
Coordinated Control Design for Ethical Maneuvering of Autonomous Vehicles


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction and Motivation
1.1. Ethical Concepts in the Current Literature of Autonomous Vehicle Control
1.2. Ethical Modeling Frameworks in the Current Literature of Autonomous Vehicle Control
1.2.1. Trolley-Based Ethical Frameworks
- One of the most common critique against trolley problem is based on its unrealistic character [43]. For example, paper of Holstein et al. [43] proposes that ethical analysis must be focused on the ethics of complex real-world engineering problems, instead of unsolvable decision making problems. Similarly, [44] presents an overview on realistic ethical challenges of autonomous vehicle control. Paper Cunneen et al. [45] also argues that more realistic ethical frameworks for handling the ethical problems of autonomous vehicles must be found. One of the possible solution is the focusing on technologies related to human-machine interactions, such as, machine perception, classification, and data privacy, which are some distances from the decisionality framing premise of the Moral Machine experiment.
- In spite of unrealistic character of trolley-based ethical framework, it facilitates the understanding of the ethical problem of autonomous vehicle decisions [13,46]. A possible improvement of the classical framework is the testing of human trolley-based decisions in the context of virtual or augmented reality [47,48], which can improve real feeling character for examining human decision process.
- One of the most important criterion of spreading autonomous vehicle technologies is the improving of trust in the technology [50]. Nevertheless, it is not possible to find a general solution on trolley problem, which can be accepted by all participants of the transportation. For example, results of studies in [51] show that vehicle passengers can be more likely to like, use, trust, and communicate with autonomous vehicles programmed to protect self than protect others and be random in a one-passenger-one-pedestrian scenario representing the one-to-one dilemma.
- The starting point in lots of studies is the providing of examinations on human decisions, but the ethical fundamentals of this selection is not straightforward. It can have practical viewpoint, because human-like driving characteristics can improve trust in autonomous driving [8]. Nevertheless, it is related to driving style, and not to the decision itself, see also [52]. Similarly, from the viewpoint of theology, reproducing of human corruption in machines can lead to unethical decisions.
- 6.
- In the classical trolley framework the autonomous vehicle can move on few number of fixed routes, similar to trains. Nevertheless, in case of autonomous road vehicles high number of different trajectories can be generated. From the viewpoint of physical-based vehicle modeling process, lateral motion of road vehicle can be described through kinematic constraints, instead of only geometric constraints in railway systems. Thus, there are lots of decisions on trajectories for the autonomous vehicles [53], which variety motivates the improvement of fixed-route trolley model.
- 7.
- Another limitation in the trolley-based ethical frameworks is the omitting of responses on the motion of autonomous vehicle. Thus, the feedback from pedestrian, cyclist or another vehicle in the situation is not considered in the decision process. An improvement possibility of the trolley-based ethical framework is the involving of more participants with freedom in their decisions. For example, in case of critical traffic situations with multiple autonomous vehicles, an ethical modeling framework must be formed, in which the coordinated motion of autonomous vehicles in the ethical design can be handled. Using coordinated control the cost of the optimal solution can be significantly reduced.
- 8.
- The role of uncertainty and random in autonomous vehicle control and decision process is not considered sufficiently. The measured signals of the vehicle, which are used for decision purposes, can contain disturbances and uncertainties [54]. The motion predictions of the participants in the local traffic have stochastic character [55]. Randomness in the learning process for achieving AI-based agents can also have high impact [56]. Moreover, random also have role in the composing of critical traffic situation from the sides of further participants, see [41]. However, trolley-based ethical frameworks are able to operate with deterministic decisions and fixed outputs. Thus, involving stochastic nature in the ethical models can facilitate discussions on ethical vehicle maneuvering. For example, in the context of autonomous vehicles, theology of randomness and chances [57,58,59] and theology of responsibility [35,37] can be connected.
1.2.2. Trust-Focused Ethical Frameworks
1.2.3. Control-Oriented Ethical Frameworks
1.3. Contributions of the Paper
2. Formulation of Ethical Concept for Autonomous Vehicles
2.1. Achieving Optimal Vehicle Motion Is an Ethical Requirement
2.2. Clarifying Limitations of Vehicle Control Is an Ethical Requirement
2.3. Being Equivalent Participant in Transportation Is an Ethical Requirement
2.4. Handling Transportation Participants Equivalently Is an Ethical Requirement
2.5. Limiting the Number of Participants in a Critical Situation Is an Ethical Requirement
3. Design of Vehicle Control for Achieving Ethical Maneuvering
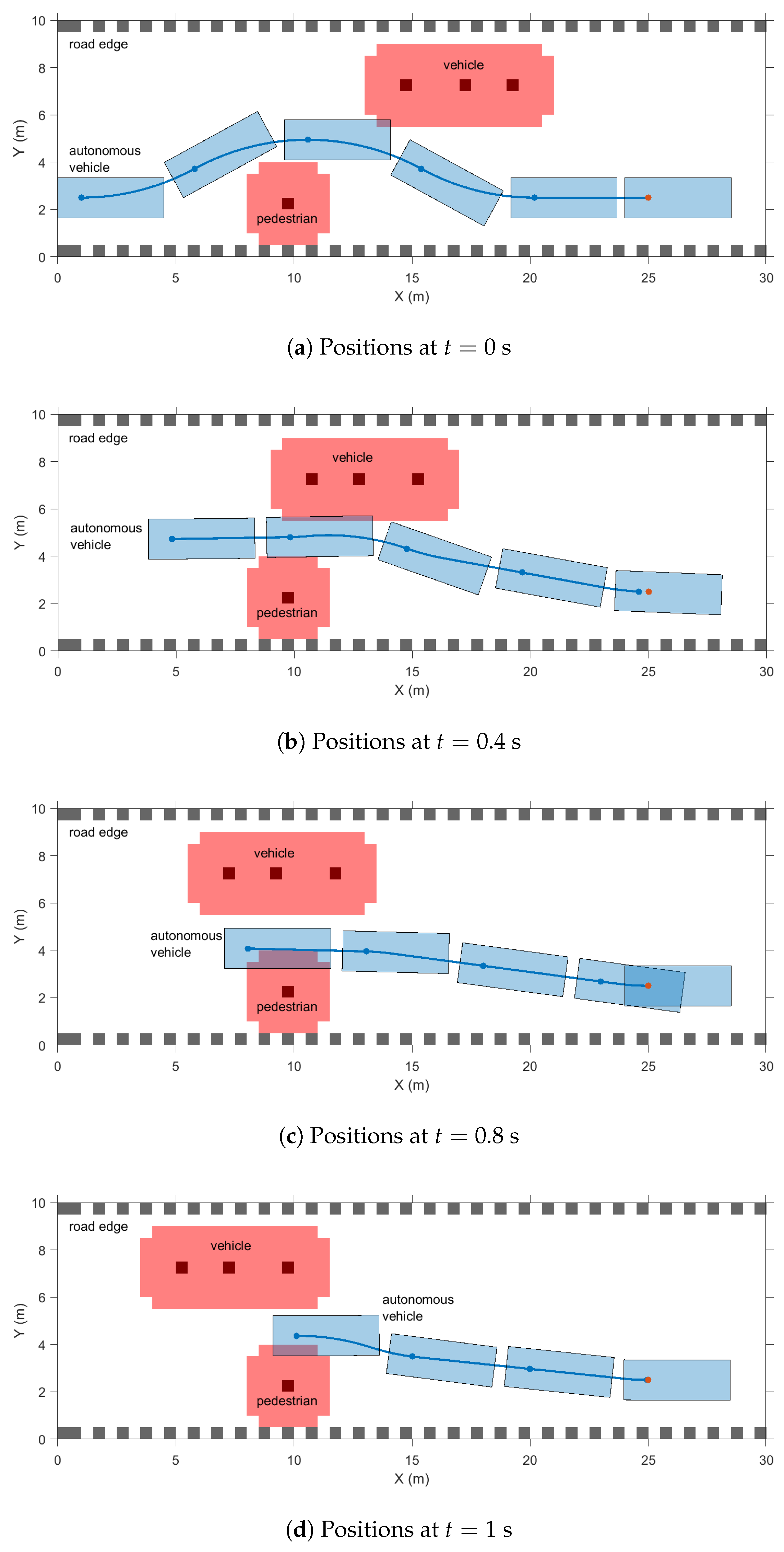
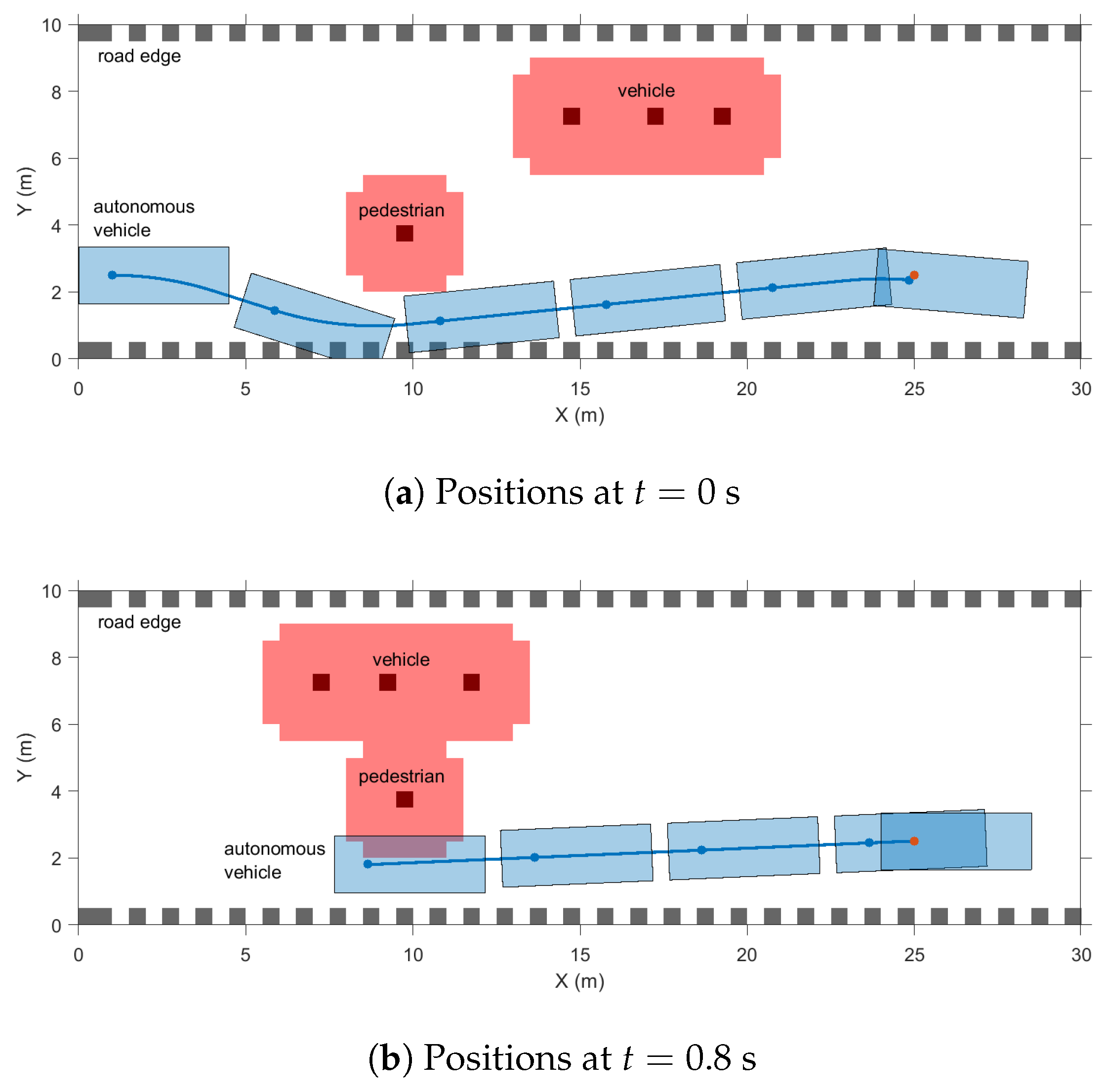
- The vehicle must strive to stay on the road, e.g., moving on sidewalk is forbidden. This requirement protects pedestrians, who are handled as equivalent participants and they have the right to move freely and safely on the sidewalk. Thus, the constraint on the vehicle motion is formed as:where are determined by the geometry of the road on the actual k time step, and is resulted by (9). Remark that in critical situations the use of the unoccupied sidewalk may help to avoid collision with participants on the road. Nevertheless, an ethically maneuvering autonomous vehicle—due to the uncertainties in the measurements—cannot undertake the responsibility of avoiding rules, see the interpretation of hubris above.
- The vehicle control must handle all participants equivalently, such as vehicles, cyclists or crossing pedestrians on the road. Moreover, it is not allowed to distinguish between human participants based on their any characteristics (e.g., age, gender etc.), even if these characteristics using sensor measurements can be estimated. Consequently, all of the participants as avoidable objects must be handled, such aswhere represents the number of objects and are their physical limits in lateral direction. The calculation of physical limits considering the size of the autonomous vehicle can be found in [103].
- If it is not possible the find a feasible trajectory, the autonomous vehicle must be stopped, i.e., maximum braking must be actuated and must be tracked. Although it can lead to a collision, but the motion of the autonomous vehicle for human participants is predictable. It creates the possibility for another participants to defend themselves.
Formulation and Solution of the Control Problem
4. Illustration on the Effectiveness of the Proposed Control Method
5. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gáspár, P.; Németh, B. Predictive Cruise Control for Road Vehicles Using Road and Traffic Information; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Chapman, A.; Fujii, H. The Potential Role of Flying Vehicles in Progressing the Energy Transition. Energies 2022, 15, 7406. [Google Scholar] [CrossRef]
- Resnik, D.B.; Andrews, S.L. A precautionary approach to autonomous vehicles. AI Ethics 2023, 2023, 1–6. [Google Scholar] [CrossRef]
- Qian, L.; Yin, J.; Huang, Y.; Liang, Y. The role of values and ethics in influencing consumers’ intention to use autonomous vehicle hailing services. Technol. Forecast. Soc. Change 2023, 188, 122267. [Google Scholar] [CrossRef]
- Matsas, I.C.; Mintsis, G.; Basbas, S.; Taxiltaris, C. Autonomous Vehicles: Impact on Human Life- A Statistic and Descriptive Overview of Research Results, Using the Delphi Method. In Smart Energy for Smart Transport, Proceedings of the 6th Conference on Sustainable Urban Mobility, CSUM2022, Skiathos Island, Greece, 31 August–2 September 2022; Nathanail, E.G., Gavanas, N., Adamos, G., Eds.; Springer: Cham, Switzerland, 2023; pp. 435–450. [Google Scholar]
- Adamson, G.; Havens, J.C.; Chatila, R. Designing a Value-Driven Future for Ethical Autonomous and Intelligent Systems. Proc. IEEE 2019, 107, 518–525. [Google Scholar] [CrossRef]
- Bonnefon, J.F.; Shariff, A.; Rahwan, I. The social dilemma of autonomous vehicles. Science 2016, 352, 1573–1576. [Google Scholar] [CrossRef]
- Cascetta, E.; Carteni, A.; Di Francesco, L. Do autonomous vehicles drive like humans? A Turing approach and an application to SAE automation Level 2 cars. Transp. Res. Part Emerg. Technol. 2022, 134, 103499. [Google Scholar] [CrossRef]
- Wang, H.; Khajepour, A.; Cao, D.; Liu, T. Ethical Decision Making in Autonomous Vehicles: Challenges and Research Progress. IEEE Intell. Transp. Syst. Mag. 2022, 14, 6–17. [Google Scholar] [CrossRef]
- Awad, E.; Dsouza, S.; Kim, R.; Schulz, J.; Henrich, J.; Shariff, A.; Bonnefon, J.F.; Rahwan, I. The moral machine experiment. Nature 2018, 563, 59–64. [Google Scholar] [CrossRef]
- Furey, H.; Hill, S. MIT’s moral machine project is a psychological roadblock to self-driving cars. AI Ethics 2021, 1, 151–155. [Google Scholar] [CrossRef]
- Jing, P.; Cai, Y.; Wang, B.; Wang, B.; Huang, J.; Jiang, C.; Yang, C. Listen to social media users: Mining Chinese public perception of automated vehicles after crashes. Transp. Res. Part Traffic Psychol. Behav. 2023, 93, 248–265. [Google Scholar] [CrossRef]
- Robinson, J.; Smyth, J.; Woodman, R.; Donzella, V. Ethical considerations and moral implications of autonomous vehicles and unavoidable collisions. Theor. Issues Ergon. Sci. 2022, 23, 435–452. [Google Scholar] [CrossRef]
- Etzioni, A. Incorporating Ethics into Artificial Intelligence (with Oren Etzioni). In Happiness is the Wrong Metric: A Liberal Communitarian Response to Populism; Springer International Publishing: Cham, Switzerland, 2018; pp. 235–252. [Google Scholar]
- Millar, J. An Ethics Evaluation Tool for Automating Ethical Decision-Making in Robots and Self-Driving Cars. Appl. Artif. Intell. 2016, 30, 787–809. [Google Scholar] [CrossRef]
- Batavia, P.; Pomerleau, D.; Thorpe, C. Applying Advanced Learning Algorithms to ALVINN; Technical Report CMU-RI-TR-96-31; Carnegie Mellon University: Pittsburgh, PA, USA, 1996. [Google Scholar]
- Mezgár, I.; Váncza, J. From ethics to standards—A path via responsible AI to cyber-physical production systems. Annu. Rev. Control. 2022, 53, 391–404. [Google Scholar] [CrossRef]
- Taebi, B.; van den Hoven, J.; Bird, S.J. The Importance of Ethics in Modern Universities of Technology. Sci. Eng. Ethics 2019, 25, 1471–5546. [Google Scholar] [CrossRef]
- Thornton, S.M.; Pan, S.; Erlien, S.M.; Gerdes, J.C. Incorporating Ethical Considerations Into Automated Vehicle Control. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1429–1439. [Google Scholar] [CrossRef]
- Shah, M.U.; Rehman, U.; Iqbal, F.; Hussain, M.; Wahid, F. An Alternate Account on the Ethical Implications of Autonomous Vehicles. In Proceedings of the 2021 17th International Conference on Intelligent Environments (IE), Dubai, United Arab Emirates, 21–24 June 2021; pp. 1–5. [Google Scholar]
- Coeckelbergh, M. Responsibility and the Moral Phenomenology of Using Self-Driving Cars. Appl. Artif. Intell. 2016, 30, 748–757. [Google Scholar] [CrossRef]
- Yokoi, R.; Nakayachi, K. Trust in Autonomous Cars: Exploring the Role of Shared Moral Values, Reasoning, and Emotion in Safety-Critical Decisions. Hum. Factors 2021, 63, 1465–1484. [Google Scholar] [CrossRef]
- Fossa, F. Ethics of Driving Automation. Artificial Agency and Human Values; Springer: Cham, Switzerland, 2023. [Google Scholar]
- Martinho, A.; Herber, N.; Kroesen, M.; Chorus, C. Ethical issues in focus by the autonomous vehicles industry. Transp. Rev. 2021, 41, 556–577. [Google Scholar] [CrossRef]
- Marakby, S. A Matter of Trust: Ford’s Approach to Developing Self-Driving Vehicles; Technical Report; Ford Autonomous Vehicles LLC: Detroit, MI, USA, 2018. [Google Scholar]
- Weast, J.; Yurdana, M.; Jordan, A. A Matter of Trust: How Smart Design Can Accelerate Automated Vehicle Adoption; Technical Report; Intel: Santa Clara, CA, USA, 2016. [Google Scholar]
- Eliot, L. Self-Driving Cars Could Spark A Religious Revival Among Young Americans. Forbes, 24 November 2019. Available online: www.forbes.com/sites/lanceeliot/2019/11/24/self-driving-cars-could-spark-a-religious-revival-among-young-americans (accessed on 1 January 2020).
- Janzen, W. Old Testament Ethics; Westminster John Knox Press: Louisville, KY, USA, 1994. [Google Scholar]
- Barton, J. Ethics in Ancient Israel; Oxford University Press: Oxford, UK, 2017. [Google Scholar]
- Longenecker, R.N. (Ed.) New Testament Social Ethics for Today; Wm. B. Eerdmans-Lightning Source: Grand Rapids, MI, USA, 1984. [Google Scholar]
- Houlden, J.L. Ethics and the New Testament; Bloomsbury Publishing: London, UK, 2004. [Google Scholar]
- Scott, C.A.A. New Testament Ethics: An Introduction; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Anderson, W.H.U. (Ed.) Technology and Theology; Vernon Press: Wilmington, DE, USA, 2021. [Google Scholar]
- Reed, R. A.I. in Religion, A.I. for Religion, A.I. and Religion: Towards a Theory of Religious Studies and Artificial Intelligence. Religions 2021, 12, 401. [Google Scholar] [CrossRef]
- Bonhoeffer, D. Ethics; Macmillan: New York, NY, USA, 1965. [Google Scholar]
- Boedy, M. From Deliberation to Responsibility: Ethics, Invention, and Bonhoeffer in Technical Communication. Tech. Commun. Q. 2017, 26, 116–126. [Google Scholar] [CrossRef]
- Verhaegen, M. Integrating Theological Ethics of Responsibility with Teleological and Deontological Ethics for Embodied AI. Master’s Thesis, Evangelische Theologische Faculteit, Leuven, Belgium, 2021. [Google Scholar]
- Spater, J.; Tranvik, I. The Protestant Ethic Reexamined: Calvinism and Industrialization. Comp. Polit. Stud. 2019, 52, 1963–1994. [Google Scholar] [CrossRef]
- Spenkuch, J.L. Religion and work: Micro evidence from contemporary Germany. J. Econ. Behav. Organ. 2017, 135, 193–214. [Google Scholar] [CrossRef]
- Németh, B. Route selection method with ethical considerations for automated vehicles under critical situations. In Proceedings of the 2022 IEEE 20th Jubilee World Symposium on Applied Machine Intelligence and Informatics (SAMI), Poprad, Slovakia, 19–22 January 2022; pp. 419–424. [Google Scholar]
- Németh, B. Consequences of an Analysis Using Biblical Analogies for Automated Vehicle Control Design. Stud. Univ.-Babes-Bolyai Theol. Reformata Transylvanica 2022, 67, 29–56. [Google Scholar] [CrossRef]
- Jenkins, R.; Cerny, D.; Hribek, T. (Eds.) Autonomous Vehicle Ethics. The Trolley Problem and Beyond; Oxford University Press: Oxford, UK, 2022. [Google Scholar]
- Holstein, T.; Dodig-Crnkovic, G.; Pelliccione, P. Real-world Ethics for Self-Driving Cars. In Proceedings of the 2020 IEEE/ACM 42nd International Conference on Software Engineering: Companion Proceedings (ICSE-Companion), Seoul, Republic of Korea, 5–11 October 2020; pp. 328–329. [Google Scholar]
- Hansson, S.; Belin, M.; Lundgren, B. Self-Driving Vehicles—An Ethical Overview. Philos. Technol. 2021, 34, 1383–1408. [Google Scholar] [CrossRef]
- Cunneen, M.; Mullins, M.; Murphy, F.; Shannon, D.; Furxhi, I.; Ryan, C. Autonomous Vehicles and Avoiding the Trolley (Dilemma): Vehicle Perception, Classification, and the Challenges of Framing Decision Ethics. Cybern. Syst. 2020, 51, 59–80. [Google Scholar] [CrossRef]
- Königs, P. Of trolleys and self-driving cars: What machine ethicists can and cannot learn from trolleyology. Utilitas 2023, 35, 70–87. [Google Scholar] [CrossRef]
- Sütfeld, L.; Gast, R.; König, P.; Pipa, G. Using Virtual Reality to Assess Ethical Decisions in Road Traffic Scenarios: Applicability of Value-of-Life-Based Models and Influences of Time Pressure. Front. Behav. Neurosci. 2017, 11, 122. [Google Scholar] [CrossRef]
- Benvegnu, G.; Pluchino, P.; Garnberini, L. Virtual Morality: Using Virtual Reality to Study Moral Behavior in Extreme Accident Situations. In Proceedings of the 2021 IEEE Virtual Reality and 3D User Interfaces (VR), Lisboa, Portugal, 27 March–1 April 2021; pp. 316–325. [Google Scholar]
- Etienne, H.; Cova, F. Performative Quantification: Design Choices Impact the Lessons of Empirical Surveys About the Ethics of Autonomous Vehicles. Soc. Sci. Comput. Rev. 2023; early access. [Google Scholar]
- Myklebust, T.; Stalhane, T.; Jenssen, G.D.; Waro, I. Autonomous Cars, Trust and Safety Case for the Public. In Proceedings of the 2020 Annual Reliability and Maintainability Symposium (RAMS), Palm Springs, CA, USA, 27–30 January 2020; pp. 1–6. [Google Scholar]
- Ng, Y.L. Understanding Passenger Acceptance of Autonomous Vehicles Through the Prism of the Trolley Dilemma. Int. J. -Hum.-Comput. Interact. 2023, 2023, 1–10. [Google Scholar] [CrossRef]
- Vlacic, L. Do We Really Wish Self-Driving Vehicles to Behave as Human Drivers? [Editor’s Column]. IEEE Intell. Transp. Syst. Mag. 2022, 14, 3–4. [Google Scholar] [CrossRef]
- Geisslinger, M.; Poszler, F.; Betz, J.; Luetge, C.; Lienkamp, M. Autonomous Driving Ethics: From Trolley Problem to Ethics of Risk. Philos. Technol. 2021, 34, 1033–1055. [Google Scholar] [CrossRef]
- Yeong, D.J.; Velasco-Hernandez, G.; Barry, J.; Walsh, J. Sensor and Sensor Fusion Technology in Autonomous Vehicles: A Review. Sensors 2021, 21, 2140. [Google Scholar] [CrossRef] [PubMed]
- Topic, J.; Skugor, B.; Deur, J.; Ivanovic, V.; Tseng, H.E. Neural Network-based Prediction of Pedestrian Crossing Behavior at Unsignalized Crosswalks. In Proceedings of the 2022 International Conference on Smart Systems and Technologies (SST), Osijek, Croatia, 19–21 October 2022; pp. 101–107. [Google Scholar]
- Bogenberger, F. AI-Enabled Mobility, 2021. Ethics and Legal Challenges of Automated Driving in Europe Workshop.
- McCall, B. The God of Chance and Purpose. Theol. Sci. 2019, 17, 133–142. [Google Scholar] [CrossRef]
- Bradley, J. Random Numbers and God’s Nature; Oxford University Press: Oxford, UK, 2016. [Google Scholar]
- Rafiee, A.; Wu, Y.; Sattar, A. Philosophical and Legal Approach to Moral Settings in Autonomous Vehicles: An Evaluation. In Social Licence and Ethical Practice; Breakey, H., Ed.; Research in Ethical Issues in Organizations; Emerald Publishing Limited: Bradford, UK, 2023. [Google Scholar]
- Wagner, M.; Koopman, P. A Philosophy for Developing Trust in Self-driving Cars. In Road Vehicle Automation 2; Springer: Berlin/Heidelberg, Germany, 2015; pp. 163–171. [Google Scholar]
- Goodall, N.J. Away from Trolley Problems and Toward Risk Management. Appl. Artif. Intell. 2016, 30, 810–821. [Google Scholar] [CrossRef]
- Gleadow, M. A Code of Ethics for Self-Driving Vehicles. Proc. Wellingt. Fac. Eng. Ethics Sustain. Symp. 2022, 2022, 1–7. [Google Scholar] [CrossRef]
- Mokrian, K.; Schuelke-Leech, B.A. Ethical decision-making responsibility in Canadian autonomous vehicle policies. In Proceedings of the 2021 IEEE International Symposium on Technology and Society (ISTAS), Waterloo, ON, Canada, 28–31 October 2021; pp. 1–7. [Google Scholar]
- Bonnefon, J.F.; Cerny, D.; Danaher, J.; Devillier, N.; Johansson, V.; Kovacikova, T.; Martens, M.; Mladenovic, M.; Palade, P.; Reed, N.; et al. Horizon 2020 Commission Expert Group to Advise on Specific Ethical Issues Raised by Driverless Mobility (E03659); Ethics of Connected and Automated Vehicles: Recommendations on Road Safety, Privacy, Fairness, Explainability and Responsibility; Technical Report; Publication Office of the European Union: Luxembourg, 2020.
- Luetge, C. The German Ethics Code for Automated and Connected Driving. Philos. Technol. 2017, 30, 547–558. [Google Scholar] [CrossRef]
- Hevelke, A.; Nida-Rümelin, J. Responsibility for Crashes of Autonomous Vehicles: An Ethical Analysis. Sci. Eng. Ethics 2015, 21, 619–630. [Google Scholar] [CrossRef]
- Krontiris, I.; Grammenou, K.; Terzidou, K.; Zacharopoulou, M.; Tsikintikou, M.; Baladima, F.; Sakellari, C.; Kaouras, K. Autonomous Vehicles: Data Protection and Ethical Considerations. In Proceedings of the 4th ACM Computer Science in Cars Symposium, CSCS’20, New York, NY, USA, 2 December 2020. [Google Scholar]
- Robinson, P.; Sun, L.; Furey, H.; Jenkins, R.; Phillips, C.R.M.; Powers, T.M.; Ritterson, R.S.; Xie, Y.; Casagrande, R.; Evans, N.G. Modelling Ethical Algorithms in Autonomous Vehicles Using Crash Data. IEEE Trans. Intell. Transp. Syst. 2022, 23, 7775–7784. [Google Scholar] [CrossRef]
- Doecke, S.D.; Baldock, M.R.; Kloeden, C.N.; Dutschke, J.K. Impact speed and the risk of serious injury in vehicle crashes. Accid. Anal. Prev. 2020, 144, 105629. [Google Scholar] [CrossRef]
- Haghighattalab, S.; Chen, A.; Fan, Y.; Mohammadi, R. Engineering ethics within accident analysis models. Accid. Anal. Prev. 2019, 129, 119–125. [Google Scholar] [CrossRef]
- Szénási, S. Analysis of historical road accident data supporting autonomous vehicle control strategies. PeerJ Comput. Sci. 2021, 7, e399. [Google Scholar] [CrossRef]
- Papadimitriou, E.; Farah, H.; van de Kaa, G.; Santoni de Sio, F.; Hagenzieker, M.; van Gelder, P. Towards common ethical and safe ’behaviour’ standards for automated vehicles. Accid. Anal. Prev. 2022, 174, 106724. [Google Scholar] [CrossRef] [PubMed]
- Millán-Blanquel, L.; Veres, S.M.; Purshouse, R.C. Ethical Considerations for a Decision Making System for Autonomous Vehicles During an Inevitable Collision. In Proceedings of the 2020 28th Mediterranean Conference on Control and Automation (MED), Saint-Raphaël, France, 15–18 September 2020; pp. 514–519. [Google Scholar]
- Bracanovic, T. No Ethics Settings for Autonomous Vehicles. Hung. Philos. Rev. 2019, 63, 47–60. [Google Scholar]
- Islam, M.A.; Rashid, S.I. Algorithm for Ethical Decision Making at Times of Accidents for Autonomous Vehicles. In Proceedings of the 2018 4th International Conference on Electrical Engineering and Information and Communication Technology (iCEEiCT), Dhaka, Bangladesh, 13–15 September 2018; pp. 438–442. [Google Scholar]
- Narayanan, A. Ethical judgement in intelligent control systems for autonomous vehicles. In Proceedings of the 2019 Australian and New Zealand Control Conference (ANZCC), Auckland, New Zealand, 27–29 November 2019; pp. 231–236. [Google Scholar]
- Wang, H.; Huang, Y.; Khajepour, A.; Cao, D.; Lv, C. Ethical Decision-Making Platform in Autonomous Vehicles With Lexicographic Optimization Based Model Predictive Controller. IEEE Trans. Veh. Technol. 2020, 69, 8164–8175. [Google Scholar] [CrossRef]
- Weber, M. The Protestant Ethic and the Spirit of Capitalism; Routledge: London, UK, 1905. [Google Scholar]
- Mauldin, J.T. Interpreting the Divine Mandates in a Bonhoeffer Moment. Polit. Theol. 2019, 20, 574–594. [Google Scholar] [CrossRef]
- De Graaff, G. Friends with a Mandate: Friendship and Family in Bonhoeffer’s Ecclesiology. Stud. Christ. Ethics 2017, 30, 389–406. [Google Scholar] [CrossRef]
- Tripp, D. The Biblical Mandate for Caring for Creation; Wipf and Stock: Eugene, OR, USA, 2013. [Google Scholar]
- Holleyman, T.D. The Orders of Vocation: A Brunnerian Proposal. Int. J. Syst. Theol. 2023, 25, 114–133. [Google Scholar] [CrossRef]
- Nimmo, P.T. The orders of creation in the theological ethics of Karl Barth. Scott. J. Theol. 2007, 60, 24–35. [Google Scholar] [CrossRef]
- Tafilowski, R. A Reappraisal of the Orders of Creation. Lutheran Q. 2017, 31, 288–309. [Google Scholar] [CrossRef]
- Gaspar, P.; Szabo, Z.; Bokor, J.; Nemeth, B. Robust Control Design for Active Driver Assistance Systems. A Linear-Parameter-Varying Approach; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- McFarland, I.A. 140 The Fall and Sin. In The Oxford Handbook of Systematic Theology; Oxford University Press: Oxford, UK, 2007. [Google Scholar]
- Bonevac, D. John Calvin’s Multiplicity Thesis. Religions 2021, 12, 399. [Google Scholar] [CrossRef]
- Tillich, P. Systematic Theology: Three Volumes in One; University of Chicago Press: Chicago, IL, USA, 1967. [Google Scholar]
- Marlow, H. Creation, humanity and hubris in the Hebrew Bible. Pract. Theol. 2022, 15, 491–503. [Google Scholar] [CrossRef]
- Krusche, M. The Descent to the Netherworld as a Result of Hubris in the Biblical Prophetic Literature. Vetus Testam. 2023, 1.aop, 1–14. [Google Scholar]
- Brown, C. (Ed.) The New International Dictionary of New Testament Theology; Zondervan Publishing House: Grand Rapids, MI, USA, 1979; Volume 3. [Google Scholar]
- Michel, O. Der Brief an die Römer (KEK 4); Vandenhoeck and Ruprecht: Göttingen, Germany, 1978. [Google Scholar]
- De Mingo Kaminouchi, A. An Introduction to Christian Ethics: A New Testament Perspective; Liturgical Press: Collegeville, MN, USA, 2020. [Google Scholar]
- Jaki, S.L. The Savior of Science; Eerdmans Pub Co.: Grand Rapids, MI, USA, 2000. [Google Scholar]
- Bissell, D.; Birtchnell, T.; Elliott, A.; Hsu, E.L. Autonomous automobilities: The social impacts of driverless vehicles. Curr. Sociol. 2020, 68, 116–134. [Google Scholar] [CrossRef]
- Houston, W.J. Contending for Justice. Ideologies and Theologies of Social Justice in the Old Testament; The Library of Hebrew Bible/Old Testament Studies; Bloomsbury Publishing: London, UK, 2009. [Google Scholar]
- Hays, R.B. The Moral Vision of the New Testament: Community, Cross, New Creation, A Contemporary Introduction to New Testament Ethics; HarperOne: San Francisco, CA, USA, 1996. [Google Scholar]
- Van der Watt, J.G. (Ed.) Identity, Ethics, and Ethos in the New Testament; De Gruyter: Berlin, Germany; Boston, MA, USA, 2006. [Google Scholar]
- Németh, B.; Hegedűs, T.; Gáspár, P. Model Predictive Control Design for Overtaking Maneuvers for Multi-Vehicle Scenarios. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 744–749. [Google Scholar]
- Malyuta, D.; Reynolds, T.P.; Szmuk, M.; Lew, T.; Bonalli, R.; Pavone, M.; Acikmese, B. Convex Optimization for Trajectory Generation: A Tutorial on Generating Dynamically Feasible Trajectories Reliably and Efficiently. IEEE Control. Syst. Mag. 2022, 42, 40–113. [Google Scholar] [CrossRef]
- Rajamani, R. Vehicle Dynamics and Control; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Tóth, R. Discretization of LPV Systems. In Modeling and Identification of Linear Parameter-Varying Systems; Lecture Notes in Control and Information Sciences; Springer: Berlin/Heidelberg, Germany, 2010; Volume 403. [Google Scholar]
- Karaman, S.; Frazzoli, E. Optimal kinodynamic motion planning using incremental sampling-based methods. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 7681–7687. [Google Scholar]
- Grossmann, I.E. Review of Nonlinear Mixed-Integer and Disjunctive Programming Techniques. Optim. Eng. 2002, 3, 227–252. [Google Scholar] [CrossRef]
- Hegedűs, T.; Németh, B.; Gáspár, P. Graph -based Multi-Vehicle Overtaking Strategy for Autonomous Vehicles. IFAC-PapersOnLine 2019, 52, 372–377. [Google Scholar] [CrossRef]
- Würsching, G.; Althoff, M. Sampling-Based Optimal Trajectory Generation for Autonomous Vehicles Using Reachable Sets. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 828–835. [Google Scholar]
- Morato, M.M.; Normey-Rico, J.E.; Sename, O. Model predictive control design for linear parameter varying systems: A survey. Annu. Rev. Control. 2020, 49, 64–80. [Google Scholar] [CrossRef]
- Fényes, D.; Németh, B.; Gáspár, P. Design of LPV control for autonomous vehicles using the contributions of big data analysis. Int. J. Control. 2022, 95, 1802–1813. [Google Scholar] [CrossRef]
- Bonnefon, J.F.; Shariff, A.; Rahwan, I. The Moral Psychology of AI and the Ethical Opt-Out Problem. In Ethics of Artificial Intelligence; Oxford University Press: Oxford, UK, 2020. [Google Scholar]
- Angwin, J.; Larson, J.; Mattu, S.; Kirchner, L. Machine Bias. In Ethics of Data and Analytics; Auerbach Publications: Boca Raton, FL, USA, 2022. [Google Scholar]
- Kudarauskas, N. Analysis of emergency braking of a vehicle. Transport 2007, 22, 154–159. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Németh, B. Coordinated Control Design for Ethical Maneuvering of Autonomous Vehicles. Energies 2023, 16, 4254. https://doi.org/10.3390/en16104254
Németh B. Coordinated Control Design for Ethical Maneuvering of Autonomous Vehicles. Energies. 2023; 16(10):4254. https://doi.org/10.3390/en16104254
Chicago/Turabian StyleNémeth, Balázs. 2023. "Coordinated Control Design for Ethical Maneuvering of Autonomous Vehicles" Energies 16, no. 10: 4254. https://doi.org/10.3390/en16104254
APA StyleNémeth, B. (2023). Coordinated Control Design for Ethical Maneuvering of Autonomous Vehicles. Energies, 16(10), 4254. https://doi.org/10.3390/en16104254