
A Novel TSA-PSO Based Hybrid Algorithm for GMPP Tracking under Partial Shading Conditions

 , , ,
, , ,  ,
,  and
and 
Abstract
:1. Introduction
- The suggested TSA-PSO can be implemented for the PV system under different weather conditions.
- The proposed TSA-PSO can address the issues related to previously implemented metaheuristics techniques such as slow convergence, slow settling time, and abrupt oscillation behavior. It also evades the local maxima. In addition, complex partial shading is successfully addressed by the proposed TSA-PSO method.
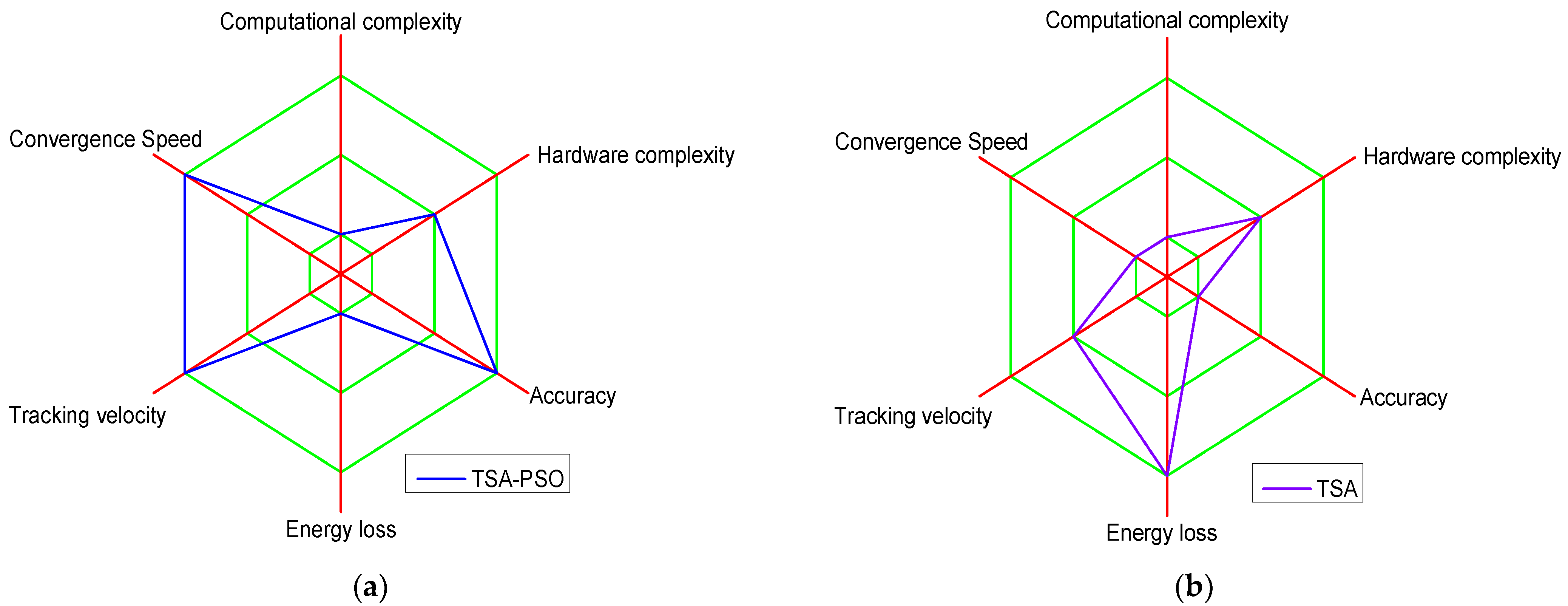
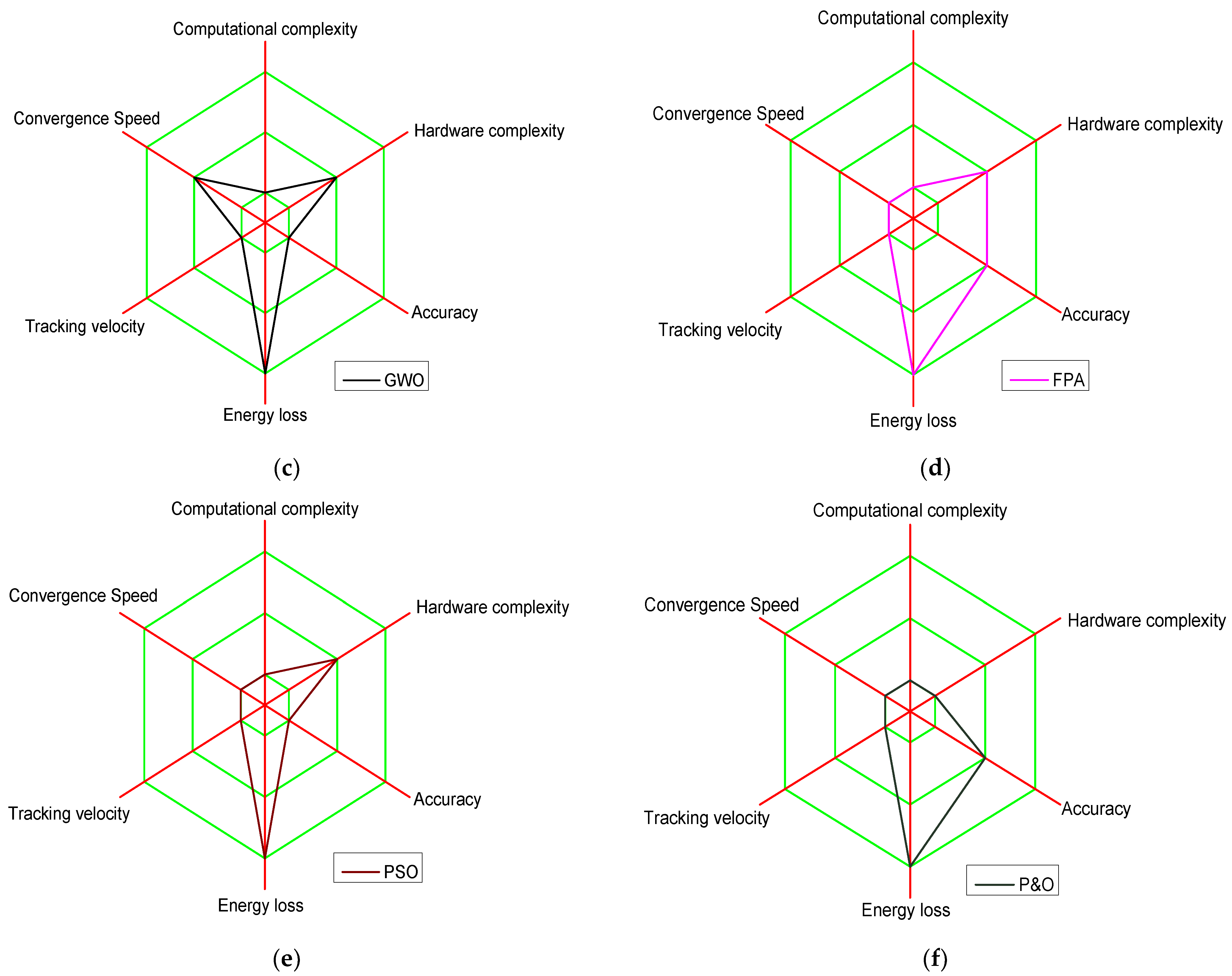
- The effectiveness of the suggested technique was demonstrated experimentally under various partial shading patterns; it was compared to the FPA, GWO, PSO, TSA, and P&O algorithms, which were all executed in the same circuit circumstances and evaluated under identical environments.
2. Recently Published Metaheuristics-Based GMPPT Algorithms
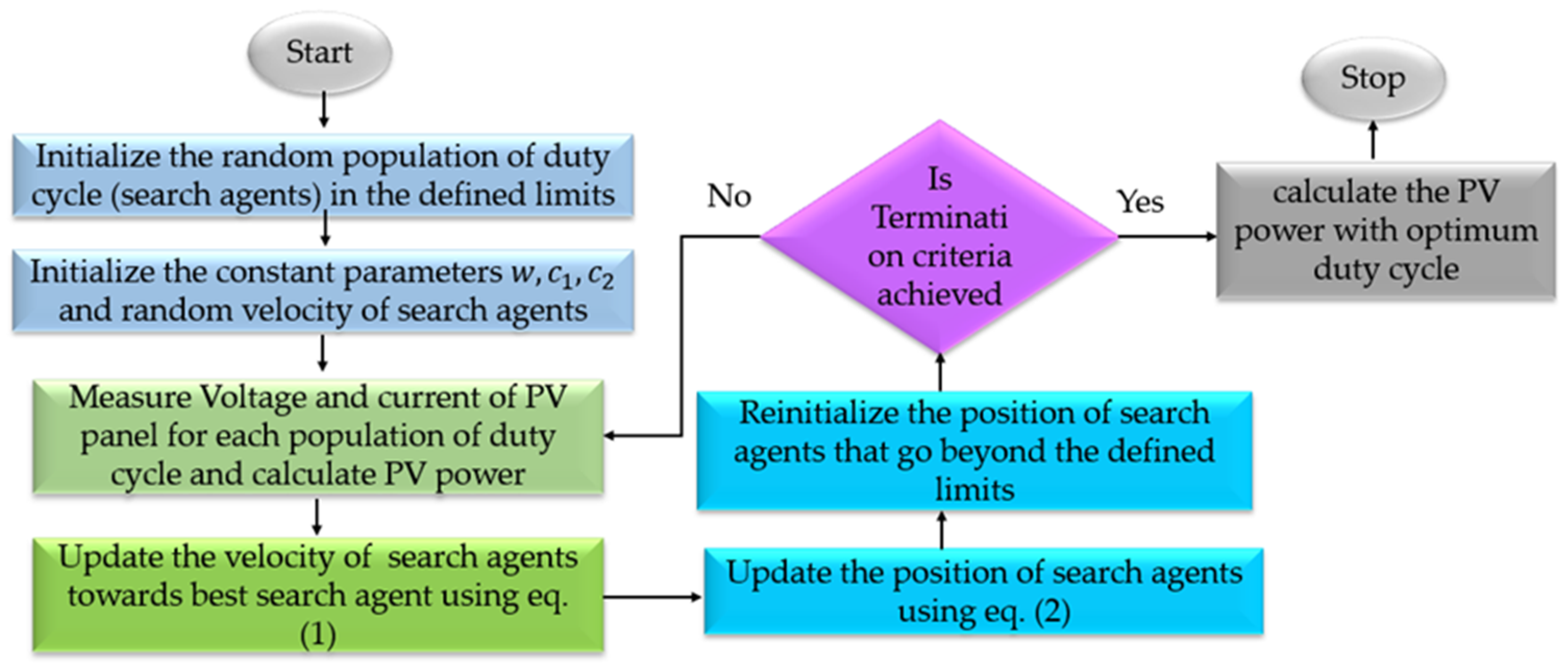
2.1. Particle Swarm Optimization (PSO)
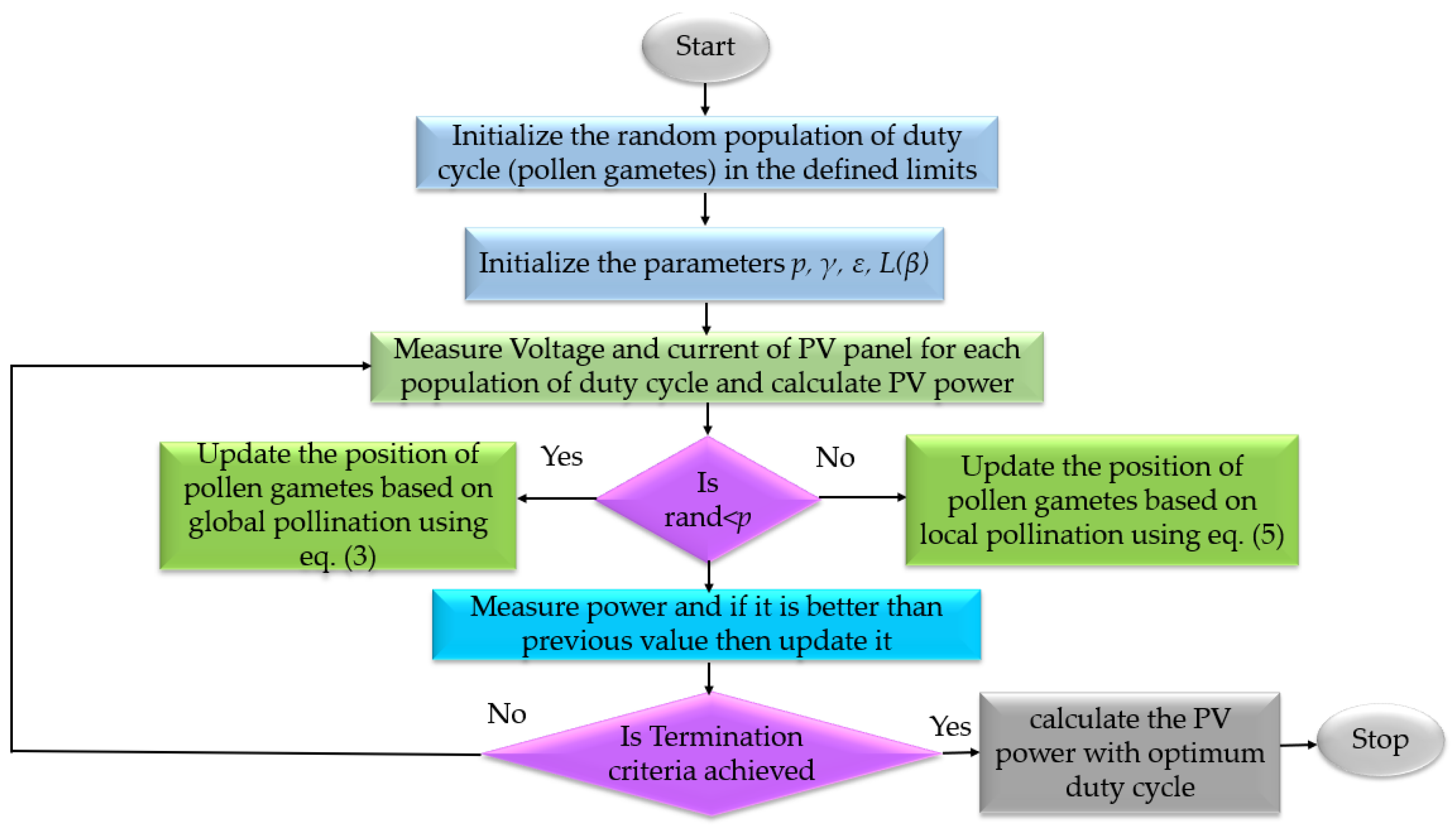
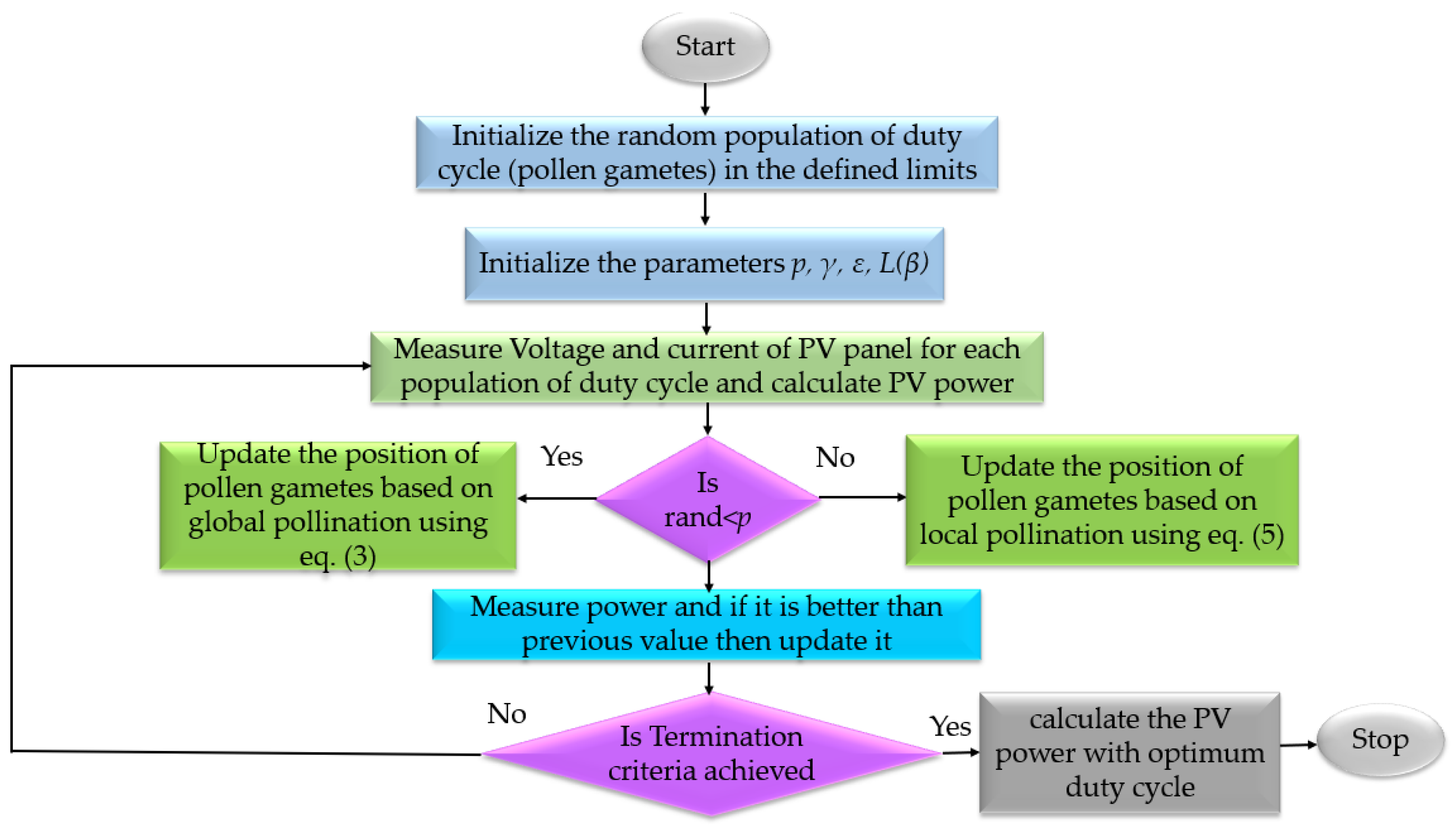
2.2. Flower Pollination Algorithm
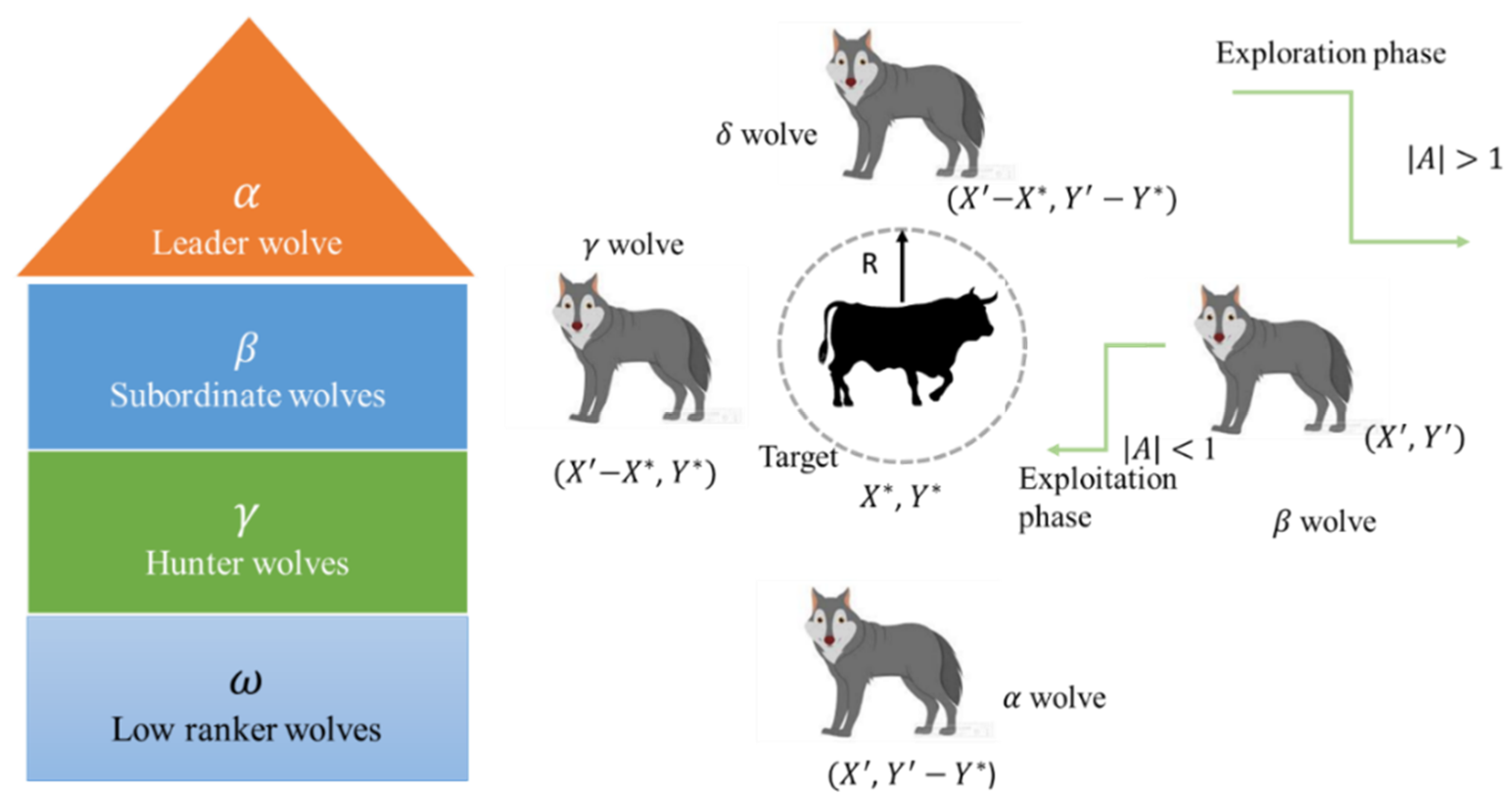
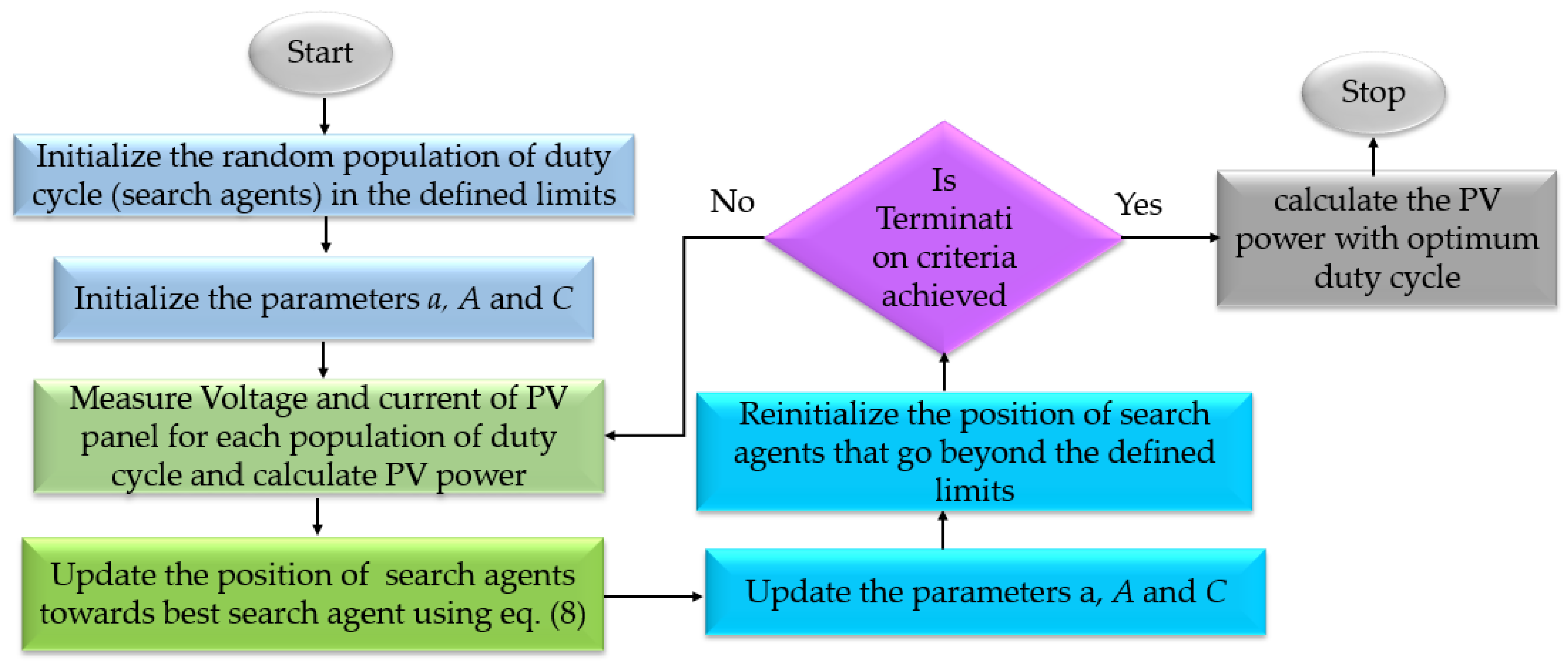
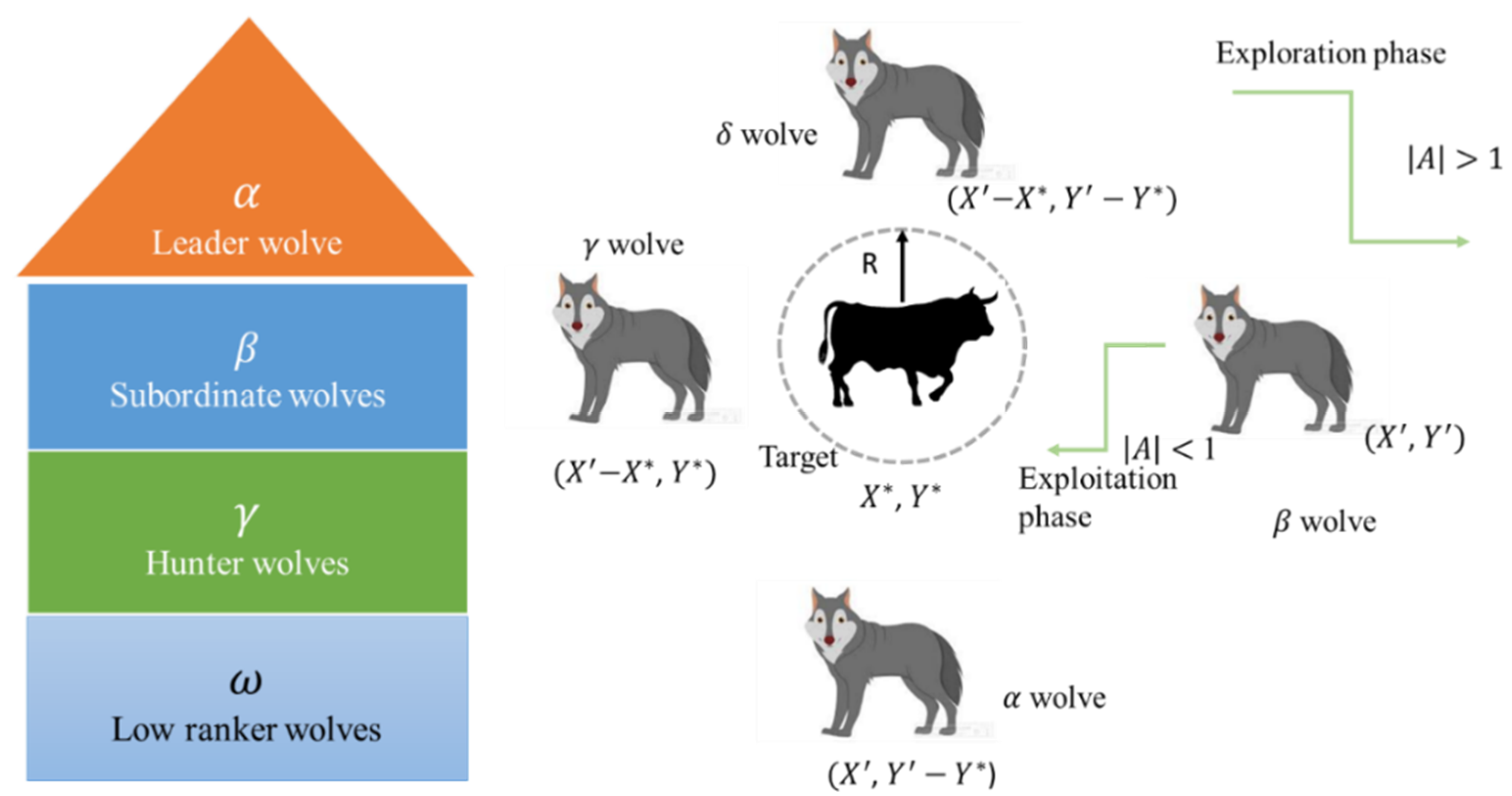
2.3. Grey Wolf Optimization
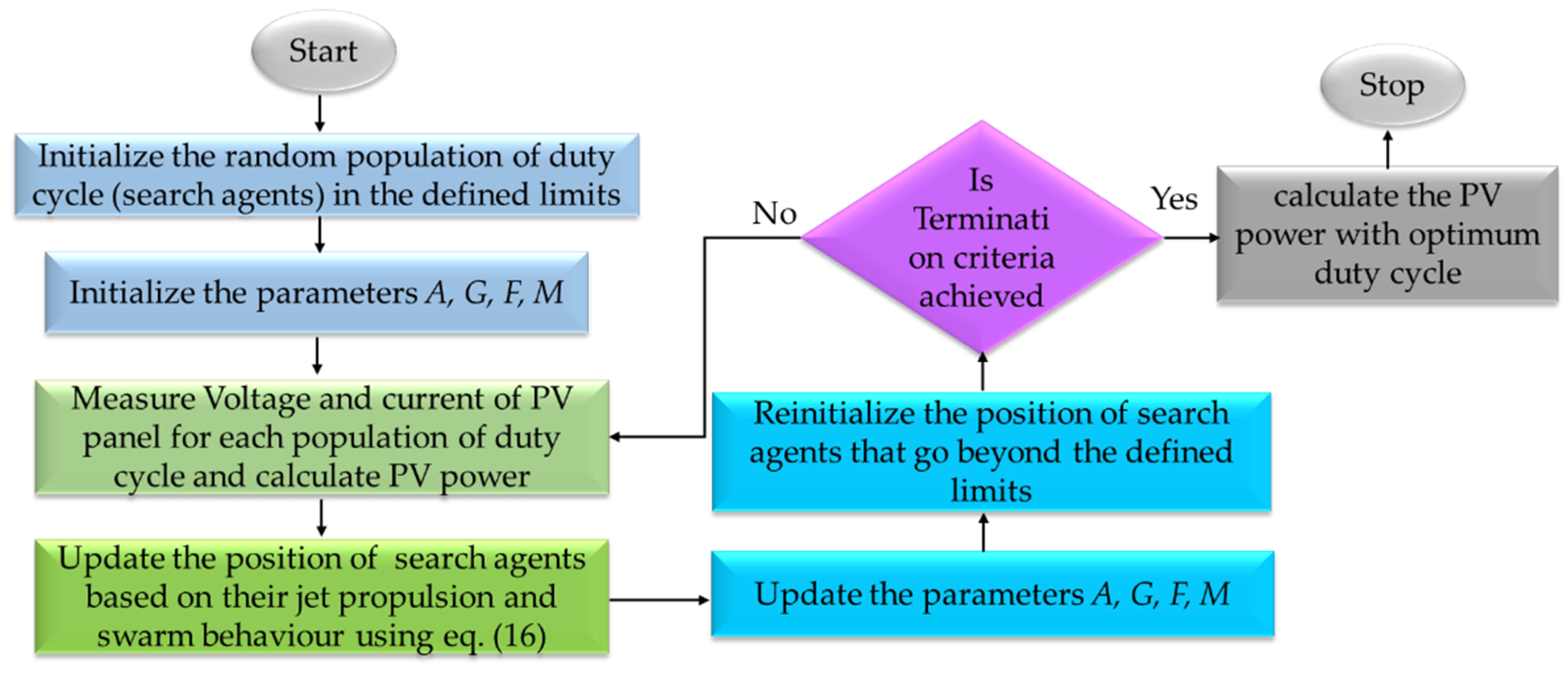
2.4. Tunicate Swarm Optimization
2.4.1. Prevent Collisions between Candidate Solutions
2.4.2. Step More toward the Location of the Best Solution
2.4.3. Stick Close to the Best Solution
2.5. Perturb and Observe
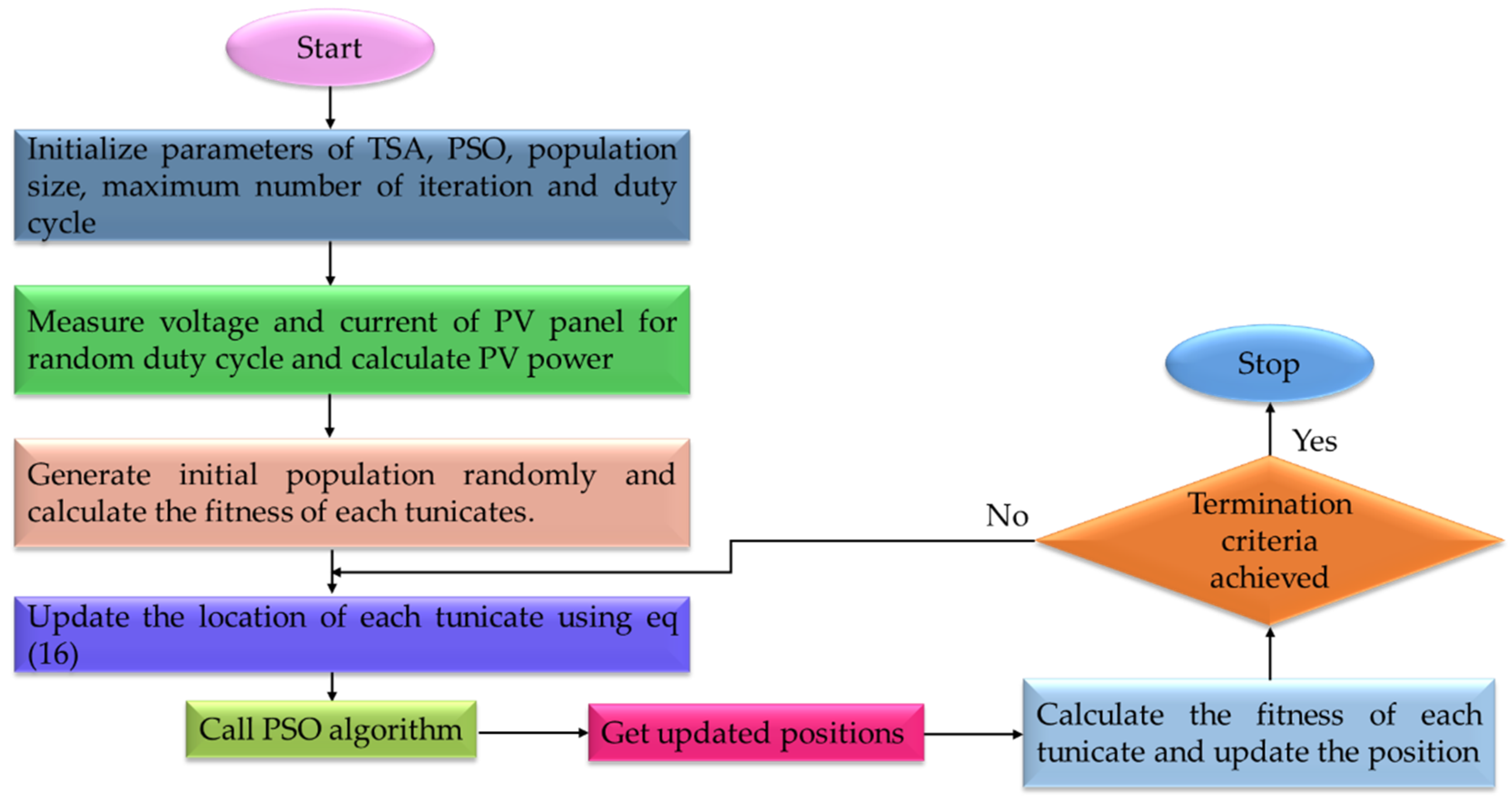
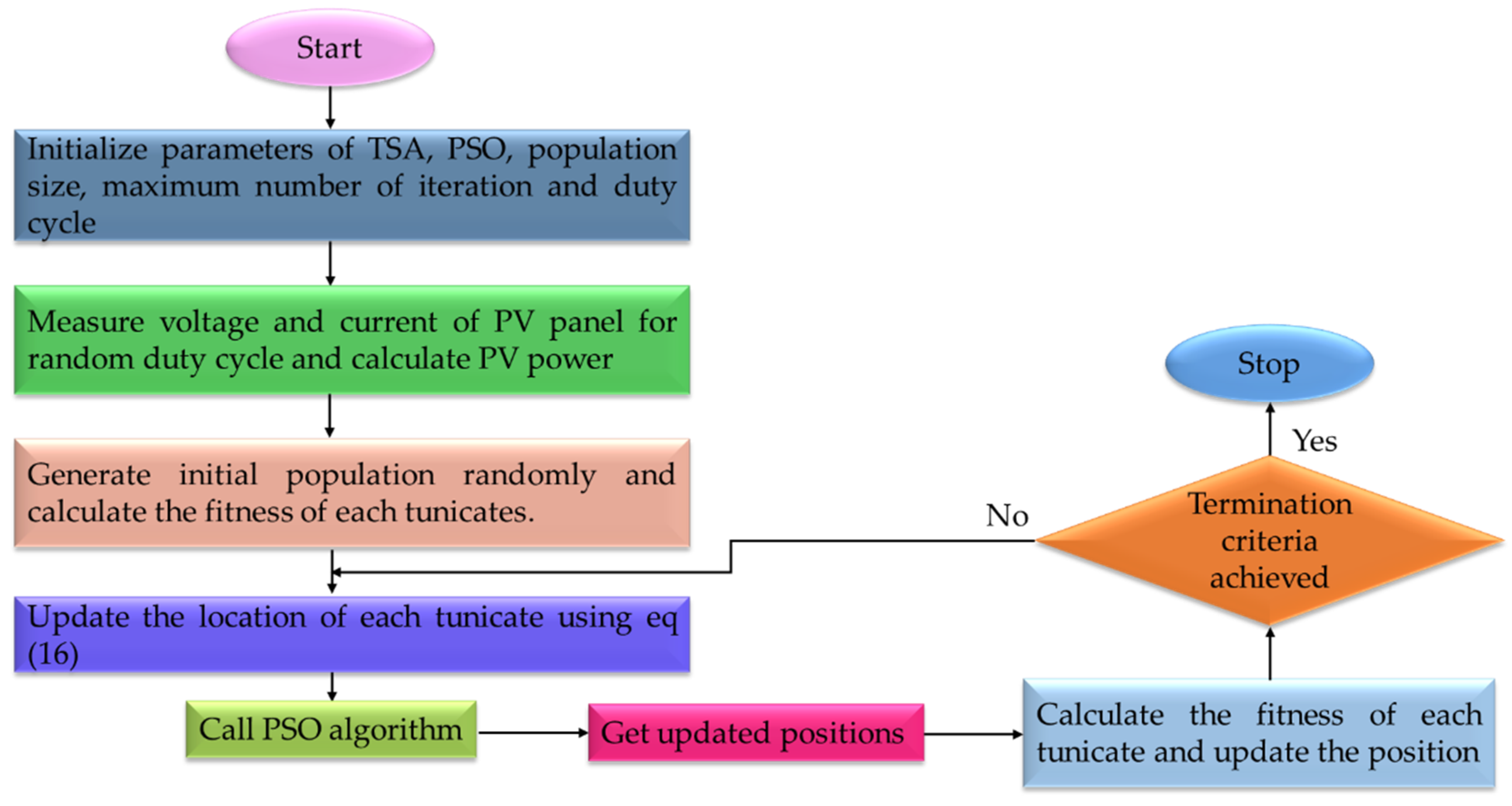
3. Proposed TSA-PSO-Based GMPPT Algorithm
| Algorithm 1 TSA-PSO | |
| Stage1. Initialize the tunicates’ locations on stabilized locations with equal space to reside between 10% and 90% of the duty ratio. | |
| Stage2. Initiate the converter and observe the output power “P” of the PV array at each tunicate location. | |
| Stage 3. Make the adjustment for each duty as follows: | |
| where is the current value of the duty, is the number of iterations, and represents the coefficient. | |
| Stage 4. Repeat Stages 3 and 4 until all the tunicates converge to the MPP. | |
| Stage 5. Begin the PSO loop after retrieving the MPP to track the maximum power (GMPP). Choose a small step size to mitigate oscillations in PV output power and to improve tracking performance. | |
| Stage 6. Repeat these stages until the stopping point is met. | |
4. Experimental Setup
5. Experimental Results and Discussion
5.1. Problem Formulation
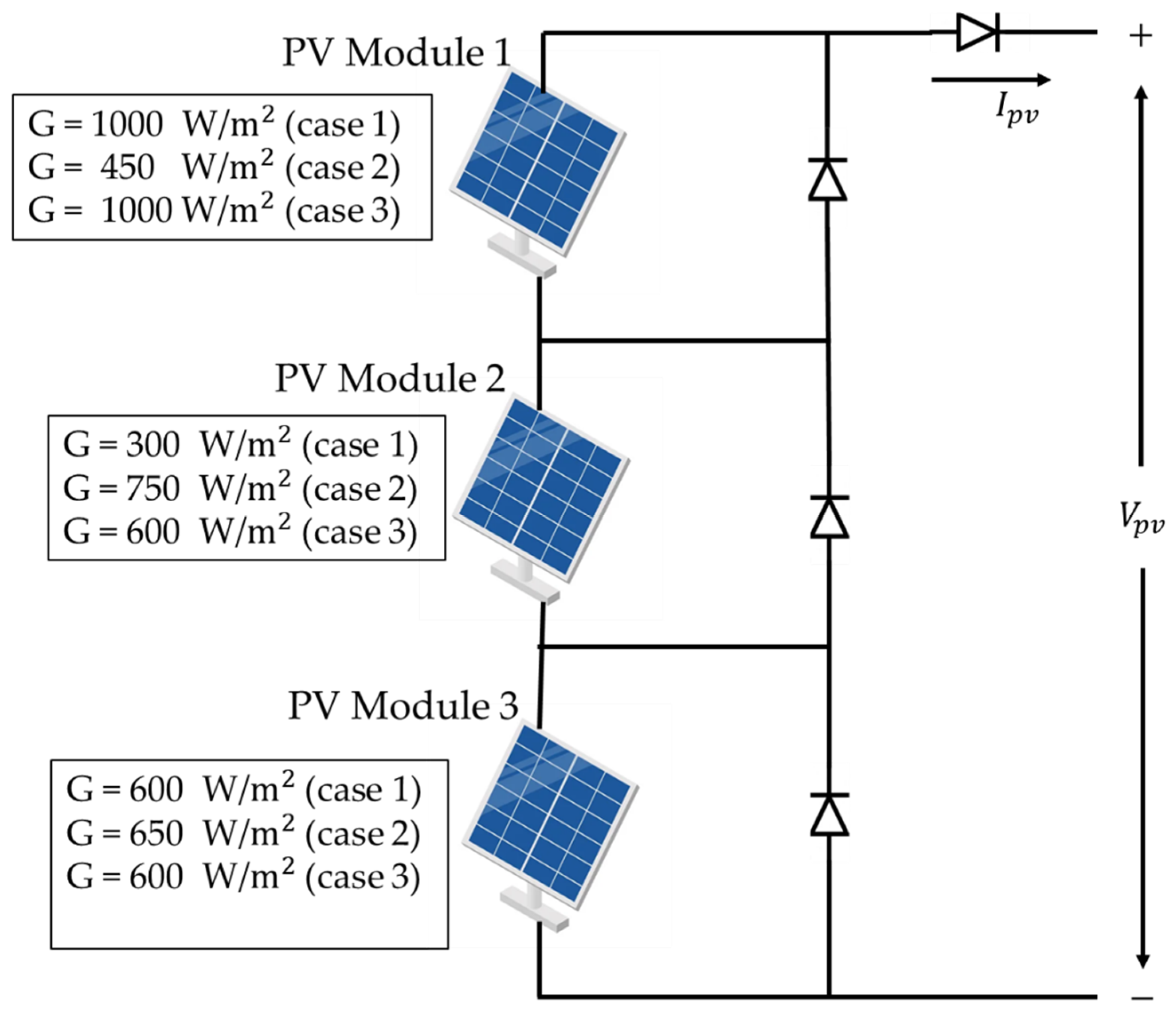
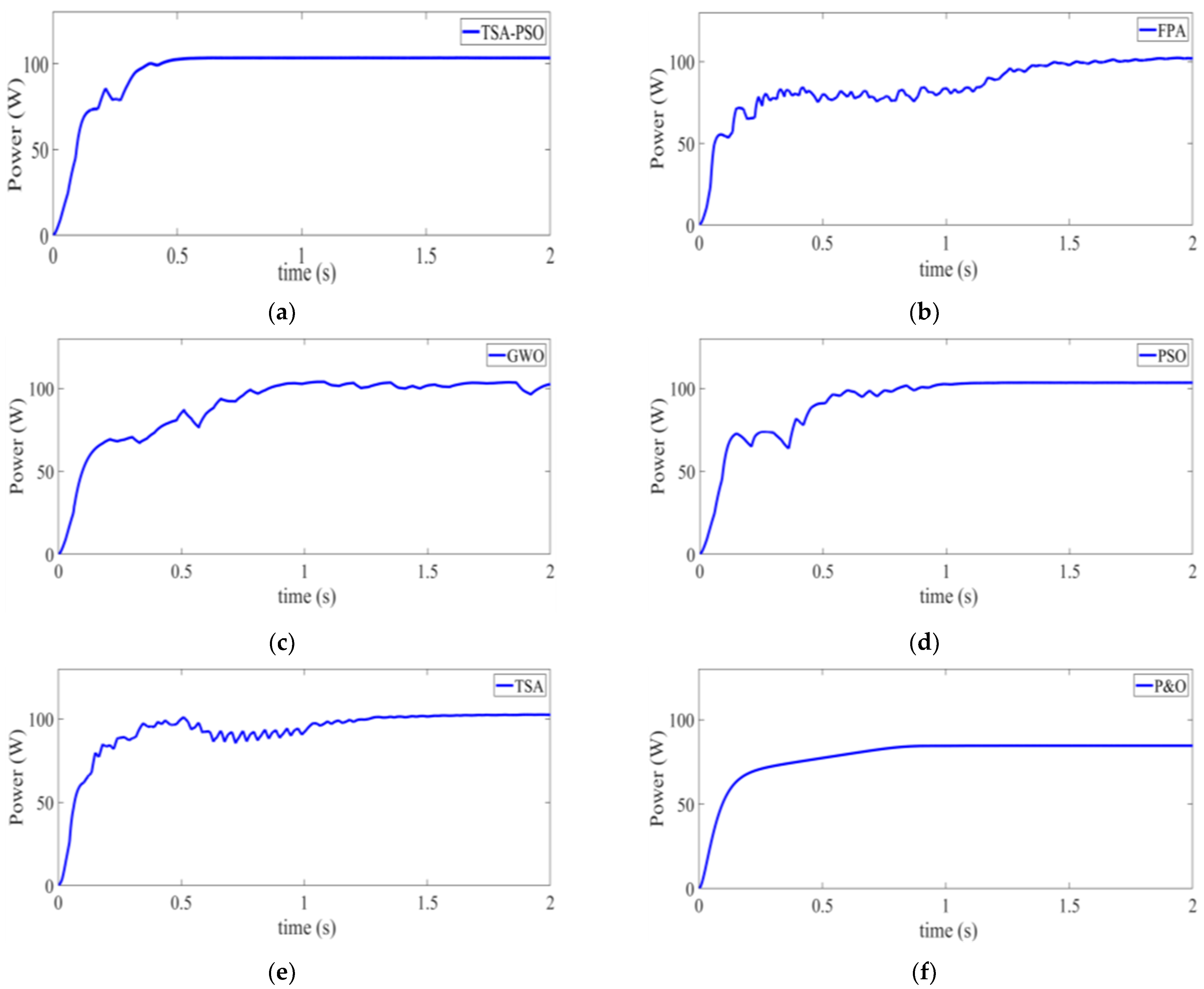
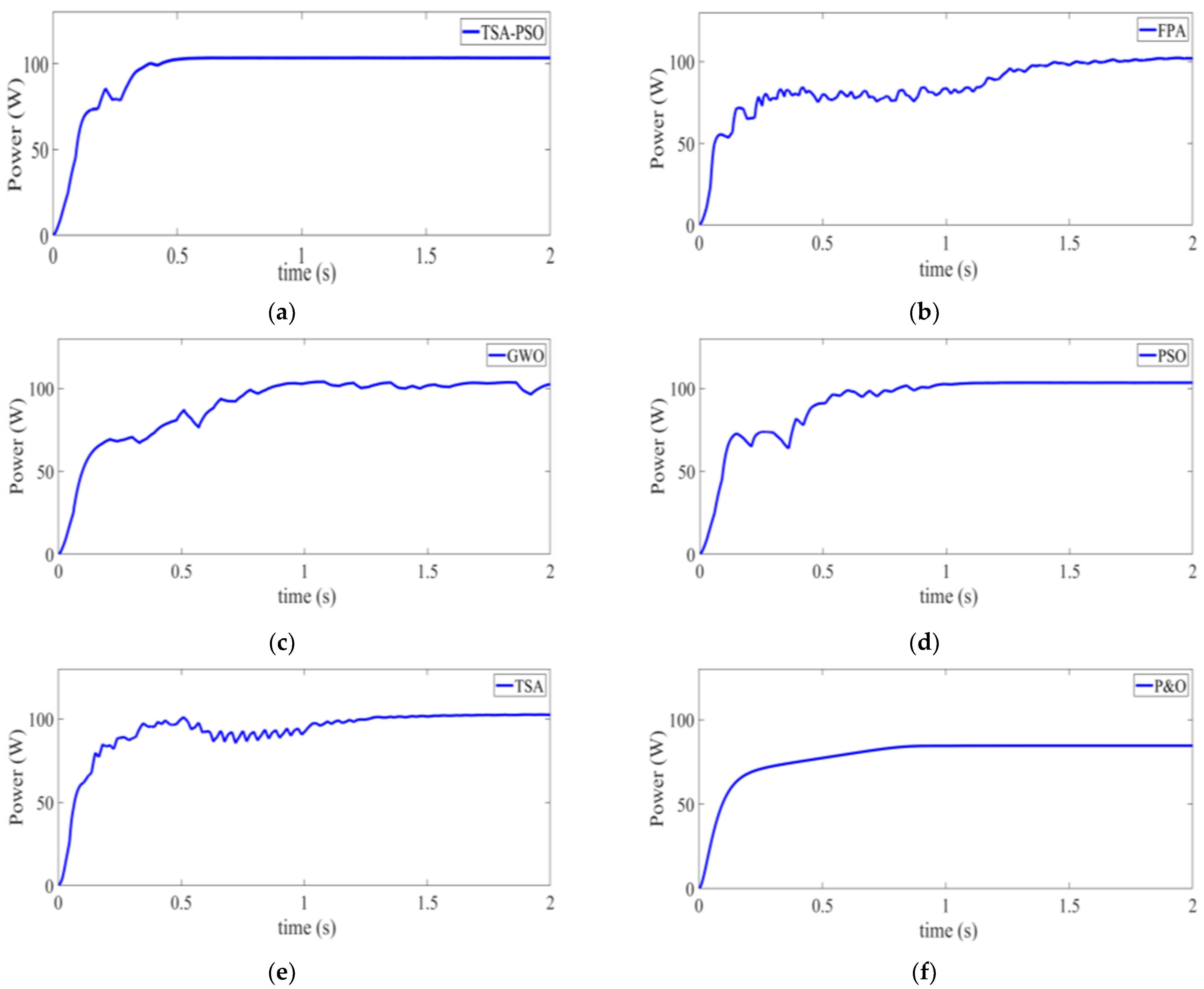
- Pattern-1:
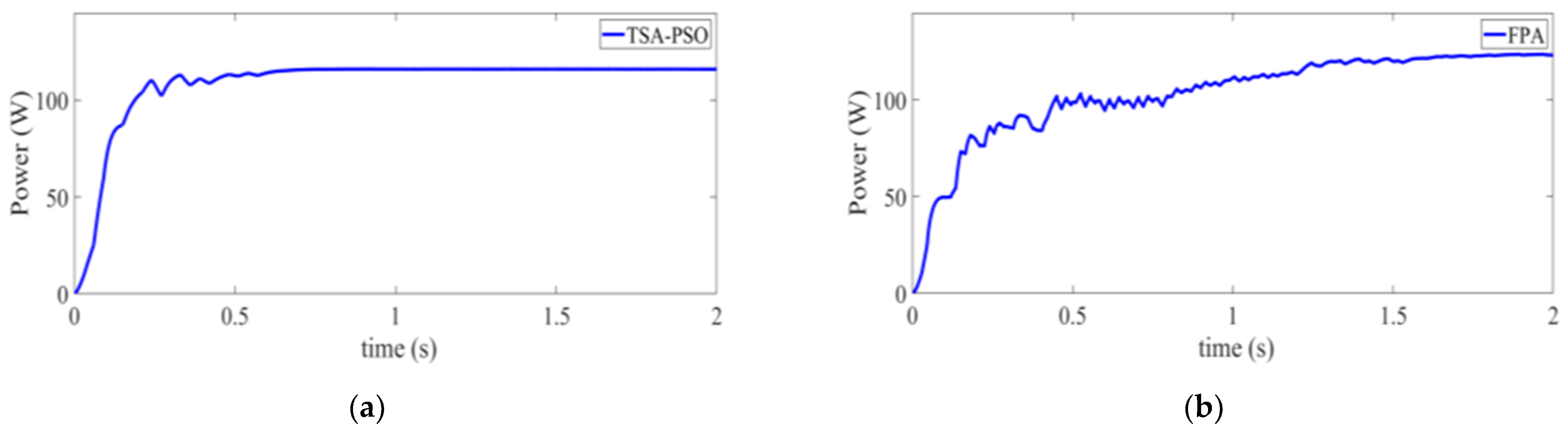
- Pattern-2:
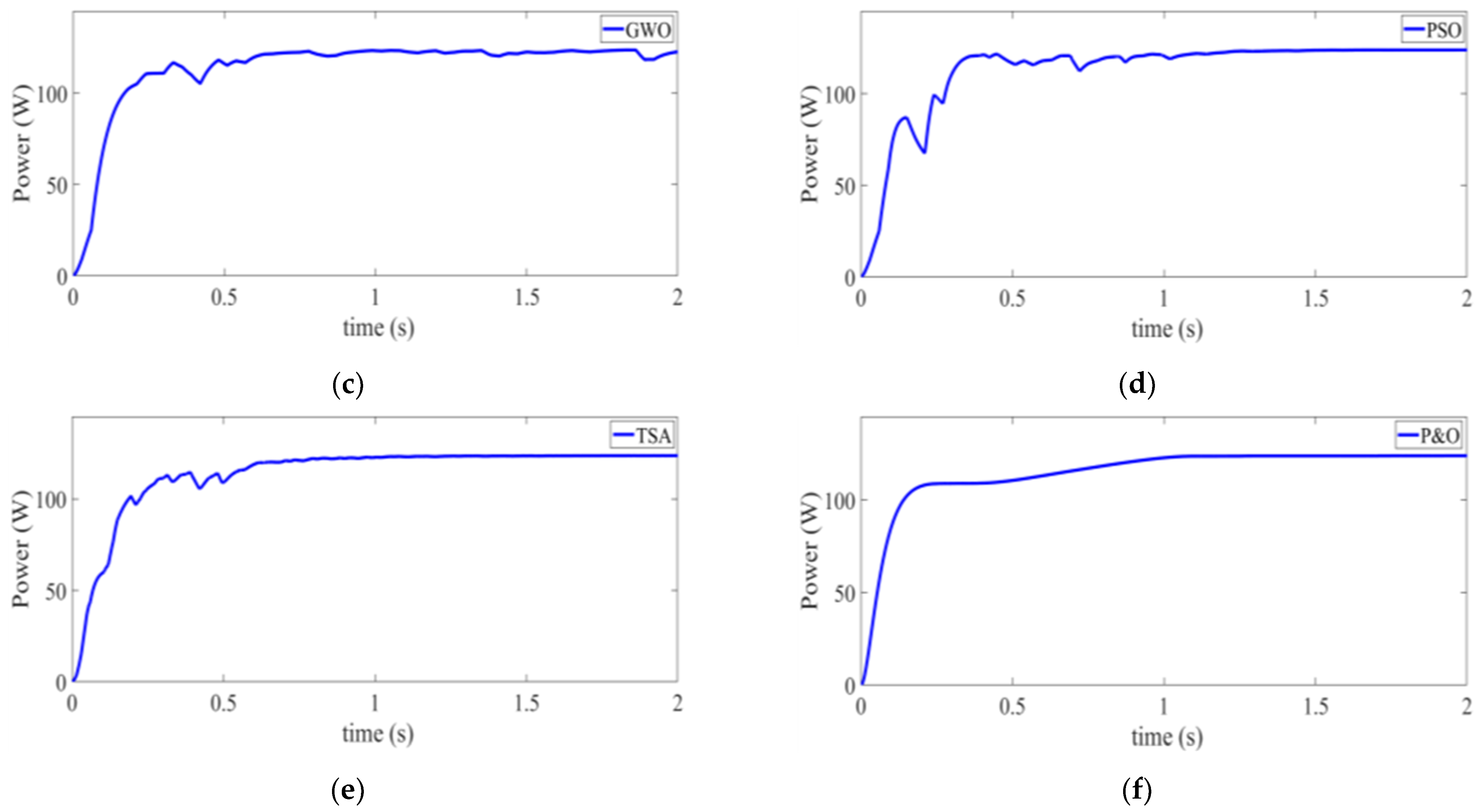
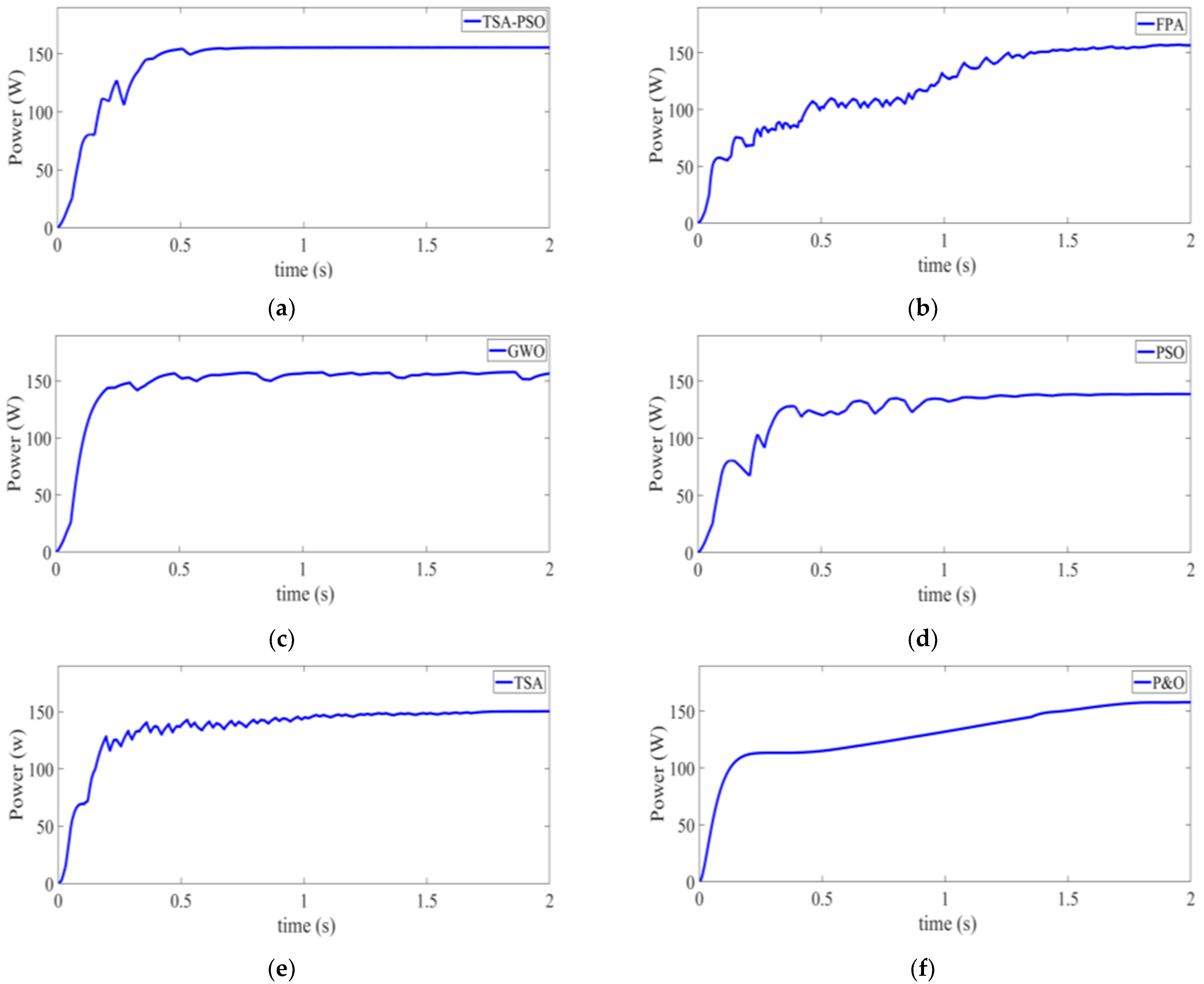
- Pattern-3:
5.2. Robustness and Statistical Analysis
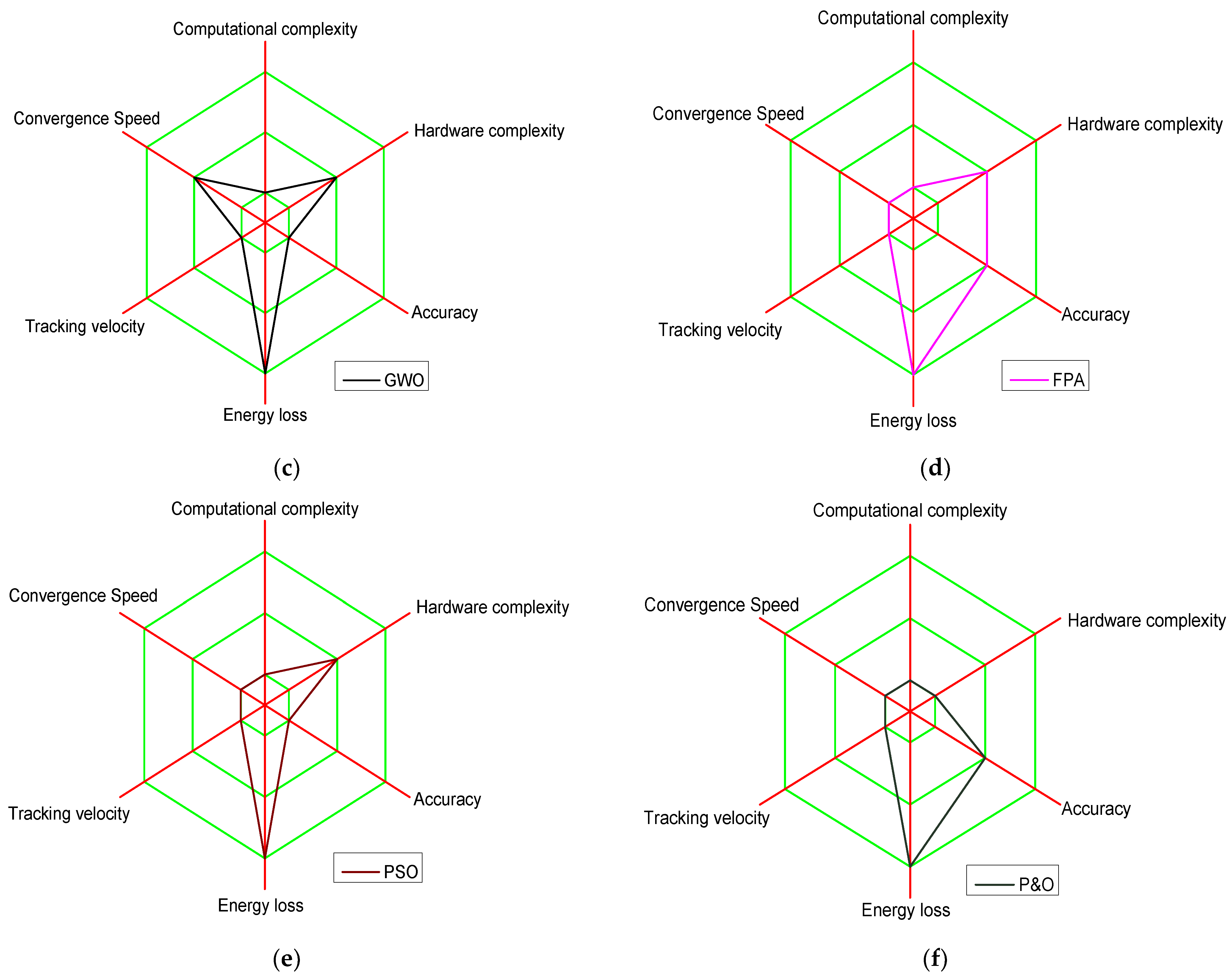
5.3. Qualitative Analysis of the Proposed TSA-PSO Hybrid MPPT
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ACO | Ant Colony Optimization |
| BA | Bat Algorithm |
| CS | Cuckoo Search |
| FPA | Flower Pollination Algorithm |
| GMPP | Global Maximum Power Point |
| GP | Global Power |
| GWO | Grey Wolf Optimization |
| HC | Hill Climbing |
| ICS | Improved Cuckoo Search |
| INC | Incremental Conductance |
| LMPP | Local Maximum Power Points |
| MPP | Maximum Power Point |
| MPPT | Maximum Power Point Tracker |
| P&O | Perturb and Observe |
| PSC | Partial Shading Conditions |
| PSO | Particle Swarm Optimization |
| PV | Photovoltaic |
| TSA | Tunicate Swarm Algorithm |
| TSA-PSO | Tunicate Swarm Algorithm-Particle Swarm Optimization |
References
- Priyadarshi, N.; Padmanaban, S.; Bhaskar, M.S.; Blaabjerg, F.; Holm-Nielsen, J.B.; Azam, F.; Sharma, A.K. A hybrid photovoltaic-fuel cell-based single-stage grid integration with Lyapunov control scheme. IEEE Syst. J. 2019, 14, 3334–3342. [Google Scholar] [CrossRef]
- Yao, X.; Yi, B.; Yu, Y.; Fan, Y.; Zhu, L. Economic analysis of grid integration of variable solar and wind power with conventional power system. Appl. Energy 2020, 264, 114706. [Google Scholar] [CrossRef]
- Mousavi, S.B.; Ahmadi, P.; Pourahmadiyan, A.; Hanafizadeh, P. A comprehensive techno-economic assessment of a novel compressed air energy storage (CAES) integrated with geothermal and solar energy. Sustain. Energy Technol. Assess. 2021, 47, 101418. [Google Scholar] [CrossRef]
- Rajput, S.; Averbukh, M.; Yahalom, A.; Minav, T. An Approval of MPPT Based on PV Cell’s Simplified Equivalent Circuit During Fast-Shading Conditions. Electronics 2019, 8, 1060. [Google Scholar] [CrossRef] [Green Version]
- Chepp, E.D.; Krenzinger, A. A methodology for prediction and assessment of shading on PV systems. Sol. Energy 2021, 216, 537–550. [Google Scholar] [CrossRef]
- Farahmand, M.Z.; Nazari, M.E.; Shamlou, S.; Shafie-khah, M. The Simultaneous Impacts of Seasonal Weather and Solar Conditions on PV Panels Electrical Characteristics. Energies 2021, 14, 845. [Google Scholar] [CrossRef]
- Altamimi, A.; Jayaweera, D. Reliability of power systems with climate change impacts on hierarchical levels of PV systems. Electr. Power Syst. Res. 2021, 190, 106830. [Google Scholar] [CrossRef]
- Rajput, S.; Averbukh, M. Chapter 1: MPPT Control Systems for PV Power Plants. In Applied Soft Computing and Embedded System Applications in Solar Energy, 1st ed.; CRC Press: London, UK, 2021. [Google Scholar]
- Babes, B.; Boutaghane, A.; Hamouda, N. A novel nature-inspired maximum power point tracking (MPPT) controller based on ACO-ANN algorithm for photovoltaic (PV) system fed arc welding machines. Neural Comput. Appl. 2021, 34, 299–317. [Google Scholar] [CrossRef]
- Sharma, A.; Dasgotra, A.; Tiwari, S.K.; Sharma, A.; Jately, V.; Azzopardi, B. Parameter extraction of photovoltaic module using tunicate swarm algorithm. Electronics 2021, 10, 878. [Google Scholar] [CrossRef]
- Jiang, L.L.; Maskell, D.L.; Patra, J.C. A novel ant colony optimization-based maximum power point tracking for photovoltaic systems under partially shaded conditions. Energy Build. 2013, 58, 227–236. [Google Scholar] [CrossRef]
- Shi, J.-Y.; Xue, F.; Qin, Z.-J.; Zhang, W.; Ling, L.-T.; Yang, T. Improved global maximum power point tracking for photovoltaic system via cuckoo search under partial shaded conditions. J. Power Electron. 2016, 16, 287–296. [Google Scholar] [CrossRef] [Green Version]
- Eltamaly, A.M.; Al-Saud, M.; Abokhalil, A.G. A novel bat algorithm strategy for maximum power point tracker of photovoltaic energy systems under dynamic partial shading. IEEE Access 2020, 8, 10048–10060. [Google Scholar] [CrossRef]
- Priyadarshi, N.; Ranjana, M.S.B.; Sanjeevikumar, P.; Blaabjerg, F.; Azam, F. New CUK–SEPIC converter based photovoltaic power system with hybrid GSA–PSO algorithm employing MPPT for water pumping applications. IET Power Electron. 2020, 13, 2824–2830. [Google Scholar] [CrossRef]
- Sharma, A.; Sharma, A.; Dasgotra, A.; Jately, V.; Ram, M.; Rajput, S.; Averbukh, M.; Azzopardi, B. Opposition-based tunicate swarm algorithm for parameter optimization of solar cells. IEEE Access 2021, 9, 125590–125602. [Google Scholar] [CrossRef]
- Etarhouni, M.; Chong, B.; Zhang, L. A combined scheme for maximising the output power of a Photovoltaic array under partial shading conditions. Sustain. Energy Technol. Assess. 2022, 50, 101878. [Google Scholar] [CrossRef]
- Chalh, A.; El Hammoumi, A.; Motahhir, S.; El Ghzizal, A.; Derouich, A.; Masud, M.; AlZain, M.A. Investigation of Partial Shading Scenarios on a Photovoltaic Array’s Characteristics. Electronics 2022, 11, 96. [Google Scholar] [CrossRef]
- Yang, Z.; Zhang, N.; Wang, J.; Liu, Y.; Fu, L. Improved non-symmetrical puzzle reconfiguration scheme for power loss reduction in photovoltaic systems under partial shading conditions. Sustain. Energy Technol. Assess. 2022, 51, 101934. [Google Scholar] [CrossRef]
- Javed, S.; Ishaque, K. A comprehensive analyses with new findings of different PSO variants for MPPT problem under partial shading. Ain Shams Eng. J. 2022, 13, 101680. [Google Scholar] [CrossRef]
- Molleti, V.P.L.; Kasibhatla, R.; Rajamahanthi, V. Modeling and Implementation of Statechart for MPPT Control of Photovoltaic System in FPGA. In Machine Learning, Advances in Computing, Renewable Energy and Communication; Springer: Singapore, 2022; pp. 293–304. [Google Scholar]
- Jiang, Y.; Xu, J.; Leng, X.; Eghbalian, N. A novel hybrid maximum power point tracking method based on improving the effectiveness of different configuration partial shadow. Sustain. Energy Technol. Assess. 2022, 50, 101835. [Google Scholar] [CrossRef]
- Roni, M.; Karim, H.; Rana, M.S.; Pota, H.R.; Hasan, M.; Hussain, M. Recent trends in bio-inspired meta-heuristic optimization techniques in control applications for electrical systems: A review. Int. J. Dyn. Control 2022, 1–13. [Google Scholar] [CrossRef]
- Sarwar, S.; Javed, M.Y.; Jaffery, M.H.; Arshad, J.; Ur Rehman, A.; Shafiq, M.; Choi, J.G. A Novel Hybrid MPPT Technique to Maximize Power Harvesting from PV System under Partial and Complex Partial Shading. Appl. Sci. 2022, 12, 587. [Google Scholar] [CrossRef]
- Tey, K.S.; Mekhilef, S.; Seyedmahmoudian, M.; Horan, B.; Oo, A.T.; Stojcevski, A. Improved differential evolution-based MPPT algorithm using SEPIC for PV systems under partial shading conditions and load variation. IEEE Trans. Ind. Inform. 2018, 14, 4322–4333. [Google Scholar] [CrossRef]
- Ram, J.P.; Rajasekar, N. A novel flower pollination based global maximum power point method for solar maximum power point tracking. IEEE Trans. Power Electron. 2016, 32, 8486–8499. [Google Scholar]
- Li, H.; Yang, D.; Su, W.; Lu, J.; Yu, X. An overall distribution particle swarm optimization MPPT algorithm for photovoltaic system under partial shading. IEEE Trans. Ind. Electron. 2018, 66, 265–275. [Google Scholar] [CrossRef]
- Ram, J.P.; Pillai, D.S.; Rajasekar, N.; Strachan, S.M. Detection and identification of global maximum power point operation in solar PV applications using a hybrid ELPSO-P&O tracking technique. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 1361–1374. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; IEEE: Piscataway, NJ, USA, 1995. [Google Scholar]
- Sharma, A.; Shoval, S.; Sharma, A.; Pandey, J.K. Path Planning for Multiple Targets Interception by the Swarm of UAVs based on Swarm Intelligence Algorithms: A Review. IETE Tech. Rev. 2021, 1–23. [Google Scholar] [CrossRef]
- Yang, X.-S. Flower pollination algorithm for global optimization. In Proceedings of the International Conference on Unconventional Computing and Natural Computation, Orléan, France, 3–7 September 2012; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Sharma, A.; Sharma, A.; Pandey, J.K.; Ram, M. Swarm Intelligence: Foundation, Principles, and Engineering Applications; CRC Press: Boca Raton, FL, USA, 2022. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Kaur, S.; Awasthi, L.K.; Sangal, A.; Dhiman, G. Tunicate Swarm Algorithm: A new bio-inspired based metaheuristic paradigm for global optimization. Eng. Appl. Artif. Intell. 2020, 90, 103541. [Google Scholar] [CrossRef]
- Jately, V.; Azzopardi, B.; Joshi, J.; Venkateswaran, V.B.; Sharma, A.; Arora, S. Experimental Analysis of hill-climbing MPPT algorithms under low irradiance levels. Renew. Sustain. Energy Rev. 2021, 150, 111467. [Google Scholar] [CrossRef]
- Jately, V.; Bhattacharya, S.; Azzopardi, B.; de Montgareuil, A.G.; Joshi, J.; Arora, S. Voltage and current reference based MPPT under rapidly changing irradiance and load resistance. IEEE Trans. Energy Convers. 2021, 36, 2297–2309. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | Parameters |
|---|---|
| FPA | Switching probability = 0.8 Lévy step size scaling factor = 0.01 λ = 1.5 |
| GWO | All parameters updated during iteration |
| TSA | Pmin = 1, Pmax = 4 |
| PSO | C1 = [1, 2], C2 = [1, 2], w = [0.1, 1] |
| P&O | Δd = 0.001, dmax = 0.65, dmin = 0.32 |
| Parameters | Value |
|---|---|
| Maximum power, Pmax (W) | 85 W |
| Voltage MPP, VMP (V) | 17.6 V |
| Current MPP, IMP (A) | 4.83 A |
| Open-circuit voltage, Voc (V) | 21.9 V |
| Short-circuit current MPP, ISC (A) | 5.24 A |
| Temperature coefficient of Voc (%/°C) | −0.3 |
| Temperature coefficient of Isc (%/°C) | 0.05 |
| Technique | Rated Power (W) | Maximum Extracted Power (W) | Tracking Time (s) | Number of Iterations | Maximum Efficiency Extracted from PV Panels (%) |
|---|---|---|---|---|---|
| TSA-PSO | 104.50 | 103.36 | 0.38 | 12 | 97.44 |
| FPA | 102.00 | 1.60 | 23 | 85.85 | |
| GWO | 102.63 | 1.57 | 15 | 90.63 | |
| TSA | 102.50 | 1.09 | 20 | 93.52 | |
| PSO | 102.73 | 0.94 | 17 | 93.38 | |
| P&O | 84.58 | 0.81 | 10 | 77.07 |
| Technique | Rated Power (W) | Maximum Extracted Power (W) | Tracking Time (s) | Number of Iterations | Maximum Efficiency Extracted from PV Panels |
|---|---|---|---|---|---|
| TSA-PSO | 123.88 | 122.88 | 0.54 | 15 | 98.20 |
| FPA | 121.30 | 1.40 | 22 | 94.34 | |
| GWO | 122.73 | 0.80 | 18 | 81.80 | |
| TSA | 120.68 | 0.68 | 16 | 92.13 | |
| PSO | 121.45 | 0.95 | 23 | 93.36 | |
| P&O | 115.95 | 0.81 | 12 | 81.80 |
| Technique | Rated Power (W) | Maximum Extracted Power (W) | Tracking Time (s) | Number of Iterations | Maximum Efficiency Extracted from PV Panels |
|---|---|---|---|---|---|
| TSA-PSO | 157.95 | 156.84 | 0.40 | 11 | 97.36 |
| FPA | 156.67 | 1.31 | 24 | 89.39 | |
| GWO | 156.56 | 1.03 | 18 | 96.37 | |
| TSA | 150.29 | 1.19 | 20 | 87.52 | |
| PSO | 138.66 | 1.02 | 15 | 95.14 | |
| P&O | 155.35 | 1.64 | 12 | 94.20 |
| Shading Patterns | Algorithm | Power (W) | |||
|---|---|---|---|---|---|
| Max | Mean | SD | Rank-Sum | ||
| Pattern-1 | TSA-PSO | 103.36 | 77.07 | 14.07 | |
| FPA | 102.00 | 87.73 | 15.77 | (+) | |
| GWO | 102.63 | 90.63 | 16.73 | (+) | |
| TSA | 102.50 | 93.52 | 14.69 | (+) | |
| PSO | 102.73 | 93.38 | 18.17 | (+) | |
| P&O | 84.58 | 97.44 | 15.13 | (+) | |
| Pattern-2 | TSA-PSO | 122.88 | 106.02 | 17.55 | |
| FPA | 121.30 | 114.83 | 21.13 | (+) | |
| GWO | 122.73 | 115.47 | 18.75 | (+) | |
| TSA | 120.68 | 115.39 | 19.30 | (+) | |
| PSO | 121.45 | 114.46 | 20.75 | (+) | |
| P&O | 115.95 | 110.30 | 18.63 | (+) | |
| Pattern-3 | TSA-PSO | 156.84 | 124.47 | 23.89 | |
| FPA | 156.67 | 144.75 | 32.58 | (+) | |
| GWO | 156.56 | 148.35 | 23.99 | (+) | |
| TSA | 150.29 | 137.28 | 27.62 | (+) | |
| PSO | 138.66 | 125.35 | 24.30 | (+) | |
| P&O | 155.35 | 129.63 | 26.23 | (+) | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sharma, A.; Sharma, A.; Jately, V.; Averbukh, M.; Rajput, S.; Azzopardi, B. A Novel TSA-PSO Based Hybrid Algorithm for GMPP Tracking under Partial Shading Conditions. Energies 2022, 15, 3164. https://doi.org/10.3390/en15093164
Sharma A, Sharma A, Jately V, Averbukh M, Rajput S, Azzopardi B. A Novel TSA-PSO Based Hybrid Algorithm for GMPP Tracking under Partial Shading Conditions. Energies. 2022; 15(9):3164. https://doi.org/10.3390/en15093164
Chicago/Turabian StyleSharma, Abhishek, Abhinav Sharma, Vibhu Jately, Moshe Averbukh, Shailendra Rajput, and Brian Azzopardi. 2022. "A Novel TSA-PSO Based Hybrid Algorithm for GMPP Tracking under Partial Shading Conditions" Energies 15, no. 9: 3164. https://doi.org/10.3390/en15093164
APA StyleSharma, A., Sharma, A., Jately, V., Averbukh, M., Rajput, S., & Azzopardi, B. (2022). A Novel TSA-PSO Based Hybrid Algorithm for GMPP Tracking under Partial Shading Conditions. Energies, 15(9), 3164. https://doi.org/10.3390/en15093164