A bearingless PMSM normally has two sets of windings: torque winding and suspension winding, respectively. When the suspension winding is supplied with a suitable current, the airgap magnet field will contain a bias component, thereby generating a suspension force to suspend the rotor. The problem of life shortening of traditional mechanical bearings due to increased friction during high-speed operation can be avoided. The operation and maintenance cost of the motor can also be reduced [
1,
2]. In recent years, the design of bearingless motors and the application of various control methods have improved its operation stability and promoted its application in special transmission occasions, such as vacuum and ultra-clean [
3,
4].
Radial and tangential components of the electromagnetic force between the stator and rotor of bearingless PMSM are closely related to the air-gap flux density distribution. An analytical model of the radial suspension force of bearingless PMSM is proposed in [
5], which points out the source of suspension force fluctuation. In order to improve the distribution of the air-gap magnetic field generated by the stator, the air-gap magnetic field modulation method is proposed by slotting the stator tooth [
6,
7]. The auxiliary coil structure is proposed in the literature [
8,
9]. The number of turns of the auxiliary winding is optimized by using the magneto-motive force star diagram method, and the torque and suspension force fluctuation is reduced effectively in order to modulate the air-gap magnetic field generated by the stator. In order to improve the magnetic field distribution of the air-gap generated by the rotor, the Halbach permanent magnet array, combined magnetic pole, and eccentric magnetic pole are adopted in literature [
10,
11,
12], which effectively reduced the fluctuation of torque and suspension force. However, these rotor structures increase the difficulty and cost of motor manufacturing in the actual machining process. The circumferential subsection method of magnets can improve the sinusoidal characteristics of the air-gap flux density of surface-mounted PMSM, that is, by changing the number and size of permanent magnets at each pole and making them arranged in the circumferential direction of the rotor by a certain rule so that the purpose of reducing the harmonic content of the air-gap flux density can be achieved [
13,
14] and can effectively weaken the cogging torque. As a method of the circumferential segment of magnetic poles, magnetic pole modulation technology determines the width and position of each permanent magnet by using the pulse-width modulation principle, which can suppress the air-gap flux density harmonics generated by permanent magnets effectively. The Fourier decomposition method establishes equations based on the harmonic coefficient expression of the air-gap magnetic density to calculate the position of permanent magnets to eliminate harmonics [
15]. However, the more harmonics need to be eliminated, the more blocks of permanent magnet will be. Therefore, a permanent magnet block structure with the same thickness and different grades is used to modulate and eliminate harmonics in [
16,
17]. However, the elimination of some harmonics will lead to the increase of other harmonics, so the suppression effect of torque ripple cannot be guaranteed. The spatial position of each permanent magnet of the modulated magnetic pole was deduced by using the principle of equal area, and the no-load air-gap flux density of the motor was analyzed in [
18]. It is pointed out that the harmonic distortion rate of the air-gap flux density of the modulated magnetic pole is reduced compared with the whole magnetic pole. However, when using an equal amplitude modulated magnetic pole, the variation of modulation ratio is limited due to the limited length of the air-gap and the change of modulation ratio determines the width of the permanent magnet block directly. In order to ensure the rotor MMF at one pole is unchanged, the thickness of the permanent magnet increases with the decrease of the width of the permanent magnet. In order to avoid overlapping, the maximum modulation ratio can only be 1. The thickness of the intermediate permanent magnet block cannot be infinitely reduced, and the thickness of the permanent magnet block cannot be increased without restriction because the thicker the permanent magnet block is, the greater the reluctance is, which will lead to the invisible increase effect of flux provided by the permanent magnet to the external magnetic circuit, and the output torque amplitude cannot be guaranteed. What is more, with the increase of the permanent magnet block thickness, the cogging effect will be increased, resulting in the effect of torque ripple optimization decrease. The analytical model of the modulated magnetic pole was derived in [
19], and the variation of air-gap flux density harmonics with permanent magnet block parameters under different carrier ratios is studied by using the analytical model.
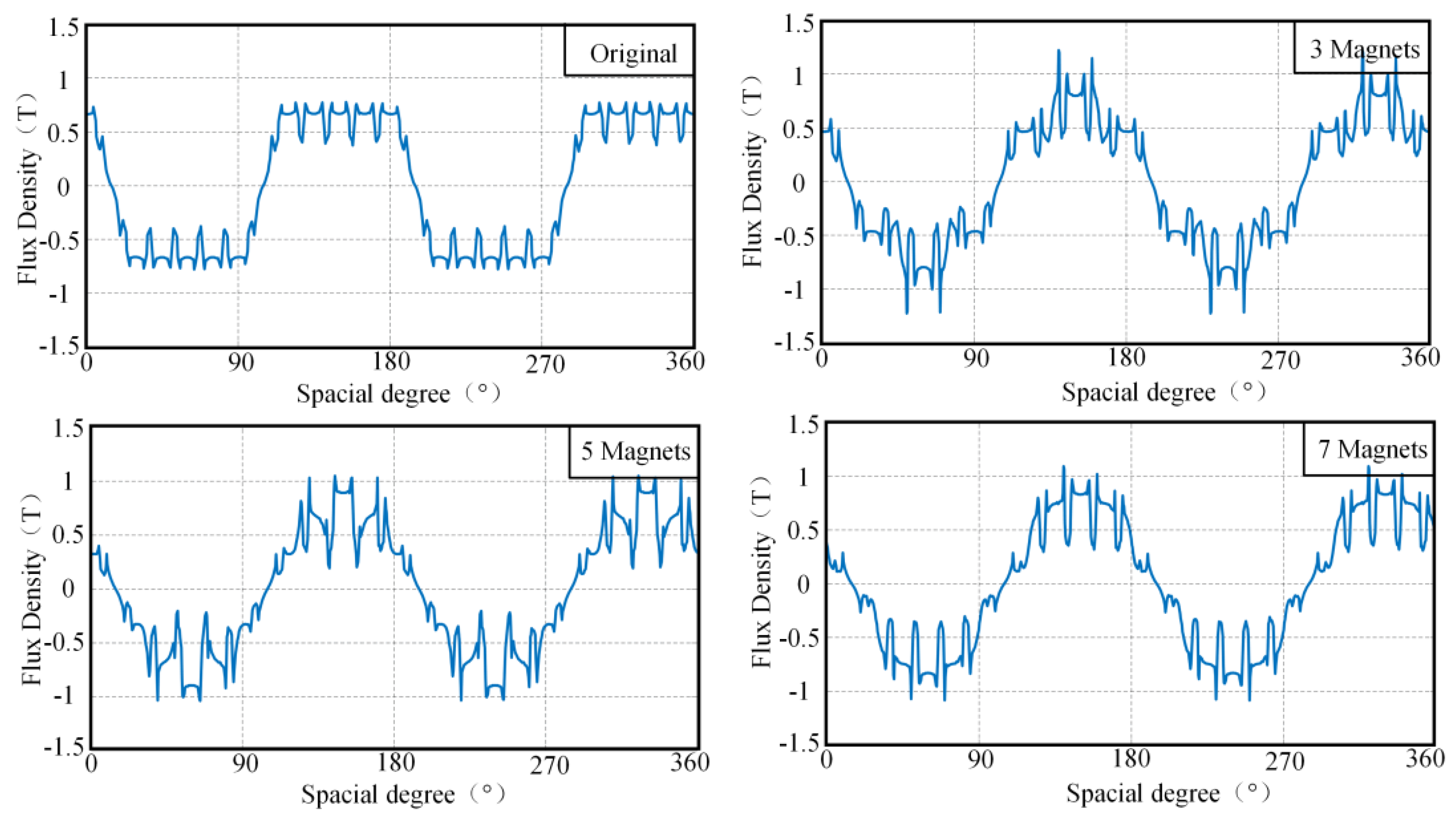
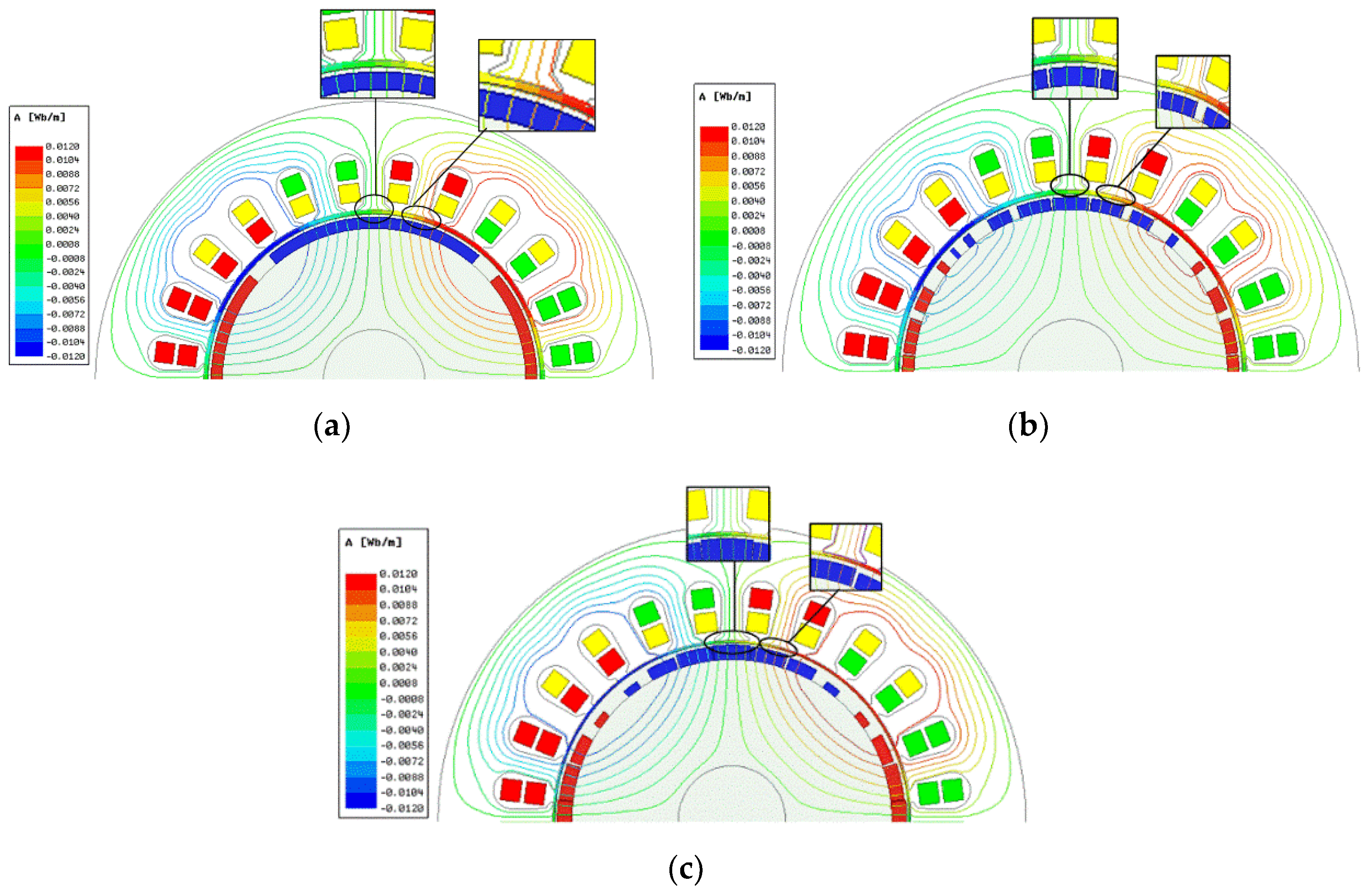
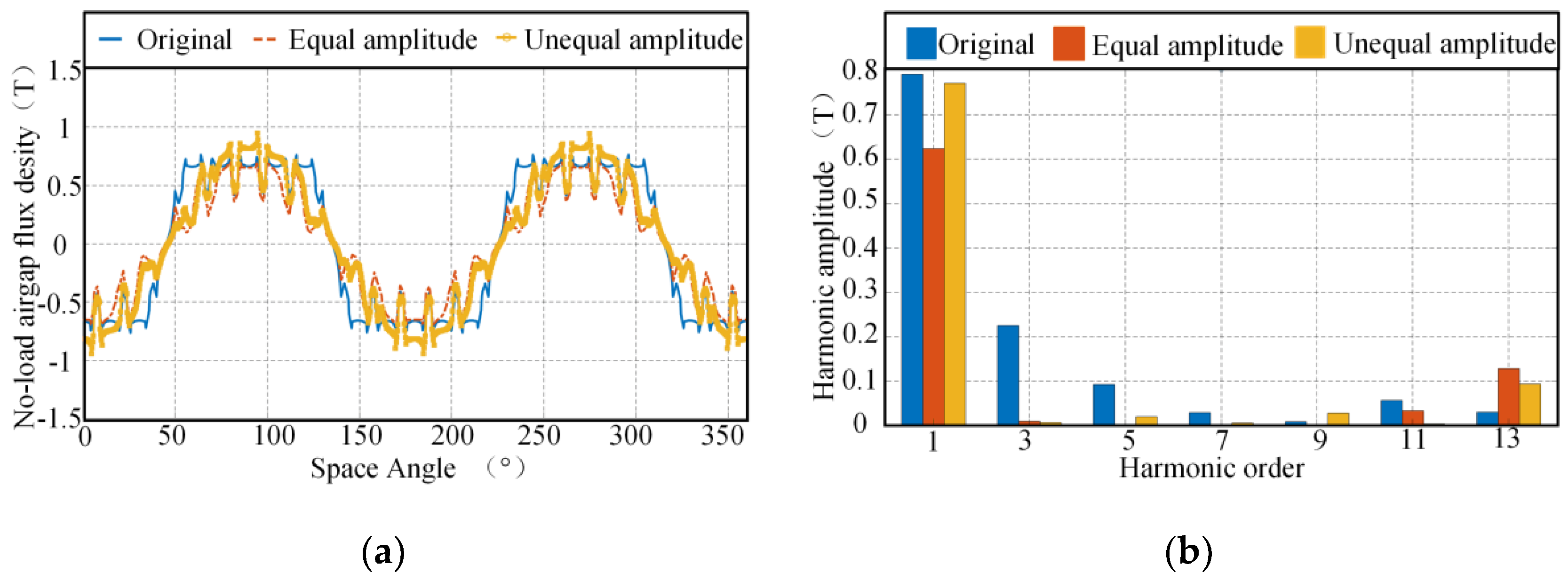
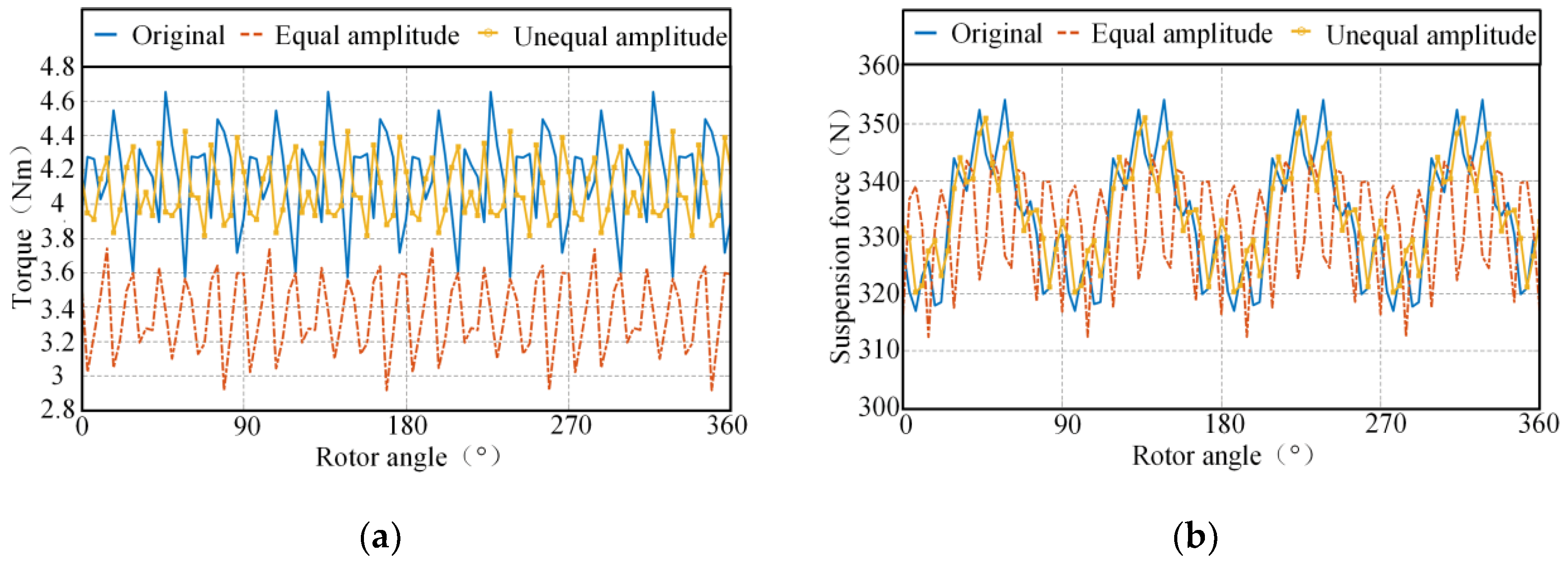
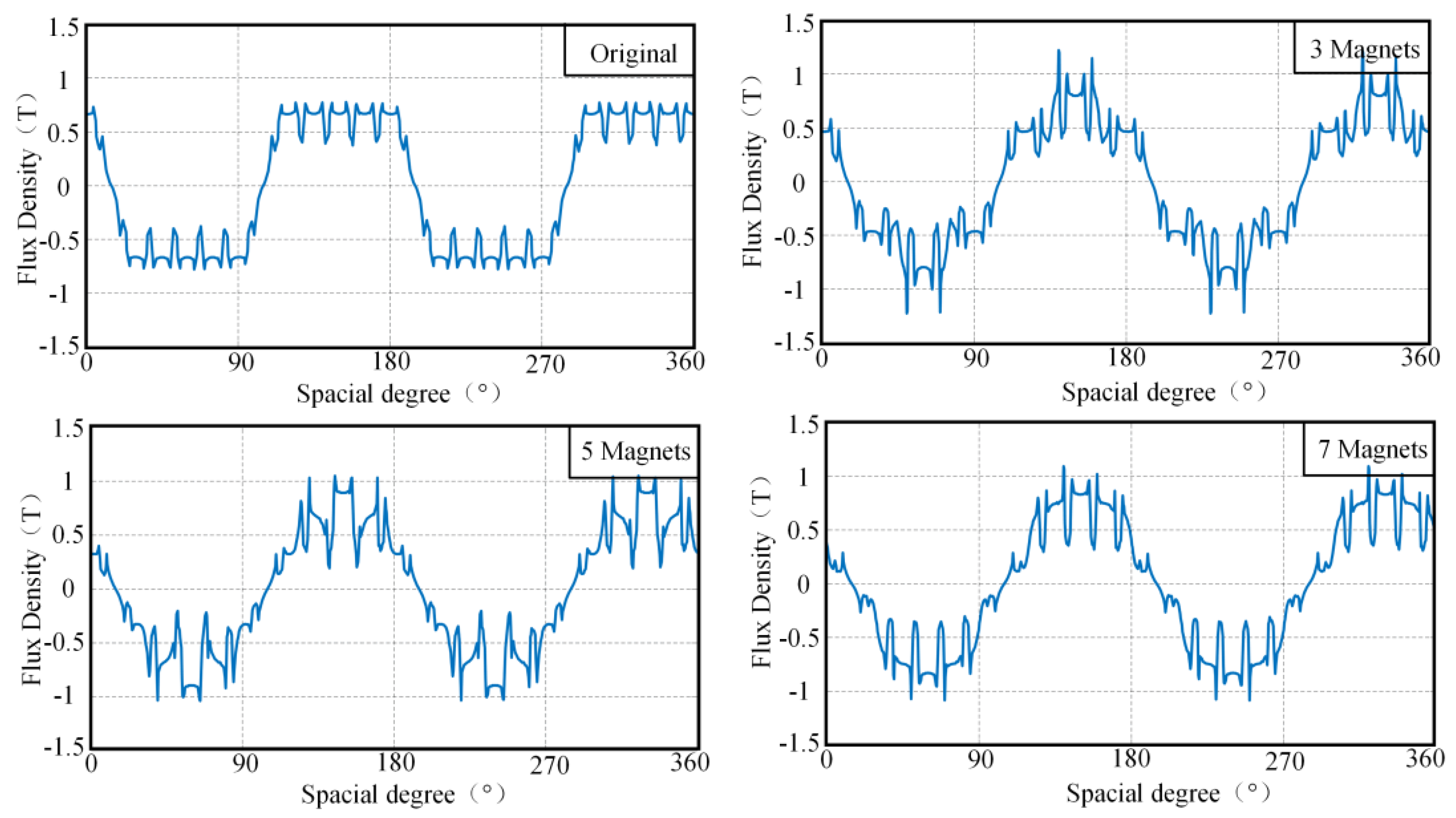
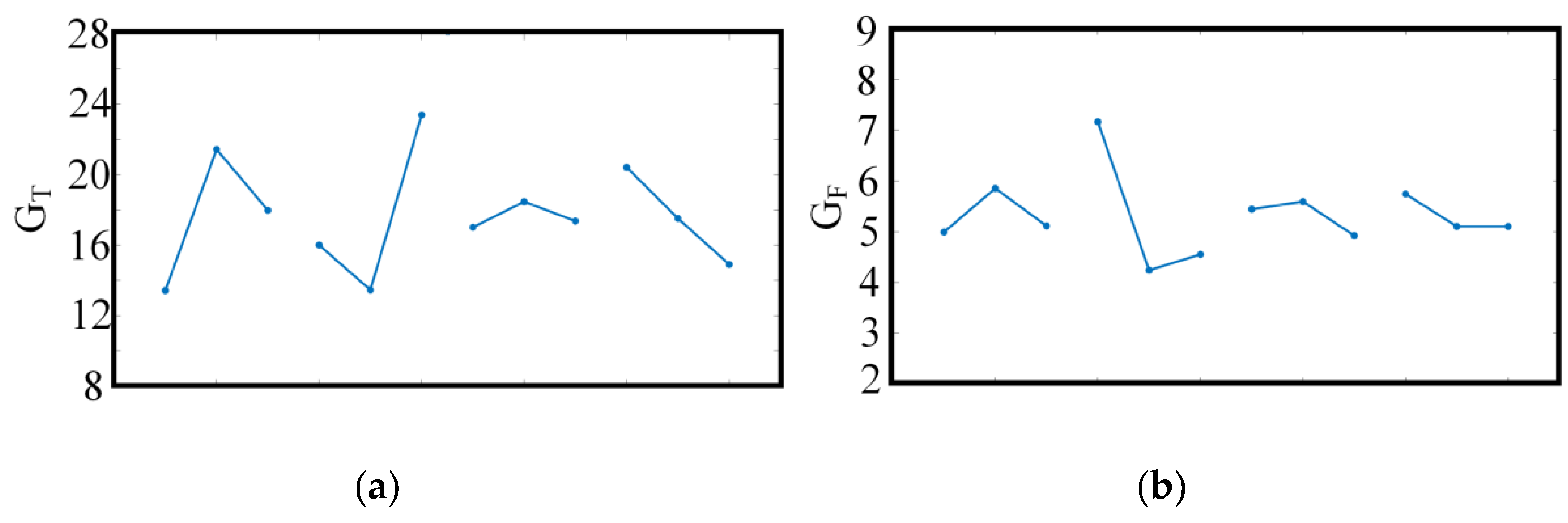
In order to solve a series of problems caused by the limited range of the modulation ratio of the equal amplitude modulated magnetic poles, an unequal amplitude permanent magnet width modulation method, that is, carrier waves with different amplitudes is used to modulate the wave proposed for bearingless PMSM in this paper. This method effectively improves the inflexible adjustment of magnetic pole parameters in equal amplitude modulated magnetic design. At the same time, the Taguchi method is used to optimize the design. The best parameter combination of the unequal amplitude modulation permanent magnet is achieved. The structure of the whole magnetic pole, the structure of the equal amplitude modulation magnetic pole and the structure of the unequal amplitude modulation magnetic pole are compared and analyzed by the finite element method. The results show that the unequal amplitude modulated magnetic pole structure can guarantee the output capacity of the motor and effectively improve the running stability of the motor.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}