
Operational Stability of Hydropower Plant with Upstream and Downstream Surge Chambers during Small Load Disturbance



Abstract
:1. Introduction
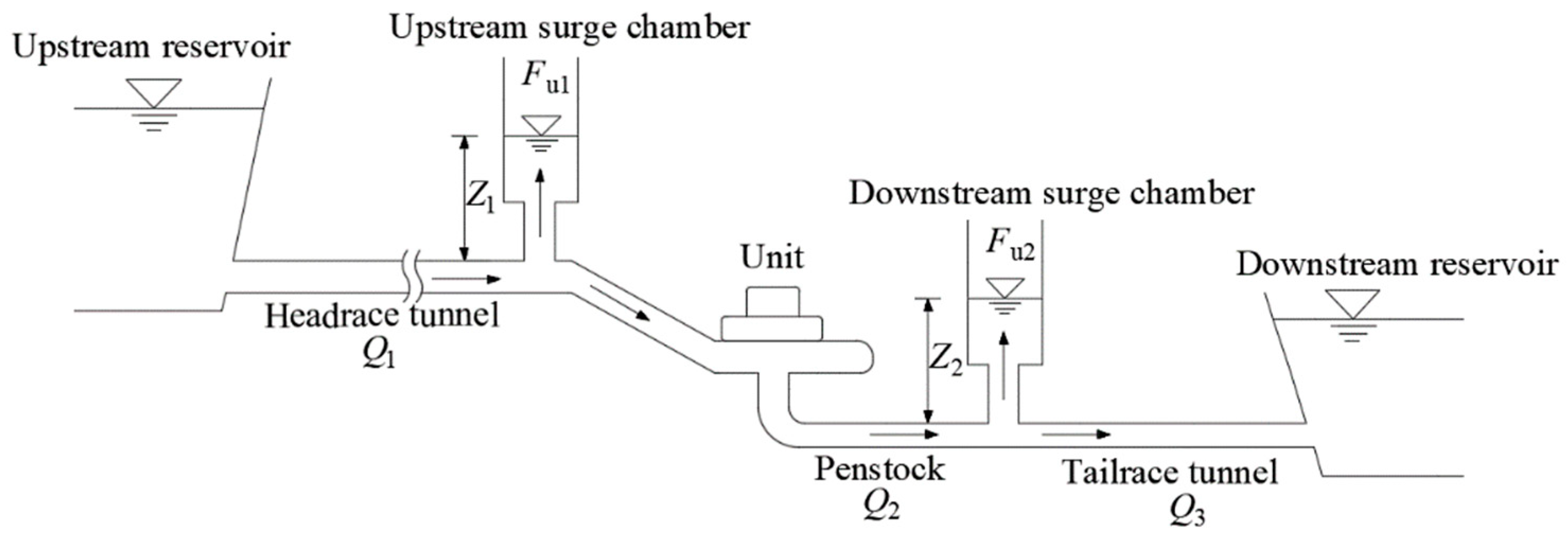
2. Mathematical Model
3. Stability Analysis of the HPUDSC System
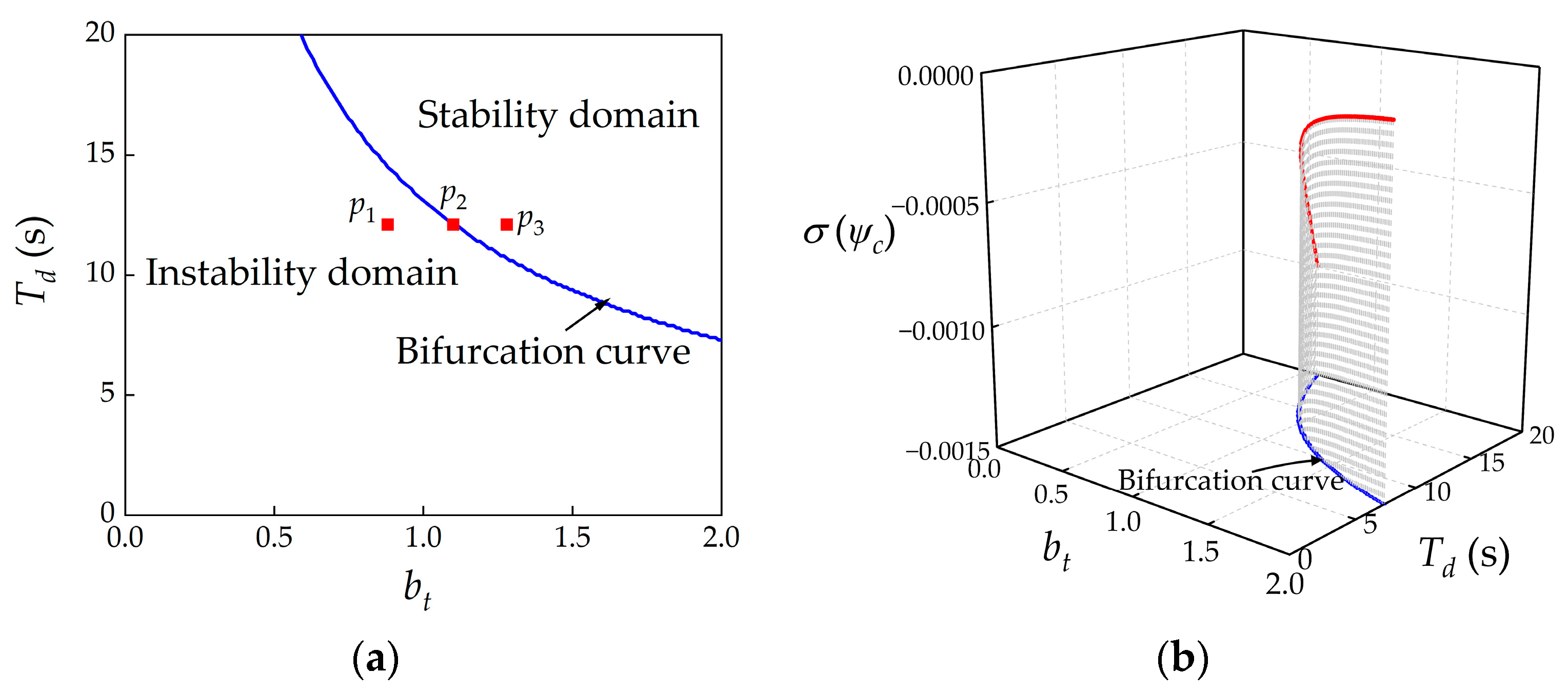
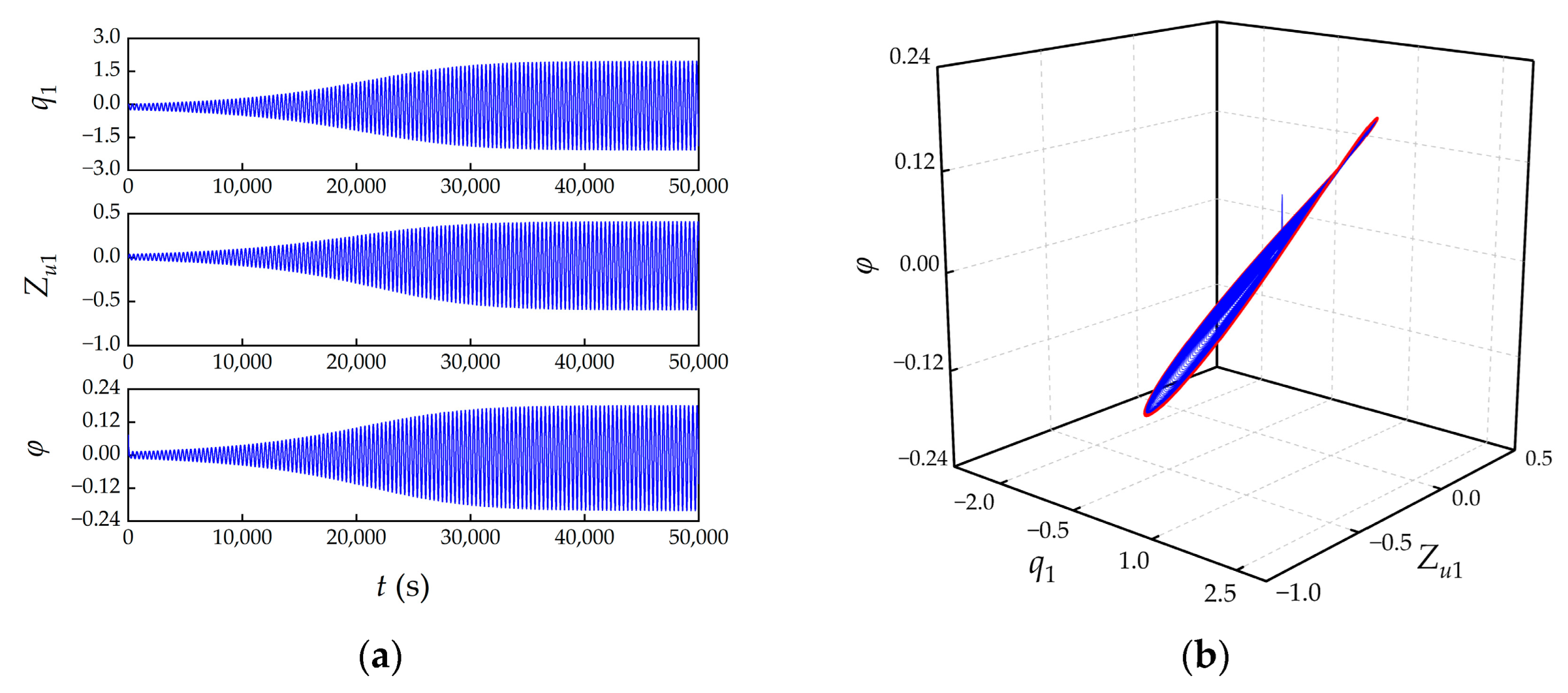
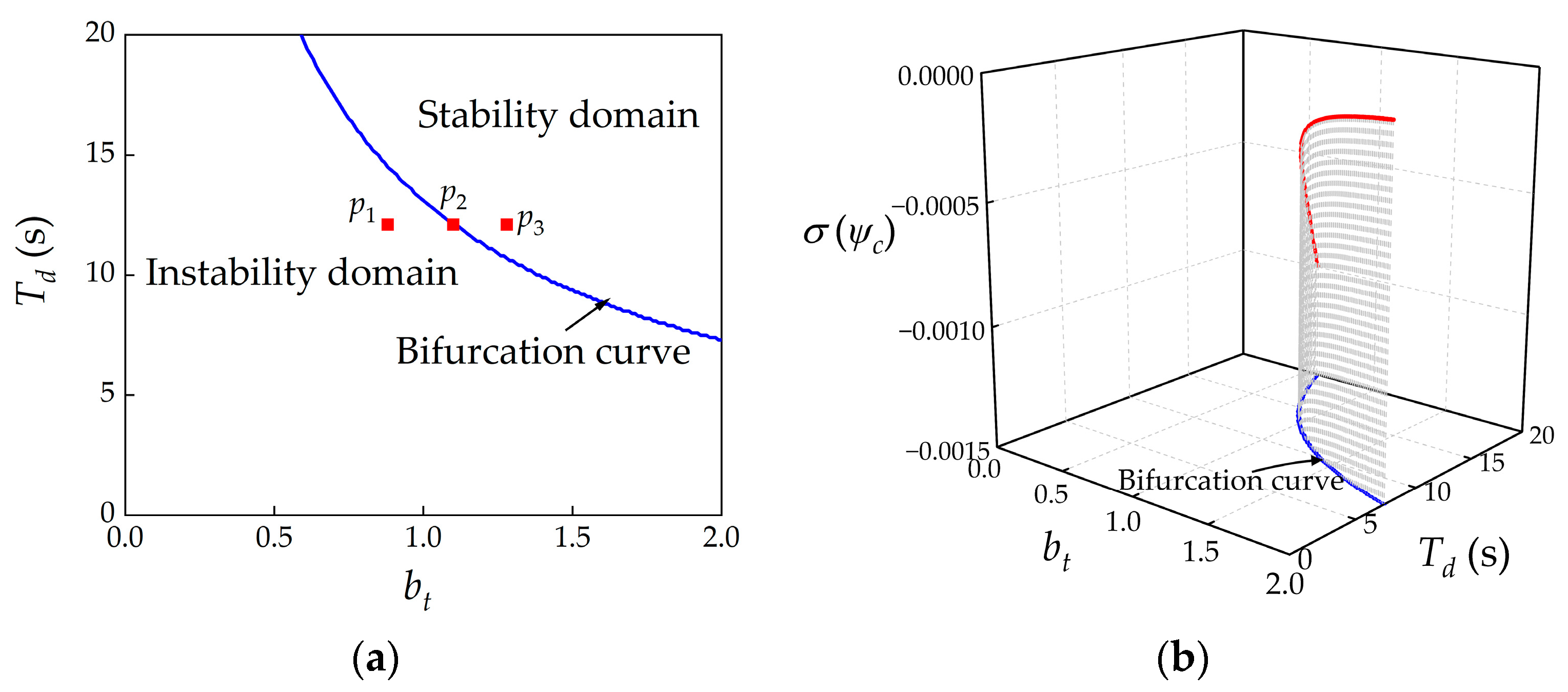
3.1. Hopf Bifurcation Analysis
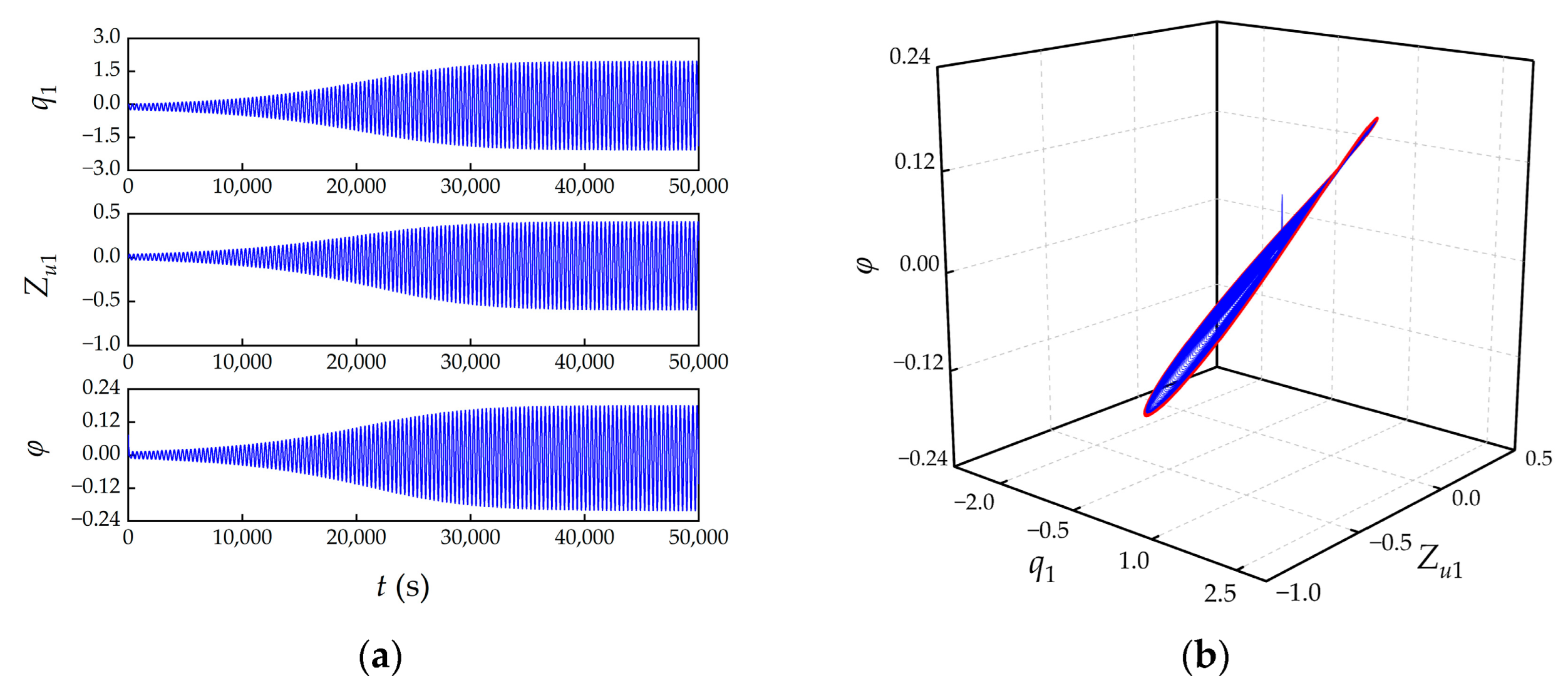
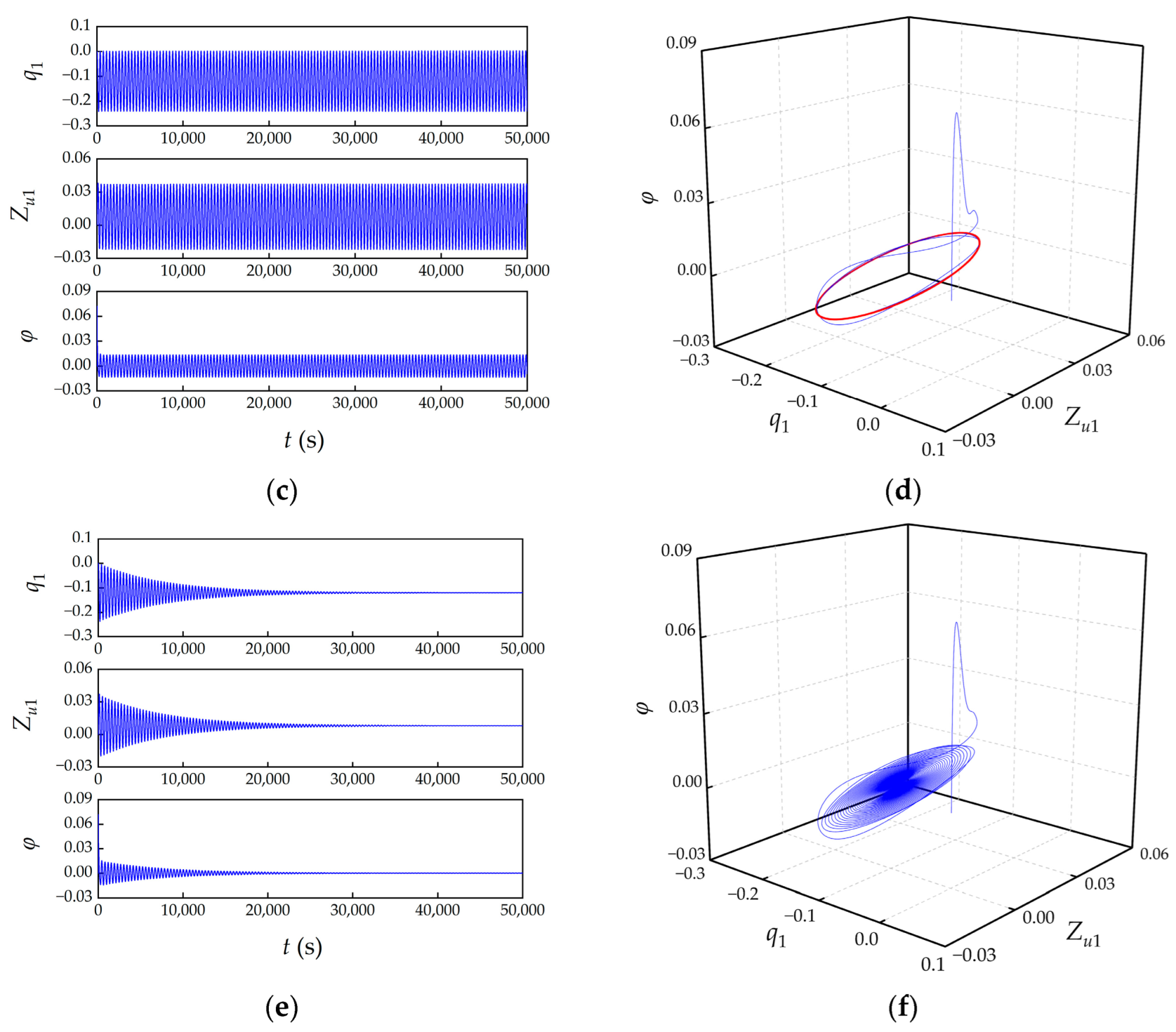
3.2. Case Study
4. Influencing Factors on the Stability of the HPUDSC System
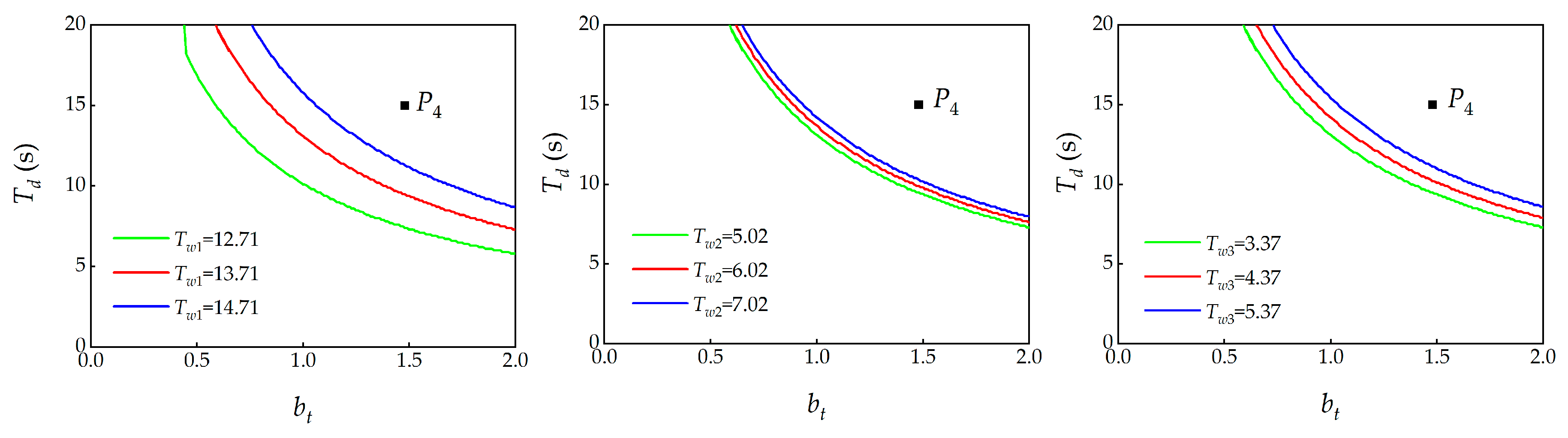
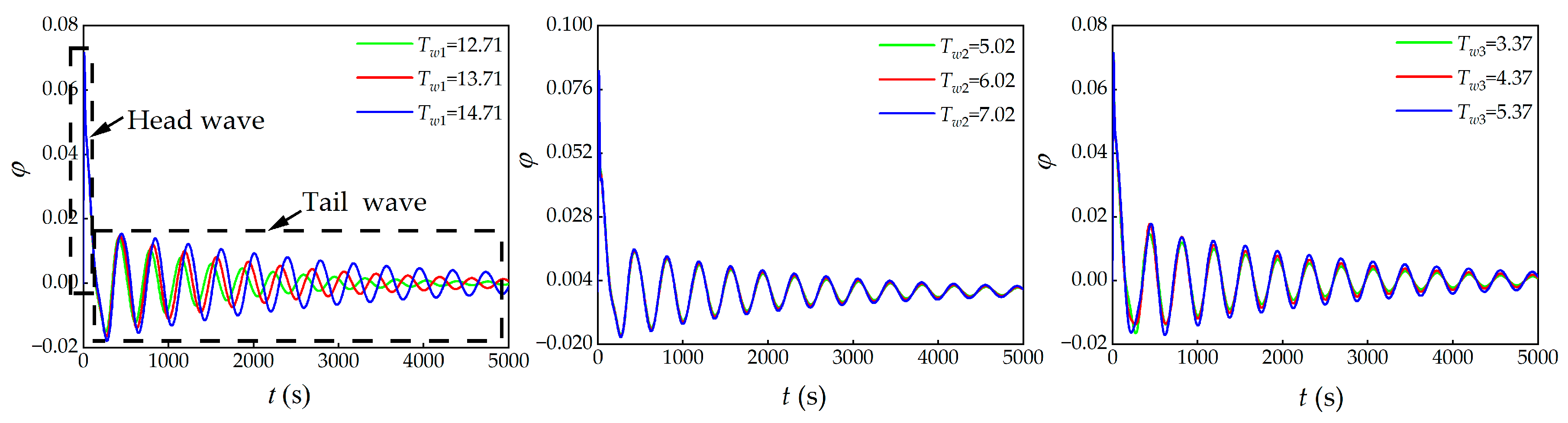
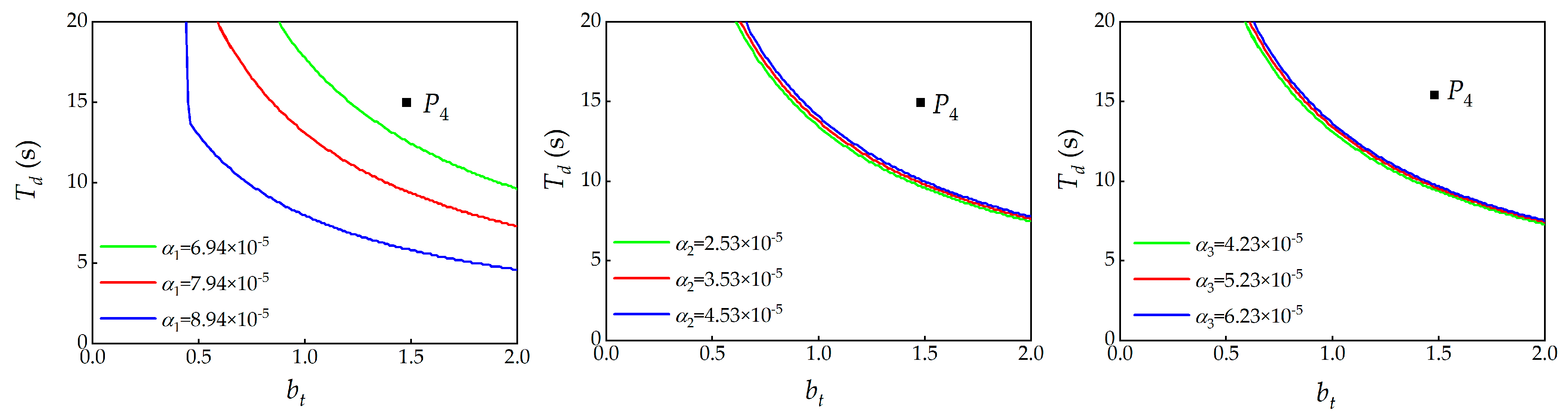
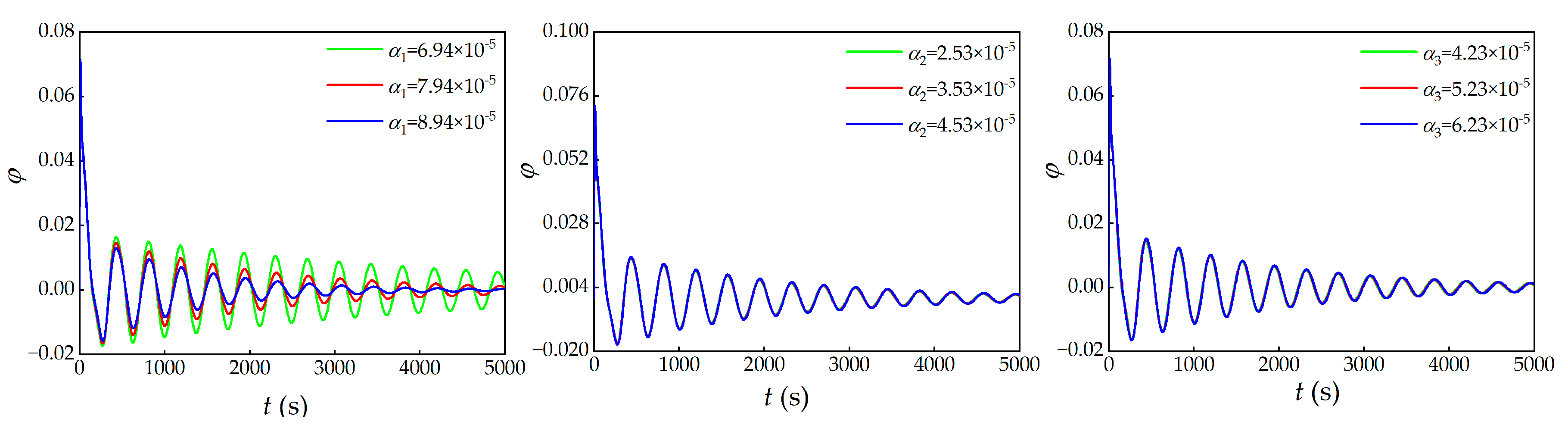
4.1. Influence of Flow Inertia on the Stability Domain and Dynamic Behavior
4.2. Influence of Head Loss on the Stability Domain and Dynamic Behavior
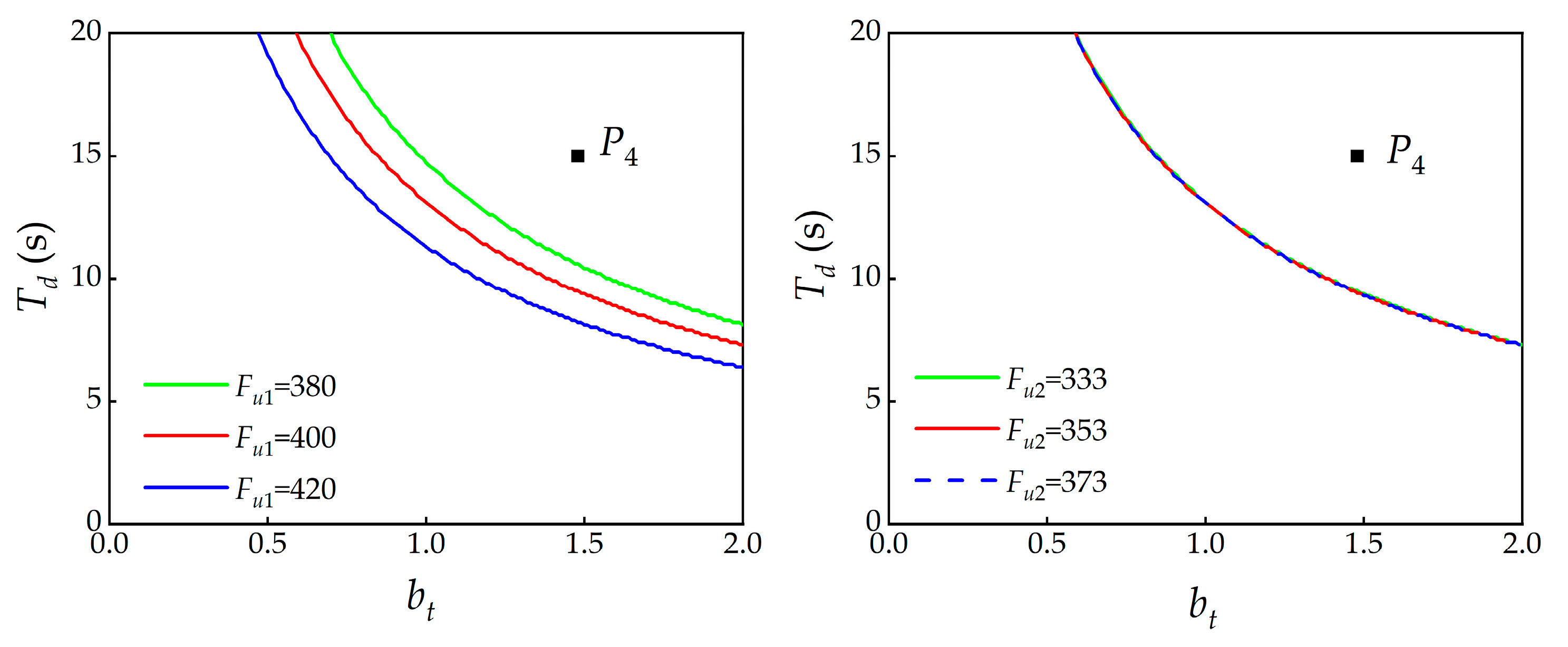
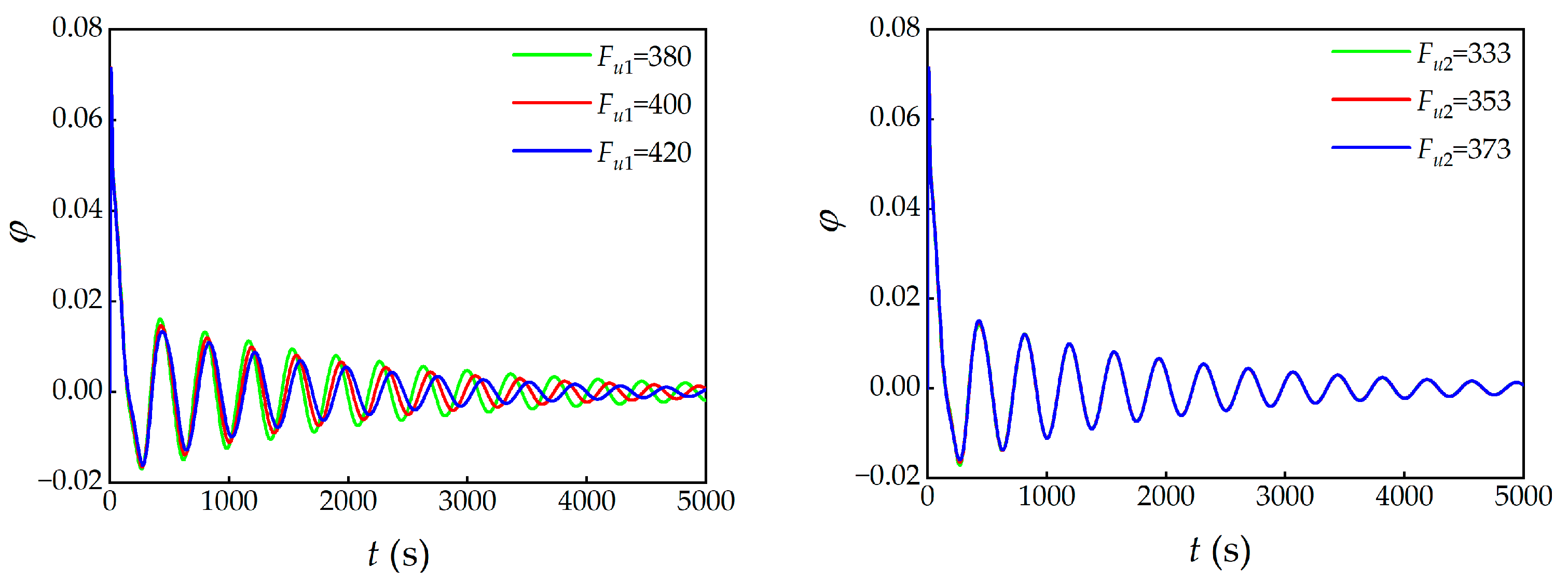
4.3. Influence of Areas of USC and DSC on the Stability Domain and Dynamic Behavior
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| A1, A2, A3 | area of headrace tunnel, penstock and tailrace tunnel, [m2] |
| bt | temporary speed droop constant, [pu] |
| Fu1, Fu2 | area of USC and DSC, [m2] |
| HT | working head of turbine, [m] |
| ht | dimensionless deviation of working head of turbine, [pu] |
| L1, L2, L3 | length of headrace tunnel, penstock and tailrace tunnel, [m] |
| MT | kinetic moment of turbine, [N·m] |
| MG | resisting moment of turbine, [N·m] |
| mt | dimensionless deviation of kinetic moment of turbine, [pu] |
| mg | dimensionless deviation of kinetic moment of turbine, [pu] |
| n | rotational speed of turbine, [rad/s] |
| QT | working discharge of turbine, [m3/s] |
| Q1, Q2, Q3 | discharge in headrace tunnel, penstock and tailrace tunnel, [m3/s] |
| qt | dimensionless deviation of working discharge of turbine, [pu] |
| q1, q2, q3 | dimensionless deviation of discharge in headrace tunnel, penstock and tailrace tunnel, [pu] |
| S5-10 | characteristic coefficients of turbine, [pu] |
| Sp | load self-regulation coefficient, [pu] |
| Ta | mechanical starting constant, [s] |
| Td | dashpot time constant, [s] |
| Tw1, Tw2, Tw3 | flow inertia constant in headrace tunnel, penstock and tailrace tunnel, [s] |
| Z1, Z2 | water level in USC and DSC, [m] |
| Zu1, Zu2 | dimensionless deviation water level in USC and DSC, [pu] |
| α1, α2, α3 | head loss coefficient in headrace tunnel, penstock and tailrace tunnel, [s2/m5] |
| μ | dimensionless deviation of guide vane open degree, [pu] |
| τ | guide vane open degree, [°] |
| φ | dimensionless deviation of turbine rotational speed, [pu] |
References
- Sebestyen, V. Renewable and Sustainable Energy Reviews: Environmental impact networks of renewable energy power plants. Renew. Sustain. Energy Rev. 2021, 151, 111626. [Google Scholar] [CrossRef]
- Nzotcha, U.; Nsangou, J.C.; Kenfack, J.; Ngohe, P.S.; Hamandjoda, O.; Bignom, B. Combining electric energy storage and deep-lake degassing by means of pumped hydropower. Appl. Energy 2021, 304, 117839. [Google Scholar] [CrossRef]
- Schulz, C.; Saklani, U. The future of hydropower development in Nepal: Views from the private sector. Renew. Energy 2021, 179, 1578–1588. [Google Scholar] [CrossRef]
- Jin, X.; Liu, B.; Liao, S.; Cheng, C.; Li, G.; Liu, L. Impacts of different wind and solar power penetrations on cascade hydroplants operation. Renew. Energy 2022, 182, 227–244. [Google Scholar] [CrossRef]
- Ruggles, H.T.; Caldeira, K. Wind and solar generation may reduce the inter-annual variability of peak residual load in certain electricity systems. Appl. Energy 2022, 305, 117773. [Google Scholar] [CrossRef]
- Wen, X.; Sun, Y.; Tan, Q.; Tang, Z.; Wang, Z.; Liu, Z.; Ding, Z. Optimizing the sizes of wind and photovoltaic plants comple-mentarily operating with cascade hydropower stations: Balancing risk and benefit. Appl. Energy 2022, 306, 117968. [Google Scholar] [CrossRef]
- Guo, W.; Zhu, D. A review of the transient process and control for a hydropower station with a super long headrace tunnel. Energies 2018, 11, 11. [Google Scholar] [CrossRef] [Green Version]
- Xu, B.; Zhang, J.; Egusquiza, M.; Chen, D.; Li, F.; Behrens, P.; Egusquiza, E. A review of dynamic models and stability analysis for a hydro-turbine governing system. Renew. Sustain. Energy Rev. 2021, 144, 110880. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, J.; Liu, Z.; Wang, Q.; Yu, X. Effect of the nonlinearity of head loss on stability and dynamic performance for hydropower plant with surge tank during small load disturbance. J. Energy Storage 2022, 53, 105182. [Google Scholar] [CrossRef]
- Hu, J.H.; Yang, J.B.; He, X.H.; Zhao, Z.G.; Yang, J.D. Transient analysis of a hydropower plant with a super-long headrace tunnel during load acceptance: Instability mechanism and measurement verification. Energy 2023, 263, 125671. [Google Scholar] [CrossRef]
- Wang, L.; Guo, W.C. Nonlinear hydraulic coupling characteristics and energy conversion mechanism of pipeline-surge tank system of hydropower station with super long headrace tunnel. Renew. Energy 2022, 199, 1345–1360. [Google Scholar] [CrossRef]
- Guo, W.; Liu, Y.; Qu, F.; Xu, X. A review of critical stable sectional areas for the surge tanks of hydropower stations. Energies 2020, 13, 23. [Google Scholar] [CrossRef]
- Yang, W.; Yang, J.; Guo, W.; Zeng, W.; Wang, C.; Saarinen, L.; Norrlund, P. A mathematical model and its application for hydro power units under different operating conditions. Energies 2015, 8, 10260–10275. [Google Scholar] [CrossRef] [Green Version]
- Yang, W.; Norrlund, P.; Chung, C.Y.; Yang, J.; Lundin, U. Eigen-analysis of hydraulic-mechanical-electrical coupling mechanism for small signal stability of hydropower plant. Renew. Energy 2018, 115, 1014–1025. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, D.; Xu, B.; Wang, F. Nonlinear modeling and dynamic analysis of hydro-turbine governing system in the process of load rejection transient. Energy Convers. Manag. 2015, 90, 128–137. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, J.; Chen, S.; Yu, X. Stability analysis and estimation of domain of attraction for hydropower station with surge tank. Chaos Solitons Fractals 2023, 170, 113413. [Google Scholar] [CrossRef]
- Yu, X.; Zhang, J.; Fan, C.; Chen, S. Stability analysis of governor-turbine-hydraulic system by state space method and graph theory. Energy 2016, 114, 613–622. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, J.; Yu, X.; Chen, S.; Xu, H. Safety factor for Thoma stable area considering the governor-turbine-penstock system. J. Hydraul. Eng. 2023, 149, 3. [Google Scholar] [CrossRef]
- Chaudhry, M.H. Applied Hydraulic Transients; Springer: New York, NY, USA, 2014. [Google Scholar]
- Vereide, K.; Svingen, B.; Nielsen, T.K.; Lia, L. The effect of surge tank throttling on governor stability, power control, and hydraulic transients in hydropower plants. IEEE Trans. Energy Convers. 2017, 32, 91–98. [Google Scholar] [CrossRef] [Green Version]
- Zhu, D.; Guo, W. Critical sectional area of surge chamber considering nonlinearity of head loss of diversion tunnel and steady output of turbine. Chaos Solitons Fractals 2019, 127, 165–172. [Google Scholar] [CrossRef]
- Zhang, H.; Guo, P.; Sun, L. Transient analysis of a multi-unit pumped storage system during load rejection process. Renew. Energy 2020, 152, 34–43. [Google Scholar] [CrossRef]
- Liu, Y.; Guo, W. Multi-frequency dynamic performance of hydropower plant under coupling effect of power grid and turbine regulating system with surge tank. Renew. Energy 2021, 171, 557–581. [Google Scholar] [CrossRef]
- Chen, J.P.; Yang, J.D.; Guo, W.C.; Teng, Y. Study on the stability of waterpower-speed control system for hydropower station with upstream and downstream surge chambers based on regulation modes. In Proceedings of the 27th IAHR Symposium on Hydraulic Machinery and Systems (IAHR), Montreal, QC, Canada, 22–26 September 2014. [Google Scholar]
- Cao, L.N.; Ao, J.W.; Wu, D.K.; Li, B.; Zhang, H. Research on regulation quality of hydropower generation system with double surge chambers under small fluctuation. Water Resour. Power 2021, 39, 177–180. (In Chinese) [Google Scholar]
- Wu, F.L.; Guo, W.C.; Fu, S.; Qu, F.L. Hydraulic coupling vibration characteristics and control of hydropower station with upstream and downstream surge tanks. Sustain. Energy Technol. Assess. 2022, 50, 101842. [Google Scholar] [CrossRef]
- Yu, X.; Yang, X.; Liu, Z.; Zhang, J. Mechanism and quantified criteria of stability characteristics of hydropower plants with surge tanks during regulation. Int. J. Electr. Power Energy Syst. 2020, 122, 106160. [Google Scholar] [CrossRef]
- Yu, X.; Yang, X.; Zhang, J. Stability analysis of hydro-turbine governing system including surge tanks under interconnected operation during small load disturbance. Renew. Energy 2019, 133, 1426–1435. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, J.; Liu, Z.; Chen, L.; Yu, X. Surge wave characteristics for hydropower plant with upstream double surge tanks connected in series under small load disturbance. Renew. Energy 2022, 186, 667–676. [Google Scholar] [CrossRef]
- Kuznetsov, Y.A.; Kuznetsov, I.A.; Kuznetsov, Y. Elements of Applied Bifurcation Theory; Springer: Berlin/Heidelberg, Germany, 1998. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| L1/m | L2/m | L3/m | A1/m2 | A2/m2 | A3/m2 | α1/(s2/m5) | α2/(s2/m5) | α3/(s2/m5) | Fu1/m2 |
|---|---|---|---|---|---|---|---|---|---|
| 8711.2 | 1363.2 | 1580.1 | 121.49 | 51.935 | 89.59 | 7.94 × 10−5 | 1.53 × 10−5 | 4.23 × 10−5 | 400 |
| Fu2/m2 | H0/m | Q0/(m3/s) | S5/pu | S6/pu | S7/pu | S8/pu | S9/pu | S10/pu | Sp/pu |
| 353 | 226.1 | 290.8 | 1.66 | 0.35 | −1.4 | 2.61 | −0.61 | −1.4 | 0 |
| Point | bt | Td (s) | Location | Theoretical State |
|---|---|---|---|---|
| P1 | 0.9 | 12.1 | Instability domain | Limit cycle |
| P2 | 1.1 | 12.1 | Bifurcation curve | Limit cycle |
| P3 | 1.3 | 12.1 | Stability domain | Equilibrium point |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Yu, X.; Guo, X.; Zhao, W.; Chen, S. Operational Stability of Hydropower Plant with Upstream and Downstream Surge Chambers during Small Load Disturbance. Energies 2023, 16, 4517. https://doi.org/10.3390/en16114517
Liu Y, Yu X, Guo X, Zhao W, Chen S. Operational Stability of Hydropower Plant with Upstream and Downstream Surge Chambers during Small Load Disturbance. Energies. 2023; 16(11):4517. https://doi.org/10.3390/en16114517
Chicago/Turabian StyleLiu, Yi, Xiaodong Yu, Xinlei Guo, Wenlong Zhao, and Sheng Chen. 2023. "Operational Stability of Hydropower Plant with Upstream and Downstream Surge Chambers during Small Load Disturbance" Energies 16, no. 11: 4517. https://doi.org/10.3390/en16114517
APA StyleLiu, Y., Yu, X., Guo, X., Zhao, W., & Chen, S. (2023). Operational Stability of Hydropower Plant with Upstream and Downstream Surge Chambers during Small Load Disturbance. Energies, 16(11), 4517. https://doi.org/10.3390/en16114517