
Developing a Simulation Model to Numerically Estimate Energy Parameters and Wave Energy Converter Efficiency of a Floating Wave Power Plant

 ,
,  , ,
, , 
Abstract
1. Introduction
- (1)
- Developing the 3-D model structure with dimensional parameters;
- (2)
- Determining the computational region with flow boundaries;
- (3)
- Setting initial and boundary conditions taking into consideration the operating medium properties;
- (4)
- Calculation, monitoring and precision analysis of results;
- (5)
- Visual representation of the calculation results, i.e., graph plotting the target parameters.
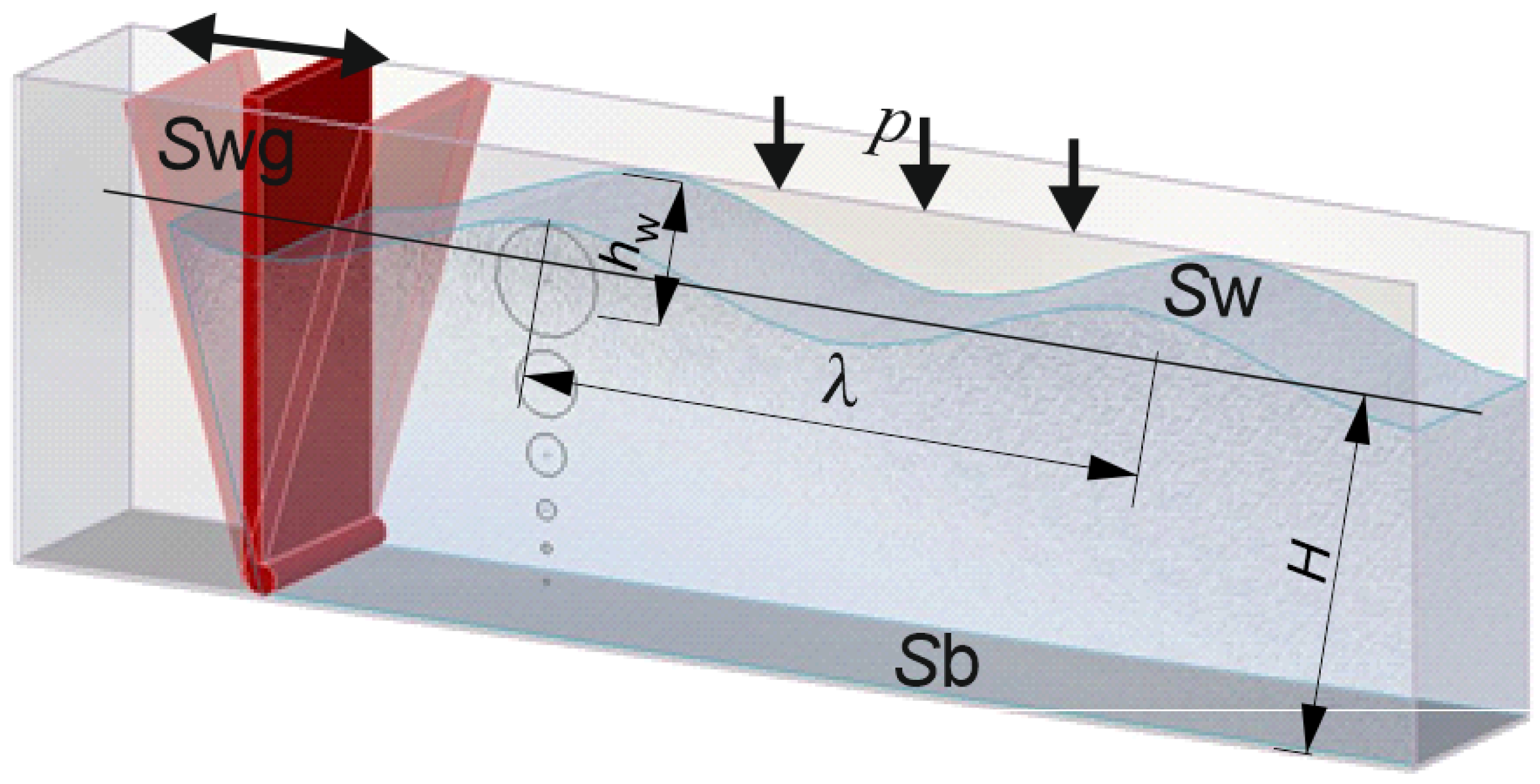
2. Simulation Model Development
2.1. Developing the Body 3-D Model with Parametric Dimensions
2.2. Determining the Computational Region (Grid) with the Indication of Flow Region Boundaries
2.3. Setting Initial and Boundary Conditions with Operating Medium Property Adjustment
2.4. Calculation with Monitoring and Task Convergence Analysis
3. Results Obtained
3.1. Results of the Problem Solved in 2-D Arrangement for One Wave Period
3.2. Results of the Problem Solved in a 2-D Arrangement for Three Wave Periods
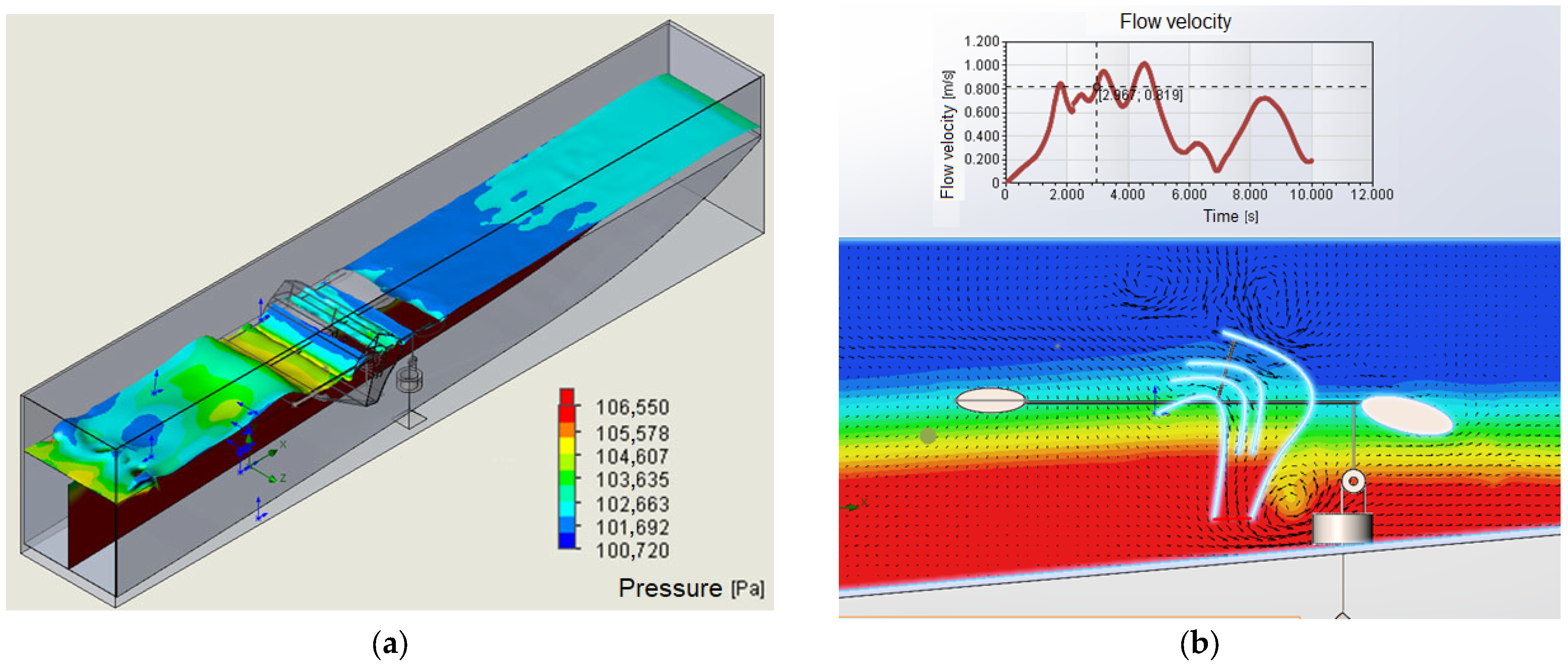
3.3. Analyzing Results to Solve a 3-D Problem for One Period
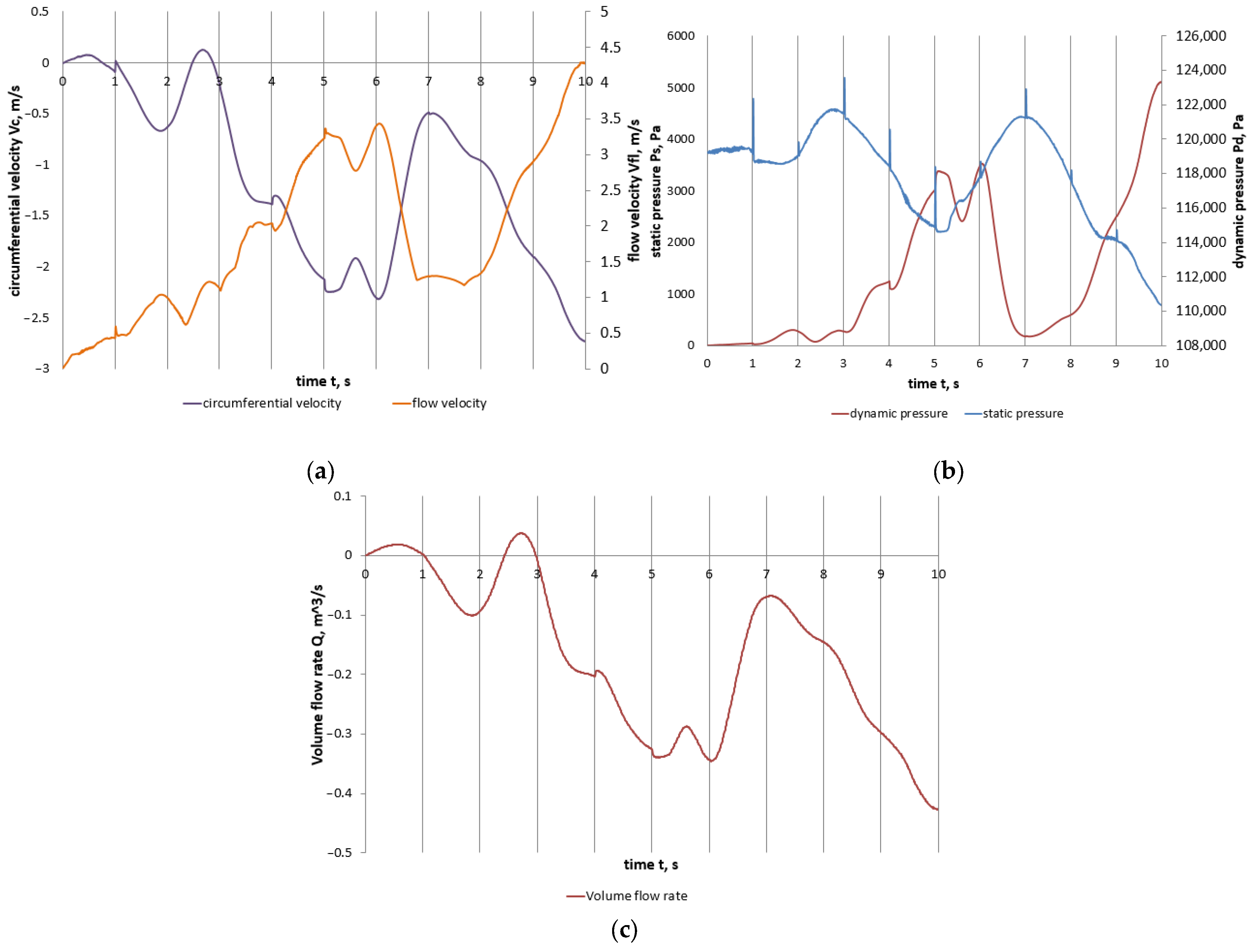
4. Calculation Result Visualization: Obtaining Target Parameter Diagrams
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Balmer, M.; Spreng, D. Hydroelectric Power. In Future Energy; Elsevier: Amsterdam, The Netherlands, 2008; pp. 193–209. [Google Scholar]
- World Energy Council. Survey of Energy Resources (PDF); Tidal Energy; World Energy Council: London, UK, 2009; Volume 12, pp. 75–77. [Google Scholar]
- European Parliament and of the Council of 23 April 2009 on the Promotion of the Use of Energy from Renewable Sources; Directive 2009/28/EC. 2009. Available online: https://eur-lex.europa.eu/LexUriServ/LexUriServ.do?uri=OJ:L:2009:140:0016:0062:en:PDF (accessed on 13 May 2023).
- O’Rourke, F.; Boyle, F.; Reynolds, A. Tidal Energy Update 2009. Appl. Energy 2010, 87, 398–409. [Google Scholar] [CrossRef]
- Bildirici, M.E.; Gökmenoğlu, S.M. Environmental pollution, hydropower energy consumption and economic growth: Evidence from G7 countries. Renew. Sustain. Energy Rev. 2017, 75, 68–85. [Google Scholar] [CrossRef]
- Walczak, N. Operational Evaluation of a Small Hydropower Plant in the Context of Sustainable Development. Water 2018, 10, 1114. [Google Scholar] [CrossRef]
- Larinier, M. Fish passage experience at small-scale hydro-electric power plants in France. Hydrobiologia 2008, 609, 97–108. [Google Scholar] [CrossRef]
- Başkaya, Ş.; Başkaya, E.; Sari, A. The principal negative environmental impacts of small hydropower plants in Turkey. Afr. J. Agric. Res. 2011, 6, 3284–3290. [Google Scholar]
- Valero, E. Characterization of the water quality status on a stretch of River Lérez around a small hydroelectric power station. Water 2012, 4, 815–834. [Google Scholar] [CrossRef]
- Jesus, T.; Formigo, N.; Santos, P.; Tavares, G.R. Impact evaluation of the Vila Viçosa small hydroelectric power plant (Portugal) on the water quality and on the dynamics of the benthic macroinvertebrate communities of the Ardena River. Limnetica 2004, 23, 241–255. [Google Scholar] [CrossRef]
- Pang, M.; Zhang, L.; Ulgiati, S.; Wang, C. Ecological impacts of small hydropower in China: Insights from an emergy analysis of a case plant. Energy Policy 2015, 76, 112–122. [Google Scholar] [CrossRef]
- Mayor, B.; Rodríguez-Muñoz, I.; Villarroya, F.; Montero, E.; López-Gunn, E. The role of large and small scale hydropower for energy and water security in the Spanish Duero Basin. Sustainability 2017, 9, 1807. [Google Scholar] [CrossRef]
- Botelho, A.; Ferreira, P.; Lima, F.; Pinto, L.M.C.; Sousa, S. Assessment of the environmental impacts associated with hydropower. Renew. Sustain. Energy Rev. 2017, 70, 896–904. [Google Scholar] [CrossRef]
- Singal, S.K.; Saini, R.P. Analytical approach for development of correlations for cost of canal-based SHP schemes. Renew. Energy 2008, 33, 2549–2558. [Google Scholar] [CrossRef]
- Vougioukli, A.Z.; Didaskalou, E.; Georgakellos, D. Financial appraisal of small hydro-power considering the cradle-to-grave environmental cost: A case from Greece. Energies 2017, 10, 430. [Google Scholar] [CrossRef]
- Punys, P.; Dumbrauskas, A.; Kvaraciejus, A.; Vyciene, G. Tools for small hydropower plant resource planning and development: A review of technology and applications. Energies 2011, 4, 1258–1277. [Google Scholar] [CrossRef]
- Zeleňáková, M.; Fijko, R.; Diaconu, D.C.; Remeňáková, I. Environmental impact of small hydro power plant—A case study. Environments 2018, 5, 12. [Google Scholar] [CrossRef]
- López Solano, C.; Turki, E.I.; Hamdi, Y.; Soloy, A.; Costa, S.; Laignel, B.; Gutiérrez Barceló, Á.D.; Abcha, N.; Jacono, D.; Lafite, R. Dynamics of Nearshore Waves during Storms: Case of the English Channel and the Normandy Coasts. Water 2022, 14, 321. [Google Scholar] [CrossRef]
- Didier, D.; Bernatchez, P.; Boucher-Brossard, G.; Lambert, A.; Fraser, C.; Barnett, R.L.; Van-Wierts, S. Coastal Flood Assessment Based on Field Debris Measurements and Wave Runup Empirical Model. J. Mar. Sci. Eng. 2015, 3, 560–590. [Google Scholar] [CrossRef]
- Chin, D.A.; Mazumdar, A.; Roy, P.K. Water-Resources Engineering; Prentice Hall: Englewood Cliffs, NJ, USA, 2000. [Google Scholar]
- Parameshwaran, R.; Dhulipalla, S.J.; Yendluri, D.R. Fluid-Structure Interactions and Flow Induced Vibrations: A Review. Procedia Eng. 2016, 144, 1286–1293. [Google Scholar] [CrossRef]
- Arias, I.; Knap, J.; Chalivendra, V.B.; Hong, S.; Ortiz, M.; Rosakis, A.J. Numerical Modelling and Experimental Validation of Dynamic Fracture Events along Weak Planes. Comput. Methods Appl. Mech. Eng. 2007, 196, 3833–3840. [Google Scholar] [CrossRef]
- Hou, G.; Wang, J.; Layton, A. Numerical Methods for Fluid-Structure Interaction—A Review. Commun. Comput. Phys. 2012, 12, 337–377. [Google Scholar] [CrossRef]
- Zawawi, M.H.; Saleha, A.; Salwa, A.; Hassan, N.H.; Zahari, N.M.; Ramli, M.Z.; Muda, Z.C. A Review: Fundamentals of Computational Fluid Dynamics (CFD). AIP Conf. Proc. 2018, 2030, 20252. [Google Scholar] [CrossRef]
- Singarella, P.N.; Adams, E.E. Physical and Numerical Modeling of the External Fluid Mechanics of OTEC Pilot Plants; Massachusetts Institute of Technology, Energy Laboratory: Cambridge, MA, USA, 1982. [Google Scholar]
- Hellgren, R. Influence of Fluid Structure Interaction on a Concrete Dam during Seismic Excitation: Parametric Analyses of an Arch Dam-Reservoir-Foundation System. In Proceedings of the Second International Dam World Conference, Lisbon, Portugal, 21–24 April 2015. [Google Scholar]
- Salem-Said, A.-H.; Fayed, H.; Ragab, S. Numerical Simulations of Two-Phase Flow in a Dorr-Oliver Flotation Cell Model. Minerals 2013, 3, 284–303. [Google Scholar] [CrossRef]
- Bertolazzi, E.; Manzini, G. A cell-centered second-order accurate finite volume method for convection-diffusion problems on unstructured meshes. Math. Model. Methods Appl. Sci. 2004, 14, 1235–1260. [Google Scholar] [CrossRef]
- Soucek, O. A Brief Introduction to Fluid-Structure Interactions Fluid-Structure Interactions Teaching Slides. 2012. Available online: https://geo.mff.cuni.cz/jednooci_slepym/os-FSI-intro.pdf (accessed on 29 March 2023).
- Fu, C.; Hafliðason, B. Progressive Failure Analyses of Concrete Buttress Dams: Influence of Crack Propagation on the Structural Dam Safety in Concrete Structures; Stockholm University: Stockholm, Sweden, 2015. [Google Scholar]
- Zawawi, M.H.; Hassan, N.H.; Ramli, M.Z.; Zahari, N.M.; Radzi, M.R.M.; Saleha, A.; Salwa, A.; Sidek, L.M.; Muda, Z.C.; Kamaruddin, M.A. Fluid-Structure Interactions Study on Hydraulic Structures: A Review. AIP Conf. Proc. 2018, 2030, 20244. [Google Scholar]
- Chizhiumov, S.D.; Kamenskih, I.V. The Models of Sea Waves Energy Converters. In Proceedings of the Tenth ISOPE Pacific-Asia Offshore Mechanics Symposium (PACOMS 2012), Vladivostok, Russia, 3–5 October 2012. [Google Scholar]
- Morton, I.D.; Bowers, J.; Mould, G. Estimating return period wave heights and wind speeds using a seasonal point process model. Coast. Eng. 1997, 3, 305–326. [Google Scholar] [CrossRef]
- Owens, E.H.; Schwartz, M. (Eds.) Beaches and Coastal Geology; Encyclopedia of Earth Sciences Series; Springer US: New York, NY, USA, 1984; p. 722. ISBN 9780879332136. [Google Scholar] [CrossRef]
- Reference material, Waves. The Bureau of Meteorology Provides Forecasts of Wave (Sea and Swell) Heights in Metres. 2023. Available online: http://www.bom.gov.au/marine/knowledge-centre/reference/waves.shtml (accessed on 5 May 2023).
- Wang, R.; Wan, J.; Cheng, R.; Wang, Y.; Wang, Z. Physical and Numerical Simulation of the Mechanism Underpinning Accumulation Layer Deformation, Instability, and Movement Caused by Changing Reservoir Water Levels. Water 2023, 15, 1289. [Google Scholar] [CrossRef]
- Zhou, J.; Li, Y. Modeling of the Free-Surface-Pressurized Flow of a Hydropower System with a Flat Ceiling Tail Tunnel. Water 2020, 12, 699. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
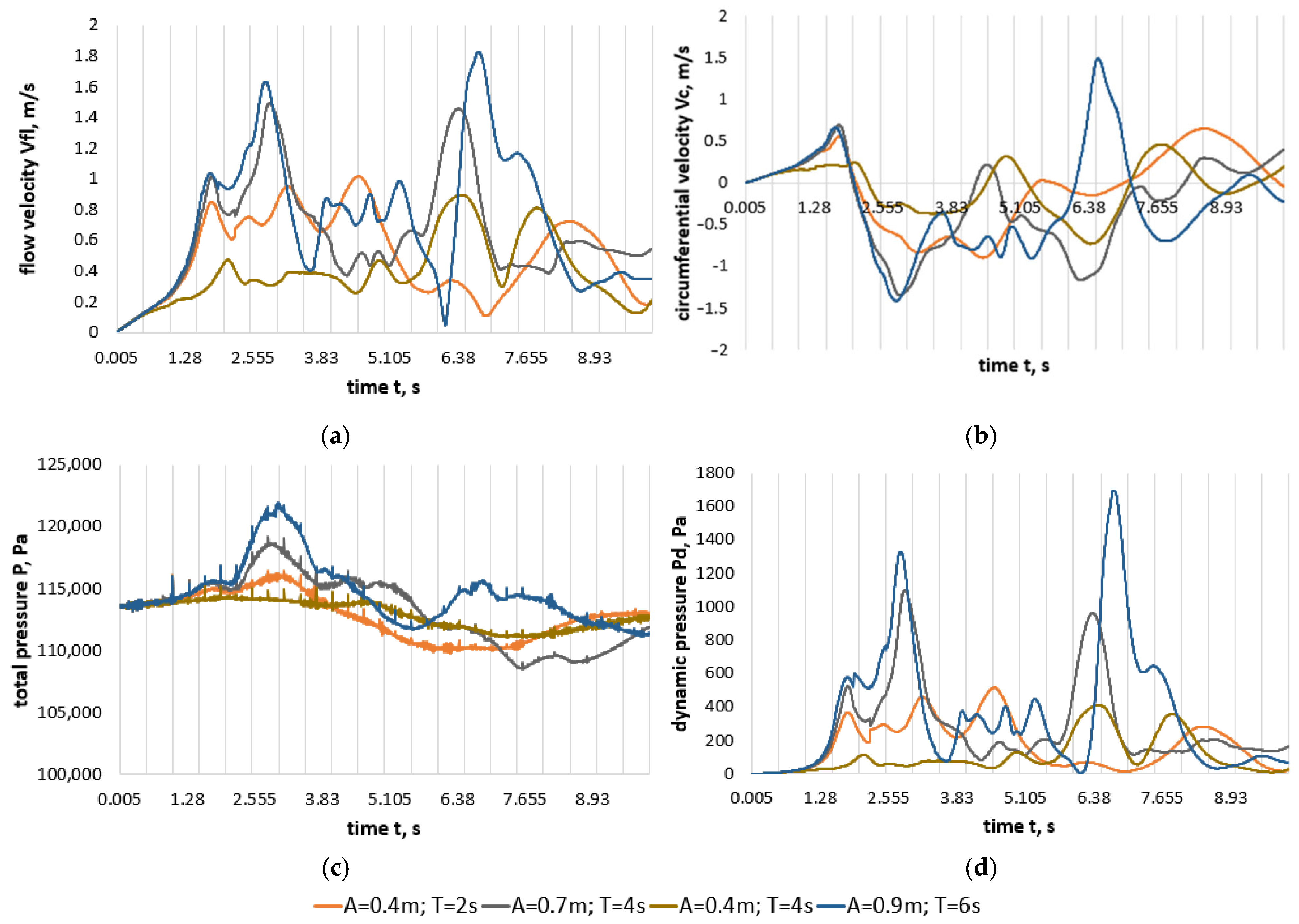
| Wave-Product Parameter Value (A—Amplitude, kPa; T—Period, s) | Wave Parameter Value (A—Amplitude (Maximum), m; T—Period, s) |
|---|---|
| A = 103 kPa, T = 1 s | A = 0.4 m; T = 4 s |
| A = 106 kPa, T = 2 s | A = 0.9 m; T = 6 s |
| A = 106 kPa, T = 0.5 s | A = 0.4 m; T = 2 s |
| A = 106 kPa, T = 1 s | A = 0.7 m; T = 4 s |
| Name | Current Value | Convergence Progress | Criterion | Mean Value | |
|---|---|---|---|---|---|
| Mass water discharge rate | −0.238142 kg/s | == | 37% | 0.015869 kg/s | −0.24 kg/s |
| Volume water discharge rate | −0.00023844 m3/s | == | 37% | 1.59e-05 m3/s | −0.0002 m3/s |
| Mean dynamic pressure | 141.535 Pa | ===== | 100% | 1.96204 Pa | 142.273 Pa |
| Mean circumferential velocity | −0.02909867 m/s | == | 36% | 0.00225 m/s | −0.03236 m/s |
| Mean total pressure | 111622 Pa | === | 55% | 20.7976 Pa | 111707 Pa |
| Mean velocity | 0.481418 m/s | === | 59% | 0.002217 m/s | 0.48223 m/s |
| Mean static pressure | 111480 Pa | === | 51% | 20.0992 Pa | 111565 Pa |
| Value | Pressure p, Pa | Qm, kg/s | vav, m/s | vmax, m | ||
|---|---|---|---|---|---|---|
| Static | Total | Dynamic | ||||
| Mean | 110,505 | 110,515 | 9.97 | 166.3 | 0.33 | 0.80 |
| Minimum | 110,414 | 110,424 | 9.45 | −36.2 | 0.12 | 0.20 |
| Maximum (time, s) | 115,500 (1.005) | 115,517 (1.005) | 384 (2.455) | 405.8 (10) | 0.93 (2.455) | 1.61 (2.455) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhelonkin, M.; Kurkin, A.; Loskutov, A.; Plekhov, A.; Malyarov, D.; Kryukov, E. Developing a Simulation Model to Numerically Estimate Energy Parameters and Wave Energy Converter Efficiency of a Floating Wave Power Plant. Energies 2023, 16, 4150. https://doi.org/10.3390/en16104150
Zhelonkin M, Kurkin A, Loskutov A, Plekhov A, Malyarov D, Kryukov E. Developing a Simulation Model to Numerically Estimate Energy Parameters and Wave Energy Converter Efficiency of a Floating Wave Power Plant. Energies. 2023; 16(10):4150. https://doi.org/10.3390/en16104150
Chicago/Turabian StyleZhelonkin, Maxim, Andrey Kurkin, Alexey Loskutov, Alexander Plekhov, Dmitry Malyarov, and Evgeny Kryukov. 2023. "Developing a Simulation Model to Numerically Estimate Energy Parameters and Wave Energy Converter Efficiency of a Floating Wave Power Plant" Energies 16, no. 10: 4150. https://doi.org/10.3390/en16104150
APA StyleZhelonkin, M., Kurkin, A., Loskutov, A., Plekhov, A., Malyarov, D., & Kryukov, E. (2023). Developing a Simulation Model to Numerically Estimate Energy Parameters and Wave Energy Converter Efficiency of a Floating Wave Power Plant. Energies, 16(10), 4150. https://doi.org/10.3390/en16104150