




Internet-Distributed Hardware-in-the-Loop Simulation Platform for Plug-In Fuel Cell Hybrid Vehicles

Abstract
:1. Introduction
2. Configuration of the ID-HIL Platform
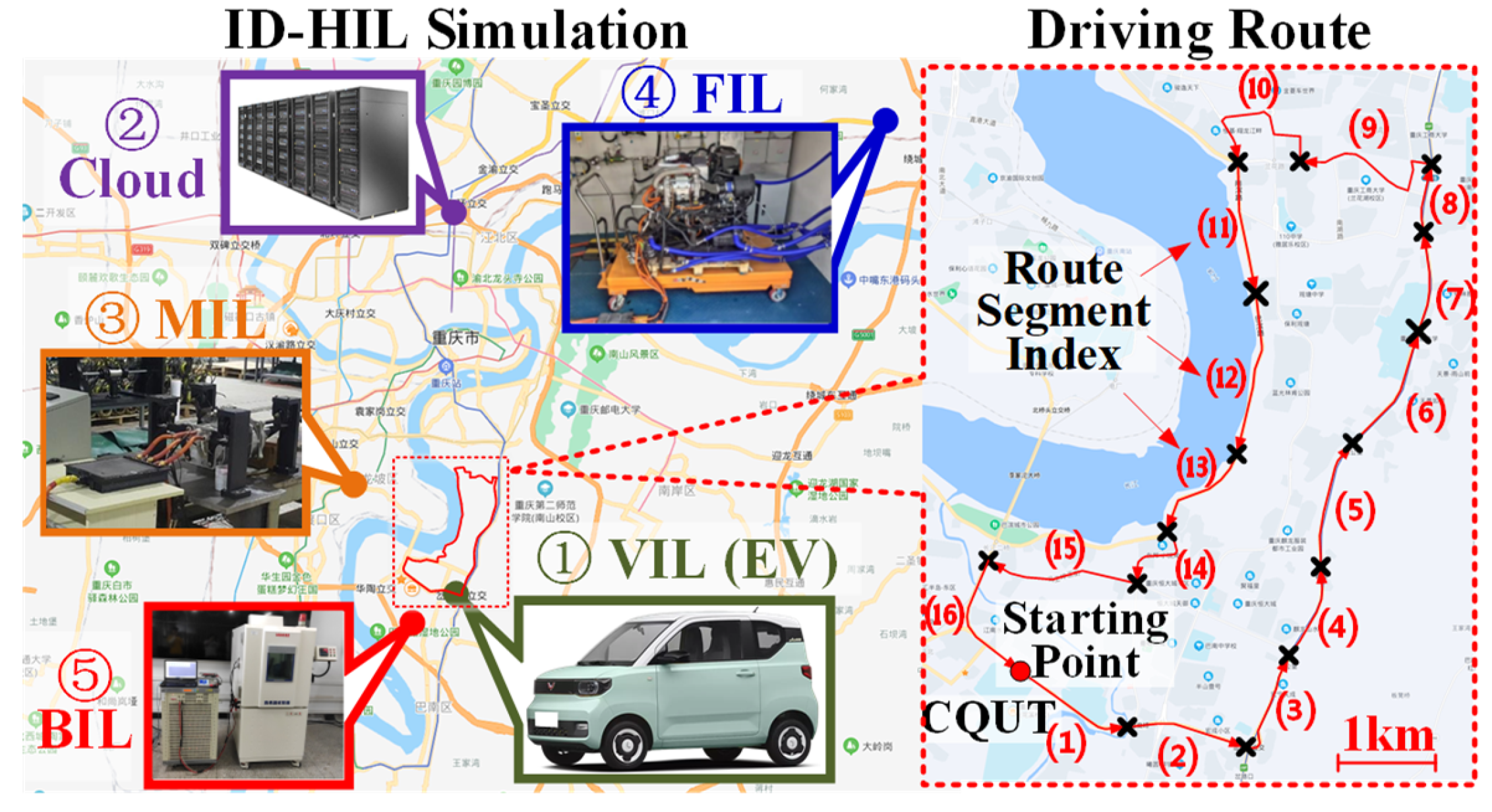
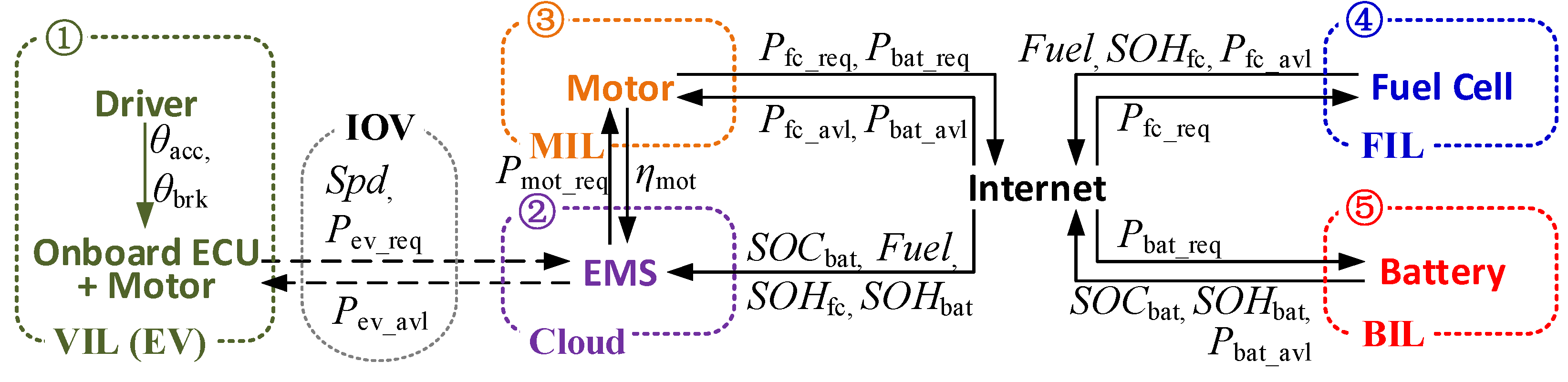
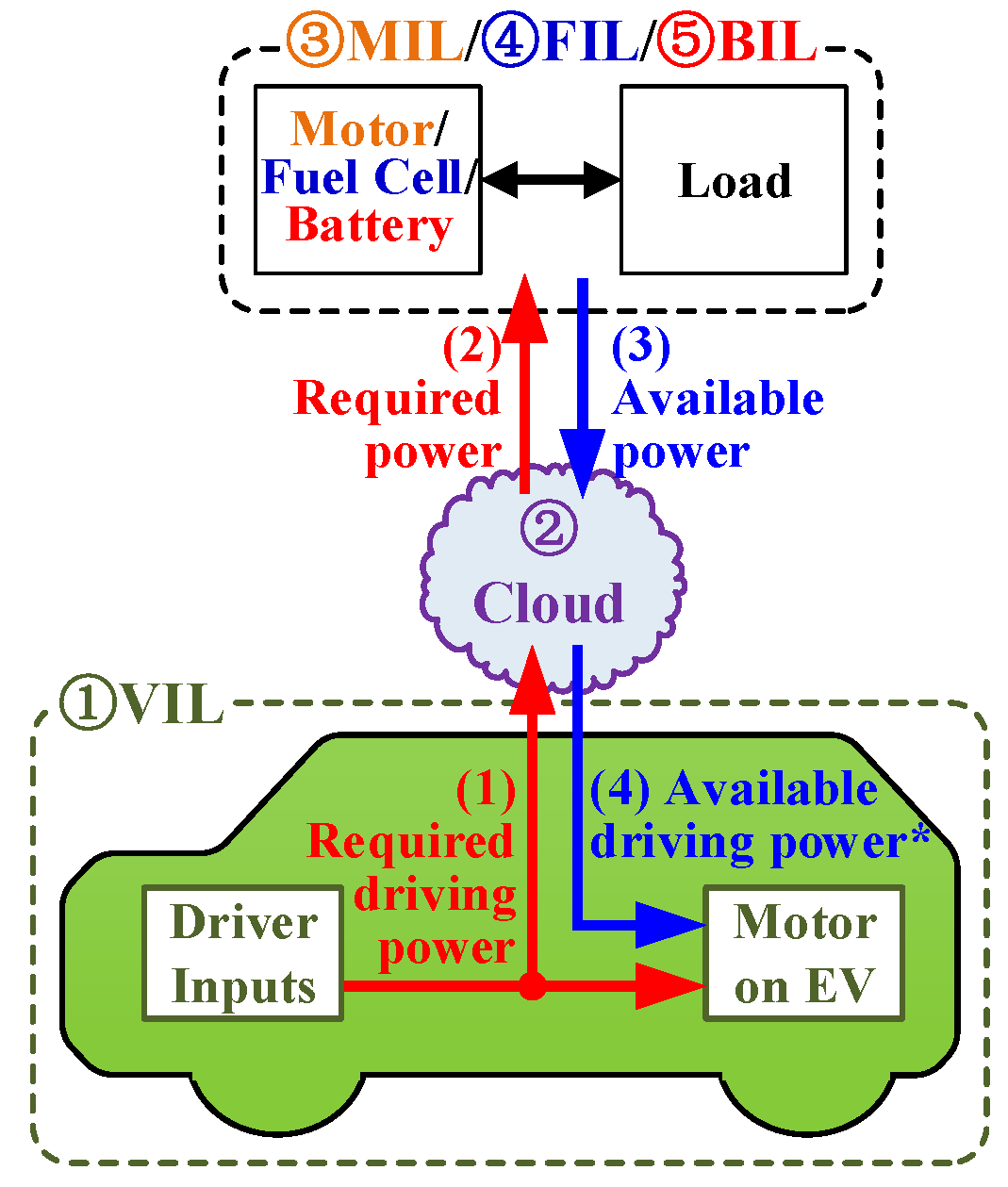
2.1. Overview and Geographical Distribution of ID-HIL
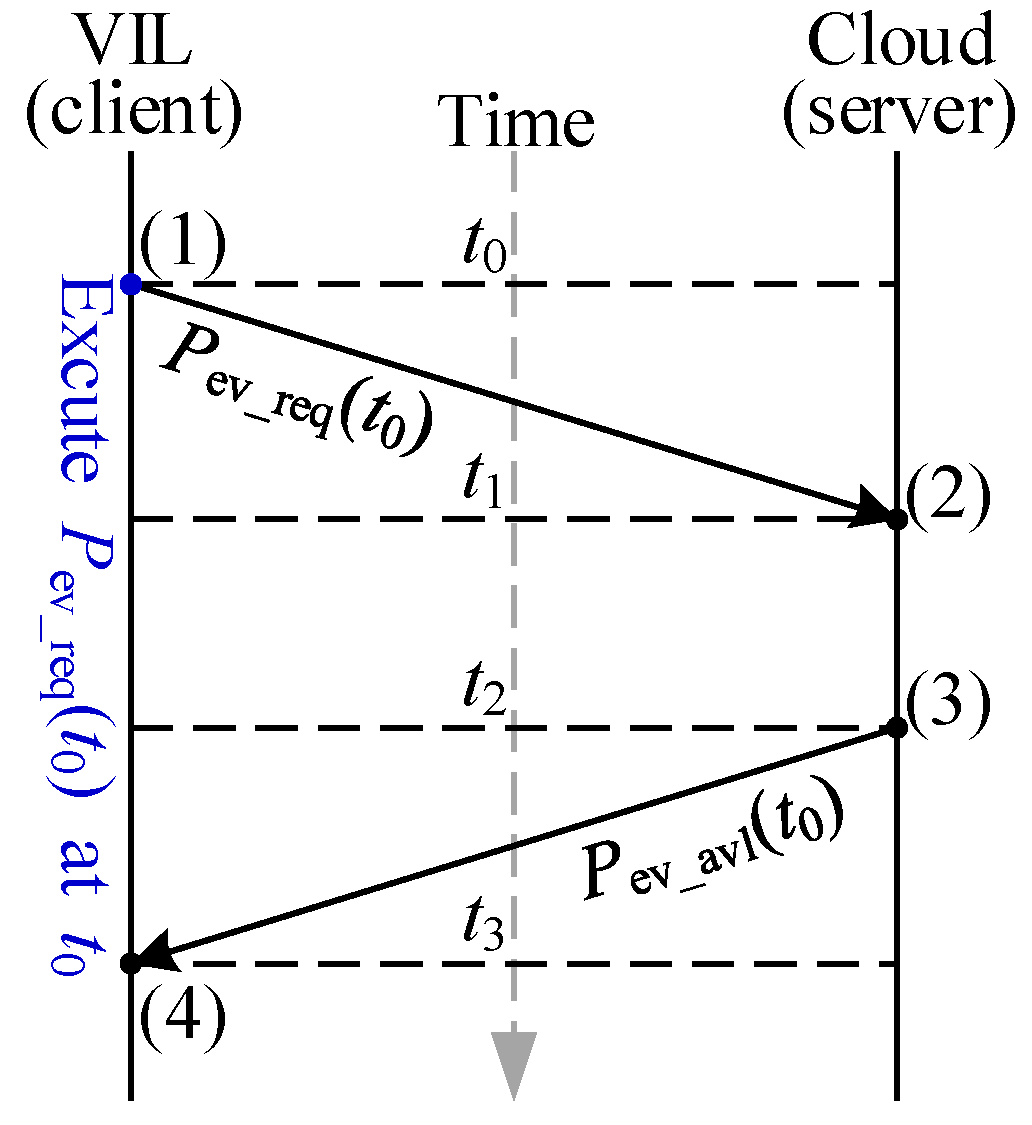
2.2. Network Configuration of ID-HIL
3. In-Loop Subsystems of the ID-HIL Platform
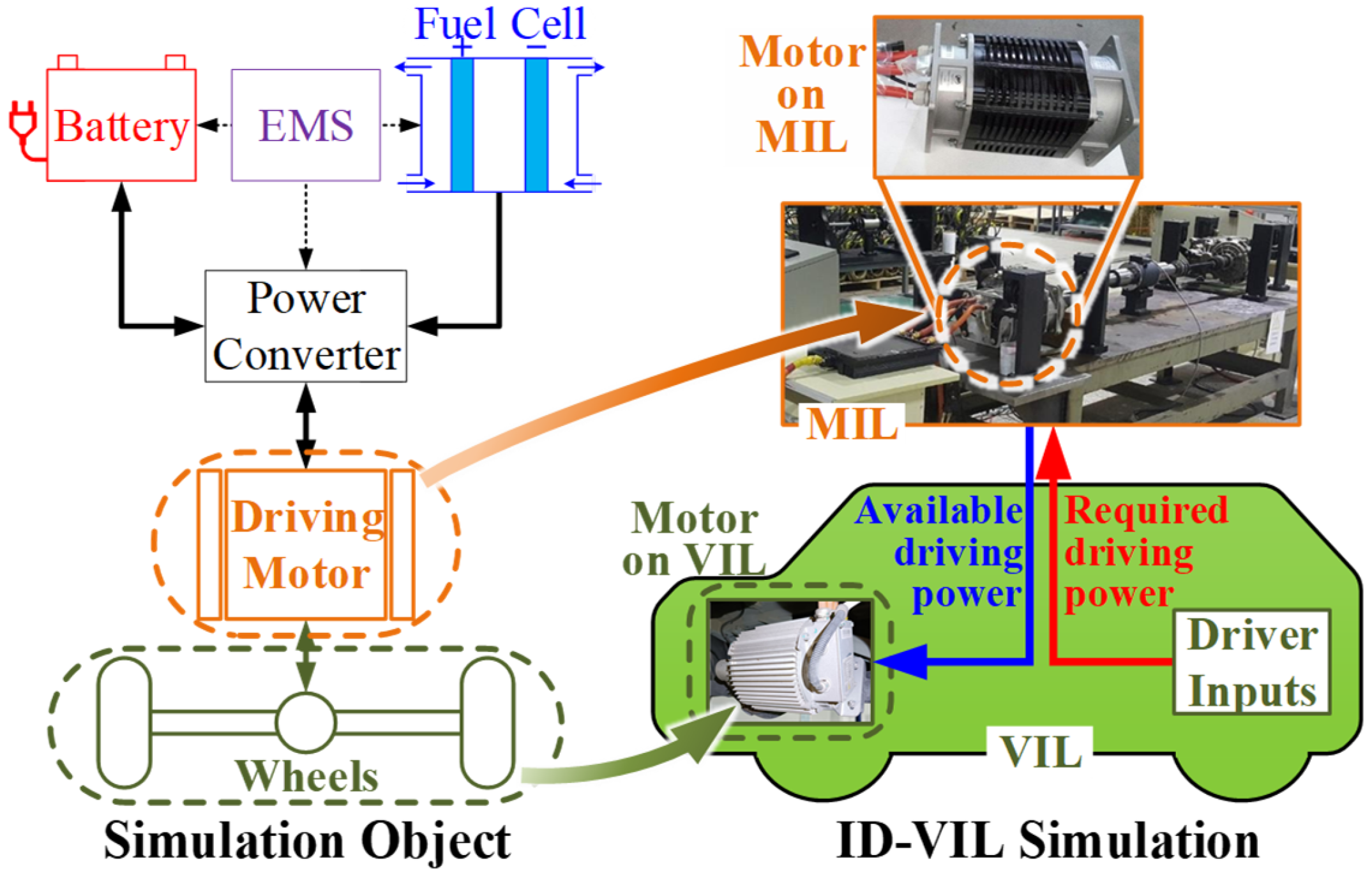
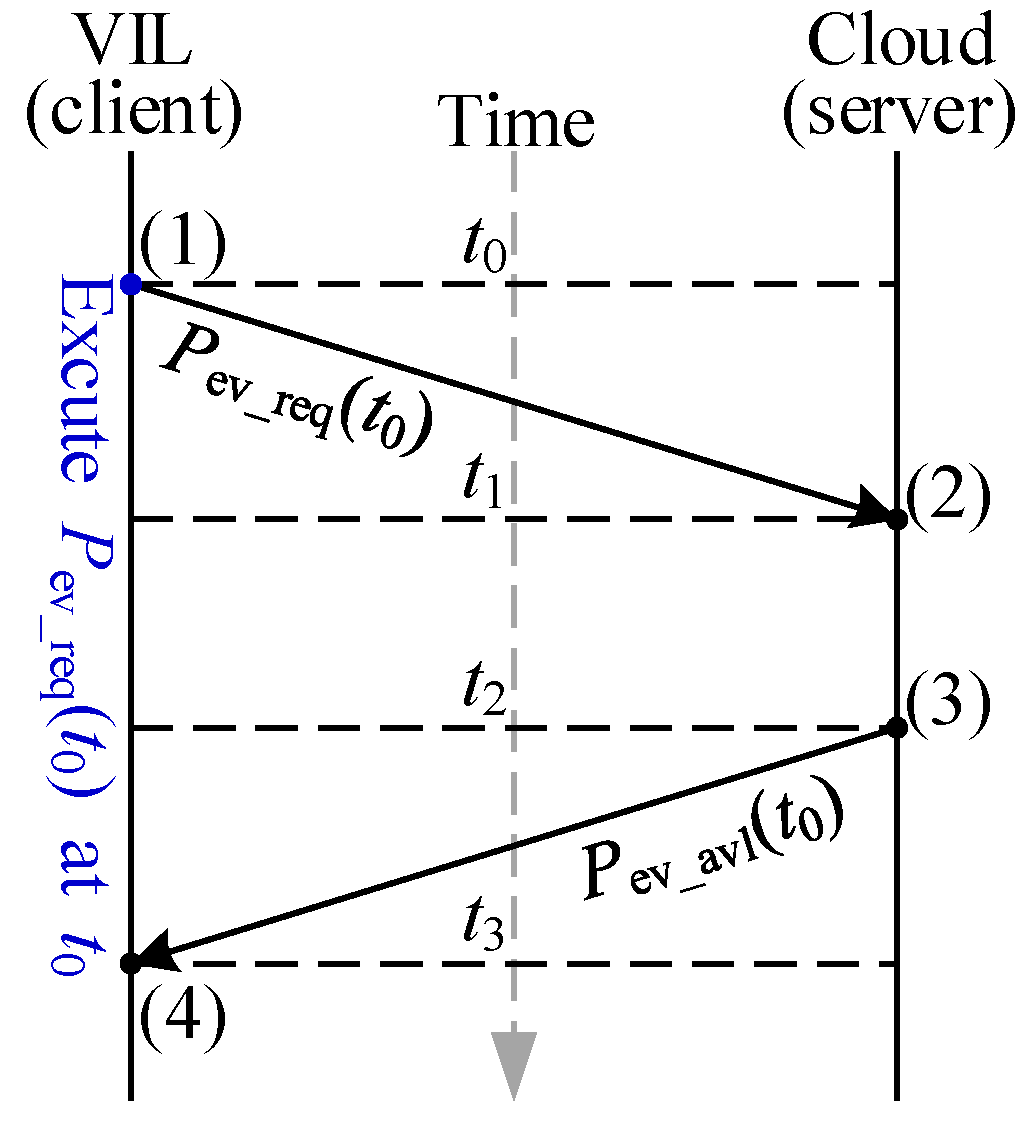
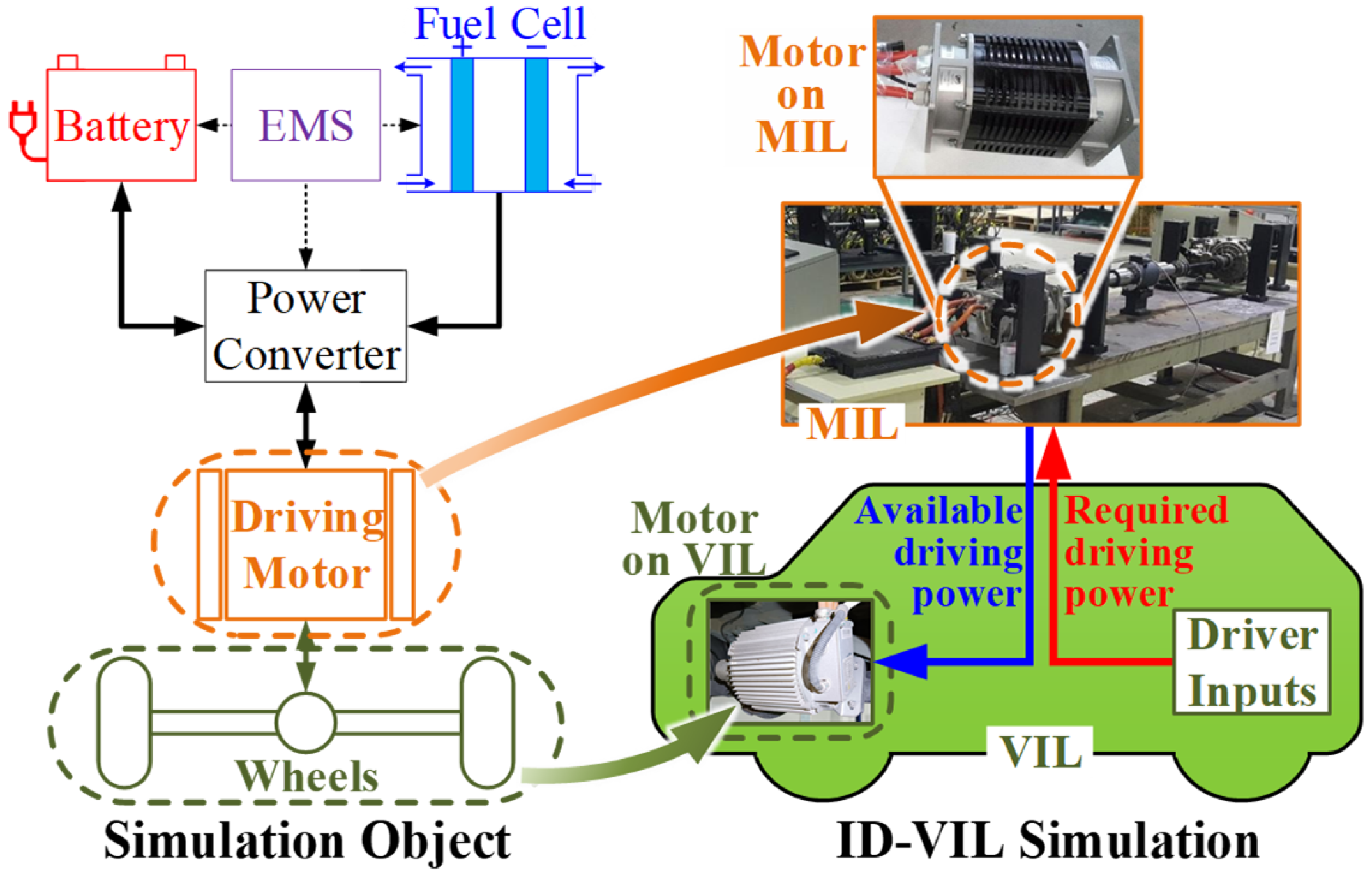
3.1. Vehicle-in-the-Loop Subsystem (VIL)
3.2. Cloud-in-the-Loop Subsystem (Cloud)
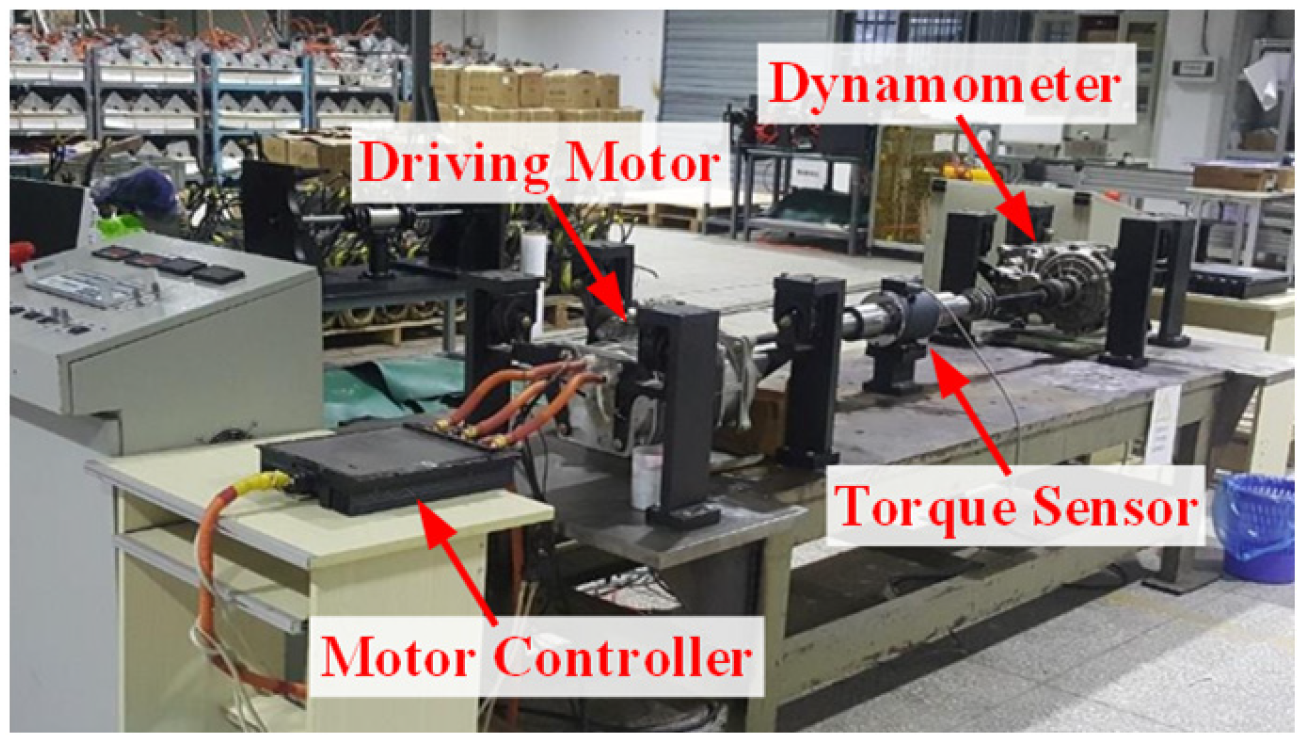
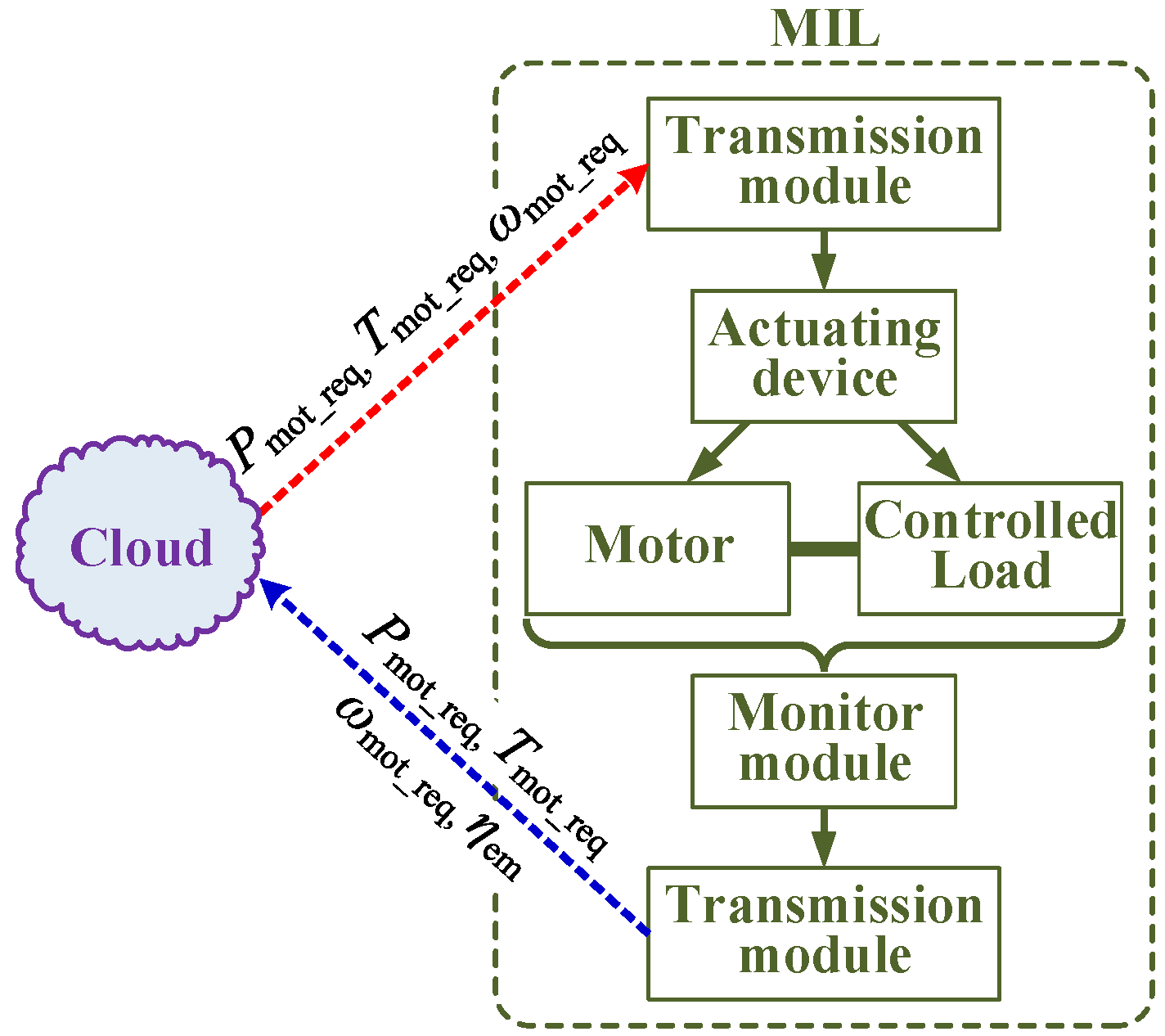
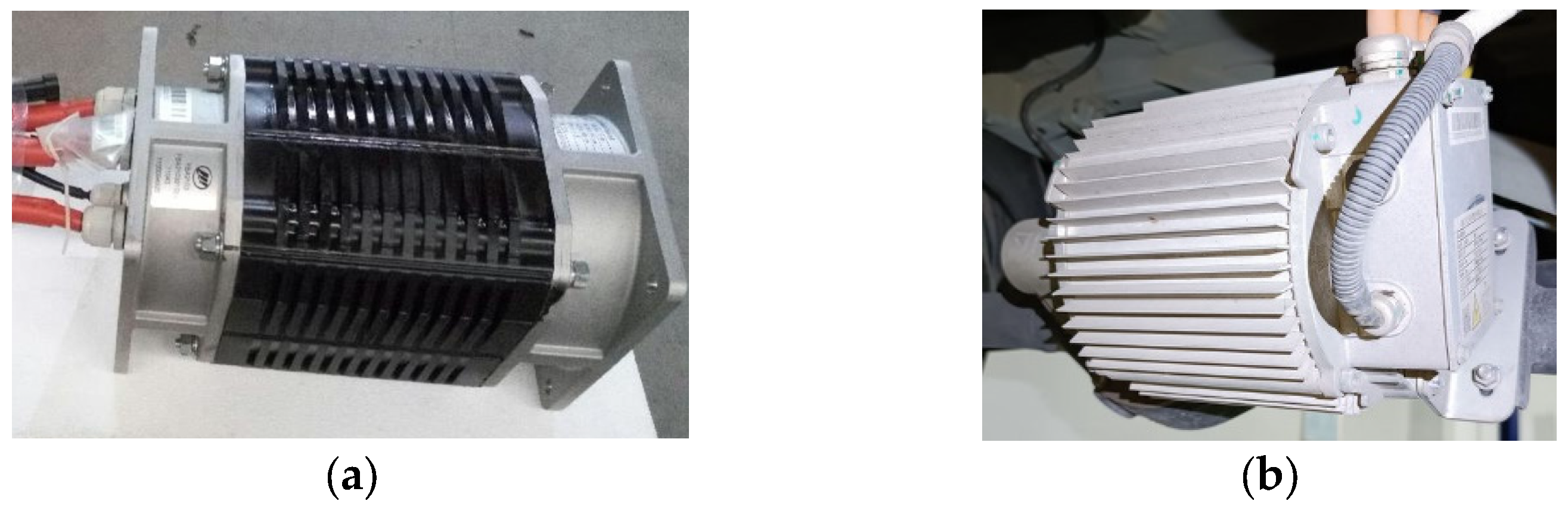
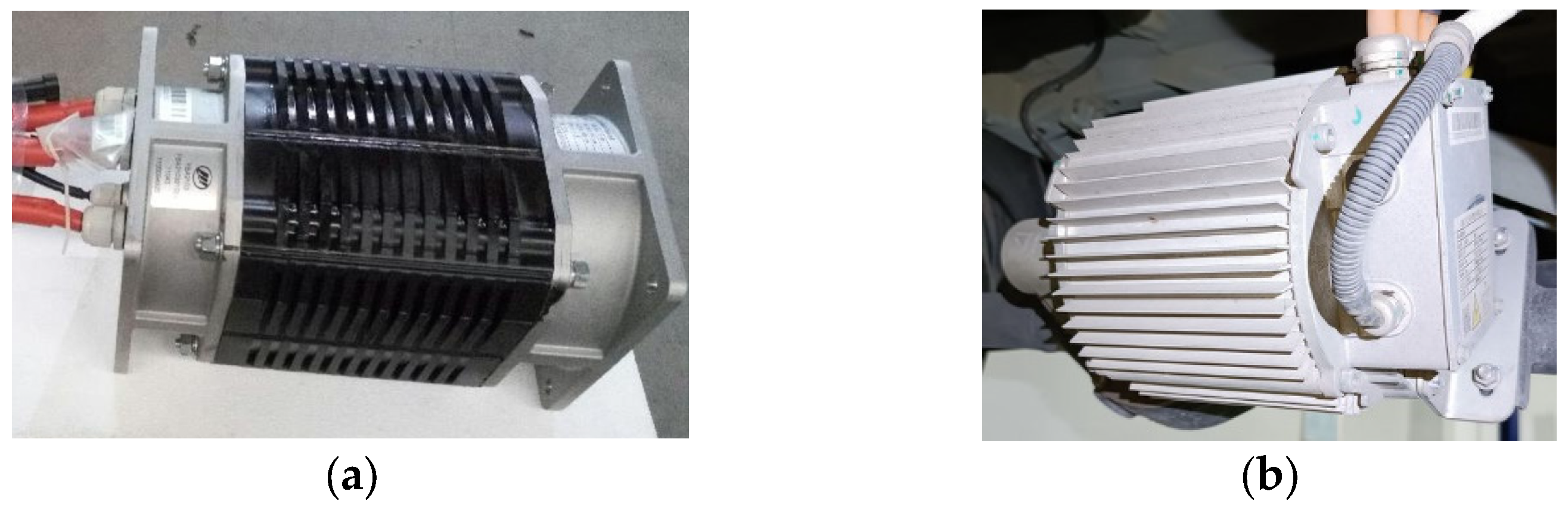
3.3. Motor-in-the-Loop Subsystems (MIL)
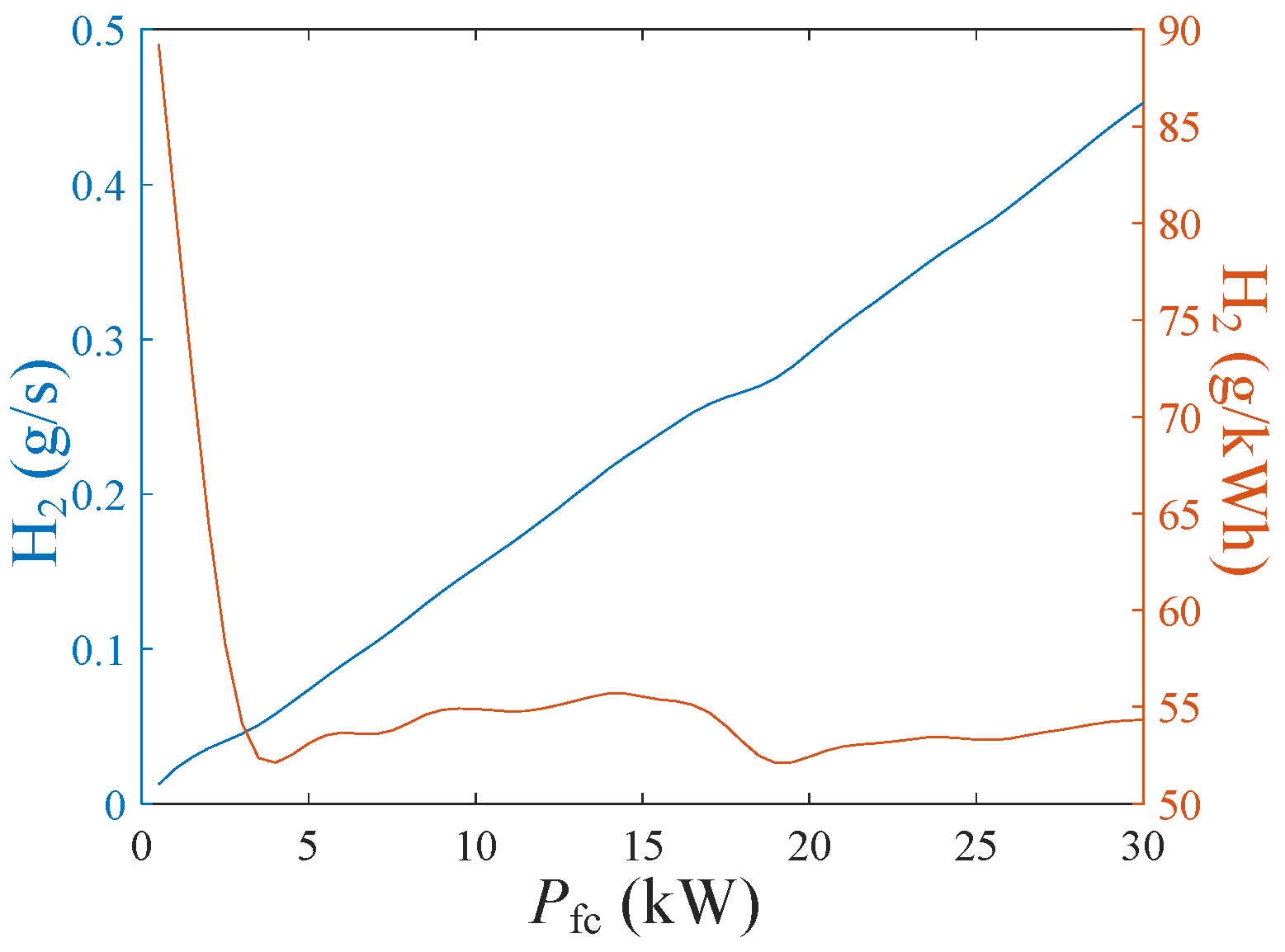
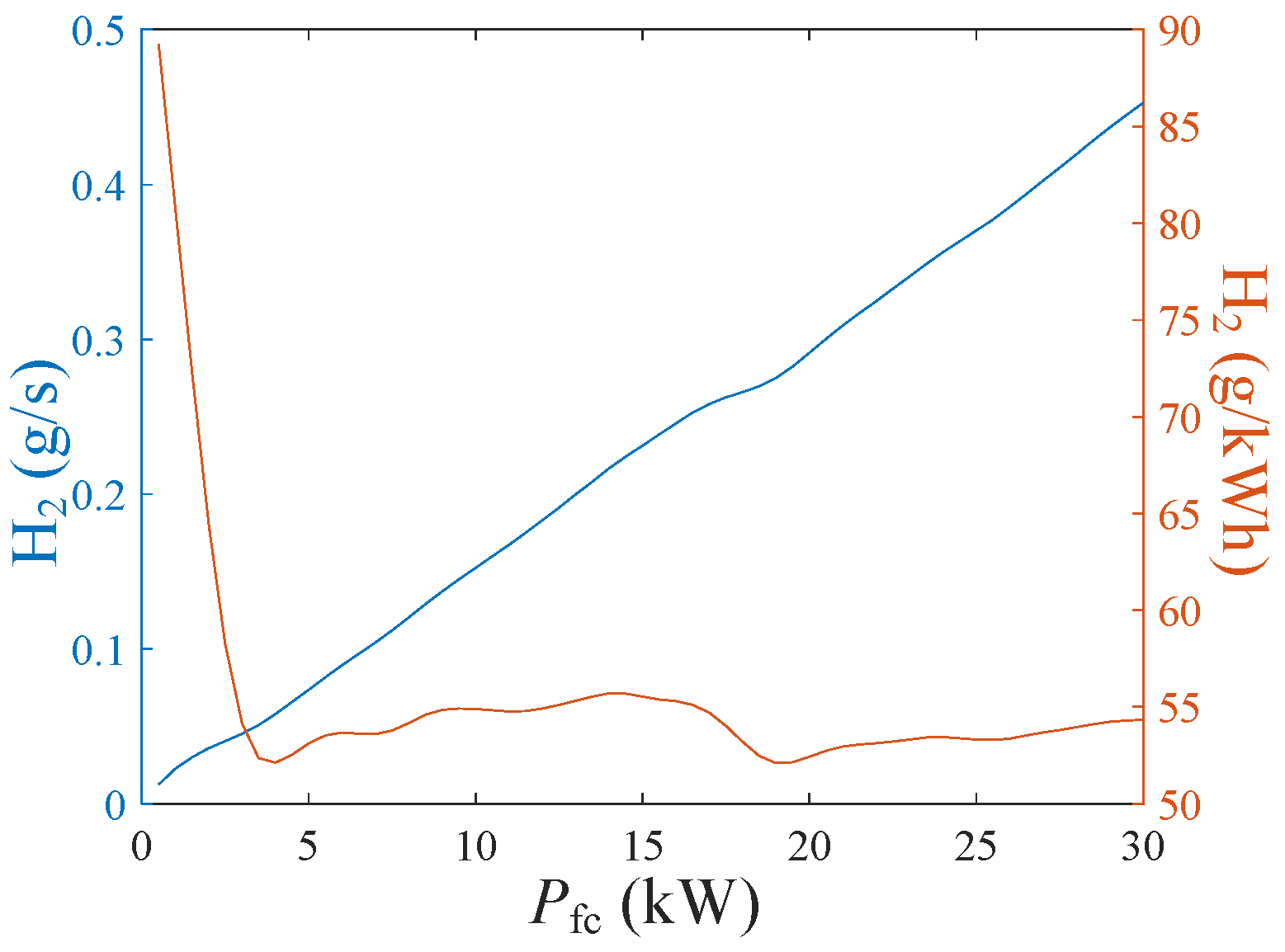
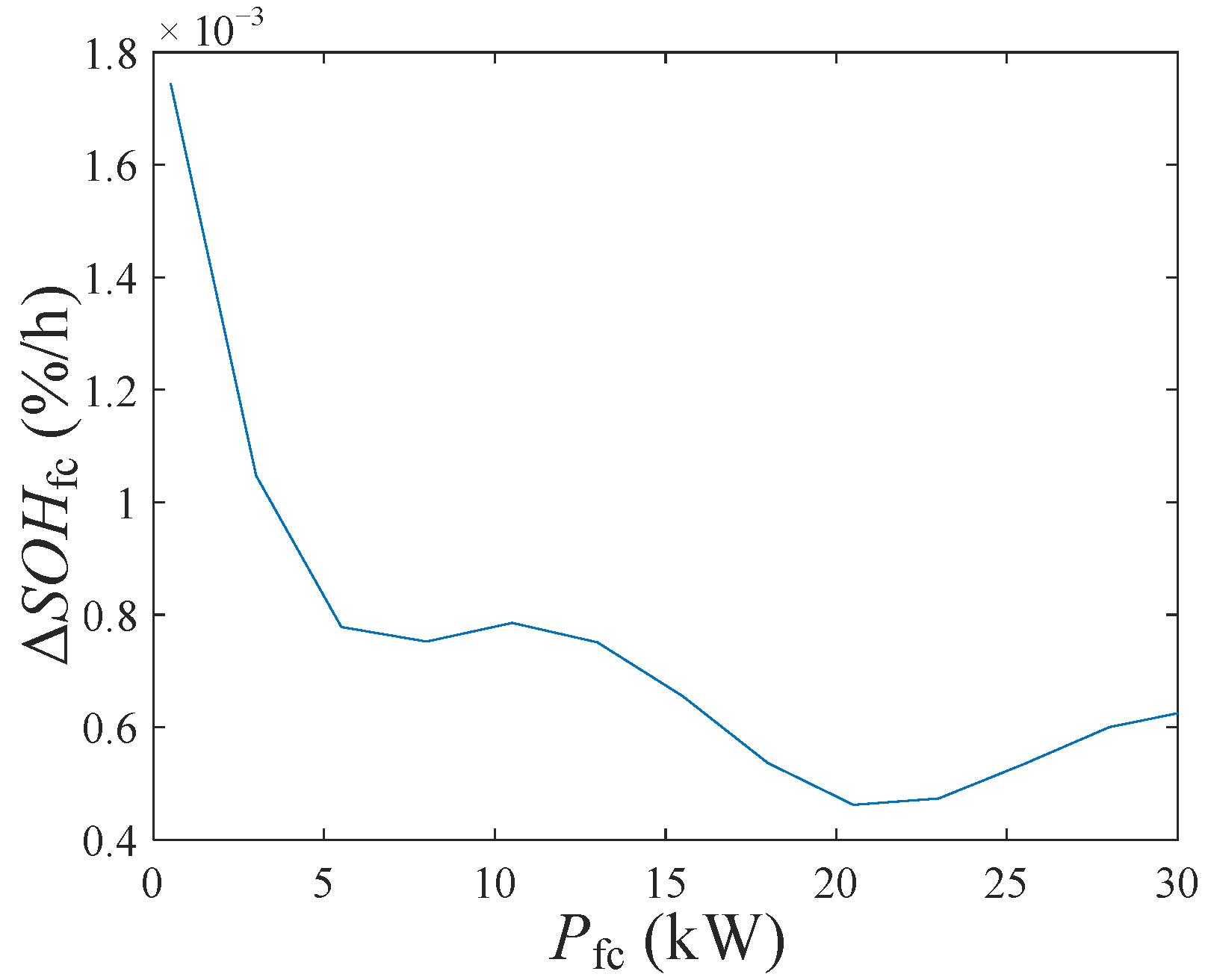
3.4. Fuel Cell-in-the-Loop Subsystems (FIL)
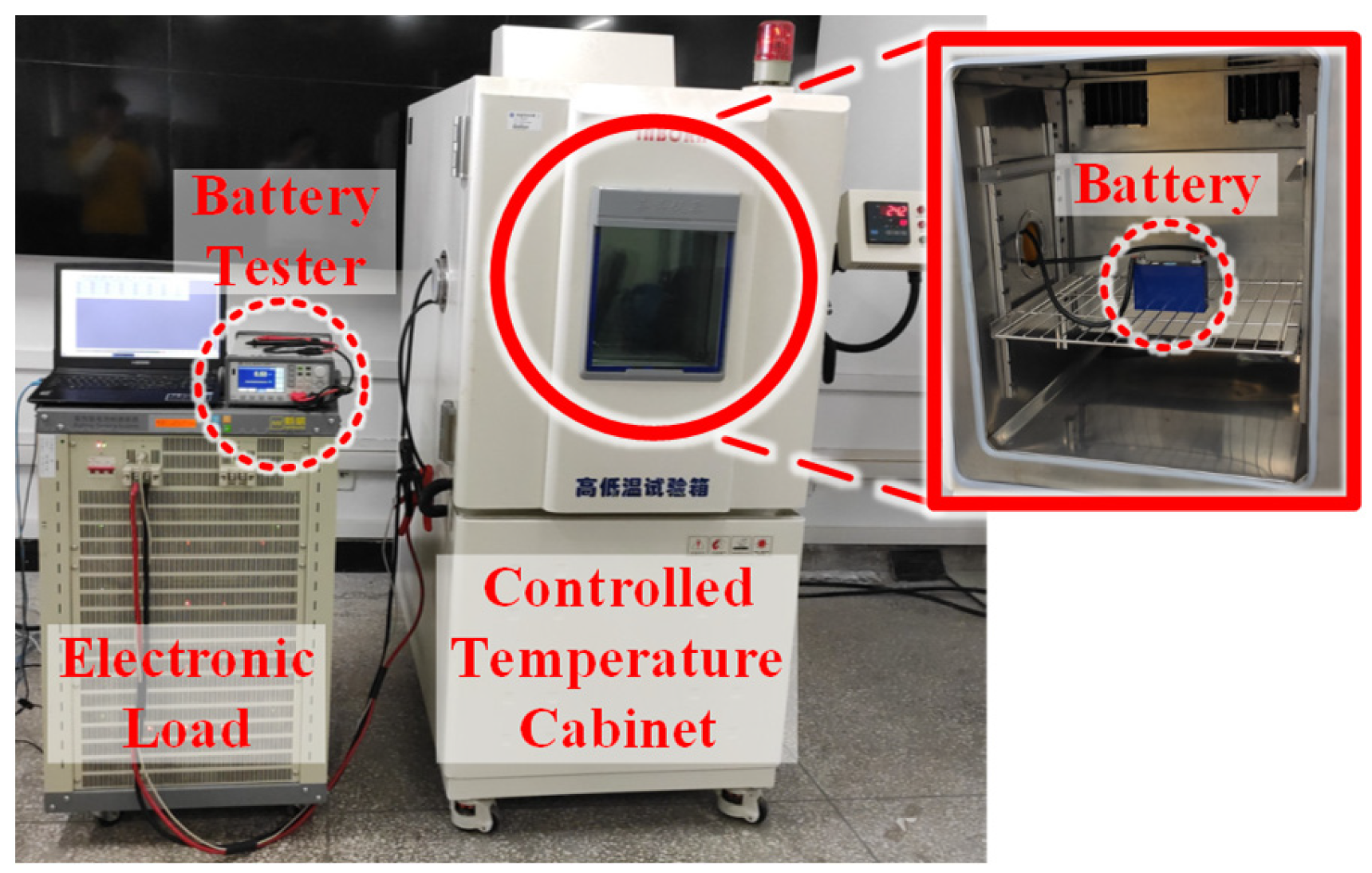
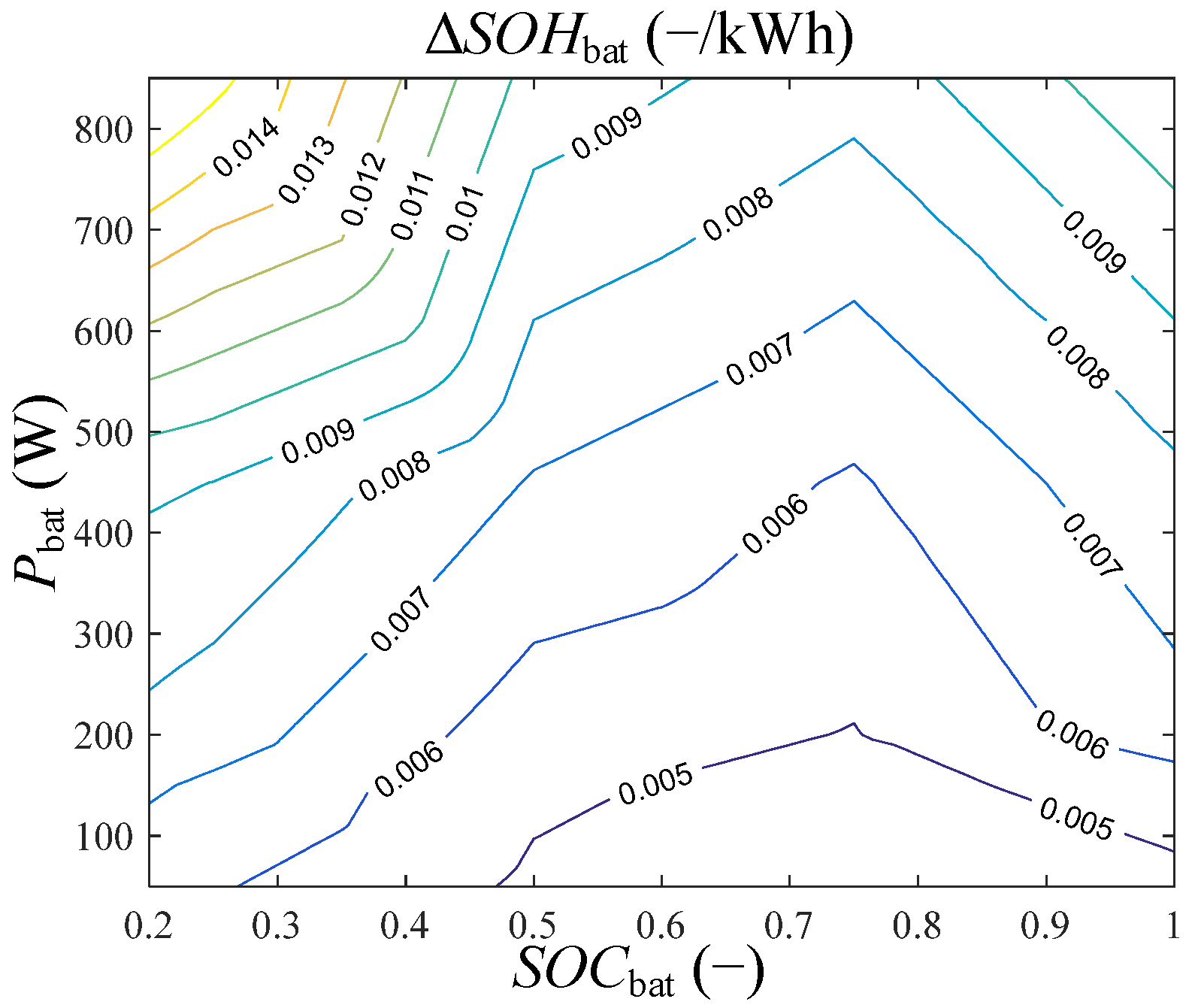
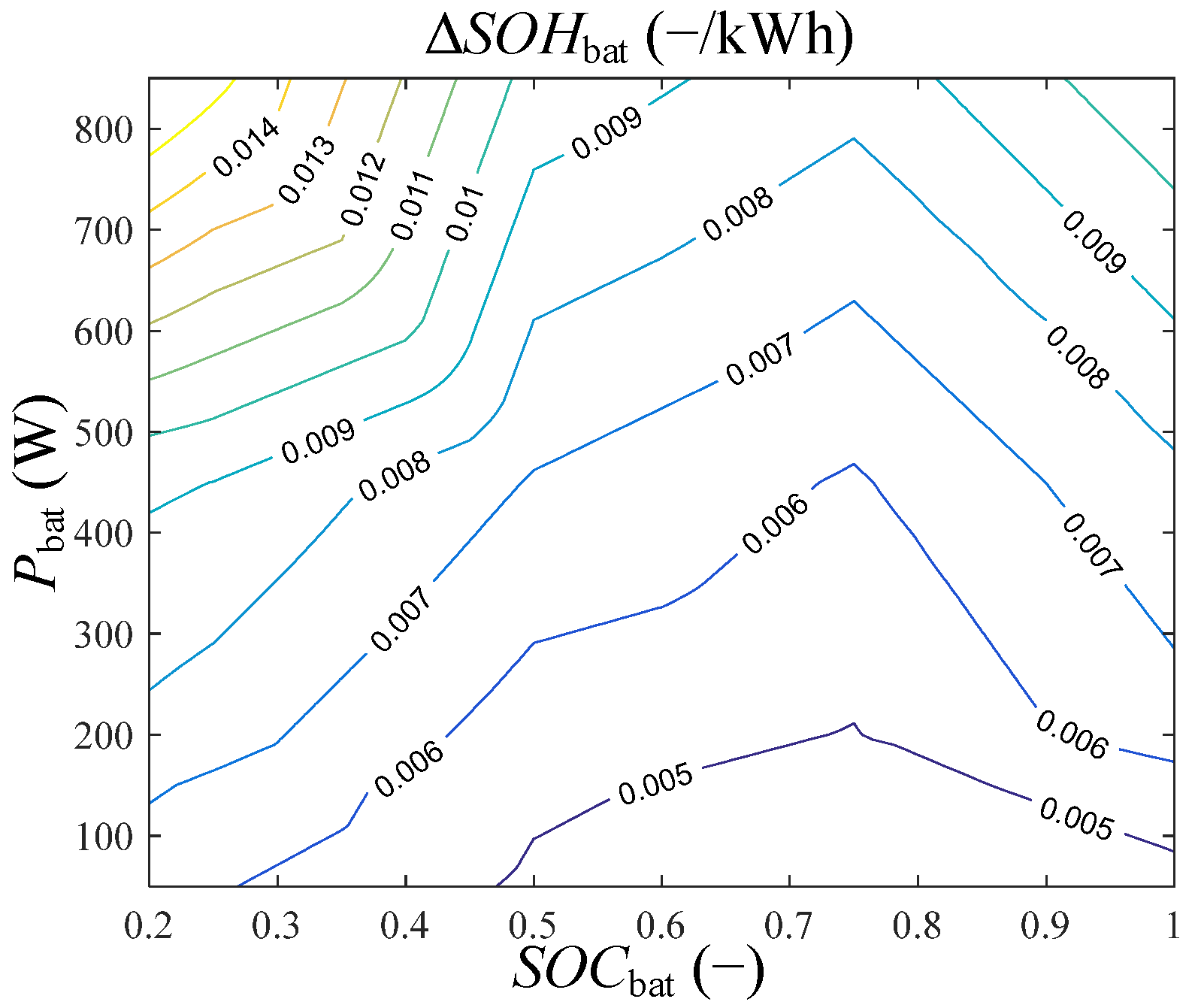
3.5. Battery-in-the-Loop Subsystems (BIL)
4. Experiment and Analysis
4.1. Experiment Arrangement
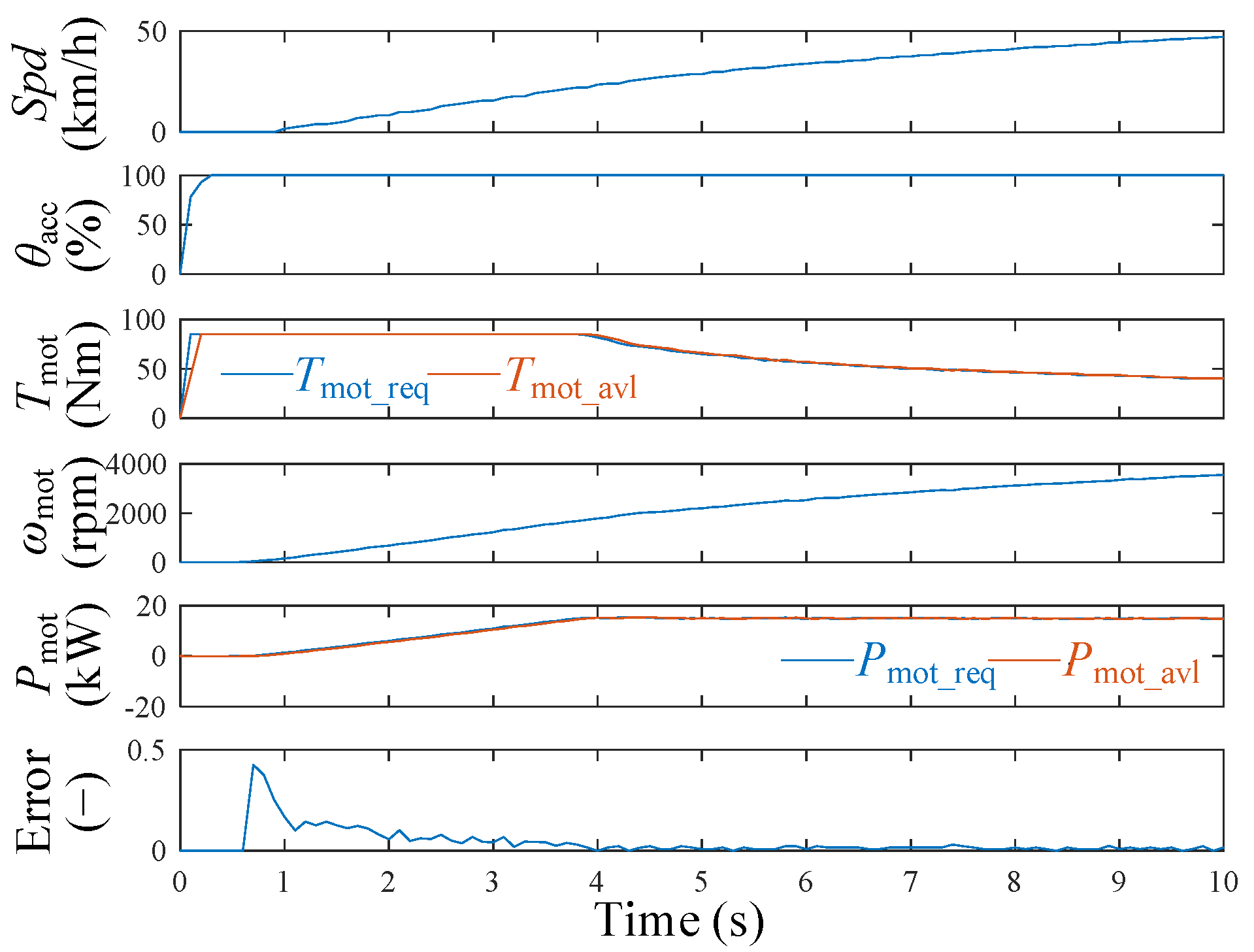
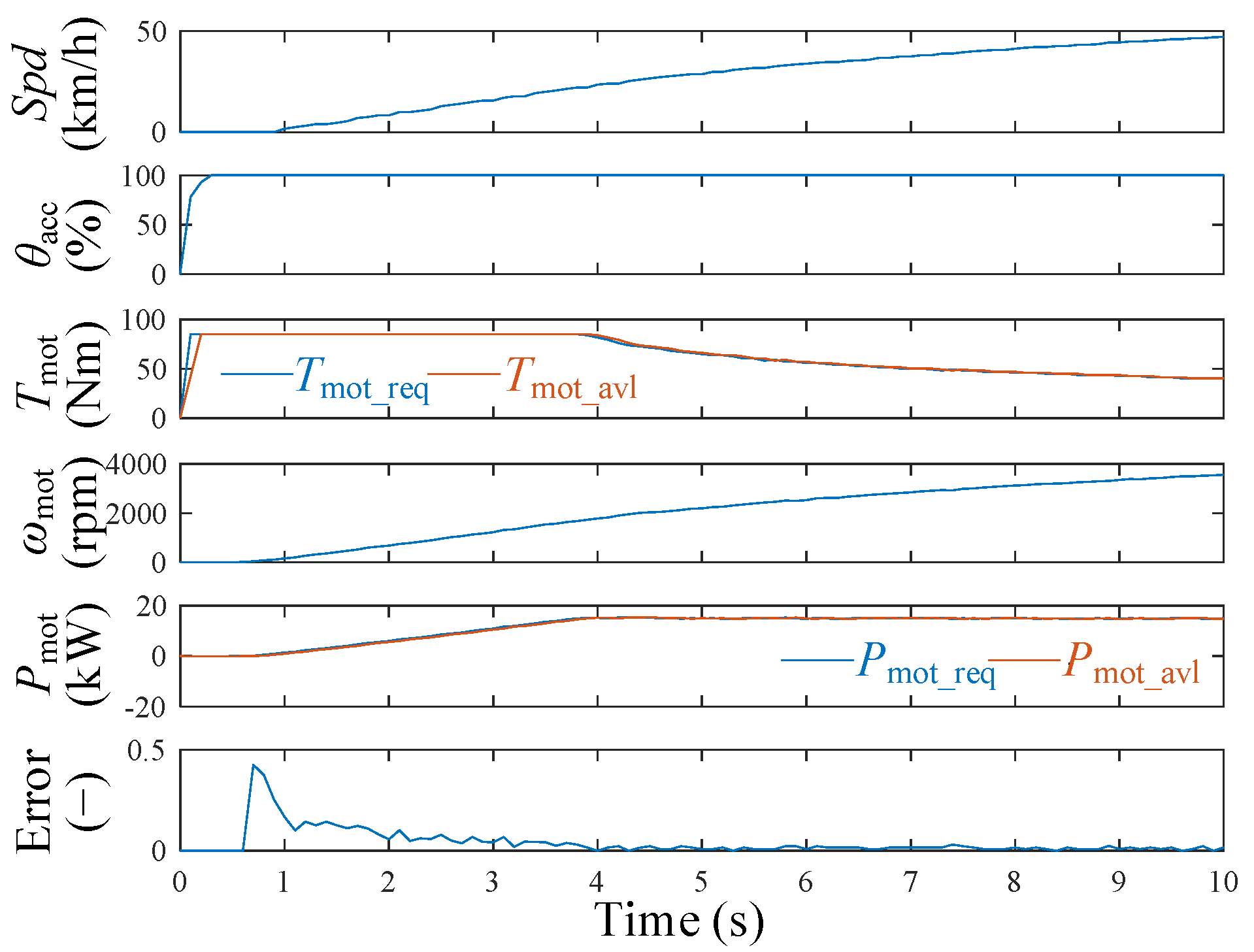
4.2. 10 s Acceleration Experiment
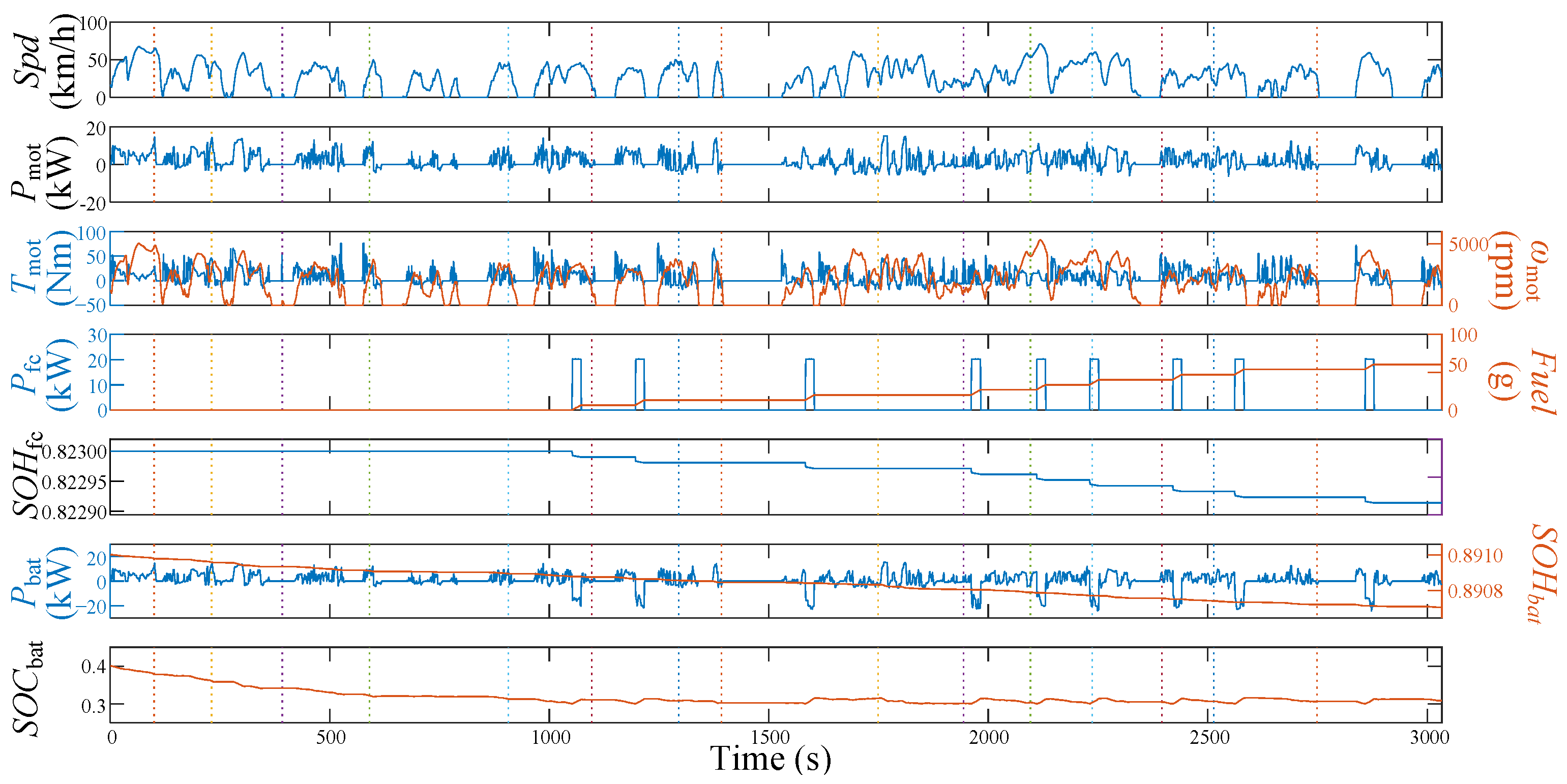
4.3. On-Road Experiment Result and Analysis
5. Conclusions
- (1)
- The ID-HIL system can simulate the PHEV’s dynamic characteristics with high fidelity;
- (2)
- The client-side prediction method can effectively reduce the ID-HIL system’s network delay, supporting enough maneuverability for on-road driving;
- (3)
- The EMS can seriously affect the degradation process of the onboard power sources. For example, the frequent start–stop operation of the fuel cells can essentially decrease their life cycle.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Acronyms | |
| BOL/EOL | Beginning/End of life |
| CDCS | Charge-depleting and charge-sustaining |
| EMS | Energy management strategy |
| HEV | Hybrid electrical vehicle |
| HIL | Hardware-in-the-loop |
| ID-HIL | Internet-distributed HIL |
| IOV | Internet of vehicle |
| NEDC | New European Driving Cycle |
| PHEV | Plug-in HEV |
| PMSM | Permanent Magnet Synchronous Motor |
| UDDS | Urban Dynamometer Driving Schedule |
| UDP | User Datagram Protocol |
| VIL/MIL/FIL/BIL | Vehicle/Motor/Fuel cell/Battery-in-the-loop |
| Symbols | |
| Fuel | Fuel cell’s fuel (H2) consumption (g) |
| Pbat_req/Pbat_avl | Required/available power for the in-loop battery pack (kW) |
| Pev_req/Pev_avl | Required/available power for the in-loop vehicle (kW) |
| Pfc_req/Pfc_avl | Required/available power for the in-loop fuel cell stack (kW) |
| Pmot_req/Pmot_avl | Required/available power for the in-loop motor (kW) |
| SOCbat | Battery’s state of charge (%) |
| SOHfc/SOHbat | Fuel cell/battery’s state of health (%) |
| Spd | Vehicle speed (km/h) |
| Tmot/ωmot | Motor’s output torque/speed (Nm/rpm) |
| ηmot | Motor’s energy efficiency (%) |
| θacc/θbrk | Position of acceleration/brake pedal (%) |
References
- Tran, D.D.; Vafaeipour, M.; Baghdadi, M.E.; Barrero, R.; Mierlo, J.V.; Hegazy, O. Thorough state-of-the-art analysis of electric and hybrid vehicle powertrains: Topologies and integrated energy management strategies. Renew. Sustain. Energy Rev. 2020, 119, 109596. [Google Scholar] [CrossRef]
- Dong, H.; Fu, J.; Zhao, Z.; Liu, Q.; Li, Y.; Liu, J. A comparative study on the energy flow of a conventional gasoline-powered vehicle and a new dual clutch parallel-series plug-in hybrid electric vehicle under NEDC. Energy Convers. Manag. 2020, 218, 113019. [Google Scholar] [CrossRef]
- Vichard, L.; Petrone, R.; Harel, F.; Ravey, A.; Venet, P.; Hissel, D. Long term durability test of open-cathode fuel cell system under actual operating conditions. Energy Convers. Manag. 2020, 212, 112813. [Google Scholar] [CrossRef]
- Cao, T.F.; Lin, H.; Chen, L.; He, Y.L.; Tao, W.Q. Numerical investigation of the coupled water and thermal management in PEM fuel cell. Appl. Energy 2013, 112, 1115–1125. [Google Scholar] [CrossRef]
- Zhao, X.; Ma, X.; Chen, B.; Shang, Y.; Song, M. Challenges toward carbon neutrality in China: Strategies and countermeasures. Resour. Conserv. Recycl. 2022, 176, 105959. [Google Scholar] [CrossRef]
- Amir, M.; Deshmukh, R.G.; Khalid, H.M.; Said, Z.; Raza, A.; Muyeen, S.M.; Nizami, A.-S.; Elavarasan, R.M.; Saidur, R.; Sopian, K. Energy storage technologies: An integrated survey of developments, global economical/environmental effects, optimal scheduling model, and sustainable adaption policies. J. Energy Storage 2023, 72, 108694. [Google Scholar] [CrossRef]
- Chen, H.; Pei, P.; Song, M. Lifetime prediction and the economic lifetime of Proton Exchange Membrane fuel cells. Appl. Energy 2015, 142, 154–163. [Google Scholar] [CrossRef]
- Bellache, K.; Camara, M.B.; Dakyo, B.; Ramasamy, S. Aging characterization of Lithium Iron Phosphate batteries considering temperature and direct current undulations as degrading factors. IEEE Trans. Ind. Electron. 2021, 68, 9696–9706. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, Y.; Yin, C. Hardware-in-the-loop simulation of robust mode transition control for a series-parallel hybrid electric vehicle. IEEE Trans. Veh. Technol. 2016, 65, 1059–1069. [Google Scholar] [CrossRef]
- Tara, E.; Filizadeh, S.; Dirks, E. Battery-in-the-loop simulation of a planetary-gear-based hybrid electric vehicle. IEEE Trans. Veh. Technol. 2013, 62, 573–581. [Google Scholar] [CrossRef]
- Lee, H.; Sul, S. Fuzzy-logic-based torque control strategy for parallel-type hybrid electric vehicle. IEEE Trans. Ind. Electron. 1998, 45, 625–631. [Google Scholar]
- He, H.; Xiong, R.; Zhao, K.; Liu, Z. Energy management strategy research on a hybrid power system by hardware-in-loop experiments. Appl. Energy 2013, 112, 1311–1317. [Google Scholar] [CrossRef]
- Kermani, S.; Trigui, R.; Delprat, S.; Jeanneret, B.; Guerra, T.M. PHIL implementation of energy management optimization for a parallel HEV on a predefined route. IEEE Trans. Veh. Technol. 2011, 60, 782–792. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, H.; Guo, Q. Varying-domain optimal management strategy for parallel hybrid electric vehicles. IEEE Trans. Veh. Technol. 2014, 63, 603–616. [Google Scholar] [CrossRef]
- Kim, Y.; Salvi, A.; Siegel, J.B.; Filipi, Z.S.; Stefanopoulou, A.G.; Ersal, T. Hardware-in-the-loop validation of a power management strategy for hybrid powertrains. Control Eng. Pract. 2014, 29, 277–286. [Google Scholar] [CrossRef]
- Zimran, R.; Khalid, H.M.; Muyeen, S.M. Communication systems in distributed generation: A bibliographical review and frameworks. IEEE Access 2020, 8, 207226–207239. [Google Scholar]
- Bernier, Y. Latency Compensating Methods in Client/Server In-Game Protocol Design and Optimization. 2001. Available online: http://web.cs.wpi.edu/~claypool/courses/4513-B03/papers/games/bernier.pdf (accessed on 21 May 2023).
- Zhang, Y.; Liu, H. Fuzzy multi-objective control strategy for parallel HEV. IET Electr. Syst. Transp. 2012, 2, 39–50. [Google Scholar] [CrossRef]
- GB/T 38914-2020; Evaluation Method for Lifetime of Proton Exchange Membrane Fuel Cell Stack in Vehicle Application. State Administration for Market Regulation: Beijing, China. National Standardization Administration: Beijing, China, 2020.
- Pei, P.; Chang, Q.; Tang, T. A quick evaluating method for automotive fuel cell lifetime. Int. J. Hydrog. Energy 2008, 33, 3829–3836. [Google Scholar] [CrossRef]
- Qi, W.; Zhang, X.; Niu, J.; Zhang, Z.; Huang, J.; Ge, S.; Zhang, Y. Mechanism insight into the oxygen reduction reaction on dual FeN2 embedded graphene for proton exchange membrane fuel cells. Sustain. Energy Fuels 2022, 6, 4024–4033. [Google Scholar] [CrossRef]
- Khalid, H.M.; Flitti, F.; Muyeen, S.M.; Elmoursi, M.S.; Tha’er, O.S.; Yu, X. Parameter estimation of vehicle batteries in V2G systems: An exogenous function-based approach. IEEE Trans. Ind. Electron. 2021, 69, 9535–9546. [Google Scholar] [CrossRef]
- Andre, D.; Appel, C.; Guth, T.; Sauer, D. Advanced mathematical methods of SOC and SOH estimation for lithium-ion batteries. J. Power Sources 2013, 224, 20–27. [Google Scholar] [CrossRef]
- Zhang, S.; Hu, X.; Xie, S.; Song, Z.; Hu, L.; Hou, C. Adaptively coordinated optimization of battery aging and energy management in plug-in hybrid electric buses. Appl. Energy 2019, 256, 113891. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subsystem | Configuration | Parameters | Location |
|---|---|---|---|
| Vehicle | Vehicle-in-the-loop simulation (VIL) | Hongguang MiniEV, Vehicle mass: 0.7 t, Frontal area: 2 m2 | Hongguang Road around CQUT Huaxi Campus |
| EMS | Soft simulation (Cloud) | Internet-distributed EMS | IDC room of China Telecom |
| Motor | Motor-in-the-loop simulation (MIL) | Asynchronous motor, Rated power: 14 kW | Chongqing Baizhuan Technology Co., Ltd. |
| Fuel Cell | Fuel cell-in-the-loop simulation (FIL) | PEM, Rated power: 30 kW, Rated voltage: 168 V | Chongqing Changan Automobile Company |
| Battery | Battery-in-the-loop simulation (BIL) | Rated voltage: 3.2 V × 42, Rated capacities: 50 Ah | CQUT Huaxi Campus |
| Transmission protocol | UDP |
| Packet size | 1024 Bytes |
| Wireless connection (5G) | VIL |
| Wired connection | MIL, FIL, BIL |
| Network delay (Wireless) | ~12 ms (including processing delay) |
| Network delay (Wired) | ~10 ms (including processing delay) |
| Loss rate (Wireless) | 0% |
| Loss rate (Wired) | 0% |
| Subsystem | Parameter |
|---|---|
| Vehicle model | Hongguang MiniEV |
| Frontal area | 2 m2 |
| Vehicle mass | 700 kg |
| Cargo mass | 150 kg |
| Driving motor | PMSM |
| Rated power | 15 kW |
| Peak power | 30 kW |
| Motor–wheel gear ratio | Fixed, 14.4 |
| Wheel diameter | 0.508 m |
| Parameter Name | Motor on MIL | Motor on VIL |
|---|---|---|
| Motor type | Induction | Permanent magnet synchronous |
| Phase Number | 3 | 3 |
| Pole pairs | 2 | 4 |
| Cooling method | Air cooling | Air cooling |
| Rated power | 14 kW | 15 kW |
| Peak power | 28 kW | 30 kW |
| Rated torque | 25 Nm | 25 Nm |
| Peak torque | 85 Nm | 90 Nm |
| Name | Parameter |
|---|---|
| Type of fuel cell | Proton exchange membrane |
| Number of fuel cells | 240 |
| Reference current | 107 A |
| Reference voltage (BOL) | 168 V (0.7 × 240 V) |
| Open-circuit voltage | 295.2 V |
| Idle current | 10.2 A |
| Rated power | 30 kW |
| Name | Parameter |
|---|---|
| Battery type | LiFePO4 |
| Max discharge rate | 10 C |
| Number of battery cells | 42 |
| Rated voltage | 3.2 V |
| Rated capacity | 50 Ah |
| Ohmic resistance (BOL) | 1.21 mΩ |
| Parameter | Unit | Value |
|---|---|---|
| Departure time | - | 17:30 |
| Driving distance | km | 21 |
| Predefined SOCinit | - | 0.4 |
| Route segment num | - | 16 |
| EMS mode | - | Rule-based CDCS |
| Fuel (H2) cost | RMB/kg | 40 |
| Fuel cell stack cost | RMB/kW | 2000 |
| Battery cost | RMB/kWh | 1000 |
| (1) | Repeat until VIL reaches the destination |
| (2) | If SOC ≤ 0.305 And Not in charging Then |
| (3) | Charging with = 20.25 kW |
| (4) | End If |
| (5) | If in charging And current charging time > Tmin Then |
| (6) | If SOC > 0.31 Then |
| (7) | Stop charging |
| (8) | Else |
| (9) | Keep charging |
| (10) | End If |
| (11) | End If |
| (12) | End Repeat |
| Parameter | Unit | Meaning | Data Source |
|---|---|---|---|
| Spd | km/h | Vehicle speed | VIL |
| Pmot | kW | Motor power | MIL |
| Tmot | Nm | Motor torque | MIL |
| ωmot | rpm | Motor speed | MIL |
| Pfc | kW | Fuel cell power | FIL |
| Fuel | g | H2 consumption | FIL |
| SOHfc | - | Fuel cell SOH | FIL |
| Pbat | kW | Battery power | BIL |
| SOHbat | - | Battery SOH | BIL |
| SOCbat | - | Battery SOC | BIL |
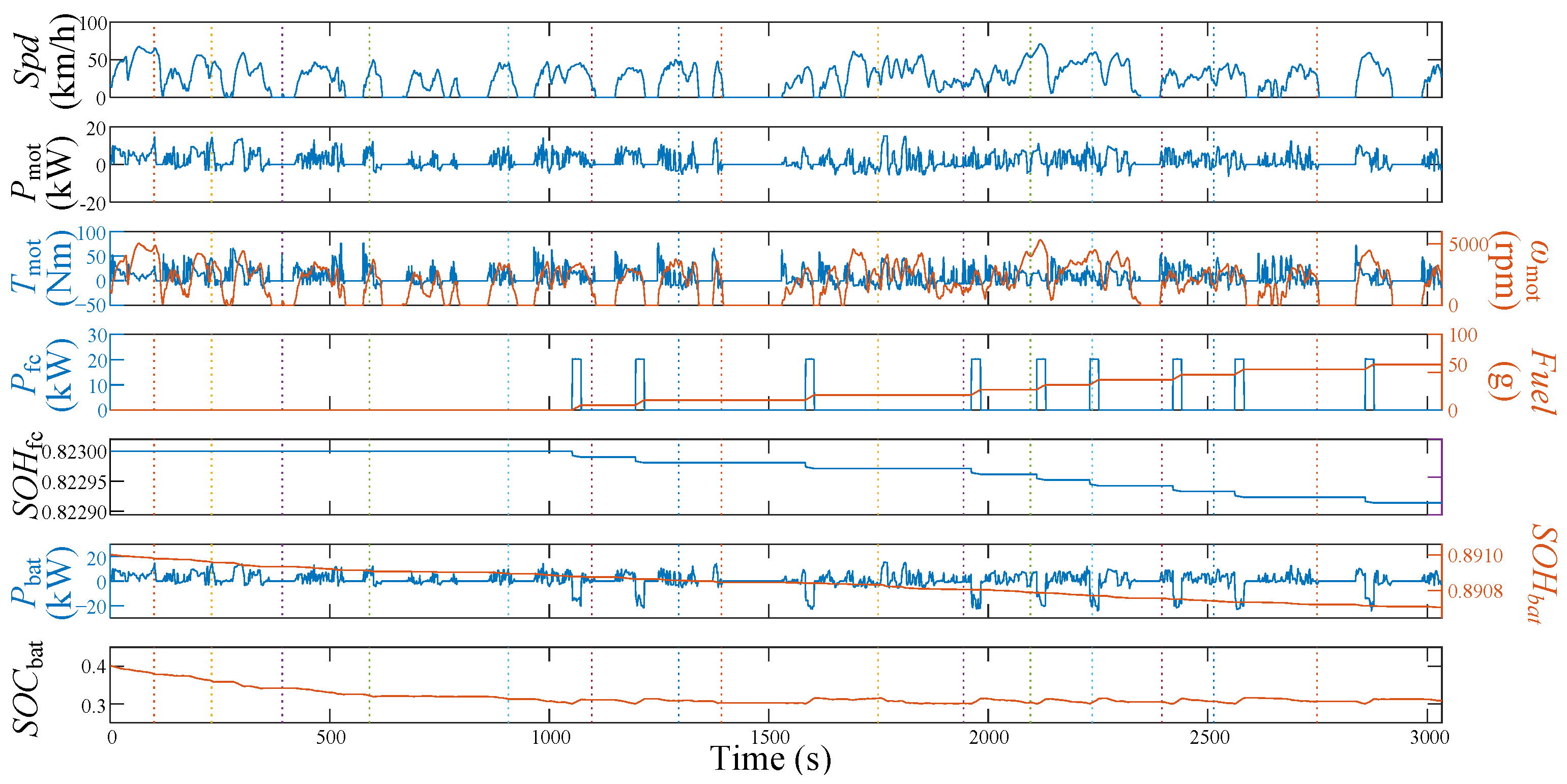
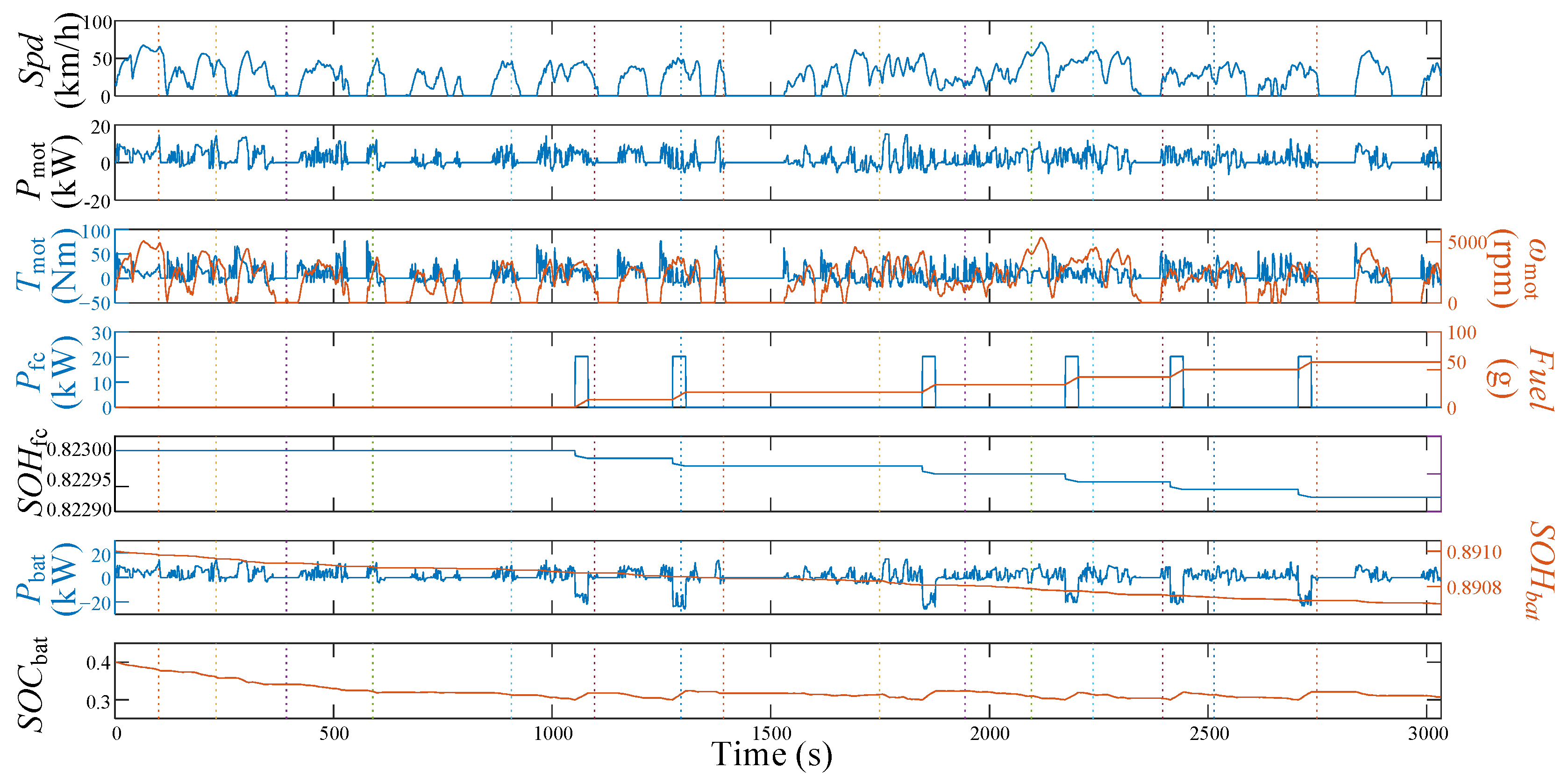
| Parameter Name | Results for Figure 18 | Results for Figure 19 |
|---|---|---|
| Min charging time Tmin (s) | 20 | 30 |
| Actual SOCinit | 0.4 | 0.4 |
| Actual SOCend | 0.3084 | 0.3076 |
| Fuel H2 (g) | 60.5 | 59.9 |
| Fuel H2 cost (RMB) | 2.42 | 2.39 |
| ΔSOHfc | 8.593 × 10−5 | 6.488 × 10−5 |
| ΔSOHfc_start | 6.237 × 10−5 | 4.158 × 10−5 |
| ΔSOHfc cost (RMB) | 2.58 | 1.95 |
| ΔSOHbat | 2.950 × 10−4 | 2.978 × 10−4 |
| ΔSOHbat cost (RMB) | 1.98 | 2.00 |
| Overall cost (RMB) | 6.98 | 6.34 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Guo, Q.; Song, J. Internet-Distributed Hardware-in-the-Loop Simulation Platform for Plug-In Fuel Cell Hybrid Vehicles. Energies 2023, 16, 6755. https://doi.org/10.3390/en16186755
Zhang Y, Guo Q, Song J. Internet-Distributed Hardware-in-the-Loop Simulation Platform for Plug-In Fuel Cell Hybrid Vehicles. Energies. 2023; 16(18):6755. https://doi.org/10.3390/en16186755
Chicago/Turabian StyleZhang, Yi, Qiang Guo, and Jie Song. 2023. "Internet-Distributed Hardware-in-the-Loop Simulation Platform for Plug-In Fuel Cell Hybrid Vehicles" Energies 16, no. 18: 6755. https://doi.org/10.3390/en16186755
APA StyleZhang, Y., Guo, Q., & Song, J. (2023). Internet-Distributed Hardware-in-the-Loop Simulation Platform for Plug-In Fuel Cell Hybrid Vehicles. Energies, 16(18), 6755. https://doi.org/10.3390/en16186755