
A Generalized Predictive Controller for a Wind Turbine Providing Frequency Support for a Microgrid

 ,
,  , and
, and 
Abstract
:
1. Introduction
- 1.
- They are applied to the rotor side converter (RSC);
- 2.
- They dislocate the operation from the MPP;
- 3.
- They rely on fixed pulse width modulation (PWM) frequencies.
2. Modeling and Control of a DFIG-Based Wind Turbine
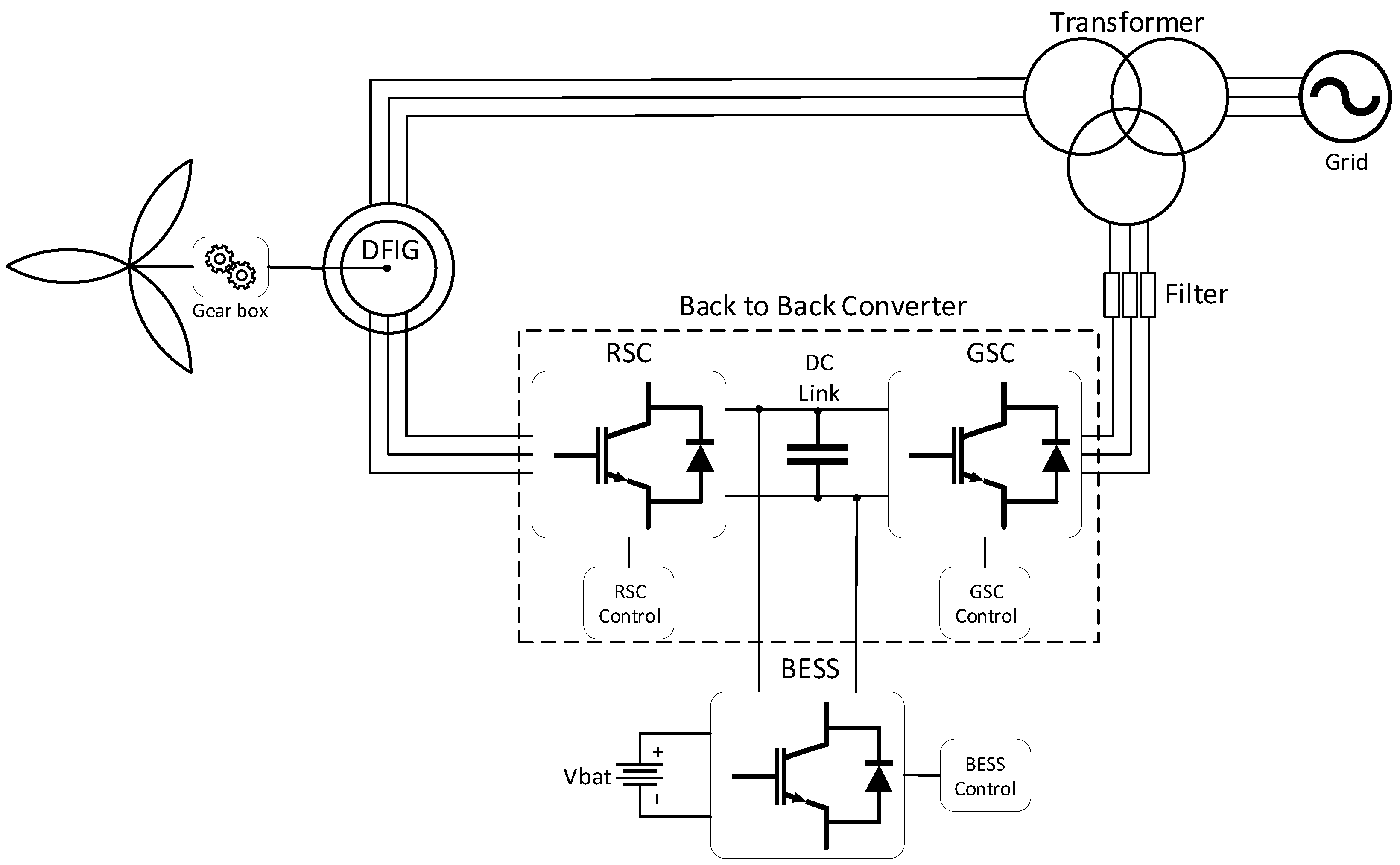
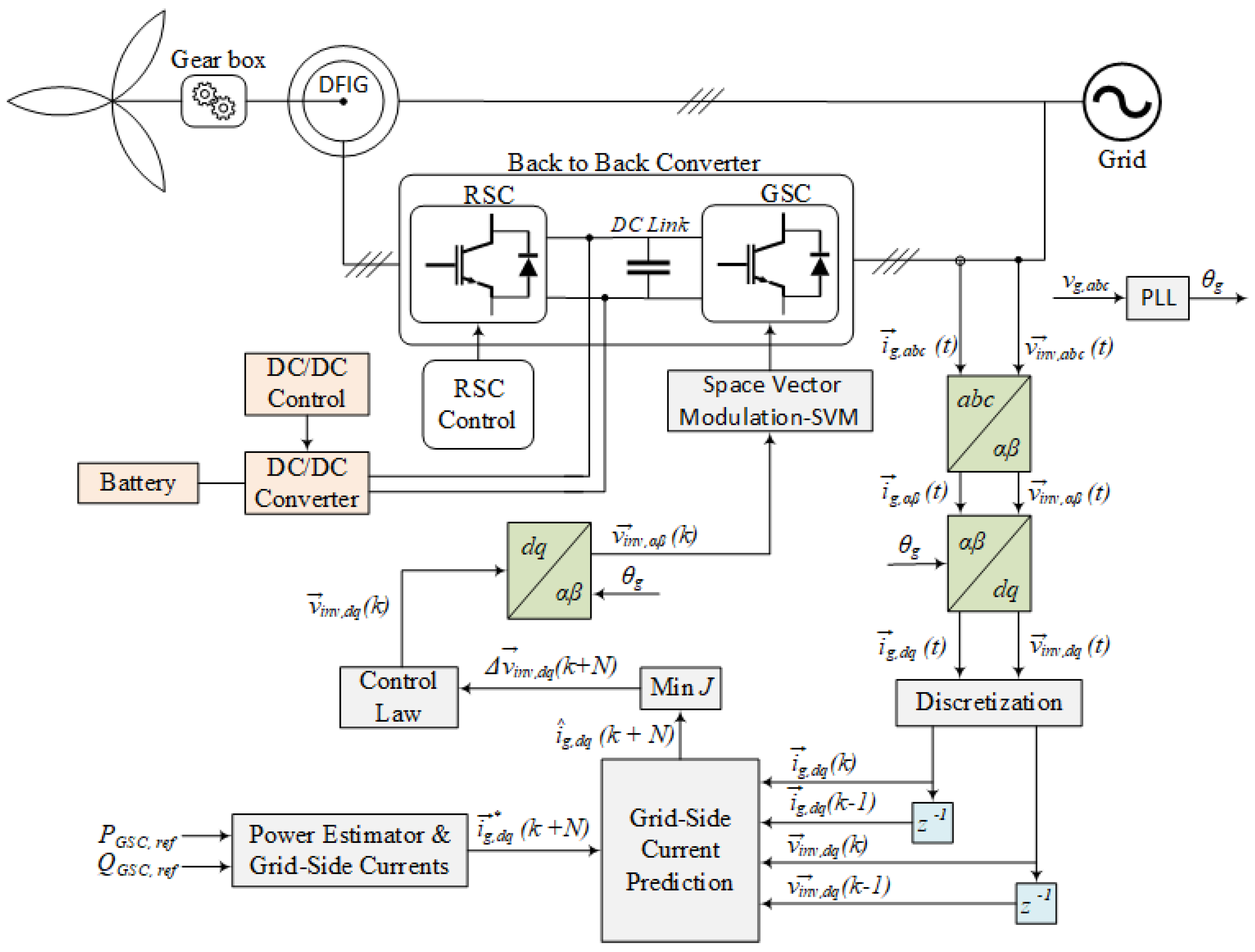
2.1. Overview of the Interconnection of a DFIG to a Microgrid
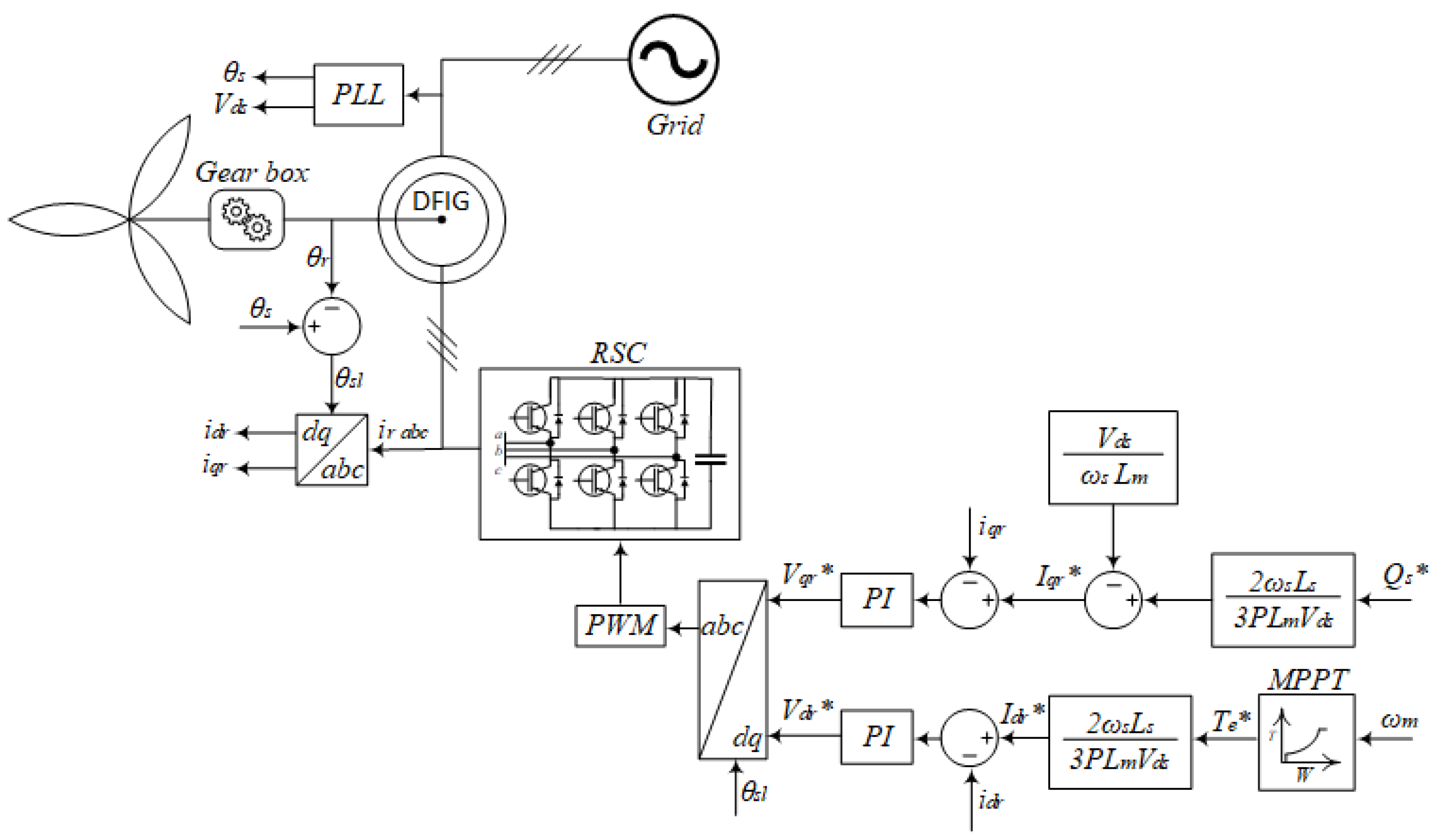
2.2. Rotor Side Dynamics and Control
2.3. Grid Side Dynamics and Control
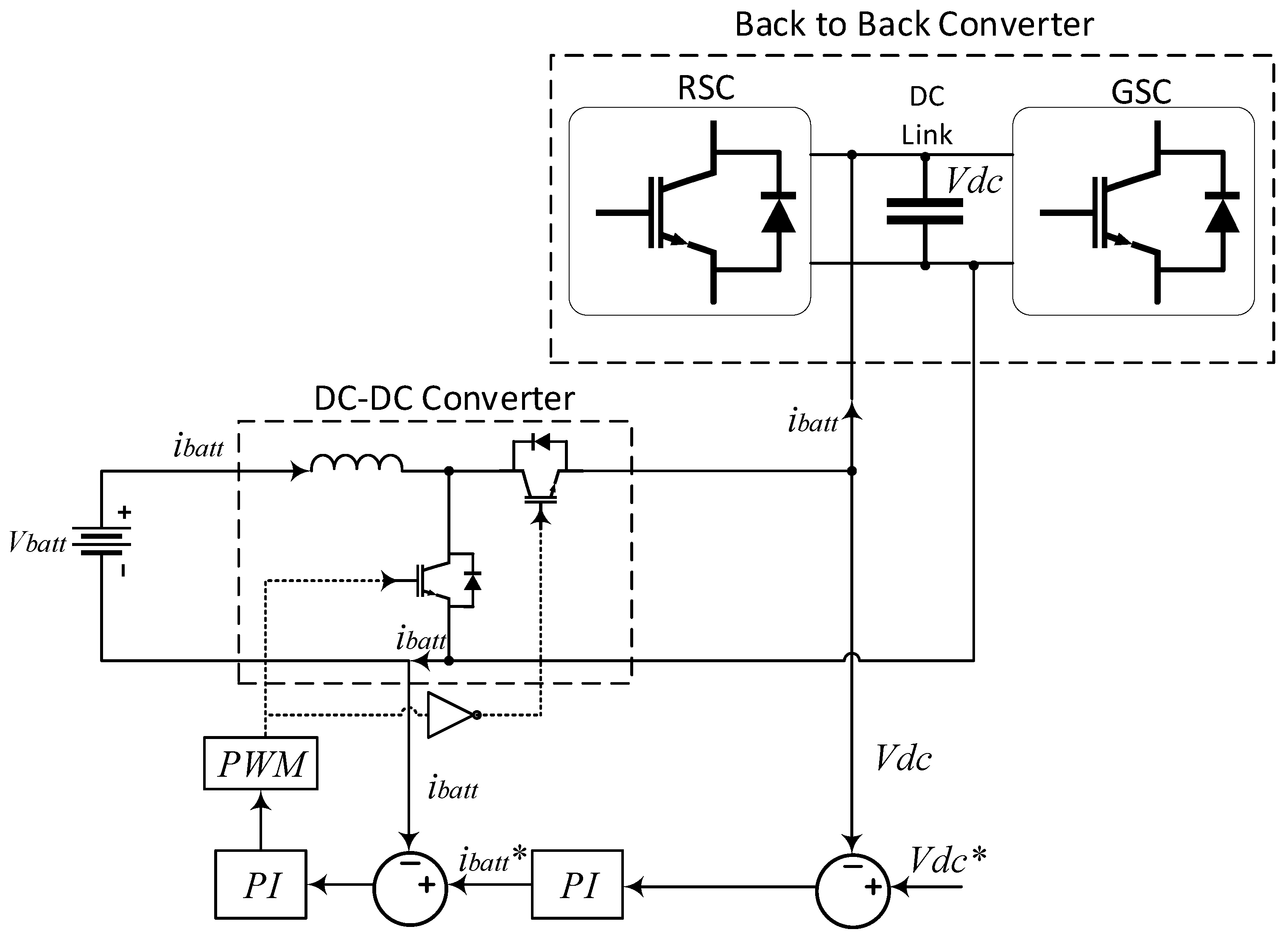
2.4. DC Voltage Dynamics and Control
2.5. Frequency Support from the Grid Side Converter
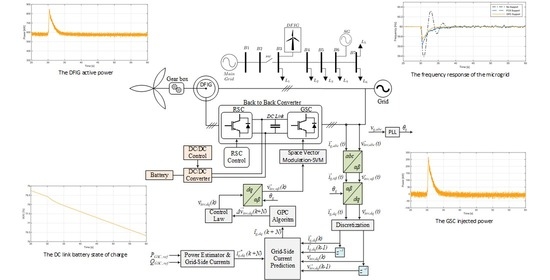
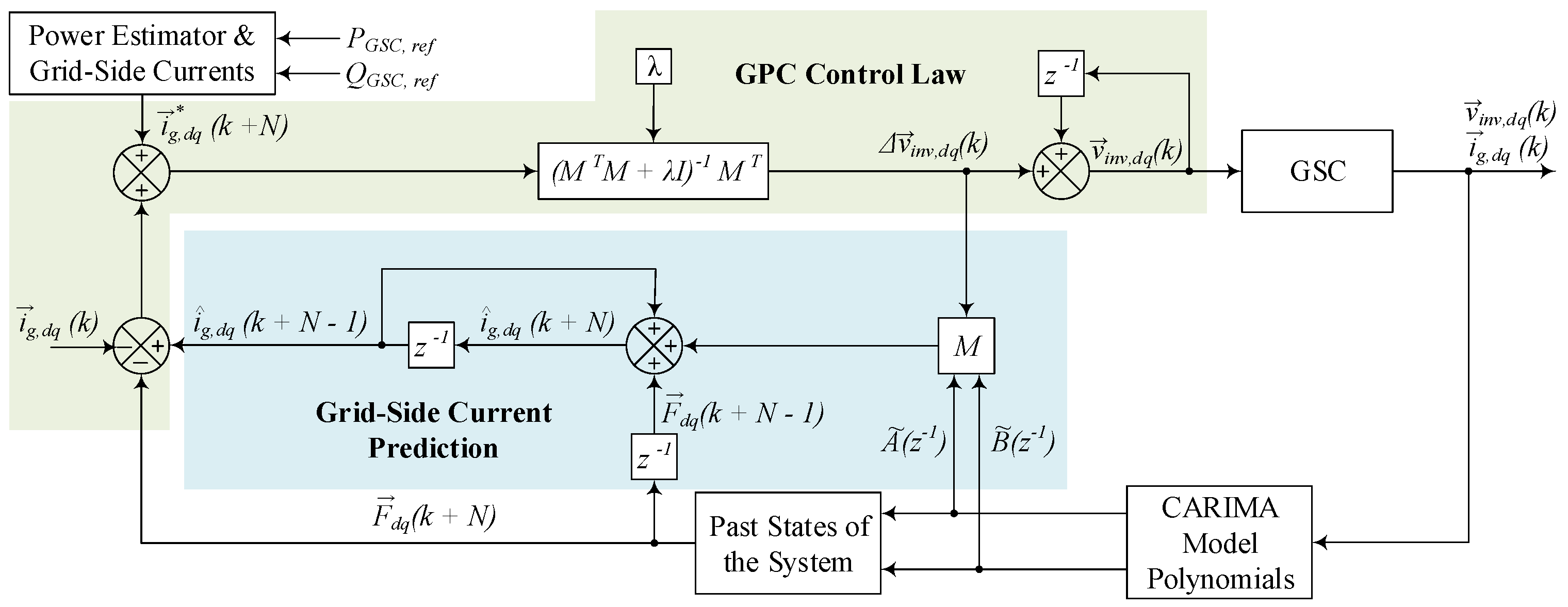
3. Generalized Predictive Controller Applied to the Grid Side Converter
4. Simulations and Results
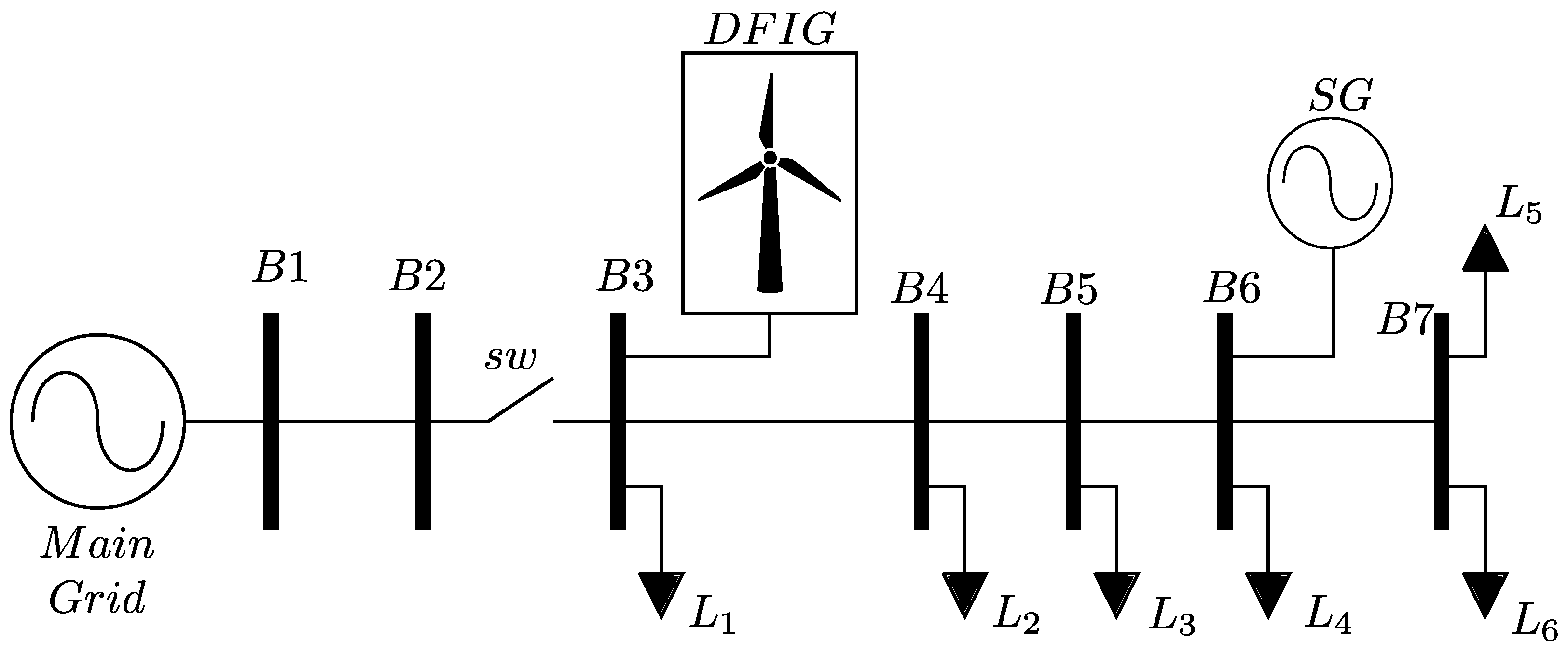
4.1. Test System
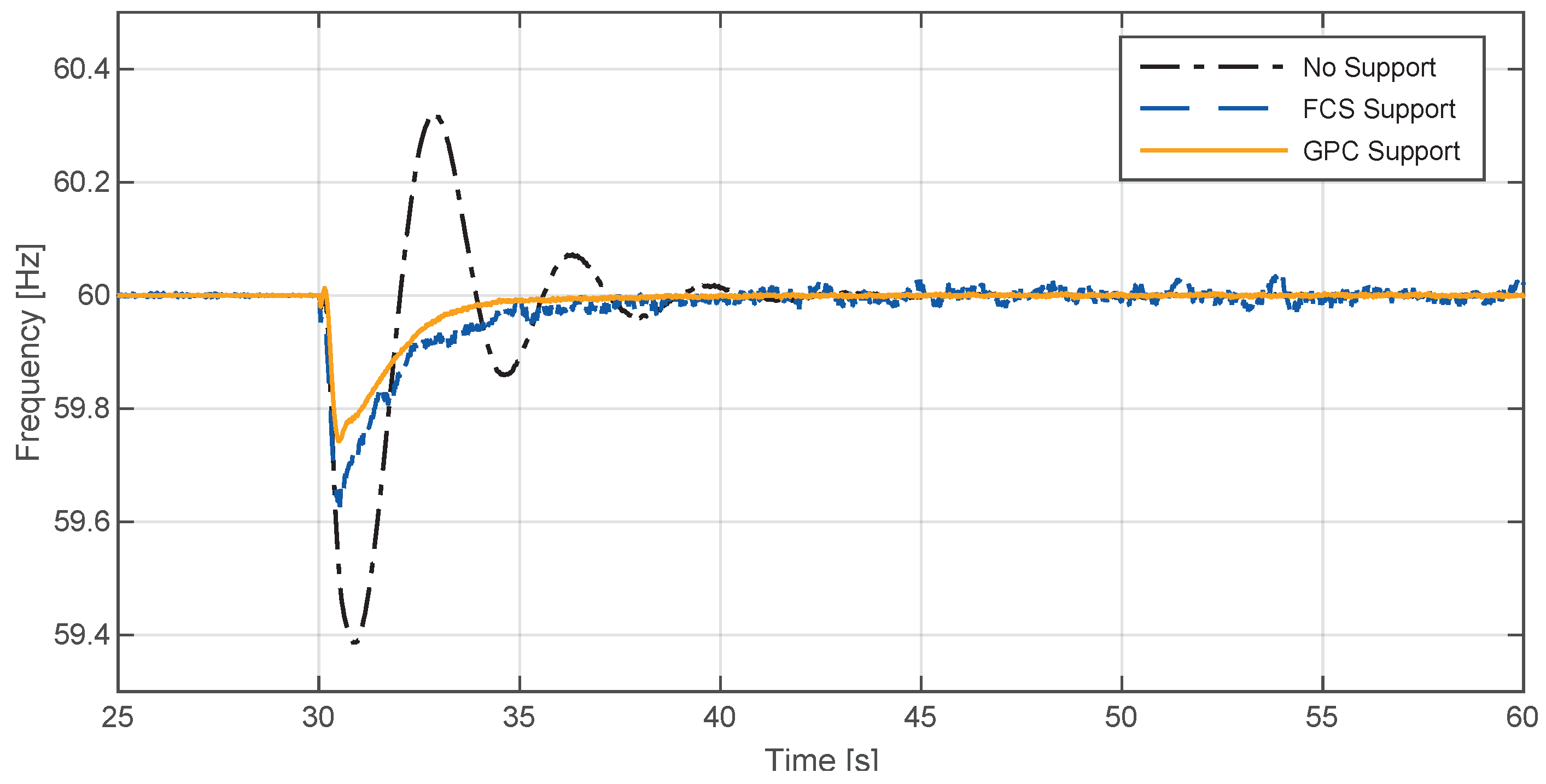
4.2. Simulation Results
4.2.1. Sub-Synchronous Operation
4.2.2. Rated Speed Operation
4.2.3. Super-Synchronous Operation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AC | Alternating Current |
| B2B | Back-to-Back Converter |
| BESS | Battery Energy Storage System |
| CARIMA | Controlled Autoregressive Moving Average |
| DC | Direct Current |
| DFIG | Doubly Fed Induction Generator |
| FCS | Finite Control Set |
| GPC | Generalized Predictive Control |
| GSC | Grid Side Converter |
| MPC | Model Predictive Control |
| MPP | Maximum Power Point |
| MPPT | Maximum Power Point Tracking |
| PLL | Phase-Locked Loop |
| PWM | Pulse Width Modulation |
| RER | Renewable Energy Resource |
| RSC | Rotor Side Converter |
| SOC | State of Charge |
| SG | Synchronous Generator |
| VSC | Voltage Source Converter |
References
- Ahmed, M.; Meegahapola, L.; Vahidnia, A.; Datta, M. Stability and control aspects of microgrid Architectures–A comprehensive review. IEEE Access 2020, 8, 144730–144766. [Google Scholar] [CrossRef]
- Farrokhabadi, M.; Cañizares, C.A.; Simpson-Porco, J.W.; Nasr, E.; Fan, L.; Mendoza-Araya, P.A.; Tonkoski, R.; Tamrakar, U.; Hatziargyriou, N.; Lagos, D.; et al. Microgrid stability definitions, analysis, and examples. IEEE Trans. Power Syst. 2019, 35, 13–29. [Google Scholar] [CrossRef]
- Lasseter, B. Microgrids [distributed power generation]. In Proceedings of the 2001 IEEE Power Engineering Society Winter Meeting, Columbus, OH, USA, 28 January–1 February 2001. [Google Scholar]
- Hatziargyriou, N.; Asano, H.; Iravani, R.; Marnay, C. Microgrids. IEEE Power Energy Mag. 2007, 5, 78–94. [Google Scholar] [CrossRef]
- Lasseter, R.H.; Chen, Z.; Pattabiraman, D. Grid-forming inverters: A critical asset for the power grid. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 925–935. [Google Scholar] [CrossRef]
- Yang, D.; Kim, J.; Kang, Y.C.; Muljadi, E.; Zhang, N.; Hong, J.; Song, S.H.; Zheng, T. Temporary frequency support of a DFIG for high wind power penetration. IEEE Trans. Power Syst. 2018, 33, 3428–3437. [Google Scholar] [CrossRef]
- Gomez, L.; Grilo, A.P.; Salles, M.; Sguarezi Filho, A. Combined control of DFIG-based wind turbine and battery energy storage system for frequency response in microgrids. Energies 2020, 13, 894. [Google Scholar] [CrossRef] [Green Version]
- Gomez, L.A.; Lourenço, L.F.; Grilo, A.P.; Salles, M.B.; Meegahapola, L.; Sguarezi Filho, A.J. Primary frequency response of microgrid using doubly fed induction generator with finite control set model predictive control plus droop control and storage system. IEEE Access 2020, 8, 189298–189312. [Google Scholar] [CrossRef]
- Datta, U.; Shi, J.; Kalam, A. Primary frequency control of a microgrid with integrated dynamic sectional droop and fuzzy based pitch angle control. Int. J. Electr. Power Energy Syst. 2019, 111, 248–259. [Google Scholar] [CrossRef]
- Zhao, J.; Lyu, X.; Fu, Y.; Hu, X.; Li, F. Coordinated Microgrid Frequency Regulation Based on DFIG Variable Coefficient Using Virtual Inertia and Primary Frequency Control. IEEE Trans. Energy Convers. 2016, 31, 833–845. [Google Scholar] [CrossRef]
- Tan, Y.; Meegahapola, L.; Muttaqi, K.M. A Suboptimal Power-Point-Tracking-Based Primary Frequency Response Strategy for DFIGs in Hybrid Remote Area Power Supply Systems. IEEE Trans. Energy Convers. 2016, 31, 93–105. [Google Scholar] [CrossRef]
- Gholamrezaie, V.; Dozein, M.G.; Monsef, H.; Wu, B. An Optimal Frequency Control Method Through a Dynamic Load Frequency Control (LFC) Model Incorporating Wind Farm. IEEE Syst. J. 2018, 12, 392–401. [Google Scholar] [CrossRef]
- Han, Y.; Ha, J. Droop Control Using Impedance of Grid-Integrated DFIG within Microgrid. IEEE Trans. Energy Convers. 2019, 34, 88–97. [Google Scholar] [CrossRef]
- Van de Vyver, J.; De Kooning, J.D.M.; Meersman, B.; Vandevelde, L.; Vandoorn, T.L. Droop Control as an Alternative Inertial Response Strategy for the Synthetic Inertia on Wind Turbines. IEEE Trans. Power Syst. 2016, 31, 1129–1138. [Google Scholar] [CrossRef]
- Muljadi, E.; Gevorgian, V.; Singh, M.; Santoso, S. Understanding inertial and frequency response of wind power plants. In Proceedings of the 2012 IEEE Power Electronics and Machines in Wind Applications, Denver, CO, USA, 16–18 July 2012; pp. 1–8. [Google Scholar] [CrossRef]
- Ahmadyar, A.S.; Verbič, G. Coordinated Operation Strategy of Wind Farms for Frequency Control by Exploring Wake Interaction. IEEE Trans. Sustain. Energy 2017, 8, 230–238. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Z.; Østergaard, J.; Hill, D.J. Coordinated Control Strategies for Offshore Wind Farm Integration via VSC-HVDC for System Frequency Support. IEEE Trans. Energy Convers. 2017, 32, 843–856. [Google Scholar] [CrossRef] [Green Version]
- Ahmadyar, A.S.; Verbič, G. Control strategy for optimal participation of wind farms in primary frequency control. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Hu, Y.; Wu, Y. Approximation to Frequency Control Capability of a DFIG-Based Wind Farm Using a Simple Linear Gain Droop Control. IEEE Trans. Ind. Appl. 2019, 55, 2300–2309. [Google Scholar] [CrossRef]
- Gomez, L.; Lourenço, L.; Salles, M.; Grilo, A. Frequency support by grid connected DFIG-based wind farms. In Design, Analysis, and Applications of Renewable Energy Systems; Elsevier: Amsterdam, The Netherlands, 2021; pp. 481–496. [Google Scholar]
- Xu, Y.; Yang, D.; Huang, J.; Zhang, X.; Hua, L. Fast Stepwise Inertial Control Scheme of a DFIG for Reducing Second Frequency Drop. Appl. Sci. 2021, 11, 8259. [Google Scholar] [CrossRef]
- Vazquez, S.; Rodriguez, J.; Rivera, M.; Franquelo, L.G.; Norambuena, M. Model Predictive Control for Power Converters and Drives: Advances and Trends. IEEE Trans. Ind. Electron. 2017, 64, 935–947. [Google Scholar] [CrossRef] [Green Version]
- Sguarezi Filho, A.J. Model Predictive Control for Doubly-Fed Induction Generators and Three-Phase Power Converters; Elsevier: Amsterdam, The Netherlands, 2022. [Google Scholar]
- Mahmoud, M.S.; Oyedeji, M.O. Adaptive and predictive control strategies for wind turbine systems: A survey. IEEE/CAA J. Autom. Sin. 2019, 6, 364–378. [Google Scholar] [CrossRef]
- Sguarezi Filho, A.J.; Ruppert Filho, E. Model-Based Predictive Control Applied to the Doubly-Fed Induction Generator Direct Power Control. IEEE Trans. Sustain. Energy 2012, 3, 398–406. [Google Scholar] [CrossRef]
- Clarke, D.W.; Mohtadi, C.; Tuffs, P. Generalized predictive control Part I. The basic algorithm. Automatica 1987, 23, 137–148. [Google Scholar] [CrossRef]
- Clarke, D.W.; Mohtadi, C. Properties of generalized predictive control. Automatica 1989, 25, 859–875. [Google Scholar] [CrossRef]
- Zhang, L.; Norman, R.; Shepherd, W. Long-range predictive control of current regulated PWM for induction motor drives using the synchronous reference frame. IEEE Trans. Control Syst. Technol. 1997, 5, 119–126. [Google Scholar] [CrossRef]
- Bouzid, M.A.; Massoum, A.; Zine, S. Generalized Predictive Control of Standalone Wind Energy Generation System. Int. J. Renew. Energy Res. 2016, 6, 220–228. [Google Scholar]
- Zhang, Z.; Hui Fang, F.G.; Rodríguez, J.; Kennel, R. Multiple-Vector Model Predictive Power Control for Grid-Tied Wind Turbine System With Enhanced Steady-State Control Performance. IEEE Trans. Ind. Electron. 2017, 64, 6287–6298. [Google Scholar] [CrossRef]
- Kennel, R.; Linder, A.; Linke, M. Generalized predictive control (GPC)-ready for use in drive applications? In Proceedings of the 2001 IEEE 32nd Annual Power Electronics Specialists Conference, Vancouver, BC, Canada, 17–21 June 2011. [Google Scholar]
- Solís-Chaves, J.S.; Rodrigues, L.L.; Rocha-Osorio, C.; Sguarezi Filho, A.J. A long-range generalized predictive control algorithm for a DFIG based wind energy system. IEEE/CAA J. Autom. Sin. 2019, 6, 1209–1219. [Google Scholar] [CrossRef]
- Dias, S.V.; Silva, W.A.; Neto, T.R.; dos Reis, L.L.; Torrico, B.C.; Campos, J.C. Robust generalized predictive control applied to the mitigation of electromagnetic torque oscillations in a wind energy conversion system based on DFIG. In Proceedings of the 2016 IEEE Biennial Congress of Argentina, Buenos Aires, Argentina, 15–17 June 2016; pp. 1–6. [Google Scholar]
- Lunardi, A.S.; Solís-Chaves, J.S.; Filho, A.J.S. Predictive Direct Torque Control for a Squirrel Cage Induction Generator Grid Connected for Wind Energy Applications. IEEE Lat. Am. Trans. 2016, 14, 4454–4461. [Google Scholar] [CrossRef]
- Lunardi, A.; Conde, E.; Assis, J.; Meegahapola, L.; Fernandes, D.A.; Sguarezi Filho, A. Repetitive Predictive Control for Current Control of Grid-Connected Inverter under Distorted Voltage Conditions. IEEE Access, 2022; early access. [Google Scholar] [CrossRef]
- Eltigani, D.; Masri, S. Challenges of integrating renewable energy sources to smart grids: A review. Renew. Sustain. Energy Rev. 2015, 52, 770–780. [Google Scholar] [CrossRef]
- Wu, B.; Lang, Y.; Zargari, N.; Kouro, S. Power Conversion and Control of Wind Energy Systems; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 76. [Google Scholar]
- Ramtharan, G.; Jenkins, N.; Ekanayake, J. Frequency support from doubly fed induction generator wind turbines. IET Renew. Power Gener. 2007, 1, 3–9. [Google Scholar] [CrossRef]
- Zhang, Z.S.; Sun, Y.Z.; Lin, J.; Li, G.J. Coordinated frequency regulation by doubly fed induction generator-based wind power plants. IET Renew. Power Gener. 2012, 6, 38–47. [Google Scholar] [CrossRef]
- Yazdani, A.; Iravani, R. Voltage-Sourced Converters in Power Systems; John Wiley & Sons: Hoboken, NJ, USA, 2010; Volume 34. [Google Scholar]
- Mesbahi, T.; Ouari, A.; Ghennam, T.; Berkouk, E.M.; Rizoug, N.; Mesbahi, N.; Meradji, M. A stand-alone wind power supply with a Li-ion battery energy storage system. Renew. Sustain. Energy Rev. 2014, 40, 204–213. [Google Scholar] [CrossRef]
- Xu, G.; Xu, L.; Morrow, J. Power oscillation damping using wind turbines with energy storage systems. IET Renew. Power Gener. 2013, 7, 449–457. [Google Scholar] [CrossRef]
- Dogan, I. Microcontroller Based Applied Digital Control; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Linder, A.; Kanchan, R.; Stolze, P.; Kennel, R. Model-based Predictive Control of Electric Drives; Cuvillier: Niedersachsen, Germany, 2010. [Google Scholar]
- Rodrigues, L.L.; Vilcanqui, O.A.; Murari, A.L.; Sguarezi Filho, A.J. Predictive power control for DFIG: A FARE-based weighting matrices approach. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 967–975. [Google Scholar] [CrossRef]
- Rodrigues, L.L.; Solís-Chaves, J.S.; Vilcanqui, O.A.; Sguarezi Filho, A.J. Predictive incremental vector control for DFIG with weighted-dynamic objective constraint-handling method-PSO weighting matrices design. IEEE Access 2020, 8, 114112–114122. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load | P (kW) | Q (kVAr) | Load | P (kW) | Q (kVAr) |
|---|---|---|---|---|---|
| 40 | 15.6 | 152 | 50 | ||
| 2000 | 300 | 195 | 64 | ||
| 290 | 95 | 518 | 170 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Rated Power | 2 MW | Stator Resistance () | 0.023 p.u. |
| Stator Voltage (L-L) | 575 V | Stator Inductance () | 0.18 p.u. |
| Rotor Voltage (L-L) | 1075 V | Rotor Resistance () | 0.016 p.u. |
| DC voltage | 1050 V | Rotor Inductance () | 0.16 p.u. |
| Filter Resistance () | 0.003 p.u. | Turbine Inertia Constant | 0.685 s |
| Filter Inductance () | 0.3 p.u. | Friction | 0.1 p.u. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prieto Cerón, C.E.; Normandia Lourenço, L.F.; Solís-Chaves, J.S.; Sguarezi Filho, A.J. A Generalized Predictive Controller for a Wind Turbine Providing Frequency Support for a Microgrid. Energies 2022, 15, 2562. https://doi.org/10.3390/en15072562
Prieto Cerón CE, Normandia Lourenço LF, Solís-Chaves JS, Sguarezi Filho AJ. A Generalized Predictive Controller for a Wind Turbine Providing Frequency Support for a Microgrid. Energies. 2022; 15(7):2562. https://doi.org/10.3390/en15072562
Chicago/Turabian StylePrieto Cerón, Carlos E., Luís F. Normandia Lourenço, Juan S. Solís-Chaves, and Alfeu J. Sguarezi Filho. 2022. "A Generalized Predictive Controller for a Wind Turbine Providing Frequency Support for a Microgrid" Energies 15, no. 7: 2562. https://doi.org/10.3390/en15072562
APA StylePrieto Cerón, C. E., Normandia Lourenço, L. F., Solís-Chaves, J. S., & Sguarezi Filho, A. J. (2022). A Generalized Predictive Controller for a Wind Turbine Providing Frequency Support for a Microgrid. Energies, 15(7), 2562. https://doi.org/10.3390/en15072562