
Impedance Modeling and Stability Analysis of Three-Phase Four-Wire Inverter with Grid-Connected Operation

Abstract
:1. Introduction
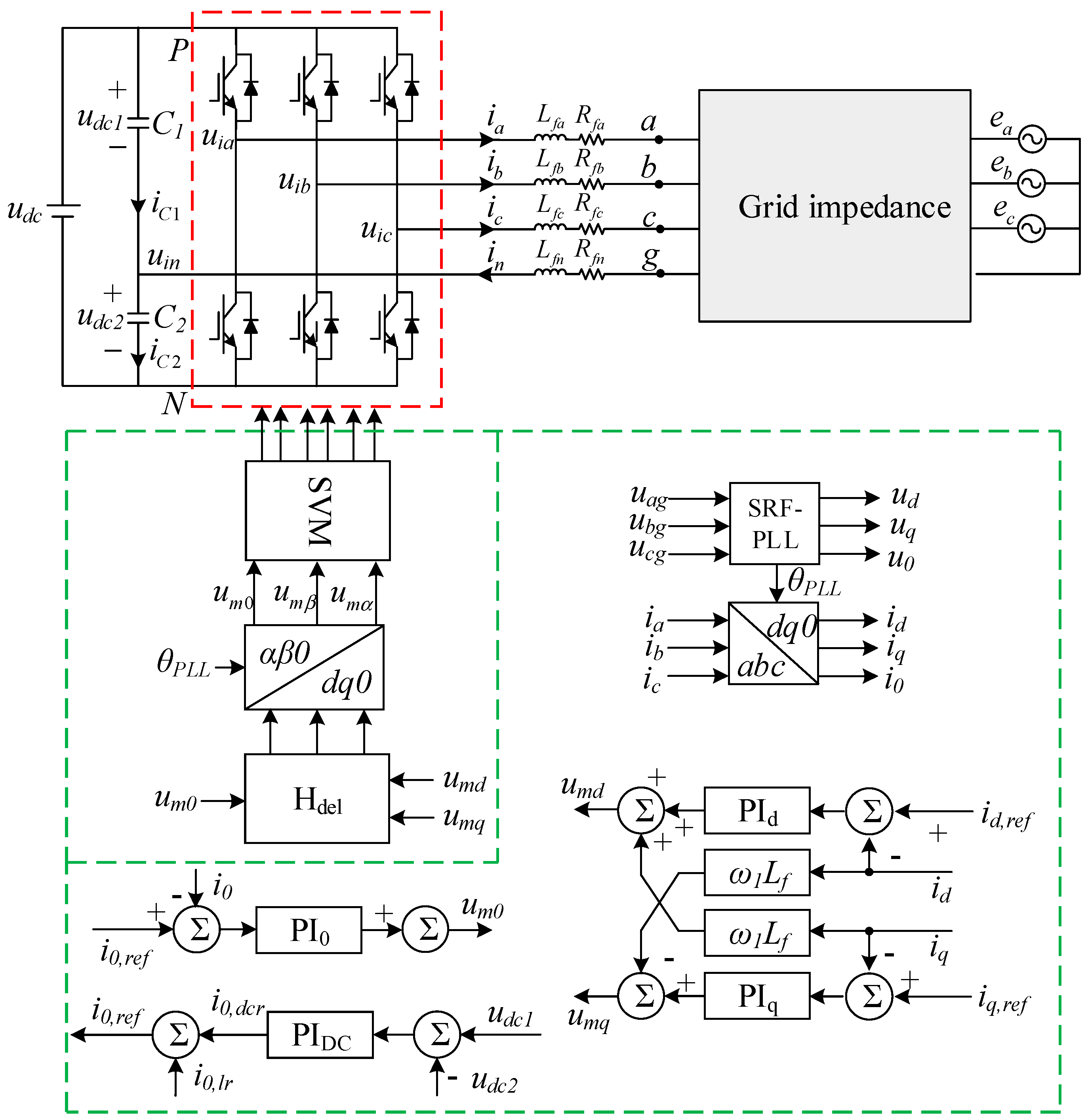
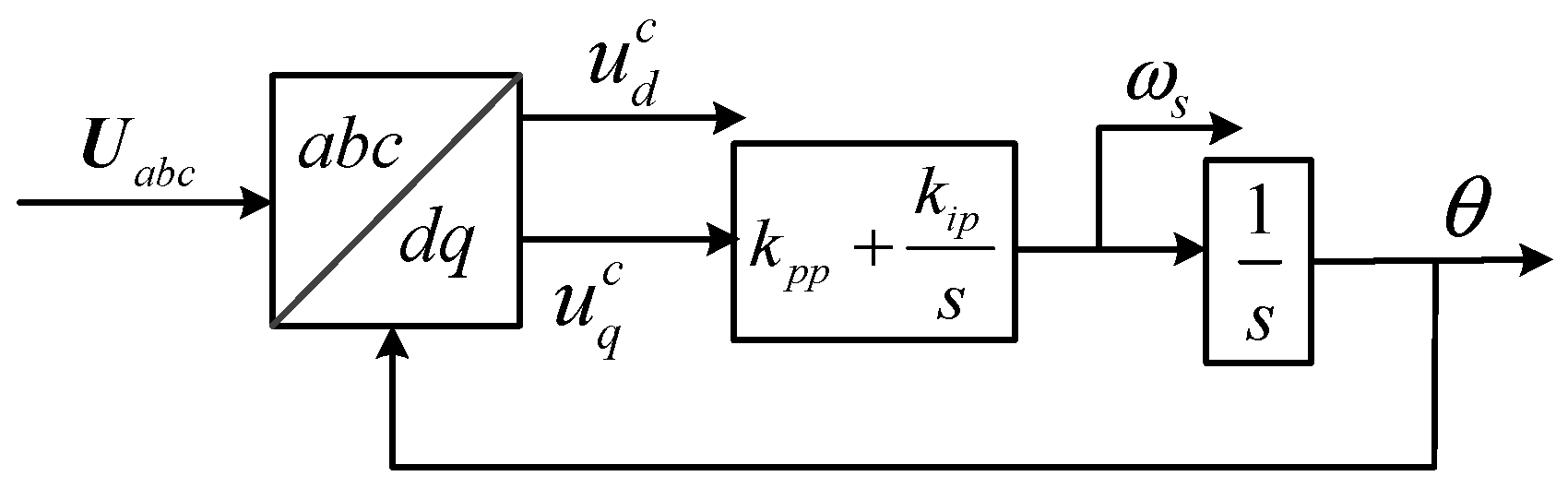
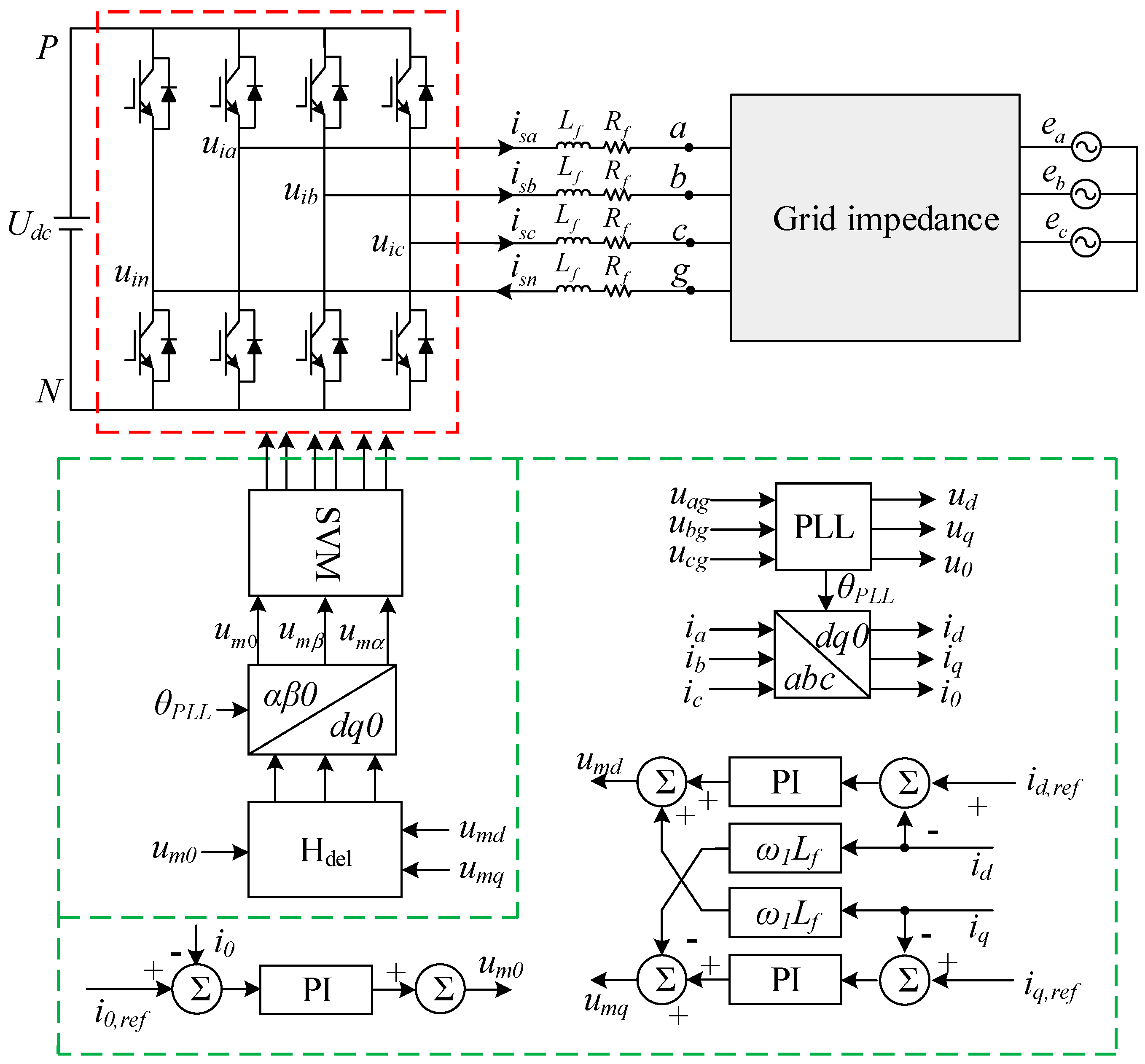
2. System Description and Impedance Modeling of TFSCI and TFGI
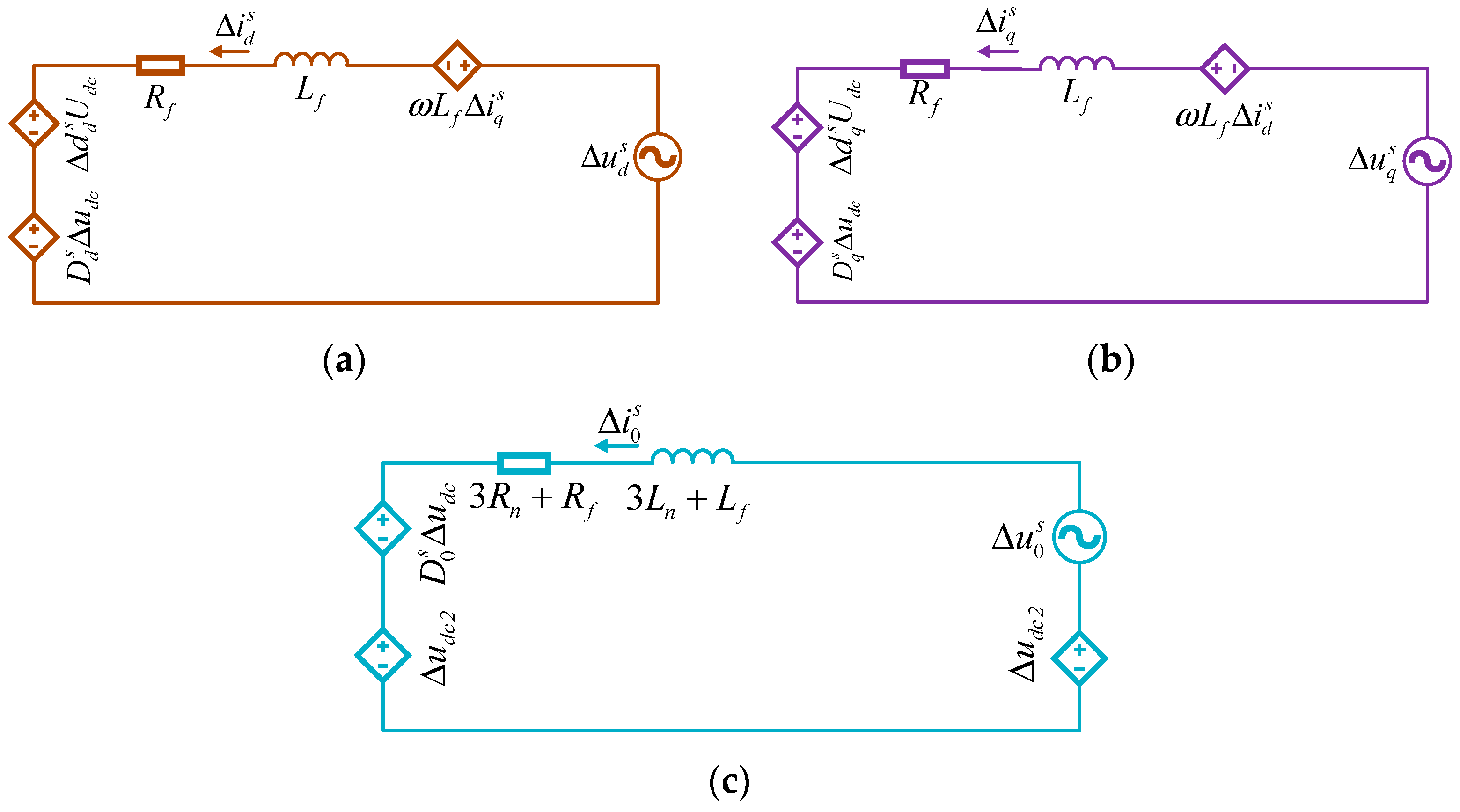
2.1. Impedance Modeling of TFSCI
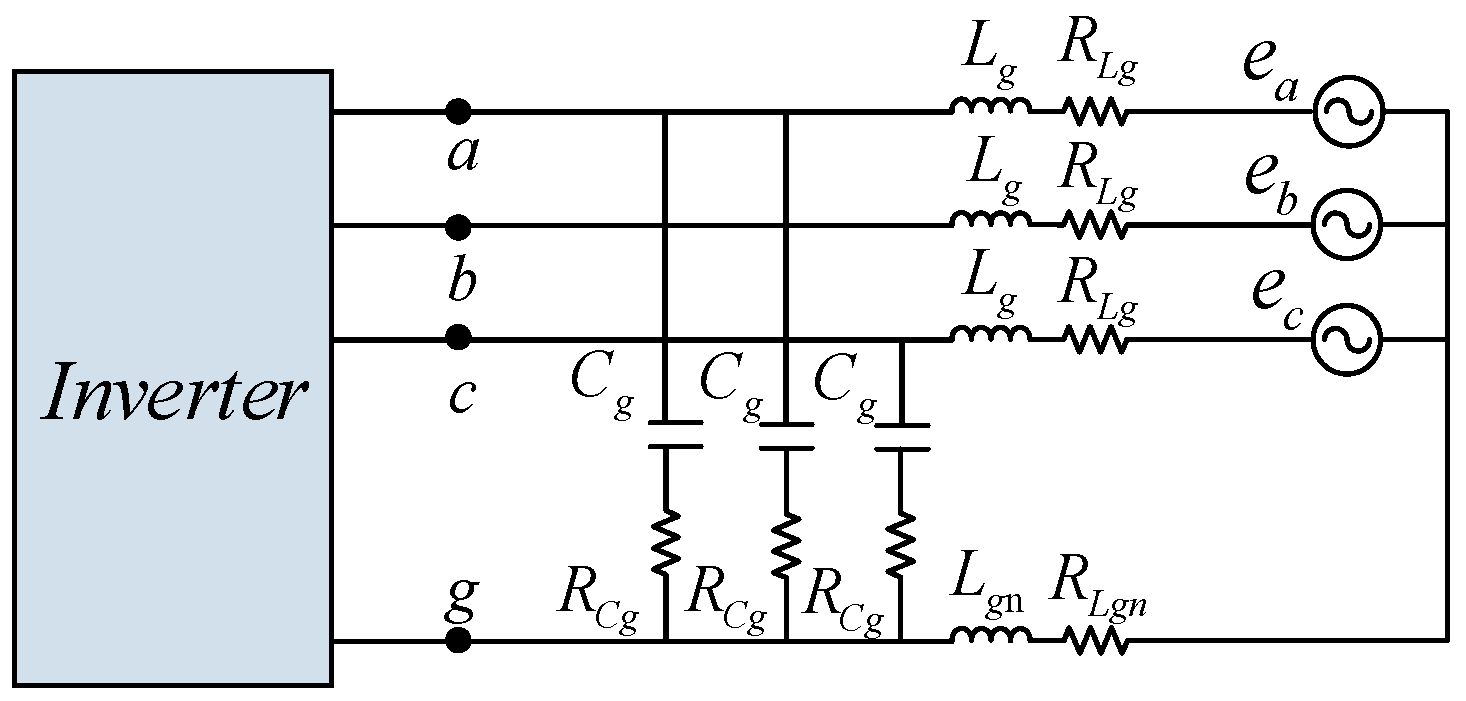
2.2. Impedance Modeling of the TFGI
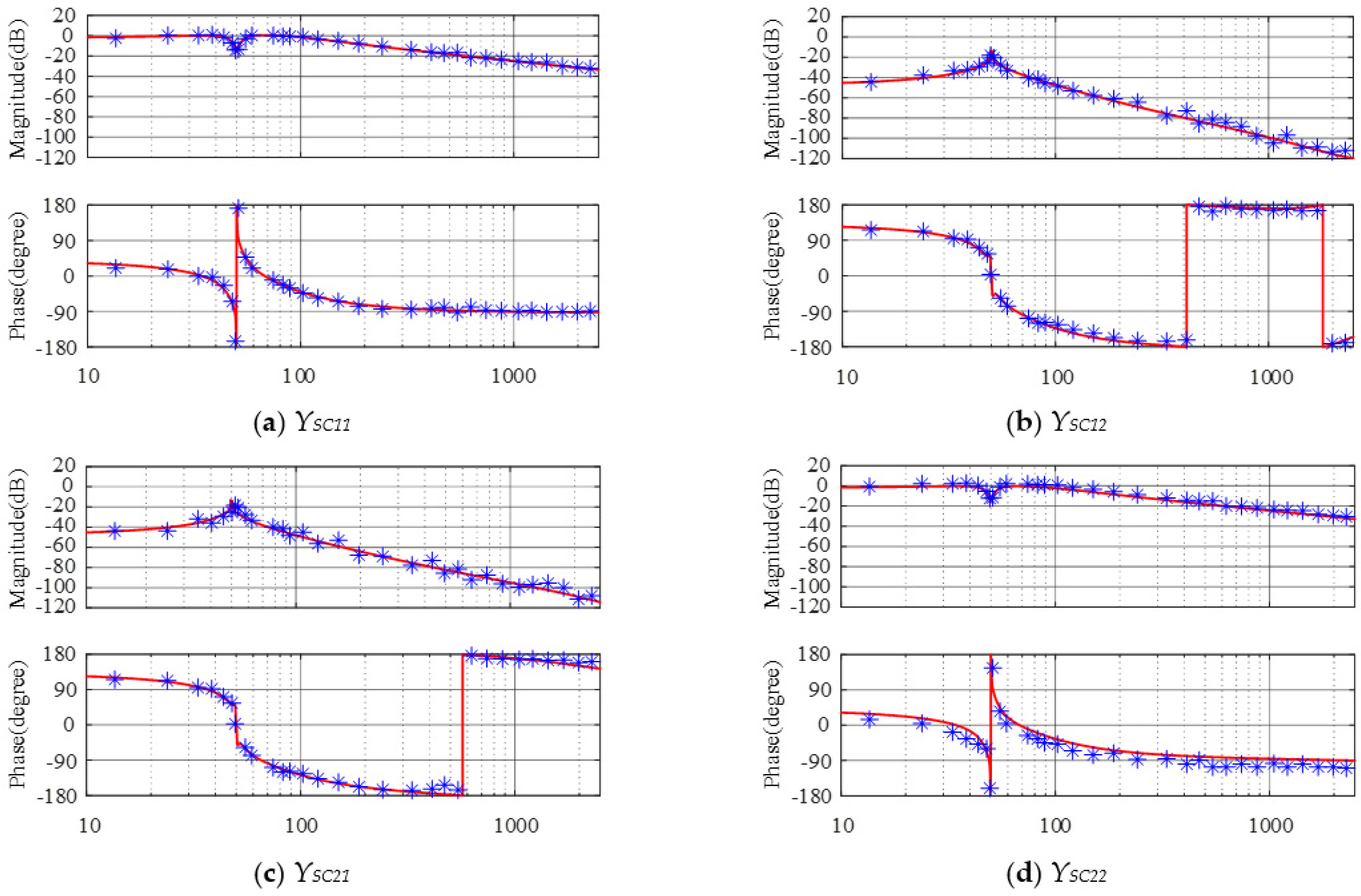
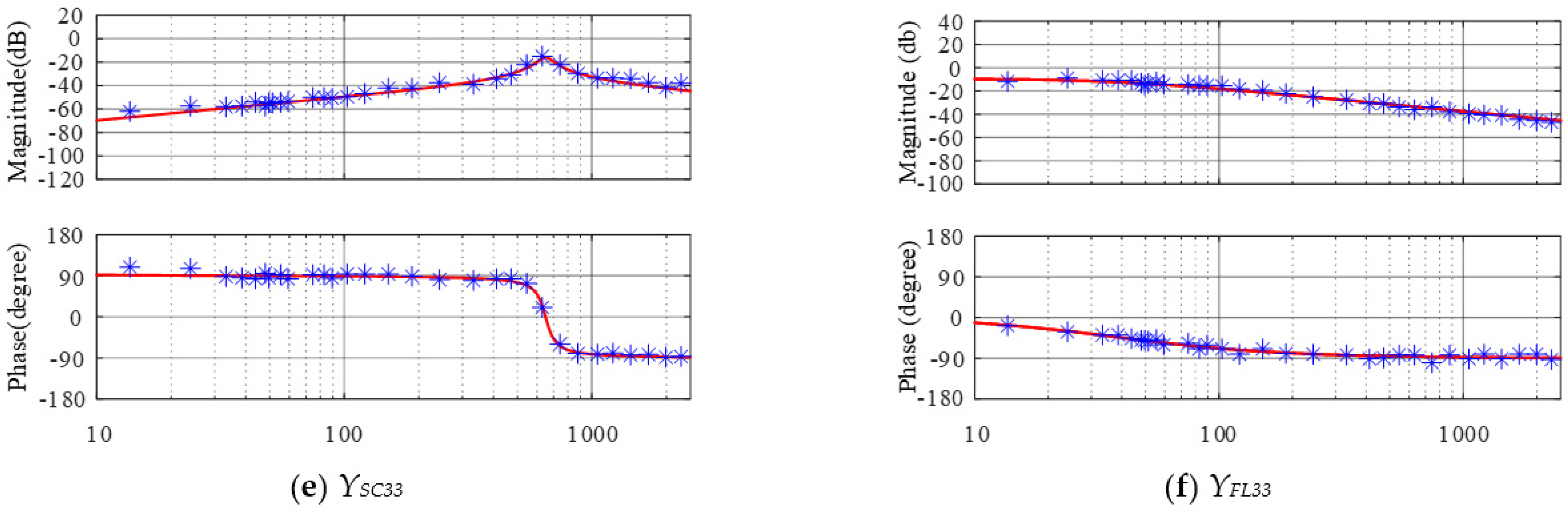
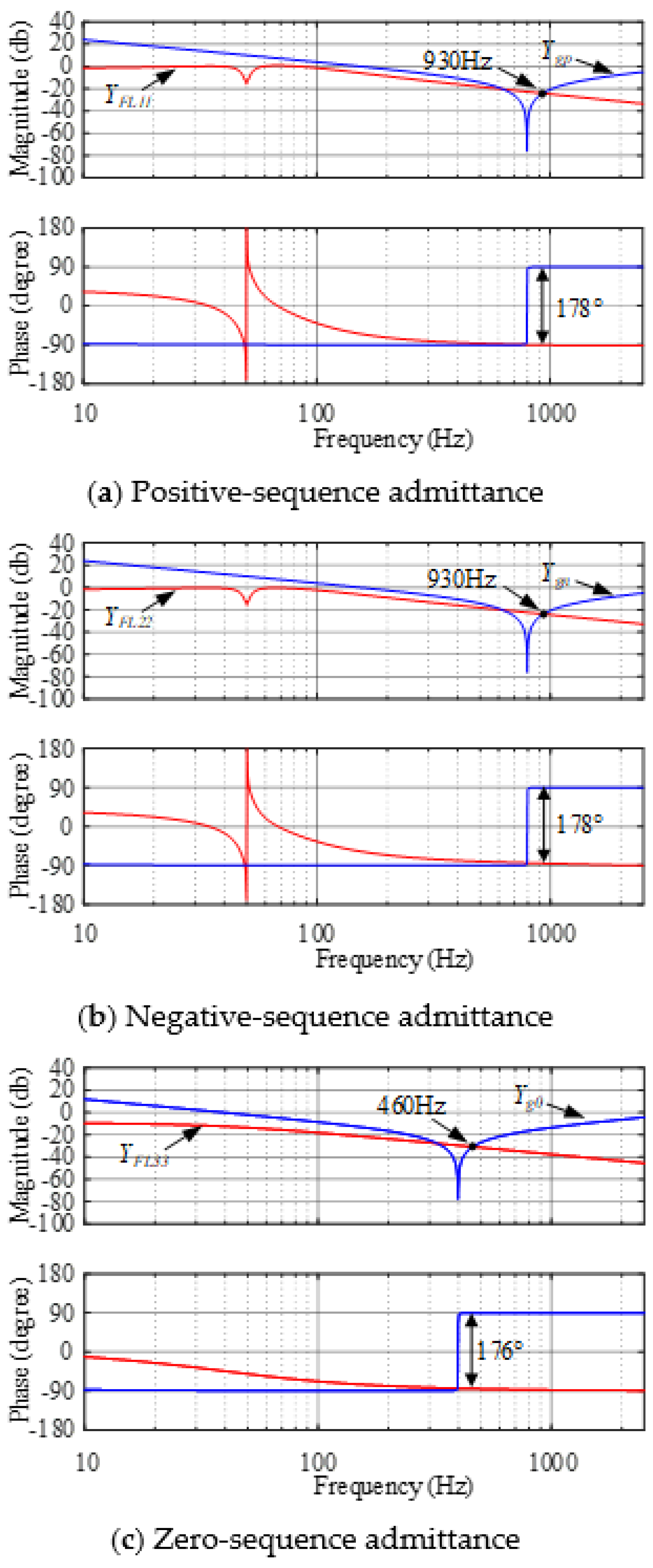
3. Comparison of Impedance Characteristics between TFSCI and TFGI
3.1. Zero-Sequence Impedance Characteristics of TFSCI
3.2. Zero-Sequence Impedance Characteristics of TFGI
4. Stability Analysis
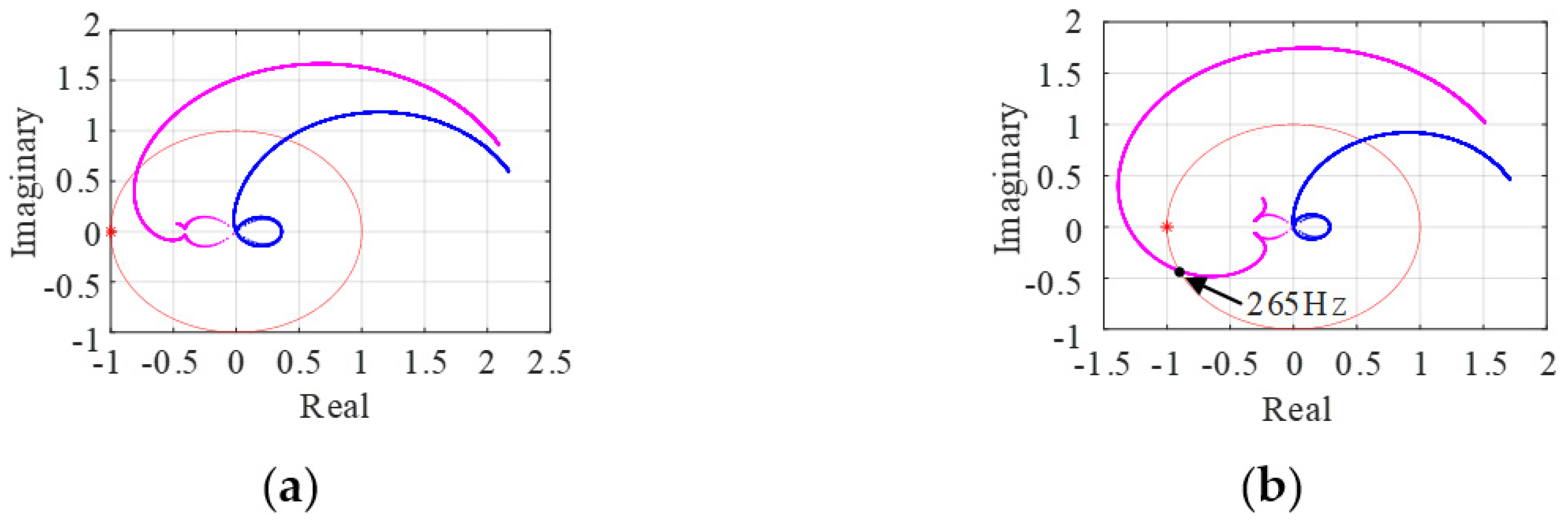
4.1. Weak Grid without Parallel Compensation
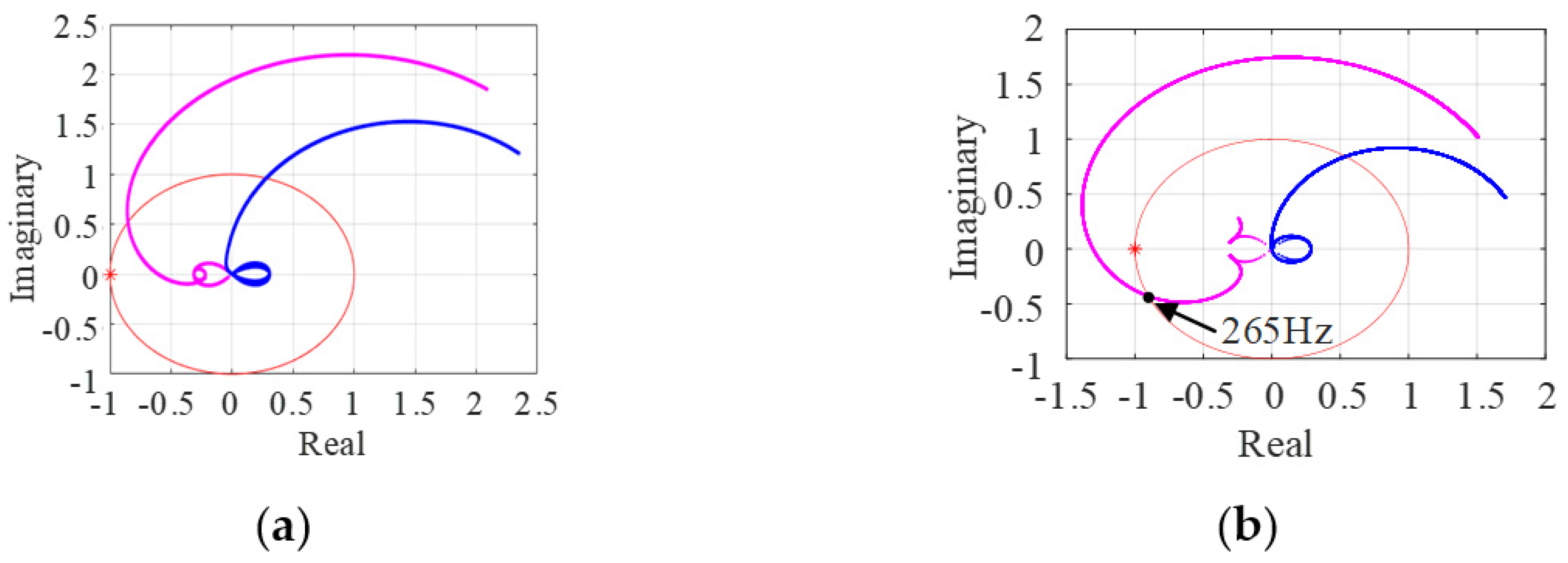
4.2. Weak Grid with Parallel Compensation
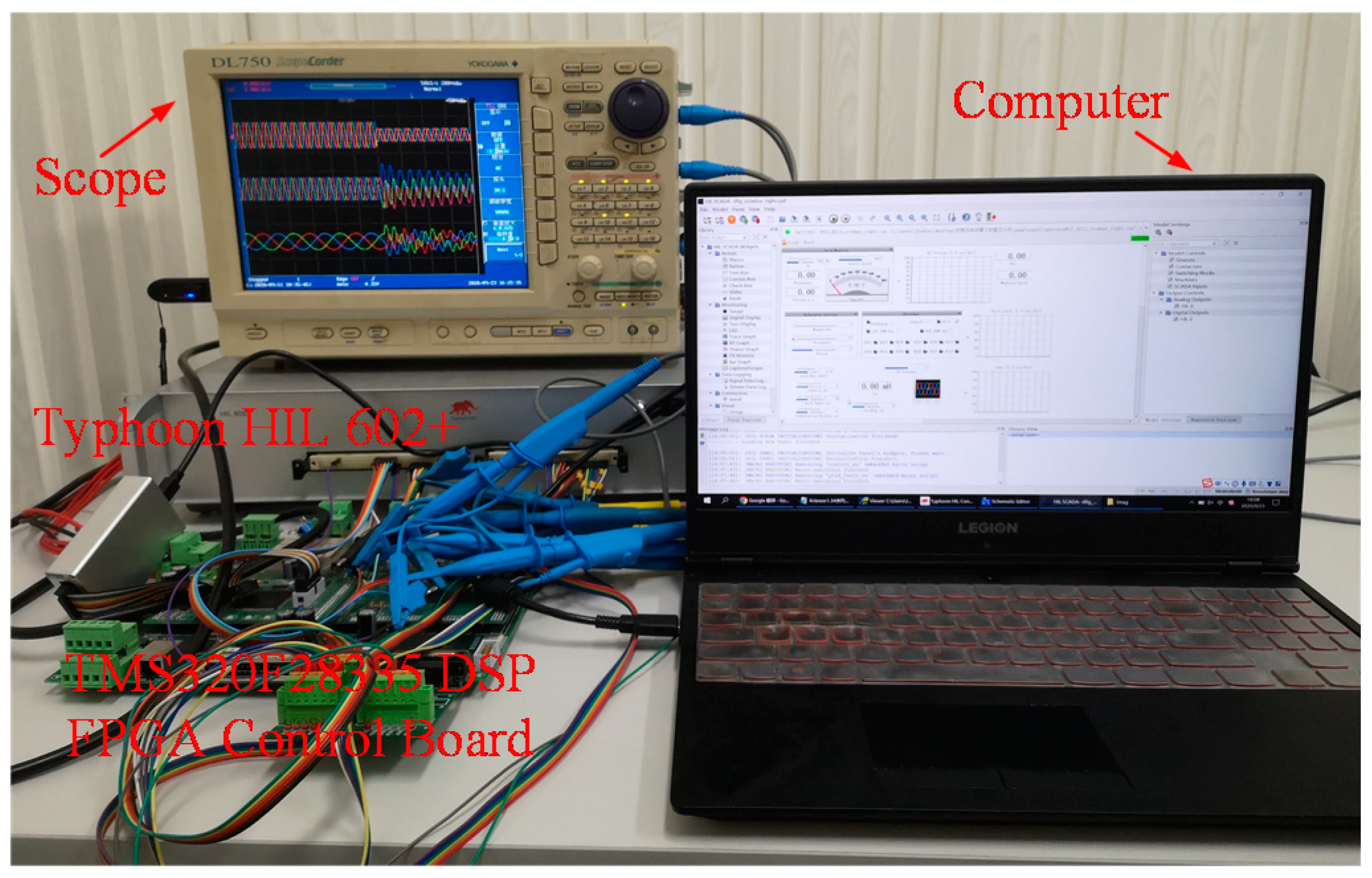
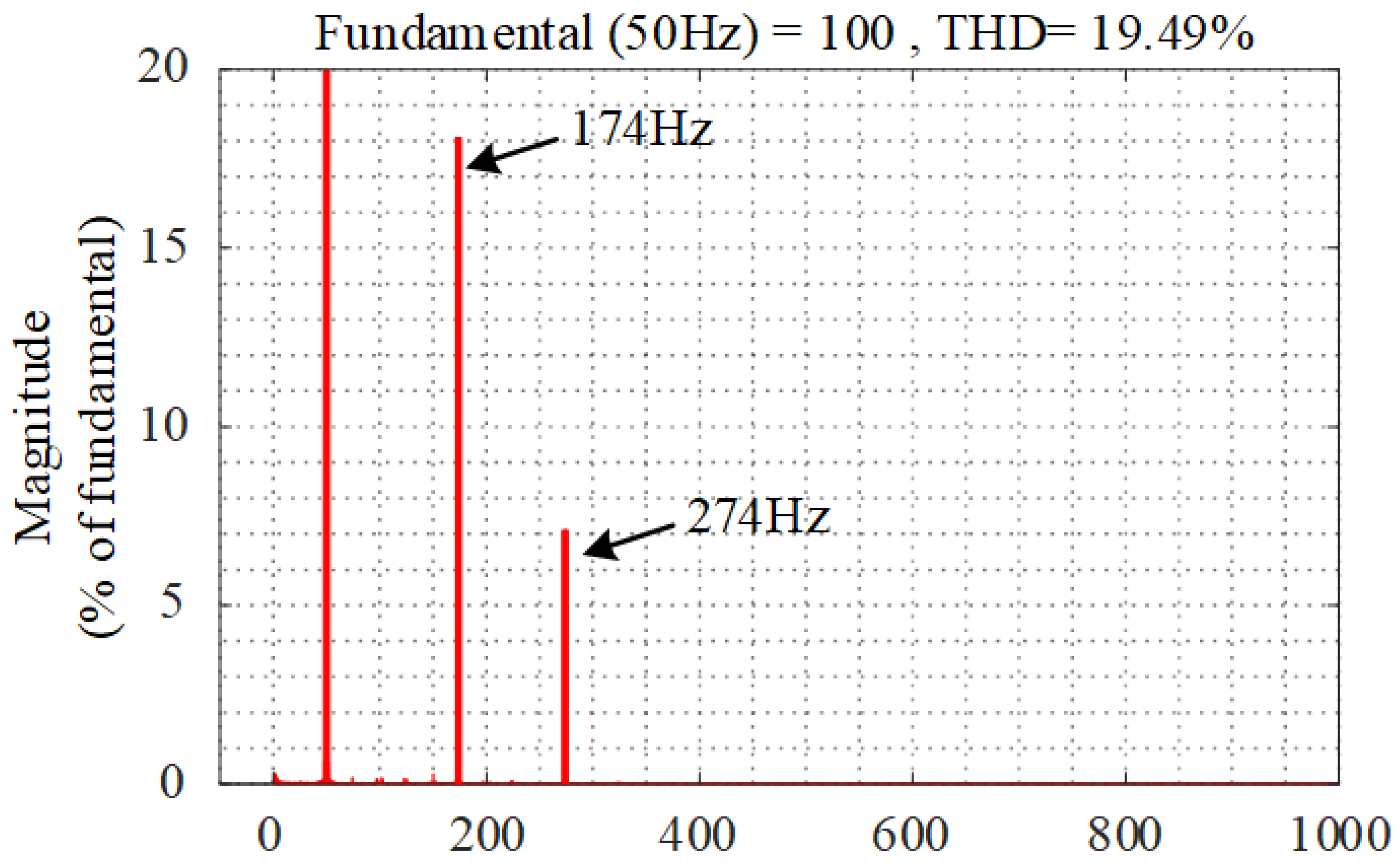
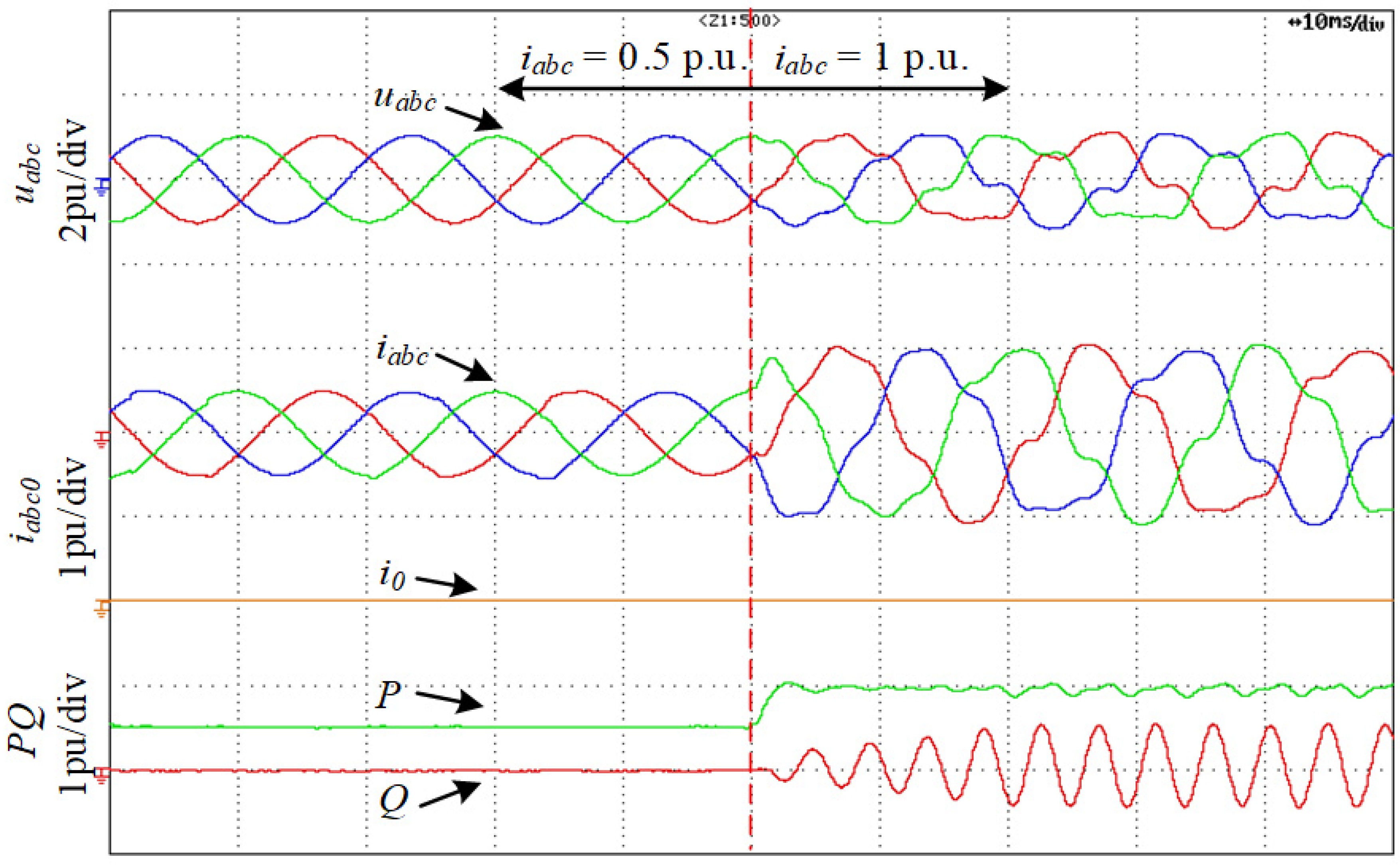
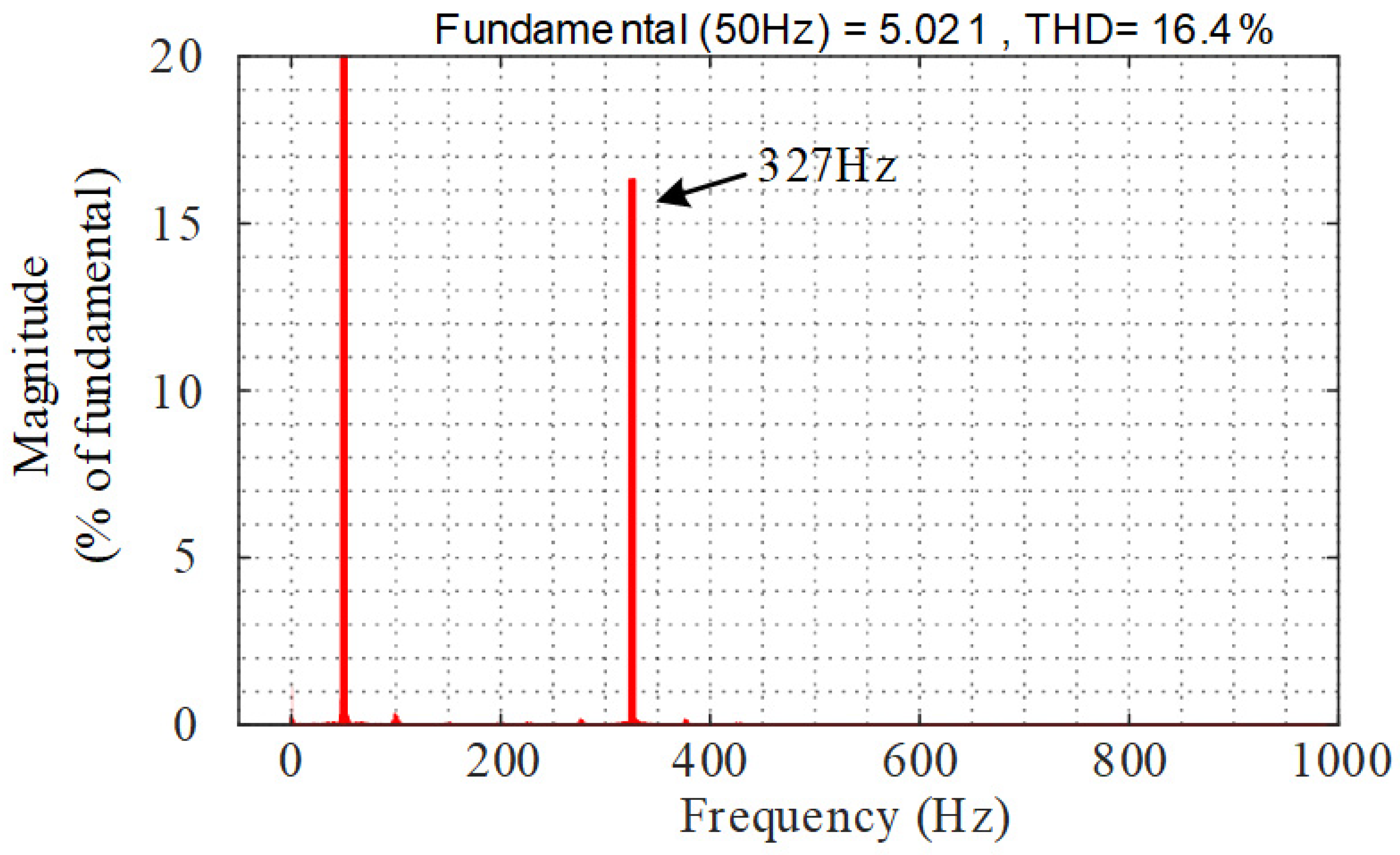
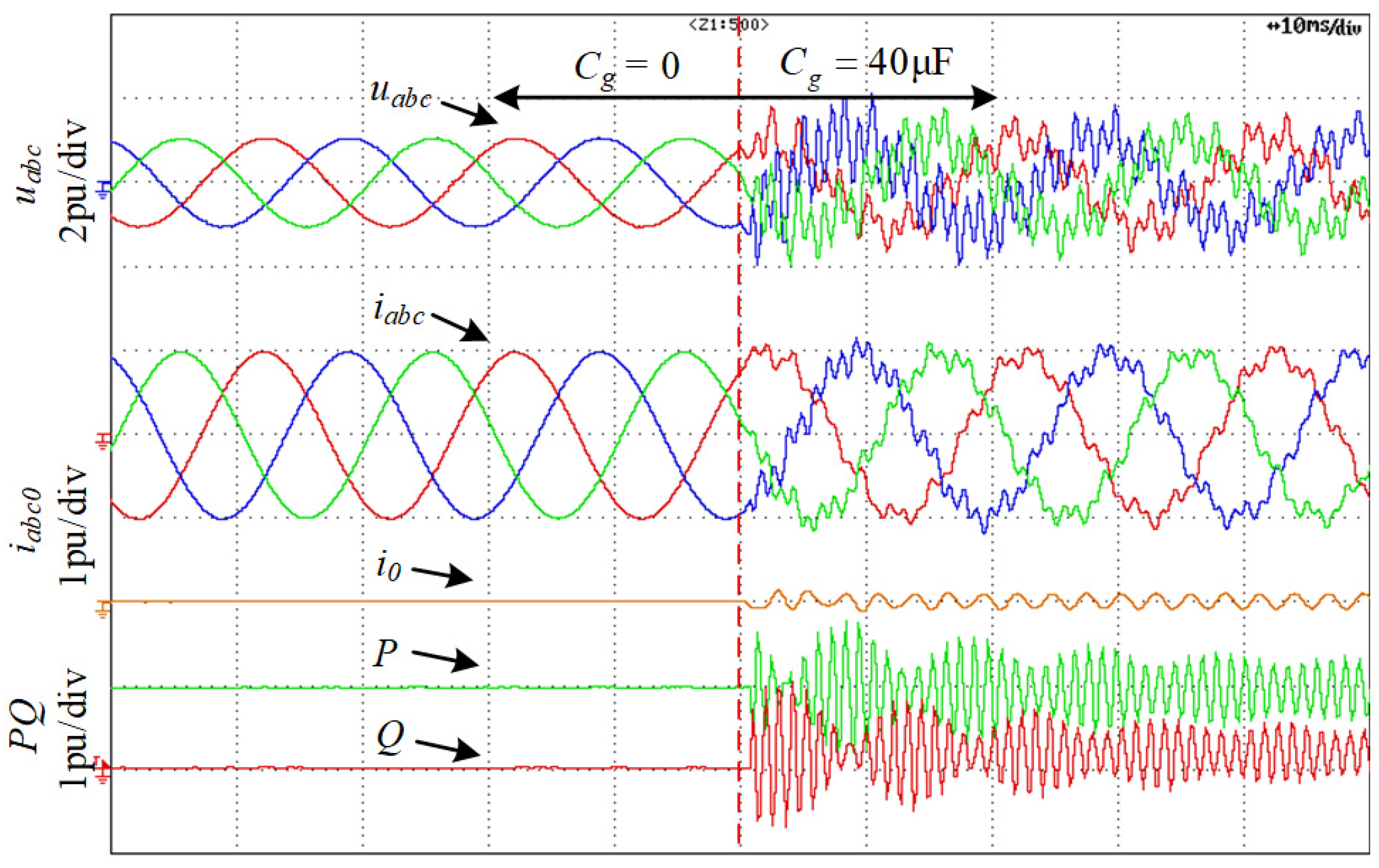
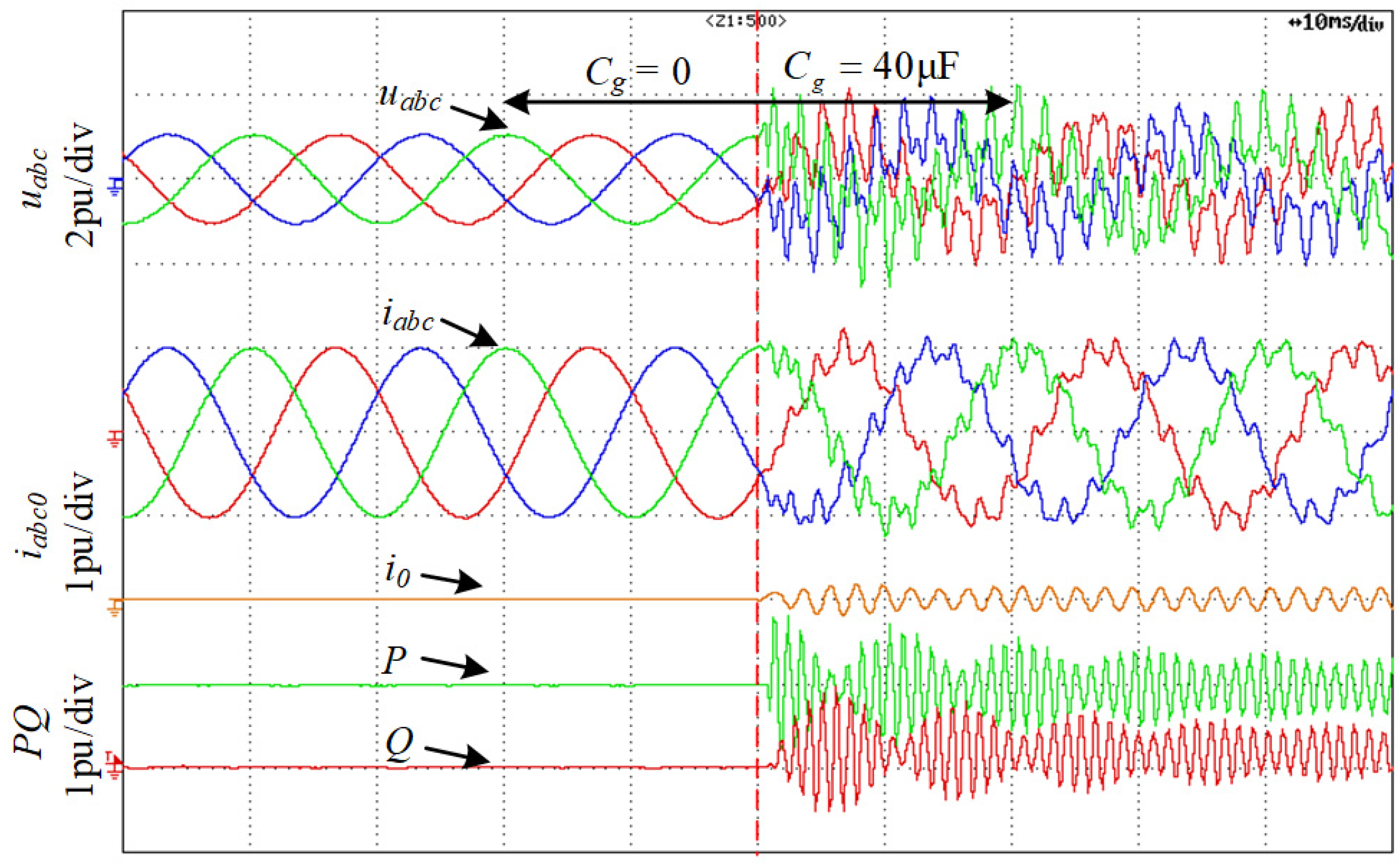
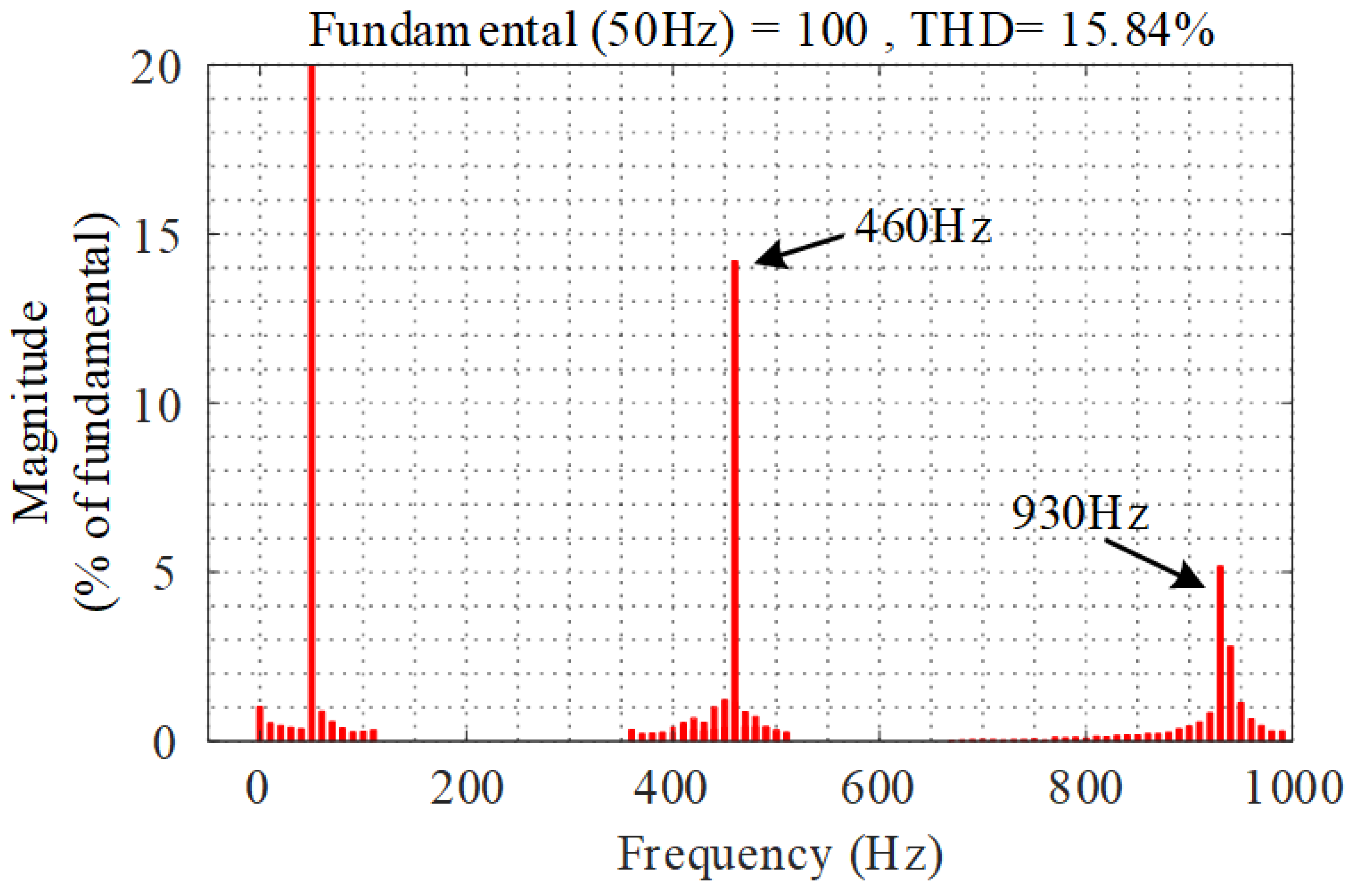
5. Experimental Verification
6. Conclusions
- (1)
- The impedance models of TFSCI and TFGI, commonly used in three-phase four-wire systems, including positive-sequence impedance, negative-sequence impedance, and zero-sequence impedance were established.
- (2)
- The similarity and difference of TFSCI impedance and TFGI impedance were revealed. The similarity lies in the similarity of the positive-sequence impedance and negative-sequence impedance. The difference is that the zero-sequence impedances are different, and these differences are mainly caused by the different zero-sequence current paths. The zero-sequence impedance of TFSCI has both capacitive and inductive characteristics, while the zero-sequence impedance of TFGI is mainly resistive and inductive.
- (3)
- The stability analysis was carried out through the impedance model, and the instability risk of the power grid under the weak grid and the parallel compensation grid were revealed. The difference in zero-sequence impedance leads to poor adaptability and higher instability risk of TFSCI compared with TFGI in the weak grid.
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
Appendix A
Appendix B
Appendix C

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| Us | Rated voltage | 380 V |
| Pn | Rated power | 30 kW |
| f1 | Fundamental frequency | 50 Hz |
| fs | Switching frequency | 5 kHz |
| Lf | Filter inductance | 3 mH |
| RLf | Parasitic resistance of filter inductance | 0.02 Ω |
| kpp | SRF-PLL proportional gain | 0.58 |
| kpi | SRF-PLL integral gain | 0.25 |
| kdip | d-axis current controller proportional gain | 1 |
| kdii | d-axis current controller integral gain | 18 |
| kqip | q-axis current controller proportional gain | 1 |
| kqii | q-axis current controller integral gain | 18 |
| k0ip | 0-axis current controller proportional gain | 3 |
| k0ii | 0-axis current controller integral gain | 54 |
| kdcp | Proportional parameter of DC voltage balance PI controller | 2.1 |
| kdci | Integral parameter of DC voltage balance PI controller | 4.2 |
| Symbol | Parameter | Value |
|---|---|---|
| Us | Rated voltage | 380 V |
| Pn | Rated power | 30 kW |
| f1 | Fundamental frequency | 50 Hz |
| fs | Switching frequency | 5 kHz |
| Lf | Filter inductance | 3 mH |
| RLf | Parasitic resistance of filter inductance | 0.02 Ω |
| kpp | SRF-PLL proportional gain | 0.58 |
| kpi | SRF-PLL integral gain | 0.25 |
| kdip | d-axis current controller proportional gain | 1 |
| kdii | d-axis current controller integral gain | 18 |
| kqip | q-axis current controller proportional gain | 1 |
| kqii | q-axis current controller integral gain | 18 |
| k0ip | 0-axis current controller proportional gain | 3 |
| k0ii | 0-axis current controller integral gain | 54 |
| Symbol | Parameter |
|---|---|
| p | Differential operator |
| s | Laplace operator |
| Xc | Variable in the controller dq0 frame |
| Xs | Variable in the system dq0 frame |
| d | Duty ratio |
References
- Primadianto, A.; Lu, C.-N. A Review on Distribution System State Estimation. IEEE Trans. Power Syst. 2017, 32, 3875–3883. [Google Scholar] [CrossRef]
- Ahmad, F.; Rasool, A.; Ozsoy, E.; Sekar, R.; Sabanovic, A.; Elitaş, M. Distribution system state estimation—A step towards smart grid. Renew. Sustain. Energy Rev. 2018, 81, 2659–2671. [Google Scholar] [CrossRef] [Green Version]
- Cavraro, G.; Arghandeh, R. Power distribution network topology detection with time-series signature verification method. IEEE Trans. Power Syst. 2018, 33, 3500–3509. [Google Scholar] [CrossRef]
- Zhou, X.; Tang, F.; Loh, P.C.; Jin, X.; Cao, W. Four-Leg Converters with Improved Common Current Sharing and Selective Voltage-Quality Enhancement for Islanded Microgrids. IEEE Trans. Power Deliv. 2016, 31, 522–531. [Google Scholar] [CrossRef] [Green Version]
- Hirve, S.; Chatterjee, K.; Fernandes, B.G.; Imayavaramban, M.; Dwari, S. PLL-Less Active Power Filter Based on One-Cycle Control for Compensating Unbalanced Loads in Three-Phase Four-Wire System. IEEE Trans. Power Deliv. 2007, 22, 2457–2465. [Google Scholar] [CrossRef] [Green Version]
- Morais, A.; Tofoli, F.L.; Barbi, I. Modeling, Digital Control, and Implementation of a Three-Phase Four-Wire Power Converter Used as A Power Redistribution Device. IEEE Trans. Ind. Inf. 2016, 12, 1035–1042. [Google Scholar] [CrossRef]
- Kerekes, T.; Teodorescu, R.; Liserre, M.; Klumpner, C.; Sumner, M. Evaluation of Three-Phase Transformerless Photovoltaic Inverter Topologies. IEEE Trans. Power Electron. 2009, 24, 2202–2211. [Google Scholar] [CrossRef]
- Pichan, M.; Rastegar, H. Sliding-Mode Control of Four-Leg Inverter with Fixed Switching Frequency for Uninterruptible Power Supply Applications. IEEE Trans. Ind. Electron. 2018, 64, 6805–6814. [Google Scholar] [CrossRef]
- Carlos, G.; Jacobina, C.B.; Santos, E. Investigation on Dynamic Voltage Restorers with Two DC Links and Series Converters for Three-Phase Four-Wire Systems. IEEE Trans. Ind. Appl. 2016, 52, 1608–1620. [Google Scholar] [CrossRef]
- Shukla, A.; Ghosh, A.; Joshi, A. Hysteresis current control operation of flying capacitor multilevel inverter and its application in shunt compensation of distribution systems. IEEE Trans. Power Deliv 2007, 22, 396–405. [Google Scholar] [CrossRef] [Green Version]
- Ramos-Carranza, H.A.; Medina, A.; Chang, G.W. Real-Time Shunt Active Power Filter Compensation. IEEE Trans. Power Deliv. 2008, 23, 2623–2625. [Google Scholar] [CrossRef]
- Wandhare, R.G.; Agarwal, V. Reactive power capacity enhancement of a PV-grid system to increase PV penetration level in smart grid scenario. IEEE Trans. Smart Grid. 2014, 5, 1845–1854. [Google Scholar] [CrossRef]
- Middlebrook, R.D. Measurement of loop gain in feedback systems. Int. J. Electron. 1975, 38, 485–512. [Google Scholar] [CrossRef]
- Panov, Y.; Jovanovic, M.M. Stability and dynamic performance of current-sharing control for paralleled voltage regulator modules. IEEE Trans. Power Electron. 2002, 17, 172–179. [Google Scholar] [CrossRef] [Green Version]
- Morroni, J.; Zane, R.; Maksimovic, D. An Online Stability Margin Monitor for Digitally Controlled Switched-Mode Power Supplies. IEEE Trans. Power Electron. 2009, 24, 2639–2648. [Google Scholar] [CrossRef] [Green Version]
- Bottrell, N.; Prodanovic, M.; Green, T.C. Dynamic Stability of a Microgrid with an Active Load. IEEE Trans. Power Electron. 2013, 28, 5107–5119. [Google Scholar] [CrossRef] [Green Version]
- Zeng, J.; Zhe, Z.; Qiao, W. An interconnection and damping assignment passivity-based controller for a DC–DC boost converter with a constant power load. IEEE Trans. Ind. Appl. 2014, 50, 2314–2322. [Google Scholar] [CrossRef]
- Gu, Y.; Li, W.; He, X. Passivity-Based Control of DC Microgrid for Self-Disciplined Stabilization. IEEE Trans. Power Syst. 2015, 30, 2623–2632. [Google Scholar] [CrossRef]
- Middlebrook, R.D. Input filter considerations in design and application of switching regulators. In Proceedings of the IEEE Industry Applications Society Annual Meeting, Chicago, IL, USA, 11–14 October 1976; pp. 94–107. [Google Scholar]
- Sun, J. Small-signal methods for ac distributed power systems-A review. IEEE Trans. Power Electron. 2009, 24, 2545–2554. [Google Scholar]
- Ren, Y.; Wang, X.; Chen, L.; Min, Y.; Li, G.; Wang, L.; Zhang, Y. A Strictly Sufficient Stability Criterion for Grid-Connected Converters Based on Impedance Models and Gershgorin’s Theorem. IEEE Trans. Power Deliv. 2020, 35, 1606–1609. [Google Scholar] [CrossRef]
- Song, S.; Guan, P.; Liu, B.; Lu, Y.; Goh, H. Impedance Modeling and Stability Analysis of DFIG-Based Wind Energy Conversion System Considering Frequency Coupling. Energies 2021, 14, 3243. [Google Scholar] [CrossRef]
- Xu, Y.; Nian, H.; Wang, Y.; Sun, D. Impedance Modeling and Stability Analysis of VSG Controlled Grid-Connected Converters with Cascaded Inner Control Loop. Energies 2020, 13, 5114. [Google Scholar] [CrossRef]
- Cespedes, M.; Sun, J. Impedance Modeling and Analysis of Grid-Connected Voltage-Source Converters. IEEE Trans. Power Electron. 2014, 29, 1254–1261. [Google Scholar] [CrossRef]
- Sun, J. Impedance-Based Stability Criterion for Grid-Connected Inverters. IEEE Trans. Power Electron. 2011, 26, 3075–3078. [Google Scholar] [CrossRef]
- Rygg, A.; Molinas, M.; Zhang, C.; Cai, X. A Modified Sequence-Domain Impedance Definition and Its Equivalence to the dq-Domain Impedance Definition for the Stability Analysis of AC Power Electronic Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1383–1396. [Google Scholar] [CrossRef] [Green Version]
- Nian, H.; Liao, Y.; Li, M.; Sun, D.; Xu, Y.; Hu, B. Impedance Modeling and Stability Analysis of Three-Phase Four-Leg Grid-Connected Inverter Considering Zero-Sequence. IEEE Access 2021, 9, 83676–83687. [Google Scholar] [CrossRef]
- Hu, B.; Nian, H.; Yang, J.; Li, M.; Xu, Y. High-Frequency Resonance Analysis and Reshaping Control Strategy of DFIG System Based on DPC. IEEE Trans. Power Electron. 2021, 36, 7810–7819. [Google Scholar] [CrossRef]
- Nian, H.; Yang, J.; Hu, B.; Jiao, Y.; Xu, Y.; Li, M. Stability Analysis and Impedance Reshaping Method for DC Resonance in VSCs-based Power System. IEEE Trans. Energy Convers. 2021, 36, 3344–3354. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, G.; Ye, Z.; Xia, Y.; Huang, L.; Wang, Z. Impedance Modeling and Stability Analysis of Three-Phase Four-Wire Inverter with Grid-Connected Operation. Energies 2022, 15, 2754. https://doi.org/10.3390/en15082754
Feng G, Ye Z, Xia Y, Huang L, Wang Z. Impedance Modeling and Stability Analysis of Three-Phase Four-Wire Inverter with Grid-Connected Operation. Energies. 2022; 15(8):2754. https://doi.org/10.3390/en15082754
Chicago/Turabian StyleFeng, Guoli, Zhihao Ye, Yihui Xia, Liming Huang, and Zerun Wang. 2022. "Impedance Modeling and Stability Analysis of Three-Phase Four-Wire Inverter with Grid-Connected Operation" Energies 15, no. 8: 2754. https://doi.org/10.3390/en15082754
APA StyleFeng, G., Ye, Z., Xia, Y., Huang, L., & Wang, Z. (2022). Impedance Modeling and Stability Analysis of Three-Phase Four-Wire Inverter with Grid-Connected Operation. Energies, 15(8), 2754. https://doi.org/10.3390/en15082754