
Side Fins Performance in Biomimetic Unmanned Underwater Vehicle


Abstract
:1. Introduction
2. Mathematical Relations
- (1)
- K—the non-dimensional parameter defining the shape of the fin—herein different lengths, widths, and thicknesses are tested for rectangular shapes;
- (2)
- —the fin angle of attack—after preliminary tests, the paper presents results for only one angle of attack;
- (3)
- (4)
- (5)
- —the Strouhal number [33,39] depicted in Equation (4) describes how fast the fin is flapping relative to BUUV forward speed.where:
- A—amplitude measured at the trailing edge of the fin;
- f—the frequency of oscillation of the fins.
- —the net thrust;
- T—the thrust;
- —the drag force.
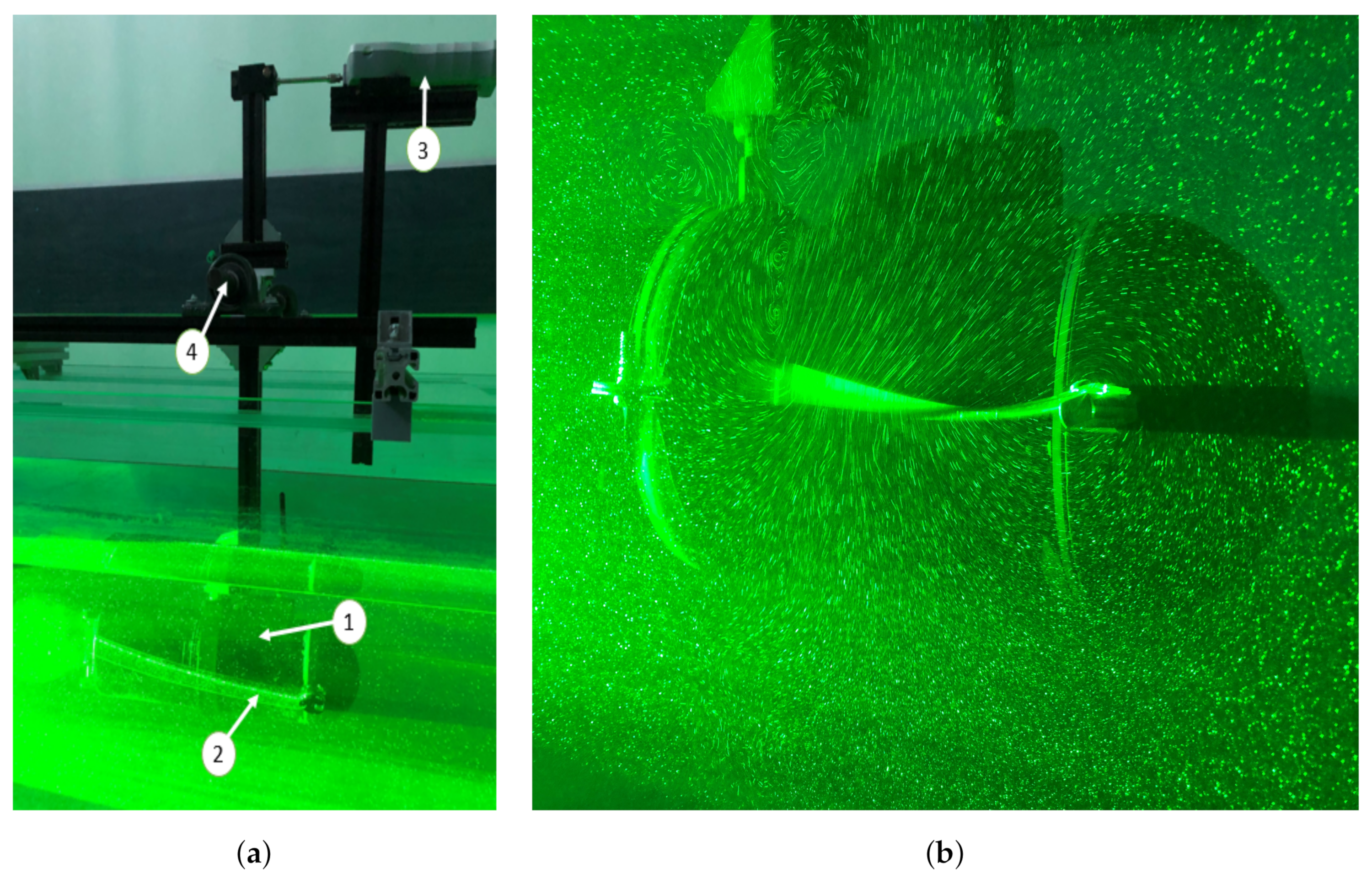
3. Laboratory Test Equipment and Measurement Methods
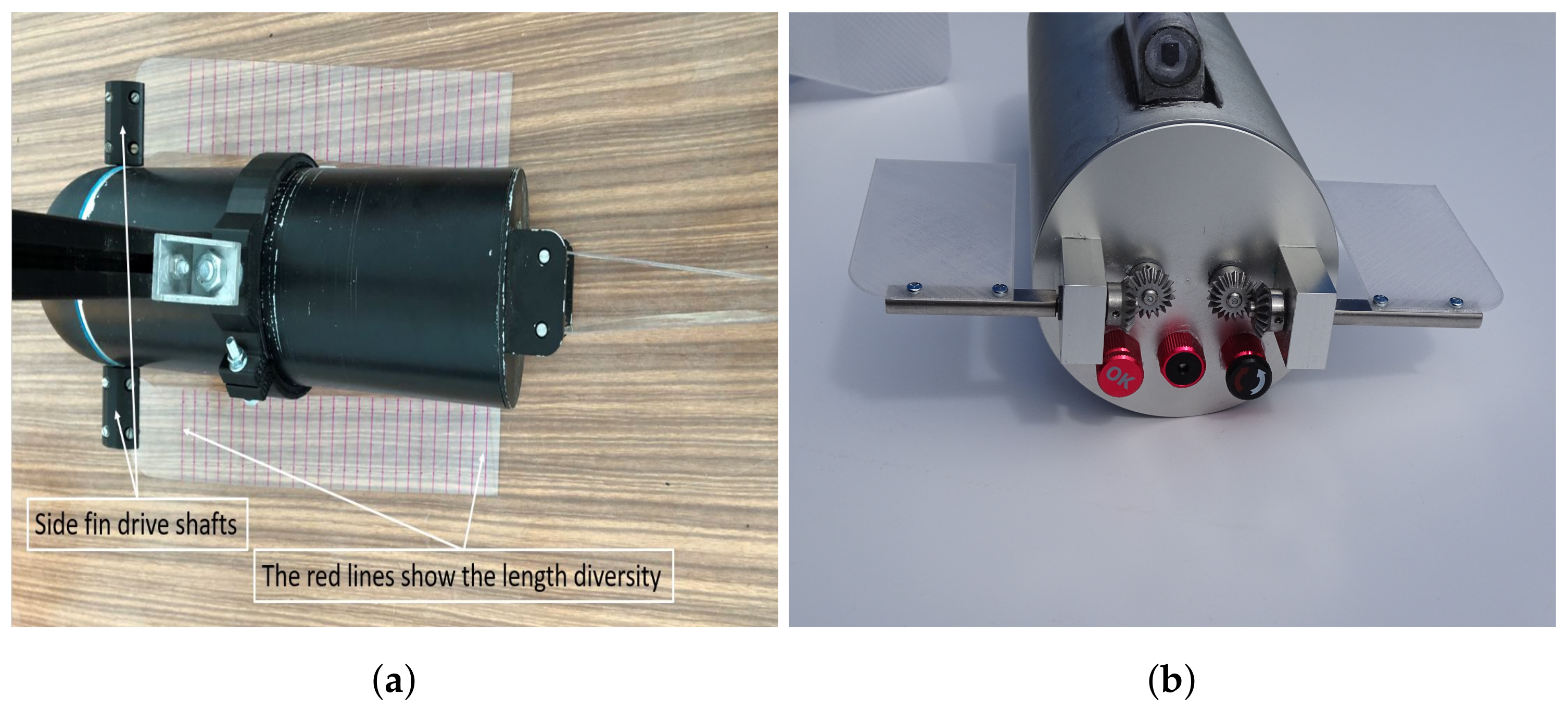
3.1. The Side Fins Construction and Control Algorithm
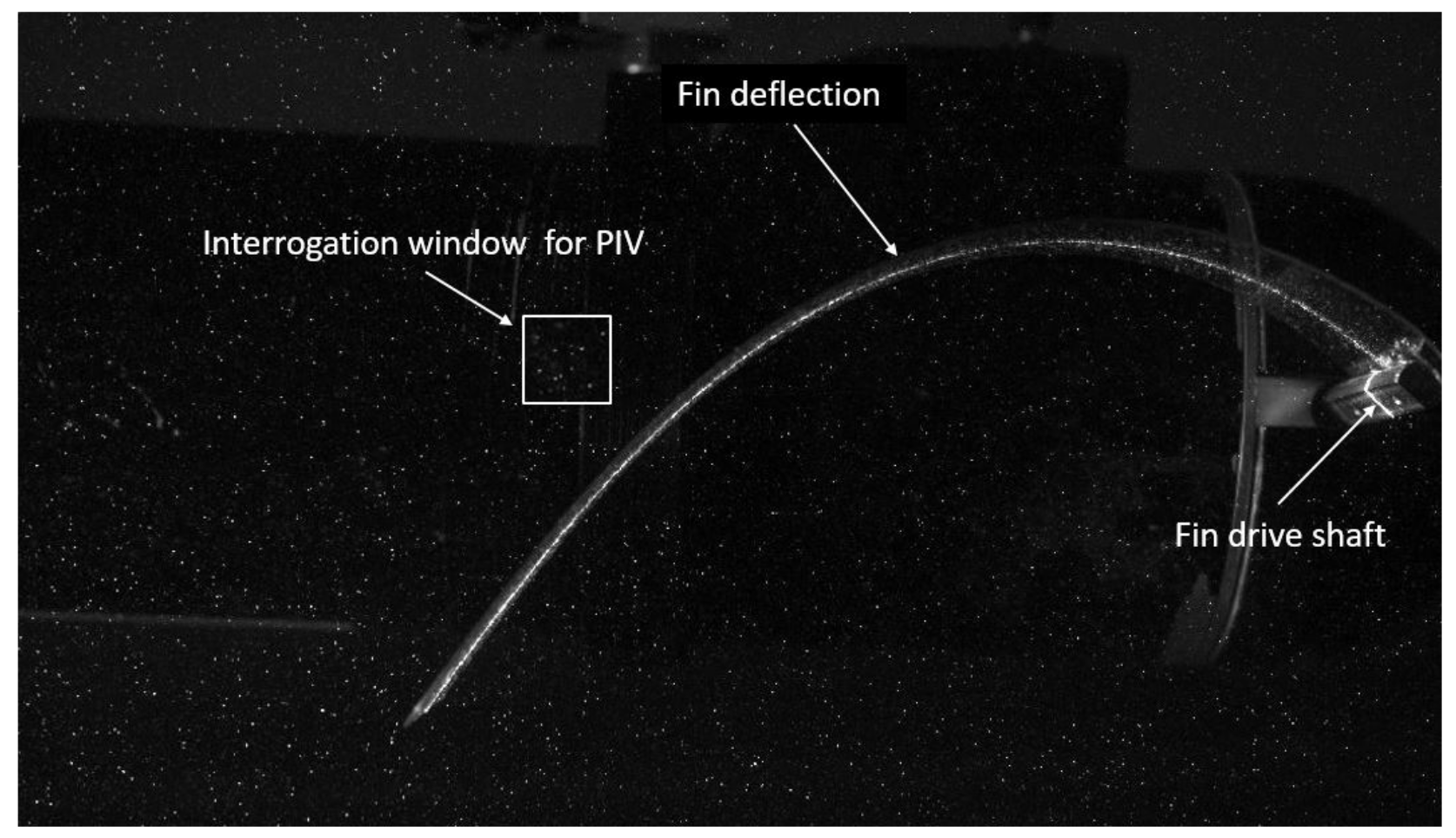
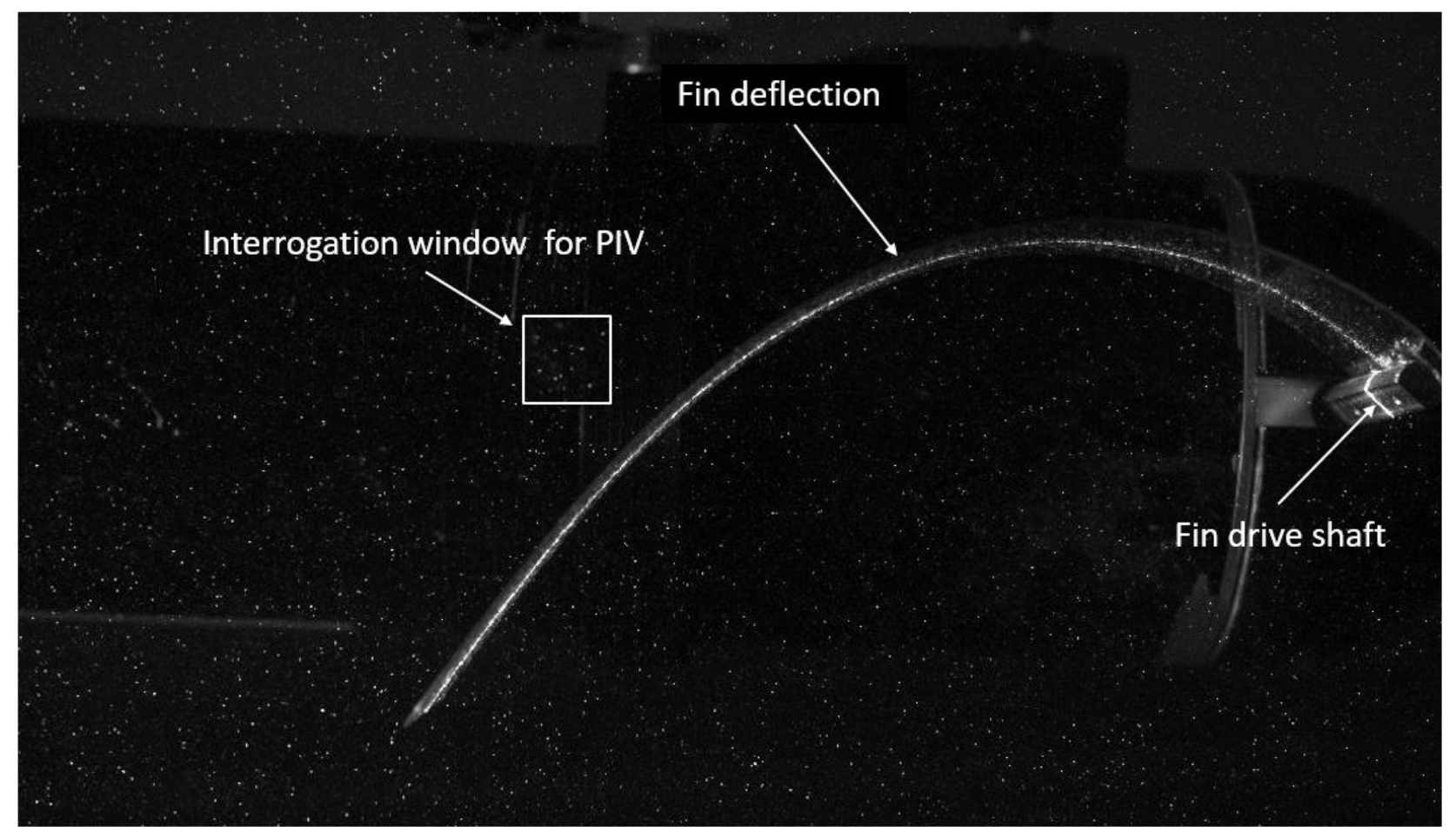
3.2. Image Processing Method
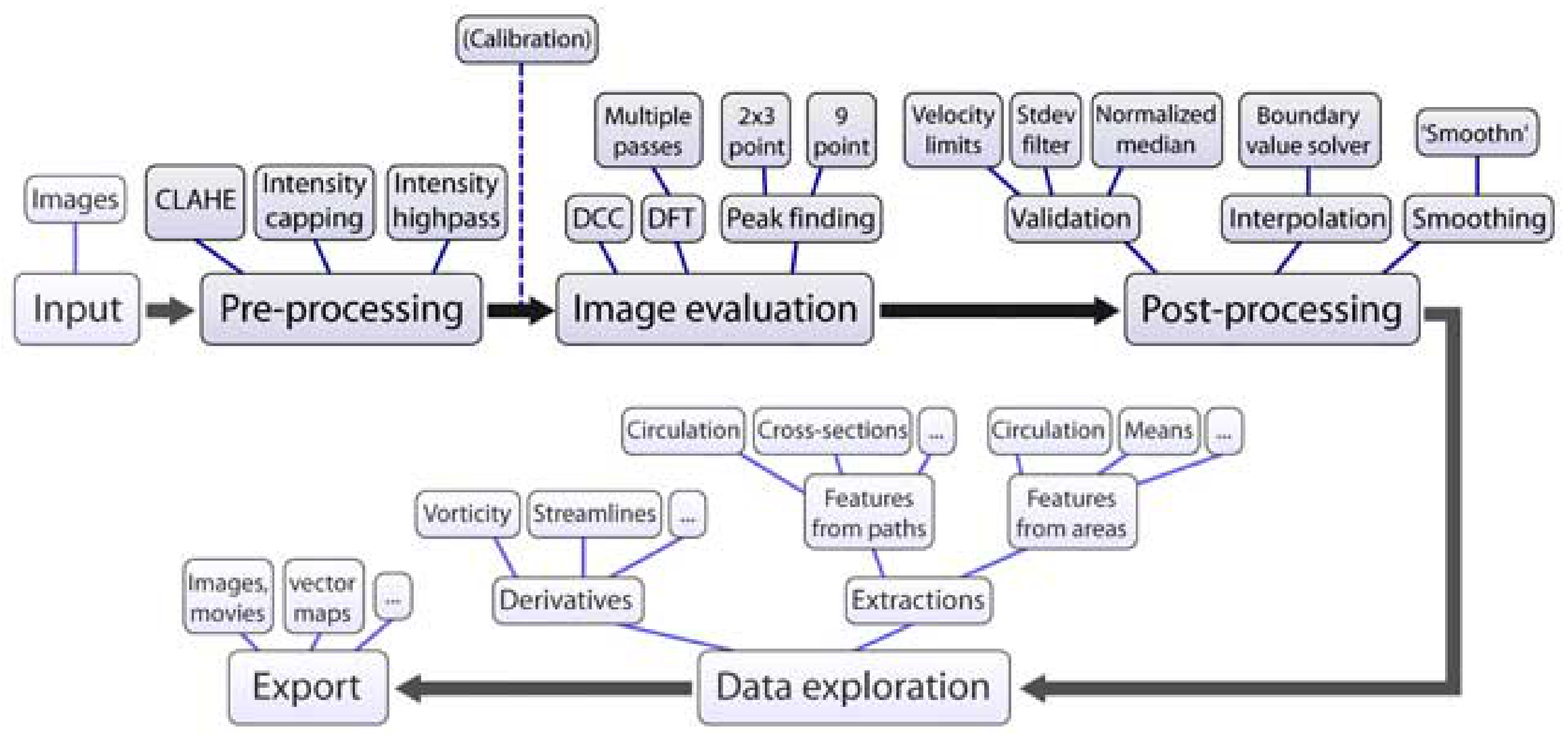
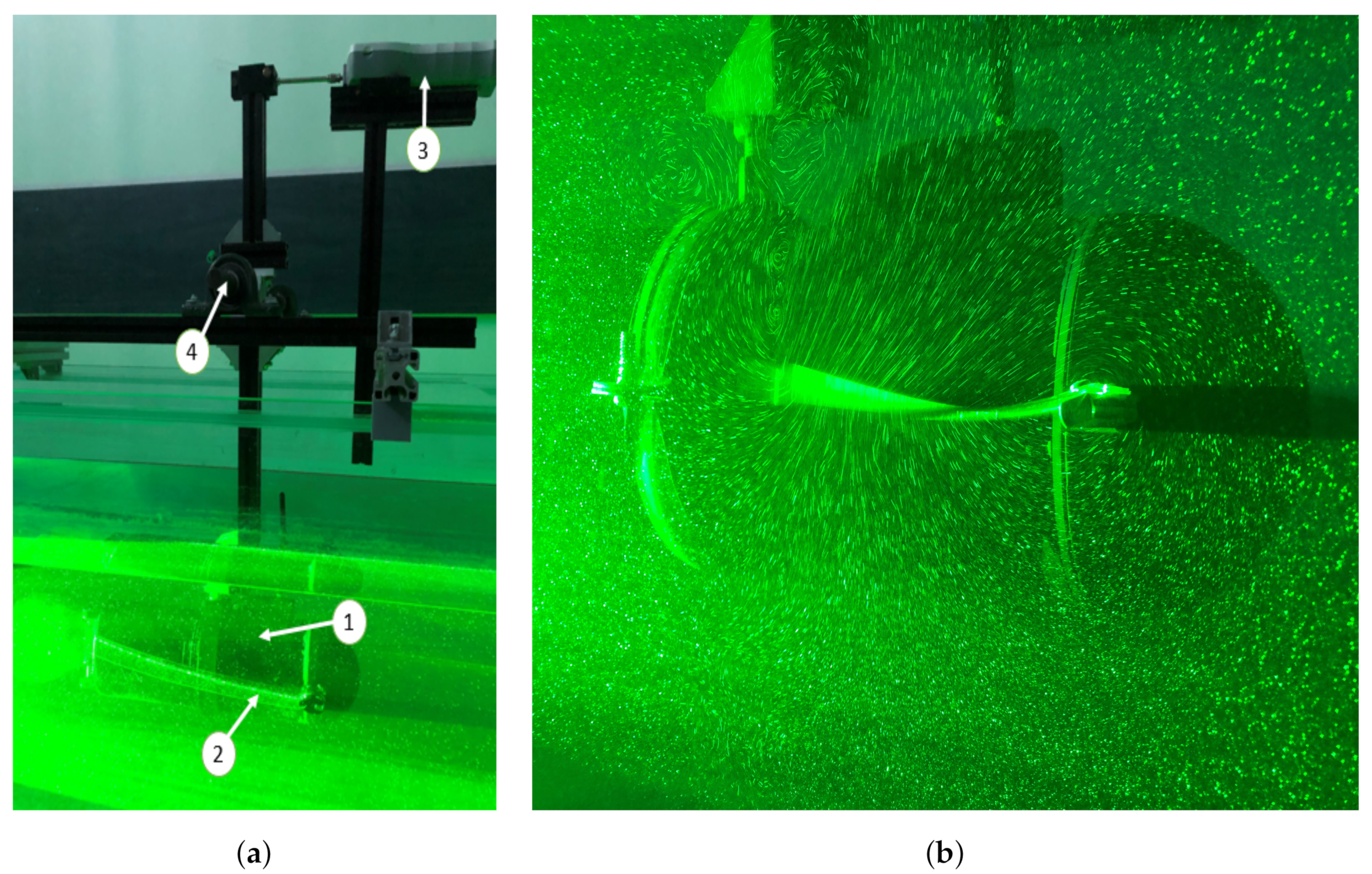
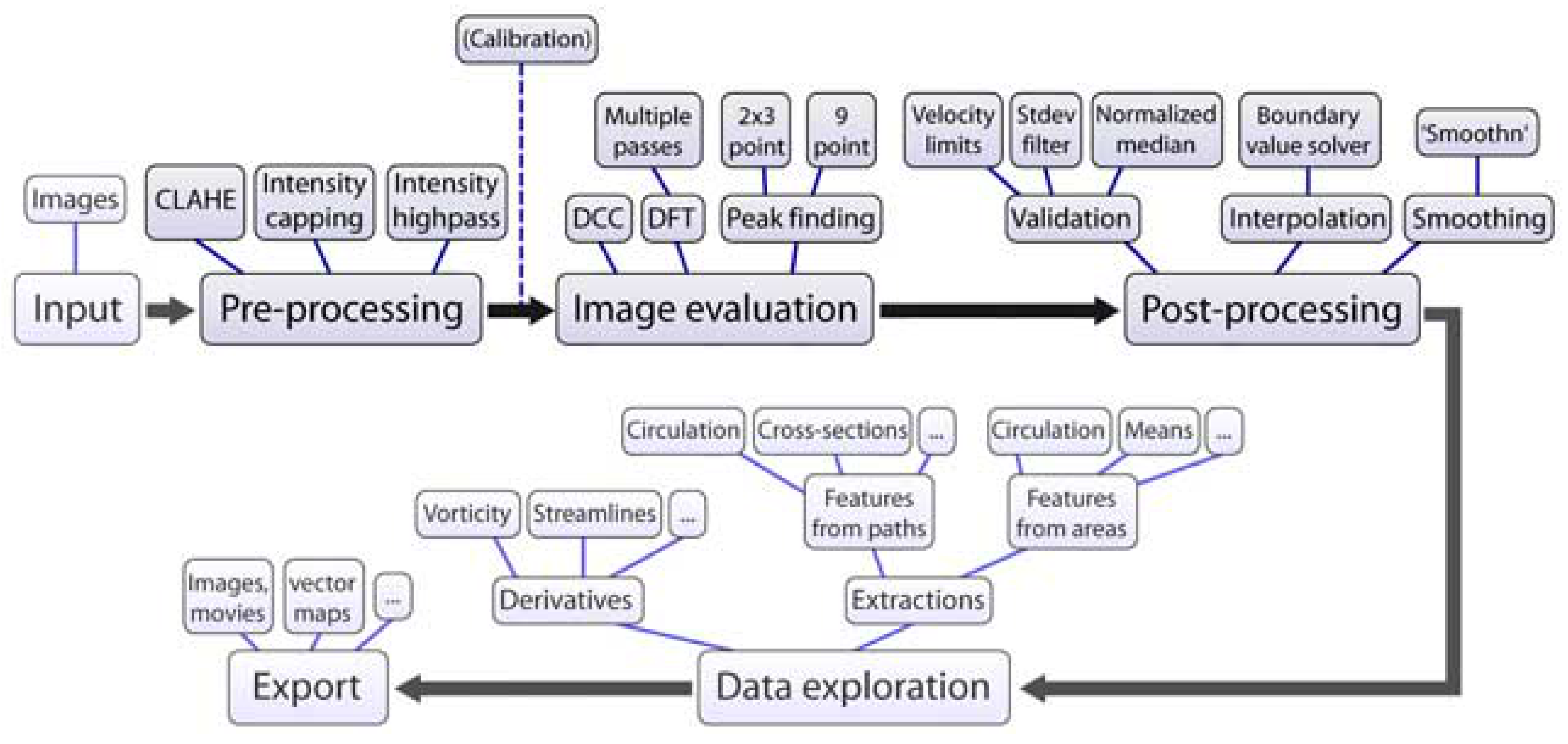
3.3. PIV Method
4. Results and Discussion
4.1. Kinematic Parameters Based on Image Processing
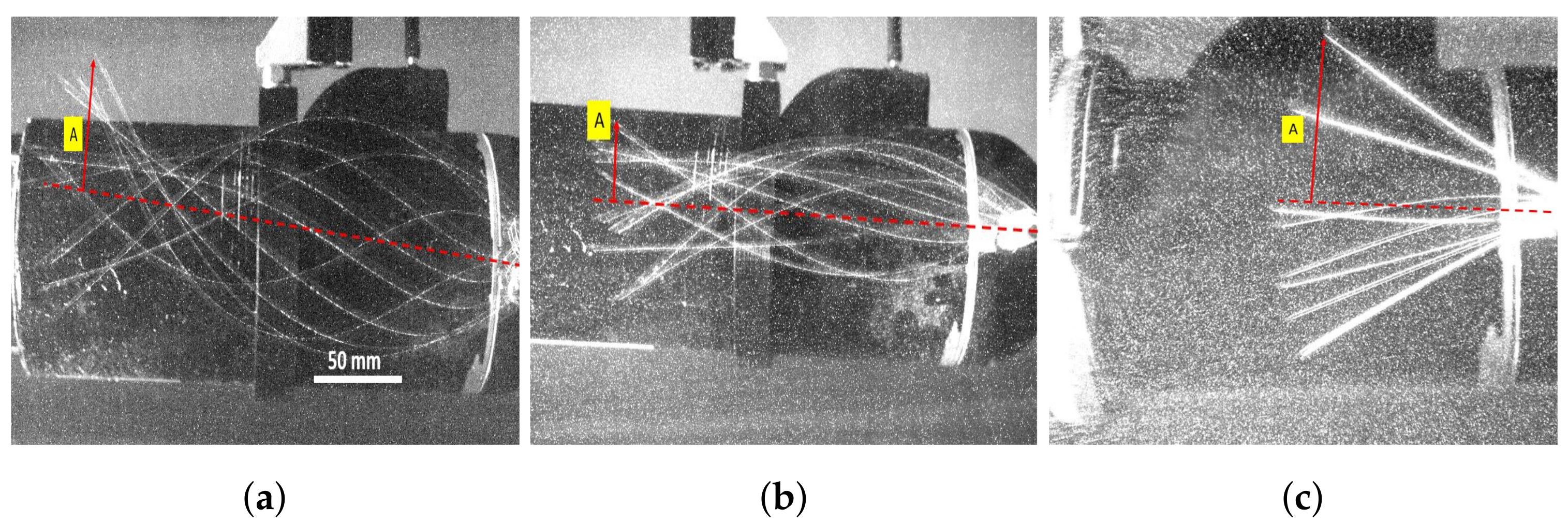
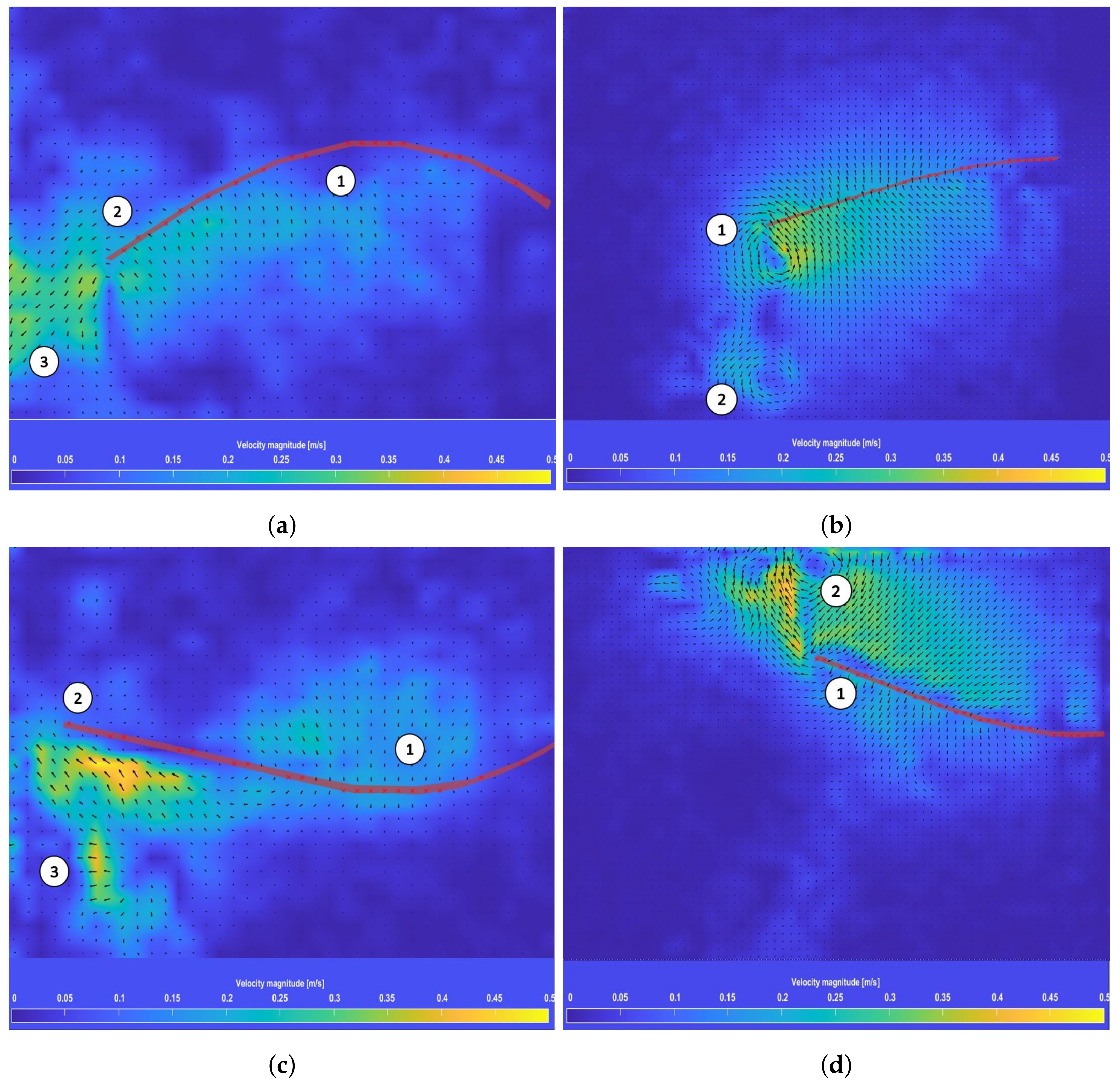
4.2. PIV Results
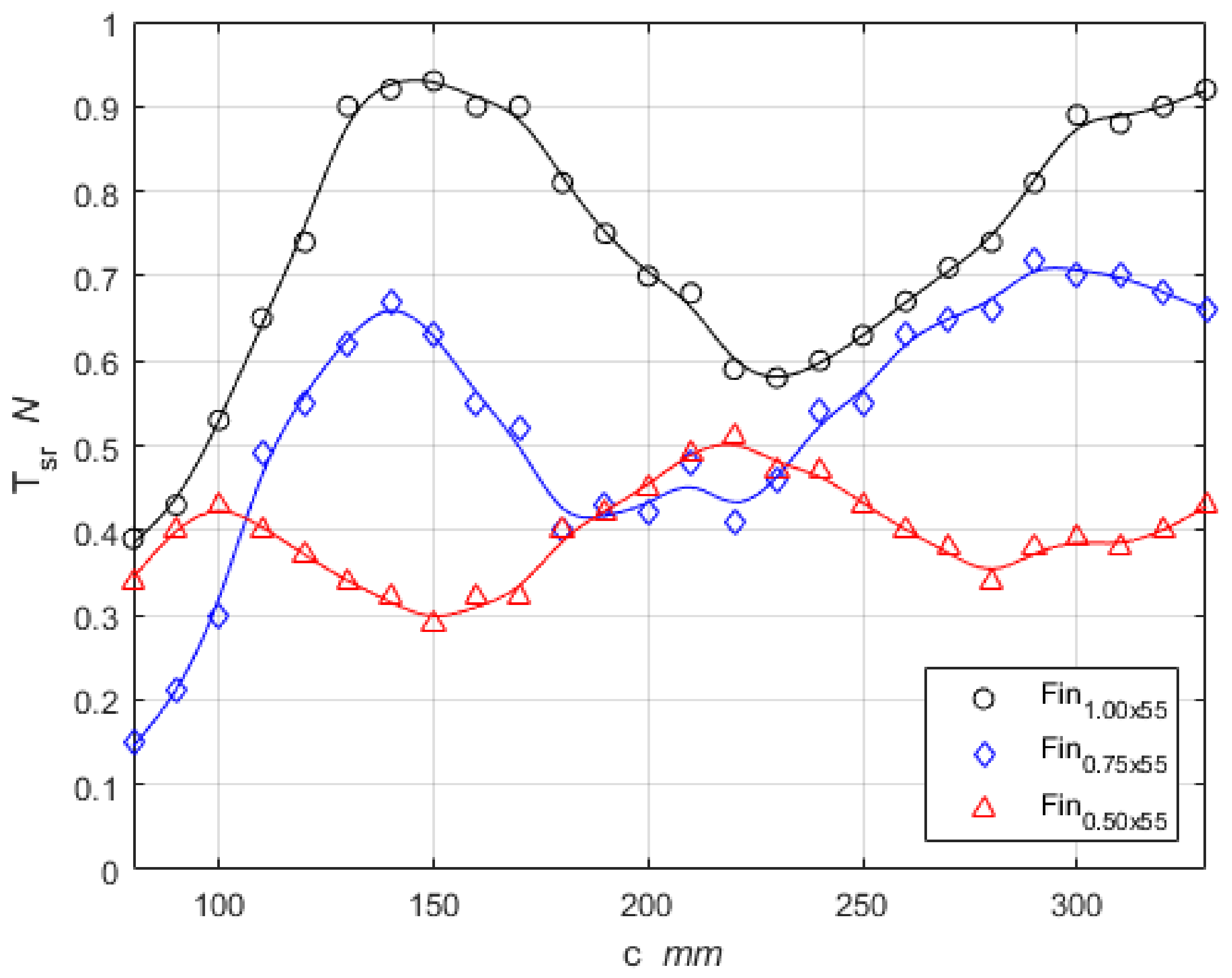
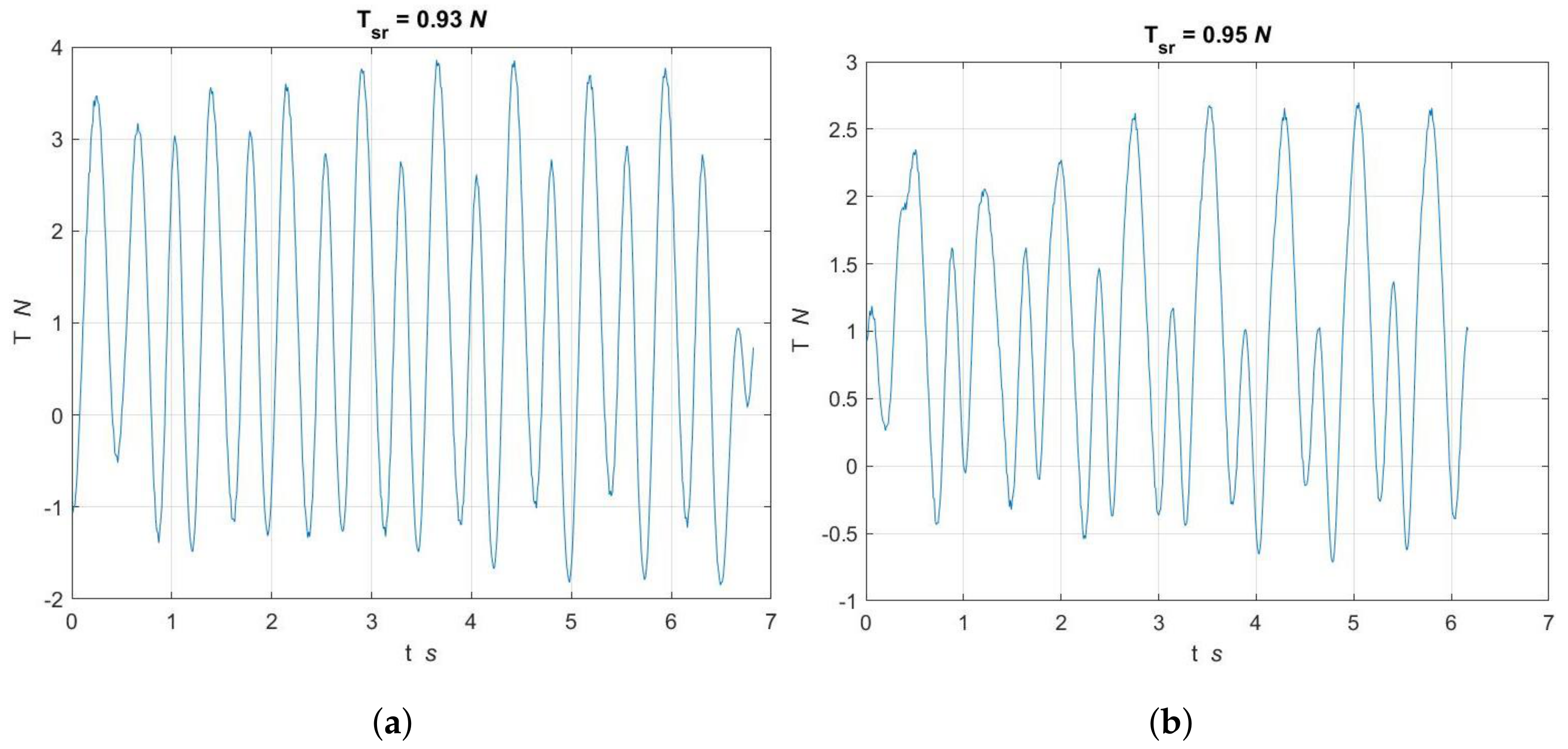
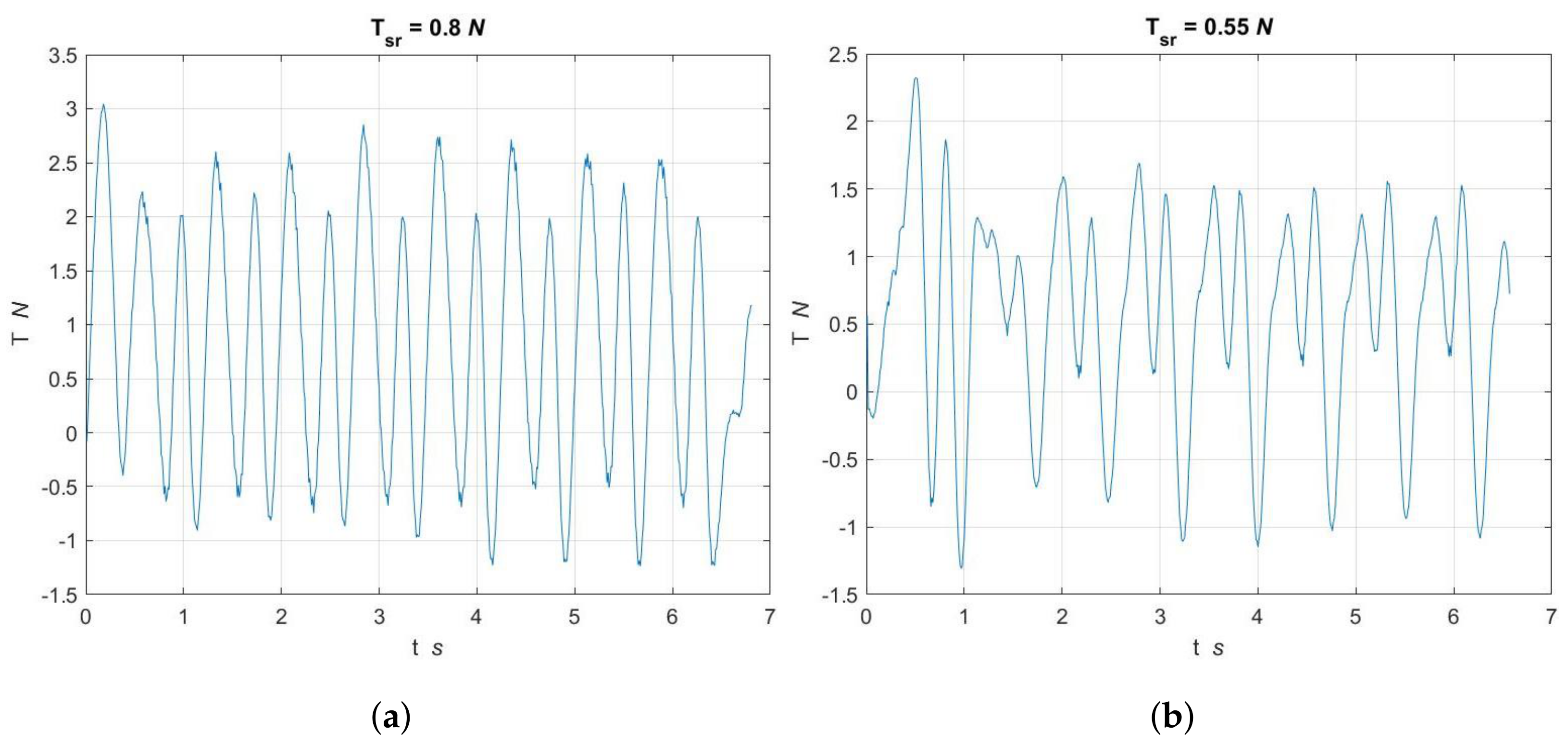
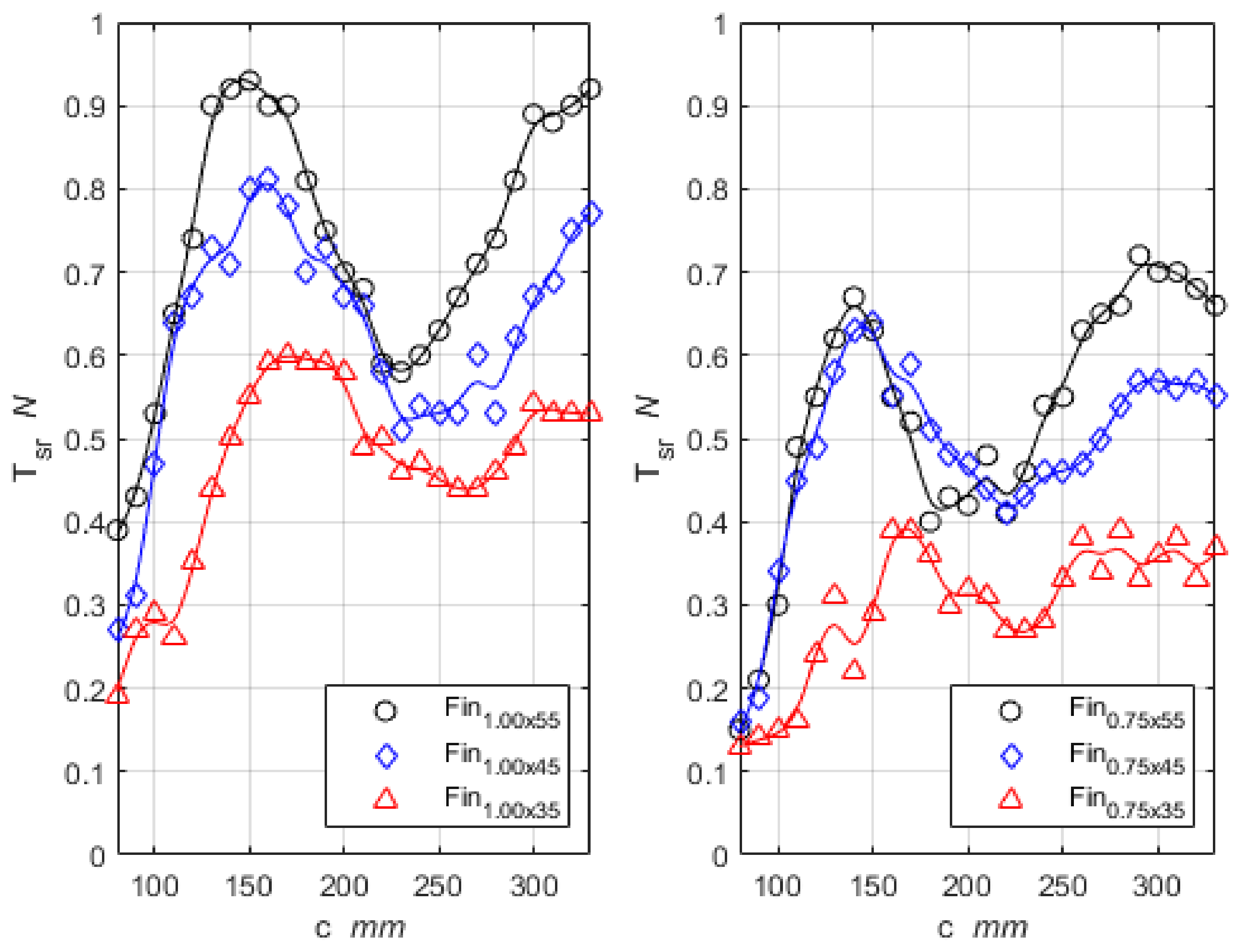
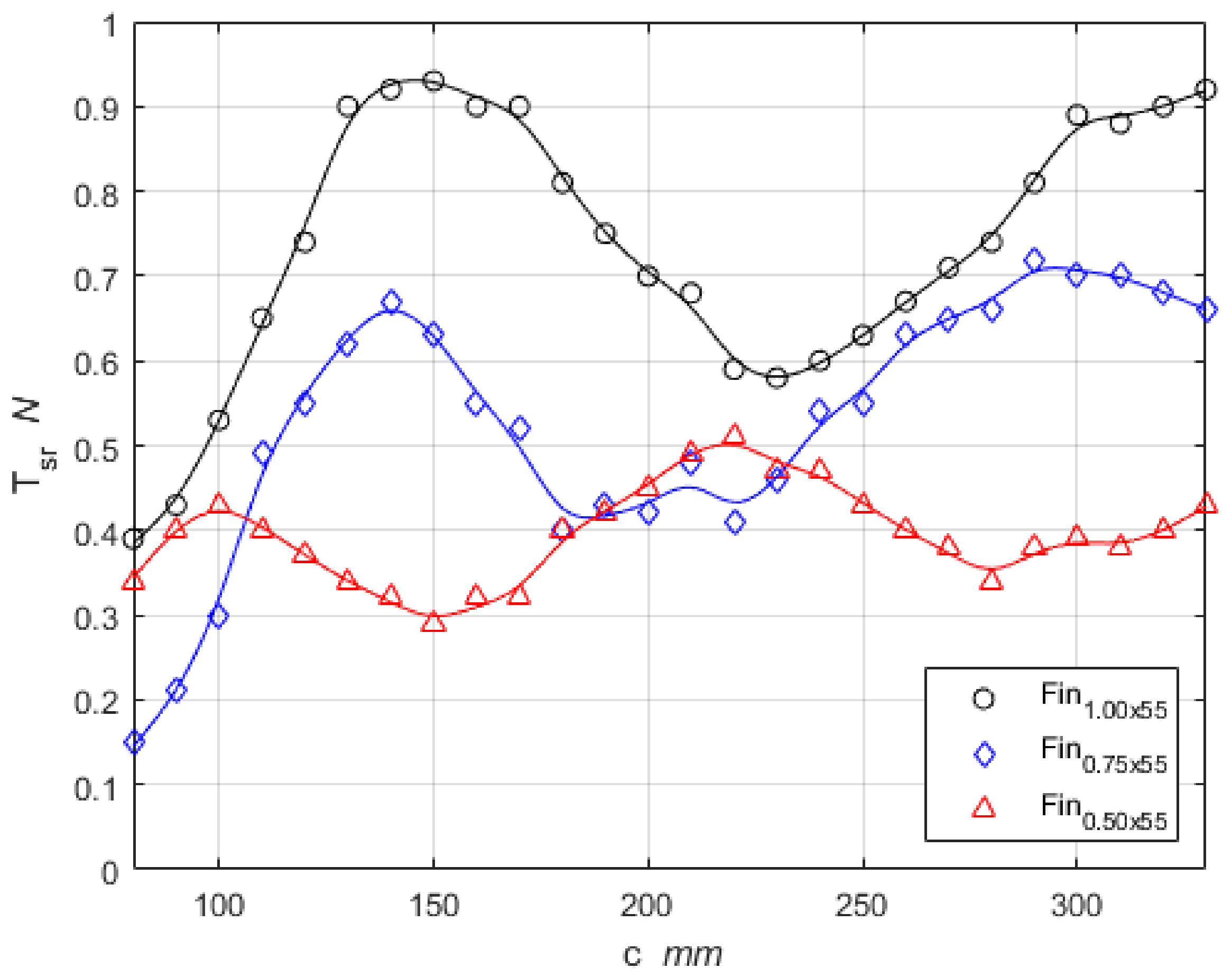
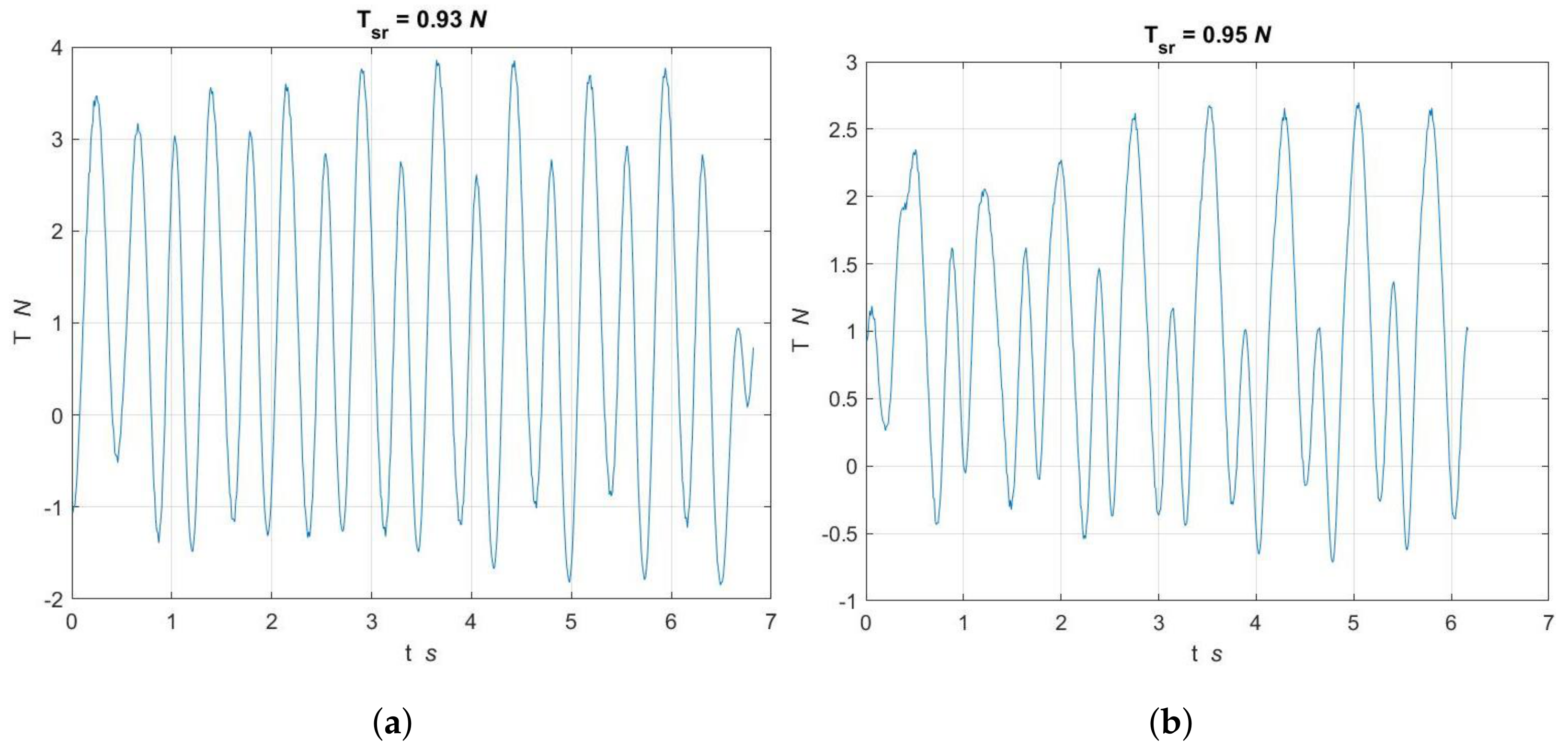
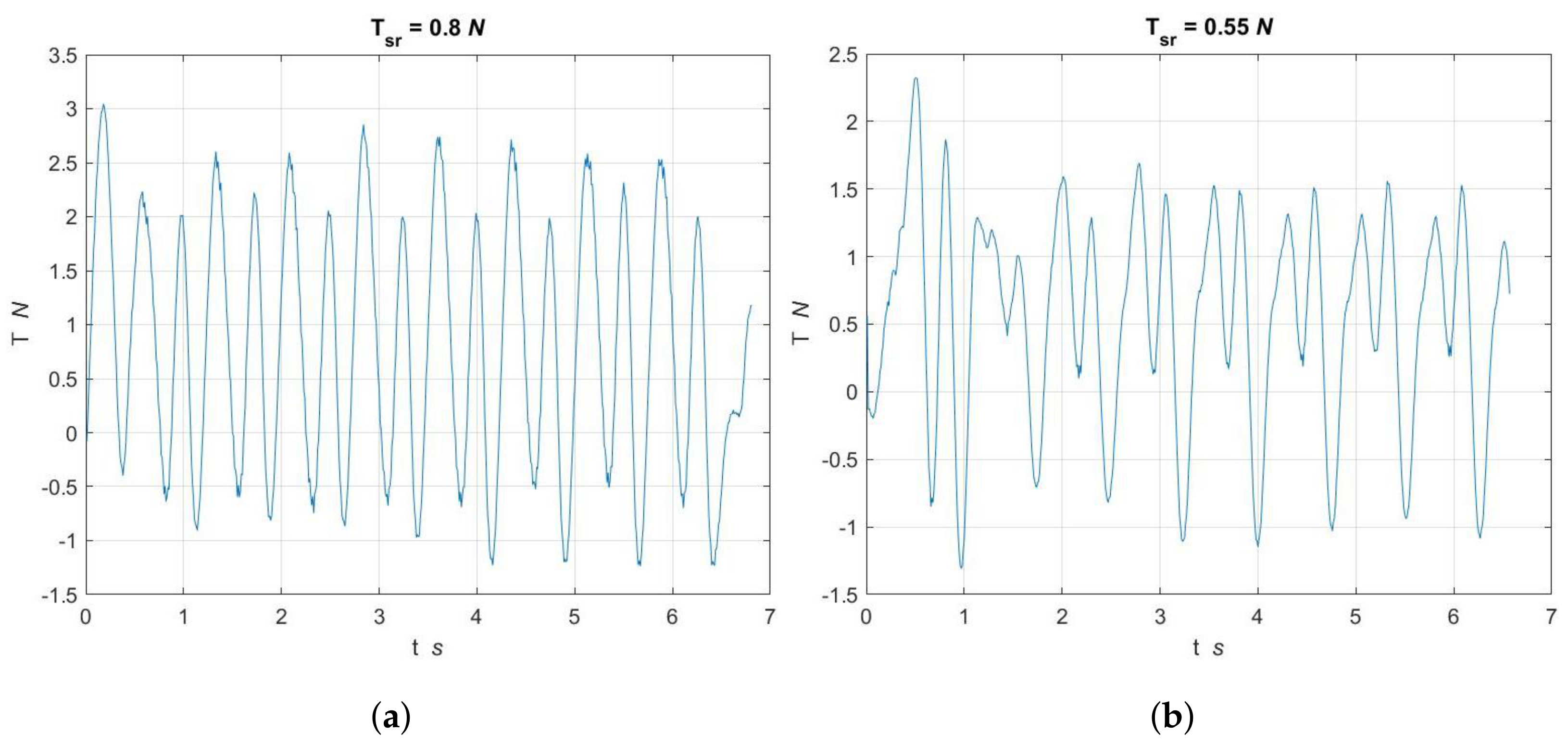
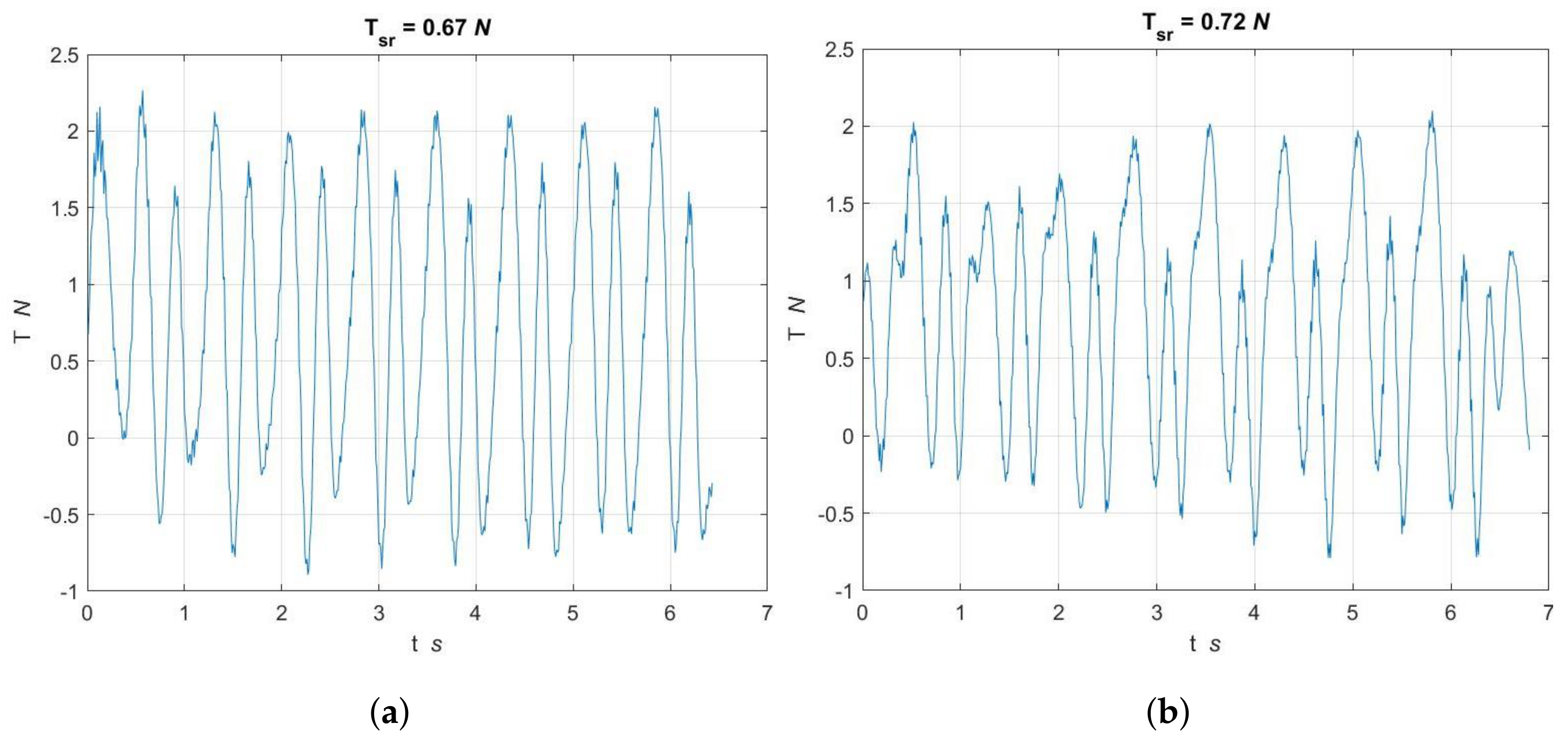
4.3. Direct Thrust Measurements
5. Conclusions and Future Work
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| BUUV | Biomimetic Unmanned Underwater Vehicle |
| PIV | Particle Image Velocimetry |
| RPM | Revolutions Per Minute |
| FSI | Fluid–Structure Interaction. |
References
- Mannam, N.P.B.; Krishnankutty, P. Biological Propulsion Systems for Ships and Underwater Vehicles. In Propulsion Systems; IntechOpen: London, UK, 2019; p. 113. [Google Scholar] [CrossRef] [Green Version]
- He, J.; Cao, Y.; Huang, Q.; Pan, G.; Dong, X.; Cao, Y. Effects of Bionic Pectoral Fin Rays’ Spanwise Flexibility on Forwarding Propulsion Performance. J. Mar. Sci. Eng. 2022, 10, 783. [Google Scholar] [CrossRef]
- Sitorus, P.E.; Nazaruddin, Y.Y.; Leksono, E.; Budiyono, A. Design and Implementation of Paired Pectoral Fins Locomotion of Labriform Fish Applied to a Fish Robot. J. Bionic Eng. 2009, 6, 37–45. [Google Scholar] [CrossRef]
- Shi, L.; Guo, S.; Mao, S.; Yue, C.; Li, M.; Asaka, K. Development of an Amphibious Turtle-Inspired Spherical Mother Robot. J. Bionic Eng. 2013, 10, 446–455. [Google Scholar] [CrossRef]
- Szymak, P.; Przybylski, M. Thrust measurement of biomimetic underwater vehicle with undulating propulsion. Sci. J. Pol. Nav. Acad. 2018, 213, 69–82. [Google Scholar] [CrossRef]
- Salazar, R.; Quintana, R.; Abdelkefi, A. Role of Electromechanical Coupling, Locomotion Type and Damping on the Effectiveness of Fish-Like Robot Energy Harvesters. Energies 2021, 14, 693. [Google Scholar] [CrossRef]
- Morawski, M.; Słota, A.; Zając, J.; Malec, M. Fish-like shaped robot for underwater surveillance and reconnaissance–Hull design and study of drag and noise. Ocean Eng. 2020, 217, 107889. [Google Scholar] [CrossRef]
- Liu, G.; Dong, H. Effects of tail geometries on the performance and wake pattern in flapping propulsion. In Proceedings of the ASME 2016 Fluids Engineering Division Summer Meeting collocated with the ASME 2016 Heat Transfer Summer Conference and the ASME 2016 14th International Conference on Nanochannels, Microchannels, and Minichannels, Washington, DC, USA, 10–14 July 2016; Volume 50299, p. V01BT30A002. [Google Scholar] [CrossRef] [Green Version]
- Malec, M.; Morawski, M.; Zając, J. Fish-like swimming prototype of mobile underwater robot. J. Autom. Mob. Robot. Intell. Syst. 2010, 4, 25–30. [Google Scholar]
- Morawski, M.; Malec, M.; Szymak, P.; Trzmiel, A. Analysis of Parameters of Traveling Wave Impact on the Speed of Biomimetic Underwater Vehicle. In Solid State Phenomena; Trans Tech Publications: Freienbach, Switzerland, 2014; Volume 210, pp. 273–279. [Google Scholar]
- Szymak, P.; Malec, M.; Morawski, M. Directions of development of underwater vehicle with undulating propulsion. Pol. J. Environ. Stud. 2010, 19, 107–110. [Google Scholar]
- Przybylski, M.; Szymak, P.; Kitowski, Z.; Piskur, P. Comparison of Different Course Controllers of Biomimetic Underwater Vehicle with Two Tail Fins. In Advanced, Contemporary Control; Springer: Berlin/Heidelberg, Germany, 2020; pp. 1507–1518. [Google Scholar]
- Hożyń, S.; Zalewski, J. Shoreline Detection and Land Segmentation for Autonomous Surface Vehicle Navigation with the Use of an Optical System. Sensors 2020, 20, 2799. [Google Scholar] [CrossRef]
- Hożyń, S. A Review of Underwater Mine Detection and Classification in Sonar Imagery. Electronics 2021, 10, 2943. [Google Scholar] [CrossRef]
- Jaskolski, K. Methodology for Verifying the Indication Correctness of a Vessel Compass Based on the Spectral Analysis of Heading Errors and Reliability Theory. Sensors 2022, 22, 2530. [Google Scholar] [CrossRef] [PubMed]
- Szymak, P.; Praczyk, T.; Pietrukaniec, L.; Hożyń, S. Laboratory stand for research on mini CyberSeal. Meas. Autom. Monit. 2017, 63, 228–233. [Google Scholar]
- Tytell, E.D.; Hsu, C.Y.; Williams, T.L.; Cohen, A.H.; Fauci, L.J. Interactions between internal forces, body stiffness, and fluid environment in a neuromechanical model of lamprey swimming. Proc. Natl. Acad. Sci. USA 2010, 107, 19832–19837. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hozyn, S. An Automated System for Analysing Swim-Fins Efficiency. Nase More 2020, 67, 10–17. [Google Scholar] [CrossRef]
- Grzadziela, A.; Szymak, P.; Piskur, P. Method for assessing the dynamics and efficiency of diving fins. Acta Bioeng. Biomech. 2020, 22, 139–150. [Google Scholar] [CrossRef] [PubMed]
- Grządziela, A.; Kluczyk, M.; Batur, T. The Stand for Fin Drives Energy Testing. Pedagogica 2021, 93, 250–262. [Google Scholar] [CrossRef]
- Blondeaux, P.; Fornarelli, F.; Guglielmini, L.; Triantafyllou, M.; Verzicco, R. Vortex structures generated by a finite-span oscillating foil. In Proceedings of the 43rd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 10–13 January 2005; p. 84. [Google Scholar] [CrossRef]
- Piskur, P.; Szymak, P.; Kitowski, Z.; Flis, L. Influence of fin’s material capabilities on the propulsion system of biomimetic underwater vehicle. Pol. Marit. Res. 2020, 179–185. [Google Scholar] [CrossRef]
- Matta, A.; Pendar, H.; Battaglia, F.; Bayandor, J. Impact of caudal fin shape on thrust production of a Thunniform swimmer. J. Bionic Eng. 2020, 17, 254–269. [Google Scholar] [CrossRef]
- Piskur, P.; Szymak, P.; Przybylski, M.; Naus, K.; Jaskólski, K.; Żokowski, M. Innovative energy-saving propulsion system for low-speed biomimetic underwater vehicles. Energies 2021, 14, 8418. [Google Scholar] [CrossRef]
- Thekkethil, N.; Sharma, A.; Agrawal, A. Self-propulsion of fishes-like undulating hydrofoil: A unified kinematics based unsteady hydrodynamics study. J. Fluids Struct. 2020, 93, 102875. [Google Scholar] [CrossRef]
- Gater, B.; Bayandor, J. Amplitude Effects on Thrust Production for Undulatory Swimmers. In Proceedings of the APS Division of Fluid Dynamics Meeting Abstracts, Denver, CO, USA, 19–21 November 2017; p. L9.007. [Google Scholar]
- Piskur, P.; Szymak, P.; Flis, L.; Sznajder, J. Analysis of a Fin Drag Force in a Biomimetic Underwater Vehicle. Nase More 2020, 67, 192–198. [Google Scholar] [CrossRef]
- Bergmann, M.; Iollo, A. Modeling and simulation of fish-like swimming. J. Comput. Phys. 2011, 230, 329–348. [Google Scholar] [CrossRef]
- Kubit, A.; Trzepieciński, T.; Kiciński, R.; Jurczak, K. Three-Dimensional Smooth Particle Hydrodynamics Modeling and Experimental Analysis of the Ballistic Performance of Steel-Based FML Targets. Materials 2022, 15, 3711. [Google Scholar] [CrossRef] [PubMed]
- Behbahani, S.B.; Tan, X. Design and dynamic modeling of electrorheological fluid-based variable-stiffness fin for robotic fish. Smart Mater. Struct. 2017, 26, 085014. [Google Scholar] [CrossRef]
- Engels, T.; Kolomenskiy, D.; Schneider, K.; Sesterhenn, J. Numerical simulation of vortex-induced drag of elastic swimmer models. Theor. Appl. Mech. Lett. 2017, 7, 280–285. [Google Scholar] [CrossRef]
- Jurczyk, K.; Piskur, P.; Szymak, P. Parameters identification of the flexible fin kinematics model using vision and Genetic Algorithms. Pol. Marit. Res. 2020, 39–47. [Google Scholar] [CrossRef]
- Eloy, C. Optimal Strouhal number for swimming animals. J. Fluids Struct. 2012, 30, 205–218. [Google Scholar] [CrossRef] [Green Version]
- Buckingham, E. The principle of similitude. Nature 1915, 96, 396–397. [Google Scholar] [CrossRef] [Green Version]
- Kiciński, R.; Kruszkowska, E.O.; Szturomski, B.; Jurczak, W. Stand for Biomimetic Swimming Fins Fatigue Testing. Preprints 2022. [Google Scholar] [CrossRef]
- Szturomski, B. Dynamic characteristics of high quality steel in Johnson-Cook’s model for fast processes simulation in CAE programs. In Solid State Phenomena; Trans Tech Publications: Freienbach, Switzerland, 2015; Volume 236, pp. 31–38. [Google Scholar]
- Reynolds, O. XXIX. An experimental investigation of the circumstances which determine whether the motion of water shall be direct or sinuous, and of the law of resistance in parallel channels. Philos. Trans. R. Soc. Lond. 1883, 174, 935–982. [Google Scholar]
- Baik, Y.S.; Bernal, L.P. Experimental study of pitching and plunging airfoils at low Reynolds numbers. Exp. Fluids 2012, 53, 1979–1992. [Google Scholar] [CrossRef]
- Triantafyllou, G.S.; Triantafyllou, M.S.; Grosenbaugh, M.A. Optimal thrust development in oscillating foils with application to fish propulsion. J. Fluids Struct. 1993, 7, 205–224. [Google Scholar] [CrossRef]
- Maertens, A.P.; Triantafyllou, M.S.; Yue, D.K.P. Efficiency of fish propulsion. Bioinspir. Biomimetics 2015, 10, 046013. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bevilaqua, P.; Yam, C. Propulsive Efficiency of Wake Ingestion. J. Propuls. Power 2020, 36, 517–526. [Google Scholar] [CrossRef]
- Piskur, P.; Szymak, P.; Sznajder, J. Identification in a laboratory tunnel to control fluid velocity. In Advanced, Contemporary Control; Springer: Berlin/Heidelberg, Germany, 2020; pp. 1543–1552. [Google Scholar]
- Piskur, P. Strouhal Number Measurement for Novel Biomimetic Folding Fins Using an Image Processing Method. J. Mar. Sci. Eng. 2022, 10, 484. [Google Scholar] [CrossRef]
- Thielicke, W.; Stamhuis, E. PIVlab–towards user-friendly, affordable and accurate digital particle image velocimetry in MATLAB. J. Open Res. Softw. 2014, 2, 1. [Google Scholar] [CrossRef] [Green Version]
- Thielicke, W.; Sonntag, R. Particle Image Velocimetry for MATLAB: Accuracy and enhanced algorithms in PIVlab. J. Open Res. Softw. 2021, 9, 1. [Google Scholar] [CrossRef]
- Majewski, W.; Wei, R.; Kumar, V. Developing particle image velocimetry software based on a deep neural network. J. Flow Vis. Image Process. 2020, 27, 4. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean Thrust N | |||||||
|---|---|---|---|---|---|---|---|
| Fin Dimensions | Thickness mm × Width mm | ||||||
| Length mm | 1.0 × 55 | 1.0 × 45 | 1.0 × 35 | 0.75 × 55 | 0.75 × 45 | 0.75 × 35 | 0.5 × 55 |
| 330 | 0.93 | 0.77 | 0.53 | 0.66 | 0.55 | 0.37 | 0.43 |
| 320 | 0.90 | 0.70 | 0.53 | 0.68 | 0.57 | 0.33 | 0.40 |
| 310 | 0.88 | 0.69 | 0.53 | 0.70 | 0.56 | 0.38 | 0.38 |
| 300 | 0.89 | 0.67 | 0.54 | 0.70 | 0.57 | 0.36 | 0.39 |
| 290 | 0.81 | 0.62 | 0.49 | 0.72 | 0.57 | 0.33 | 0.38 |
| 280 | 0.74 | 0.53 | 0.46 | 0.66 | 0.54 | 0.39 | 0.34 |
| 270 | 0.71 | 0.60 | 0.44 | 0.65 | 0.50 | 0.34 | 0.38 |
| 260 | 0.67 | 0.53 | 0.44 | 0.63 | 0.47 | 0.38 | 0.40 |
| 250 | 0.63 | 0.53 | 0.45 | 0.55 | 0.46 | 0.33 | 0.43 |
| 240 | 0.60 | 0.54 | 0.47 | 0.54 | 0.46 | 0.28 | 0.47 |
| 230 | 0.58 | 0.51 | 0.46 | 0.46 | 0.43 | 0.27 | 0.47 |
| 220 | 0.59 | 0.58 | 0.50 | 0.41 | 0.41 | 0.27 | 0.51 |
| 210 | 0.68 | 0.66 | 0.49 | 0.48 | 0.44 | 0.31 | 0.49 |
| 200 | 0.70 | 0.67 | 0.58 | 0.42 | 0.47 | 0.32 | 0.45 |
| 190 | 0.75 | 0.73 | 0.59 | 0.43 | 0.48 | 0.30 | 0.42 |
| 180 | 0.81 | 0.70 | 0.59 | 0.40 | 0.51 | 0.36 | 0.40 |
| 170 | 0.90 | 0.78 | 0.60 | 0.52 | 0.59 | 0.39 | 0.32 |
| 160 | 0.90 | 0.81 | 0.59 | 0.55 | 0.55 | 0.39 | 0.32 |
| 150 | 0.93 | 0.80 | 0.55 | 0.63 | 0.64 | 0.29 | 0.29 |
| 140 | 0.92 | 0.71 | 0.50 | 0.67 | 0.63 | 0.22 | 0.32 |
| 130 | 0.90 | 0.73 | 0.44 | 0.62 | 0.58 | 0.31 | 0.34 |
| 120 | 0.74 | 0.67 | 0.35 | 0.55 | 0.49 | 0.24 | 0.37 |
| 110 | 0.65 | 0.64 | 0.26 | 0.49 | 0.45 | 0.16 | 0.40 |
| 100 | 0.53 | 0.47 | 0.29 | 0.30 | 0.34 | 0.15 | 0.43 |
| 90 | 0.43 | 0.31 | 0.27 | 0.21 | 0.19 | 0.14 | 0.40 |
| 80 | 0.39 | 0.27 | 0.19 | 0.15 | 0.16 | 0.13 | 0.34 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Piskur, P. Side Fins Performance in Biomimetic Unmanned Underwater Vehicle. Energies 2022, 15, 5783. https://doi.org/10.3390/en15165783
Piskur P. Side Fins Performance in Biomimetic Unmanned Underwater Vehicle. Energies. 2022; 15(16):5783. https://doi.org/10.3390/en15165783
Chicago/Turabian StylePiskur, Paweł. 2022. "Side Fins Performance in Biomimetic Unmanned Underwater Vehicle" Energies 15, no. 16: 5783. https://doi.org/10.3390/en15165783
APA StylePiskur, P. (2022). Side Fins Performance in Biomimetic Unmanned Underwater Vehicle. Energies, 15(16), 5783. https://doi.org/10.3390/en15165783