
Net Hydrogen Consumption Minimization of Fuel Cell Hybrid Trains Using a Time-Based Co-Optimization Model




Abstract
:1. Introduction
- (1)
- A time-based co-optimization model based on MILP for FCHT is proposed to tackle the intrinsic nonlinear efficiency characteristics of fuel cell and convert the traditional energy-saving problem into a more realistic hydrogen-saving one. The train control, namely, the train speed trajectory, and energy management between two adjacent stations are optimized simultaneously to guide the autonomous driving.
- (2)
- The impact of capacity of ESD on the hydrogen consumption has been studied for FCHTs, and the corresponding hydrogen-saving mechanisms are explored with the quantitative simulation results, giving an insightful analysis and discussion on the mutual influence on optimal train operation.
2. Methods
2.1. Motion Model
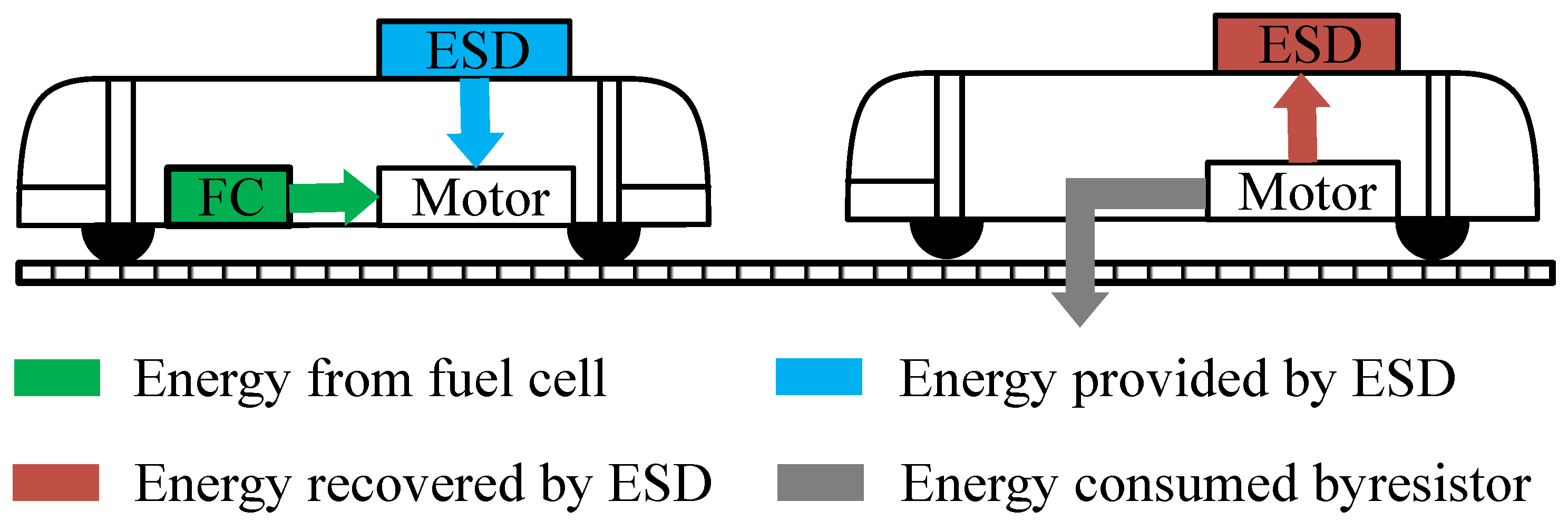
2.2. Energy Flow Model
2.3. Piecewise Linearization Using Special Ordered Set Type 2 (SOS2)
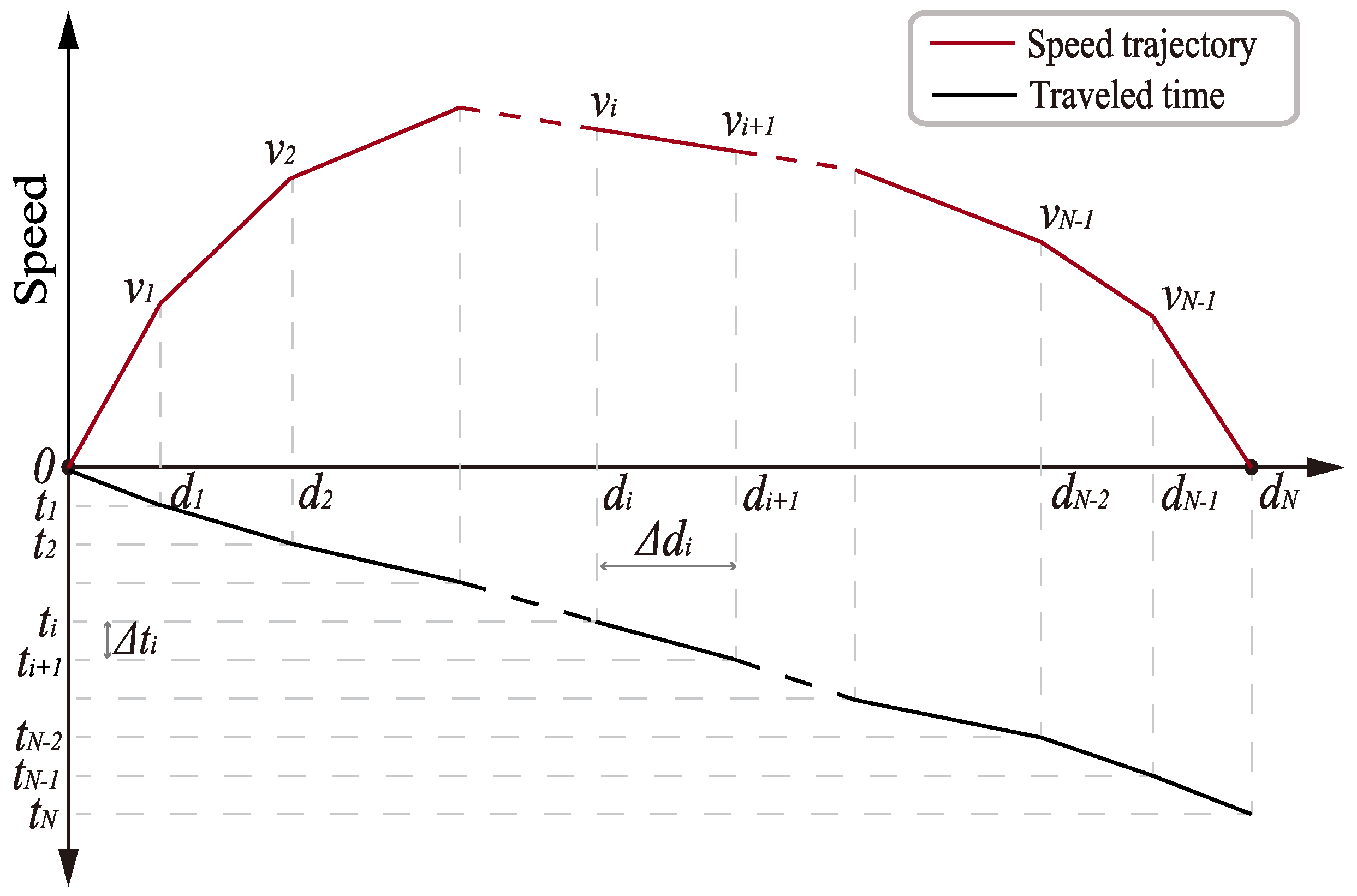
2.3.1. Speed-Related Variables
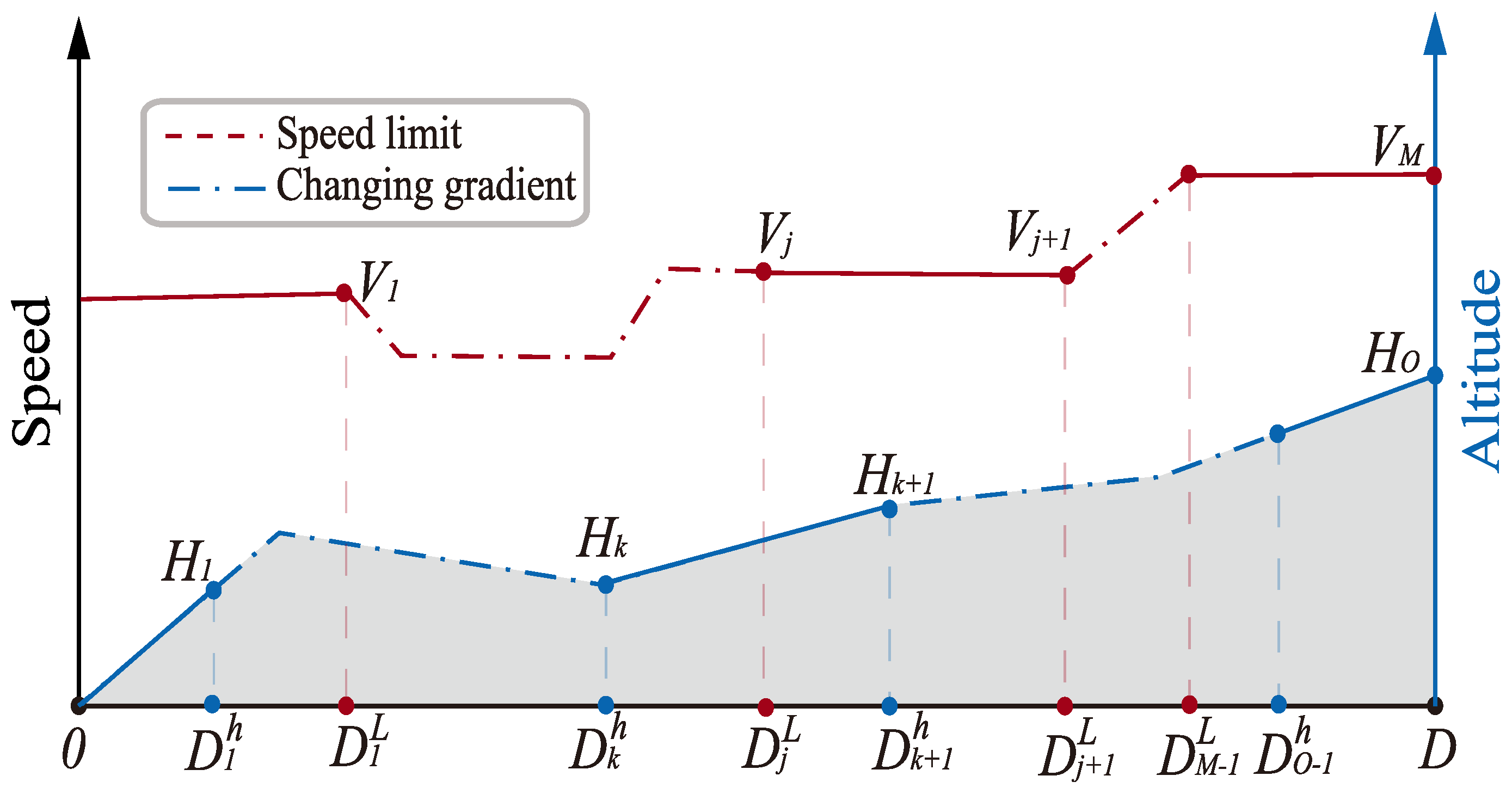
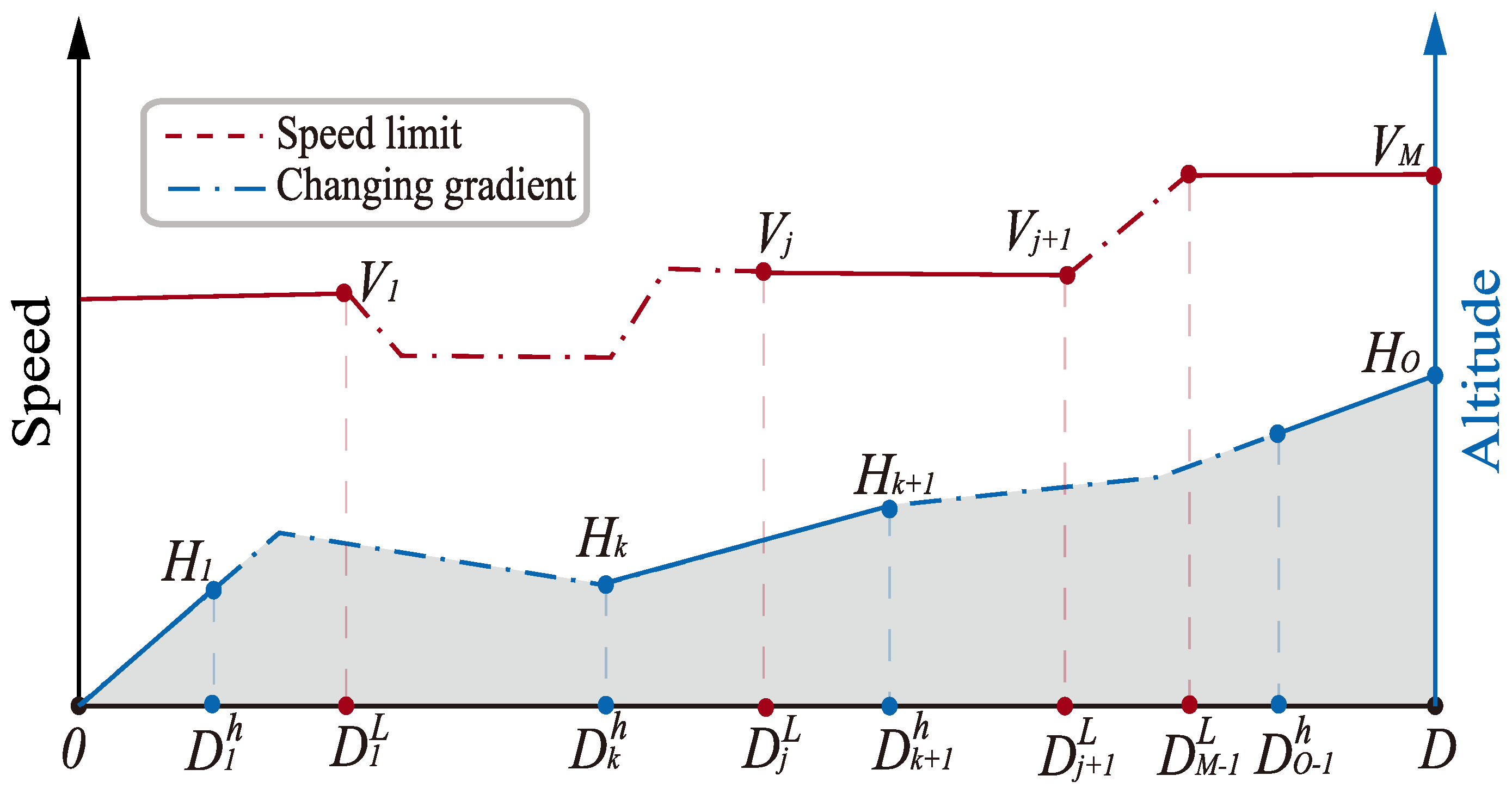
2.3.2. Speed Limit and Altitude
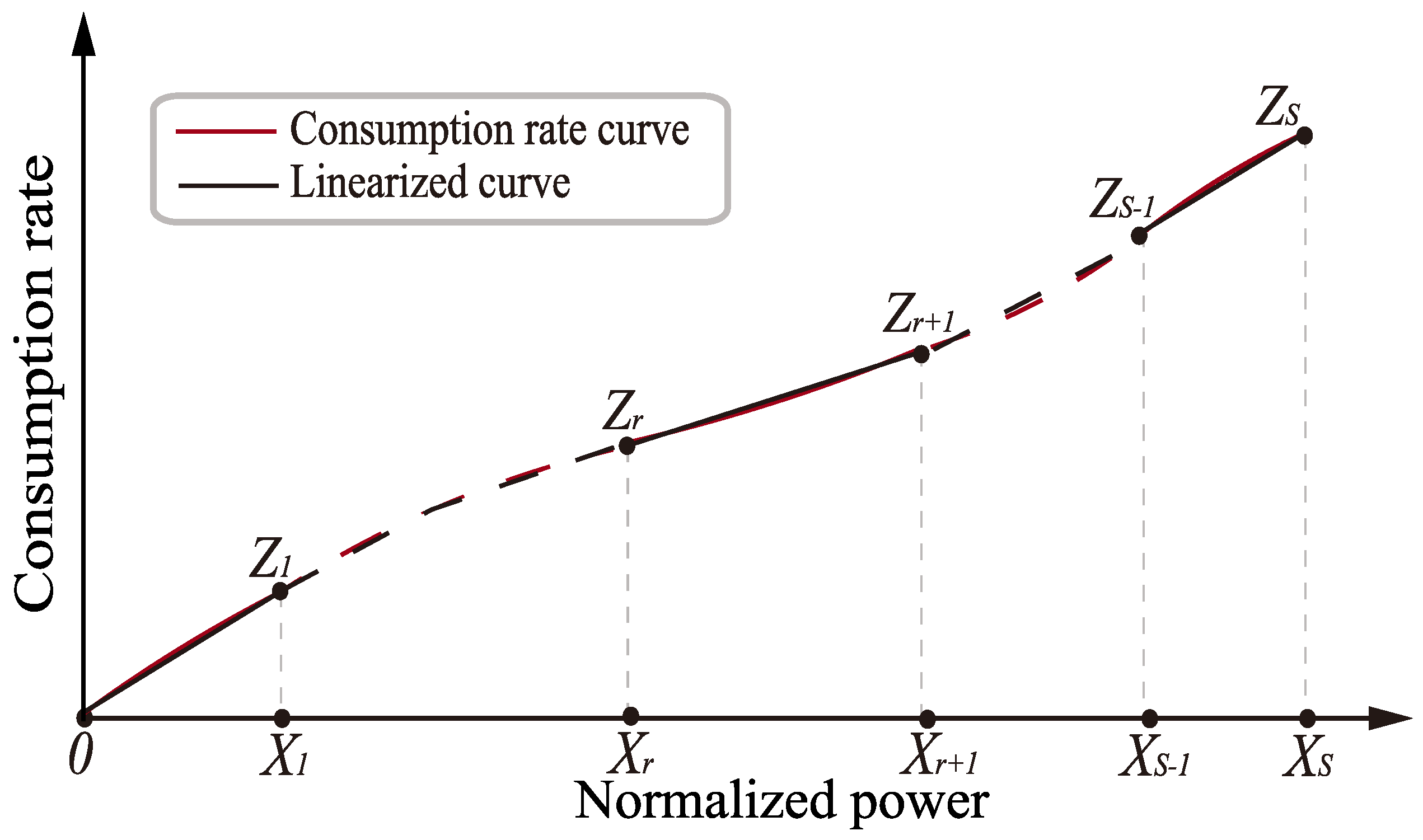
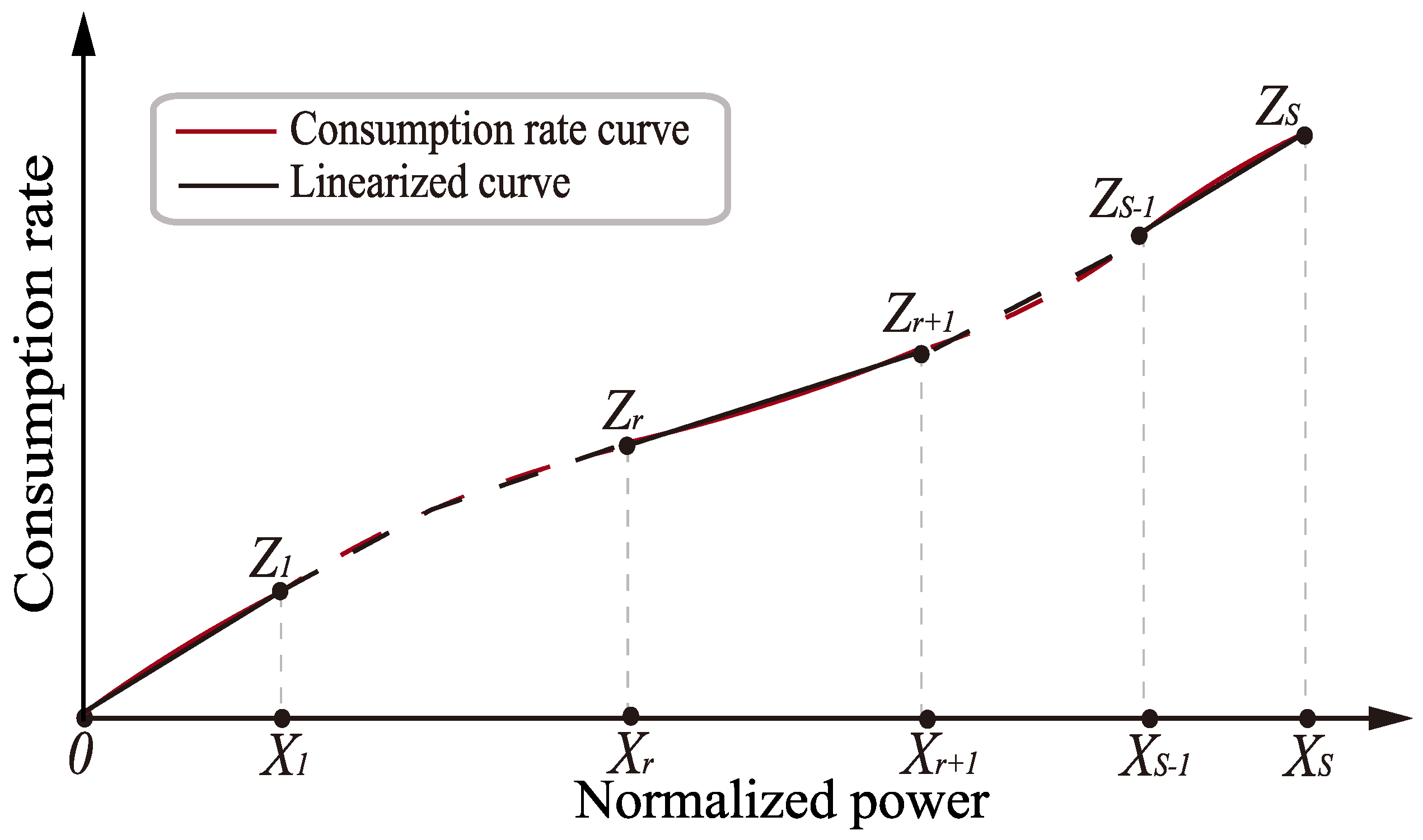
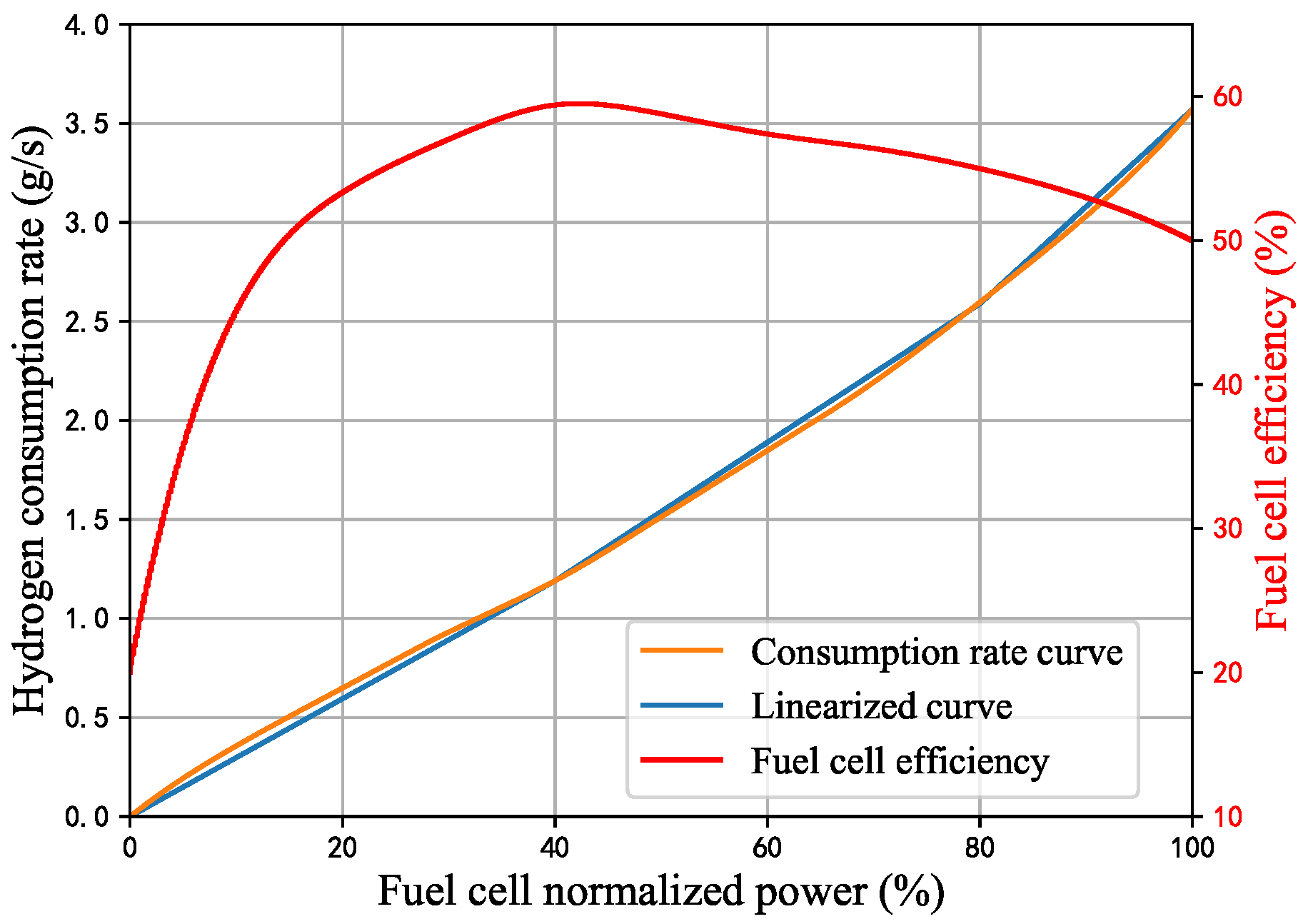
2.3.3. Hydrogen Efficiency
2.4. Co-Optimization and Sequential Optimization Model
2.4.1. Co-Optimization
2.4.2. Sequential Optimization
- Step 1: Speed trajectory optimizationThe first step is to obtain the speed trajectory with the aim of minimizing net energy consumption (NEC) of the motor. Namely, we take (52) as the objective function. Thus, it needs to be subject to constraints related to the solving speed trajectory, (1) ∼ (10) and (22) ∼ (35).
- Step 2: Energy management optimizationThe second step is to optimize the energy management with the aim of minimizing the net hydrogen consumption (NHC). In this step, the speed trajectory is obtained during the first step, determining the energy demand of the motor, . Thus, the second step can be described as (53).where and are the decision variables.
3. Results
3.1. The Impact of ESD Capacity on Hydrogen Consumption
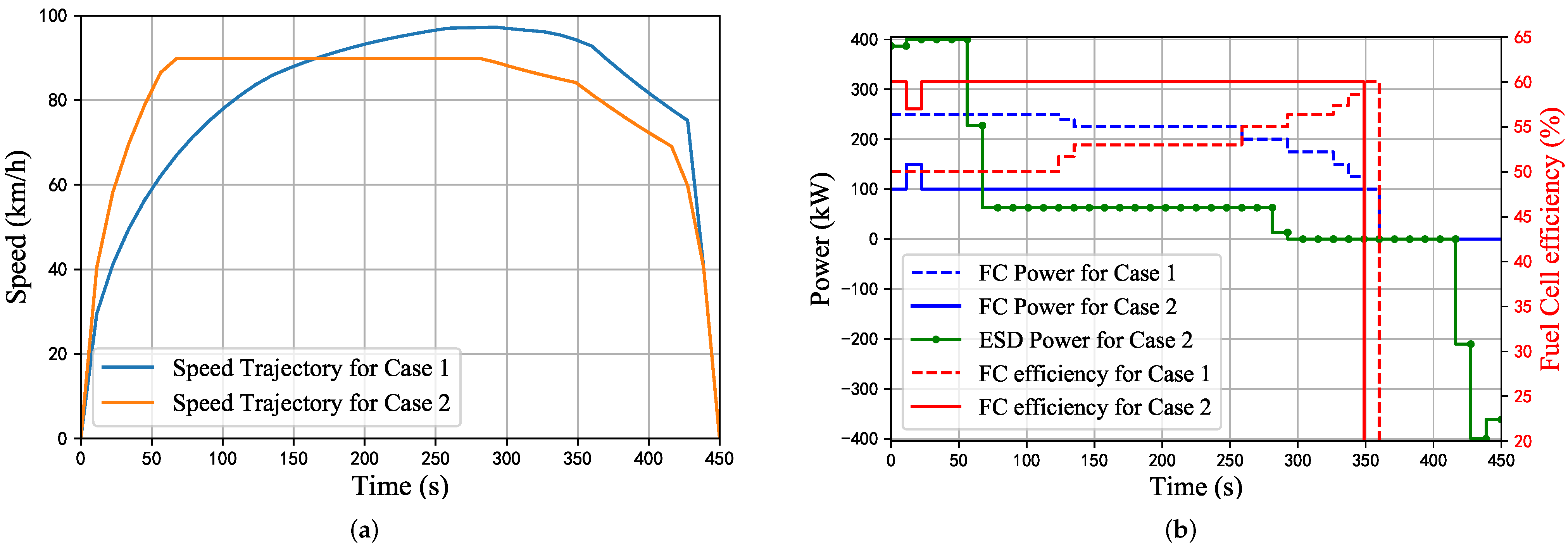
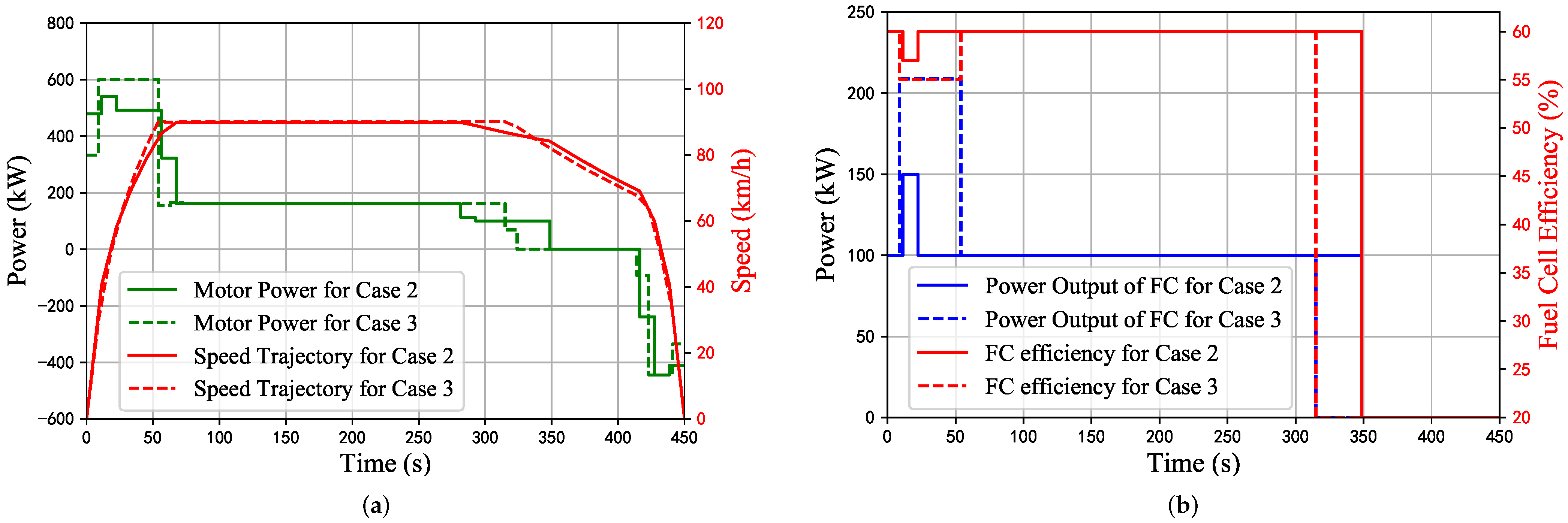
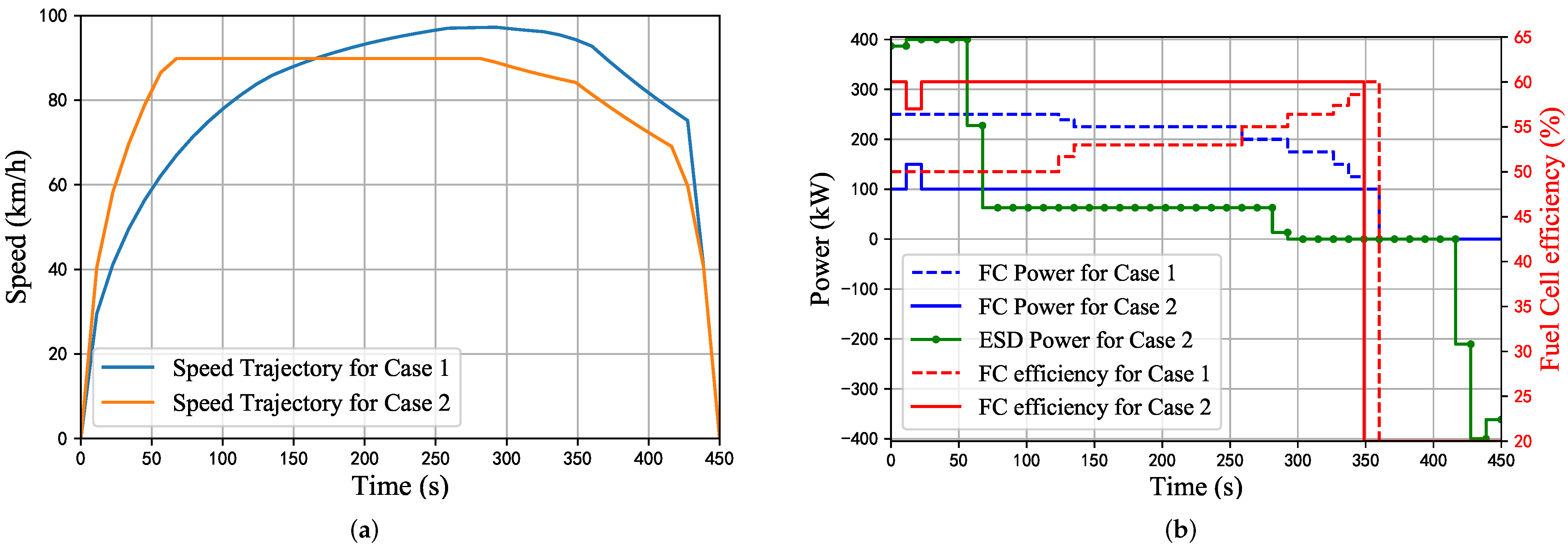
3.2. Case Study on Flat Track
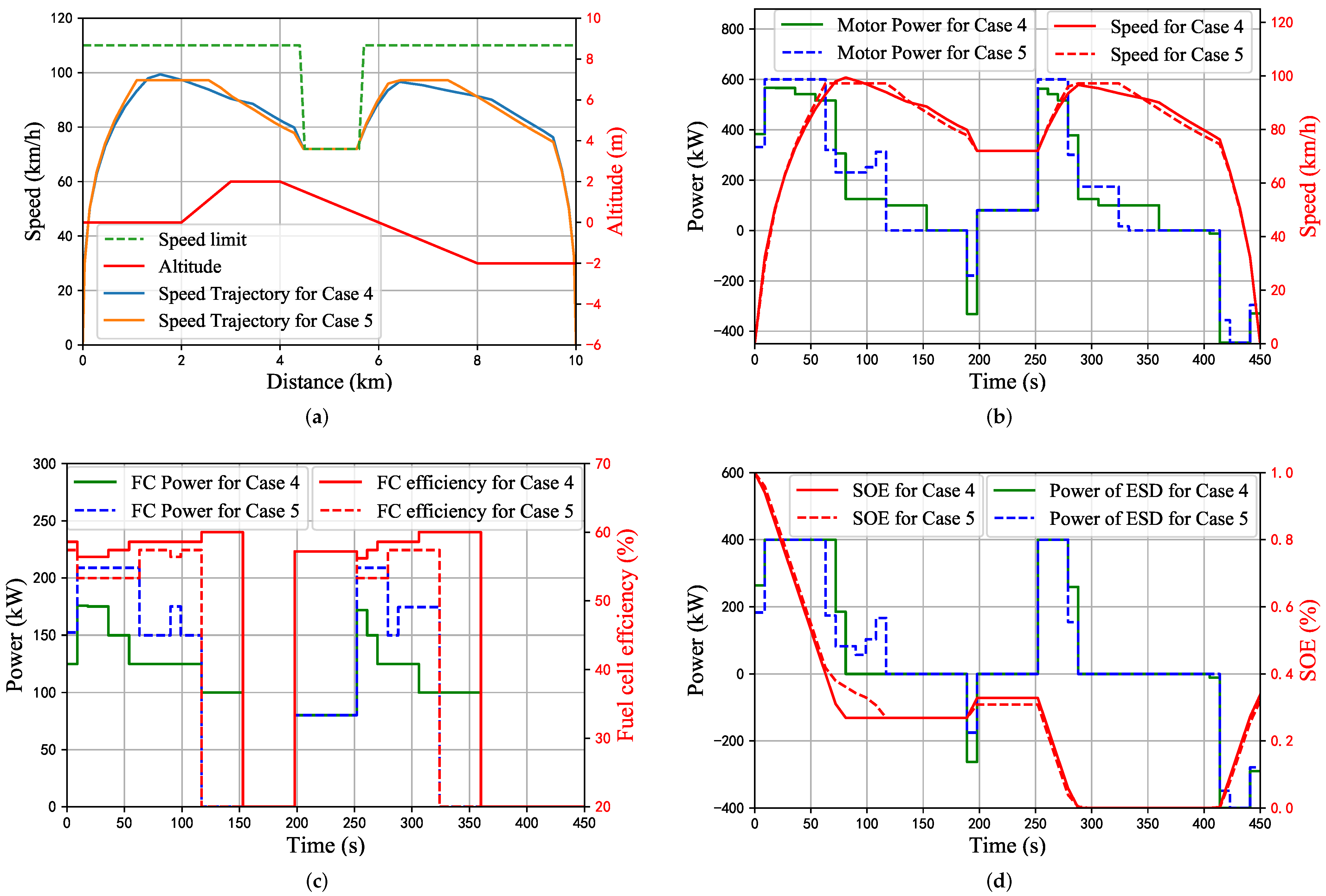
3.3. Case Study with Speed Limits and Gradients
4. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- International Energy Agency. CO2 Emissions from Fuel Combustion: Overview. 2017. Available online: https://www.iea.org/reports/co2-emissions-from-fuel-combustion-overview (accessed on 25 November 2021).
- International Energy Agency. Railway Handbook 2017. Available online: https://www.iea.org/reports/railway-handbook-2017 (accessed on 25 November 2021).
- Chang, X.; Ma, T.; Wu, R. Impact of urban development on residents’ public transportation travel energy consumption in China: An analysis of hydrogen fuel cell vehicles alternatives. Int. J. Hydrog. Energy 2019, 44, 16015–16027. [Google Scholar] [CrossRef]
- Hoffrichter, A.; Miller, A.R.; Hillmansen, S.; Roberts, C. Well-to-wheel analysis for electric, diesel and hydrogen traction for railways. Transp. Res. Part Transp. Environ. 2012, 17, 28–34. [Google Scholar] [CrossRef]
- Schenker, M.; Schirmer, T.; Dittus, H. Application and improvement of a direct method optimization approach for battery electric railway vehicle operation. Proc. Inst. Mech. Eng. Part J. Rail Rapid Transit 2021, 235, 854–865. [Google Scholar] [CrossRef]
- Zenith, F.; Isaac, R.; Hoffrichter, A.; Thomassen, M.S.; Møller-Holst, S. Techno-economic analysis of freight railway electrification by overhead line, hydrogen and batteries: Case studies in Norway and USA. Proc. Inst. Mech. Eng. Part J. Rail Rapid Transit 2020, 234, 791–802. [Google Scholar] [CrossRef] [Green Version]
- Albrecht, A.; Howlett, P.; Pudney, P.; Vu, X.; Zhou, P. The key principles of optimal train control—Part 1: Formulation of the model, strategies of optimal type, evolutionary lines, location of optimal switching points. Transp. Res. Part Methodol. 2016, 94, 482–508. [Google Scholar] [CrossRef]
- Albrecht, A.; Howlett, P.; Pudney, P.; Vu, X.; Zhou, P. The key principles of optimal train control—Part 2: Existence of an optimal strategy, the local energy minimization principle, uniqueness, computational techniques. Transp. Res. Part Methodol. 2016, 94, 509–538. [Google Scholar] [CrossRef]
- Scheepmaker, G.M.; Goverde, R.M.; Kroon, L.G. Review of energy-efficient train control and timetabling. Eur. J. Oper. Res. 2017, 257, 355–376. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; De Schutter, B.; van den Boom, T.J.; Ning, B. Optimal trajectory planning for trains—A pseudospectral method and a mixed integer linear programming approach. Transp. Res. Part Emerg. Technol. 2013, 29, 97–114. [Google Scholar] [CrossRef]
- Tan, Z.; Lu, S.; Bao, K.; Zhang, S.; Wu, C.; Yang, J.; Xue, F. Adaptive partial train speed trajectory optimization. Energies 2018, 11, 3302. [Google Scholar] [CrossRef] [Green Version]
- Lu, S.; Hillmansen, S.; Ho, T.K.; Roberts, C. Single-Train Trajectory Optimization. IEEE Trans. Intell. Transp. Syst. 2013, 14, 743–750. [Google Scholar] [CrossRef]
- Snoussi, J.; Ben Elghali, S.; Benbouzid, M.; Mimouni, M.F. Auto-adaptive filtering-based energy management strategy for fuel cell hybrid electric vehicles. Energies 2018, 11, 2118. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Yang, L.; Tang, T.; Gao, Z.; Cao, F.; Li, K. Train speed profile optimization with on-board energy storage devices: A dynamic programming based approach. Comput. Ind. Eng. 2018, 126, 149–164. [Google Scholar] [CrossRef]
- Wu, C.; Zhang, W.; Lu, S.; Tan, Z.; Xue, F.; Yang, J. Train Speed Trajectory Optimization With On-Board Energy Storage Device. IEEE Trans. Intell. Transp. Syst. 2019, 20, 4092–4102. [Google Scholar] [CrossRef]
- Sorlei, I.S.; Bizon, N.; Thounthong, P.; Varlam, M.; Carcadea, E.; Culcer, M.; Iliescu, M.; Raceanu, M. Fuel cell electric vehicles—A brief review of current topologies and energy management strategies. Energies 2021, 14, 252. [Google Scholar] [CrossRef]
- Kamal, E.; Adouane, L. Optimized EMS and a Comparative Study of Hybrid Hydrogen Fuel Cell/Battery Vehicles. Energies 2022, 15, 738. [Google Scholar] [CrossRef]
- Zhang, W.; Xu, L.; Li, J.; Ouyang, M.; Liu, Y.; Han, Q.; Li, Y. Comparison of daily operation strategies for a fuel cell/battery tram. Int. J. Hydrog. Energy 2017, 42, 18532–18539. [Google Scholar] [CrossRef]
- Peng, H.; Li, J.; Löwenstein, L.; Hameyer, K. A scalable, causal, adaptive energy management strategy based on optimal control theory for a fuel cell hybrid railway vehicle. Appl. Energy 2020, 267, 114987. [Google Scholar] [CrossRef]
- Li, Q.; Wang, T.; Li, S.; Chen, W.; Liu, H.; Breaz, E.; Gao, F. Online extremum seeking-based optimized energy management strategy for hybrid electric tram considering fuel cell degradation. Appl. Energy 2021, 285, 116505. [Google Scholar] [CrossRef]
- Yan, Y.; Li, Q.; Chen, W.; Su, B.; Liu, J.; Ma, L. Optimal Energy Management and Control in Multimode Equivalent Energy Consumption of Fuel Cell/Supercapacitor of Hybrid Electric Tram. IEEE Trans. Ind. Electron. 2019, 66, 6065–6076. [Google Scholar] [CrossRef]
- Yan, Y.; Li, Q.; Chen, W.; Huang, W.; Liu, J. Hierarchical Management Control Based on Equivalent Fitting Circle and Equivalent Energy Consumption Method for Multiple Fuel Cells Hybrid Power System. IEEE Trans. Ind. Electron. 2020, 67, 2786–2797. [Google Scholar] [CrossRef]
- Yan, Y.; Li, Q.; Huang, W.; Chen, W. Operation Optimization and Control Method Based on Optimal Energy and Hydrogen Consumption for the Fuel Cell/Supercapacitor Hybrid Tram. IEEE Trans. Ind. Electron. 2021, 68, 1342–1352. [Google Scholar] [CrossRef]
- Sofía Mendoza, D.; Solano, J.; Boulon, L. Energy management strategy to optimise regenerative braking in a hybrid dual-mode locomotive. IET Electr. Syst. Transp. 2020, 10, 391–400. [Google Scholar] [CrossRef]
- Li, Q.; Huang, W.; Chen, W.; Yan, Y.; Shang, W.; Li, M. Regenerative braking energy recovery strategy based on Pontryagin’s minimum principle for fell cell/supercapacitor hybrid locomotive. Int. J. Hydrogen Energy 2019, 44, 5454–5461. [Google Scholar] [CrossRef]
- Chen, D.; Prakash, N.; Stefanopoulou, A.; Huang, M.; Kim, Y.; Hotz, S. Sequential optimization of velocity and charge depletion in a plug-in hybrid electric vehicle. In Proceedings of the 14th International Symposium on Advanced Vehicle Control, Beijing, China, 16–20 July 2018; pp. 558–563. [Google Scholar]
- Uebel, S.; Murgovski, N.; Tempelhahn, C.; Bäker, B. Optimal Energy Management and Velocity Control of Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 327–337. [Google Scholar] [CrossRef]
- Kim, Y.; Figueroa-Santos, M.; Prakash, N.; Baek, S.; Siegel, J.B.; Rizzo, D.M. Co-optimization of speed trajectory and power management for a fuel-cell/battery electric vehicle. Appl. Energy 2020, 260, 114254. [Google Scholar] [CrossRef]
- Peng, H.; Chen, Y.; Chen, Z.; Li, J.; Deng, K.; Thul, A.; Löwenstein, L.; Hameyer, K. Co-optimization of total running time, timetables, driving strategies and energy management strategies for fuel cell hybrid trains. eTransportation 2021, 9, 100130. [Google Scholar] [CrossRef]
- Jibrin, R.; Hillmansen, S.; Roberts, C.; Zhao, N.; Tian, Z. Convex Optimization of Speed and Energy Management System for Fuel Cell Hybrid Trains. arXiv 2021, arXiv:2109.13833. [Google Scholar]
- Huang, Z.; Wu, C.; Lu, S.; Xue, F. Hydrogen Consumption Minimization for Fuel Cell Trains Based on Speed Trajectory Optimization. In Proceedings of the 4th International Conference on Electrical and Information Technologies for Rail Transportation (EITRT) 2019; Springer: Singapore, 2020; pp. 335–345. [Google Scholar]
- He, H.; Zhang, Y.; Xiong, R.; Wang, C. A novel Gaussian model based battery state estimation approach: State-of-Energy. Appl. Energy 2015, 151, 41–48. [Google Scholar] [CrossRef]
- Bisschop, J. Linear programming tricks. AIMMS-Optim. Model. 2006, 63–75. [Google Scholar]
- Hoffrichter, A.; Hillmansen, S.; Roberts, C. Conceptual propulsion system design for a hydrogen-powered regional train. IET Electr. Syst. Transp. 2016, 6, 56–66. [Google Scholar] [CrossRef] [Green Version]
- Gurobi Optimization LLC. Gurobi Optimizer Reference Manual. 2020. Available online: https://www.gurobi.com/ (accessed on 7 April 2022).
- Wu, C.; Lu, S.; Xue, F.; Jiang, L.; Chen, M. Optimal Sizing of Onboard Energy Storage Devices for Electrified Railway Systems. IEEE Trans. Transp. Electrif. 2020, 6, 1301–1311. [Google Scholar] [CrossRef]
- González-Gil, A.; Palacin, R.; Batty, P. Sustainable urban rail systems: Strategies and technologies for optimal management of regenerative braking energy. Energy Convers. Manag. 2013, 75, 374–388. [Google Scholar] [CrossRef] [Green Version]
- González-Gil, A.; Palacin, R.; Batty, P.; Powell, J. A systems approach to reduce urban rail energy consumption. Energy Convers. Manag. 2014, 80, 509–524. [Google Scholar] [CrossRef] [Green Version]
- Jeong, K.S.; Oh, B.S. Fuel economy and life-cycle cost analysis of a fuel cell hybrid vehicle. J. Power Sources 2002, 105, 58–65. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Publication | Objective | Solution Approach (es) | Energy Management Method (s) |
|---|---|---|---|
| Snoussi et al. [13] | Minimize hydrogen consumption and preserve battery life | Sliding mode control | Given speed trajectory |
| Kamal et al. [17] | Minimize hydrogen consumption and maintain the state of charge of the battery | A new fuel cell fuel consumption minimization strategy | Given speed trajectory |
| Zhang et al. [18] | Minimize hydrogen consumption | Battery state of charge (SOC) balanced strategy and dynamic programming | Given speed trajectory and power–demand curve |
| Peng et al. [19] | Minimize hydrogen consumption and battery loss | Adaptive Pontryagin’s minimum principle-based strategies | Given speed trajectory |
| Li et al. [20] | Minimize hydrogen consumption and the degradation of the stack | Online extremum-seeking | Given power–demand curve |
| Yan et al. [21] | Minimize hydrogen consumption | Multimode equivalent energy consumption | Given power–demand curve |
| Yan et al. [22] | The lowest system energy consumption | Hierarchical control method | Given power–demand curve |
| Yan et al. [23] | Minimize hydrogen consumption | Lagrangian algorithm | Sequential optimization |
| Mendoza et al. [24] | Maximize the energy recovered during braking | A rule-based energy management strategy | Given reference speed trajectory. |
| Li et al. [25] | Maximize regenerative braking energy | Pontryagin‘s minimum principle | Sequential optimization |
| Chen et al. [26] | Minimize fuel consumption | Velocity smoothing strategy | Sequential optimization |
| Uebel et al. [27] | Minimize fuel consumption | Dynamic programming and Pontryagin’s maximum principle | Co-optimization |
| Kim et al. [28] | Minimize hydrogen consumption | Dynamic programming and Pontryagin’s maximum principle | The possible optimal control state is determined first for co-optimization |
| Peng et al. [29] | Minimize energy consumption | Dynamic programming | Co-optimization |
| Jibrin et al. [30] | Minimize hydrogen consumption | Convex optimization | Co-optimization |
| This paper | Minimize net hydrogen consumption | Mixed Integer Linear Programming | Co-optimization |
| + | − | 0 | |
|---|---|---|---|
| Train state | Traction, cruising | Braking | Coasting |
| Motoring (7) | Applied | Relaxed | Applied |
| Braking (8) | Relaxed | Applied | Applied |
| Symbol | Description | Value |
|---|---|---|
| Total mass of the train | 72.2 | |
| Total travel distance | 10 | |
| Total travel time | 450 | |
| The time of each interval | 9 | |
| Davis coefficient | 1.5 | |
| Davis coefficient | 0.006 | |
| Davis coefficient | 0.0067 | |
| Maximum acceleration | 1 | |
| Maximum deceleration | −1 | |
| Motor efficiency | 0.9 | |
| ESD efficiency | 0.95 | |
| Combustion heat value of hydrogen | 140 | |
| Maximum efficiency of fuel cell | 60% | |
| Maximum power of fuel cell | 250 | |
| Maximum power of ESD | 400 | |
| Maximum traction power | 600 | |
| Maximum braking power | 445 | |
| Maximum traction effort | 80 |
| Case 1 | Case 2 | |
|---|---|---|
| 0 | 40 | |
| 78.25 | 75.78 | |
| 78.25 | 36.27 | |
| 1067.66 | 418.54 | |
| / | 11.51 | |
| / | 137.02 | |
| 1067.66 | 751.87 |
| Case 2 | Case 3 | ||
|---|---|---|---|
| Computation time(s) | 6.65 | step 1 | 1.94 |
| step 2 | 0.19 | ||
| 64.27 | 62.28 | ||
| 36.27 | 34.58 | ||
| 418.54 | 446.11 | ||
| 751.87 | 775.87 | ||
| Case 4 | Case 5 | ||
|---|---|---|---|
| Computation time(s) | 12.71 | step 1 | 4.57 |
| step 2 | 0.06 | ||
| 66.57 | 64.52 | ||
| 39.28 | 37.15 | ||
| 459.47 | 512.99 | ||
| 784.48 | 838.85 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, G.; Wu, C.; Zhang, B.; Xue, F.; Lu, S. Net Hydrogen Consumption Minimization of Fuel Cell Hybrid Trains Using a Time-Based Co-Optimization Model. Energies 2022, 15, 2891. https://doi.org/10.3390/en15082891
Meng G, Wu C, Zhang B, Xue F, Lu S. Net Hydrogen Consumption Minimization of Fuel Cell Hybrid Trains Using a Time-Based Co-Optimization Model. Energies. 2022; 15(8):2891. https://doi.org/10.3390/en15082891
Chicago/Turabian StyleMeng, Guangzhao, Chaoxian Wu, Bolun Zhang, Fei Xue, and Shaofeng Lu. 2022. "Net Hydrogen Consumption Minimization of Fuel Cell Hybrid Trains Using a Time-Based Co-Optimization Model" Energies 15, no. 8: 2891. https://doi.org/10.3390/en15082891
APA StyleMeng, G., Wu, C., Zhang, B., Xue, F., & Lu, S. (2022). Net Hydrogen Consumption Minimization of Fuel Cell Hybrid Trains Using a Time-Based Co-Optimization Model. Energies, 15(8), 2891. https://doi.org/10.3390/en15082891