
Real-Time FPGA/CPU-Based Simulation of a Full-Electric Vehicle Integrated with a High-Fidelity Electric Drive Model



Abstract
:1. Introduction
2. Vehicle and Electric Drive Modeling
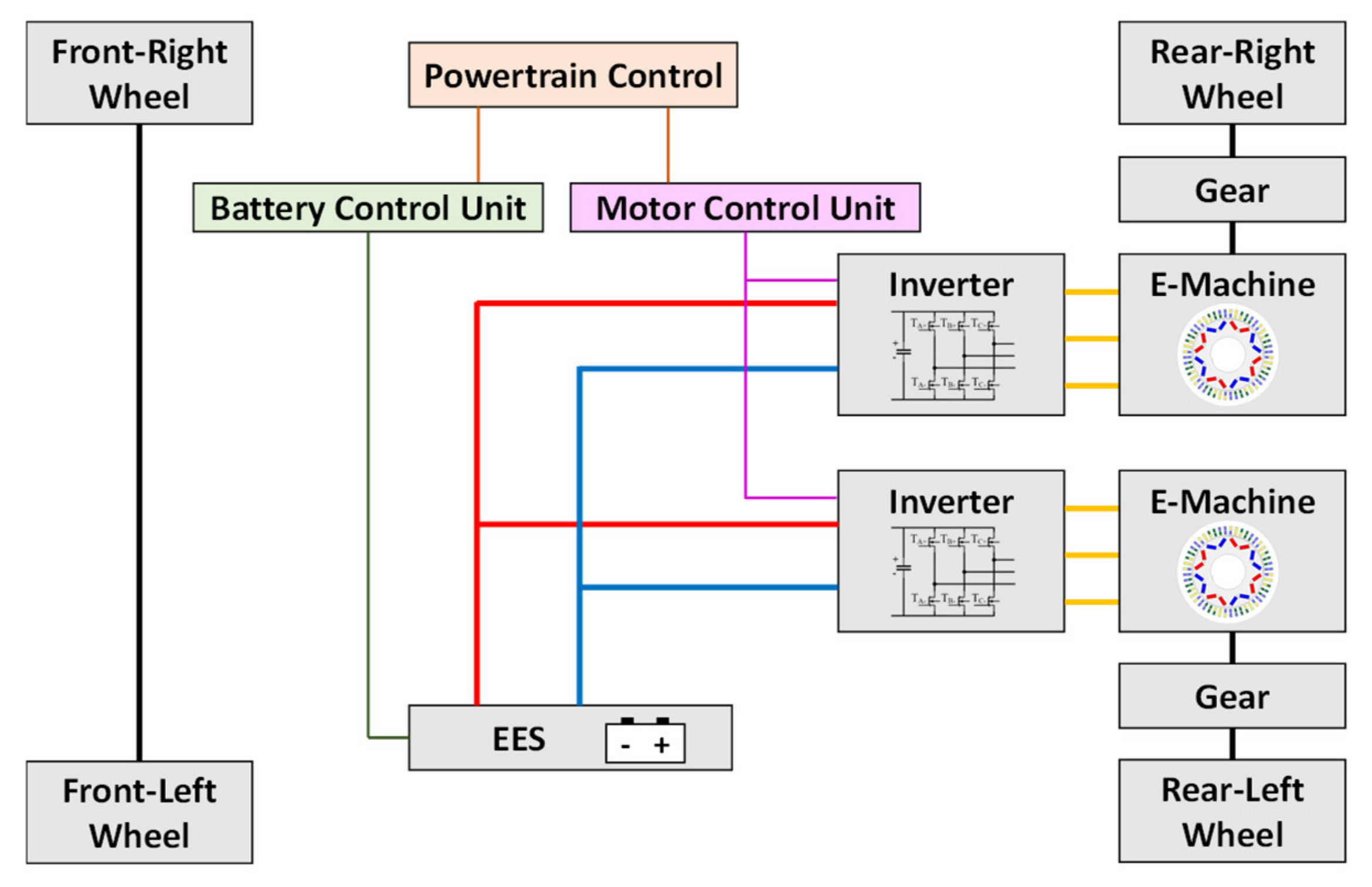
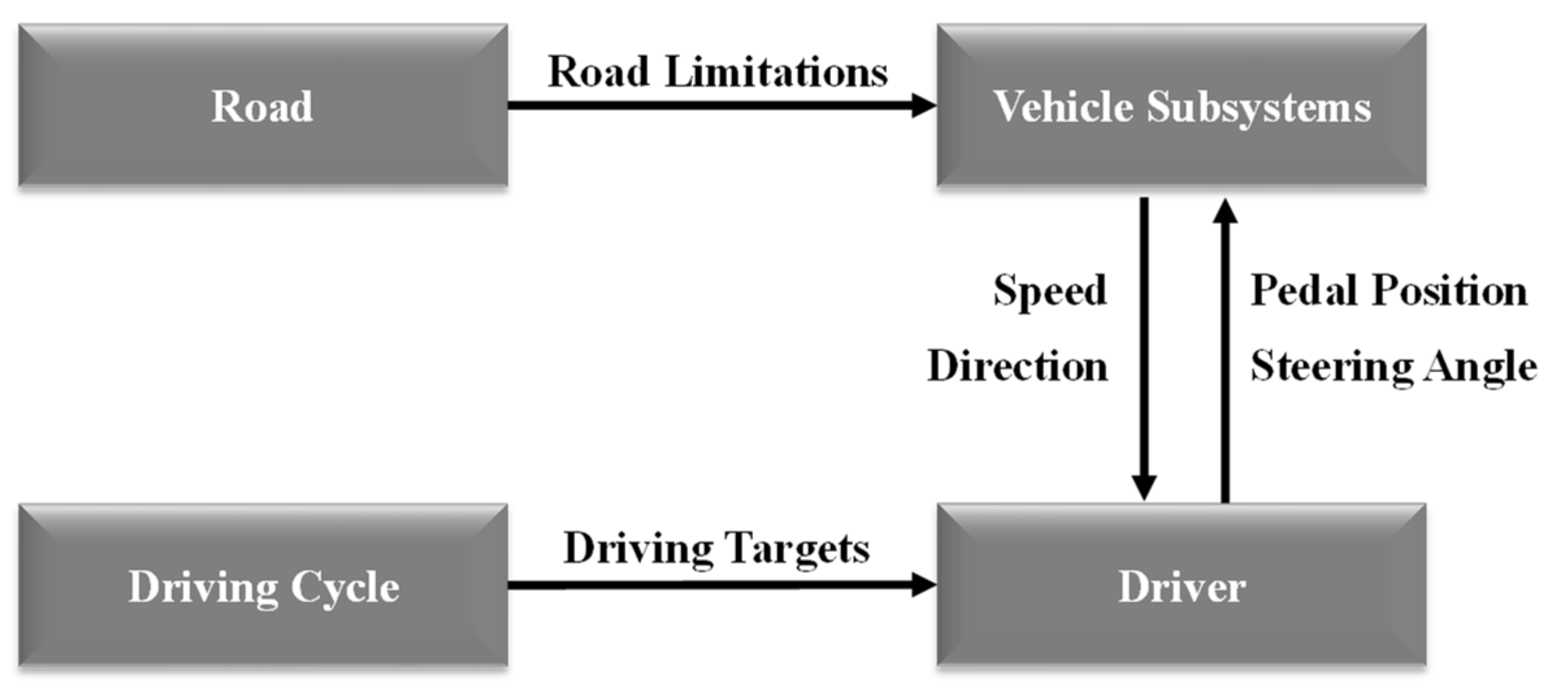
2.1. CPU-Based Full-Electric Vehicle Modeling
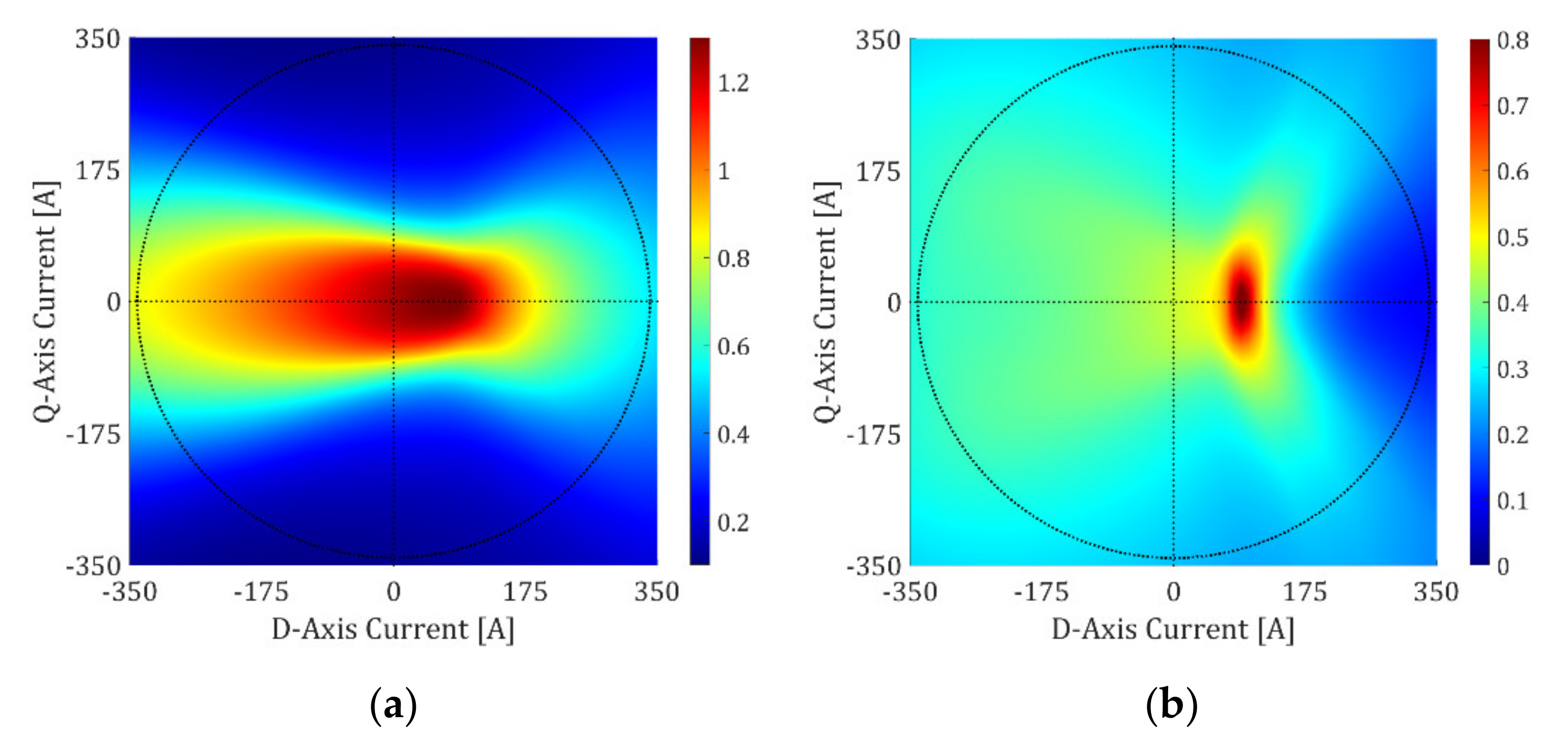
2.2. FPGA-Based Electric Drive Modeling
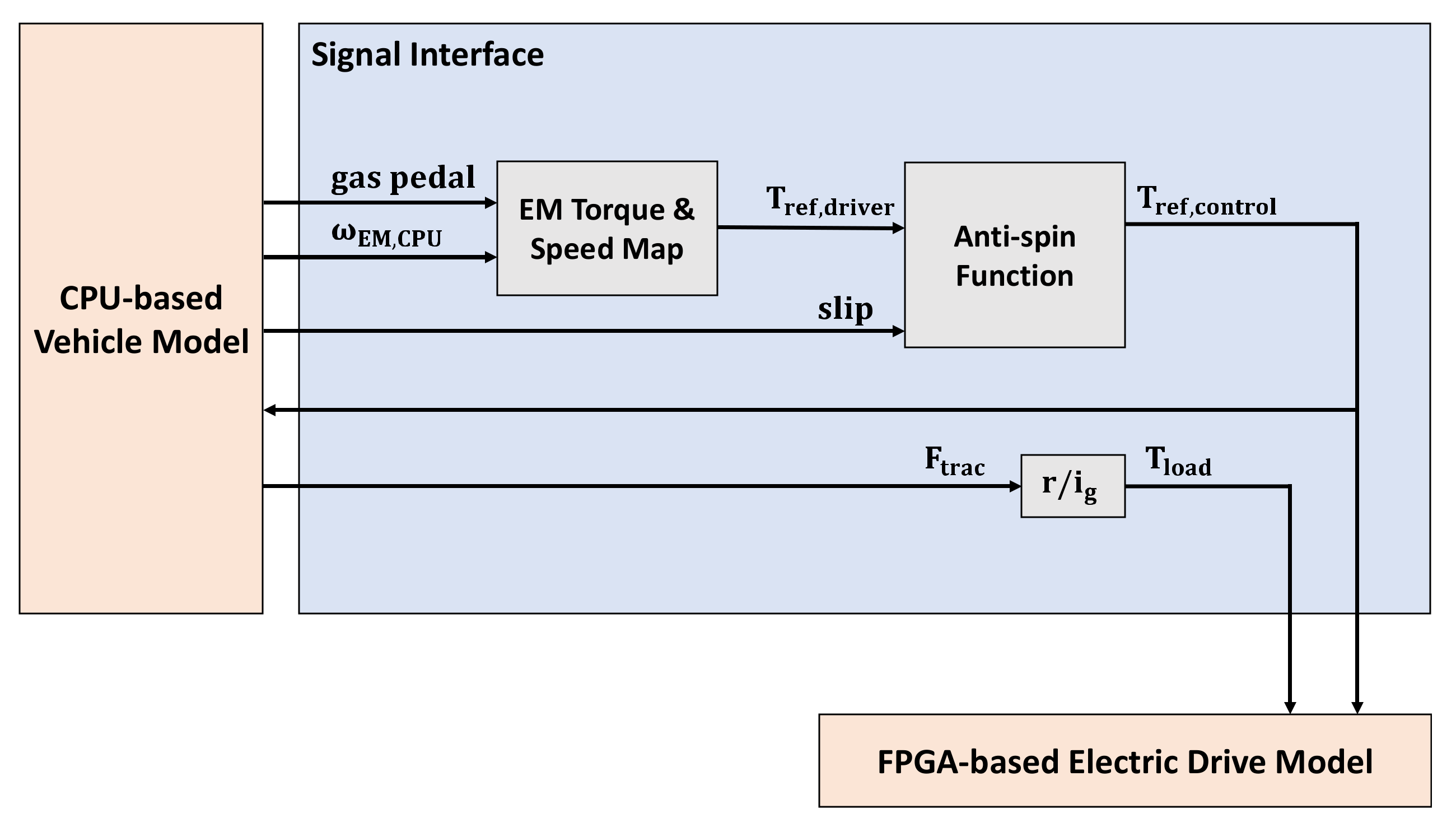
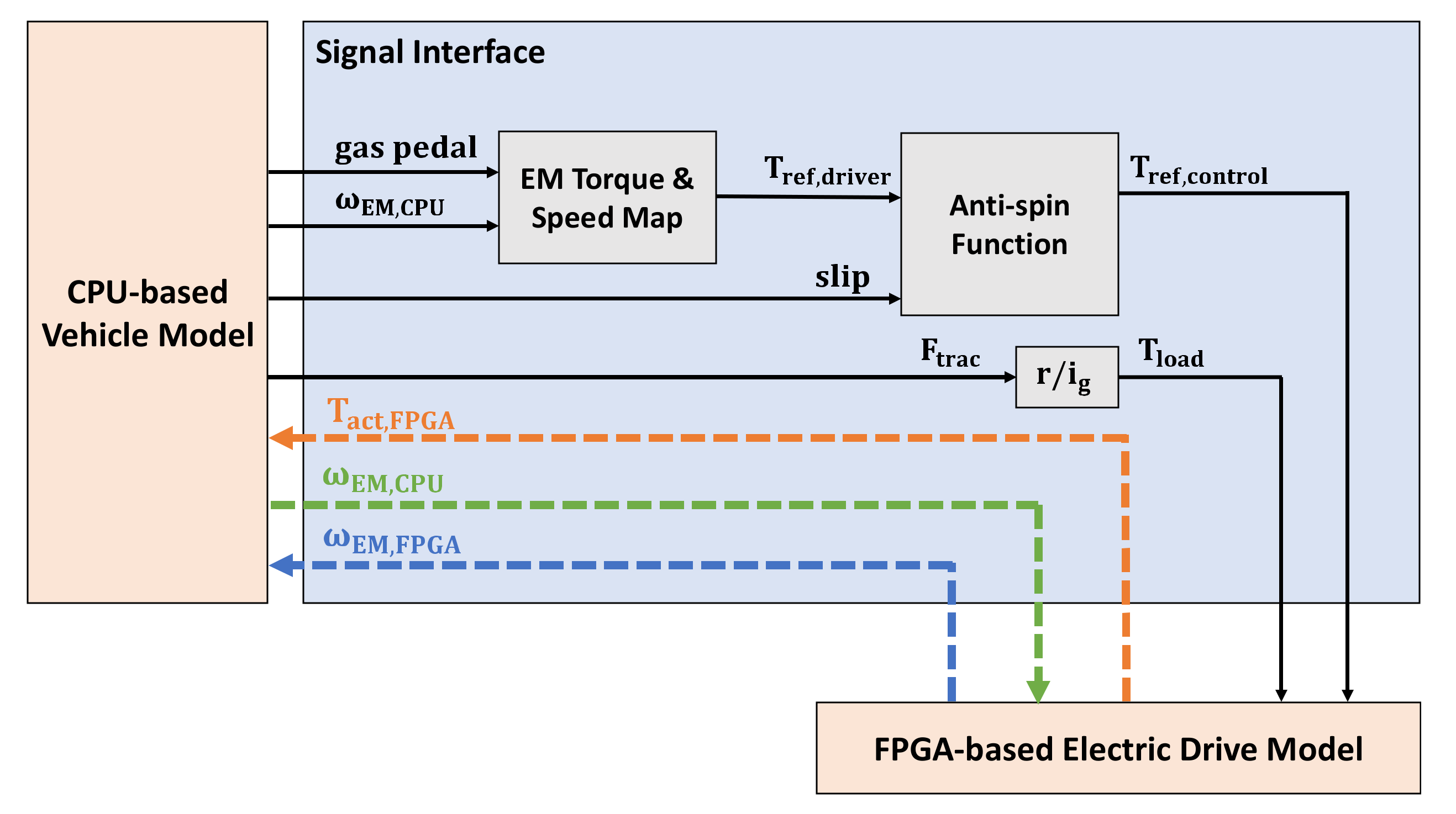
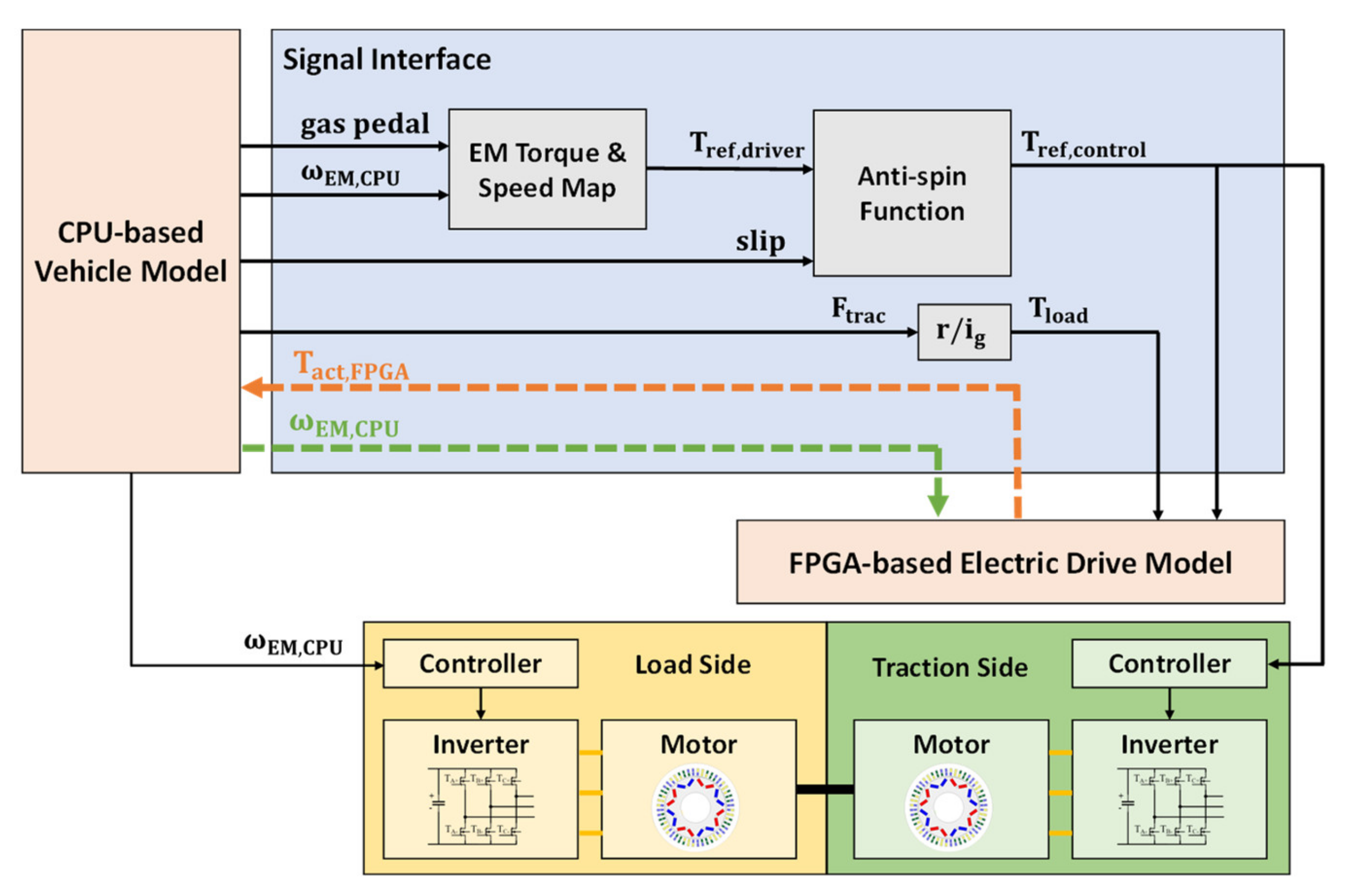
3. System Signal Interfaces
3.1. Open-Loop Interface
3.2. Closed-Loop Interface
4. Real-Time Simulation Results
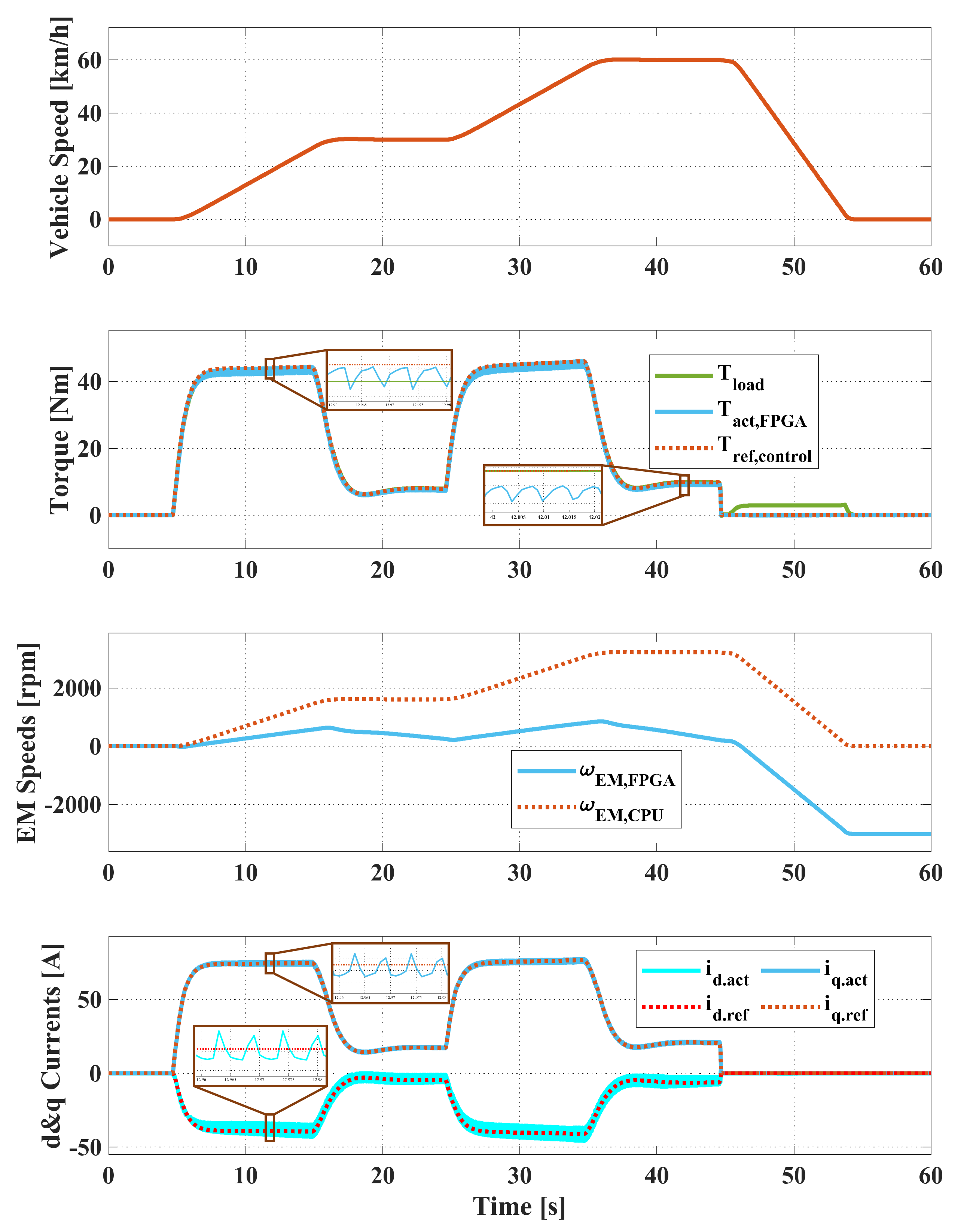
4.1. Open-Loop Real-Time Simulation Results
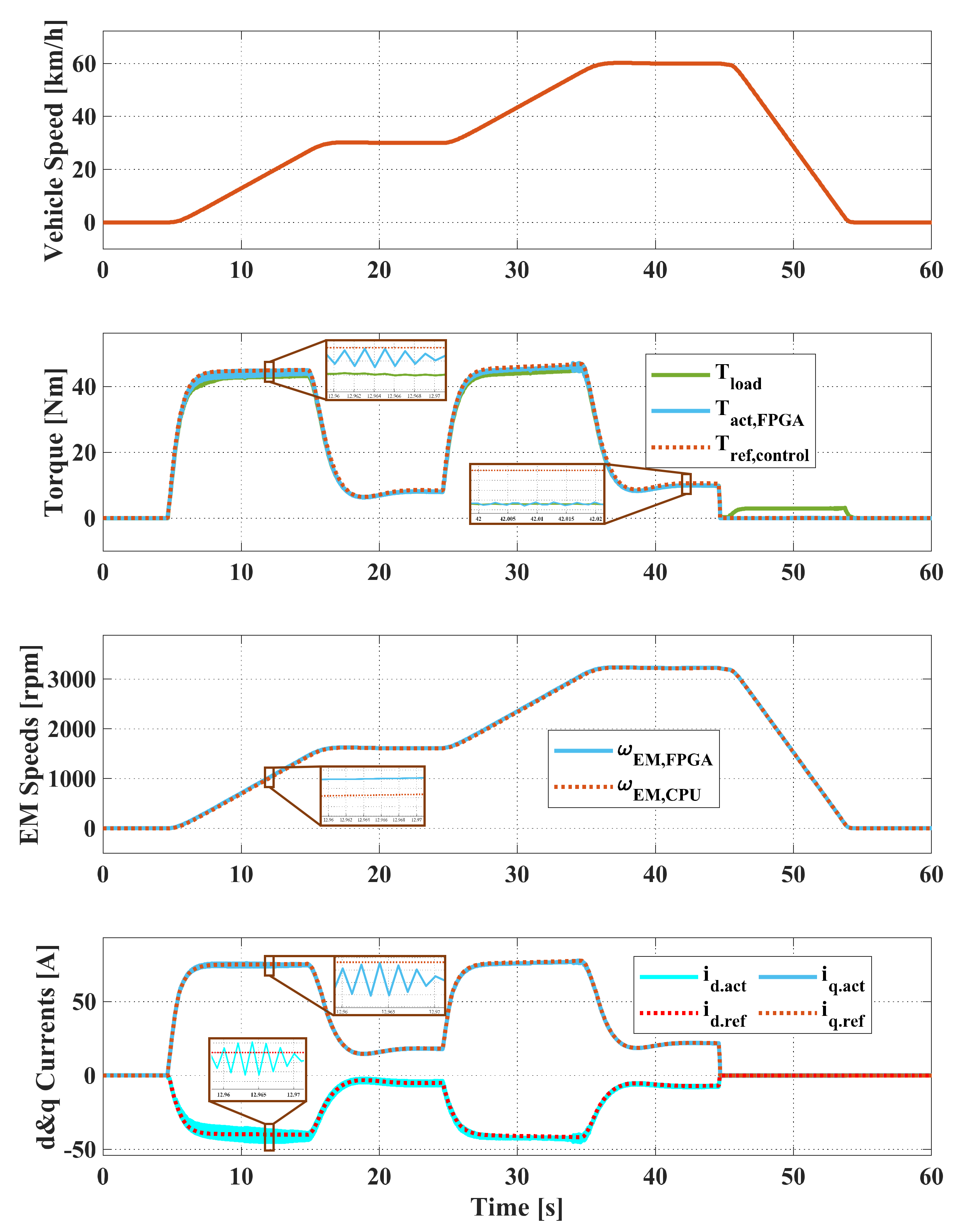
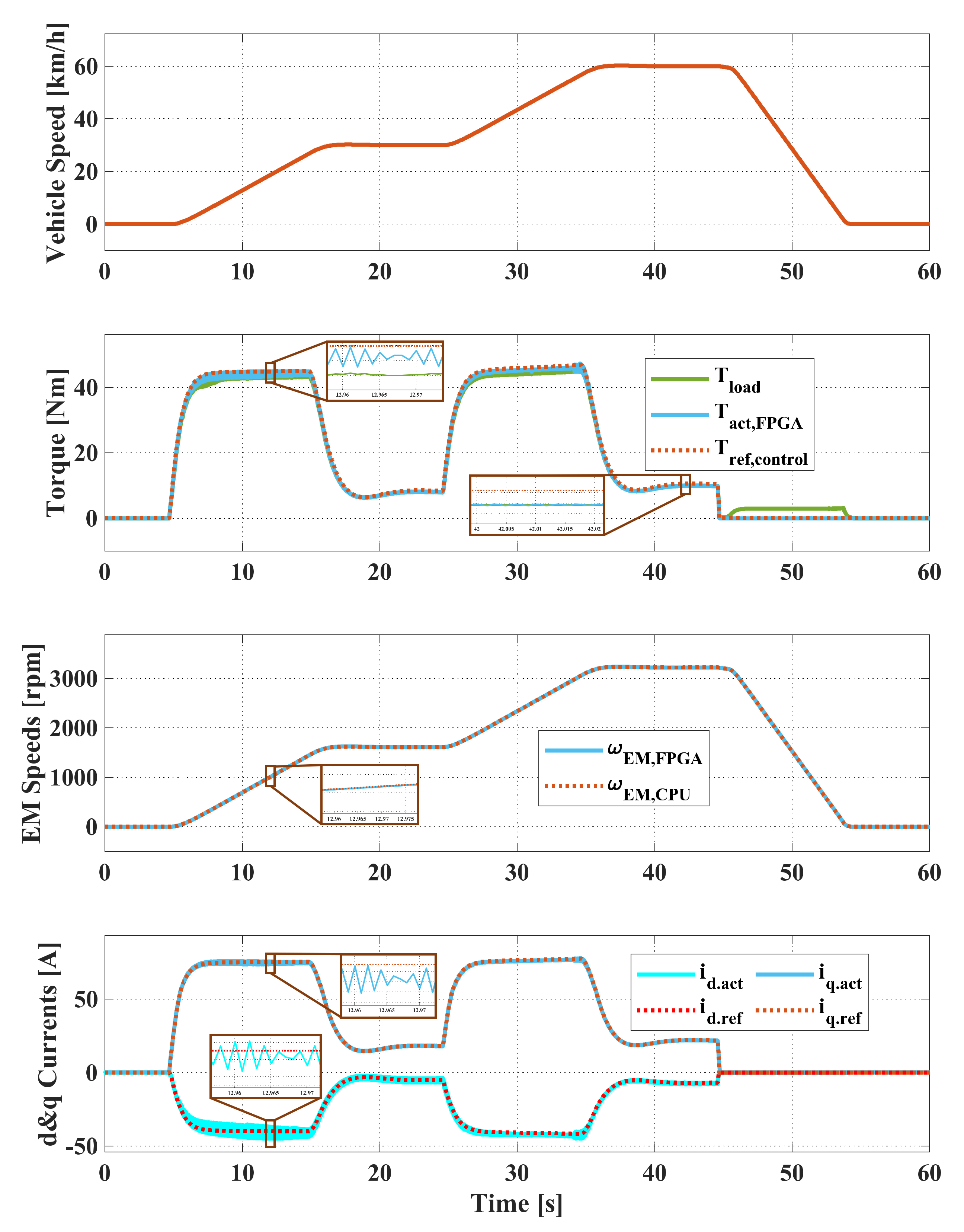
4.2. Closed-Loop Real-Time Simulation Results
4.3. Anti-Slip Real-Time Simulation Results
5. Experiment Verification
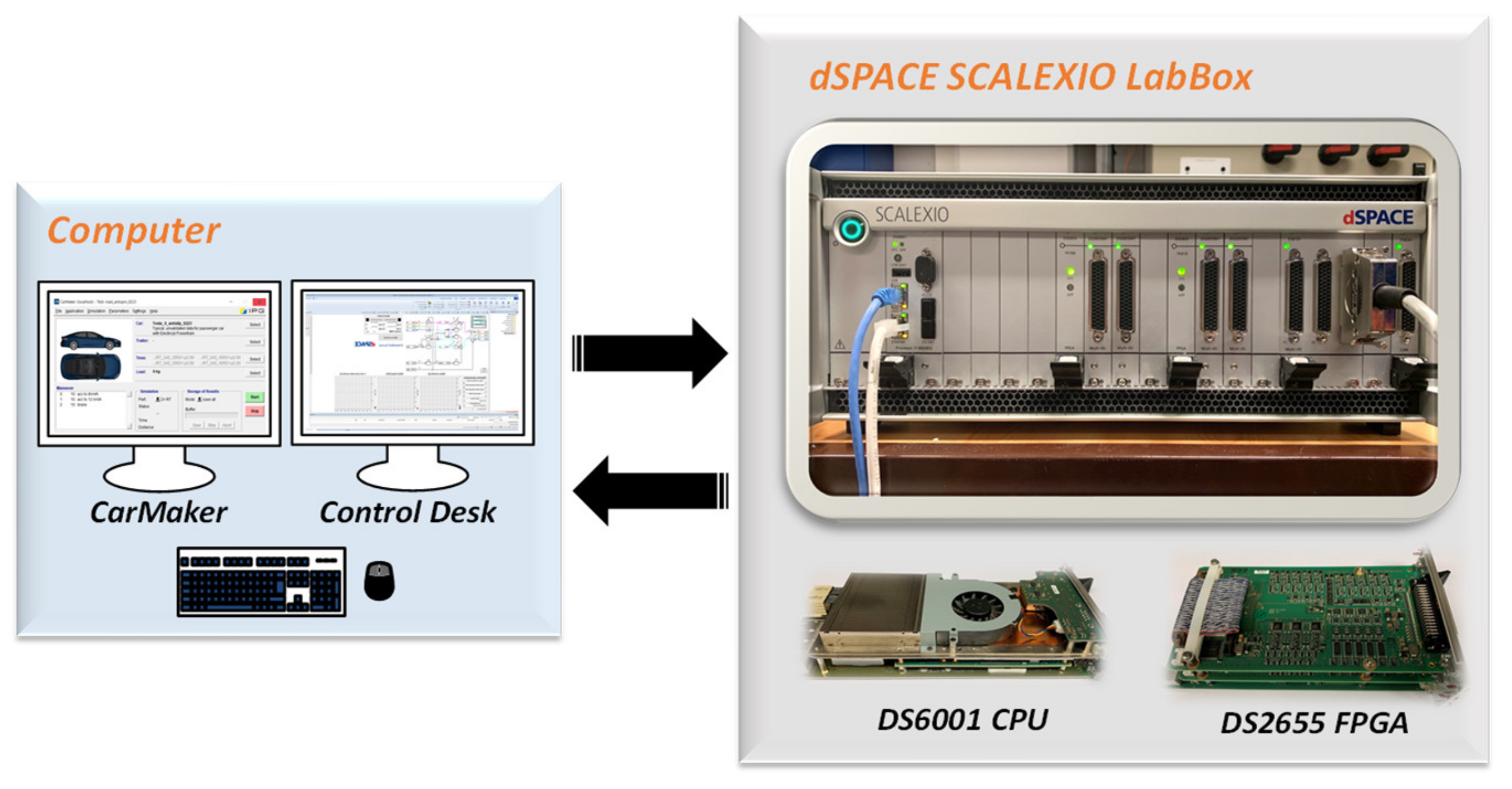
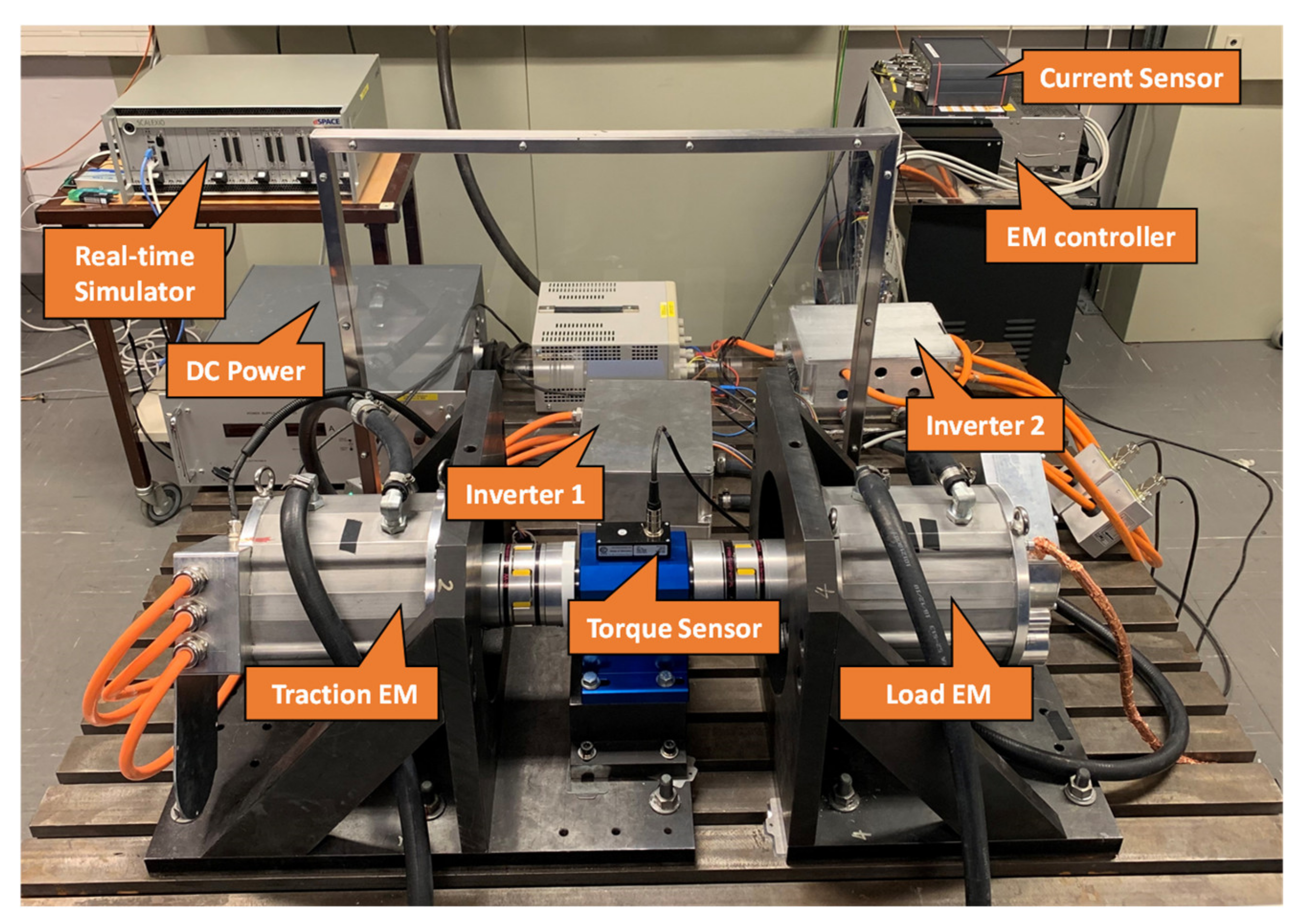
5.1. Experimental Setup
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khaligh, A.; Li, Z. Battery, Ultracapacitor, Fuel Cell, and Hybrid Energy Storage Systems for Electric, Hybrid Electric, Fuel Cell, and Plug-In Hybrid Electric Vehicles: State of the Art. IEEE Trans. Veh. Technol. 2010, 59, 2806–2814. [Google Scholar] [CrossRef]
- Sundaravadivelu, K.; Shantharam, G.; Prabaharan, P.; Raghavendra, N. Analysis of vehicle dynamics using co-simulation of AVL-CRUISE and Car, Maker in ETAS RT environment. In Proceedings of the 2014 International Conference on Advances in Electrical Engineering (ICAEE), Vellore, India, 9–11 January 2014; pp. 1–4. [Google Scholar]
- Lee, J.S.; Choi, G. Modeling and hardware-in-the-loop system realization of electric machine drives—A review. CES Trans. Electr. Mach. Syst. 2021, 5, 194–201. [Google Scholar] [CrossRef]
- Tavana, N.R.; Dinavahi, V. Real-Time Nonlinear Magnetic Equivalent Circuit Model of Induction Machine on FPGA for Hardware-in-the-Loop Simulation. IEEE Tran. Energy Convers. 2016, 31, 520–530. [Google Scholar] [CrossRef]
- Mudrov, M.; Ziuzev, A.; Nesterov, K.; Valtchev, S. Status and development prospects of real-time systems (RTS) in the electric drive. In Proceedings of the 2020 XI International Conference on Electrical Power Drive Systems (ICEPDS), St. Petersburg, Russia, 4–7 October 2020; pp. 1–5. [Google Scholar]
- Mojlish, S.; Erdogan, N.; Levine, D.; Davoudi, A. Review of Hardware Platforms for Real-Time Simulation of Electric Machines. IEEE Trans. Transp. Electrif. 2017, 3, 130–146. [Google Scholar] [CrossRef]
- Saad, H.; Ould-Bachir, T.; Mahseredjian, J.; Dufour, C.; Dennetiere, S.; Nguefeu, S. Real-Time Simulation of MMCs Using CPU and FPGA. IEEE Trans. Power Electron. 2013, 30, 259–267. [Google Scholar] [CrossRef]
- Navabi, Z. Embedded Core Design with FPGAs; McGraw-Hill: New York, NY, USA, 2007. [Google Scholar]
- Tola, S.; Sengupta, M. Real-time simulation of an induction motor in different reference frames on a FPGA platform. In Proceedings of the 2012 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Bengaluru, India, 16–19 December 2012; pp. 1–6. [Google Scholar]
- Chen, H.; Sun, S.; Aliprantis, D.C.; Zambreno, J. Dynamic simulation of electric machines on FPGA boards. In Proceedings of the 2009 IEEE International Electric Machines and Drives Conference, Miami, FL, USA, 3–6 May 2009; pp. 1523–1528. [Google Scholar]
- Williamson, S.S.; Emadi, A.; Rajashekara, K. Comprehensive Efficiency Modeling of Electric Traction Motor Drives for Hybrid Electric Vehicle Propulsion Applications. IEEE Trans. Veh. Technol. 2007, 56, 1561–1572. [Google Scholar] [CrossRef]
- Awadallah, M.; Tawadros, P.; Walker, P.; Zhang, N. Hardware-in-the-Loop Simulation for the Design and Testing of Motor in Advanced Powertrain Applications. In Proceedings of the 2018 IEEE 27th International Symposium on Industrial Electronics (ISIE), Cairns, QLD, Australia, 13–15 June 2018; pp. 817–824. [Google Scholar]
- Queiroz, J.; Carvalho, S.; Barros, C.; Barros, L.; Barbosa, D. Embedding an Electrical System Real-Time Simulator with Floating-Point Arithmetic in a Field Programmable Gate Array. Energies 2021, 14, 8404. [Google Scholar] [CrossRef]
- Stunda, M.; El Baghdadi, M.; Ribickis, L.; Hegazy, O. Induction Machine HiL Setup Implementation and IFOC Testing Based on the OP4510 Realtime Computer. In Proceedings of the 2020 IEEE 61th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 5–7 November 2020; pp. 1–5. [Google Scholar]
- Moldovan, T.; Inte, R.; Nemes, R.-O.; Ruba, M.; Martis, C. Typhoon HIL Real-Time Validation of Permanent Magnet Synchronous Motor’s Control. In Proceedings of the 2021 9th International Conference on Modern Power Systems (MPS), Cluj-Napoca, Romania, 16–17 June 2021; pp. 1–6. [Google Scholar]
- Etzold, K.; Fahrbach, T.; Klein, S.; Scheer, R.; Guse, D.; Klawitter, M.; Pischinger, S.; Andert, J. Function Development With an Electric-Machine-in-the-Loop Setup: A Case Study. IEEE Trans. Transp. Electrif. 2019, 5, 1419–1429. [Google Scholar] [CrossRef]
- Abdelrahman, A.S.; Algarny, K.S.; Youssef, M.Z. A Novel Platform for Powertrain Modeling of Electric Cars With Experimental Validation Using Real-Time Hardware in the Loop (HIL): A Case Study of GM Second Generation Chevrolet Volt. IEEE Trans. Power Electron. 2018, 33, 9762–9771. [Google Scholar] [CrossRef]
- Kali, Y.; Saad, M.; Bouchama, A.; Dehbozorgi, R.; Paquin, J.-N.; Gregoire, L.-A.; Belanger, J.; Rodas, J. HIL Simulation of On-line Parameters Estimation and Current Control of a Six-Phase Induction Machine using OPAL-RT Technologies. In Proceedings of the 2020 IEEE Power & Energy Society General Meeting (PESGM), Montreal, QC, Canada, 2–6 August 2020; pp. 1–5. [Google Scholar]
- Yang, B.; Guo, L.; Ye, J. Real-time Simulation of Electric Vehicle Powertrain: Hardware-in-the-Loop (HIL) Testbed for Cyber-Physical Security. In Proceedings of the 2020 IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, 23–26 June 2020; pp. 63–68. [Google Scholar]
- Ruan, J.; Song, Q. A Novel Dual-Motor Two-Speed Direct Drive Battery Electric Vehicle Drivetrain. IEEE Access 2019, 7, 54330–54342. [Google Scholar] [CrossRef]
- Lee, C.; Hedrick, K.; Yi, K. Real-Time Slip-Based Estimation of Maximum Tire–Road Friction Coefficient. IEEE/ASME Trans. Mechatron. 2004, 9, 454–458. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Car overall weight | 1745 | kg |
| Wheel radius | 0.343 | m |
| Wheel rotation inertial | 2.673 | |
| Gear ratio | 7 | - |
| EM peak power (30 s) | 60 | kW |
| EM peak torque (30 s) | 190 | Nm |
| EM maximum rotor speed | 9000 | rpm |
| EM rotation inertial | 0.018 | |
| EM pole pair number | 4 | - |
| EM stator resistance | 26.4 | |
| Inverter switching frequency | 5 | kHz |
| DC-link voltage | 360 | V |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, B.; Sharma, N.; Liu, Y.; Li, C.; Huang, X. Real-Time FPGA/CPU-Based Simulation of a Full-Electric Vehicle Integrated with a High-Fidelity Electric Drive Model. Energies 2022, 15, 1824. https://doi.org/10.3390/en15051824
Jiang B, Sharma N, Liu Y, Li C, Huang X. Real-Time FPGA/CPU-Based Simulation of a Full-Electric Vehicle Integrated with a High-Fidelity Electric Drive Model. Energies. 2022; 15(5):1824. https://doi.org/10.3390/en15051824
Chicago/Turabian StyleJiang, Bowen, Nimananda Sharma, Yujing Liu, Chuan Li, and Xiaoliang Huang. 2022. "Real-Time FPGA/CPU-Based Simulation of a Full-Electric Vehicle Integrated with a High-Fidelity Electric Drive Model" Energies 15, no. 5: 1824. https://doi.org/10.3390/en15051824
APA StyleJiang, B., Sharma, N., Liu, Y., Li, C., & Huang, X. (2022). Real-Time FPGA/CPU-Based Simulation of a Full-Electric Vehicle Integrated with a High-Fidelity Electric Drive Model. Energies, 15(5), 1824. https://doi.org/10.3390/en15051824