
An Enhanced Path Planner for Electric Vehicles Considering User-Defined Time Windows and Preferences

 , ,
, ,
Abstract
1. Introduction
- We incorporate time windows for activities during the trip that are defined by the user, such as taking lunch breaks, visiting POIs, or spending the night at a hotel.
- We account for user preferences by using weights for different POI categories.
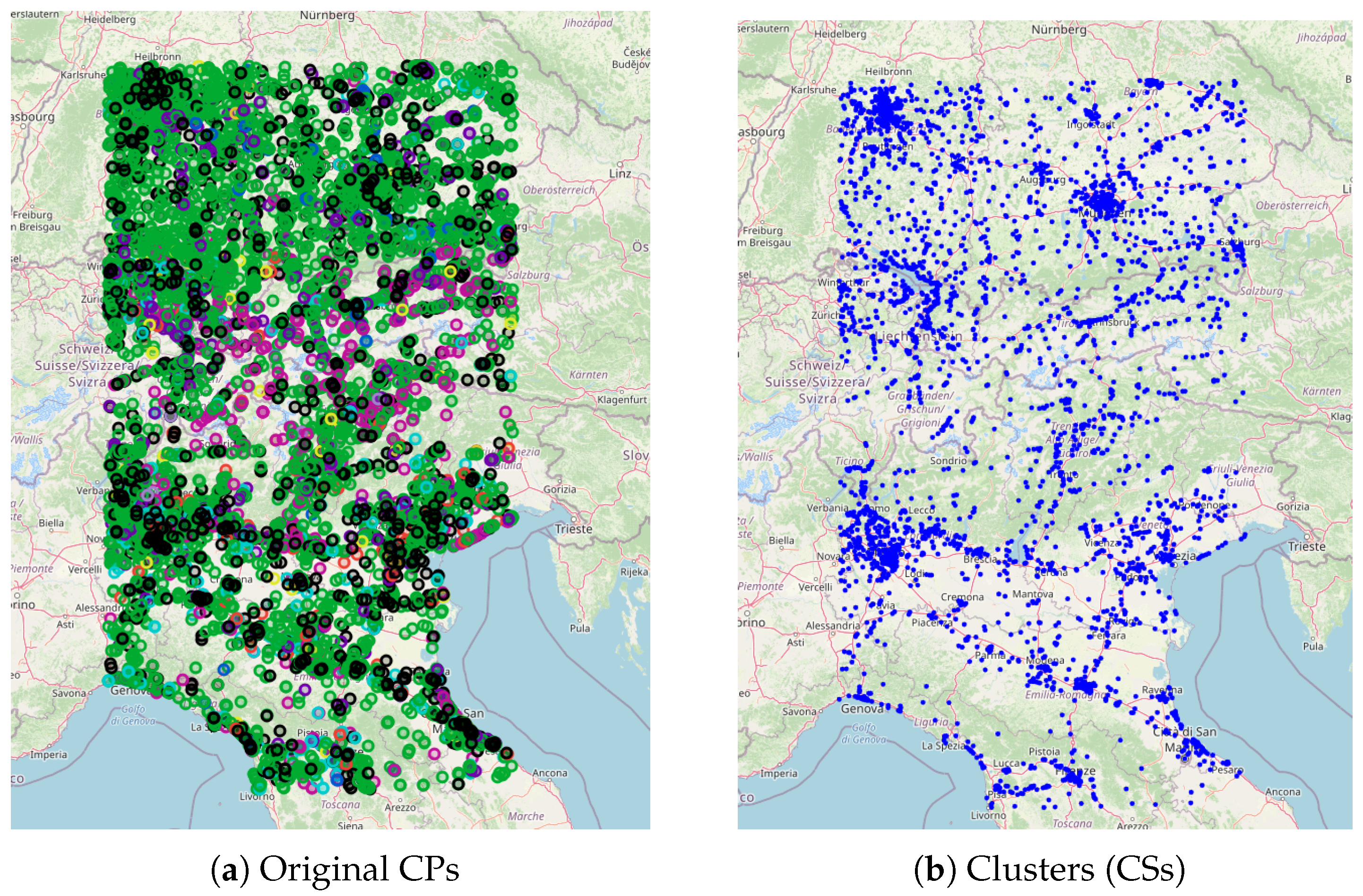
- We consider CSs based on clusters of CPs with sufficient proximity, thus allowing the user flexibility in the choice of a CP upon arrival.
- We ensure resilient paths that have a minimum number of CSs within a threshold distance
- We propose an efficient heuristic algorithm to solve the resulting EVSPPWP.
- We demonstrate our methodology on a series of real usage examples.
2. Related Work
3. The Electric Vehicle Shortest Path Problem with Time Windows and User Preferences
A Mixed-Integer Linear Programming Formulation
4. Solution Method
4.1. Graph Generation
4.1.1. Clustering
4.1.2. Modified Arc Weights
4.1.3. Resilience Value
4.1.4. User Input Parameters
4.1.5. Graph Reduction
4.2. Two-Step Algorithm
4.2.1. Algorithm
4.2.2. FRVCP
5. Case Study
5.1. Graph Generation
5.2. User Input
5.3. Origin–Destination Examples
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| EV | Electric Vehicle |
| CP | Charging Point |
| CS | Charging Station |
| POI | Point of Interest |
| SoC | State of Charge |
| kWh | Kilowatt-hour |
| EVSPP | Electric Vehicle Shortest Path Problem |
| EVSPPWP | Electric Vehicle Shortest Path Problem with time windows and user preferences |
| MILP | Mixed Integer Linear Programming |
| EVRP | Electric Vehicle Routing Problem |
| FRVCP | Fixed Route Vehicle Charging Problem |
| TTDP | Tourist Trip Design Problem |
| EVRTP | Electric Vehicle Routing Tour Planning |
| NIRNI | Northern Italy and Regions North of Italy |
| Set of charging stations | |
| Origin node | |
| Destination node | |
| Set of nodes containing the origin , destination , and the set | |
| Start time at | |
| Initial SoC | |
| Final SoC | |
| Minimal energy at arrival | |
| Time spent charging at a CS | |
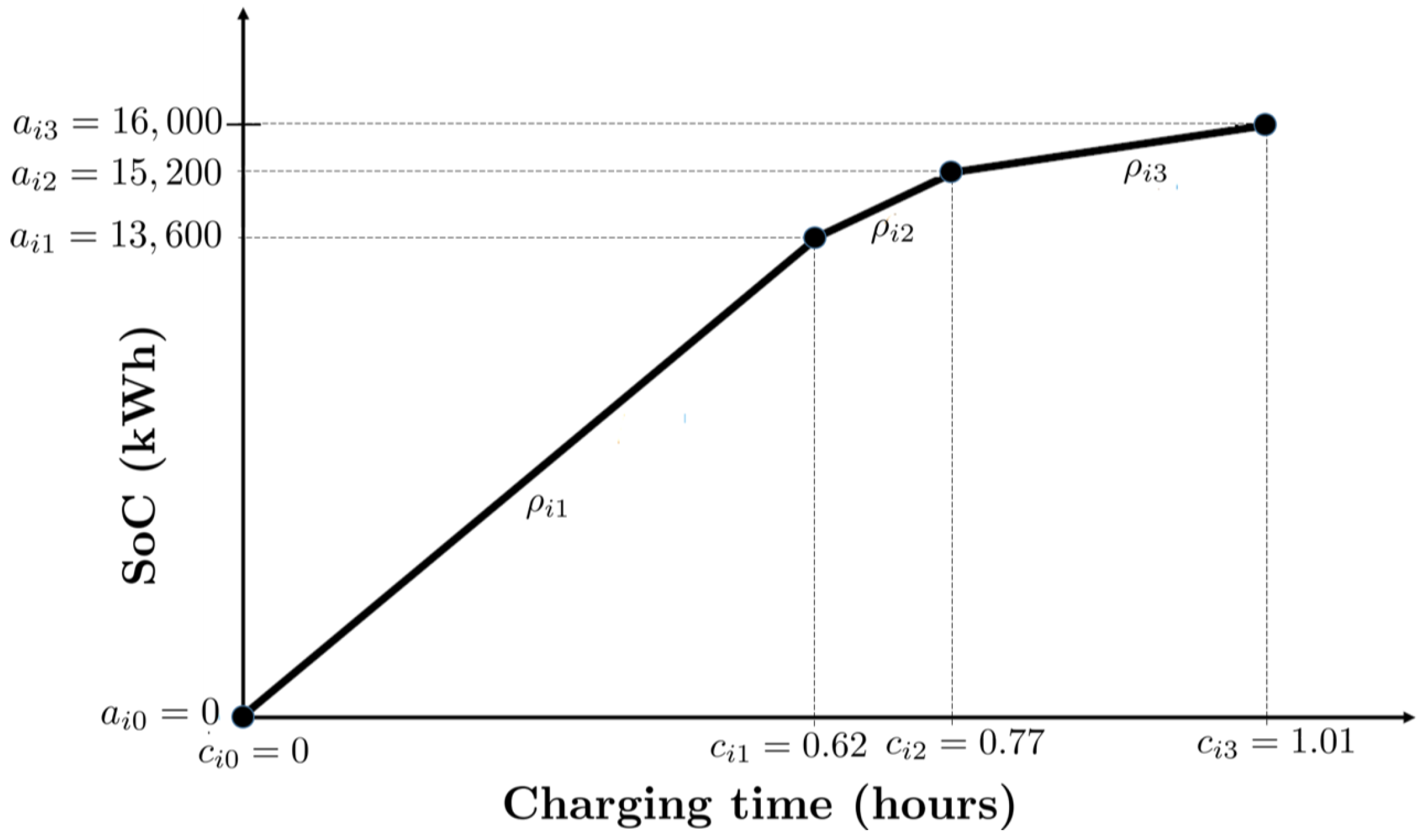
| Piece-wise linear concave charging function of charging station i | |
| Graph | |
| Set of arcs in the graph | |
| Driving time between nodes i and j | |
| Distance between nodes i and j | |
| Energy consumption between nodes i and j | |
| EV average consumption | |
| Q | Battery capacity |
| Ordered set of breakpoints of the charging curve of CS i | |
| Charging time of breakpoint | |
| SoC of breakpoint | |
| Slope of the linear function that connects breakpoints and | |
| Importance value of for POI category | |
| Maximum distance between arcs | |
| Weight on the total importance value of the POIs with respect to travel time | |
| Set of POI categories | |
| Time spent charging at CS j | |
| Set of ordered time windows that require a specific POI category | |
| Minimum start time of time window w | |
| Maximum start time of time window w | |
| Minimum time that the EV needs to stop for time window w | |
| Set of CSs with POIs in their neighborhood that match the POI specified for | |
| Modified weight of the arc between nodes i and j | |
| SoC when the EV arrives at i | |
| SoC when the EV departs from i | |
| Start time for charging an EV at i | |
| End time for charging an EV at i | |
| Coefficients associated with the breakpoint when the EV enters i | |
| Coefficients associated with the breakpoint when the EV leaves i | |
| Binary variable equal to 1 when the SoC is in , when the EV enters i | |
| Binary variable equal to 1 when the SoC is in , when the EV leaves i | |
| Time when the EV arrives at i | |
| Time when the EV departs from i | |
| Binary variable equal to 1 if the EV uses arc | |
| Binary variable equal to 1 if the EV stops in j in time window w | |
| Distance threshold for considering POIs around a CS | |
| Resilience value of the arc between nodes i and j | |
| Critical distance for ensuring availability of CSs | |
| Length of a section in which the resilience value is computed | |
| Number of CSs within a distance of from section k | |
| Threshold distance around the non EV-paths | |
| Reduced graph | |
| Filtered set of nodes | |
| Set of considered arcs between | |
| Ordered set of nodes selected by the algorithm to perform time windows in |
References
- EEA. Average Carbon Dioxide Emissions from New Cars Registered in EUROPE Decreased by 12% in 2020. 2022. Available online: https://www.eea.europa.eu/highlights/average-carbon-dioxide-emissions-from (accessed on 13 April 2023).
- Martins, L.d.C.; Tordecilla, R.D.; Castaneda, J.; Juan, A.A.; Faulin, J. Electric vehicle routing, arc routing, and team orienteering problems in sustainable transportation. Energies 2021, 14, 5131. [Google Scholar] [CrossRef]
- Kucukoglu, I.; Dewil, R.; Cattrysse, D. The electric vehicle routing problem and its variations: A literature review. Comput. Ind. Eng. 2021, 161, 107650. [Google Scholar] [CrossRef]
- Froger, A.; Jabali, O.; Mendoza, J.E.; Laporte, G. The electric vehicle routing problem with capacitated charging stations. Transp. Sci. 2022, 56, 460–482. [Google Scholar] [CrossRef]
- Sánchez, D.G.; Tabares, A.; Faria, L.T.; Rivera, J.C.; Franco, J.F. A Clustering Approach for the Optimal Siting of Recharging Stations in the Electric Vehicle Routing Problem with Time Windows. Energies 2022, 15, 2372. [Google Scholar] [CrossRef]
- Kullman, N.D.; Froger, A.; Mendoza, J.E.; Goodson, J.C. frvcpy: An open-source solver for the fixed route vehicle charging problem. INFORMS J. Comput. 2021, 33, 1277–1283. [Google Scholar] [CrossRef]
- A Better Route Planner. 2023. Available online: https://abetterrouteplanner.com (accessed on 15 March 2023).
- ZapMapEV. 2023. Available online: https://www.zap-map.com (accessed on 15 March 2023).
- PlugShare. 2023. Available online: https://www.plugshare.com (accessed on 15 March 2023).
- Schiffer, M.; Schneider, M.; Walther, G.; Laporte, G. Vehicle routing and location routing with intermediate stops: A review. Transp. Sci. 2019, 53, 319–343. [Google Scholar] [CrossRef]
- Erdoğan, S.; Miller-Hooks, E. A green vehicle routing problem. Transp. Res. Part E Logist. Transp. Rev. 2012, 48, 100–114. [Google Scholar] [CrossRef]
- Schneider, M.; Stenger, A.; Goeke, D. The electric vehicle-routing problem with time windows and recharging stations. Transp. Sci. 2014, 48, 500–520. [Google Scholar] [CrossRef]
- Felipe, Á.; Ortuño, M.T.; Righini, G.; Tirado, G. A heuristic approach for the green vehicle routing problem with multiple technologies and partial recharges. Transp. Res. Part E Logist. Transp. Rev. 2014, 71, 111–128. [Google Scholar] [CrossRef]
- Hiermann, G.; Hartl, R.F.; Puchinger, J.; Vidal, T. Routing a mix of conventional, plug-in hybrid, and electric vehicles. Eur. J. Oper. Res. 2019, 272, 235–248. [Google Scholar] [CrossRef]
- Goeke, D.; Schneider, M. Routing a mixed fleet of electric and conventional vehicles. Eur. J. Oper. Res. 2015, 245, 81–99. [Google Scholar] [CrossRef]
- Keskin, M.; Çatay, B. Partial recharge strategies for the electric vehicle routing problem with time windows. Transp. Res. Part C Emerg. Technol. 2016, 65, 111–127. [Google Scholar] [CrossRef]
- Montoya, A.; Guéret, C.; Mendoza, J.E.; Villegas, J.G. The electric vehicle routing problem with nonlinear charging function. Transp. Res. Part B Methodol. 2017, 103, 87–110. [Google Scholar] [CrossRef]
- Pelletier, S.; Jabali, O.; Laporte, G. The electric vehicle routing problem with energy consumption uncertainty. Transp. Res. Part B Methodol. 2019, 126, 225–255. [Google Scholar] [CrossRef]
- Montoya, A.; Guéret, C.; Mendoza, J.E.; Villegas, J.G. A multi-space sampling heuristic for the green vehicle routing problem. Transp. Res. Part C Emerg. Technol. 2016, 70, 113–128. [Google Scholar] [CrossRef]
- Andelmin, J.; Bartolini, E. An exact algorithm for the green vehicle routing problem. Transp. Sci. 2017, 51, 1288–1303. [Google Scholar] [CrossRef]
- Froger, A.; Mendoza, J.E.; Jabali, O.; Laporte, G. Improved formulations and algorithmic components for the electric vehicle routing problem with nonlinear charging functions. Comput. Oper. Res. 2019, 104, 256–294. [Google Scholar] [CrossRef]
- Desaulniers, G.; Errico, F.; Irnich, S.; Schneider, M. Exact algorithms for electric vehicle-routing problems with time windows. Oper. Res. 2016, 64, 1388–1405. [Google Scholar] [CrossRef]
- OpenEV. GitHub-Chargeprice/Open-ev-Data. 2022. Available online: https://github.com/chargeprice/open-ev-data (accessed on 15 March 2023).
- Zündorf, T. Electric Vehicle Routing with Realistic Recharging Models. Master’s Thesis, Karlsruhe Institute of Technology, Karlsruhe, Germany, 2014, unpublished. [Google Scholar]
- Sweda, T.M.; Dolinskaya, I.S.; Klabjan, D. Adaptive routing and recharging policies for electric vehicles. Transp. Sci. 2017, 51, 1326–1348. [Google Scholar] [CrossRef]
- Baum, M.; Dibbelt, J.; Gemsa, A.; Wagner, D.; Zündorf, T. Shortest feasible paths with charging stops for battery electric vehicles. Transp. Sci. 2019, 53, 1627–1655. [Google Scholar] [CrossRef]
- Baum, M.; Dibbelt, J.; Pajor, T.; Sauer, J.; Wagner, D.; Zündorf, T. Energy-optimal routes for battery electric vehicles. Algorithmica 2020, 82, 1490–1546. [Google Scholar] [CrossRef]
- Aljohani, T.M.; Mohammed, O. A Real-Time Energy Consumption Minimization Framework for Electric Vehicles Routing Optimization Based on SARSA Reinforcement Learning. Vehicles 2022, 4, 1176–1194. [Google Scholar] [CrossRef]
- Aljohani, T.M.; Ebrahim, A.; Mohammed, O. Real-Time metadata-driven routing optimization for electric vehicle energy consumption minimization using deep reinforcement learning and Markov chain model. Electr. Power Syst. Res. 2021, 192, 106962. [Google Scholar] [CrossRef]
- Roberti, R.; Wen, M. The electric traveling salesman problem with time windows. Transp. Res. Part E Logist. Transp. Rev. 2016, 89, 32–52. [Google Scholar] [CrossRef]
- Ruiz-Meza, J.; Montoya-Torres, J.R. A systematic literature review for the tourist trip design problem: Extensions, solution techniques and future research lines. Oper. Res. Perspect. 2022, 9, 100228. [Google Scholar] [CrossRef]
- Gavalas, D.; Konstantopoulos, C.; Mastakas, K.; Pantziou, G. A survey on algorithmic approaches for solving tourist trip design problems. J. Heuristics 2014, 20, 291–328. [Google Scholar] [CrossRef]
- Wang, Y.W.; Lin, C.C.; Lee, T.J. Electric vehicle tour planning. Transp. Res. Part D Transp. Environ. 2018, 63, 121–136. [Google Scholar] [CrossRef]
- Karbowska-Chilinska, J.; Chociej, K. Genetic algorithm for generation multistage tourist route of electrical vehicle. In Proceedings of the International Conference on Computer Information Systems and Industrial Management, Bialystok, Poland, 16–18 October 2020; Springer: Berlin, Germany, 2020; pp. 366–376. [Google Scholar]
- Cortés-Murcia, D.L.; Afsar, H.M.; Prodhon, C. Multi-period profitable tour problem with electric vehicles and mandatory stops. Int. J. Sustain. Transp. 2022, 17, 473–489. [Google Scholar] [CrossRef]
- Cassia, A.; Jabali, O.; Malucelli, F.; Pascoal, M. The electric vehicle shortest path problem with time windows and prize collection. In Proceedings of the 2022 17th Conference on Computer Science and Intelligence Systems (FedCSIS), Sofia, Bulgaria, 4–7 September 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 313–322. [Google Scholar]
- Mapbox. Mapbox Optimization Tool. 2023. Available online: https://www.mapbox.com (accessed on 15 March 2023).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Origin | Destination | Preference | Start Time | End Time | Duration | Distance (km) | Charging Stops |
|---|---|---|---|---|---|---|---|
| Venice | Milan | - | 10:00 | 15:17 | 05 h 17 min | 268.58 | 1 |
| 100% weight for shopping | 10:00 | 13:36 | 03 h 36 min | 269.87 | 1 | ||
| Lunch | 10:00 | 15:16 | 05 h 16 min | 274.32 | 2 | ||
| Night | 20:00 | 10:31 | 14 h 31 min | 268.58 | 1 | ||
| Trento | Stuttgart | - | 10:00 | 17:24 | 7 h 24 min | 499.84 | 3 |
| 100% weight for shopping | 10:00 | 18:15 | 08 h 15 min | 506.25 | 3 | ||
| Lunch | 10:00 | 18:16 | 08 h 16 min | 500.40 | 3 | ||
| Night | 20:00 | 13:10 | 17 h 10 min | 500.40 | 3 | ||
| Florence | Munich | - | 10:00 | 21:54 | 11 h 54 min | 649.15 | 4 |
| 100% weight for shopping | 10:00 | 22:51 | 12 h 51 min | 651.75 | 4 | ||
| Lunch | 10:00 | 21:56 | 11 h 56 min | 639.94 | 4 | ||
| Night | 10:00 | 10:09 | 24 h 09 min | 649.15 | 4 |
| Preference | Stop | Address | Start Time | Duration | SoC Start (%) | SoC End (%) |
|---|---|---|---|---|---|---|
| - | 1 | Via Isonzo 16, 40033, IT | 11:14 | 01 h 43 min | 36.4 | 100.0 |
| 2 | Via Dante 14, 38063, IT | 14:48 | 01 h 50 min | 23.1 | 76.5 | |
| 3 | Schindergries Parking, 39043, IT | 18:05 | 00 h 25 min | 20.0 | 75.0 | |
| 4 | Roßhütte 419, 6100, AT | 19:54 | 00 h 19 min | 27.8 | 71.5 | |
| 100% weight for shopping | 1 | Via Isonzo 16, 40033, IT | 11:59 | 01 h 36 min | 36.4 | 100.0 |
| 2 | Via Dante 14, 38063, IT | 15:33 | 01 h 50 min | 23.1 | 76.5 | |
| 3 | Schindergries Parking, 39043, IT | 18:50 | 01 h 02 min | 20.0 | 100.0 | |
| 4 | Marienpl. 17, 82467, DE | 21:49 | 00 h 39 min | 39.0 | 58.0 | |
| Lunc h | 1 | Via Isonzo 16, 40033, IT | 11:14 | 00 h 43 min | 36.4 | 63.4 |
| 2 | Via del Commercio 33, 46030, IT | 13:03 | 02 h 54 min | 20.0 | 94.8 | |
| 3 | Via Lancia - Lanciastraße 14, 39100, IT | 17:42 | 00 h 30 min | 20.0 | 79.0 | |
| 4 | Roßhütte 419, 6100, AT | 19:53 | 00 h 23 min | 20.0 | 71.5 | |
| Night | 1 | Via Isonzo 16, 40033, IT | 11:14 | 01 h 43 min | 36.4 | 100.0 |
| 2 | Via Dante 14, 38063, IT | 14:48 | 01 h 50 min | 23.1 | 76.5 | |
| 3 | Schindergries Parking, 39043, IT | 18:05 | 00 h 21 min | 20.0 | 67.2 | |
| 4 | Roßhütte 419, 6100, AT | 19:51 | 12 h 38 min | 20.0 | 100.0 |
| EV Model | SoC at Start (%) | |||||
|---|---|---|---|---|---|---|
| 60 | 70 | 80 | 90 | 100 | ||
| Tesla Roadster 2022 | Duration | 09 h 45 min | 08 h 51 min | 07 h 53 min | 07 h 05 min | 07 h 05 min |
| Distance | 654.94 | 652.11 | 652.11 | 648.42 | 648.42 | |
| Stops | 1 | 1 | 1 | 0 | 0 | |
| Tesla Model Y Long Range 2020 | Duration | 12 h 05 min | 11 h 20 min | 10 h 40 min | 10 h 06 min | 9 h 24 min |
| Distance | 659.21 | 655.19 | 655.19 | 658.57 | 652.04 | |
| Stops | 2 | 2 | 2 | 2 | 1 | |
| BMW - i3S - 120 A h 2020 | Duration | 11 h 16 min | 12 h 10 min | 11 h 54 min | 12 h 10 min | 11 h 33 min |
| Distance | 643.4 | 649.15 | 649.15 | 638.2 | 639.6 | |
| Stops | 4 | 4 | 4 | 3 | 3 | |
| Kia EV6 2WD 2021 | Duration | 12 h 12 min | 15 h 05 min | 14 h 33 min | 12 h 15 min | 12 h 21 min |
| Distance | 662.49 | 662.63 | 662.62 | 663.13 | 658.61 | |
| Stops | 3 | 2 | 2 | 2 | 2 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cubillos, M.; Dell’Amico, M.; Jabali, O.; Malucelli, F.; Tresoldi, E. An Enhanced Path Planner for Electric Vehicles Considering User-Defined Time Windows and Preferences. Energies 2023, 16, 4173. https://doi.org/10.3390/en16104173
Cubillos M, Dell’Amico M, Jabali O, Malucelli F, Tresoldi E. An Enhanced Path Planner for Electric Vehicles Considering User-Defined Time Windows and Preferences. Energies. 2023; 16(10):4173. https://doi.org/10.3390/en16104173
Chicago/Turabian StyleCubillos, Maximiliano, Mauro Dell’Amico, Ola Jabali, Federico Malucelli, and Emanuele Tresoldi. 2023. "An Enhanced Path Planner for Electric Vehicles Considering User-Defined Time Windows and Preferences" Energies 16, no. 10: 4173. https://doi.org/10.3390/en16104173
APA StyleCubillos, M., Dell’Amico, M., Jabali, O., Malucelli, F., & Tresoldi, E. (2023). An Enhanced Path Planner for Electric Vehicles Considering User-Defined Time Windows and Preferences. Energies, 16(10), 4173. https://doi.org/10.3390/en16104173