

Intelligent Identification Method of Shearer Drums Based on Improved YOLOv5s with Dark Channel-Guided Filtering Defogging

Abstract
1. Introduction
2. The Defogging Method for Dark Channel Guided Filtering in Fully Mechanized Mining Face
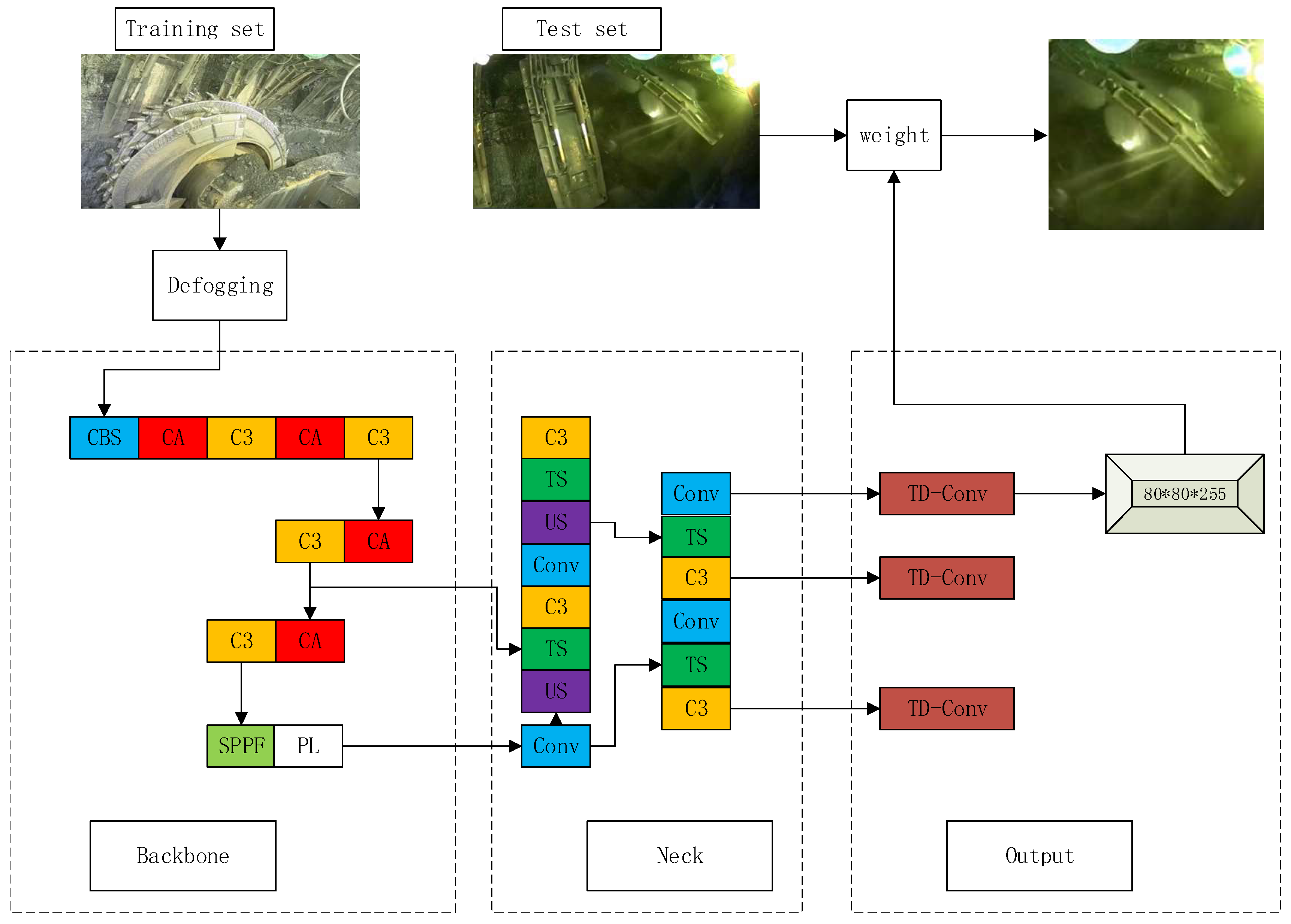
3. The Improved YOLOv5s Algorithm
3.1. CA Mechanism-Based Approach to Shearer Drum Recognition Accuracy Enhancement
3.2. Accelerated Inference of SIOU for Shearer Drum Target Detection Algorithm
4. Experiments and Results Analysis
4.1. Setup of Data Set and Experimental Platform
4.2. Evaluation Indicators
4.3. Experimental Validation
5. Discussion
6. Conclusions
- In terms of fog interference in underground coal mines, a dark channel-guided filtering defogging algorithm is proposed. The results show that the dark channel-guided filtering defogging algorithm can reduce the impact of fog and improve the accuracy of the detection algorithm.
- In terms of the lack of location information extraction for the YOLOv5s target detection algorithm, an improved backbone network based on the coordinated attention mechanism is proposed. The results showed that the mAP of YOLOv5s increased by 5.1% from 72% to 77.1%.
- In terms of the network convergence speed is slow due to the large freedom of loss function regression for YOLOv5s, the SIoU is taken as the loss function of the YOLOv5s algorithm. The experimental result presents that the accuracy and speed of the YOLOv5s detection are improved overall.
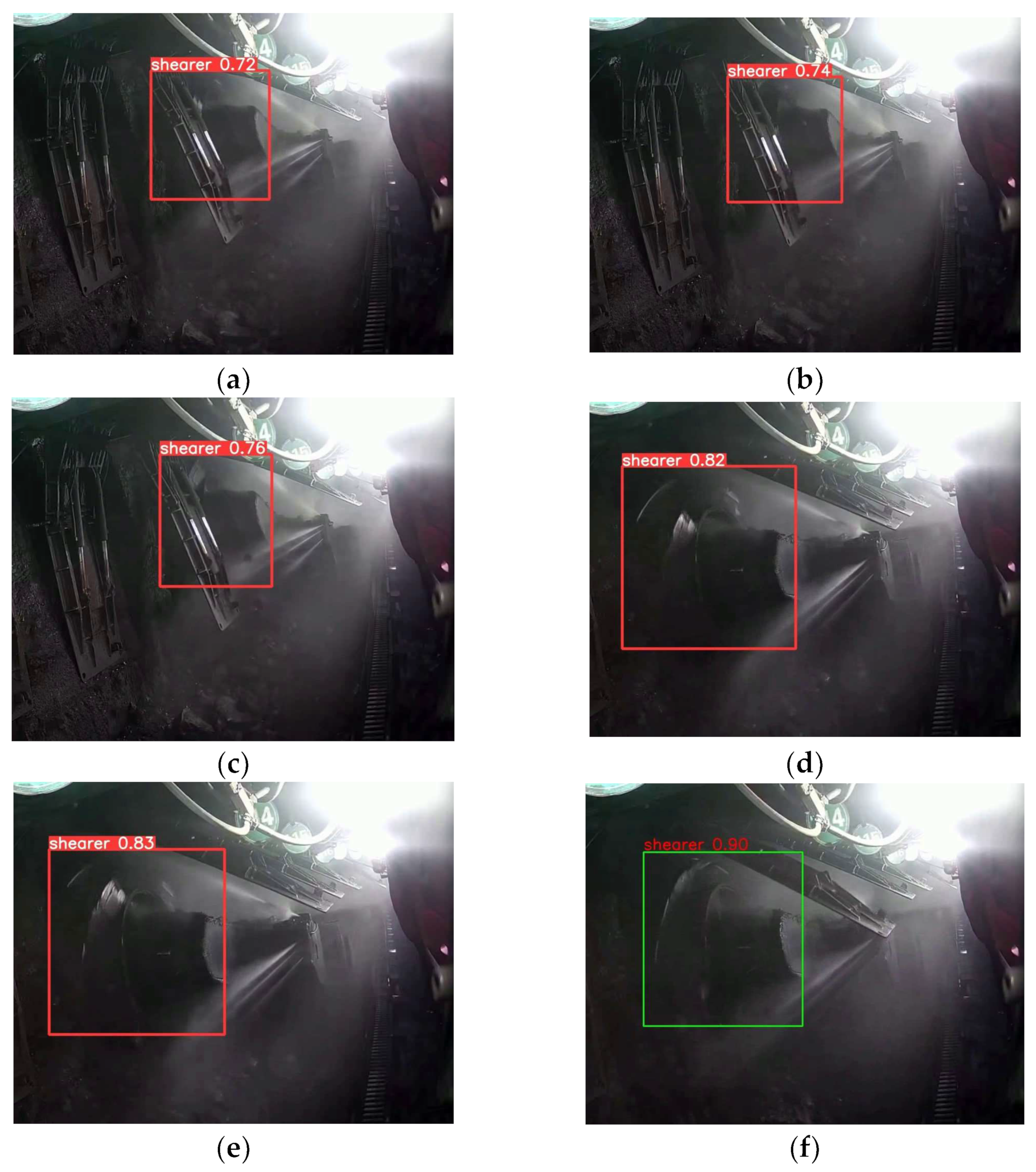
- This method was deployed in Huangling II mine to identify the shear drums. The results present an average identification accuracy is 89.3%, and a recognition speed is 48.8 frame/s in an unobstructed scenario. The average identification accuracy is 81.2%, and the recognition speed is 40 frame/s in the sheltered scenario. The proposed method can meet the identification requirements in a fully mechanized mining face.
- At present we have mainly studied shearer drum identification. An anti-collision warning method for shearer drum and hydraulic support guard plates is a future research direction.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Colores, S.S.; Moya-Sánchez, E.U.; Ramos-Arreguín, J.-M.; Cabal-Yépez, E. Statistical multidirectional line dark channel for single-image dehazing. IET Image Process. 2019, 13, 2877–2887. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, C.; Liu, L.; Chen, G.; Yue, H. Visibility restoration of single image captured in dust and haze weather conditions. Multidimens. Syst. Signal Process. 2020, 31, 619–633. [Google Scholar] [CrossRef]
- Zhang, W.; Lu, J.; Xu, X.; Hou, X. Estimation of atmospheric light based on gaussian distribution. Multimed. Tools Appl. 2019, 78, 33401–33414. [Google Scholar] [CrossRef]
- He, K.; Sun, J.; Tang, X. Single image haze removal using dark channel prior. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 33, 2341–2353. [Google Scholar] [PubMed]
- Ehsan, S.M.; Imran, M.; Ullah, A.; Elbasi, E. A Single Image Dehazing Technique Using the Dual Transmission Maps Strategy and Gradient-Domain Guided Image Filtering. IEEE Access 2021, 9, 89055–89063. [Google Scholar] [CrossRef]
- Salazar-Colores, S.; Ramos-Arreguín, J.M.; Ortiz Echeverri, C.J.; Cabal-Yepez, E.; Pedraza-Ortega, J.C.; Rodriguez-Resendiz, J. Image dehazing using morphological opening, dilation and Gaussian filtering. Signal Image Video Process. 2018, 12, 1329–1335. [Google Scholar] [CrossRef]
- Zhang, W.; Dong, L.; Pan, X.; Zhou, J.; Qin, L.; Xu, W. Single image defogging based on multi-channel convolutional MSRCR. IEEE Access 2019, 7, 72492–72504. [Google Scholar] [CrossRef]
- Mao, Q.; Wang, Y.; Zhang, X.; Zhao, X.; Zhang, G.; Mushayi, K. Clarity method of fog and dust image in fully mechanized mining face. Mach. Vis. Appl. 2022, 33, 30. [Google Scholar] [CrossRef]
- Mao, Q.; Li, S.; Hu, X.; Xue, X. Coal Mine Belt Conveyor Foreign Objects Recognition Method of Improved YOLOv5 Algorithm with Defogging and Deblurring. Energies 2022, 15, 9504. [Google Scholar] [CrossRef]
- Zhang, K. Research on Hydraulic Bracket Attitude Monitoring Method Based on Information Fusion Technology. Bachelor’s Thesis, Taiyuan University of Technology, Taiyuan, China, 2018. [Google Scholar]
- Zhang, K.; Lian, Z. Hydraulic bracket attitude angle measurement system. Ind. Mine Autom. 2017, 43, 40–45. [Google Scholar]
- Wang, M.Y.; Zhang, X.H.; Ma, H.W.; Du, Y.Y.; Zhang, Y.M.; Xie, N.; Wei, Q.N. Remote control collision detection and early warning method for comprehensive mining equipment. Coal Sci. Technol. 2021, 49, 110–116. [Google Scholar]
- Zhang, J.; Ding, J.K.; Li, R.; Wang, H.; Wang, X. Research on 5G-based attitude detection technology of overhead hydraulic bracket. Coal Min. Mach. 2022, 43, 39–41. [Google Scholar]
- Ren, H.W.; Li, S.S.; Zhao, G.R.; Fu, K.K. Measurement method of support height and roof beam posture angles for working face hydraulic support based on depth vision. J. Min. Saf. Eng. 2022, 39, 72–81+93. [Google Scholar]
- Zhang, X.; Wang, D.; Yang, W. Vision-based measurement of hydraulic bracket position detection method. Ind. Min. Autom. 2019, 45, 56–60. [Google Scholar]
- Wang, Y.; Li, H.; Guo, W.; He, H.; Jia, G. An image recognition-based method for monitoring the retraction status of hydraulic support face guard. Ind. Min. Autom. 2019, 45, 47–53. [Google Scholar]
- Mang, Y. Research on Monitoring Technology of Interference between Hydraulic Support Face Guard and Coal Mining Machine Shearer Cut-Off. Bachelor’s Thesis, China University of Mining and Technology (Beijing), Beijing, China, 2019. [Google Scholar]
- Li, J.; Liang, X.; Shen, S.; Xu, T.; Feng, J.; Yan, S. Scale-aware fast R-CNN for pedestrian detection. IEEE T-Ransactions Multimed. 2017, 20, 985–996. [Google Scholar] [CrossRef]
- Li, Y.; He, K.; Sun, J. R-FCN: Object detection via region-based fully convolutional networks. Adv. Neural Inf. Process. Syst. 2016, 29, 379–387. [Google Scholar]
- LeCun, Y.; Boser, B.; Denker, J.S.; Henderson, D.; Howard, R.E.; Hubbard, W.; Jackel, L.D. Backpropagation Applied to Handwritten Zip Code Recognition. Neural Comput. 2014, 1, 541–551. [Google Scholar] [CrossRef]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD:Single Shot MultiBox Detector. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image | Entropy | Brenner |
|---|---|---|
| Original image | 4.113 | 1.061 |
| proposed | 4.126 | 1.087 |
| He | 4.125 | 1.085 |
| Berman | 4.117 | 1.086 |
| Configuration | Parameters |
|---|---|
| Operating systems | Windows10 |
| GPU | NVIDIA GeForce RTX 3080 |
| CPU | Intel(R) Core(TM)i7-12700K |
| Deep learning frameworks | Pytorch |
| Defogging | CA | SIoU | mAP/% | Frame Rate/(Frame/s−1) |
|---|---|---|---|---|
| 72 | 45 | |||
| √ | 74 | 41 | ||
| √ | 76.1 | 44 | ||
| √ | 80 | 52 | ||
| √ | √ | 82 | 43 | |
| √ | √ | 83 | 48 | |
| √ | √ | 79.1 | 47 | |
| √ | √ | √ | 90.3 | 48.8 |
| Model | Frame Rate/(Frame/s−1) | mAP/% | |
|---|---|---|---|
| ONE STAGE | YOLO | 45 | 63.4 |
| YOLOv2 | 40 | 70.6 | |
| YOLOv5 | 45 | 72 | |
| SSD300 | 46 | 77.3 | |
| SSD321 | 15 | 77.1 | |
| OURS | 48.8 | 90.3 | |
| TWO STAGE | Fast R-CNN | 0.50 | 76 |
| Faster R-CNN | 7 | 85.1 | |
| Faster R-CNN | 2.45 | 81.6 | |
| MR-CNN | 0.02 | 78.2 | |
| ION | 1.36 | 76.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, Q.; Wang, M.; Hu, X.; Xue, X.; Zhai, J. Intelligent Identification Method of Shearer Drums Based on Improved YOLOv5s with Dark Channel-Guided Filtering Defogging. Energies 2023, 16, 4190. https://doi.org/10.3390/en16104190
Mao Q, Wang M, Hu X, Xue X, Zhai J. Intelligent Identification Method of Shearer Drums Based on Improved YOLOv5s with Dark Channel-Guided Filtering Defogging. Energies. 2023; 16(10):4190. https://doi.org/10.3390/en16104190
Chicago/Turabian StyleMao, Qinghua, Menghan Wang, Xin Hu, Xusheng Xue, and Jiao Zhai. 2023. "Intelligent Identification Method of Shearer Drums Based on Improved YOLOv5s with Dark Channel-Guided Filtering Defogging" Energies 16, no. 10: 4190. https://doi.org/10.3390/en16104190
APA StyleMao, Q., Wang, M., Hu, X., Xue, X., & Zhai, J. (2023). Intelligent Identification Method of Shearer Drums Based on Improved YOLOv5s with Dark Channel-Guided Filtering Defogging. Energies, 16(10), 4190. https://doi.org/10.3390/en16104190