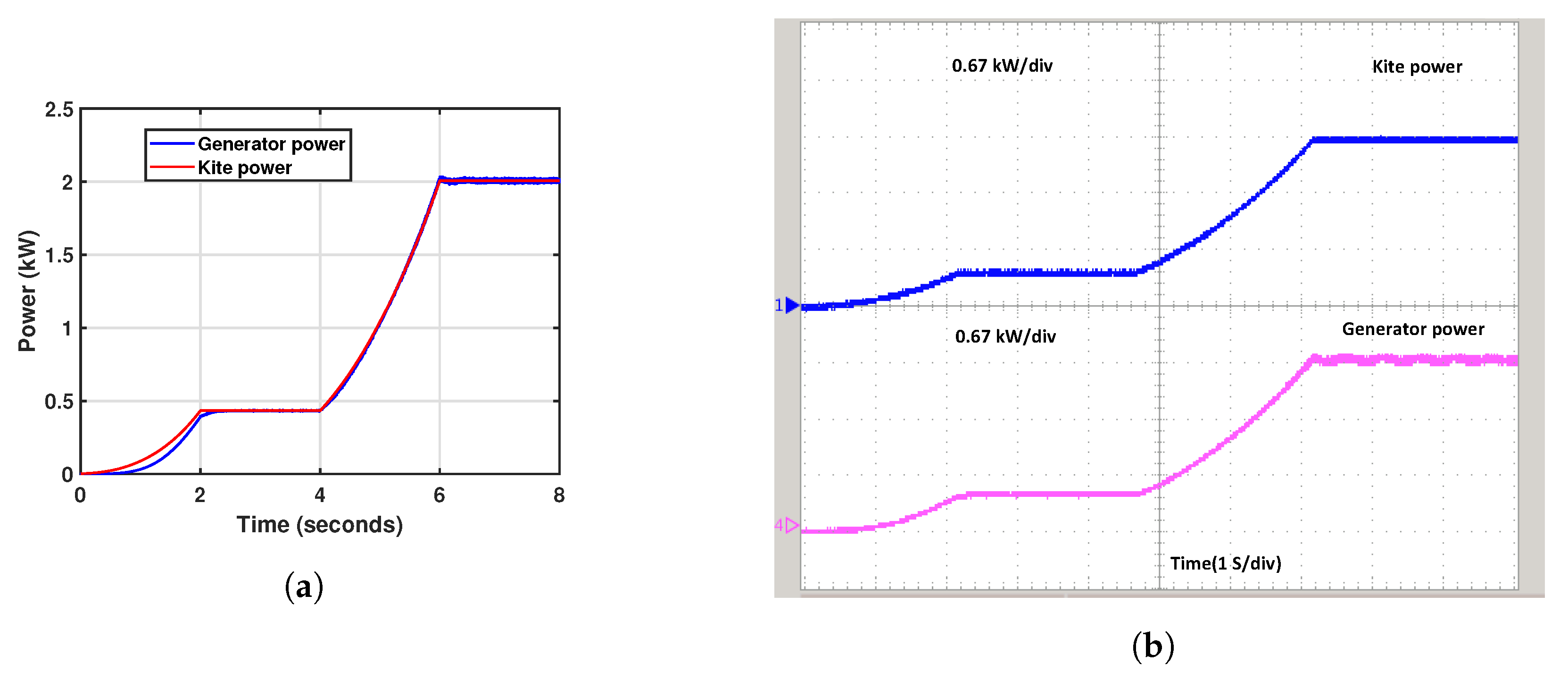
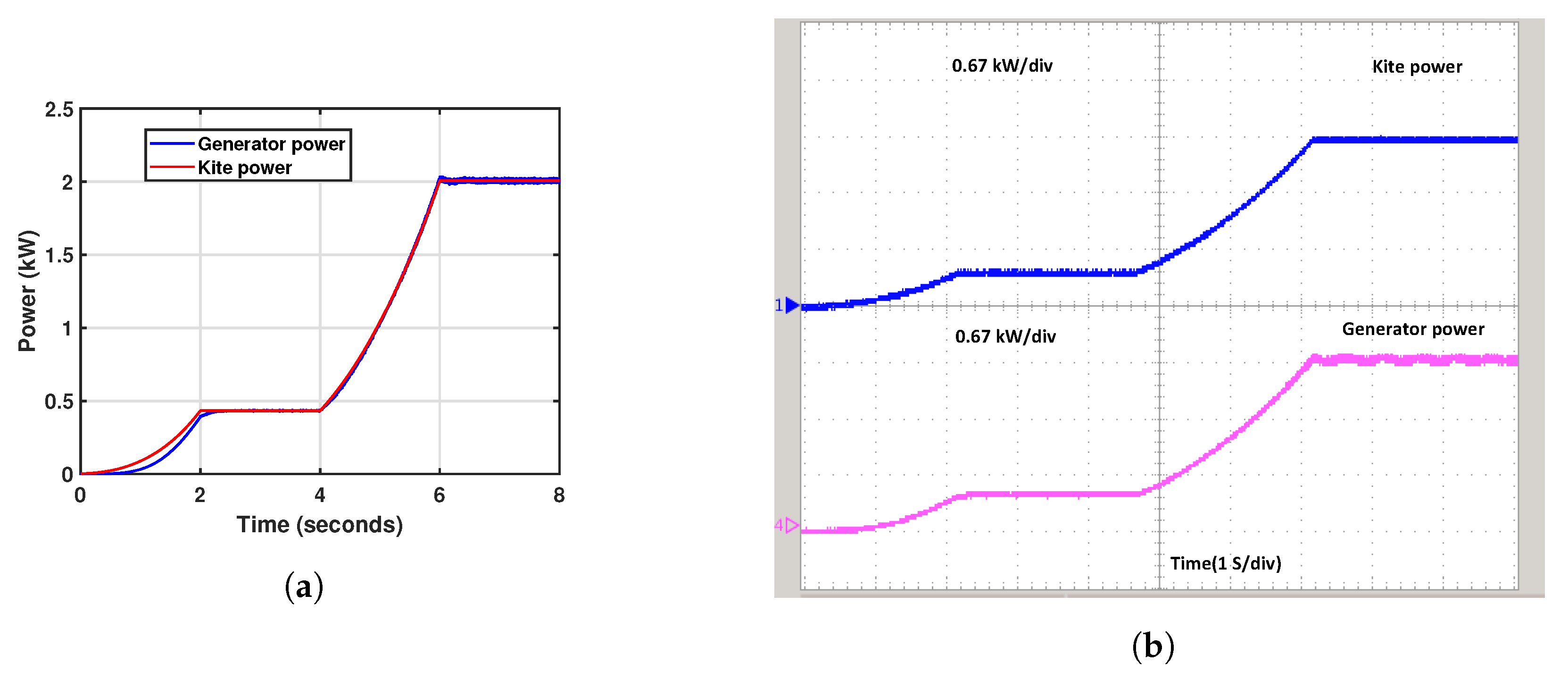
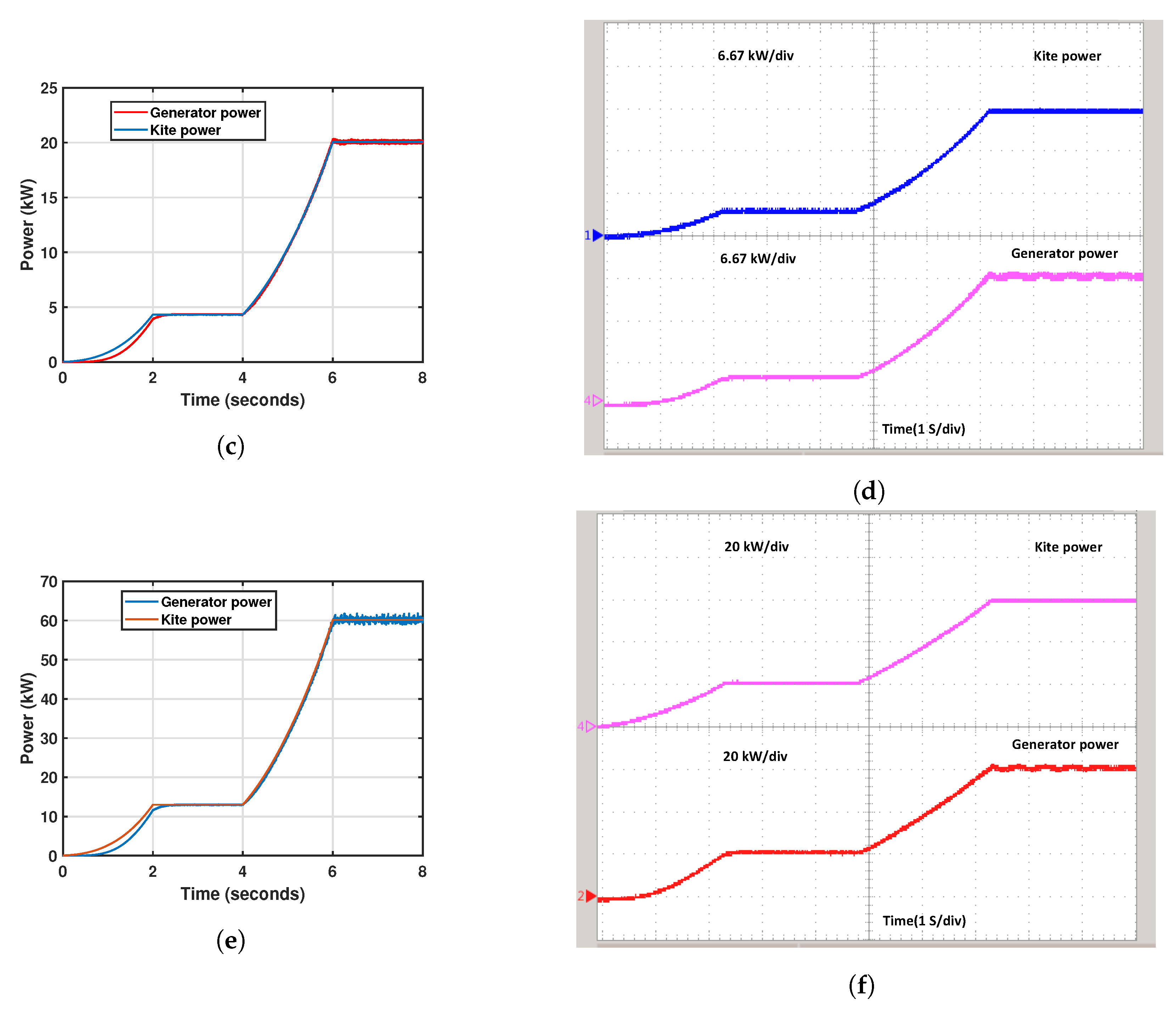
4.4. Three Different Power Rating Adaptabilities at Generator Terminal
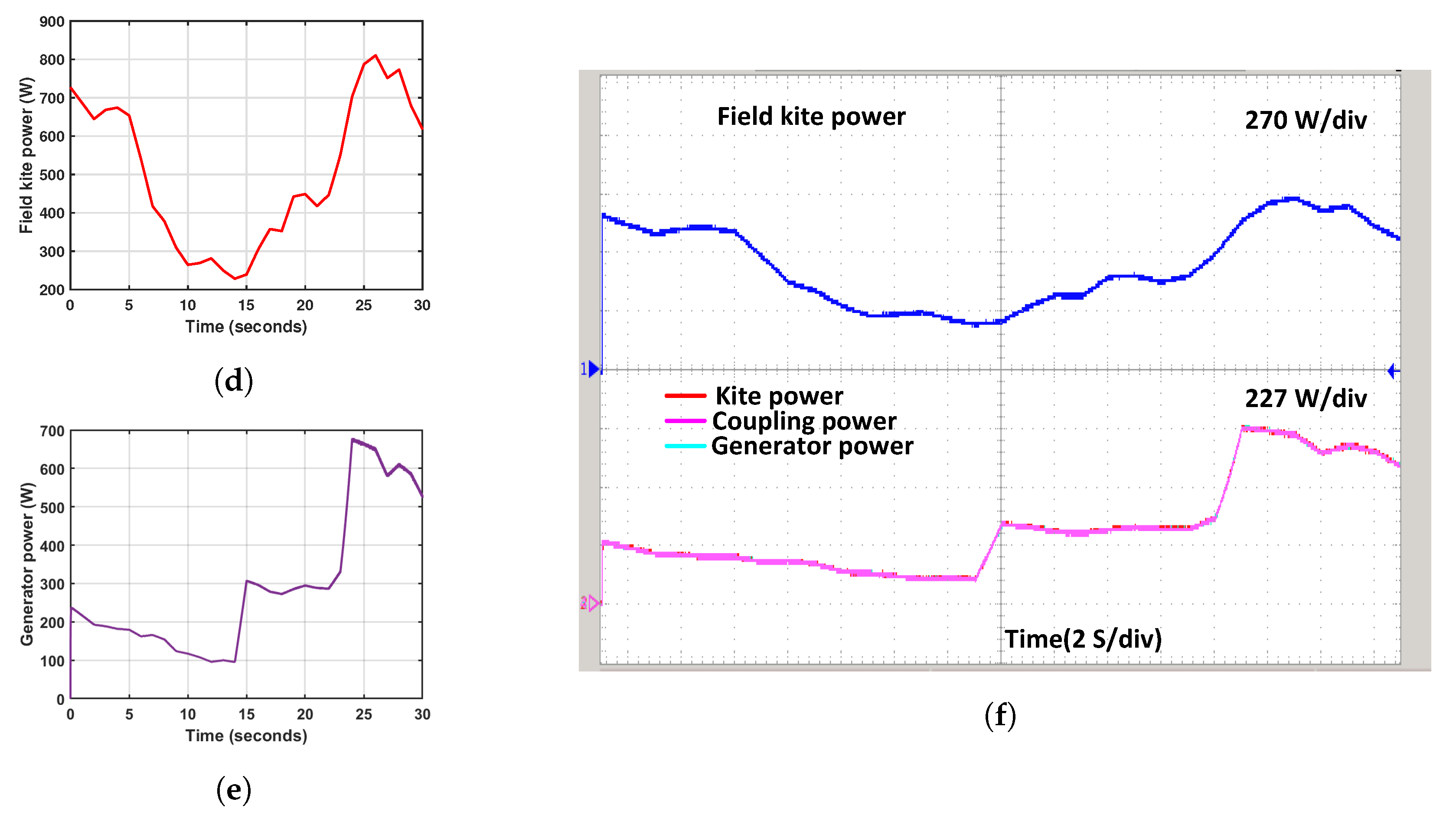
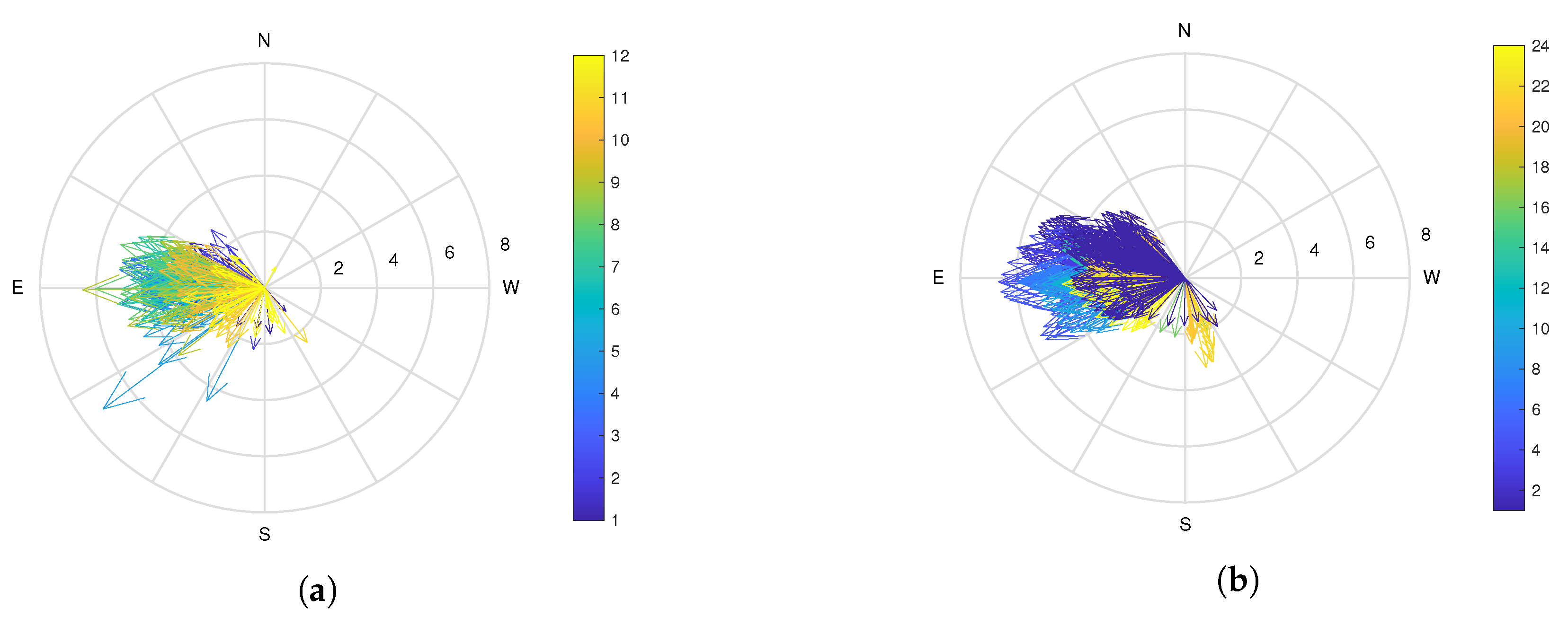
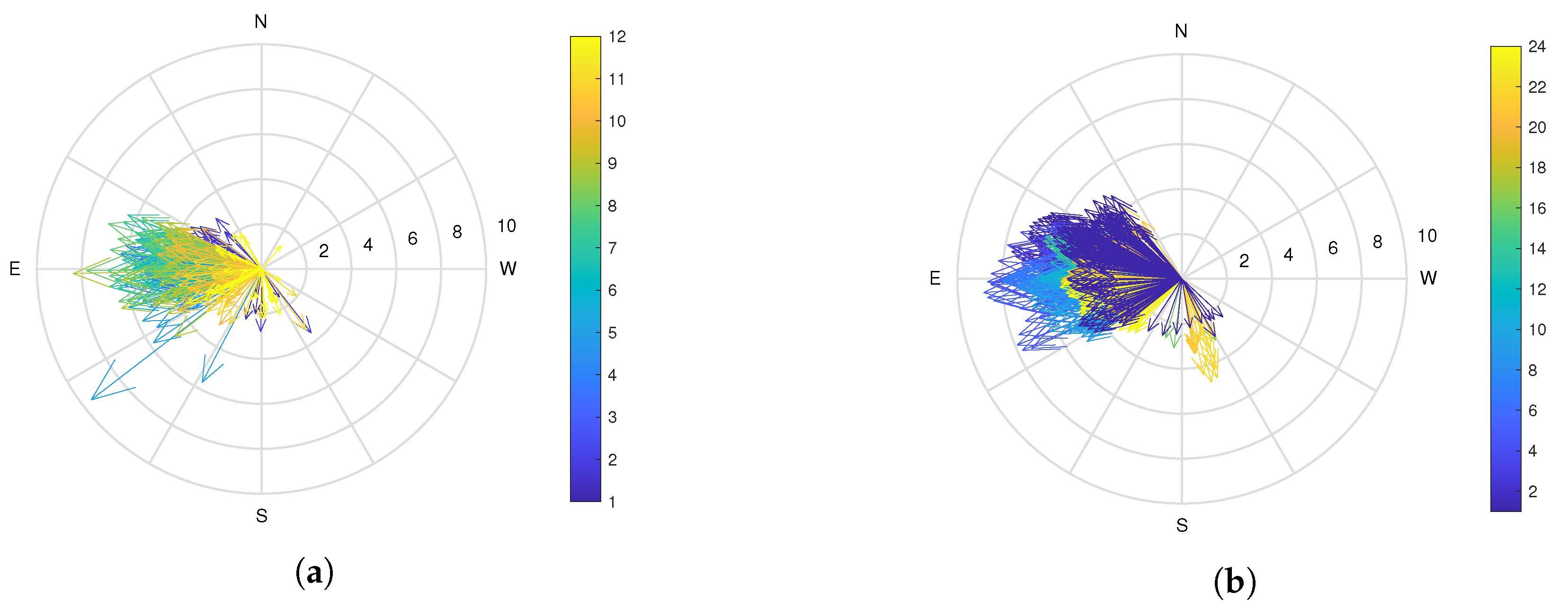
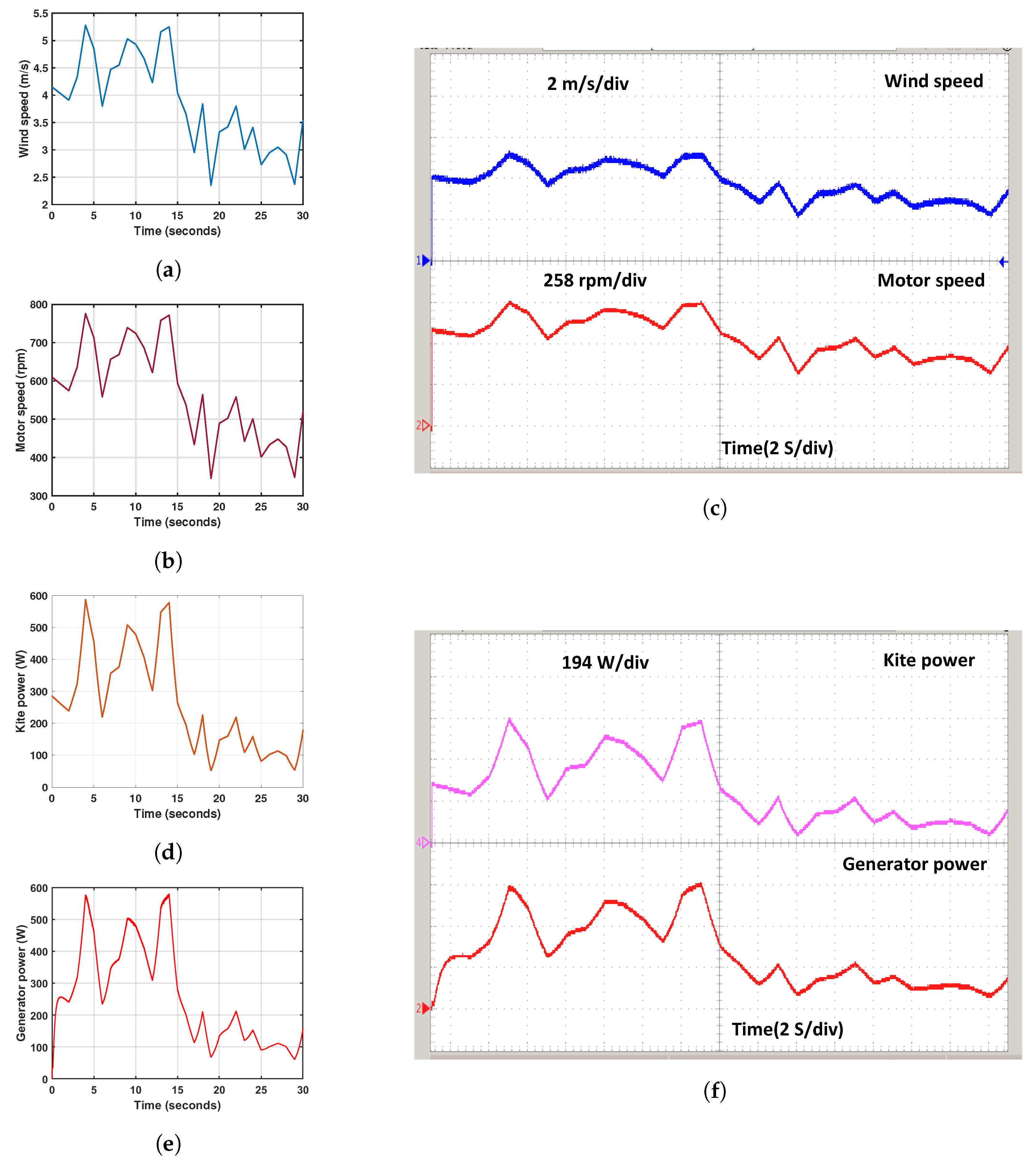
4.5. Field Test Wind Data Analysis
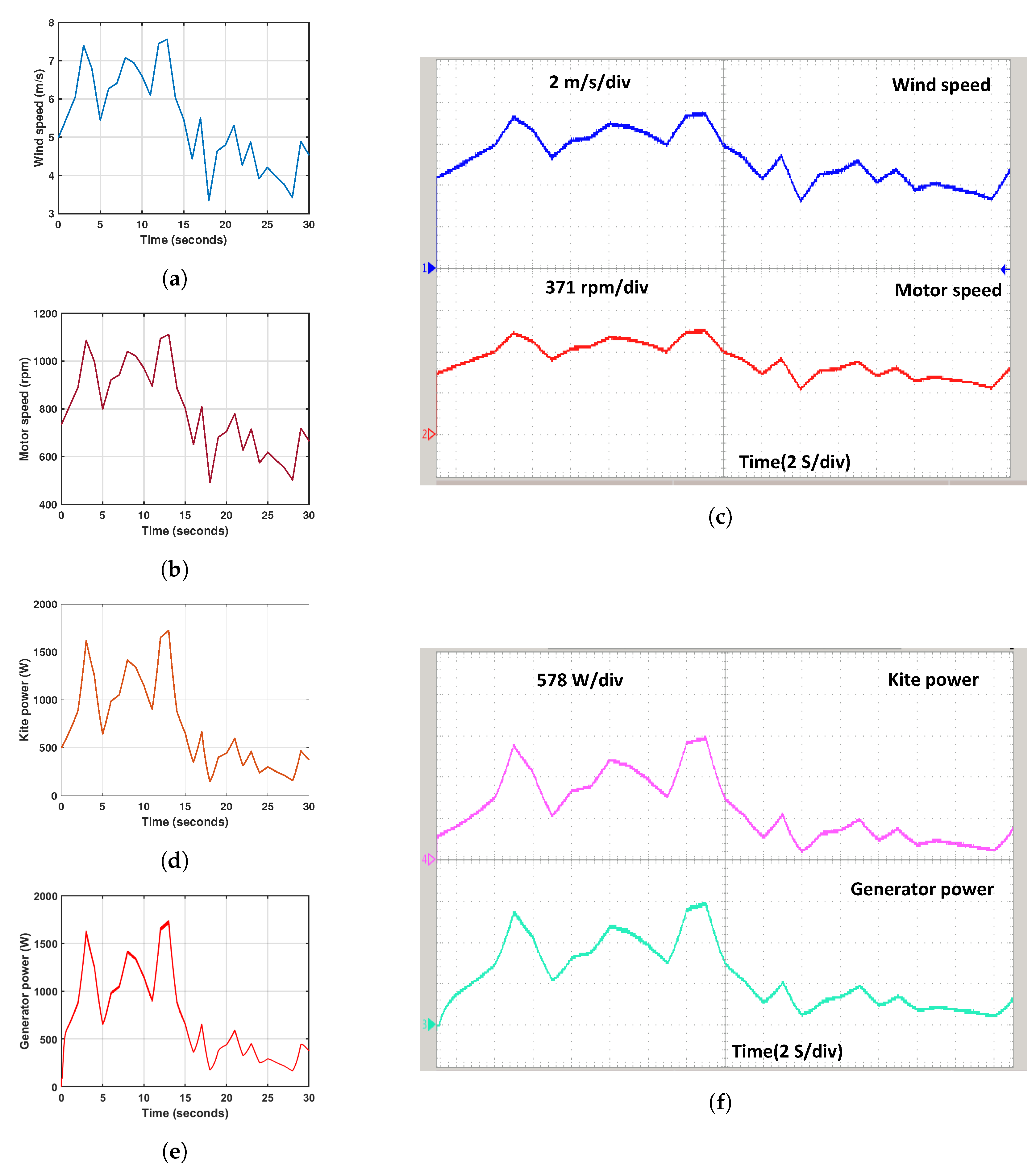
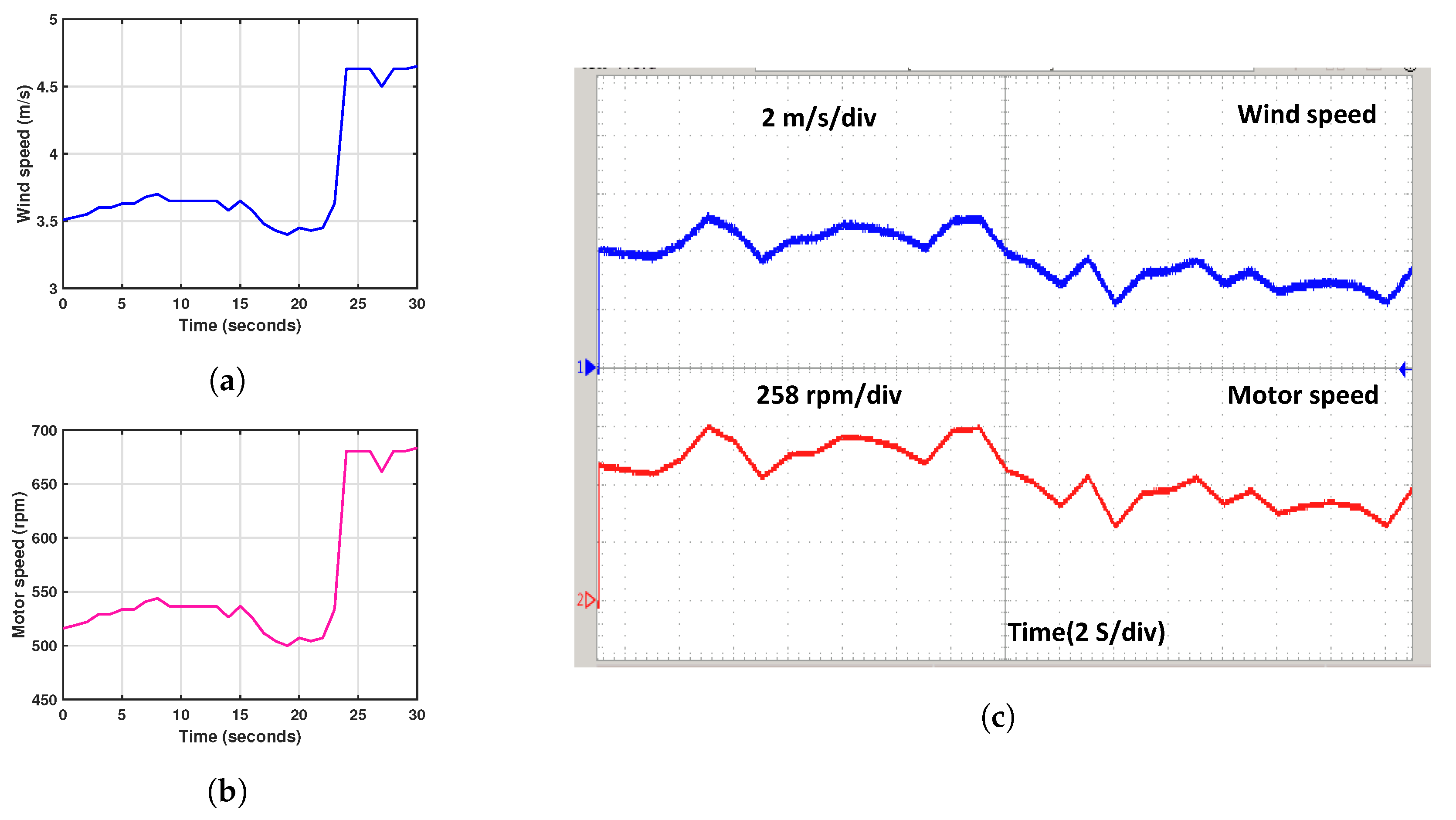
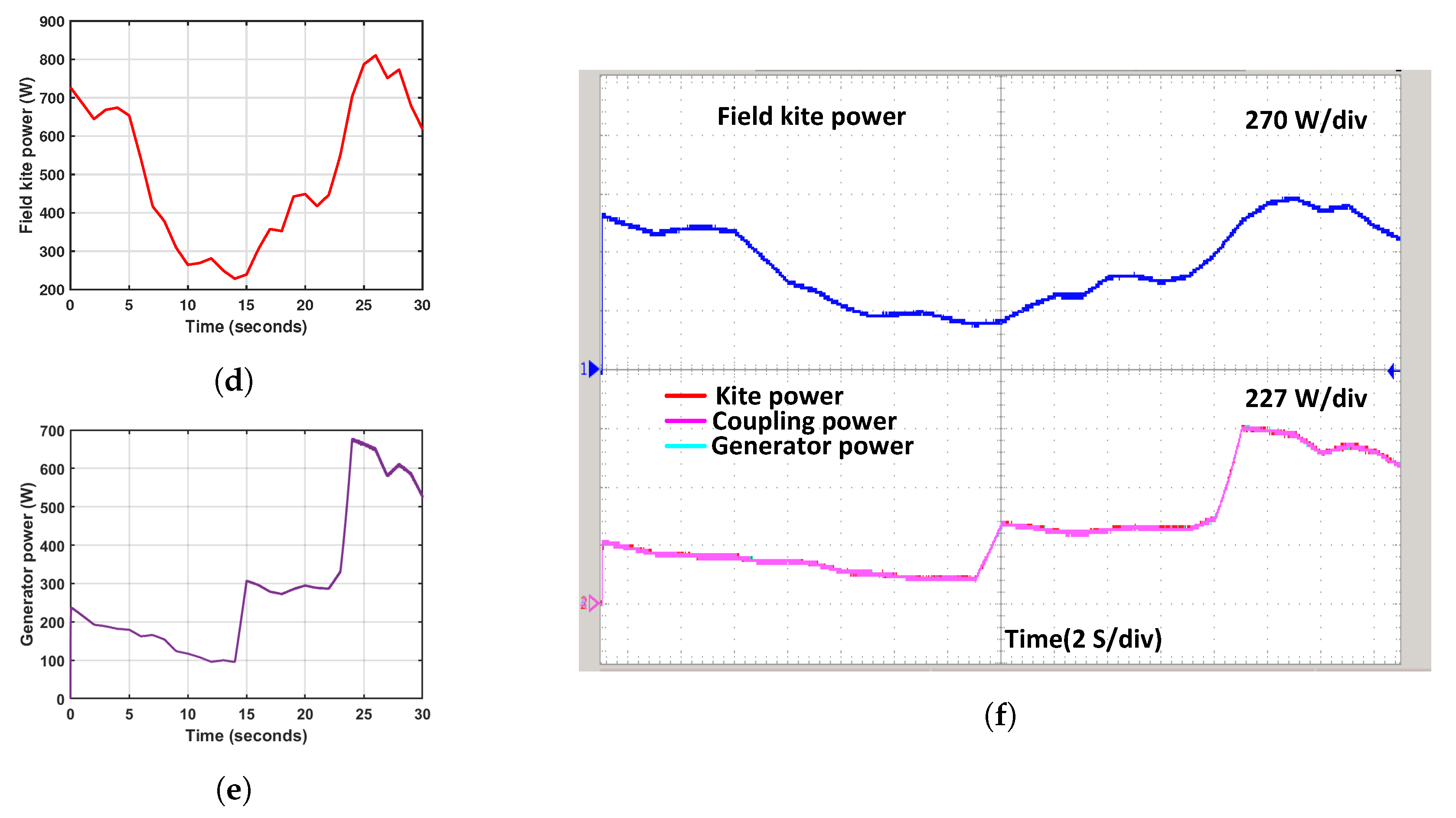
4.5.1. Validation Using Satellite Wind Data
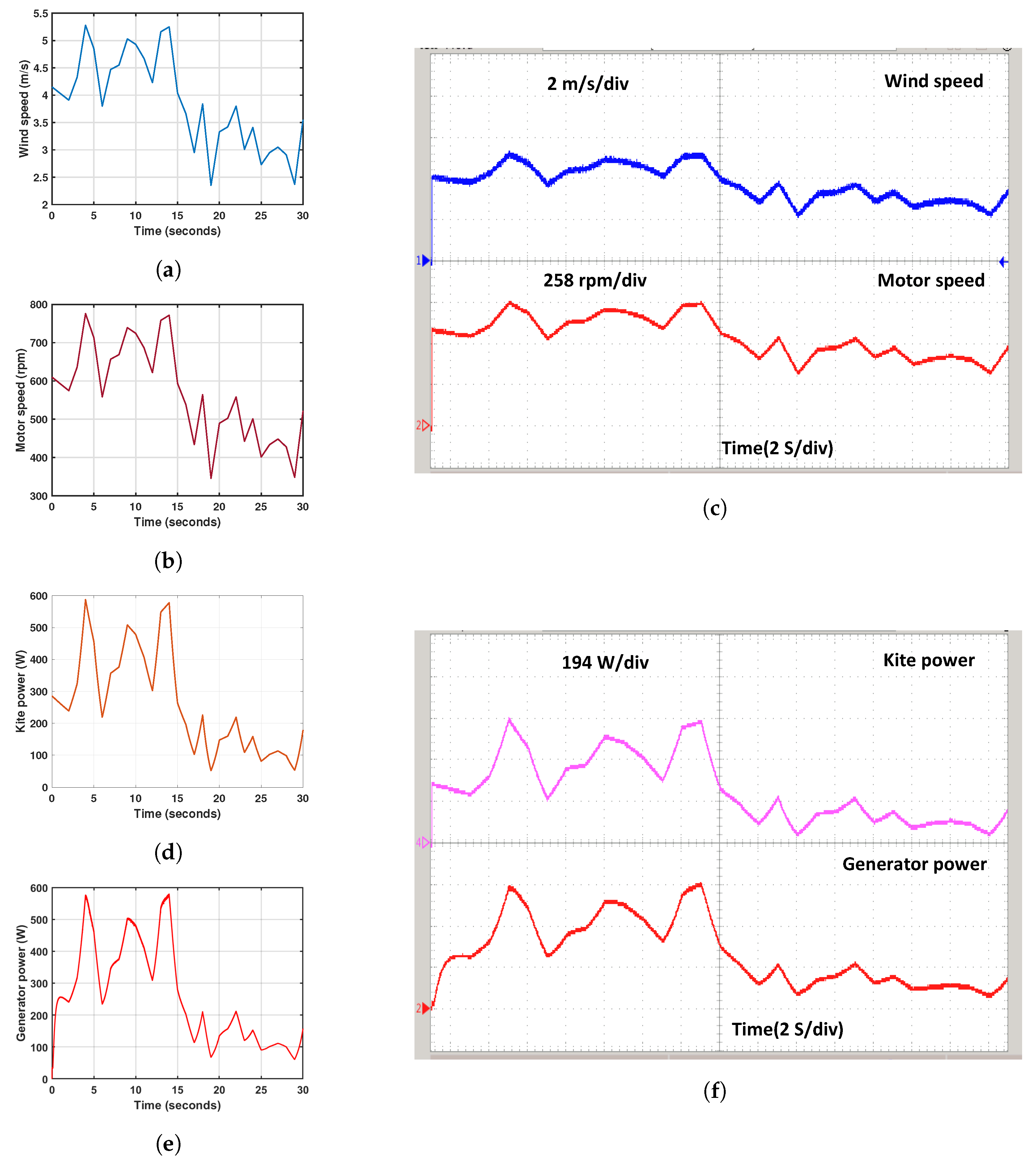
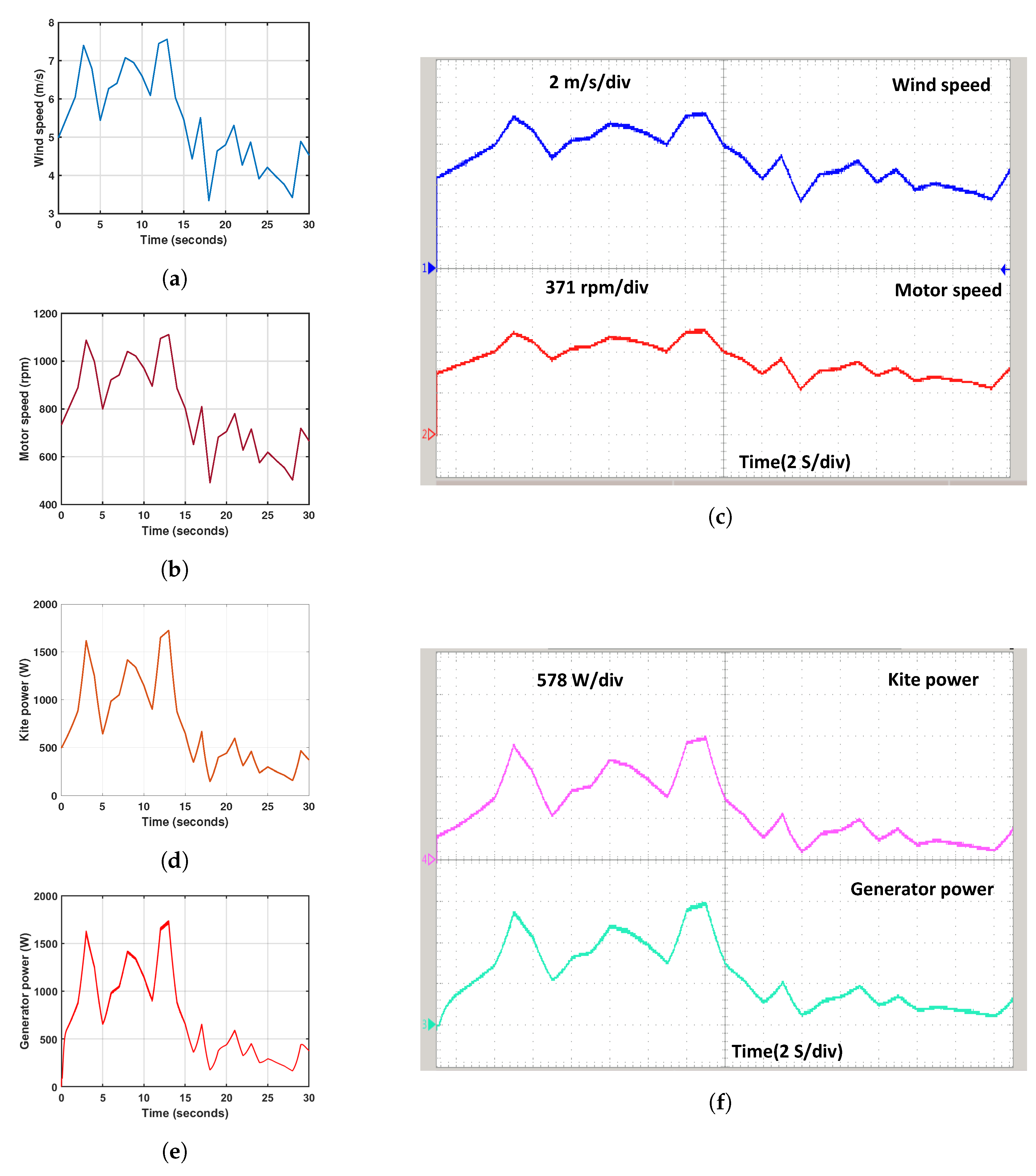
4.5.2. Validation Using Experimental Ground Wind Data
5. Conclusions
- The LAWECS emulator provides researchers with a cost-effective solution by offering a different range of kite sizes and adjustable wind speed.
- The proposed emulator was successfully applied to simulate three power ratings of 2 kW, 20 kW, and 60 kW at the generator terminal with kite surface areas of 5 m, 25 m, and 70 m, respectively.
- The emulator system based on PMSM demonstrates promising results in emulating the LAWECS with different wind speeds and kite areas.
- The wind velocity exhibited a range from 1 m/s to 10 m/s during both no-load and on-load-rated scenarios. The LAWECS was verified using experimental ground test data to evaluate the dynamic behaviour exhibited by the generator when subjected to on-load conditions.
- The proposed systems were validated in a real-time simulator environment using FPGA processor-based OPAL-RT. The system dynamics were compared between OPAL-RT and MATLAB SIMULINK, and it was observed that both exhibited identical responses.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Savino, M.M.; Manzini, R.; Della Selva, V.; Accorsi, R. A new model for environmental and economic evaluation of renewable energy systems: The case of wind turbines. Appl. Energy 2017, 189, 739–752. [Google Scholar] [CrossRef]
- de Graaf, T. International energy agency. In Handbook of Governance and Security; Edward Elgar Publishing: Cheltenham, UK, 2014; pp. 489–503. [Google Scholar]
- Musial, W.; Spitsen, P.; Beiter, P.; Duffy, P.; Marquis, M.; Cooperman, A.; Hammond, R.; Shields, M. Offshore Wind Market Report: 2021 Edition; Department of Energy: Washington, DC, USA, 2021. [Google Scholar]
- Ghosh, A.; Biswas, A.; Sharma, K.K.; Gupta, R. Computational analysis of flow physics of a combined three bladed Darrieus Savonius wind rotor. J. Energy Inst. 2015, 88, 425–437. [Google Scholar] [CrossRef]
- Ackermann, T.; Söder, L. Wind energy technology and current status: A review. Renew. Sustain. Energy Rev. 2000, 4, 315–374. [Google Scholar] [CrossRef]
- World Energy Outlook 2021; Technical Report. 2021. Available online: https://www.iea.org/reports/world-energy-outlook-2021 (accessed on 5 July 2023).
- Cherubini, A.; Papini, A.; Vertechy, R.; Fontana, M. Airborne Wind Energy Systems: A review of the technologies. Renew. Sustain. Energy Rev. 2015, 51, 1461–1476. [Google Scholar] [CrossRef]
- Salari, M.E.; Coleman, J.; Toal, D. Airborne Wind Energy—A Review. In Proceedings of the 3rd International Congress on Energy Efficiency and Energy Related Materials (ENEFM2015), Oludeniz, Turkey, 19–23 October 2015; p. 81. [Google Scholar]
- Cherubini, A.; Vertechy, R.; Fontana, M. Simplified model of offshore airborne wind energy converters. Renew. Energy 2016, 88, 465–473. [Google Scholar] [CrossRef]
- Kolar, J.W.; Friedli, T.; Krismer, F.; Looser, A.; Schweizer, M.; Friedemann, R.A.; Steimer, P.K.; Bevirt, J.B. Conceptualization and multiobjective optimization of the electric system of an airborne wind turbine. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 73–103. [Google Scholar] [CrossRef]
- Loyd, M.L. Crosswind kite power for large-scale wind power production. Energy 1980, 4, 106–111. [Google Scholar] [CrossRef]
- Pereira, A.F.; Sousa, J.M. A Review on Crosswind Airborne Wind Energy Systems: Key Factors for a Design Choice. Energies 2022, 16, 351. [Google Scholar] [CrossRef]
- Poland, J.A.; Schmehl, R. Modelling Aero-Structural Deformation of Flexible Membrane Kites. Energies 2023, 16, 5264. [Google Scholar] [CrossRef]
- Porta Ko, A.; Smidt, S.; Schmehl, R.; Mandru, M. Optimisation of a Multi-Element Airfoil for a Fixed-Wing Airborne Wind Energy System. Energies 2023, 16, 3521. [Google Scholar] [CrossRef]
- Todeschini, D.; Fagiano, L.; Micheli, C.; Cattano, A. Control of a rigid wing pumping airborne wind energy system in all operational phases. Control. Eng. Pract. 2021, 111, 104794. [Google Scholar] [CrossRef]
- Ali, Q.S.; Kim, M.H. Power conversion performance of airborne wind turbine under unsteady loads. Renew. Sustain. Energy Rev. 2022, 153, 111798. [Google Scholar] [CrossRef]
- Salari, M.E.; Coleman, J.; O’Donnell, C.; Toal, D. Experimental rig investigation of a direct interconnection technique for airborne wind energy systems. Int. J. Electr. Power Energy Syst. 2020, 123, 106300. [Google Scholar] [CrossRef]
- Licitra, G.; Koenemann, J.; Bürger, A.; Williams, P.; Ruiterkamp, R.; Diehl, M. Performance assessment of a rigid wing Airborne Wind Energy pumping system. Energy 2019, 173, 569–585. [Google Scholar] [CrossRef]
- Zillmann, U.; Bechtle, P. Emergence and economic dimension of airborne wind energy. In Airborne Wind Energy: Advances in Technology Development and Research; Springer: Berlin/Heidelberg, Germany, 2018; pp. 1–25. [Google Scholar]
- Fagiano, L.; Nguyen-Van, E.; Rager, F.; Schnez, S.; Ohler, C. Autonomous takeoff and flight of a tethered aircraft for airborne wind energy. IEEE Trans. Control. Syst. Technol. 2017, 26, 151–166. [Google Scholar] [CrossRef]
- Costello, S.; Franois, G.; Bonvin, D. Crosswind kite control—A benchmark problem for advanced control and dynamic optimization. Eur. J. Control. 2017, 35, 1–10. [Google Scholar] [CrossRef]
- Costello, S.; François, G.; Bonvin, D. Real-time optimizing control of an experimental crosswind power kite. IEEE Trans. Control. Syst. Technol. 2017, 26, 507–522. [Google Scholar] [CrossRef]
- Ahmed, M.S.; Hably, A.; Bacha, S. Kite generator system modeling and grid integration. IEEE Trans. Sustain. Energy 2013, 4, 968–976. [Google Scholar] [CrossRef]
- Erhard, M.; Strauch, H. Flight control of tethered kites in autonomous pumping cycles for airborne wind energy. Control. Eng. Pract. 2015, 40, 13–26. [Google Scholar] [CrossRef]
- Tammaruckwattana, S.; Ohyama, K.; Yue, C. Experimental assessment with wind turbine emulator of variable-speed wind power generation system using boost chopper circuit of permanent magnet synchronous generator. J. Power Electron. 2015, 15, 246–255. [Google Scholar] [CrossRef]
- Martinez, F.; Herrero, L.C.; de Pablo, S. Open loop wind turbine emulator. Renew. Energy 2014, 63, 212–221. [Google Scholar] [CrossRef]
- O’Gairbhith, C. Assessing the Viability of High Altitude Wind Resources in Ireland; Loughborough University: Loughborough, UK, 2009; Available online: http://carbontracking.com/reports/ (accessed on 6 July 2023).
- Boccard, N. Capacity factor of wind power realized values vs. estimates. Energy Policy 2009, 37, 2679–2688. [Google Scholar] [CrossRef]
- Kumar, R.; Zhu, Z.Q.; Duke, A.; Thomas, A.; Clark, R.; Azar, Z.; Wu, Z.Y. A review on transverse flux permanent magnet machines for wind power applications. IEEE Access 2020, 8, 216543–216565. [Google Scholar] [CrossRef]
- Bao, G.; Qi, W.; He, T. Direct torque control of PMSM with modified finite set model predictive control. Energies 2020, 13, 234. [Google Scholar] [CrossRef]
- Saberi, S.; Rezaie, B. Direct model predictive speed control strategy for a PMSM fed by a three-level NPC converter. J. Energy Manag. Technol. 2021, 5, 1–7. [Google Scholar]
- Vijayapriya, R.; Raja, P.; Selvan, M.P. Enhanced method of rotor speed and position estimation of permanent magnet synchronous Machine based on stator SRF-PLL. Eng. Sci. Technol. Int. J. 2017, 20, 1450–1459. [Google Scholar] [CrossRef]
- Abdallah, M.E.; Arafa, O.M.; Shaltot, A.; Aziz, G.A.A. Wind turbine emulation using permanent magnet synchronous motor. J. Electr. Syst. Inf. Technol. 2018, 5, 121–134. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Ma, K. Future on power electronics for wind turbine systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 139–152. [Google Scholar] [CrossRef]
- Chen, J.; Chen, J.; Gong, C.; Wang, H. Design and analysis of dynamic wind turbine simulator for wind energy conversion system. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 971–977. [Google Scholar]
- Kali, Y.; Saad, M.; Bouchama, A.; Dehbozorgi, R.; Paquin, J.N.; Gregoire, L.A.; Bélanger, J.; Rodas, J. HIL simulation of on-line parameters estimation and current control of a six-phase induction machine using OPAL-RT technologies. In Proceedings of the 2020 IEEE Power & Energy Society General Meeting (PESGM), Montreal, QC, Canada, 2–6 August 2020; pp. 1–5. [Google Scholar]
- Nath, S.R.; Bose, K.; Purkait, P. Real Time Hardware in Loop (HIL) Implementation and Control of Wind Generator. In Proceedings of the 2022 IEEE 6th International Conference on Condition Assessment Techniques in Electrical Systems (CATCON), Durgapur, India, 17–19 December 2022; pp. 171–176. [Google Scholar]
- Khan, M.J.; Mathew, L. Comparative analysis of maximum power point tracking controller for wind energy system. Int. J. Electron. 2018, 105, 1535–1550. [Google Scholar] [CrossRef]
- Tolbert, L.M.; Wang, F.; Tomsovic, K.; Sun, K.; Wang, J.; Ma, Y.; Liu, Y. Reconfigurable Real-Time Power Grid Emulator for Systems with High Penetration of Renewables. IEEE Open Access J. Power Energy 2020, 7, 489–500. [Google Scholar] [CrossRef]
- Texas A & M University at Qatar; Exxon Mobil Corporation; Institute of Electrical and Electronics Engineers. In Proceedings of the 2014 26th International Conference on Microelectronics (ICM), Doha, Qatar, 14–17 December 2014; p. 243. Available online: https://www.qatar.tamu.edu/news-and-events/news/Texas-A-M-University-at-Qatar-hosts-26th-International-Conference-on-Microelectronics-ICM-2014 (accessed on 5 July 2023).
- Gheisarnejad, M.; Khooban, M.H. Secondary load frequency control for multi-microgrids: HiL real-time simulation. Soft Comput. 2019, 23, 5785–5798. [Google Scholar] [CrossRef]
- Merabet, A.; Tawfique, K.A.; Islam, M.A.; Enebeli, S.; Beguenane, R. Wind turbine emulator using OPAL-RT real-time HIL/RCP laboratory. In Proceedings of the 2014 26th International Conference on Microelectronics (ICM), Doha, Qatar, 14–17 December 2014; pp. 192–195. [Google Scholar]
- Castelino, R.V.; Kumar, P.; Kashyap, Y.; Karthikeyan, A.; Sharma, K.M.; Karmakar, D.; Kosmopoulos, P. Exploring the Potential of Kite-Based Wind Power Generation: An Emulation-Based Approach. Energies 2023, 16, 5213. [Google Scholar] [CrossRef]
- Coleman, J.; Ahmad, H.; Pican, E.; Toal, D. Non-reversing generators in a novel design for pumping mode airbornewind energy farm. Airborne Wind. Energy 2013, 587–597. [Google Scholar]
- Ahmed, M.; Hably, A.; Bacha, S.; Ovalle, A. Kite generator system: Grid integration and validation. In Proceedings of the IECON 2014—40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 2139–2145. [Google Scholar]
- Doe, M. Niche Strategy Selection for Kite-Based Airborne Wind Energy Technologies. 2014. Available online: https://repository.tudelft.nl/islandora/object/uuid:bc413359-67f3-4872-a514-9dedd825ec9d (accessed on 5 July 2023).
- Suman, K.; Mathew, A.T. Speed control of permanent magnet synchronous motor drive system using PI, PID, SMC and SMC plus PID controller. In Proceedings of the 2018 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Bangalore, India, 19–22 September 2018; pp. 543–549. [Google Scholar]
- Schmidt, E.; de Oliveira, M.D.L.C.; da Silva, R.S.; Fagiano, L.; Neto, A.T. In-flight estimation of the aerodynamics of tethered wings for airborne wind energy. IEEE Trans. Control. Syst. Technol. 2019, 28, 1309–1322. [Google Scholar] [CrossRef]
- van der Vlugt, R.; Bley, A.; Noom, M.; Schmehl, R. Quasi-steady model of a pumping kite power system. Renew. Energy 2019, 131, 83–99. [Google Scholar] [CrossRef]
- Castelino, R.V.; Kashyap, Y.; Kosmopoulos, P. Airborne Kite Tether Force Estimation and Experimental Validation Using Analytical and Machine Learning Models for Coastal Regions. Remote Sens. 2022, 14, 6111. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Castelino, R.V. et al., 2023 [43] | Proposed Work |
|---|---|---|
| Kite surface area | 2.5 m, 14 m, & 60 m | 5 m, 25 m & 70 m |
| Aerodynamic coefficient | 1.125, 2.875 & 3.825 | 1.965, 3.8265 & 4.235 |
| Wind speed | 2 m/s to 12.25 m/s | 1 m/s to 10 m/s |
| Different power ratings | 1 kW, 10 kW & 100 kW | 2 kW, 20 kW & 60 kW |
| Gear ratio | 5 | 6 |
| Satellite wind data | Month of August | Month of July |
| Parameter | 2 kW | 20 kW | 60 kW |
|---|---|---|---|
| Kite area | 5 m | 25 m | 70 m |
| Aerodynamic coefficient | 1.965 | 3.8265 | 4.235 |
| Wind speed | 1–10 m/s | 1–10 m/s | 1–10 m/s |
| Air density | 1.225 kg/m | 1.225 kg/m | 1.225 kg/m |
| Gear ratio | 6 | 6 | 6 |
| Rated voltage of machines | 375 V | 375 V | 375 V |
| Rated speed of machines | 1500 rpm | 1500 rpm | 1500 rpm |
| Pole pairs of machines | 4 | 4 | 4 |
| Maximum torque of machines | 12 Nm | 127 Nm | 382 Nm |
| Data Point | Yaw (Degrees) | Pitch (Degrees) | Roll (Degrees) | Altitude (m) | Tether Force (N) | Wind Speed (m/s) | Wind Direction (Degrees) |
|---|---|---|---|---|---|---|---|
| 1 | 50.67 | −132.16 | 47.98 | 2.20 | 491.79 | 3.60 | 18 |
| 2 | 48.36 | −136.11 | 51.89 | 3.10 | 494.61 | 3.55 | 15 |
| 3 | 45.95 | −144.10 | 53.98 | 5.80 | 462.71 | 3.57 | 10 |
| 4 | 47.20 | −148.21 | 55.08 | 6.50 | 473.03 | 3.62 | 9 |
| 5 | 48.22 | −150.19 | 45.78 | 8.30 | 471.85 | 3.63 | 12 |
| 6 | 52.35 | −152.20 | 36.56 | 9.20 | 461.11 | 3.64 | 14 |
| 7 | 54.91 | −154.99 | 30.14 | 11.10 | 382.05 | 3.64 | 7 |
| 8 | 56.08 | −155.99 | 26.23 | 11.50 | 292.12 | 3.70 | 7 |
| 9 | 54.81 | −159.98 | 26.16 | 13.30 | 264.33 | 3.72 | 16 |
| 10 | 53.57 | −165.89 | 28.37 | 14.10 | 222.23 | 3.69 | 13 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, P.; Kashyap, Y.; Castelino, R.V.; Karthikeyan, A.; Sharma K., M.; Karmakar, D.; Kosmopoulos, P. Laboratory-Scale Airborne Wind Energy Conversion Emulator Using OPAL-RT Real-Time Simulator. Energies 2023, 16, 6804. https://doi.org/10.3390/en16196804
Kumar P, Kashyap Y, Castelino RV, Karthikeyan A, Sharma K. M, Karmakar D, Kosmopoulos P. Laboratory-Scale Airborne Wind Energy Conversion Emulator Using OPAL-RT Real-Time Simulator. Energies. 2023; 16(19):6804. https://doi.org/10.3390/en16196804
Chicago/Turabian StyleKumar, Pankaj, Yashwant Kashyap, Roystan Vijay Castelino, Anabalagan Karthikeyan, Manjunatha Sharma K., Debabrata Karmakar, and Panagiotis Kosmopoulos. 2023. "Laboratory-Scale Airborne Wind Energy Conversion Emulator Using OPAL-RT Real-Time Simulator" Energies 16, no. 19: 6804. https://doi.org/10.3390/en16196804
APA StyleKumar, P., Kashyap, Y., Castelino, R. V., Karthikeyan, A., Sharma K., M., Karmakar, D., & Kosmopoulos, P. (2023). Laboratory-Scale Airborne Wind Energy Conversion Emulator Using OPAL-RT Real-Time Simulator. Energies, 16(19), 6804. https://doi.org/10.3390/en16196804