1. Introduction
The electrification of mobility is seen as an important step towards a reduction in greenhouse gas emissions [
1]. More specifically, the electrification of company car fleets is considered particularly beneficial since company cars have a higher annual mileage and a shorter ownership period compared to privately owned cars [
2,
3]. Compared to uncontrolled charging, a smart charging strategy [
4] can not only help to reduce the cost of a fleet of electric vehicles (EVs) but also relieve the power grid [
5]. The operator of an EV fleet might not only decide how the EVs are charged but also how they are used, i.e., which EV is used in which time period.
In the present paper, the problem of simultaneously planning the charging and usage of a fleet of shared EVs is considered. More precisely, a fleet of EVs, which are charged at a common site and a set of vehicle reservations is considered. The problem consists in optimizing the charging schedule of the EVs and the assignment of vehicle reservations to individual EVs in order to maximize the utilization of the EVs for serving reservations while keeping the charging cost low.
There are numerous works regarding the optimization of EV charging plans considering different objectives and constraints. For example, Jin et al. [
6] consider the use of EVs for the provision of regulation services. Igualada et al. [
7] describe how EV charging can be integrated into the management of a microgrid. Franco et al. [
8] propose an approach for EV charging planning taking the stability of the distribution network into account. Naharudinsyah and Limmer [
9] integrate trading on a real-time electricity market into the charging planning. Schaden et al. [
10] consider in the charging planning that, especially for fast charging, the maximum charging power decreases nonlinearly with an increasing state of charge. In most works, linear programming or mixed integer linear programming (MILP) is employed for the optimization of EV charging plans.
Furthermore, there are a number of works that plan the use of EVs in terms of routes, including recharging operations along the routes [
11]. Different exact approaches, such as branch-and-cut [
12], branch-price-and-cut [
13], and branch-and-cut supported by simulated annealing [
14] as well as heuristic approaches such as the variable neighborhood search algorithm [
15], adaptive large neighborhood search [
16], and deterministic annealing [
17] have been proposed for the EV routing problem.
As mentioned before, in the present work, the planning of reservation assignments instead of routes is considered. This problem was already investigated by Varga et al. [
18]. They showed that a MILP approach can effectively solve the problem as long as the number of considered EVs and reservations is not too high but that this approach scales poorly with increasing problem size. The authors, therefore, proposed an improved exact approach based on Benders decomposition [
19] supported by a heuristic and compared it to the standard MILP approach on problem instances with up to 100 EVs and 1600 reservations. Later, Limmer et al. [
20] proposed a hybrid evolutionary approach for the EV fleet scheduling problem, where the assignment of EVs to reservations is optimized with an evolutionary algorithm, and in the fitness evaluation, linear programming is used to optimize a charging plan for the fixed reservation assignment. Furthermore, the authors described two surrogate-based variants of the approach. Experiments on some of the largest problem instances considered in [
18] showed that the proposed evolutionary approach—especially the surrogate-based variants—notably outperforms the standard MILP approach, as well as the Benders decomposition approach from, [
18] on these problem instances from a heuristic perspective. In earlier works, Betz et al. [
21] proposed a MILP approach and Sassi and Oulamara [
22] proposed a problem-specific heuristic for the EV fleet scheduling problem. However, these works considered problem variants other than the variant considered in the present work and the proposed approaches are not directly applicable to the problem variant considered here.
In this work, a large neighborhood search (LNS) [
23] approach is proposed for the EV fleet scheduling problem. LNS is a popular heuristic for combinatorial optimization problems. It traverses the search space by iteratively destroying and repairing parts of the so-far best-found solution. LNS has been successfully applied to different problems such as vehicle routing [
24], job scheduling [
25], and placement of service points [
26]. The proposed LNS employs a MILP-based repair operator. The approach is evaluated and compared to earlier approaches in experiments on the problem instances from [
20]. In order to investigate the effect of the employed destroy operator on the performance of the proposed approach, three different destroy operators are considered in the experiments. The experimental results show that the proposed approach significantly outperforms earlier methods.
The rest of the paper is structured as follows:
Section 2 describes the considered problem in detail. In
Section 3, the LNS is explained.
Section 4 describes the setup of the experiments and presents and discusses obtained results. Finally,
Section 5 provides a summary and draws conclusions.
2. Problem Description
The problem consists in planning the charging and usage of a homogeneous fleet of N EVs over a planning horizon of T discrete time steps of length . Each EV can be charged with a maximum power of kW, has a battery capacity of kWh, and has a certain initial battery level of kWh at the beginning of the planning horizon. The EVs can be charged at a common site with a certain electrical base load and photovoltaic (PV) energy production. In time steps t with PV overproduction, the corresponding surplus energy can be used for charging the EVs. Let be zero for time steps t without overproduction. Additionally to surplus energy, energy from the power grid can be used for EV charging, where time-varying prices have to be paid for the grid energy. Let denote the energy price in monetary units per kWh in time step t. Concerning the usage of the vehicle fleet, a set of R vehicle reservations is given. Each reservation requests an arbitrary vehicle for a time period starting with a certain time step and ending with a certain time step . The usage of an EV for serving a reservation is assumed to consume a certain amount of energy.
The charging of the EVs in conjunction with the assignment of EVs to reservations should be optimized according to the following formal model:
subject to
| | | (2) |
| | (3) |
| | (4) |
|
| (5) |
|
| (6) |
|
| (7) |
|
| (8) |
|
| (9) |
|
| (10) |
|
| (11) |
Binary variables indicate whether a reservation r is assigned to EV n. Note that not all reservations need to be assigned to an EV. Unassigned reservations are indicated by binary variables , and they are, for example, served by rented or remaining combustion engine cars. Variables reflect the charging powers for each EV n in each time step t. Moreover, variables and denote the amount of grid and surplus energy, respectively, used for EV charging in time step t. Last but not least, variables denote the battery levels of each EV n in each time step t. The objective function (1) is a weighted sum of three sub-objectives: The first term minimizes the amount of energy corresponding to unassigned reservations, which is equivalent to maximizing the amount of used energy covered by EVs. The second term minimizes the energy cost. Finally, the third term maximizes the battery levels of the EVs at the end of the planning horizon in order to increase the chances that reservations arriving in the future can be served by EVs. Constraints (2) ensure that each reservation r is either assigned to an EV or is set to one. Constraints (3) ensure that an EV is not charged in time steps in which it is used for a reservation; moreover, they prevent an EV from being assigned to two reservations overlapping in time. Constraints (4) and (5) set the battery levels of the EVs in the first and the following time steps, respectively. Lastly, Constraints (6) ensure the energy balance.
3. LNS Approach
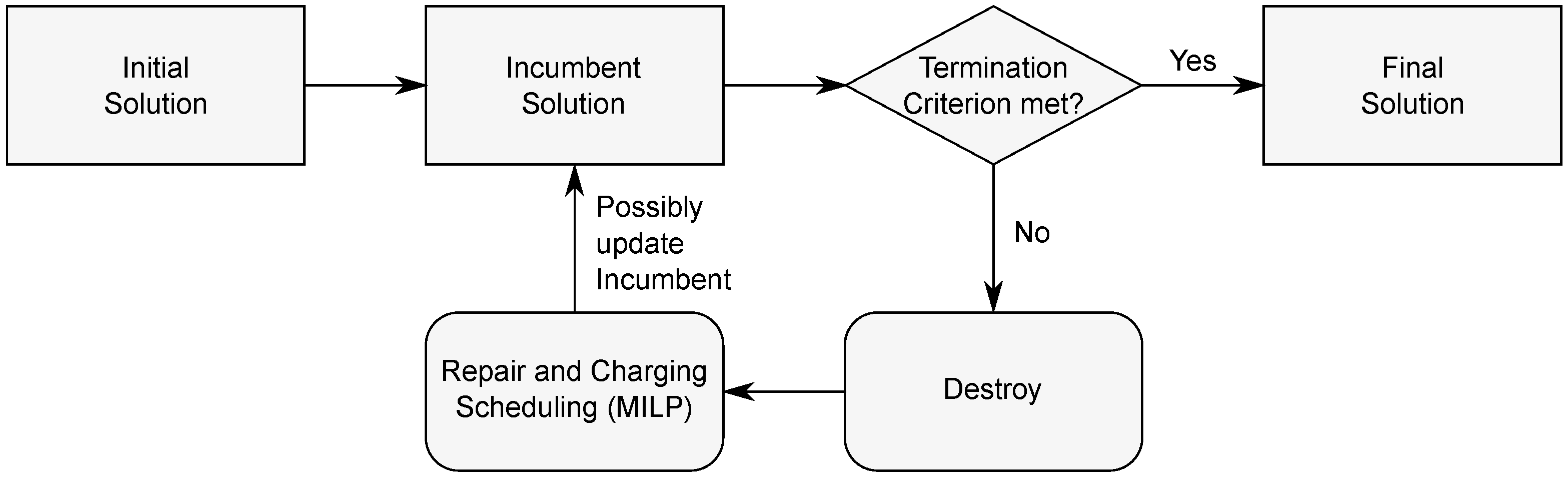
Large neighborhood search is a popular destroy-and-repair heuristic. Starting from an initial solution, it iteratively destroys a part of the currently best solution and repairs it. If the resulting solution is better than the currently best solution, the currently best solution is updated; otherwise, the resulting solution is rejected. The workflow of the employed LNS is illustrated in
Figure 1 and outlined in Algorithm 1. In the following, the used operations are explained in detail.
| Algorithm 1: LNS Approach |
 |
3.1. Initialization
The LNS starts with computing for each reservation
the energy consumption
per time step of its duration and sorting the reservations in non-increasing order of their respective
values. The sorted reservations are then passed to a
basic insertion operator in order to compute an initial solution, which is outlined in Algorithm 2. Reservation assignments are encoded as a list
of
N lists, where
contains the reservations assigned to vehicle
n for
. The basic insertion operator starts with an empty reservation assignment. It then iterates over the reservations in their passed order, and for each reservation
r, it iterates over the EVs and adds
r to the reservation assignments of the first EV for which the resulting reservation assignment is feasible. A reservation assignment of an EV is feasible if the assigned reservations do not overlap in time and there is a charging schedule that allows the EV to satisfy the energy requirements of the assigned reservations. The latter can be determined by simply evaluating whether the energy requirements are satisfied if the EV is charged uncontrolled, i.e., with maximum possible charging power, in all time steps in which it is not used for a reservation. The basic insertion operator returns the resulting reservation assignment and the reservations it could not assign. The order in which reservations are passed to the insertion operator has a major impact on the result. In particular, reservations at the beginning of the passed list have a higher chance to be assigned to an EV than reservations at the end of the passed list. This is the reason why reservations are passed in decreasing order of their energy consumption per time step of duration. Assigning a reservation with a high energy consumption contributes much to the first term of the objective function (
1) and a short duration increases the chance that further reservations can be assigned.
| Algorithm 2: Basic insertion operator |
 |
3.2. Evaluation
After an initial solution has been determined by the basic insertion, the LNS computes its objective value. In order to compute the second and third term of the objective function, the charging of the EVs has to be scheduled. This is performed by optimizing the charging schedule with linear programming (LP) for the reservation assignment as encoded in the solution. More precisely, the following optimization problem is solved:
subject to:
|
|
| (13) |
|
| (14) |
|
| (15) |
|
| (16) |
|
| (17) |
|
| (18) |
|
| (19) |
|
| (20) |
where
is the set of reservations assigned to EV
n, and
is the set of all time steps in which the reservations assigned to EV
n are active. This problem corresponds to the original problem (1)–(11) with binary variables
and
set to fixed values. Since all remaining variables are continuous, this residual problem can indeed be efficiently solved with linear programming. Thus, one can see the employed approach as a bi-level approach, where at the outer level the reservation assignment is optimized with LNS and at the inner level the EV charging is optimized with LP.
3.3. Destroy
The main loop of the LNS starts with destroying the currently best solution by removing, i.e., unassigning, a number of reservations. In preliminary experiments, different strategies for selecting the reservations to remove were evaluated. The following three destroy operators yielded the best results and are considered in the experiments described later: random destroy, relatedness destroy and no overlap destroy.
As the name suggests, the random destroy operator selects the reservations to remove uniformly at random. The relatedness destroy operator selects reservations with similar properties analogous to the destroy operator proposed by Shaw [
24] for vehicle routing problems. Its working principle is outlined in Algorithm 3. The first reservation is selected uniformly at random. Further reservations are selected by iteratively choosing a random reservation
from the already selected ones and selecting a new reservation that is similar to
. Two reservations are assumed to be similar if they span a similar time period and have similar energy requirements. Thus, a difference
between two reservations is computed by
with weights
and
. The relatedness destroy operator sorts the so far unselected reservations in non-decreasing order of their difference to
and selects the element at position
(rounded to the nearest integer) of the resulting sorted list
L, where
y is sampled uniformly from the interval
and
p is a parameter. The higher the value of
p, the more selective and less random the operator gets. Shaw recommends a value between three and five for
p [
24].
| Algorithm 3: Relatedness destroy operator |
 |
The no overlap destroy operator selects reservations with the goal that the selected reservations overlap only a little in time. This is outlined in Algorithm 4. Again, a first reservation is selected uniformly at random, and then iteratively a reservation is randomly selected from all reservations that do not overlap with the last selected reservation. If there is no reservation without overlap with the last selected reservation, the next reservation is chosen uniformly at random from all remaining reservations.
| Algorithm 4: No overlap destroy operator |
 |
3.4. Repair
After the currently best solution is destroyed with the help of one of the destroy operators, it is repaired by trying to assign so far unassigned reservations. For this, an operator such as the basic insertion operator (Algorithm 2) could be used. However, it turned out to be more effective to use a MILP approach for the repair. Hence, the repaired solution is determined by solving problem (1)–(11) through MILP, where the reservation assignment is partly fixed. More specifically, variables and belonging to reservations r that are assigned in the destroyed solution are fixed according to the assignment and the remaining variables and belonging to unassigned reservations r are optimized. Since the complete objective value is already computed by this MILP approach, line 7 of Algorithm 1, the determination of the charging schedule, is actually performed as part of the repair operator in line 6. In preliminary experiments, the MILP repair operator performed reasonably fast. However, since in some situations it can take a long time to find the proven globally optimal solution, a time limit of 20 s is set for the MILP repair in the experiments described later.
If the repaired solution is better than the current incumbent solution in terms of the objective value, it replaces the incumbent (lines 8–12 in Algorithm 1). The main loop of the LNS is executed until a certain termination condition is met and the best-found solution is returned. In the experiments, a time limit is used as a termination condition.
5. Summary and Conclusions
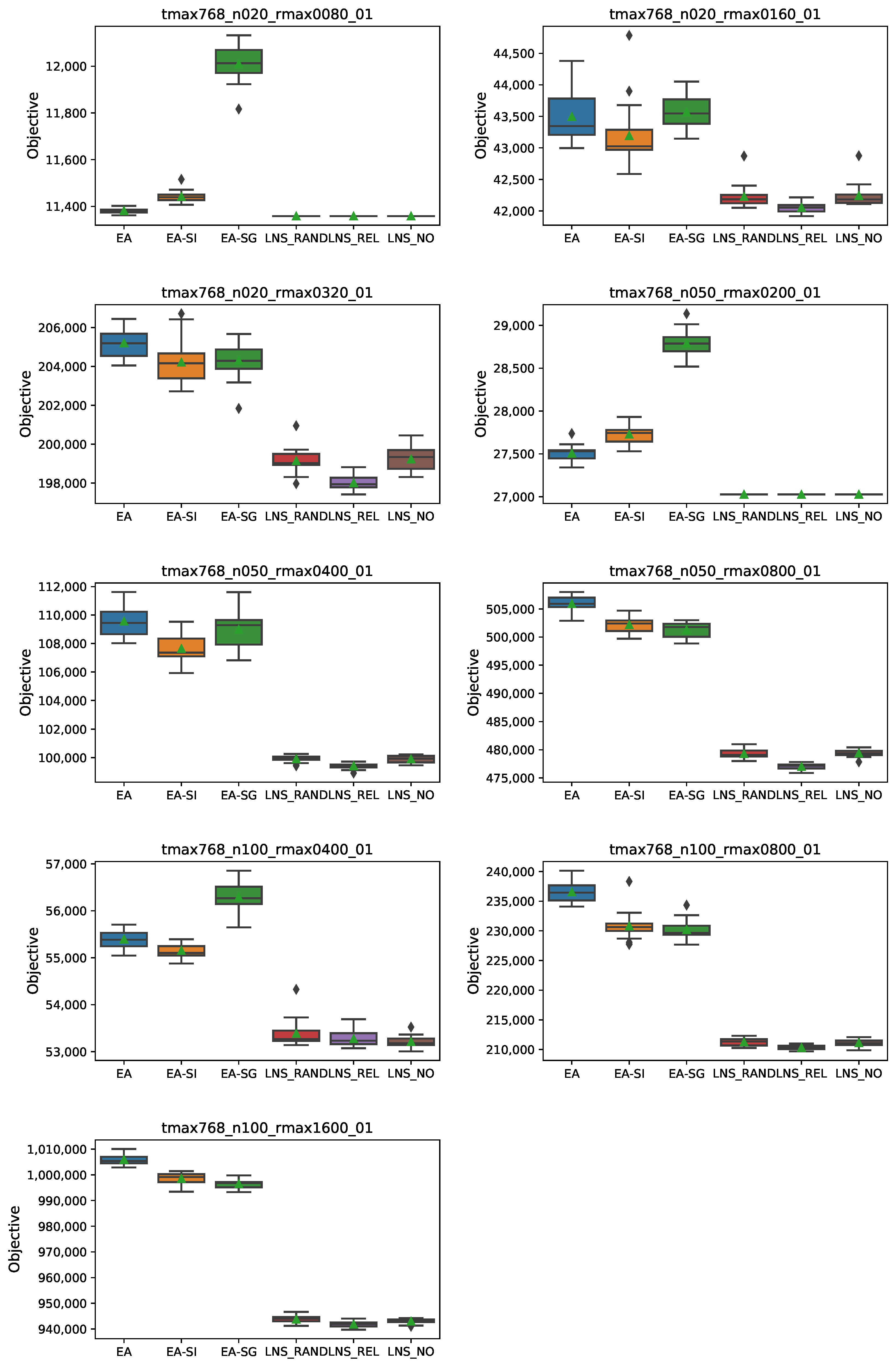
The present work proposed a large neighborhood search approach with a mixed integer linear programming based repair operator for the scheduling of a fleet of shared electric vehicles. Three different destroy operators were evaluated: random destroy, relatedness destroy, and no overlap destroy. The experiments have shown that the proposed approach clearly outperforms not only a standard MILP approach but also a state-of-the-art evolutionary computation-based approach on large instances of the problem yielding between 0.2% and 8.6% better solutions. Of the three investigated destroy operators, relatedness destroy performed best, although it results in the highest runtimes of the insertion operator. On 8 of the 9 considered problem instances, it yielded the best results after a runtime of 60 min. The no overlap destroy operator performed second best and the random destroy operator performed worst. However, also with the random destroy operator, the proposed approach significantly outperformed the evolutionary approach on all considered combinations of time limits and problem instances except for one.
In practice, EV fleet scheduling requires predictions of future PV overproduction, of the energy consumptions corresponding to reservations, and maybe of future electricity prices. A limitation of previous approaches and the approach proposed in the present work is that they do not take uncertainties in these predictions into account. Thus, a potential future work could be to investigate ways to make the approach robust regarding such uncertainties. Another direction of future work could be to develop more efficient destroy operators. The experiments have shown that the choice of the destroy operator has a notable impact on the performance. In recent work, it has been demonstrated that it is possible to learn efficient destroy operators with the help of a data-driven approach [
28]. Another question, which could be investigated in the future, is how the EV fleet scheduling performs in a scenario that is more realistic than the synthetic benchmark instances used in the present work.











{kind=link}
{kind=link}