
Transient Stability Analysis of a Multi-Machine Power System Integrated with Renewables


Abstract
:1. Introduction
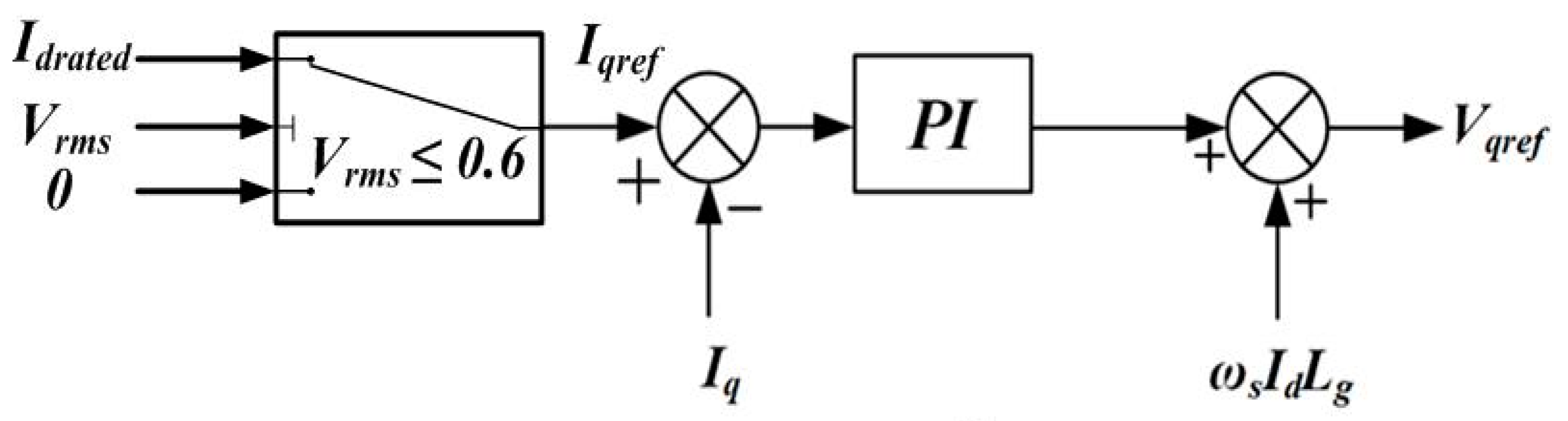
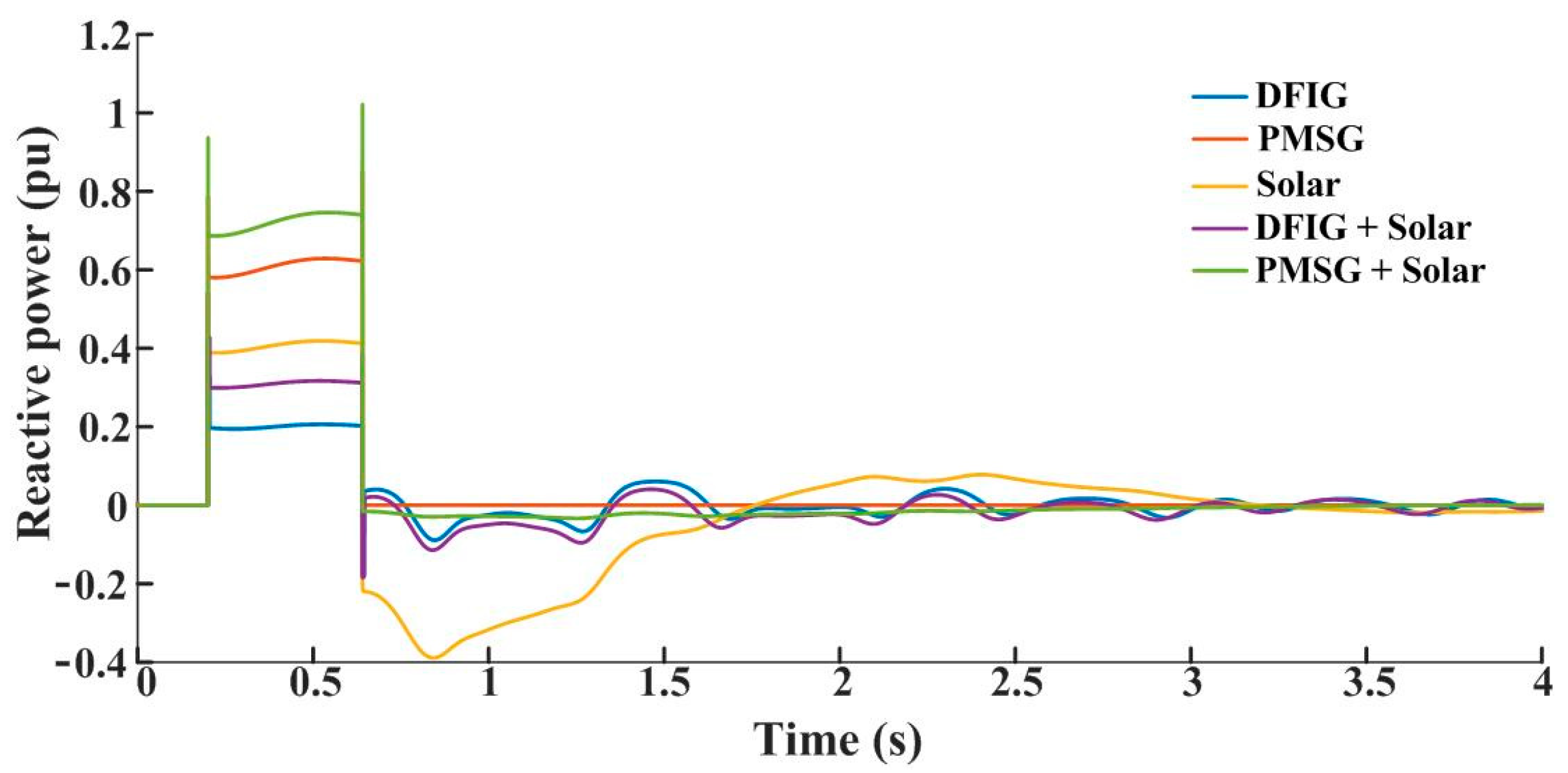
- Modifying the controllers of the converters such that all RES connected to the system will be injecting the maximum available reactive power into the grid during faults. Normally, the converters are configured to inject only real power into the grid (with unity power factor). The injection of reactive power during faults improves the bus voltage profile and hence enhances the overall stability of system.
- Performing a comparative analysis of critical clearing time for a MMS coupled with different renewable sources.
2. Mathematical Model of the System
2.1. Modelling of the Multi-Machine System
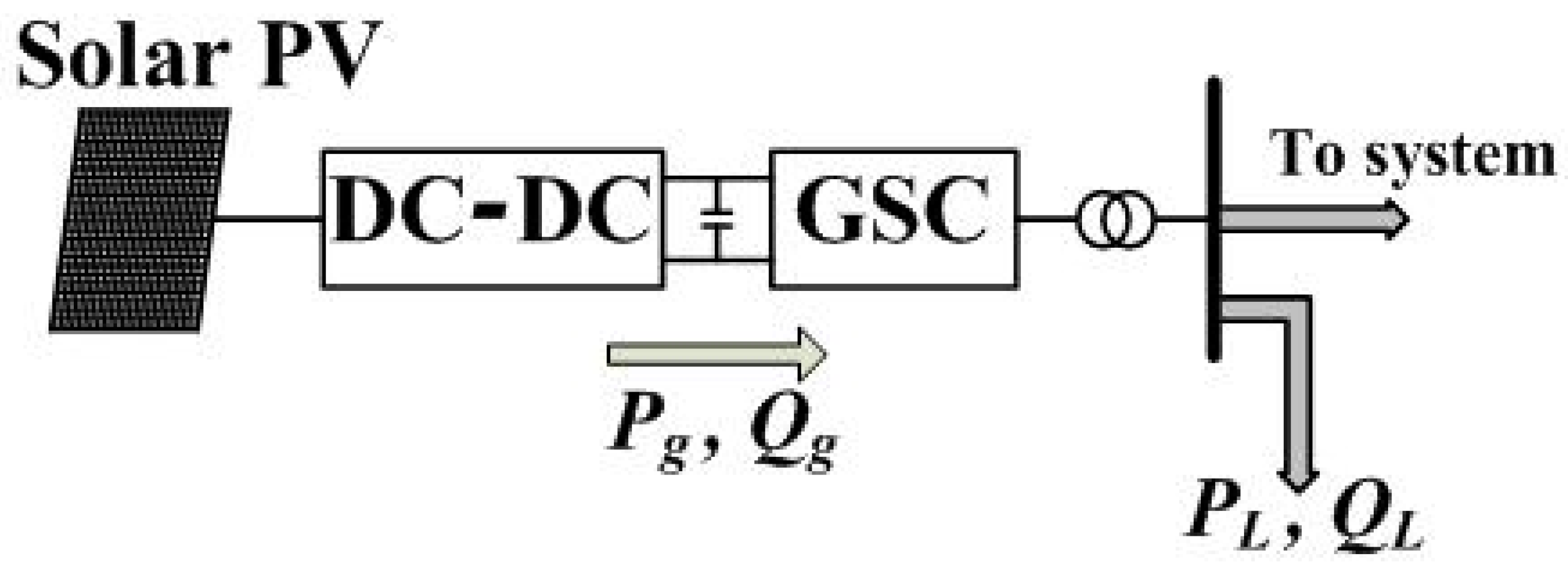
2.2. Modelling of Solar PV
2.3. Modelling of Turbine and Rotating Mass
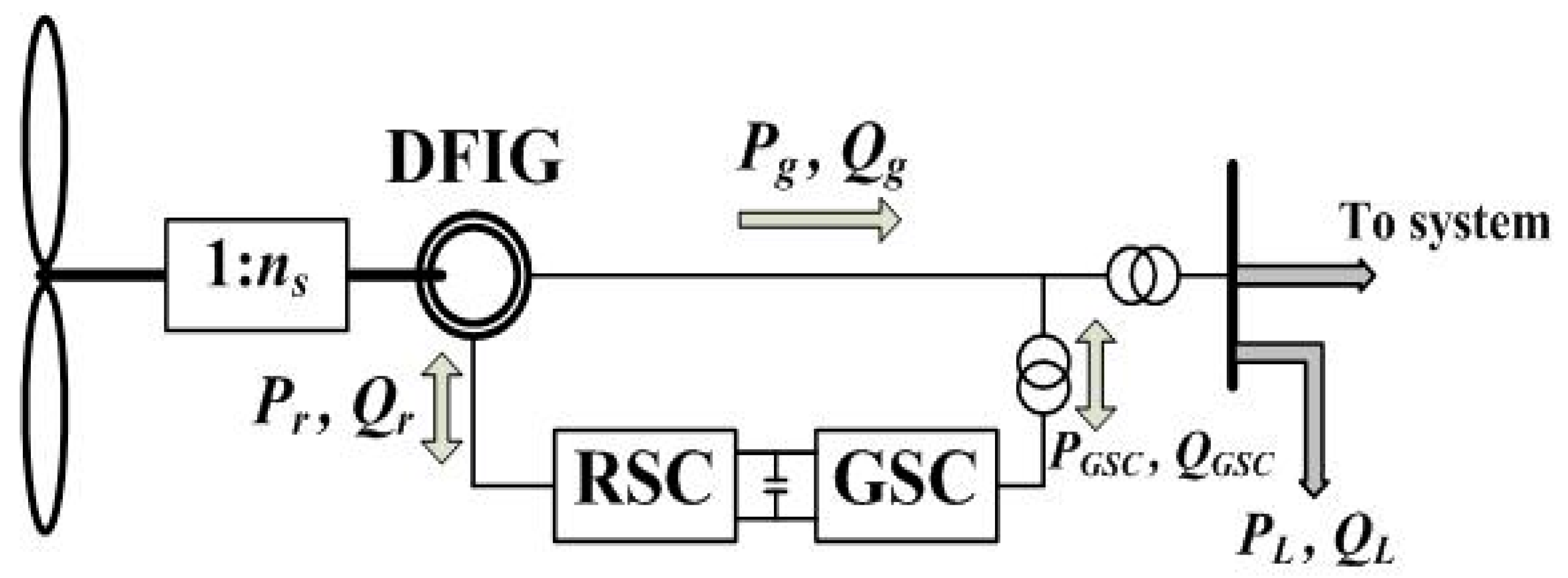
2.4. Modelling of the DFIG
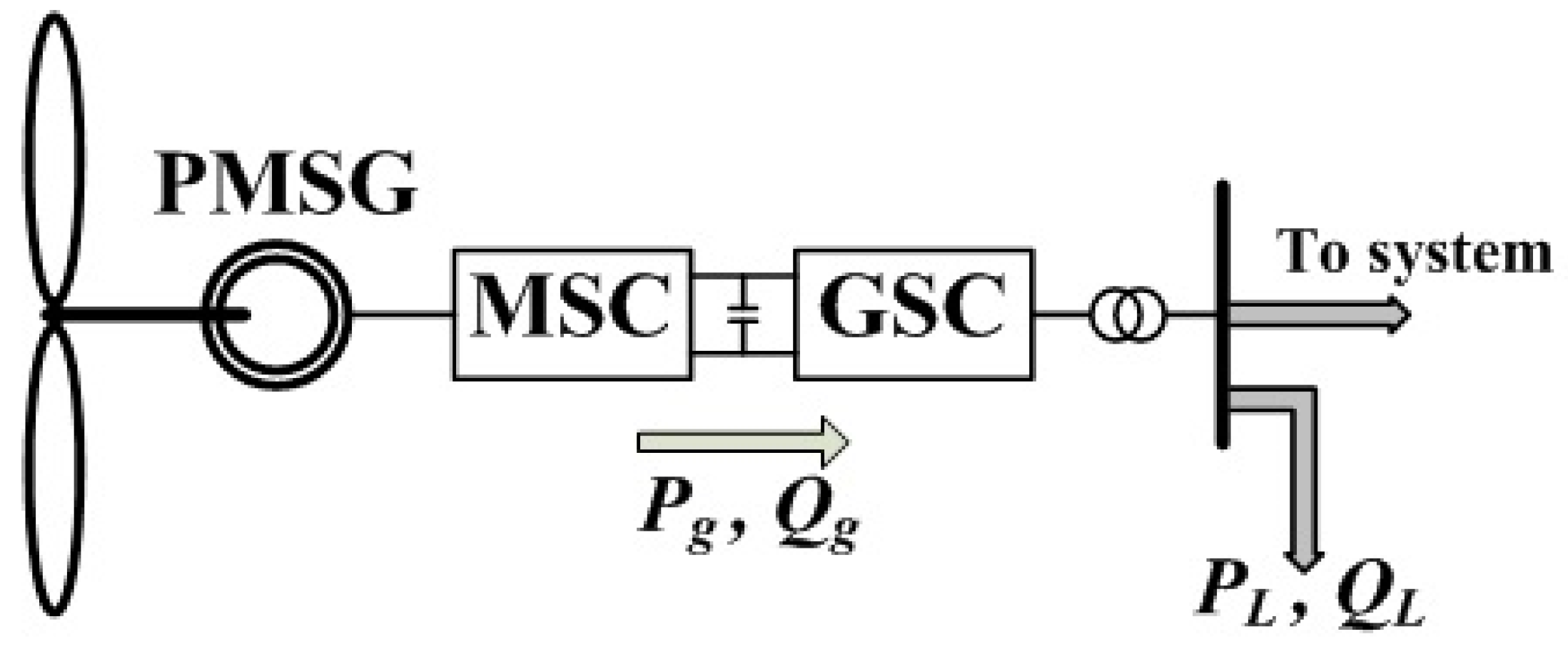
2.5. Modelling of the PMSG
2.6. Integration of RES with the Grid
3. Controllers of Renewable Energy Sources
3.1. Conventional Controllers in the DFIG
3.1.1. Controllers in the Rotor Side Converter (RSC)
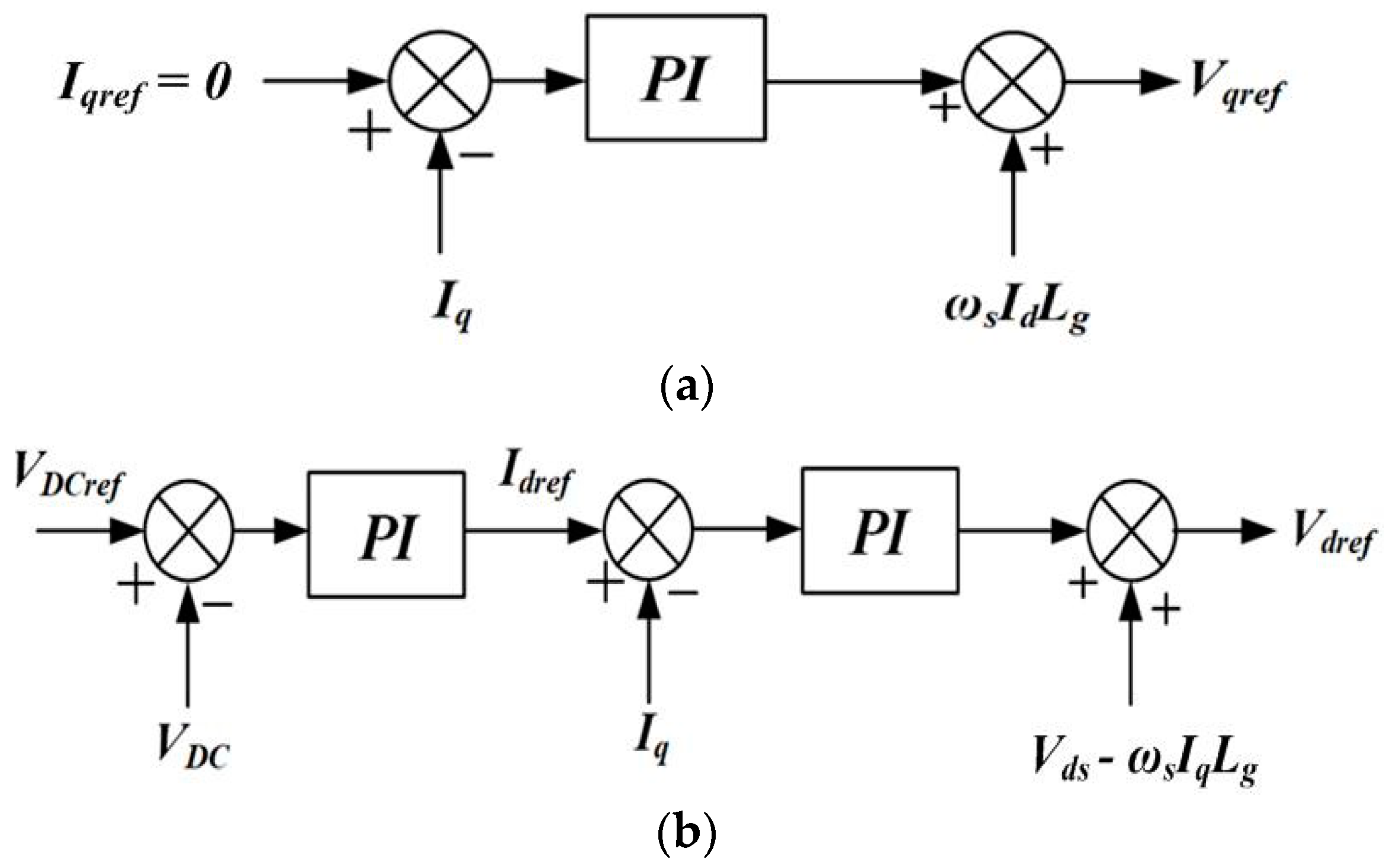
3.1.2. Controllers in the Grid-Side Converter (GSC)
3.2. Conventional Controllers in the PMSG
3.2.1. Controllers in the Machine Side Converter (MSC)
3.2.2. Controllers in the GSC
3.2.3. Pitch Angle Control
3.3. Conventional Controllers in Solar PVs
3.3.1. Controllers in the DC–DC Converter
3.3.2. Controllers in the VSC
3.4. Proposed Controllers
4. Analysis of System Results
4.1. WSCC 9-Bus Test System
4.1.1. 9-Bus Test System with Constant Power Injection
4.1.2. 9-Bus Test System with Variable Power Injection
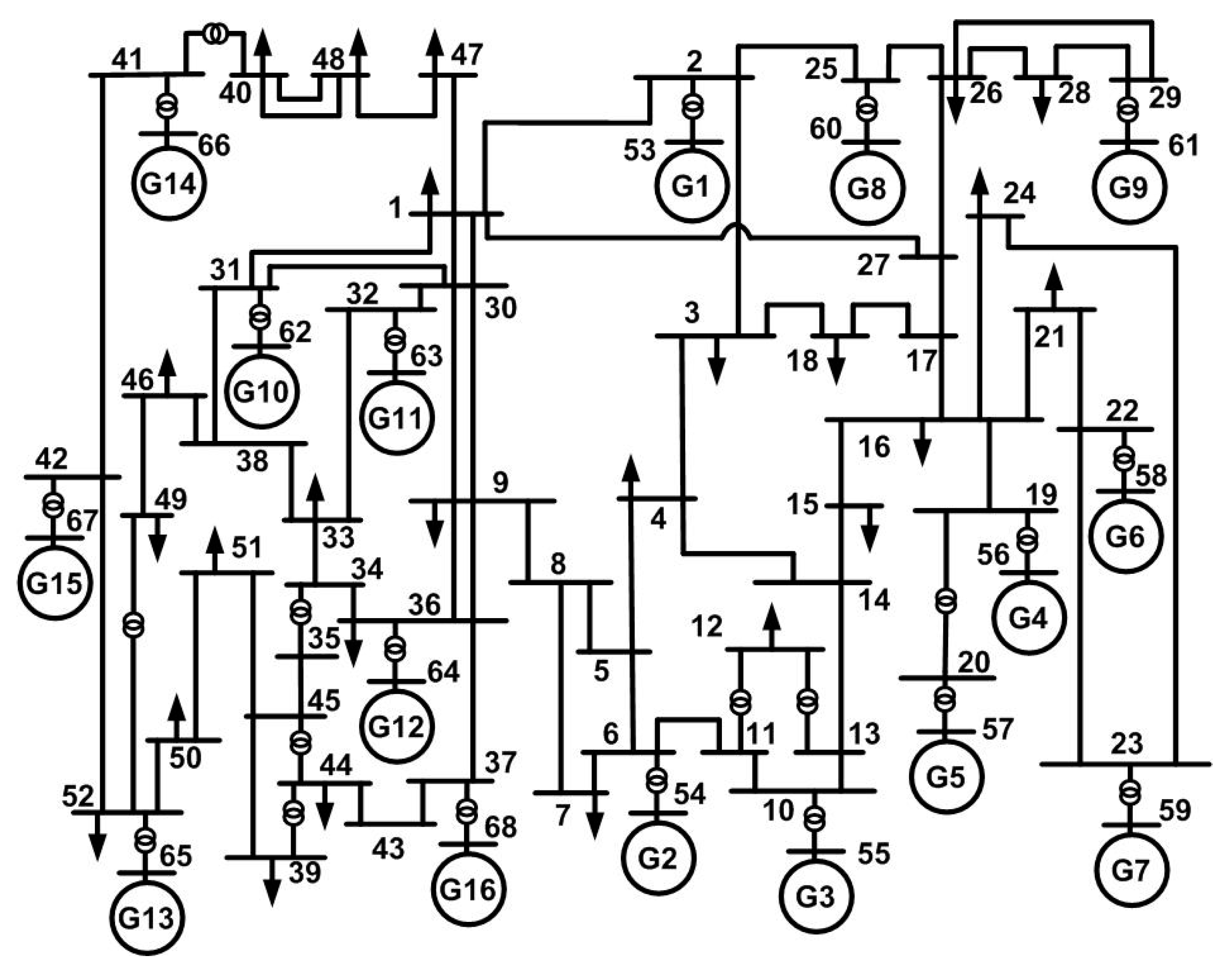
4.2. IEEE 68-Bus Test System
- Zone-I: {4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 54, 55}.
- Zone-II: {1, 2, 3, 17, 18, 25, 26, 27, 28, 29, 53, 60, 61}.
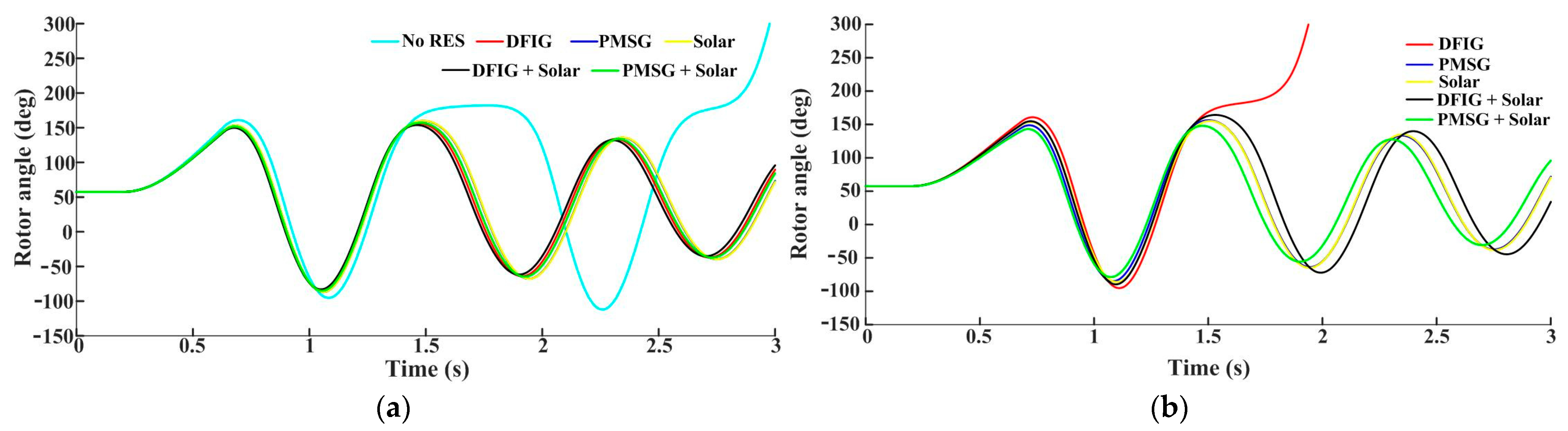
4.2.1. 68-Bus Test System with Constant Power Injection
4.2.2. 68-Bus Test System with Variable Power Injection
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kroposki, B.; Johnson, B.; Zhang, Y.; Gevorgian, V.; Denholm, P.; Hodge, B.-M.; Hannegan, B. Achieving a 100% renewable grid: Operating electric power systems with extremely high levels of variable renewable energy. IEEE Power Energy Mag. 2017, 15, 61–73. [Google Scholar] [CrossRef]
- Hansen, L.H.; Helle, L.; Blaabjerg, F.; Ritchie, E.; Munk-Nielsen, S.; Bindner, H.; Soerensen, P.; Bak-Jensen, B. Conceptual Survey of Generators and Power Electronics for Wind Turbines; Risø-R-1205; Risø National Laboratory: Roskilde, Denmark, 2001.
- Chakraborty, S.; Kramer, B.; Kroposki, B. A review of power electronics interfaces for distributed energy systems towards achieving low-cost modular design. Renew. Sustain. Energy Rev. 2009, 13, 2323–2335. [Google Scholar] [CrossRef]
- Du, E.; Zhang, N.; Kang, C.; Xia, Q. A High-efficiency network-constrained clustered unit commitment model for power system planning studies. IEEE Trans. Power Syst. 2019, 34, 2498–2508. [Google Scholar] [CrossRef]
- Hou, Q.; Du, E.; Zhang, N.; Kang, C. Impact of high renewable penetration on the power system operation mode: A data-driven approach. IEEE Trans. Power Syst. 2020, 35, 731–741. [Google Scholar] [CrossRef]
- Bekele, G.; Boneya, G. Design of a Photovoltaic-Wind Hybrid Power Generation System for Ethiopian Remote Area. Ph.D. Thesis, Addis Ababa University, Addis Ababa, Ethiopia, 2011. [Google Scholar]
- Patel, H.; Agarwal, V. Matlab based modeling to study the effect of partial shading on PV array characteristics. IEEE Trans. Energy Convers. 2008, 23, 302–310. [Google Scholar] [CrossRef]
- Abdulazeez, M.; Iskender, I. Simulation and Experimental Study of Shading Effect on Series and Parallel Connected PV Modules. In Proceedings of the 2011 7th International Conference on Electrical and Electronics Engineering, Bursa, Turkey, 1–4 December 2011. [Google Scholar]
- SiyuGuo, T.M.W.; Walsh, T.M. Analyzing Partial Shading of PV Module by Circuit Modeling. In Proceedings of the 2012 38th IEEE Photovoltaic Specialists Conference, Austin, TX, USA, 3–8 June 2012. [Google Scholar]
- Xuesong, Z.; Daichun, S.; Youjie, M.; Deshu, C. The Simulation and Design for MPPT of PV System Based on Incremental Conductance Method. In Proceedings of the 2010 WASE International Conference on Information Engineering, Beidai, China, 14–15 August 2010. [Google Scholar]
- Safari, A.; Mekhilef, S. Simulation and hardware implementation of incremental conductance MPPT with direct control method using cuk converter. IEEE Trans. Ind. Electron. 2011, 58, 1154–1161. [Google Scholar] [CrossRef]
- Rosu-Hamzescu, M.; Oprea, S. Practical Guide to Implementing Solar Panel MPPT Algorithm; Microchip Technology Inc.: Chandler, AZ, USA, 2013. [Google Scholar]
- Palmieri, A.; Rosini, A.; Procopio, R.; Bonfiglio, A. An MPC-sliding mode cascaded control architecture for PV grid-feeding inverters. Energies 2020, 13, 2326. [Google Scholar] [CrossRef]
- Feshara, H.F.; Ibrahim, A.M.; El-Amary, N.H.; Sharaf, S.M. Performance evaluation of variable structure controller based on sliding mode technique for a grid-connected solar network. IEEE Access 2019, 7, 84349–84359. [Google Scholar] [CrossRef]
- Taftichat, T.; Agbossou, K. Output power Maximization of a Permanent Magnet Synchronous Generator Based Stand-Alone Wind Turbine System. In Proceedings of the 2006 IEEE International Symposium on Industrial Electronics, Montreal, QC, Canada, 9–13 July 2006. [Google Scholar]
- Gules, R.; Pacheco, J.D.P.; Hey, H.L.; Imhoff, J. Maximum power point tracking system with Parallel connection for PV stand-alone application. IEEE Trans. Ind. Electron. 2008, 55, 2674–2683. [Google Scholar] [CrossRef] [Green Version]
- Rahmani, S.; Hamadi, A.; Ndtoungou, A.; Al-Haddad, K.; Kanaan, H.Y. Performance Evaluation of a PMSG-Based Variable Speed Wind Generation System Using Maximum Power Point Tracking. In Proceedings of the 2012 IEEE Electrical Power and Energy Conference, London, ON, Canada, 10–12 October 2012. [Google Scholar]
- Jamil, M.; Gupta, R.; Singh, M. A Review of Power Converter Topology Used with PMSG Based Wind Power Generation. In Proceedings of the 2012 IEEE 5th Power India Conference, Murthal, India, 19–22 December 2012. [Google Scholar]
- Koutroulis, E.; Kalaitzakis, K. Design of a maximum power tracking system for wind-energy conversion application. IEEE Trans. Ind. Electron. 2006, 53, 486–494. [Google Scholar] [CrossRef]
- Ahuja, H.; Bhuvaneswari, G.; Balasubramanian, R. Performance Comparison of DFIG and PMSG Based WECS. In Proceedings of the IET Conference on Renewable Power Generation (RPG 2011), Edinburgh, UK, 6–8 September 2011; pp. 1–6. [Google Scholar]
- Fandi, G.; Igbinovia, F.O.; Ahmad, I.; Svec, J.; Muller, Z. Modeling and Simulation of a Gearless Variable Speed Wind Turbine System With PMSG. In Proceedings of the 2017 IEEE PES PowerAfrica, Accra, Ghana, 27–30 June 2017; pp. 59–64. [Google Scholar]
- Wang, L.; Truong, D.-N. Stability enhancement of a power system with a PMSG-based and a DFIG-based offshore wind farm using a SVC with an adaptive-network-based fuzzy inference system. IEEE Trans. Ind. Electron. 2013, 60, 2799–2807. [Google Scholar] [CrossRef]
- Ngom, I.; Mboup, A.B.; Thiaw, L.; Mustapha, S.S.; Slama-Belkhodja, I. Improved Control for DC-Link Fluctuation during Voltage Dip Based on DFIG. In Proceedings of the 2018 9th International Renewable Energy Congress (IREC), Hammamet, Tunisia, 20–22 March 2018; pp. 1–6. [Google Scholar]
- Mitra, A.; Chatterjee, D. Active power control of DFIG-based wind farm for improvement of transient stability of power systems. IEEE Trans. Power Syst. 2016, 31, 82–93. [Google Scholar] [CrossRef]
- Mitra, A.; Chatterjee, D. A sensitivity-based approach to assess the impacts of integration of variable speed wind farms on the transient stability of power systems. Renew. Energy 2013, 60, 662–671. [Google Scholar] [CrossRef]
- Zhou, T.; Francois, B. Energy management and power control of a hybrid active wind generator for distributed power generation and grid integration. IEEE Trans. Ind. Electron. 2011, 58, 95–104. [Google Scholar] [CrossRef]
- Ropp, M.; Gonzalez, S. Development of a MATLAB/simulink model of a single-phase grid-connected photovoltaic system. IEEE Trans. Energy Convers. 2009, 24, 195–202. [Google Scholar] [CrossRef]
- Ku, T.-T.; Lin, C.-H.; Hsu, C.-T.; Chen, C.-S.; Liao, Z.-Y.; Wang, S.-D.; Chen, F.-F. Enhancement of power system operation by renewable ancillary service. IEEE Trans. Ind. Appl. 2020, 56, 6150–6157. [Google Scholar] [CrossRef]
- Hirose, T.; Matsuo, H. Standalone hybrid wind-solar power generation system applying dump power control without dump load. IEEE Trans. Ind. Electron. 2012, 59, 988–997. [Google Scholar] [CrossRef]
- Sowa, P.; Zychma, D. Dynamic equivalents in power system studies: A review. Energies 2022, 15, 1396. [Google Scholar] [CrossRef]
- Olulope, P.K.; Folly, K.A.; Venayagamoorthy, G.K. Modeling and Simulation of Hybrid Distributed Generation and Its Impact on Transient Stability of Power System. In Proceedings of the 2013 IEEE International Conference on Industrial Technology (ICIT), Cape Town, South Africa, 25–28 February 2013; pp. 1757–1762. [Google Scholar]
- Ghanasyam, P.; Verma, A.; Mitra, A. Impact of Hybrid Renewable Sources on the Transient Stability of Multi-Machine Power System. In Proceedings of the IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Chennai, India, 18–21 December 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Machowski, J.; Lubosny, Z.; Bialek, J.W.; Bumby, J.R. Power System Dynamics: Stability and Control; John Wiley & Sons: New York, NY, USA, 2020. [Google Scholar]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Pal, B.; Mei, F. Modelling adequacy of the doubly fed induction generator for small-signal stability studies in power systems. IET Renew. Power Gener. 2008, 2, 181–190. [Google Scholar] [CrossRef]
- Yang, S.; Zhang, L. Modeling and Control of the PMSG Wind Generation System with a Novel Controller. In Proceedings of the 2013 Third International Conference on Intelligent System Design and Engineering Applications, Hong Kong, China, 16–18 January 2013; pp. 946–949. [Google Scholar]
- Kurian, S.; Sindhu, T.K.; Cheriyan, E.P. Modelling and Simulation of Direct Driven Wind Electric Generator for Grid Integration. In Proceedings of the 2012 Annual IEEE India Conference (INDICON), Kochi, India, 7–9 December 2012; pp. 171–174. [Google Scholar]
- Mai, T.; Hand, M.M.; Baldwin, S.F.; Wiser, R.H.; Brinkman, G.L.; Denholm, P.; Arent, D.J.; Porro, G.; Sandor, D.; Hostick, D.J.; et al. Renewable electricity futures for the United States. IEEE Trans. Sustain. Energy 2014, 5, 372–378. [Google Scholar] [CrossRef]
- Hashimoto, J.; Ustun, T.S.; Suzuki, M.; Sugahara, S.; Hasegawa, M.; Otani, K. Advanced grid integration test platform for increased distributed renewable energy penetration in smart grids. IEEE Access 2021, 9, 34040–34053. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of RES Connected | CCT of δ21 in ms | ||
|---|---|---|---|
| Conventional Control | Proposed Control | Improvement | |
| No RES 1 | 430 | ||
| DFIG | 463 | 483 | 20 |
| PMSG | 453 | 533 | 80 |
| Solar PV | 458 | 544 | 86 |
| DFIG and Solar PV | 465 | 500 | 35 |
| PMSG and Solar PV | 452 | 551 | 99 |
| Type of RES Connected | Fault Instants | CCT of δ21 in ms | ||
|---|---|---|---|---|
| Conventional Control | Proposed Control | Improvement | ||
| DFIG | A | 454 | 472 | 18 |
| B | 468 | 489 | 21 | |
| C | 464 | 484 | 20 | |
| D | 456 | 474 | 18 | |
| PMSG | A | 453 | 533 | 80 |
| B | 453 | 533 | 80 | |
| C | 453 | 533 | 80 | |
| D | 453 | 533 | 80 | |
| Solar PV | A | 455 | 551 | 96 |
| B | 456 | 552 | 96 | |
| C | 460 | 560 | 100 | |
| D | 462 | 565 | 103 | |
| DFIG and Solar PV | A | 460 | 495 | 35 |
| B | 475 | 516 | 41 | |
| C | 473 | 512 | 39 | |
| D | 464 | 499 | 35 | |
| PMSG and Solar PV | A | 459 | 586 | 127 |
| B | 459 | 585 | 126 | |
| C | 460 | 588 | 128 | |
| D | 461 | 589 | 128 | |
| Type of RES Connected at Bus 28 | CCT in ms Fault at Bus 53 | ||
|---|---|---|---|
| Conventional Control | Proposed Control | Improvement | |
| No RES | 664 | ||
| DFIG | 676 | 713 | 37 |
| PMSG | 686 | 723 | 37 |
| Solar PV | 676 | 723 | 47 |
| DFIG and Solar PV | 677 | 730 | 53 |
| PMSG and Solar PV | 684 | 751 | 67 |
| Type of RES Connected | Zone (RES at Bus) | Fault Instants | Fault Bus | CCT of in ms | ||
|---|---|---|---|---|---|---|
| Conventional Control | Proposed Control | Improvement | ||||
| PMSG and Solar PV | I (4) | A | 12 | 657 | 692 | 35 |
| B | 12 | 656 | 691 | 35 | ||
| C | 12 | 657 | 691 | 34 | ||
| D | 12 | 657 | 691 | 34 | ||
| II (28) | A | 26 | 332 | 336 | 4 | |
| 53 | 685 | 745 | 60 | |||
| B | 26 | 331 | 335 | 4 | ||
| 53 | 684 | 743 | 59 | |||
| C | 26 | 331 | 335 | 4 | ||
| 53 | 684 | 752 | 68 | |||
| D | 26 | 331 | 335 | 4 | ||
| 53 | 684 | 752 | 68 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Agarala, A.; Bhat, S.S.; Mitra, A.; Zychma, D.; Sowa, P. Transient Stability Analysis of a Multi-Machine Power System Integrated with Renewables. Energies 2022, 15, 4824. https://doi.org/10.3390/en15134824
Agarala A, Bhat SS, Mitra A, Zychma D, Sowa P. Transient Stability Analysis of a Multi-Machine Power System Integrated with Renewables. Energies. 2022; 15(13):4824. https://doi.org/10.3390/en15134824
Chicago/Turabian StyleAgarala, Ajaysekhar, Sunil S. Bhat, Arghya Mitra, Daria Zychma, and Pawel Sowa. 2022. "Transient Stability Analysis of a Multi-Machine Power System Integrated with Renewables" Energies 15, no. 13: 4824. https://doi.org/10.3390/en15134824
APA StyleAgarala, A., Bhat, S. S., Mitra, A., Zychma, D., & Sowa, P. (2022). Transient Stability Analysis of a Multi-Machine Power System Integrated with Renewables. Energies, 15(13), 4824. https://doi.org/10.3390/en15134824