
Displacement-Constrained Neural Network Control of Maglev Trains Based on a Multi-Mass-Point Model


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Maglev Train Dynamic Model
2.1. Maglev Train Traction and Braking Force
2.2. Maglev Train Running Resistance
2.2.1. Basic Resistance
2.2.2. Additional Resistance
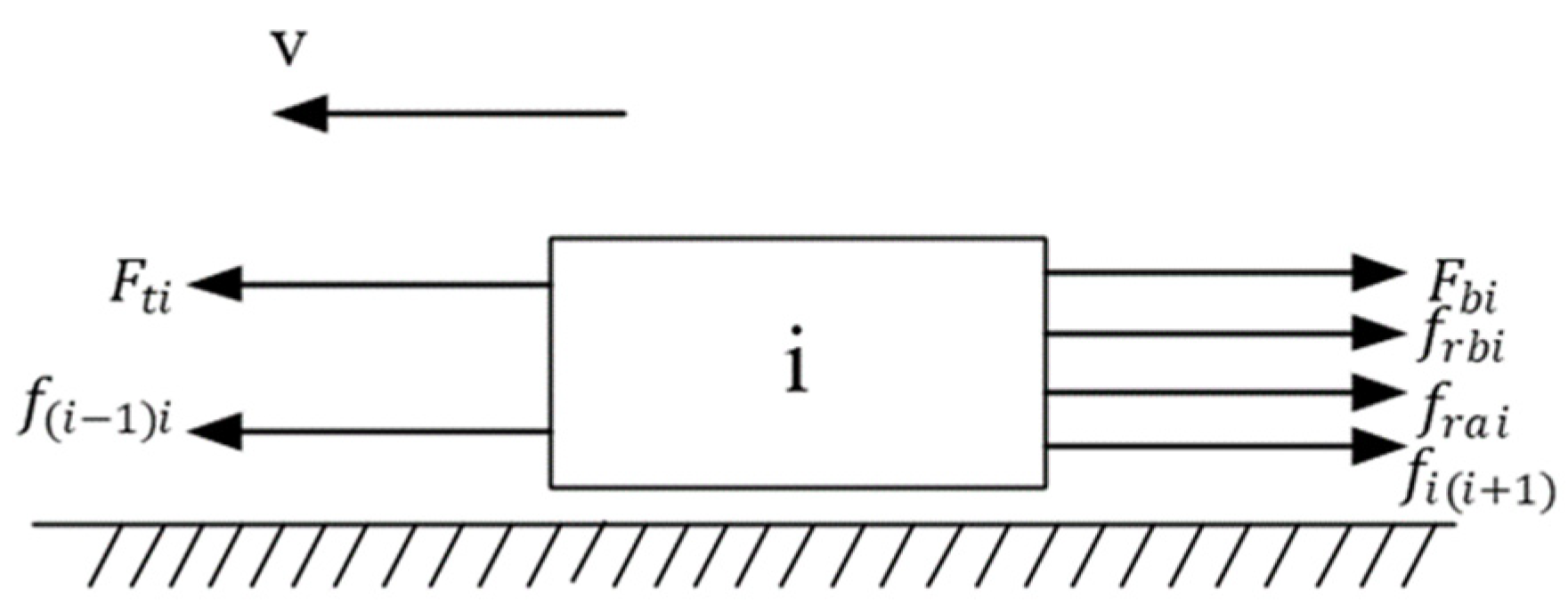
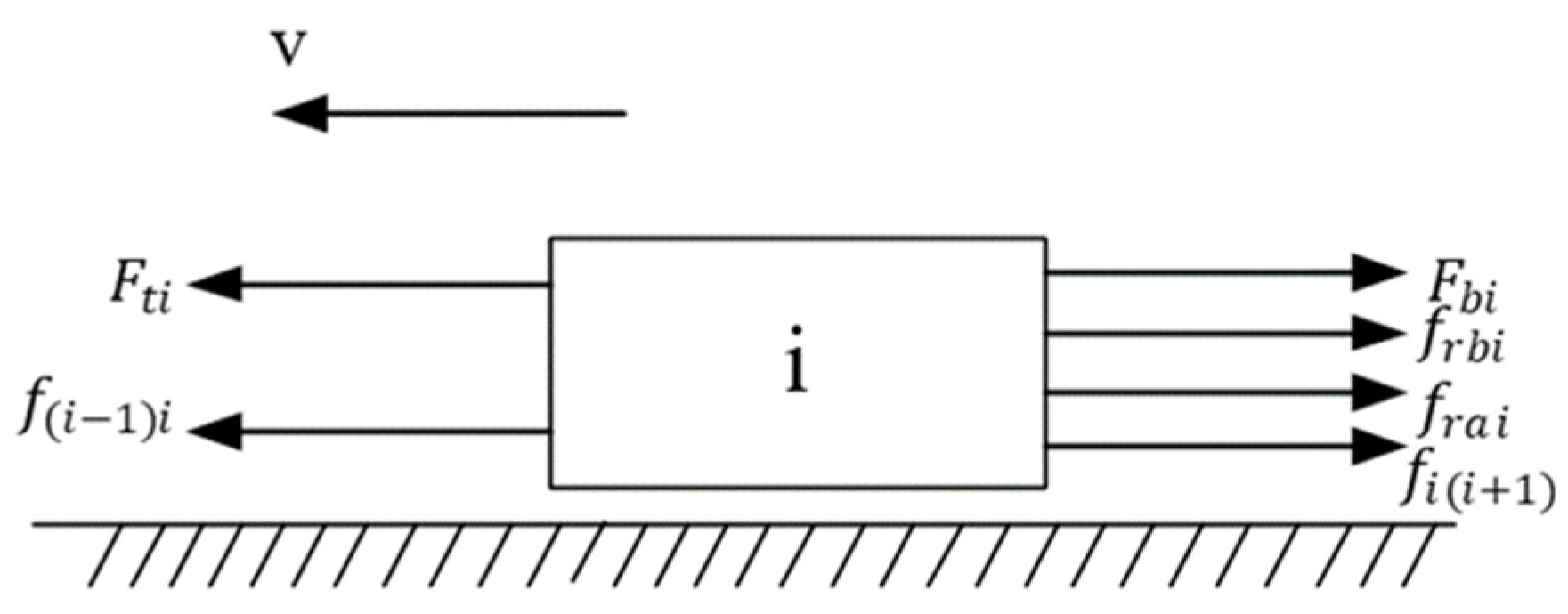
2.3. Forces between Maglev Train Sections
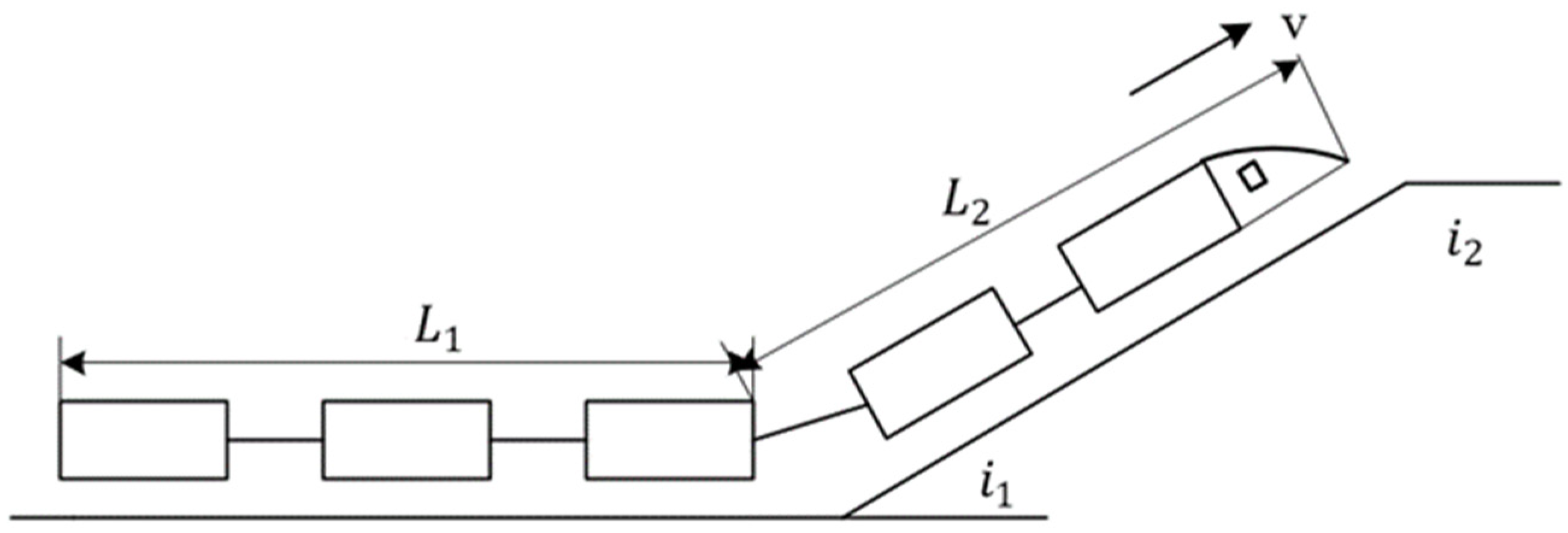
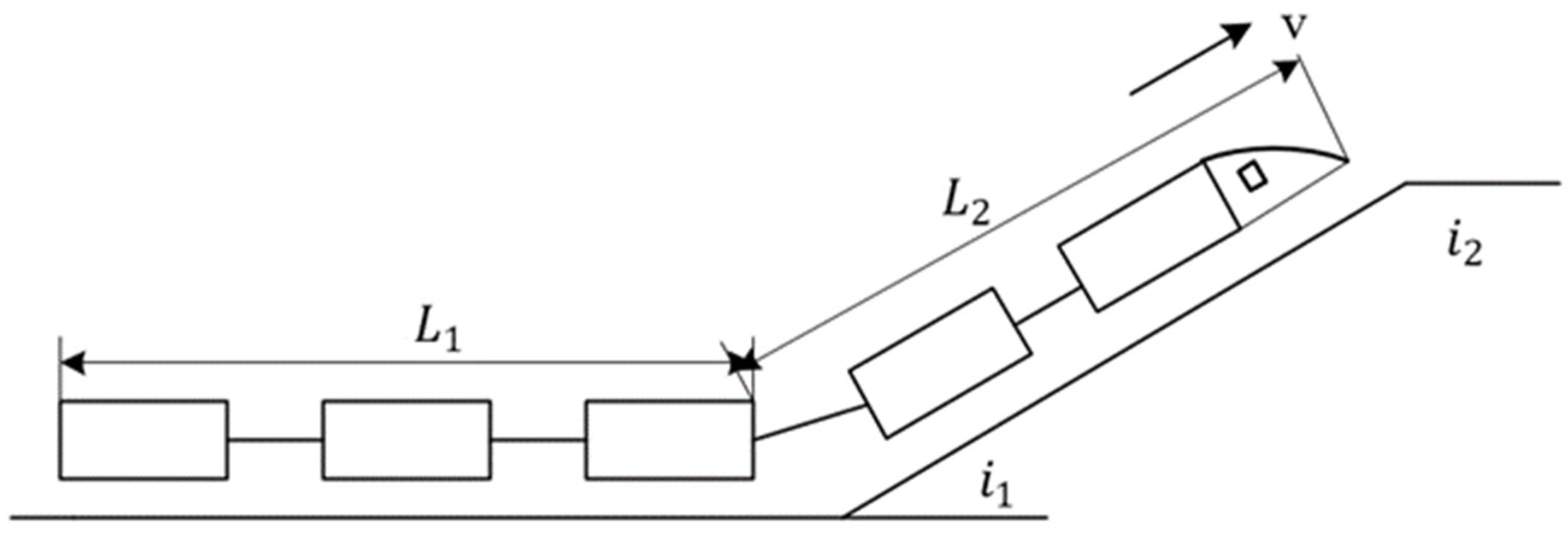
2.4. Multi-Mass Dynamics Model of Maglev Trains
3. Radial-Based Neural Network for the Displacement-Limited Operation Control of Maglev Trains
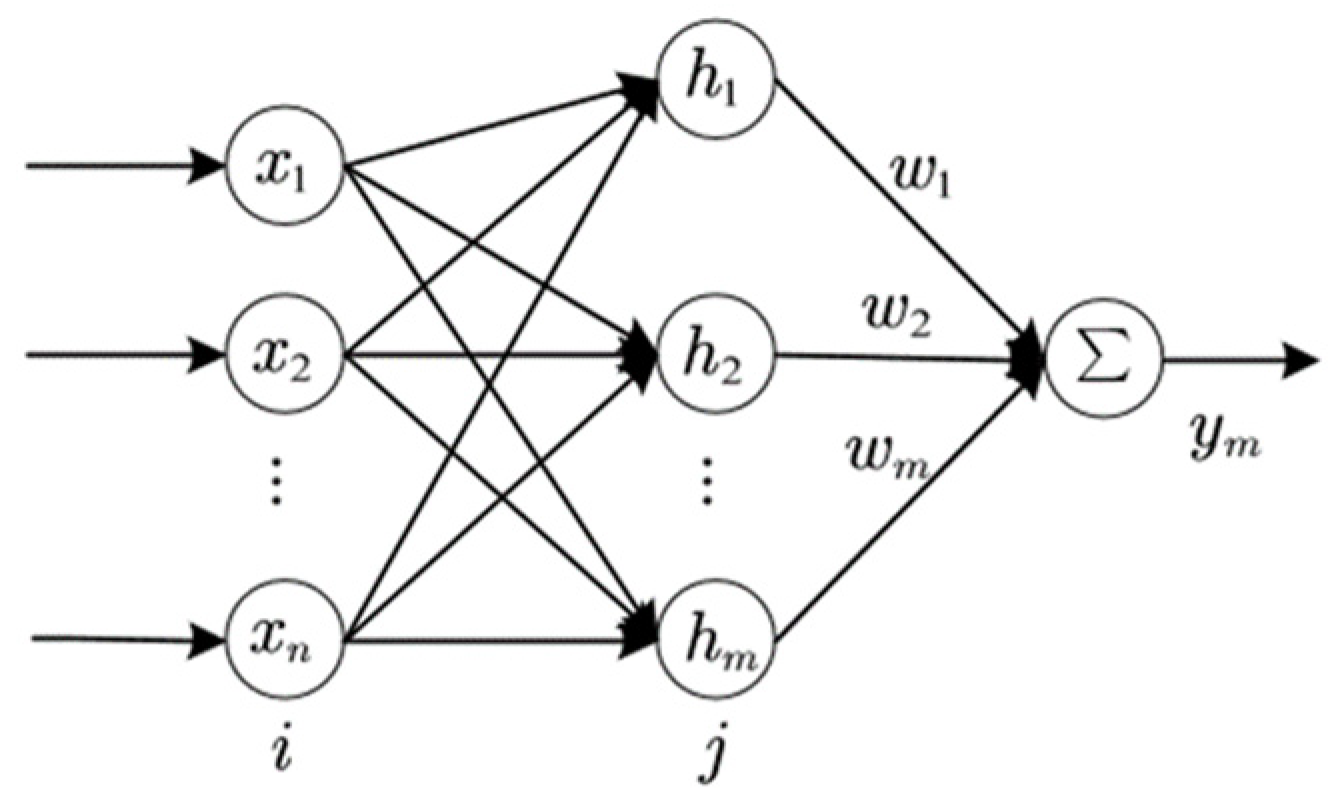
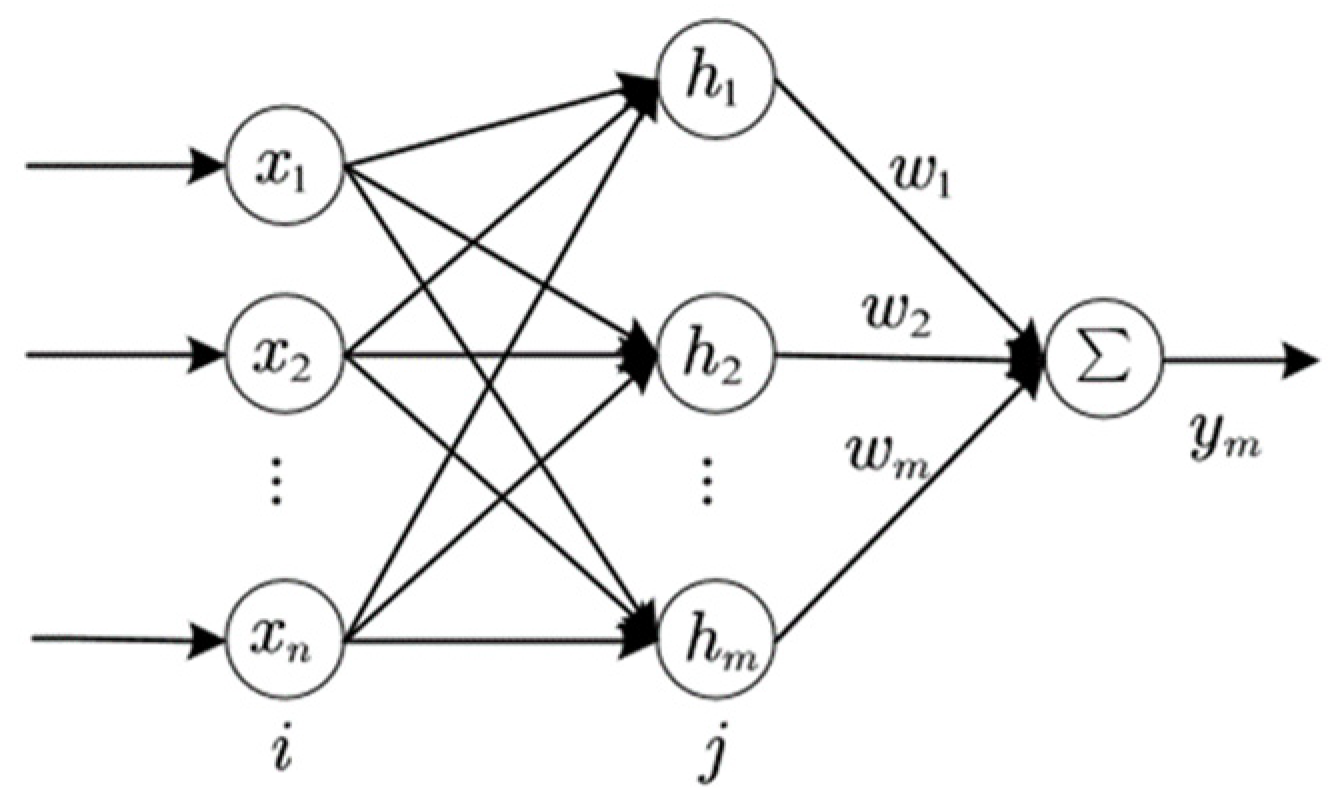
3.1. Radial-Based Neural Network
3.2. Radial-Based Neural Network for the Design of a Displacement-Constrained Operation Controller for Maglev Trains
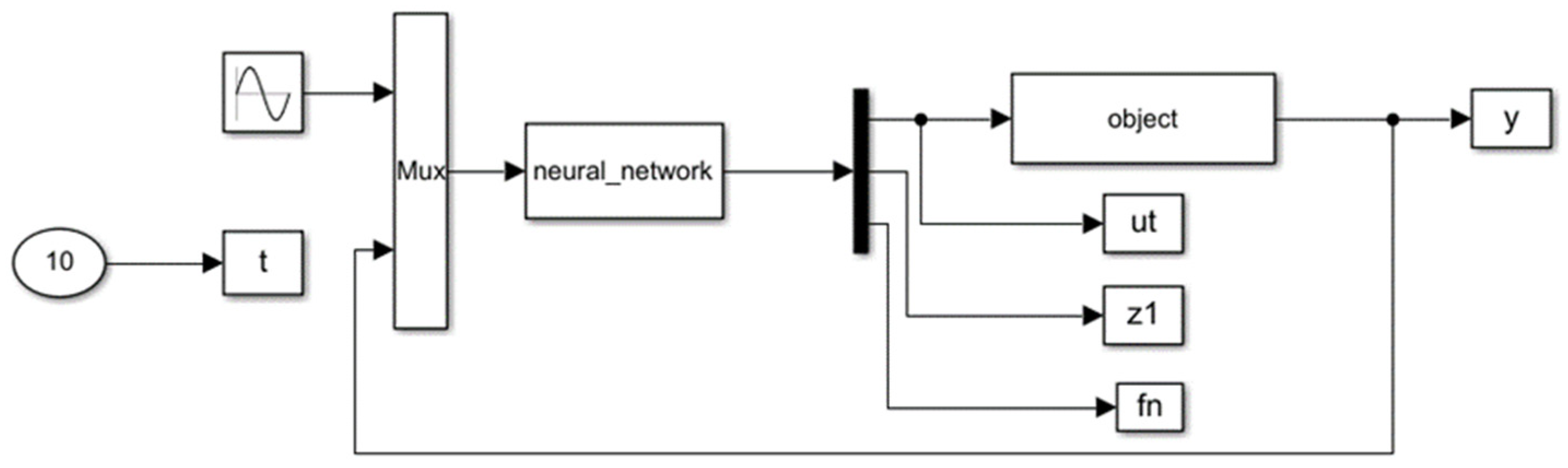
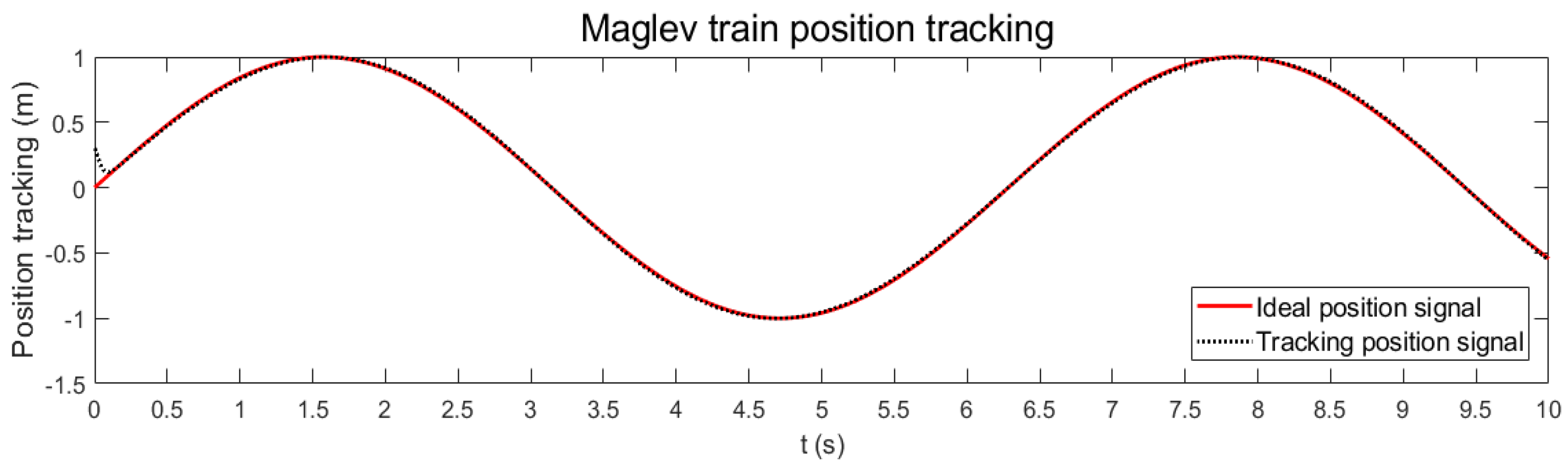
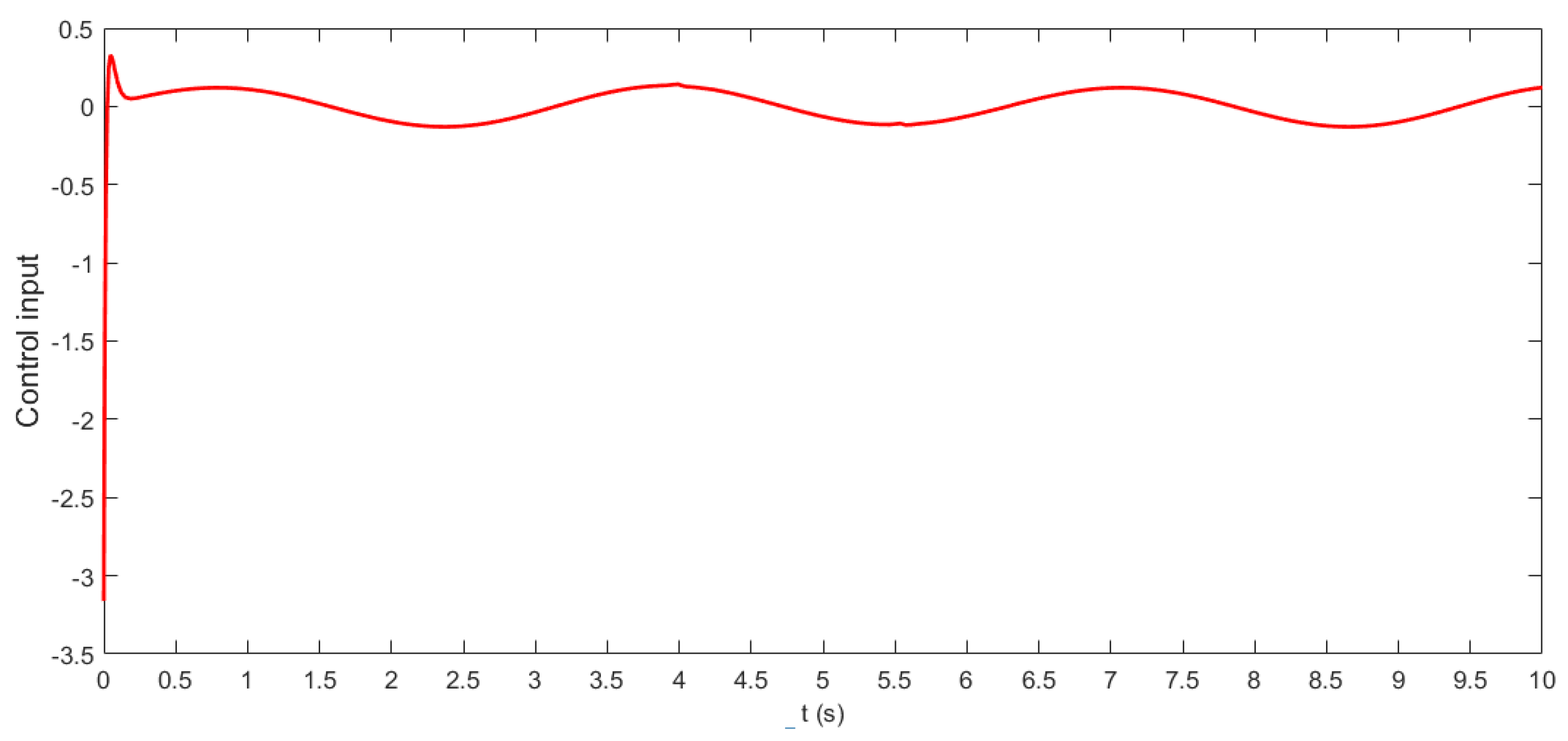
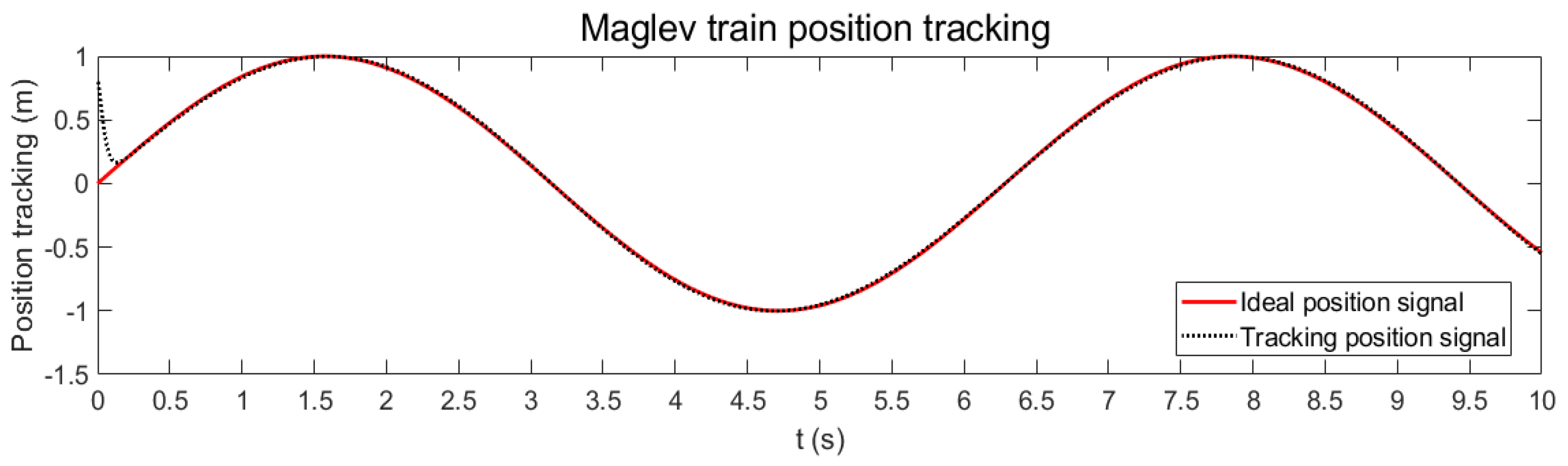
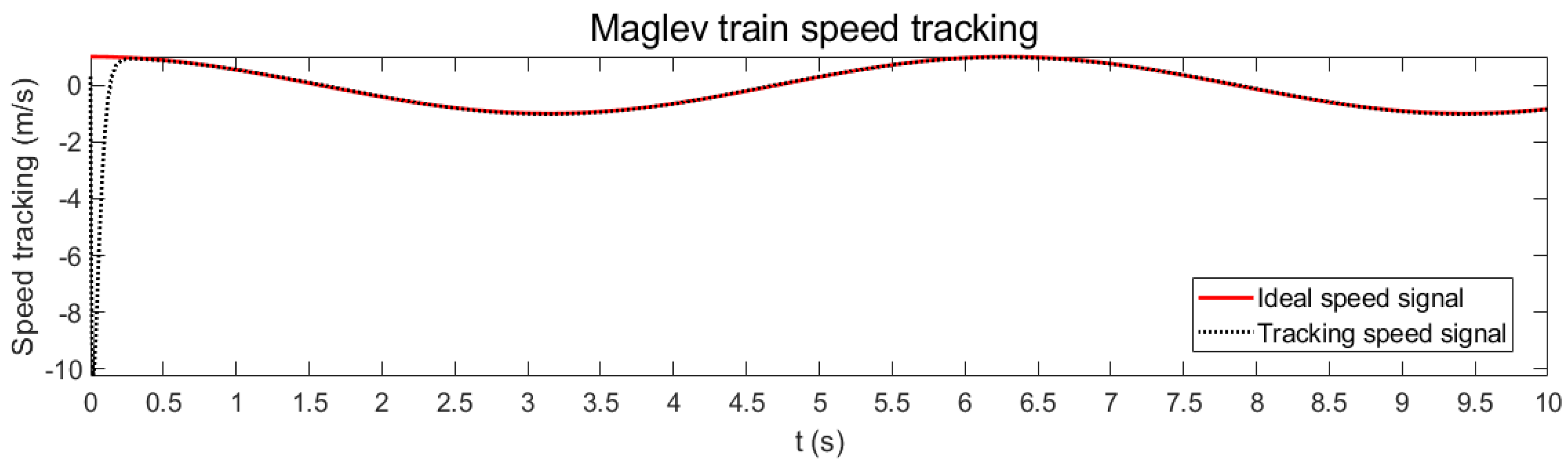
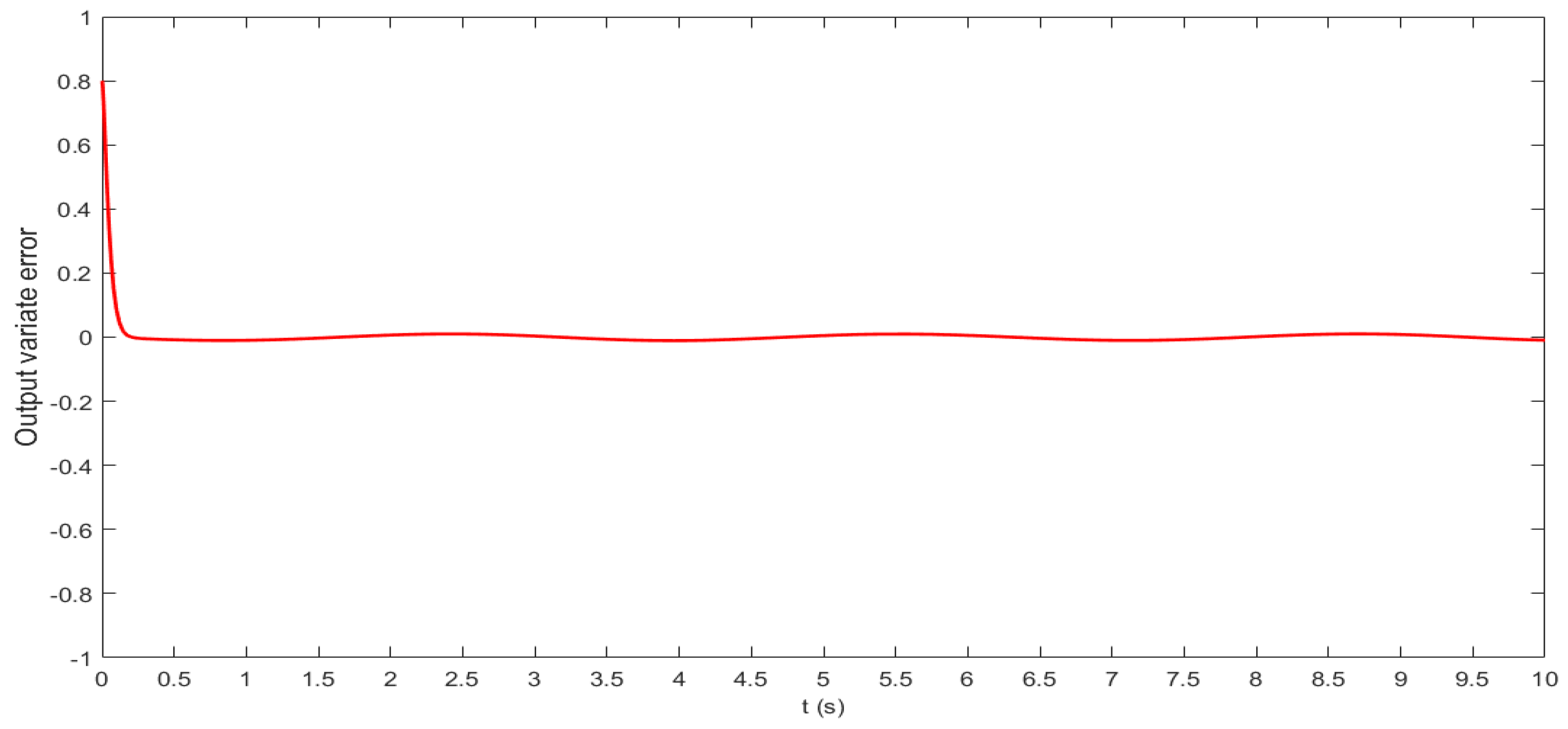
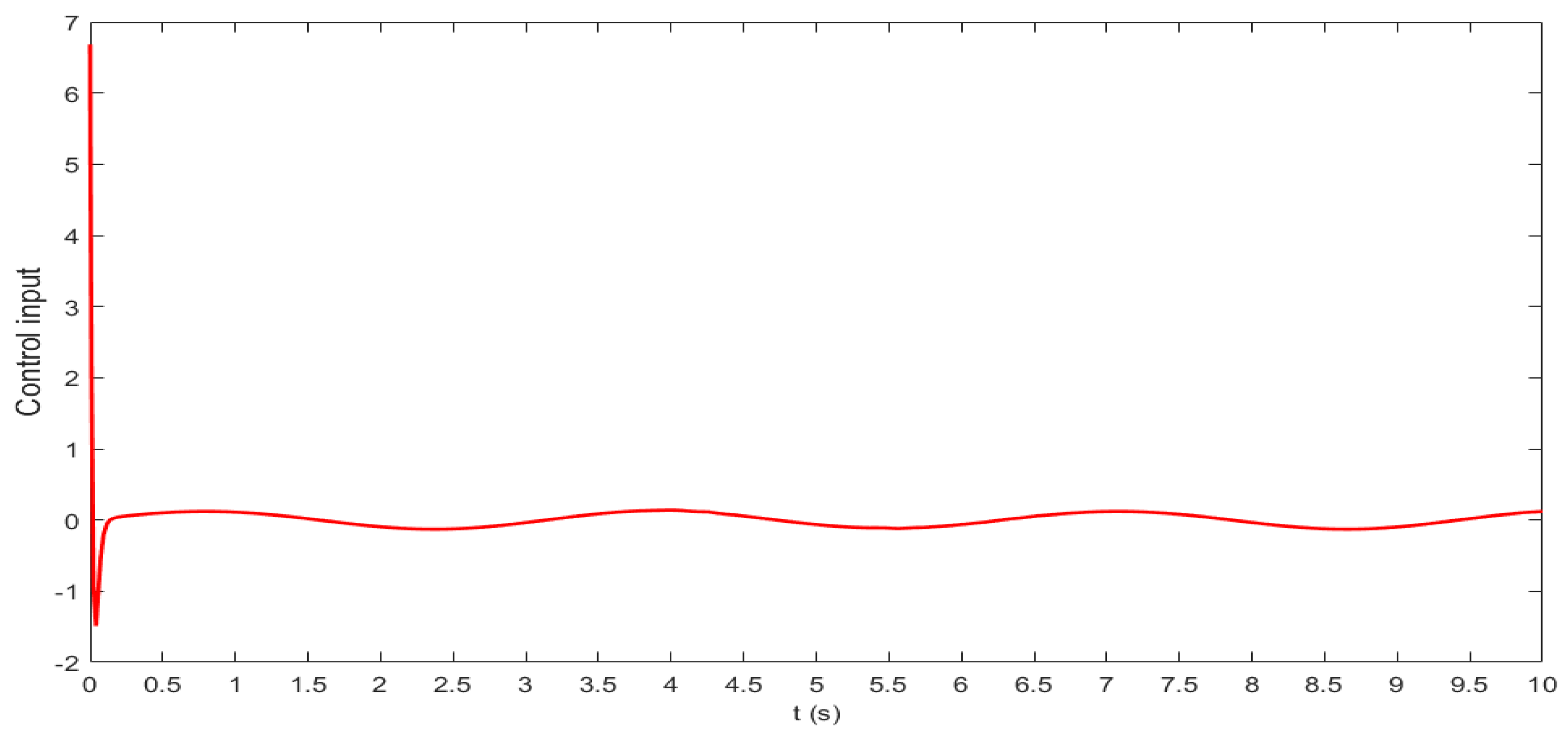
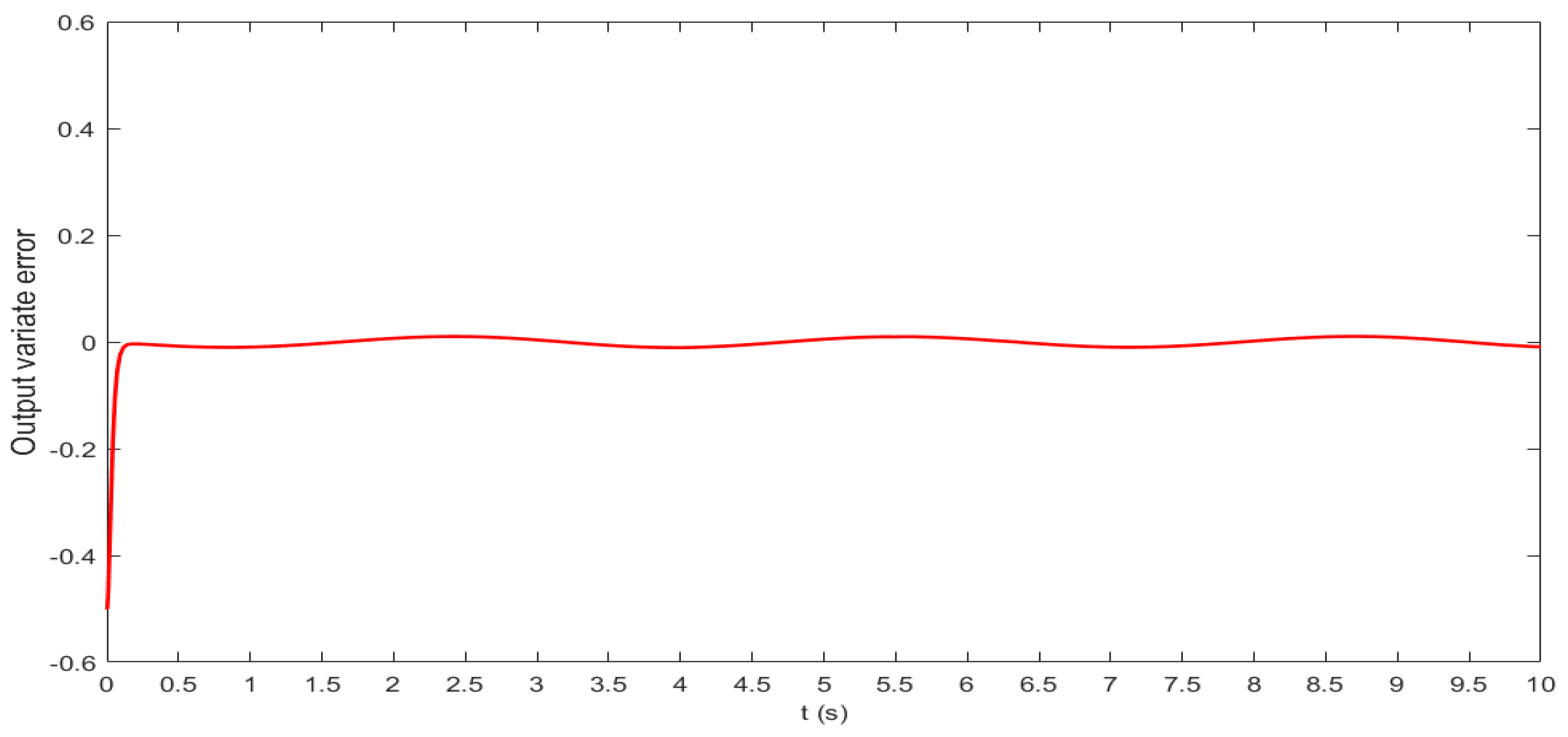
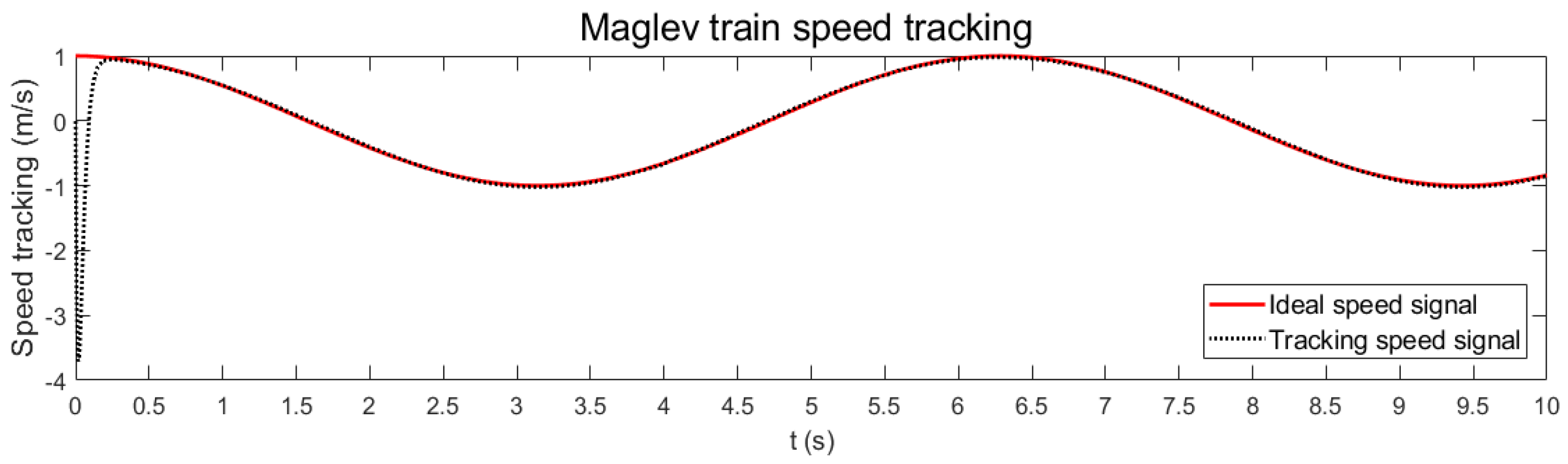
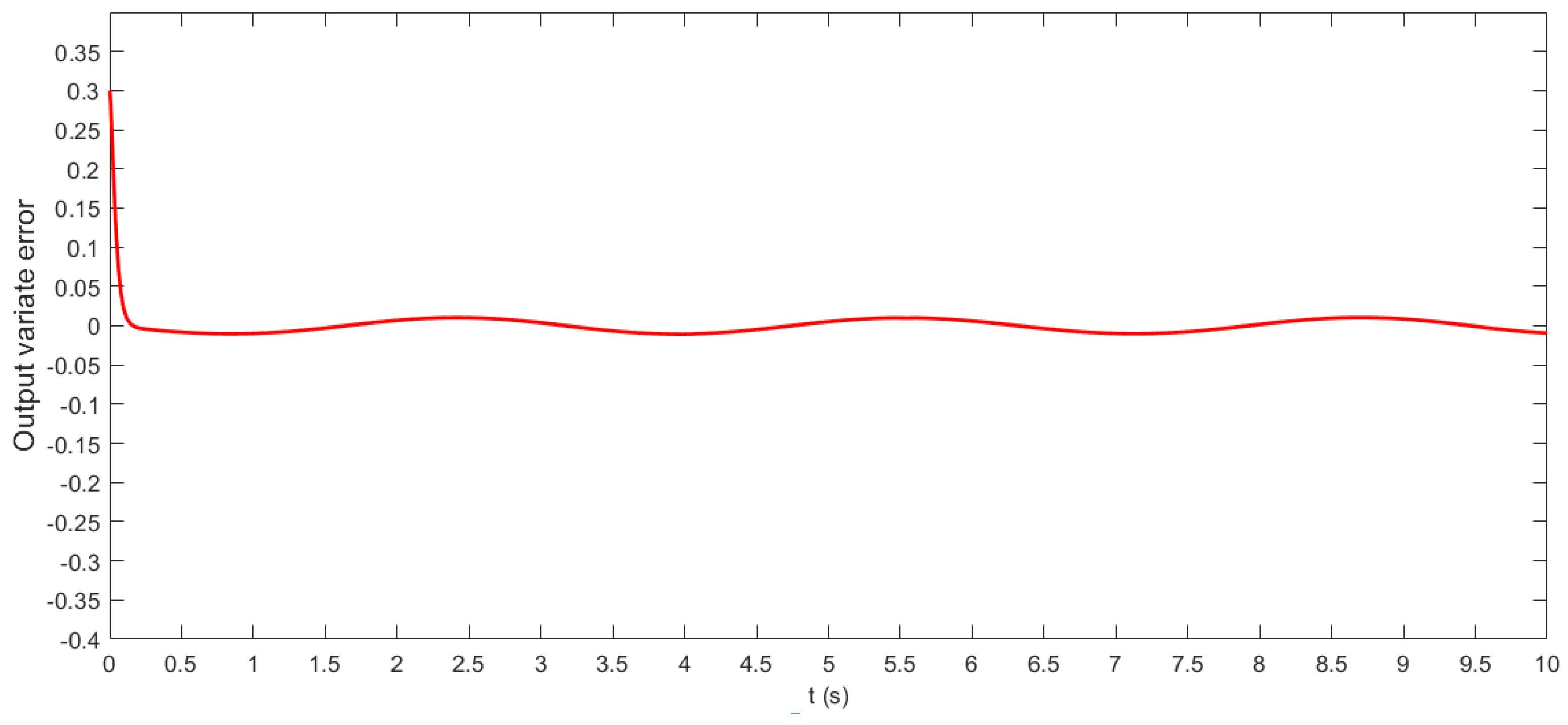
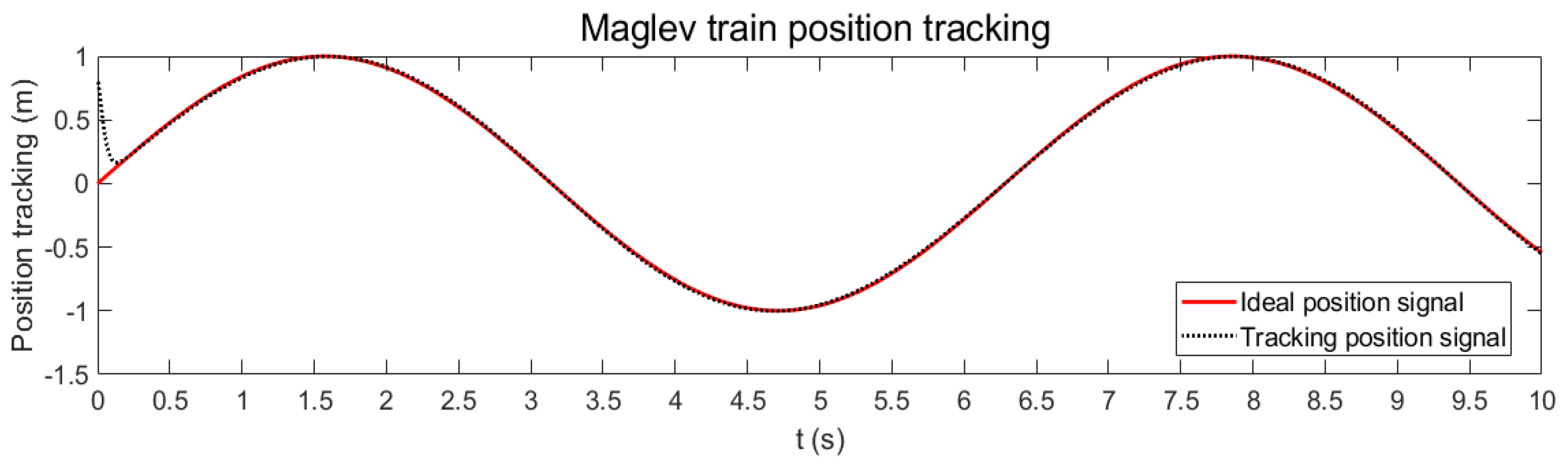
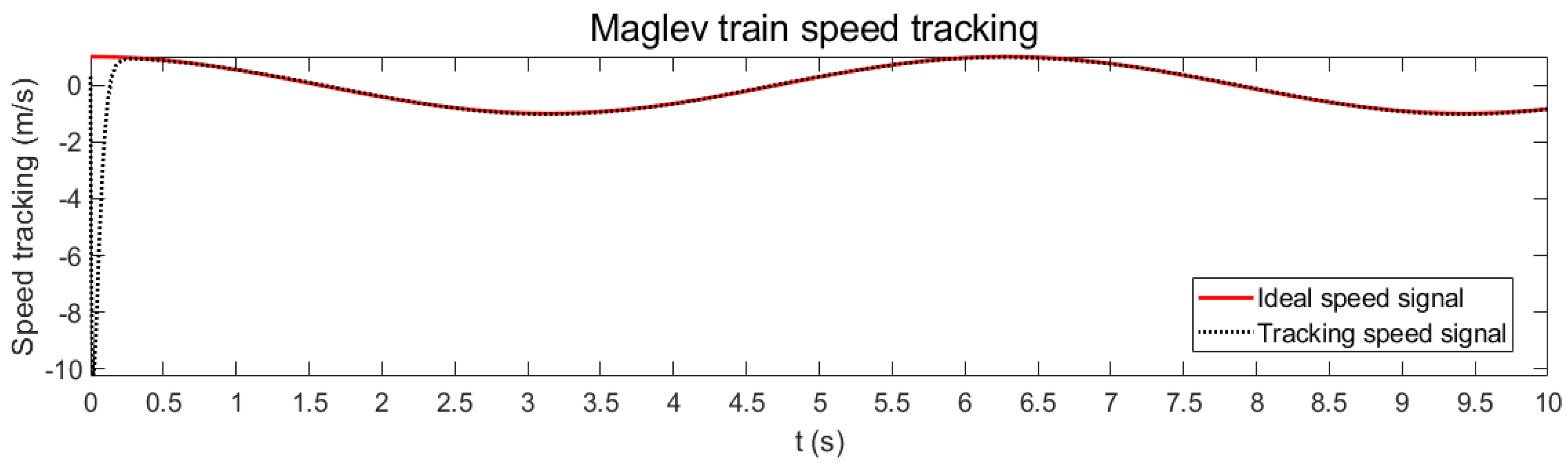
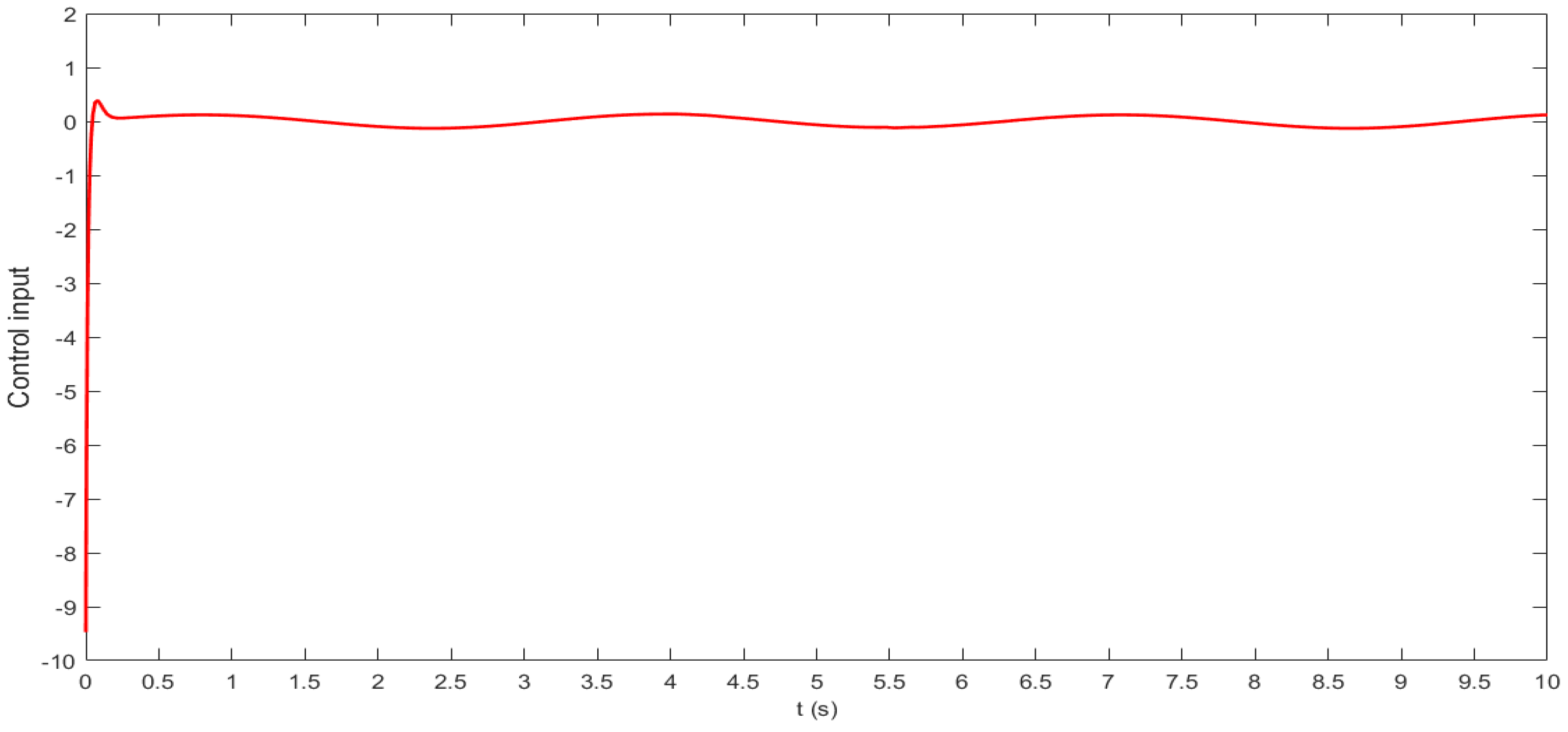
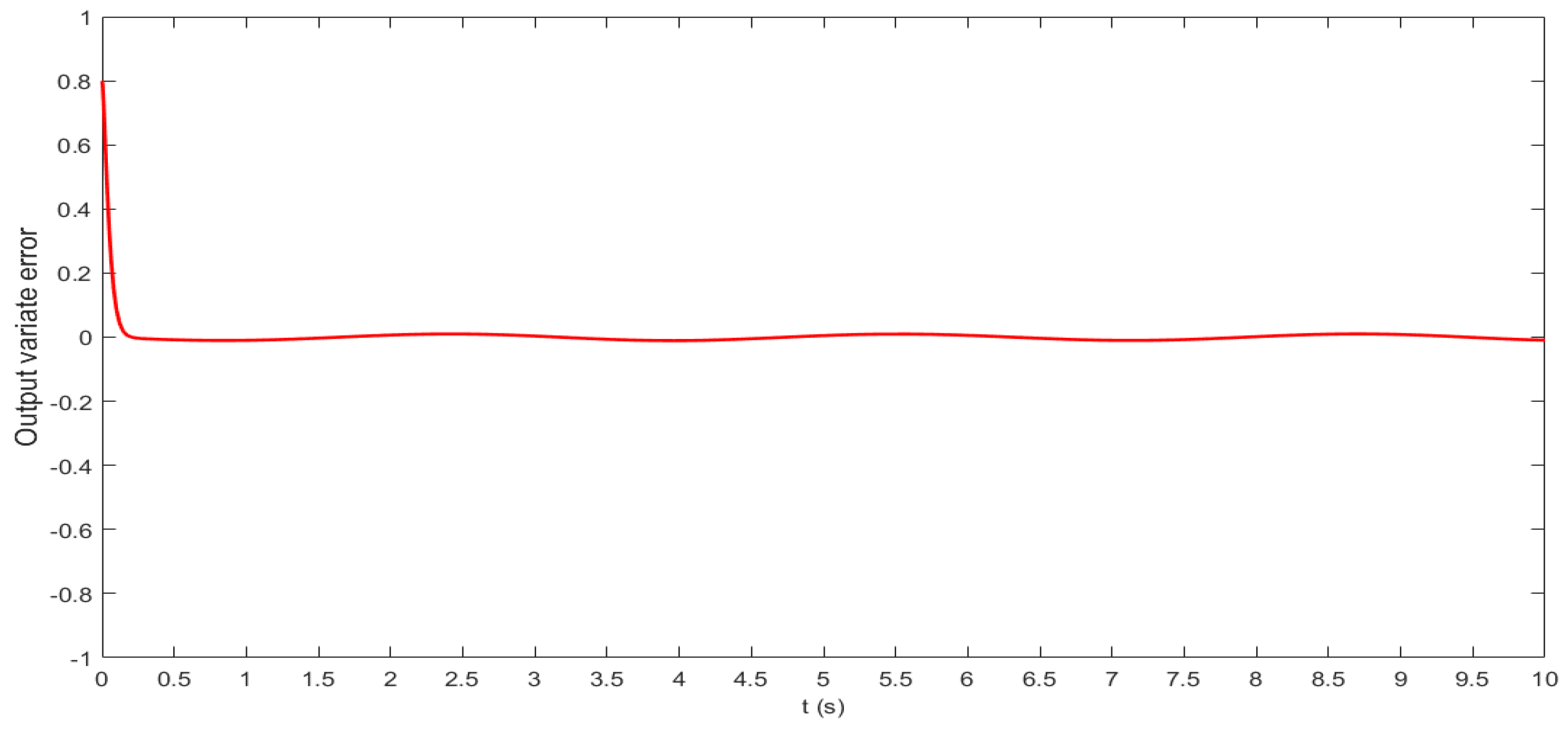
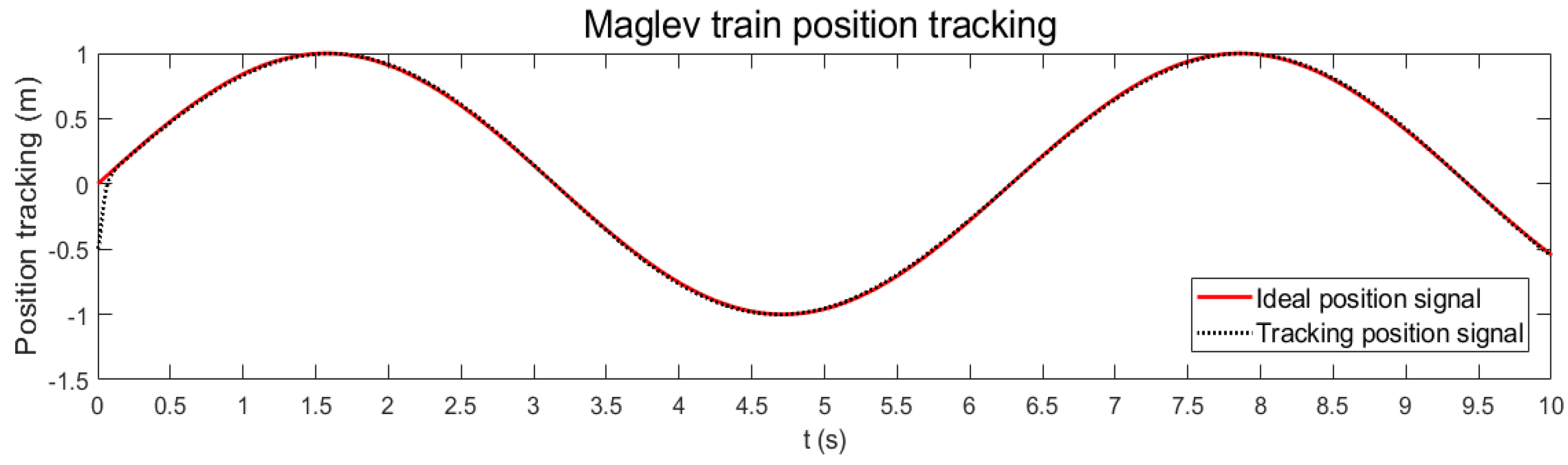
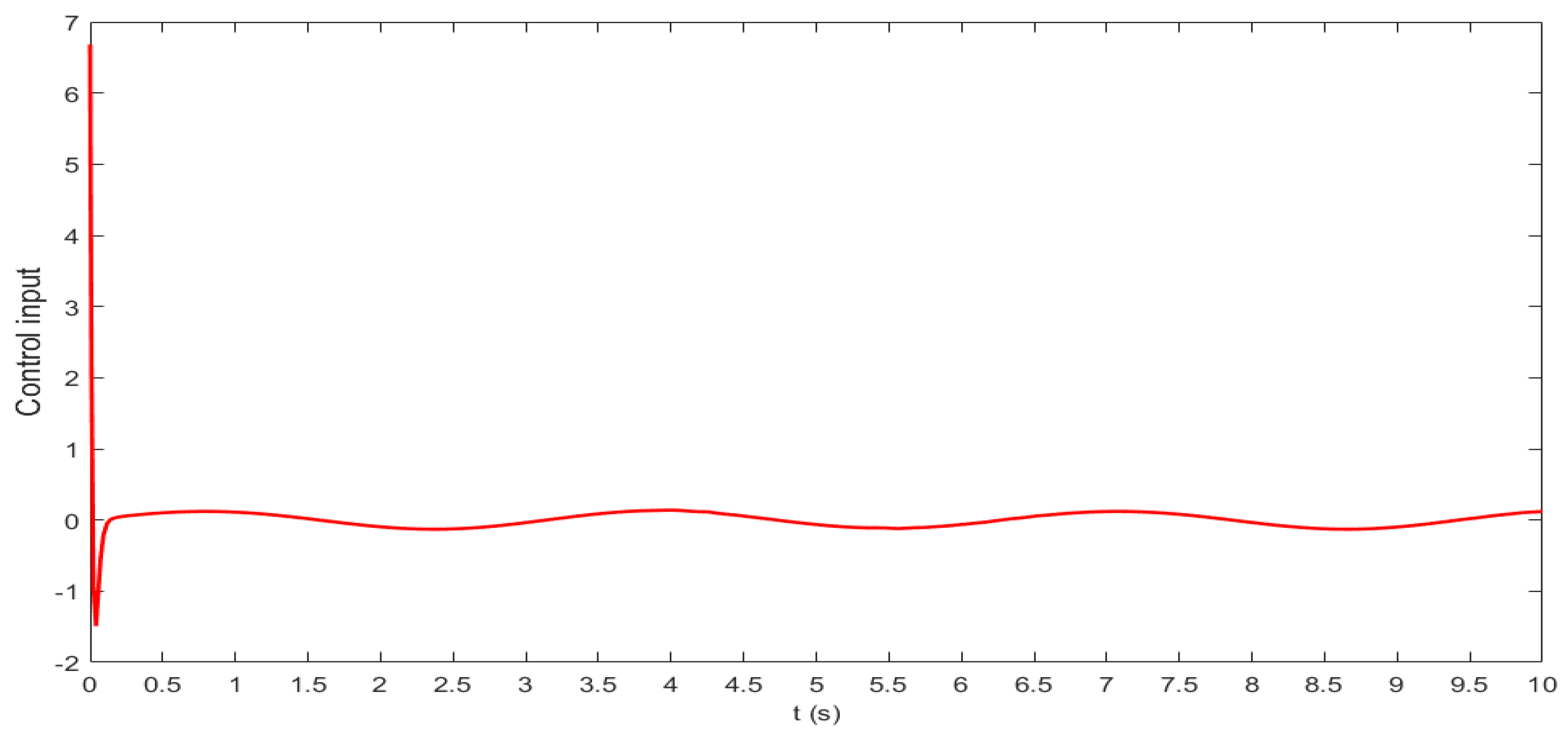
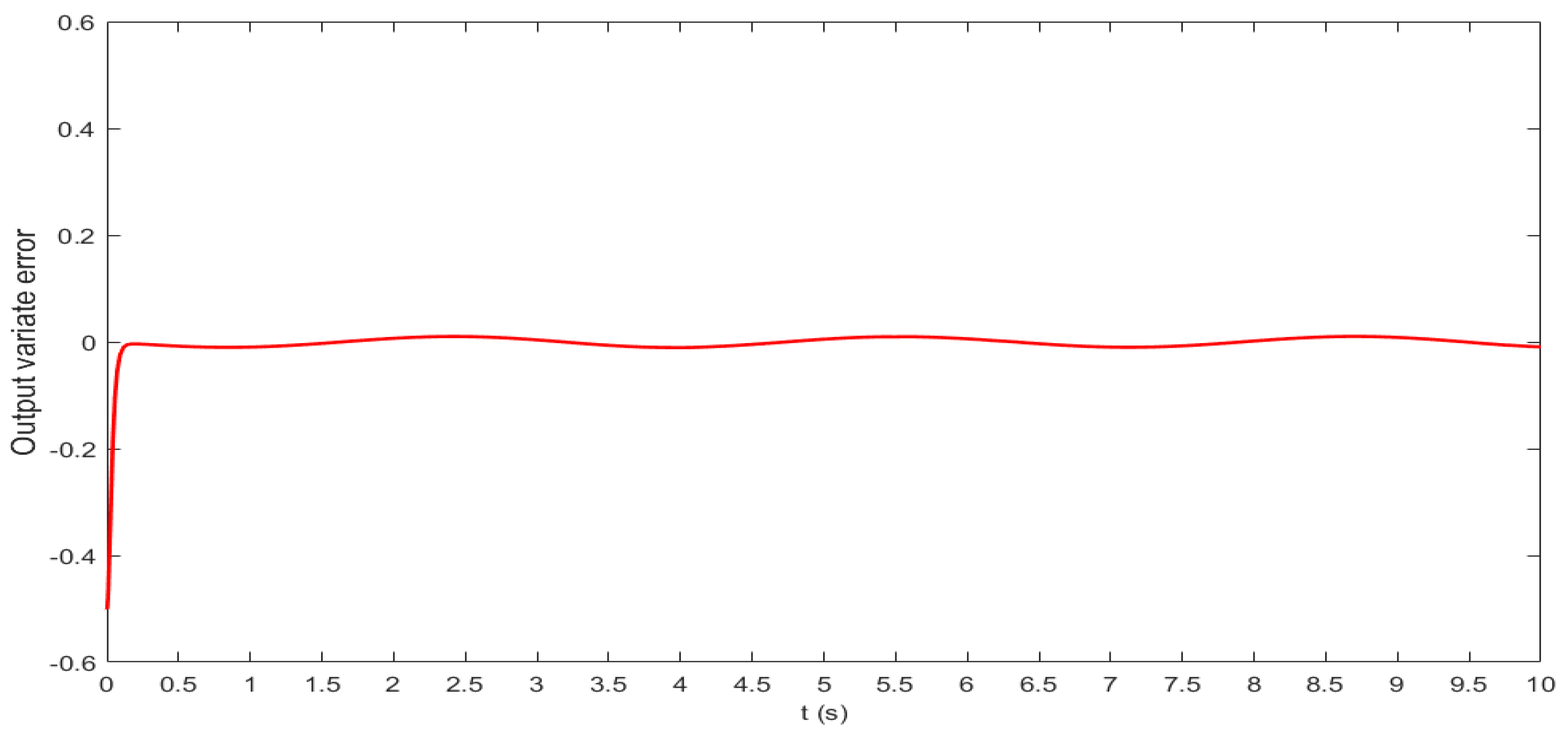
3.3. System Simulation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mao, Z.; Tao, G.; Jiang, B.; Yan, X.G. Adaptive Control Design and Evaluation for Multibody High-Speed Train Dynamic Models. IEEE Trans. Control. Syst. Technol. 2020, 29, 1061–1074. [Google Scholar] [CrossRef]
- Wang, X.; Xiao, Z.; Chen, M.; Sun, P.; Wang, Q.; Feng, X. Energy-Efficient Speed Profile Optimization and Sliding Mode Speed Tracking for Metros. Energies 2020, 13, 6093. [Google Scholar] [CrossRef]
- Liu, Y.; Fan, K.; Ouyang, Q. Intelligent Traction Control Method Based on Model Predictive Fuzzy PID Control and Online Optimization for Permanent Magnetic Maglev Trains. IEEE Access 2021, 9, 29032–29046. [Google Scholar] [CrossRef]
- Pu, Q.; Zhu, X.; Zhang, R.; Liu, J.; Fu, G. Speed Profile Tracking by an Adaptive Controller for Subway Train Based on Neural Network and PID Algorithm. IEEE Trans. Veh. Technol. 2020, 69, 10656–10667. [Google Scholar] [CrossRef]
- Jie, Y.; Jia, L.; Fu, Y.; Lu, S. Speed Tracking Based Energy-Efficient Freight Train Control Through Multi-Algorithms Combination. IEEE Intell. Transp. Syst. Mag. 2017, 9, 76–90. [Google Scholar]
- Chou, M.; Xia, X.; Kayser, C. Modelling and model validation of heavy-haul trains equipped with electronically controlled pneumatic brake systems. Control Eng. Pract. 2007, 15, 501–509. [Google Scholar] [CrossRef]
- Xu, J.; Du, Y.; Chen, Y.H.; Hong, G. Adaptive robust constrained state control for nonlinear maglev vehicle with guaranteed bounded airgap. IET Control Theory Appl. 2018, 12, 1573–1583. [Google Scholar] [CrossRef]
- Sun, Y.; Xu, J.; Qiang, H.; Lin, G. Adaptive Neural-Fuzzy Robust Position Control Scheme for Maglev Train Systems with Experimental Verification. IEEE Trans. Ind. Electron. 2019, 66, 8589–8599. [Google Scholar] [CrossRef]
- Yang, G. Research on Optimal Speed Profile and Tracking Control of High-Speed Maglev Trains. Ph.D. Thesis, Beijing Jiaotong University, Beijing, China, 2007. [Google Scholar]
- Fan, C.; Wu, G.; Hu, G. Characterization of long-stator linear synchronous motors based on state equations. Micro Mot. (Servo Technol.) 2005, 38, 26–28. [Google Scholar] [CrossRef]
- Lu, Q.; Chen, Y.; Ye, Y.; Fan, C. Calculation of reactance and force analysis of long-stator linear synchronous motors. Small Medium-Sized Mot. 2003, 3, 17–22. [Google Scholar]
- Tsunashima, H.; Abe, M. Static and dynamic performance of permanent magnet suspension for maglev transport vehicle. Veh. Syst. Dyn. 1998, 29, 83–111. [Google Scholar] [CrossRef]
- Cui, J. Calculation of Operating Speed Profile of Low and Medium Speed Maglev Trains. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, 2012. [Google Scholar]
- Jiang, Q.L.; Zhang, K.L.; Lian, C.S. Calculation of operating resistance of EMS-type maglev trains. Locomot. Electr. Transm. 1999, 10–12. [Google Scholar]
- Guo, Y.Y. Research on Automatic Driving of High-Speed Trains Based on Fuzzy Predictive Control. Master’s Thesis, Lanzhou Jiaotong University, Lanzhou, China, 2020. [Google Scholar]
- Hou, T.; Guo, Y.; Chen, Y.; Yang, H. Research on speed control of high-speed trains based on multi-mass point model. J. Railw. Sci. Eng. 2020, 2, 314–325. [Google Scholar]
- Wang, L.S. Automatic Driving Predictive Control of High-Speed Trains Based on Multi-Mass Model. Ph.D. Thesis, Beijing Jiaotong University, Beijing, China, 2016. [Google Scholar]
- Liang, X.R.; Xiao, L.; Wang, X.; Yang, S.W.; Dong, H.R. Design of a neural network PID controller for high-speed train speed tracking. Comput. Eng. Appl. 2021, 57, 7. [Google Scholar]
- He, Z.-Y.; Yang, Z.-J.; Lu, J.-Y. Research on iterative learning control method for high-speed trains under constrained conditions. Railw. Stand. Des. 2019, 63, 7. [Google Scholar]
- Chen, W.B.; Wu, X.B.; Pei, Y.R.; Li, J.A. Study on Adaptive PID Control Algorithm Based on RBF Neural Network. In Proceedings of the 3rd International Conference on Computational Intelligence and Industrial Application (PACIIA2010), Wuhan, China, 4–5 December 2010; pp. 341–344. [Google Scholar]
- Wang, X.Y.; Zhang, Z.K. Research of RBF Neural Networks Algorithm to Fault Diagnosis of Rotary Machinery. In Proceedings of the IITA International Conference on Control, Automation and Systems Engineering, Zhangjiajie, China, 11–12 July 2009; pp. 331–334. [Google Scholar]
- Chen, W.B.; Wu, X.B.; Pei, Y.R.; Li, J.A. Study on Adaptive PID Control Algorithm Based on RBF Neural Netwoik. In Proceedings of the International Conference on Intelligent Computation and Industrial Application (ICIA2011), Hong Kong, China, 18–19 June 2011; pp. 337–340. [Google Scholar]
- Yue, C.; Song, J. Application of Combination Model Based on RBF Neural Network in GPS Elevation Fitting. J. Geomat. 2020, 45, 20–22. [Google Scholar] [CrossRef]
- Liu, J.K. RBF Neural Network Adaptive Control MATLAB Simulation, 2nd ed.; Tsinghua University Press: Beijing, China, 2018. [Google Scholar]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier Lyapunov Functions for the control of output-constrained nonlinear systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]
- Ren, B.; Ge, S.S.; Tee, K.P.; Lee, T.H. Adaptive Neural Control for Output Feedback Nonlinear Systems Using a Barrier Lyapunov Function. IEEE Trans. Neural Netw. 2010, 21, 1339–1345. [Google Scholar] [PubMed]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, H.; Wang, H.; Yu, C.; Zhao, J. Displacement-Constrained Neural Network Control of Maglev Trains Based on a Multi-Mass-Point Model. Energies 2022, 15, 3110. https://doi.org/10.3390/en15093110
Pan H, Wang H, Yu C, Zhao J. Displacement-Constrained Neural Network Control of Maglev Trains Based on a Multi-Mass-Point Model. Energies. 2022; 15(9):3110. https://doi.org/10.3390/en15093110
Chicago/Turabian StylePan, Hongliang, Hao Wang, Chenglong Yu, and Junjie Zhao. 2022. "Displacement-Constrained Neural Network Control of Maglev Trains Based on a Multi-Mass-Point Model" Energies 15, no. 9: 3110. https://doi.org/10.3390/en15093110
APA StylePan, H., Wang, H., Yu, C., & Zhao, J. (2022). Displacement-Constrained Neural Network Control of Maglev Trains Based on a Multi-Mass-Point Model. Energies, 15(9), 3110. https://doi.org/10.3390/en15093110