
Maximum Power Tracking Control of Wind Turbines Based on a New Prescribed Performance Function

 , and
, and
Abstract
:1. Introduction
2. Preliminaries and Problem Formulation
2.1. Problem Formulation
- (a)
- In closed-loop systems, the intermediate signals are constrained;
- (b)
- The preset performance tracking (PPT) is achieved, i.e., there are matching parameter values for every and ensuring when , where is the target reference signal.
2.2. Some Lemmas and Definitions
- is a continuous and non–increasing function from an initial to a terminal value , where , , are given as constants greater than 0.
- ; When , and thus .
2.3. Definition of a New Variable
3. Results
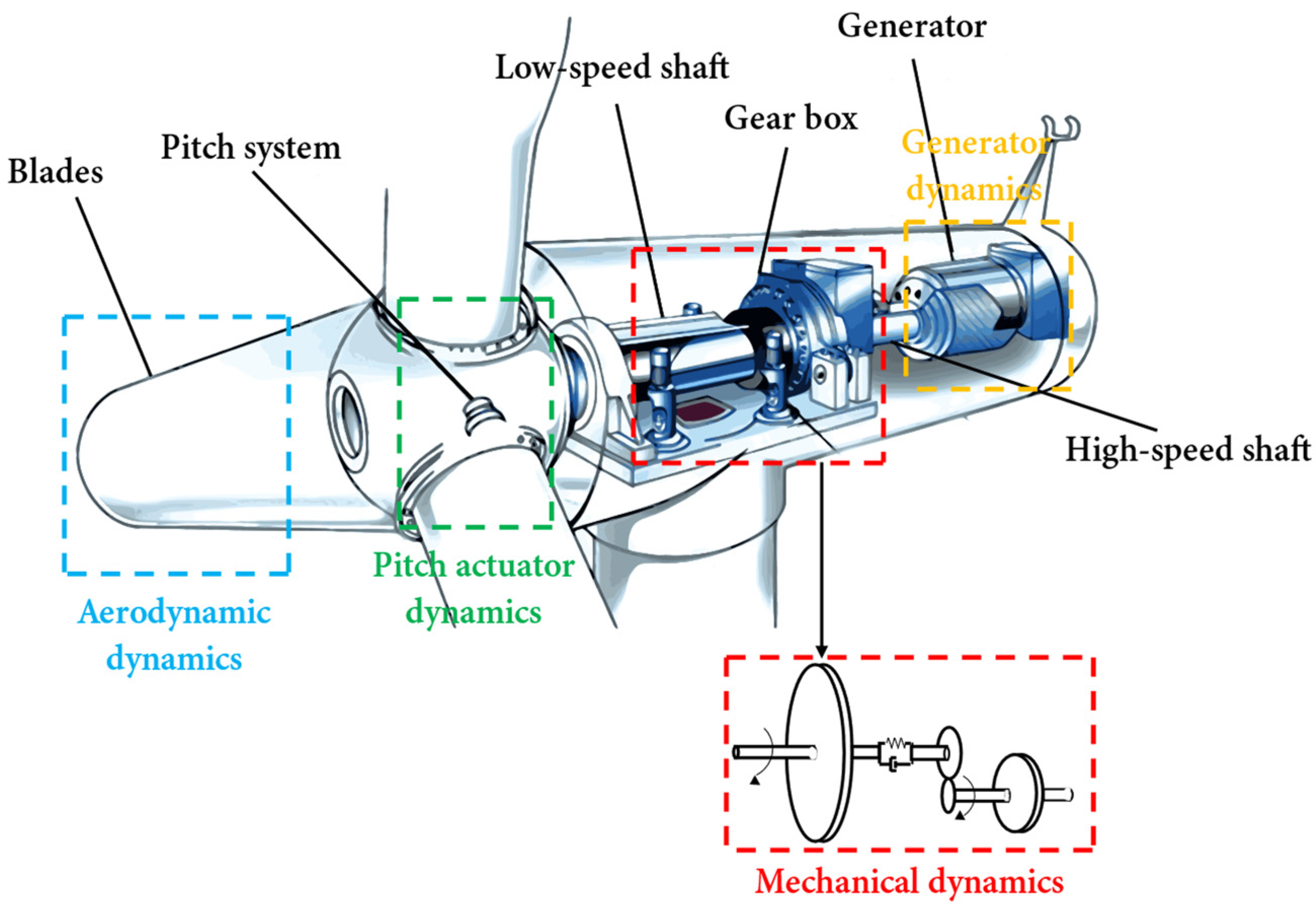
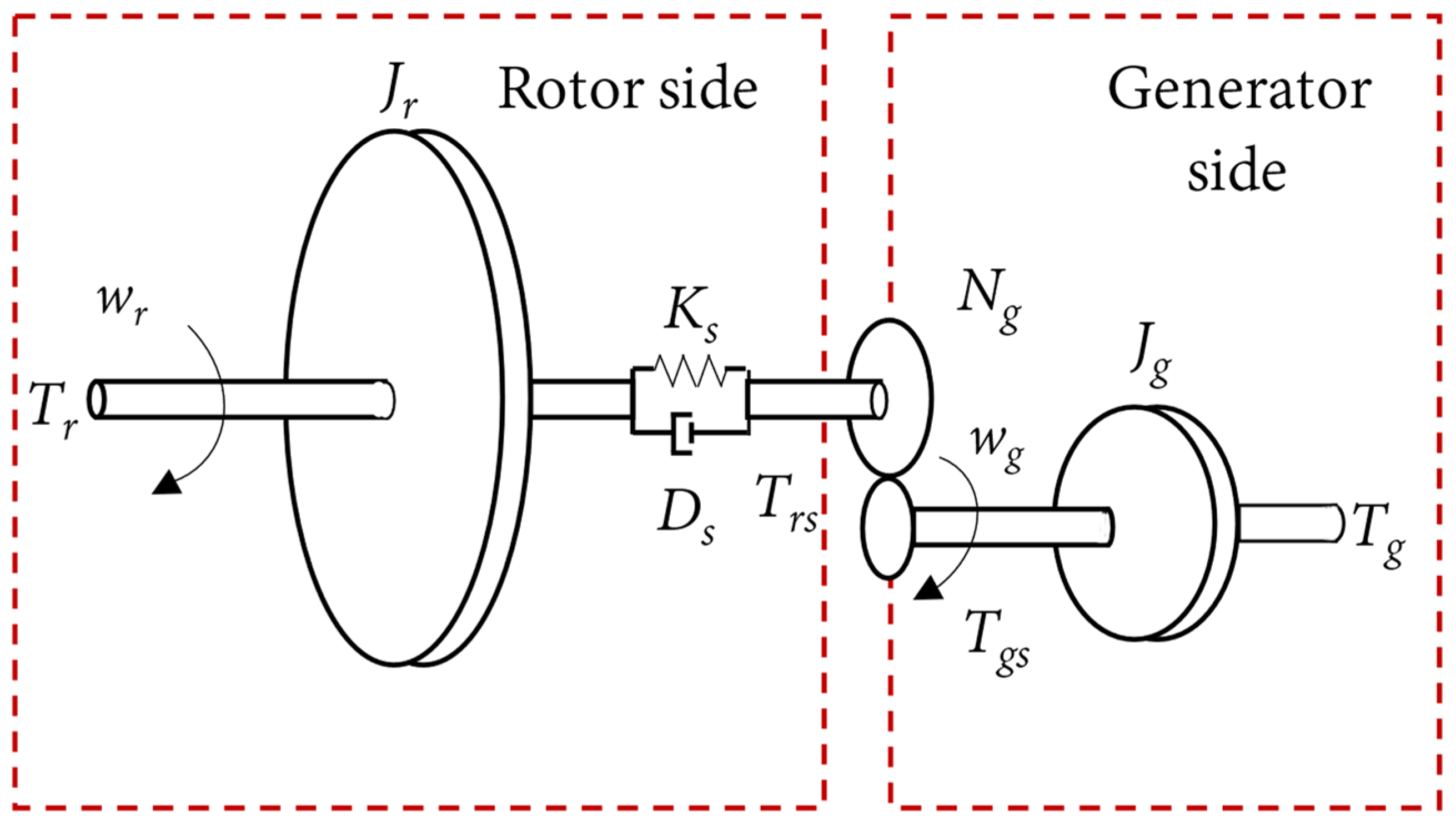
3.1. Modelling of Wind Turbines
3.2. Error Transformation
3.3. Direct Robust Control (DRC) Scheme
3.4. System Feasibility Analysis
- (a)
- The closed-loop system is stable.
- (b)
- The tracking error converges to the designated area within the designated period , where and are predetermined values provided by the user.
- (c)
- Each and every intermediate signal has a limit, i.e., bounded.
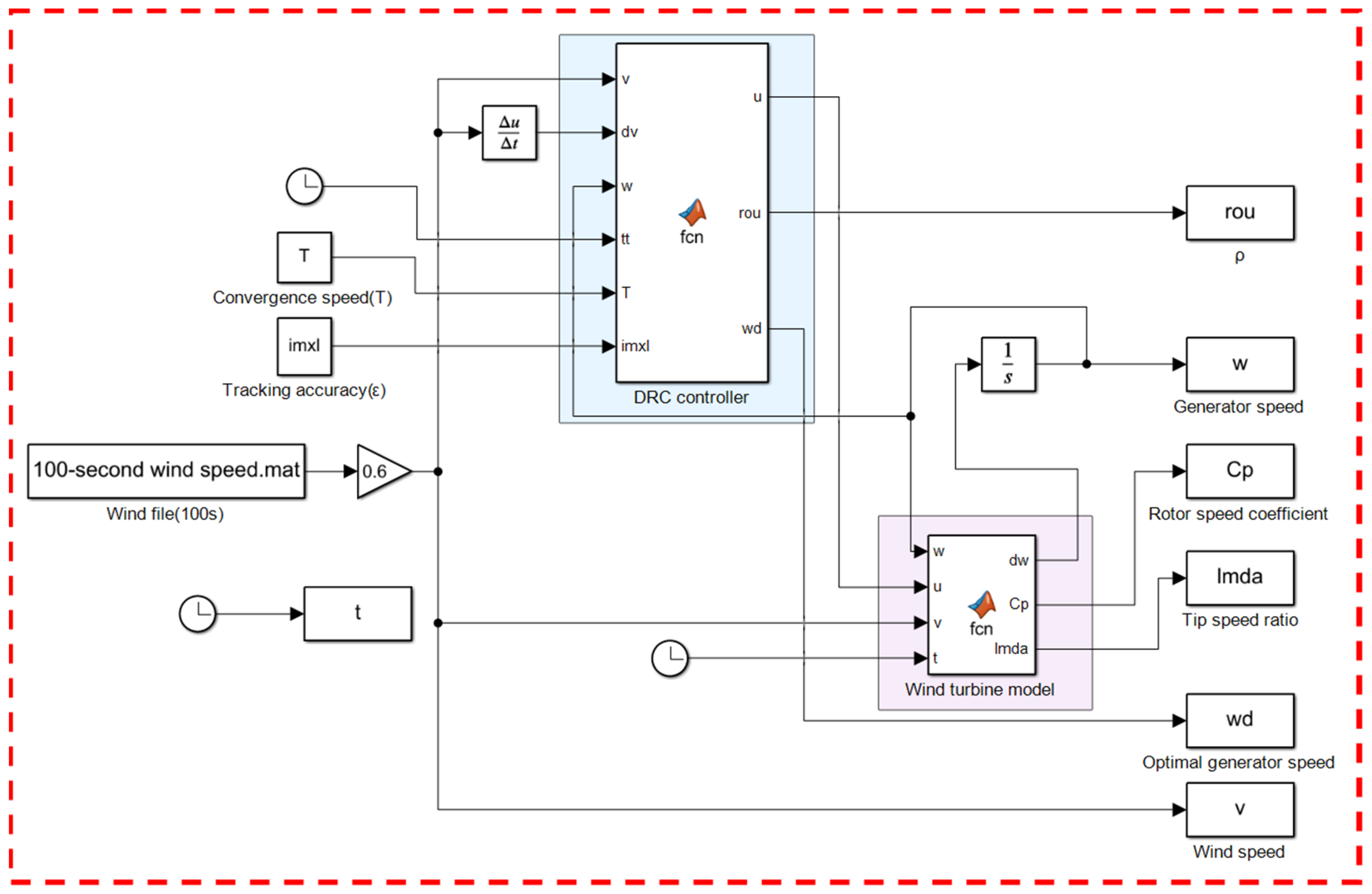
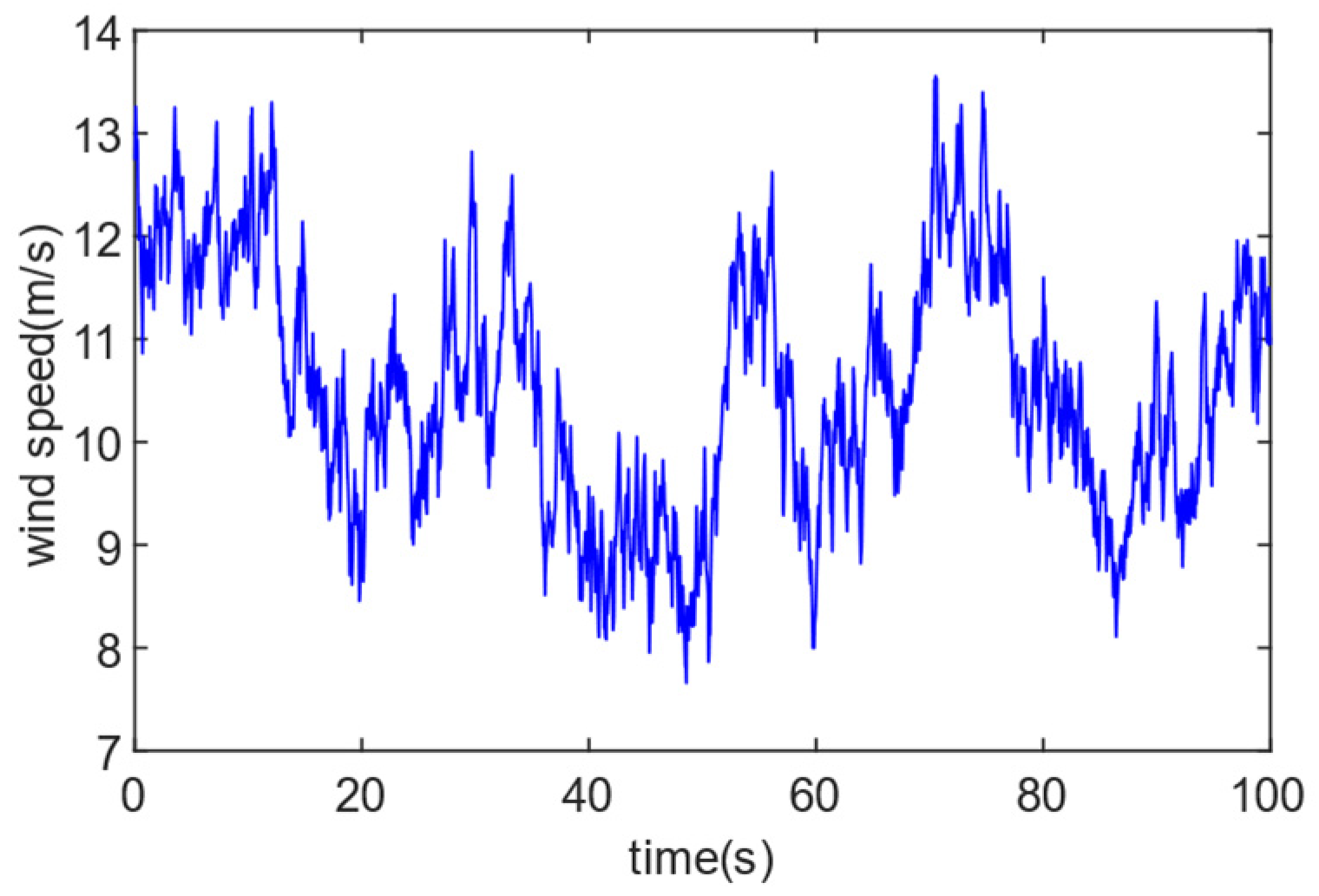
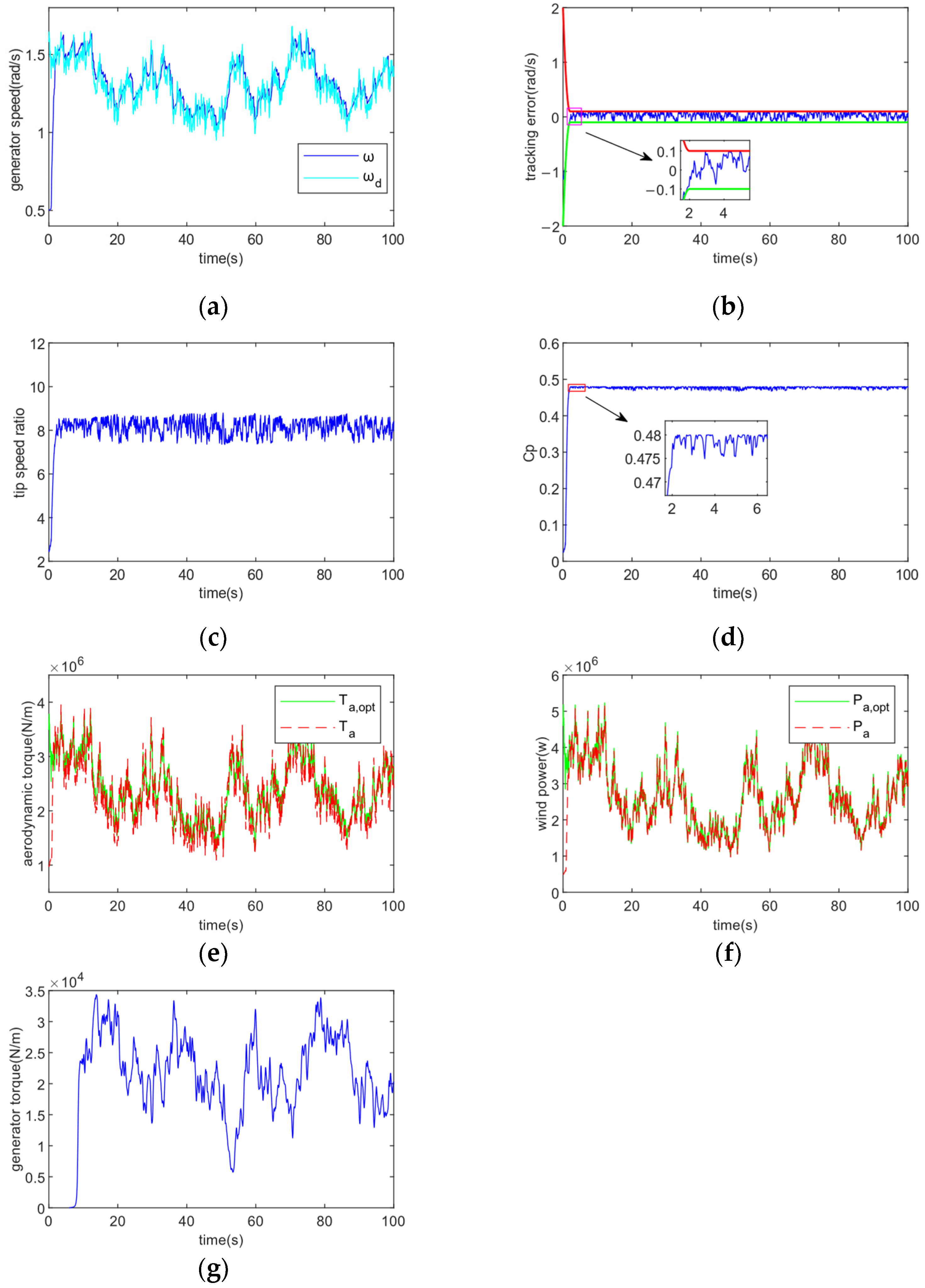
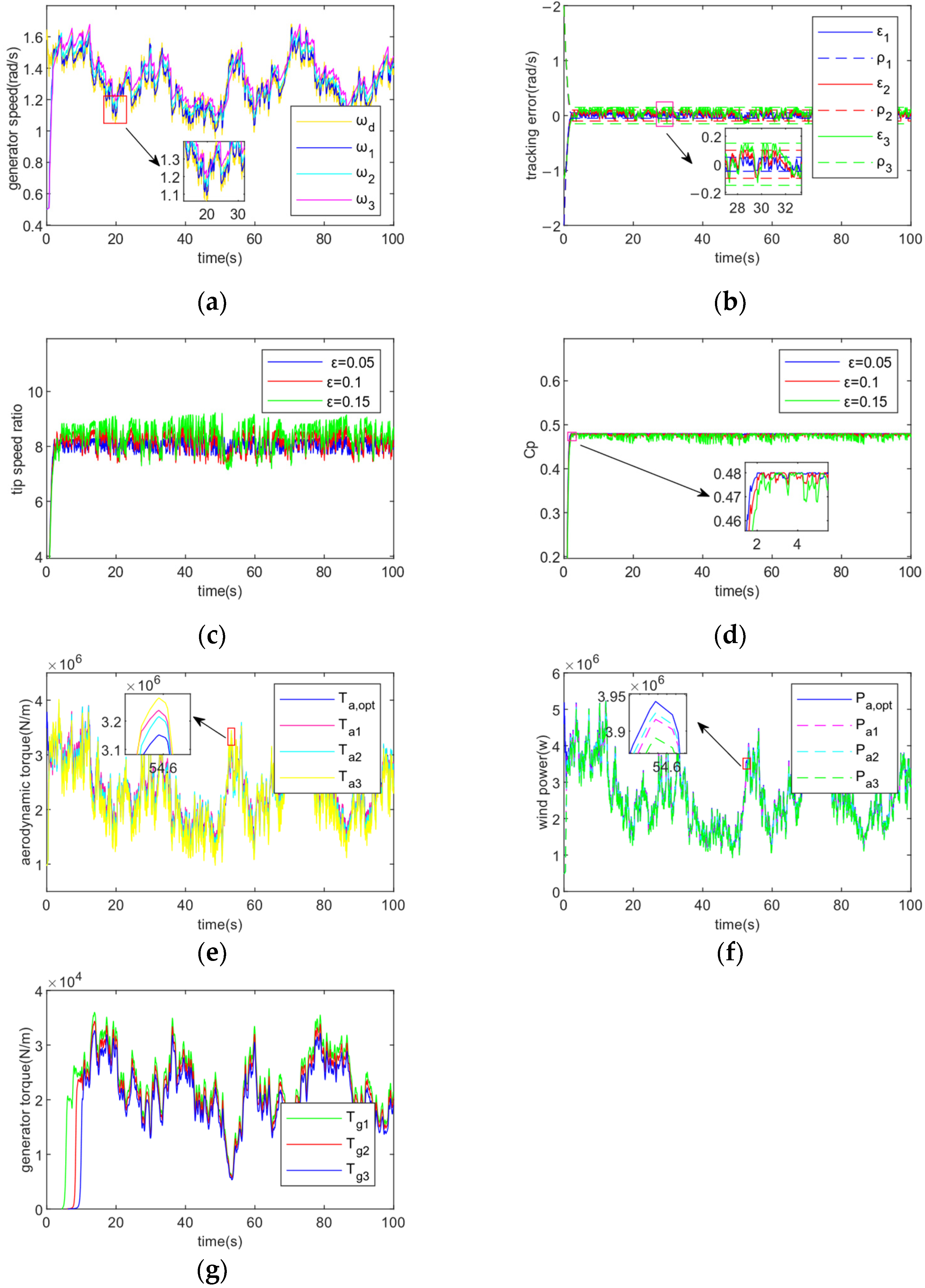
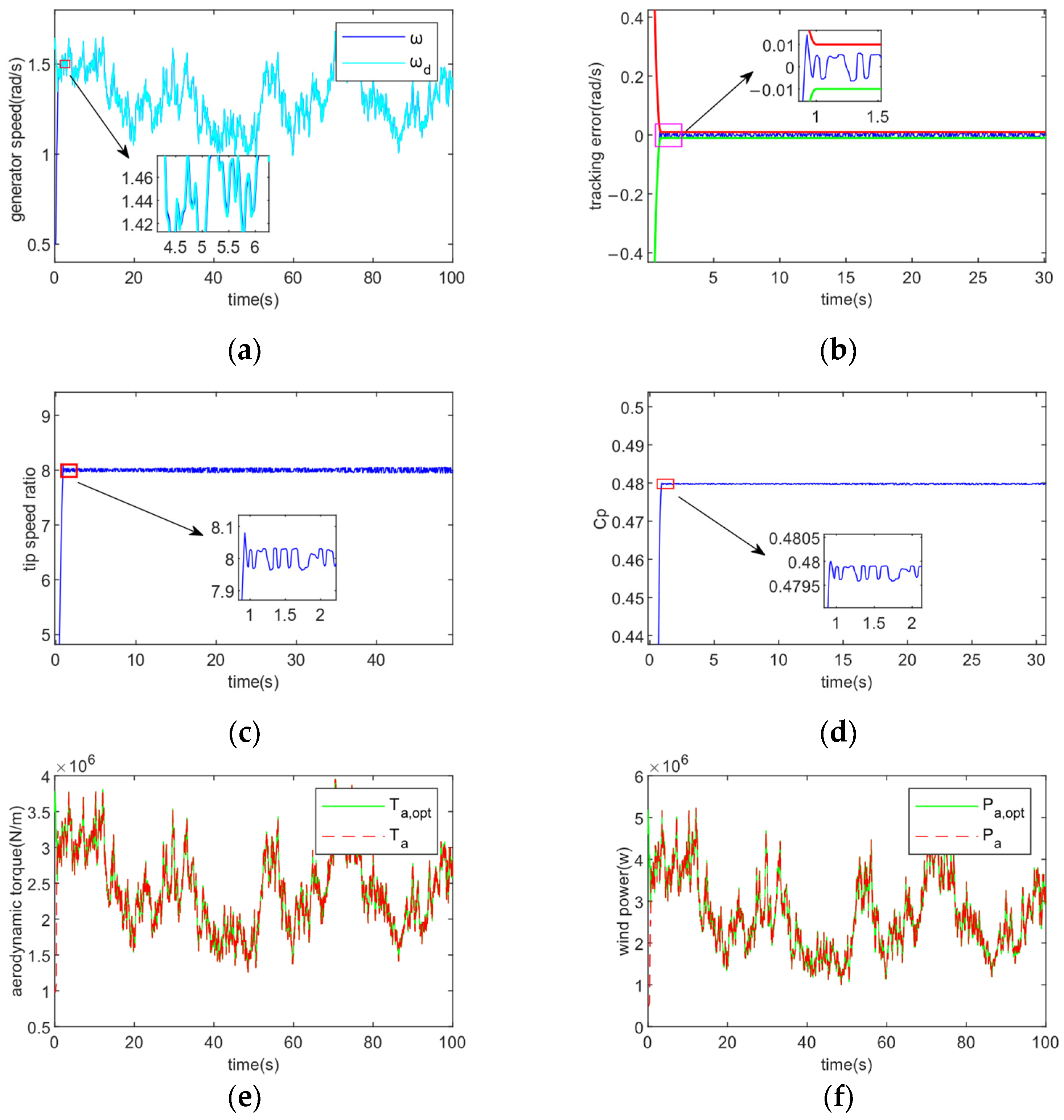
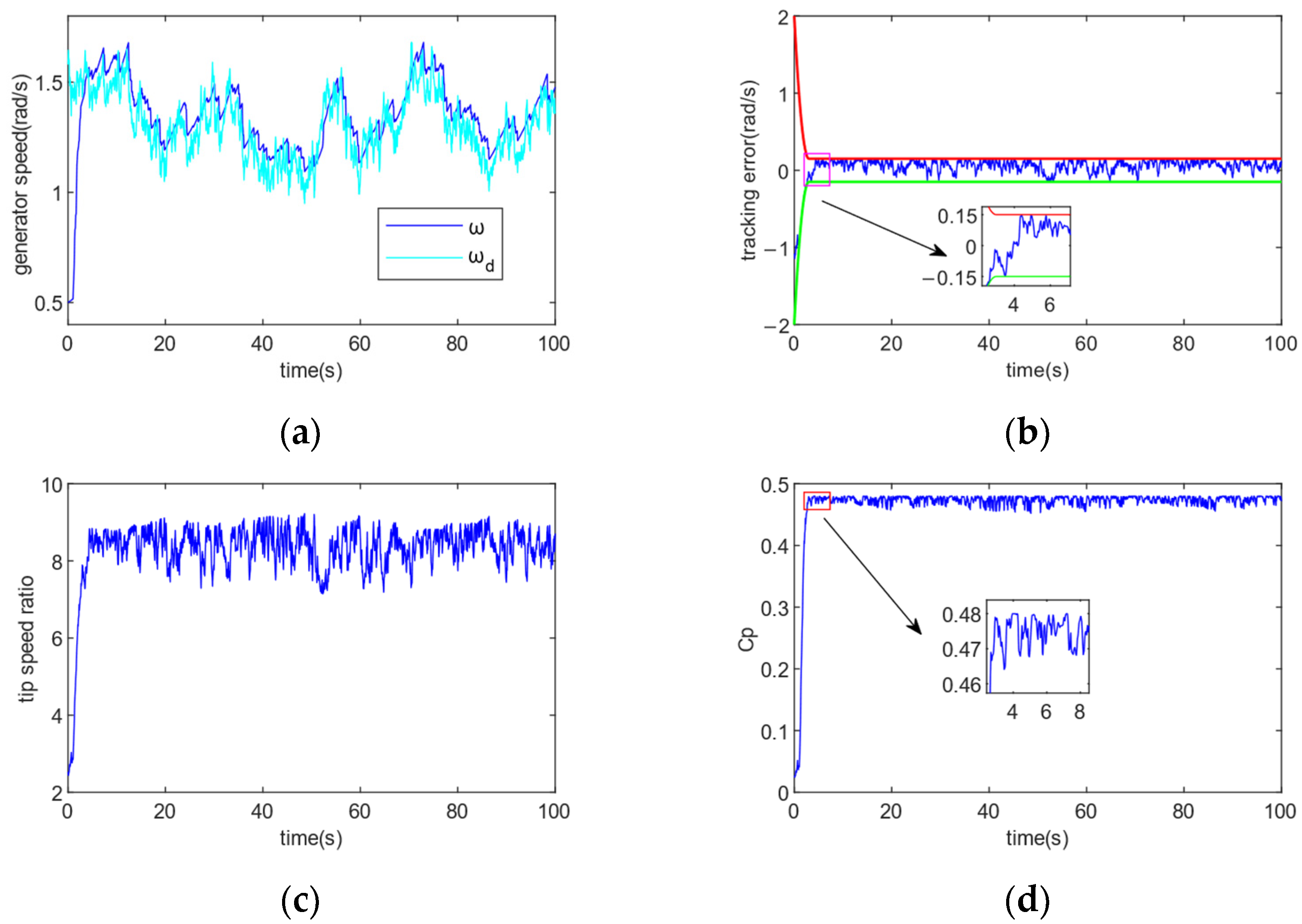
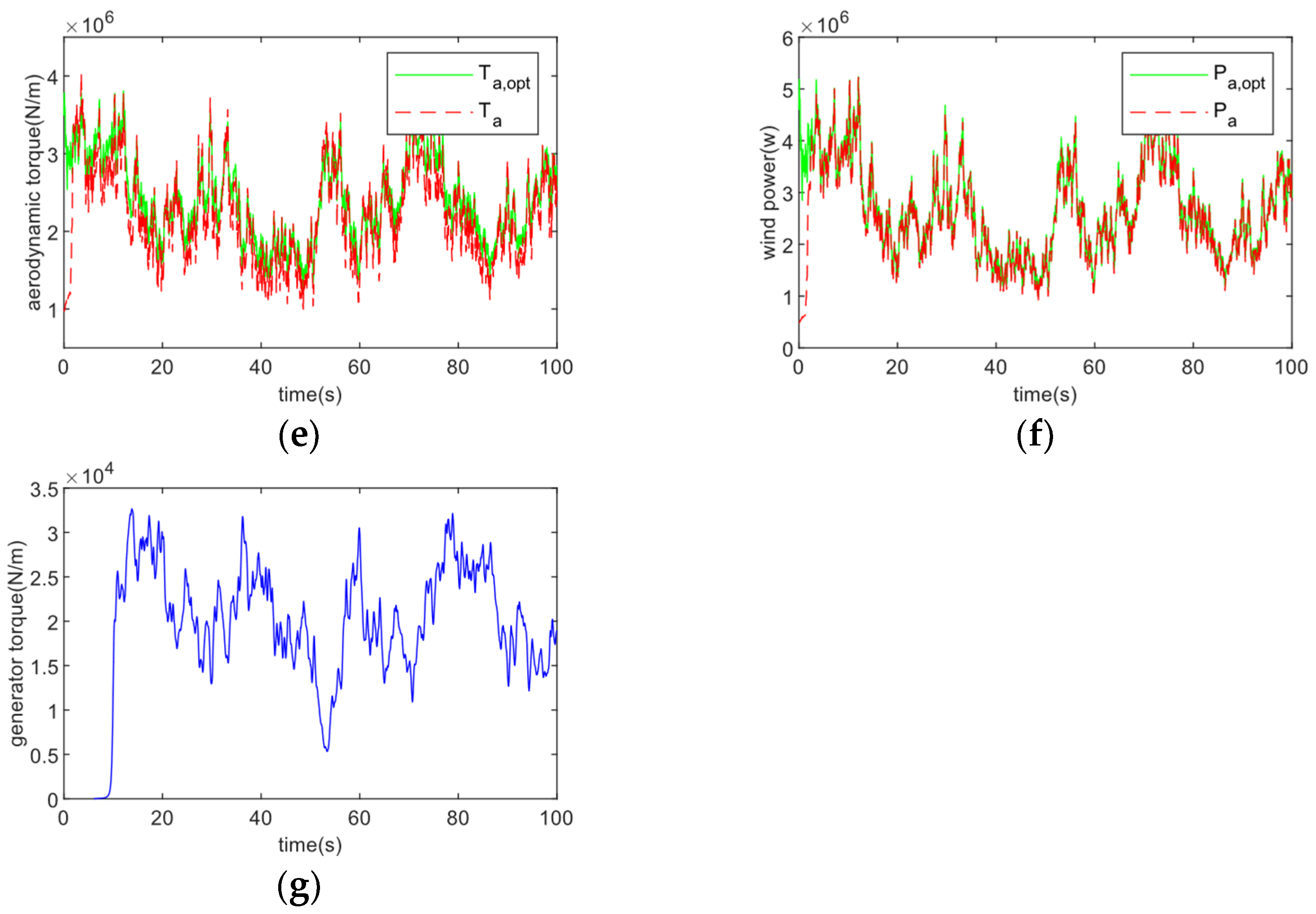
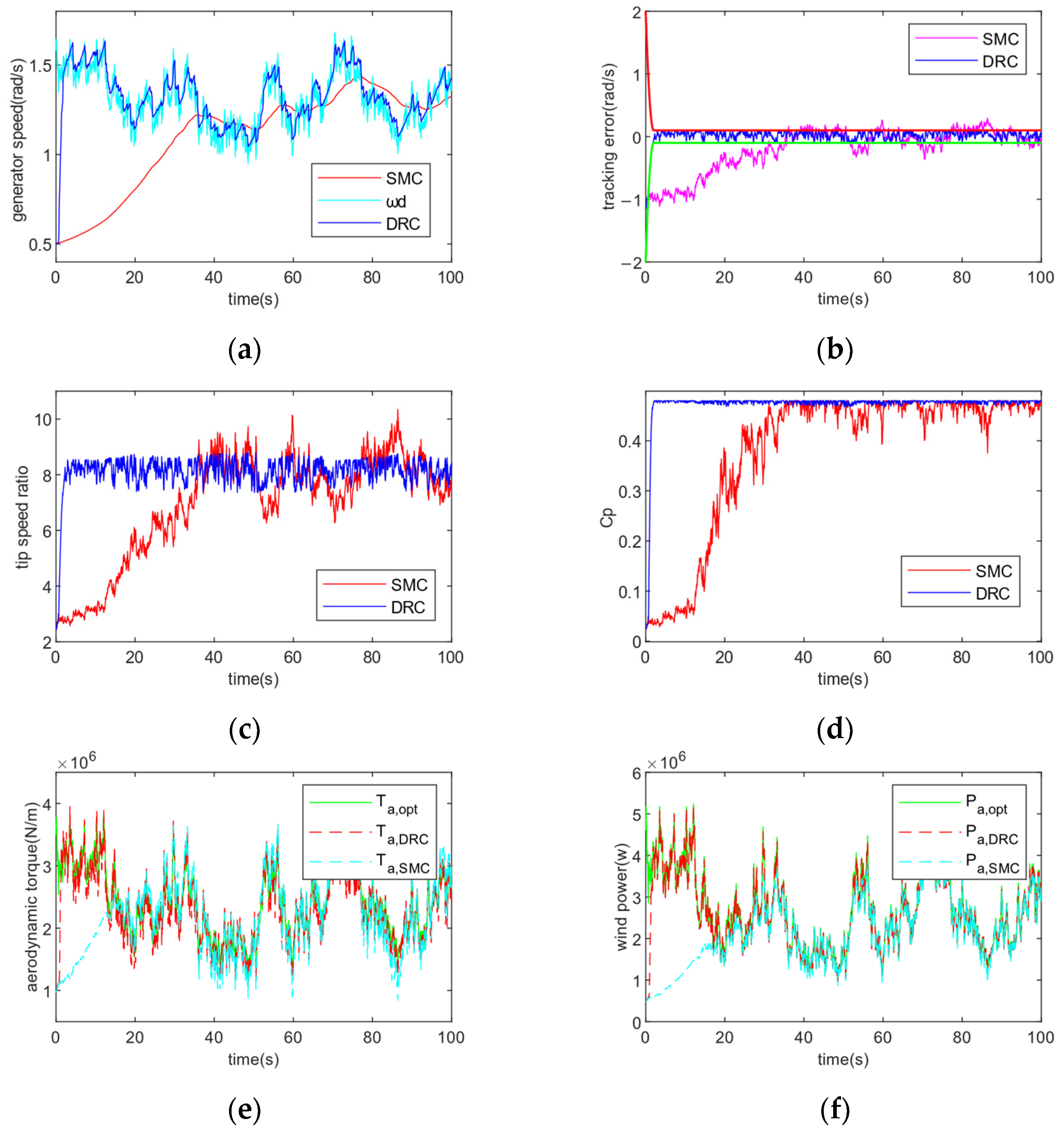
4. Simulation Study
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cao, Y.; Cao, J.; Song, Y. Practical prescribed time tracking control over infinite time interval involving mismatched uncertainties and non-vanishing disturbances. Automatica 2022, 136, 110050. [Google Scholar] [CrossRef]
- Cheng, M.; Zhu, Y. The state of the art of wind energy conversion systems and technologies: A review. Energy Convers. Manag. 2014, 88, 332–347. [Google Scholar] [CrossRef]
- Jin, F.; Ran, Q. Maximum Power Control of Wind Turbines with Practical Prescribed Time Stability Based on Wind Estimation. In Proceedings of the 2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 4–6 March 2022; pp. 1775–1778. [Google Scholar]
- Yin, M.; Li, W.; Chung, C.Y.; Zhou, L.; Chen, Z.; Zou, Y. Optimal torque control based on effective tracking range for maximum power point tracking of wind turbines under varying wind conditions. IET Renew. Power Gener. 2017, 11, 501–510. [Google Scholar] [CrossRef]
- Abdullah, M.A.; Yatim, A.; Tan, C.W. A study of maximum power point tracking algorithms for wind energy system. In Proceedings of the 2011 IEEE Conference on Clean Energy and Technology (CET), Kuala Lumpur, Malaysia, 27–29 June 2011; pp. 321–326. [Google Scholar]
- Hu, L.; Xue, F.; Qin, Z.; Shi, J.; Qiao, W.; Yang, W.; Yang, T. Sliding mode extremum seeking control based on improved invasive weed optimization for MPPT in wind energy conversion system. Appl. Energy 2019, 248, 567–575. [Google Scholar] [CrossRef]
- Song, D.; Yang, J.; Cai, Z.; Dong, M.; Su, M.; Wang, Y. Wind estimation with a non-standard extended Kalman filter and its application on maximum power extraction for variable speed wind turbines. Appl. Energy 2017, 190, 670–685. [Google Scholar] [CrossRef]
- Tan, Y.; Wu, L. Neuro-adaptive practical prescribed-time control for pure-feedback nonlinear systems without accurate initial errors. Int. J. Adapt. Control Signal Process. 2023, 37, 915–933. [Google Scholar] [CrossRef]
- Krishnamurthy, P.; Khorrami, F.; Krstic, M. Robust adaptive prescribed-time stabilization via output feedback for uncertain nonlinear strict-feedback-like systems. Eur. J. Control 2020, 55, 14–23. [Google Scholar] [CrossRef]
- Krishnamurthy, P.; Khorrami, F.; Krstic, M. A dynamic high-gain design for prescribed-time regulation of nonlinear systems. Automatica 2020, 115, 108860. [Google Scholar] [CrossRef]
- Song, Y.; Wang, Y.; Holloway, J.; Krstic, M. Time-varying feedback for regulation of normal-form nonlinear systems in prescribed finite time. Automatica 2017, 83, 243–251. [Google Scholar] [CrossRef]
- Wang, Y.; Song, Y. A general approach to precise tracking of nonlinear systems subject to non-vanishing uncertainties. Automatica 2019, 106, 306–314. [Google Scholar] [CrossRef]
- Chang, L.; Han, Q.-L.; Ge, X.; Zhang, C.; Zhang, X. On designing distributed prescribed finite-time observers for strict-feedback nonlinear systems. IEEE Trans. Cybern. 2019, 51, 4695–4706. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, X.; Zhang, C.; Chang, L. A time-varying high-gain approach to feedback regulation of uncertain time-varying nonholonomic systems. ISA Trans. 2020, 98, 110–122. [Google Scholar] [CrossRef]
- Huang, J.; Wen, C.; Wang, W.; Song, Y.-D. Design of adaptive finite-time controllers for nonlinear uncertain systems based on given transient specifications. Automatica 2016, 69, 395–404. [Google Scholar] [CrossRef]
- Li, H.; Zhao, S.; He, W.; Lu, R. Adaptive finite-time tracking control of full state constrained nonlinear systems with dead-zone. Automatica 2019, 100, 99–107. [Google Scholar] [CrossRef]
- Li, K.; Tong, S. Fuzzy adaptive practical finite-time control for time delays nonlinear systems. Int. J. Fuzzy Syst. 2019, 21, 1013–1025. [Google Scholar] [CrossRef]
- Mao, J.; Huang, S.; Xiang, Z. Adaptive practical finite-time stabilization for switched nonlinear systems in pure-feedback form. J. Frankl. Inst. 2017, 354, 3971–3994. [Google Scholar] [CrossRef]
- Song, Y.; Huang, X.; Wen, C. Tracking control for a class of unknown nonsquare MIMO nonaffine systems: A deep-rooted information based robust adaptive approach. IEEE Trans. Autom. Control 2015, 61, 3227–3233. [Google Scholar] [CrossRef]
- Sun, Z.-Y.; Xue, L.-R.; Zhang, K. A new approach to finite-time adaptive stabilization of high-order uncertain nonlinear system. Automatica 2015, 58, 60–66. [Google Scholar] [CrossRef]
- Wang, F.; Chen, B.; Liu, X.; Lin, C. Finite-time adaptive fuzzy tracking control design for nonlinear systems. IEEE Trans. Fuzzy Syst. 2017, 26, 1207–1216. [Google Scholar] [CrossRef]
- Zhang, C.H.; Yang, G.H. Event-triggered practical finite-time output feedback stabilization of a class of uncertain nonlinear systems. Int. J. Robust Nonlinear Control 2019, 29, 3078–3092. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, Y. Fixed-time regulation control of uncertain nonholonomic systems and its applications. Int. J. Control 2017, 90, 1327–1344. [Google Scholar] [CrossRef]
- Yang, J.; Jie, W.U.; Yue, H.U. Backstepping method and its applications to nonlinear robust control. Control Decis. 2002, 17, 641–647. [Google Scholar]
- Zhao, K.; Song, Y.; Wang, Y. Regular error feedback based adaptive practical prescribed time tracking control of normal-form nonaffine systems. J. Frankl. Inst. 2019, 356, 2759–2779. [Google Scholar] [CrossRef]
- Bu, X.; He, G.; Wei, D. A new prescribed performance control approach for uncertain nonlinear dynamic systems via back-stepping. J. Frankl. Inst. 2018, 355, 8510–8536. [Google Scholar] [CrossRef]
- Abdellatif, W.S.; Hamada, A.; Abdelwahab, S.A.M. Wind speed estimation MPPT technique of DFIG-based wind turbines theoretical and experimental investigation. Electr. Eng. 2021, 103, 2769–2781. [Google Scholar] [CrossRef]
- Kamarudin, M.N.; Husain, A.R.; Ahmad, M.N. Control of uncertain nonlinear systems using mixed nonlinear damping function and backstepping techniques. In Proceedings of the 2012 IEEE International Conference on Control System, Computing and Engineering, Penang, Malaysia, 23–25 November 2012; pp. 105–109. [Google Scholar]
- Shanzhi, L.I.; Wang, H.; Tian, Y.; Aitouche, A. A RBF Neural Network based MPPT Method for Variable Speed Wind Turbine System—ScienceDirect. IFAC-PapersOnLine 2015, 48, 244–250. [Google Scholar]
- Gambhire, S.; Kishore, D.R.; Londhe, P.; Pawar, S. Review of sliding mode based control techniques for control system applications. Int. J. Dyn. Control 2021, 9, 363–378. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Description | Value |
|---|---|
| Rated Power | 5 MW |
| Rotor Radius | 63 m |
| Gear Box Ratio | 97 |
| Cut-in Wind Speed | 3 m/s |
| Cut-out Wind Speed | 25 m/s |
| Rated Speed | 1173.7 rpm |
| Rated Torque | 43.093 KN∙m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Qian, J.; Tian, D.; Zeng, Y.; Cao, F.; Li, L.; Zhang, G. Maximum Power Tracking Control of Wind Turbines Based on a New Prescribed Performance Function. Energies 2023, 16, 4022. https://doi.org/10.3390/en16104022
Li X, Qian J, Tian D, Zeng Y, Cao F, Li L, Zhang G. Maximum Power Tracking Control of Wind Turbines Based on a New Prescribed Performance Function. Energies. 2023; 16(10):4022. https://doi.org/10.3390/en16104022
Chicago/Turabian StyleLi, Xiang, Jing Qian, Danning Tian, Yun Zeng, Fei Cao, Lisheng Li, and Ganyuan Zhang. 2023. "Maximum Power Tracking Control of Wind Turbines Based on a New Prescribed Performance Function" Energies 16, no. 10: 4022. https://doi.org/10.3390/en16104022
APA StyleLi, X., Qian, J., Tian, D., Zeng, Y., Cao, F., Li, L., & Zhang, G. (2023). Maximum Power Tracking Control of Wind Turbines Based on a New Prescribed Performance Function. Energies, 16(10), 4022. https://doi.org/10.3390/en16104022