
Synchronizing Torque-Based Transient Stability Index of a Multimachine Interconnected Power System



Abstract
:1. Introduction
2. Background Theory
2.1. STC Matrix from Linearized Models of Multimachine Power System
| ith machine rotor angle | |
| adjacent machine rotor angle | |
| ith machine rotor speed in pu | |
| ith machine mechanical power input | |
| ith machine inertia constant | |
| is the per unit to radian conversion factor for the speed change. | |
| = are diagonal elements representing the total contribution of synchronizing torque from a machine to the network. | |
| = are off-diagonal elements representing the synchronizing torque interactions between the machines. | |
| = constant voltage behind transient reactance of the machine i | |
| diagonal element of the network’s short-circuit admittance matrix Y | |
| off-diagonal element of the network’s short-circuit admittance matrix Y |
2.2. Synchronizing Torque and System Stability
2.3. Transient Stability Analysis through CCT
3. Proposed Stability Index
3.1. Derivation and Explanation
3.2. Example: A Generalized Three-Machine Interconnected System Case
4. Results and Discussions
4.1. The WSCC 9-Bus Test System
4.2. The New England 68-Bus Test System
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| STC | Synchronizing Torque Coefficient |
| CCT | Critical Clearing Time |
| WSCC | Western System Coordinating Council |
| PSAT | Power System Analysis Toolbox |
| TEF | Transient Energy Function |
| EEAC | Extended Equal Area Criterion |
| SMIB | Single Machine Infinite Bus |
Appendix A. Details of Test Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load Bus Name | Active Power Demand (pu) | Reactive Power Demand (pu) |
|---|---|---|
| PL0 | QL0 | |
| Load 5 | 1.25 | 0.5 |
| Load 6 | 0.9 | 0.3 |
| Load 8 | 1 | 0.35 |
| Total | 3.15 | 1.15 |
| Load Bus | Active Power Demand (pu) | Reactive Power Demand (pu) | Load Bus | Active Power Demand (pu) | Reactive Power Demand (pu) |
|---|---|---|---|---|---|
| Name | PL0 | QL0 | Name | PL0 | QL0 |
| 17 | 60 | 3 | 45 | 2.08 | 0.21 |
| 18 | 24.7 | 1.23 | 46 | 1.507 | 0.285 |
| 20 | 6.8 | 1.03 | 47 | 2.031 | 0.3259 |
| 21 | 2.74 | 1.15 | 48 | 2.412 | 0.022 |
| 23 | 2.48 | 0.85 | 49 | 1.64 | 0.29 |
| 24 | 3.09 | −0.92 | 50 | 1 | −1.47 |
| 25 | 2.24 | 0.47 | 51 | 3.37 | −1.22 |
| 26 | 1.39 | 0.17 | 52 | 1.58 | 0.3 |
| 27 | 2.81 | 0.76 | 53 | 2.527 | 1.186 |
| 28 | 2.06 | 0.28 | 55 | 3.22 | 0.02 |
| 29 | 2.84 | 0.27 | 56 | 2 | 0.736 |
| 33 | 1.12 | 0 | 59 | 2.34 | 0.84 |
| 36 | 1.02 | −0.1946 | 60 | 2.088 | 0.708 |
| 39 | 2.67 | 0.126 | 61 | 1.04 | 1.25 |
| 40 | 0.6563 | 0.2353 | 64 | 0.09 | 0.88 |
| 41 | 10 | 2.5 | 67 | 3.2 | 1.53 |
| 42 | 11.5 | 2.5 | 68 | 3.29 | 0.32 |
| 44 | 2.675 | 0.0484 | |||
| continue | Total | 176.2063 | 19.718 |
References
- Haes Alhelou, H.; Hamedani-Golshan, M.E.; Njenda, T.C.; Siano, P. A survey on power system blackout and cascading events: Research motivations and challenges. Energies 2019, 12, 682. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.K.; Chang, S.M.; Hu, Y.L. Literature review of power system blackouts. Energy Procedia 2017, 141, 428–431. [Google Scholar] [CrossRef]
- Złotecka, D.; Sroka, K. The characteristics and main causes of power system failures basing on the analysis of previous blackouts in the world. In Proceedings of the 2018 International Interdisciplinary PhD Workshop (IIPhDW), Swinoujscie, Poland, 9–12 May 2018; pp. 257–262. [Google Scholar]
- Kundur, P.; Paserba, J.; Ajjarapu, V.; Andersson, G.; Bose, A.; Canizares, C.; Hatziargyriou, N.; Hill, D.; Stankovic, A.; Taylor, C.; et al. Definition and classification of power system stability IEEE/CIGRE joint task force on stability terms and definitions. IEEE Trans. Power Syst. 2004, 19, 1387–1401. [Google Scholar]
- Nagel, I.; Fabre, L.; Pastre, M.; ç ois Krummenacher, F.; Cherkaoui, R.; Kayal, M. High-speed power system transient stability simulation using highly dedicated hardware. IEEE Trans. Power Syst. 2013, 28, 4218–4227. [Google Scholar] [CrossRef]
- Fouad, A.A.; Vittal, V. Power System Transient Stability Analysis Using the Transient Energy Function Method; Prentice-Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Xue, Y.; Van Cutsem, T.; Ribbens-Pavella, M. A simple direct method for fast transient stability assessment of large power systems. IEEE Trans. Power Syst. 1988, 3, 400–412. [Google Scholar] [CrossRef]
- Xue, Y.; Van Custem, T.; Ribbens-Pavella, M. Extended equal area criterion justifications, generalizations, applications. IEEE Trans. Power Syst. 1989, 4, 44–52. [Google Scholar] [CrossRef]
- Vu, T.L.; Turitsyn, K. Lyapunov functions family approach to transient stability assessment. IEEE Trans. Power Syst. 2015, 31, 1269–1277. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Yu, J.; Zhang, W. Transient stability assessment using individual machine equal area criterion PART I: Unity principle. IEEE Access 2018, 6, 77065–77076. [Google Scholar] [CrossRef]
- Wang, S.; Yu, J.; Zhang, W. Transient stability assessment using individual machine equal area criterion part II: Stability margin. IEEE Access 2018, 6, 38693–38705. [Google Scholar] [CrossRef]
- Liu, C.; Sun, K.; Rather, Z.H.; Chen, Z.; Bak, C.L.; Thøgersen, P.; Lund, P. A systematic approach for dynamic security assessment and the corresponding preventive control scheme based on decision trees. IEEE Trans. Power Syst. 2013, 29, 717–730. [Google Scholar] [CrossRef]
- Yan, R.; Geng, G.; Jiang, Q.; Li, Y. Fast transient stability batch assessment using cascaded convolutional neural networks. IEEE Trans. Power Syst. 2019, 34, 2802–2813. [Google Scholar] [CrossRef]
- Kamwa, I.; Samantaray, S.; Joós, G. On the accuracy versus transparency trade-off of data-mining models for fast-response PMU-based catastrophe predictors. IEEE Trans. Smart Grid 2011, 3, 152–161. [Google Scholar] [CrossRef]
- Shaltout, A.; Al-Feilat, K.A. Damping and synchronizing torque computation in multimachine power systems. IEEE Trans. Power Syst. 1992, 7, 280–286. [Google Scholar] [CrossRef]
- Abu-Al-Feilat, E.; Bettayeb, M.; Al-Duwaish, H.; Abido, M.; Mantawy, A. A neural network-based approach for on-line dynamic stability assessment using synchronizing and damping torque coefficients. Electr. Power Syst. Res. 1996, 39, 103–110. [Google Scholar] [CrossRef]
- Kamari, N.A.M.; Musirin, I.; Othman, M.M. EP based optimization for estimating synchronizing and damping torque coefficients. Aust. J. Basic Appl. Sci. 2010, 4, 3741–3754. [Google Scholar]
- Mohamed Kamari, N.A.; Musirin, I.; Dagang, A.N.; Mohd Zaman, M.H. PSO-based oscillatory stability assessment by using the torque coefficients for SMIB. Energies 2020, 13, 1231. [Google Scholar] [CrossRef] [Green Version]
- Anderson, P.M.; Fouad, A.A. Power System Control and Stability; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Chow, J.H.; Sanchez-Gasca, J.J. Power System Modeling, Computation, and Control; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Vittal, V.; McCalley, J.D.; Anderson, P.M.; Fouad, A. Power System Control and Stability; John Wiley & Sons: Hoboken, NJ, USA, 2019. [Google Scholar]
- Bakhtvar, M.; Vittal, E.; Zheng, K.; Keane, A. Synchronizing torque impacts on rotor speed in power systems. IEEE Trans. Power Syst. 2016, 32, 1927–1935. [Google Scholar] [CrossRef] [Green Version]
- Sauer, P.W.; Pai, M.A.; Chow, J.H. Power System Dynamics and Stability: With Synchrophasor Measurement and Power System Toolbox; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Mithulananthan, N.; Canizares, C.A.; Reeve, J.; Rogers, G.J. Comparison of PSS, SVC, and STATCOM controllers for damping power system oscillations. IEEE Trans. Power Syst. 2003, 18, 786–792. [Google Scholar] [CrossRef]
- Roberts, L.G.; Champneys, A.R.; Bell, K.R.; di Bernardo, M. Analytical approximations of critical clearing time for parametric analysis of power system transient stability. IEEE J. Emerg. Sel. Top. Circuits Syst. 2015, 5, 465–476. [Google Scholar] [CrossRef] [Green Version]
- Sharma, S.; Pushpak, S.; Chinde, V.; Dobson, I. Sensitivity of transient stability critical clearing time. IEEE Trans. Power Syst. 2018, 33, 6476–6486. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.K.; Lee, T.C.; Hsieh, T.Y.; Lin, W.M. Impact on critical clearing time after integrating large-scale wind power into Taiwan power system. Sustain. Energy Technol. Assess. 2016, 16, 128–136. [Google Scholar] [CrossRef]
- WSCC 9-Bus System—Illinois Center for a Smarter Electric Grid (ICSEG). Available online: https://icseg.iti.illinois.edu/wscc-9-bus-system/ (accessed on 3 May 2022).
- New England 68-Bus Test System—Illinois Center for a Smarter Electric Grid (ICSEG). Available online: https://icseg.iti.illinois.edu/new-england-68-bus-test-system/ (accessed on 3 May 2022).
- Milano, F. An open source power system analysis toolbox. IEEE Trans. Power Syst. 2005, 20, 1199–1206. [Google Scholar] [CrossRef]
- Cañizares, C.A.; Mithulananthan, N.; Milano, F.; Reeve, J. Linear performance indices to predict oscillatory stability problems in power systems. IEEE Trans. Power Syst. 2004, 19, 1104–1114. [Google Scholar] [CrossRef]
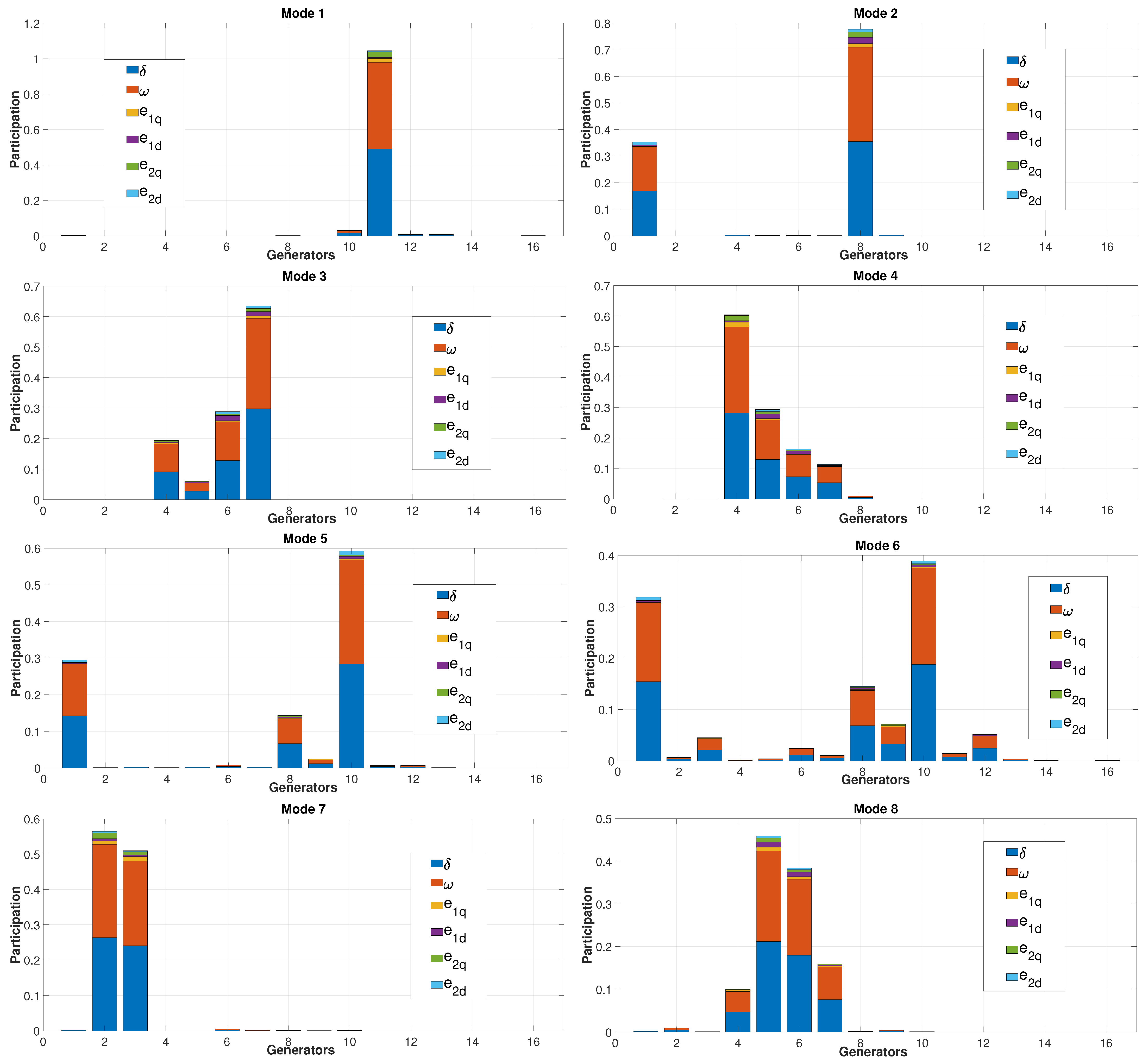

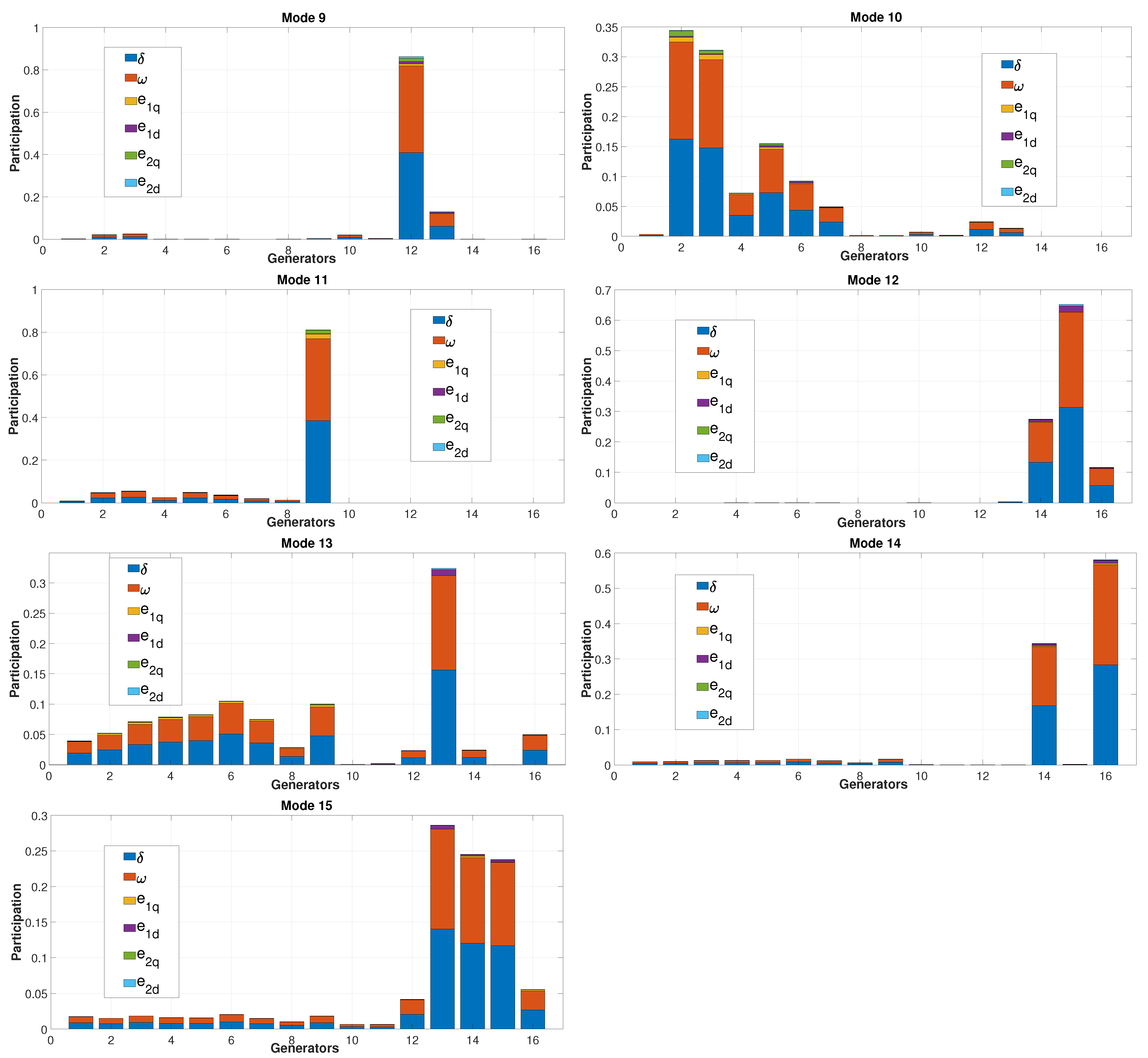
| Generators | Associated Electromechanical Modes |
|---|---|
| Mode 2, Mode 5, Mode 6, Mode 13 | |
| Mode 7, Mode 10, Mode 11, Mode 13 | |
| Mode 6, Mode 7, Mode 9, Mode 10, Mode 11, Mode 13 | |
| Mode 3, Mode 4, Mode 8, Mode 10, Mode 11, Mode 13 | |
| Mode 3, Mode 4, Mode 8, Mode 10, Mode 11, Mode 13 | |
| Mode 3, Mode 4, Mode 8, Mode 10, Mode 11, Mode 13 | |
| Mode 3, Mode 4, Mode 8, Mode 10, Mode 13 | |
| Mode 2, Mode 5, Mode 8, Mode 13 | |
| Mode 8, Mode 11, Mode 13 | |
| Mode 1, Mode 5, Mode 8 | |
| Mode 1, Mode 15 | |
| Mode 8, Mode 9, Mode 15 | |
| Mode 9, Mode 13, Mode 15 | |
| Mode 12,Mode 14, Mode 15 | |
| Mode 12, Mode 15 | |
| Mode 12, Mode 13, Mode 14, Mode 15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Poulose, A.; Kim, S. Synchronizing Torque-Based Transient Stability Index of a Multimachine Interconnected Power System. Energies 2022, 15, 3432. https://doi.org/10.3390/en15093432
Poulose A, Kim S. Synchronizing Torque-Based Transient Stability Index of a Multimachine Interconnected Power System. Energies. 2022; 15(9):3432. https://doi.org/10.3390/en15093432
Chicago/Turabian StylePoulose, Albert, and Soobae Kim. 2022. "Synchronizing Torque-Based Transient Stability Index of a Multimachine Interconnected Power System" Energies 15, no. 9: 3432. https://doi.org/10.3390/en15093432
APA StylePoulose, A., & Kim, S. (2022). Synchronizing Torque-Based Transient Stability Index of a Multimachine Interconnected Power System. Energies, 15(9), 3432. https://doi.org/10.3390/en15093432