
High Frequency Resonance Suppression Strategy of Three-Phase Four-Wire Split Capacitor Inverter Connected to Parallel Compensation Grid


Abstract
:1. Introduction
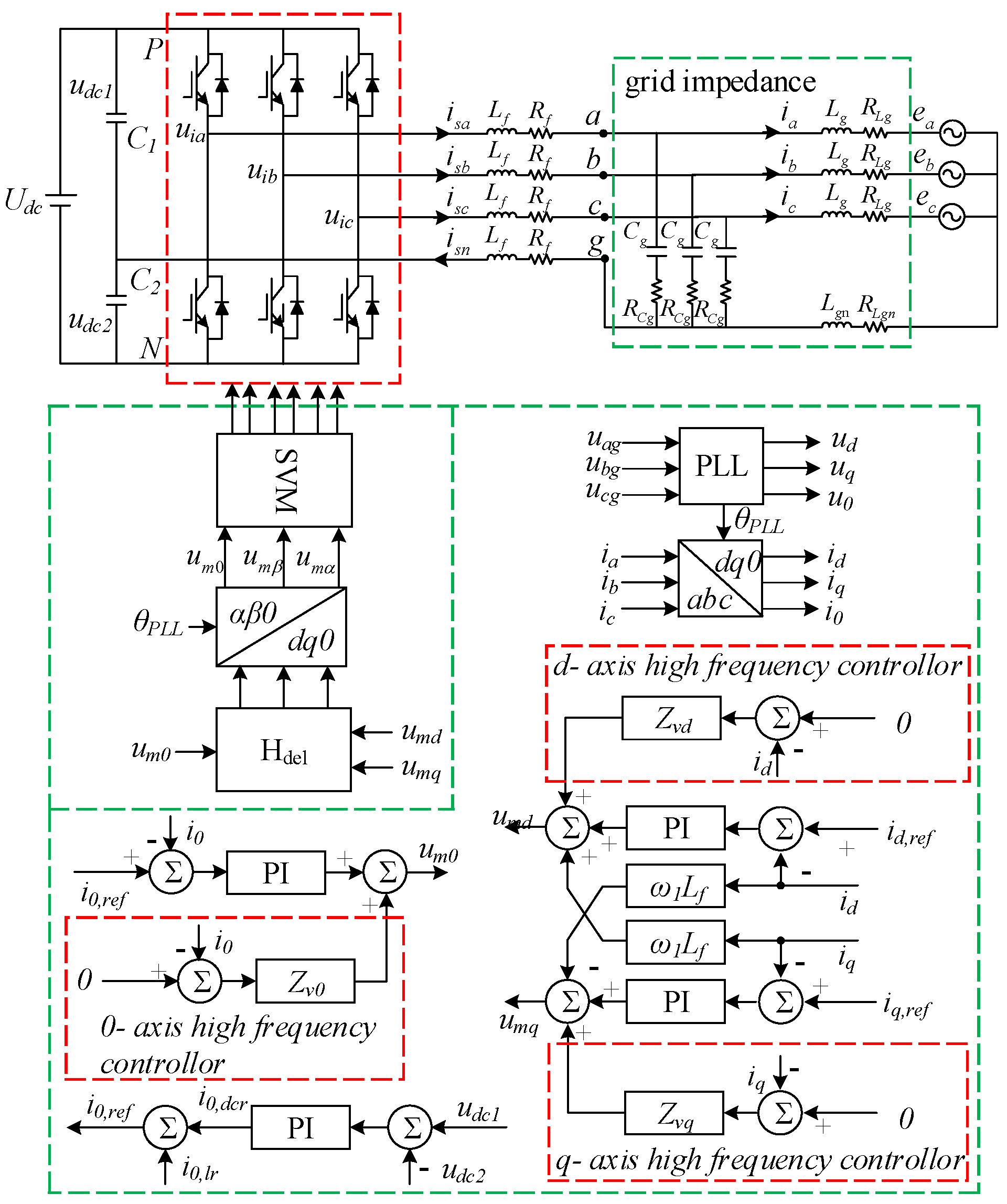
2. System Description and Simplified Impedance Modelling of TFSCI
2.1. System Description
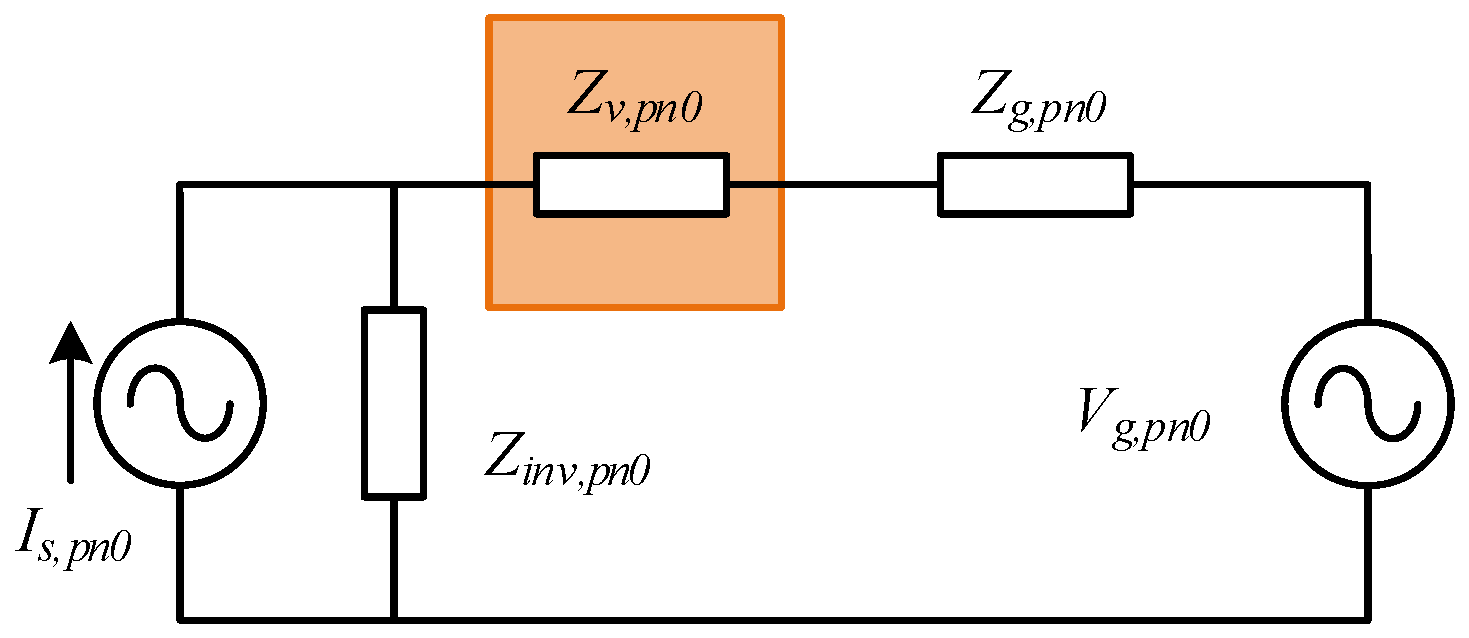
2.2. Simplified Impedance Modelling of TFSCI
- (1)
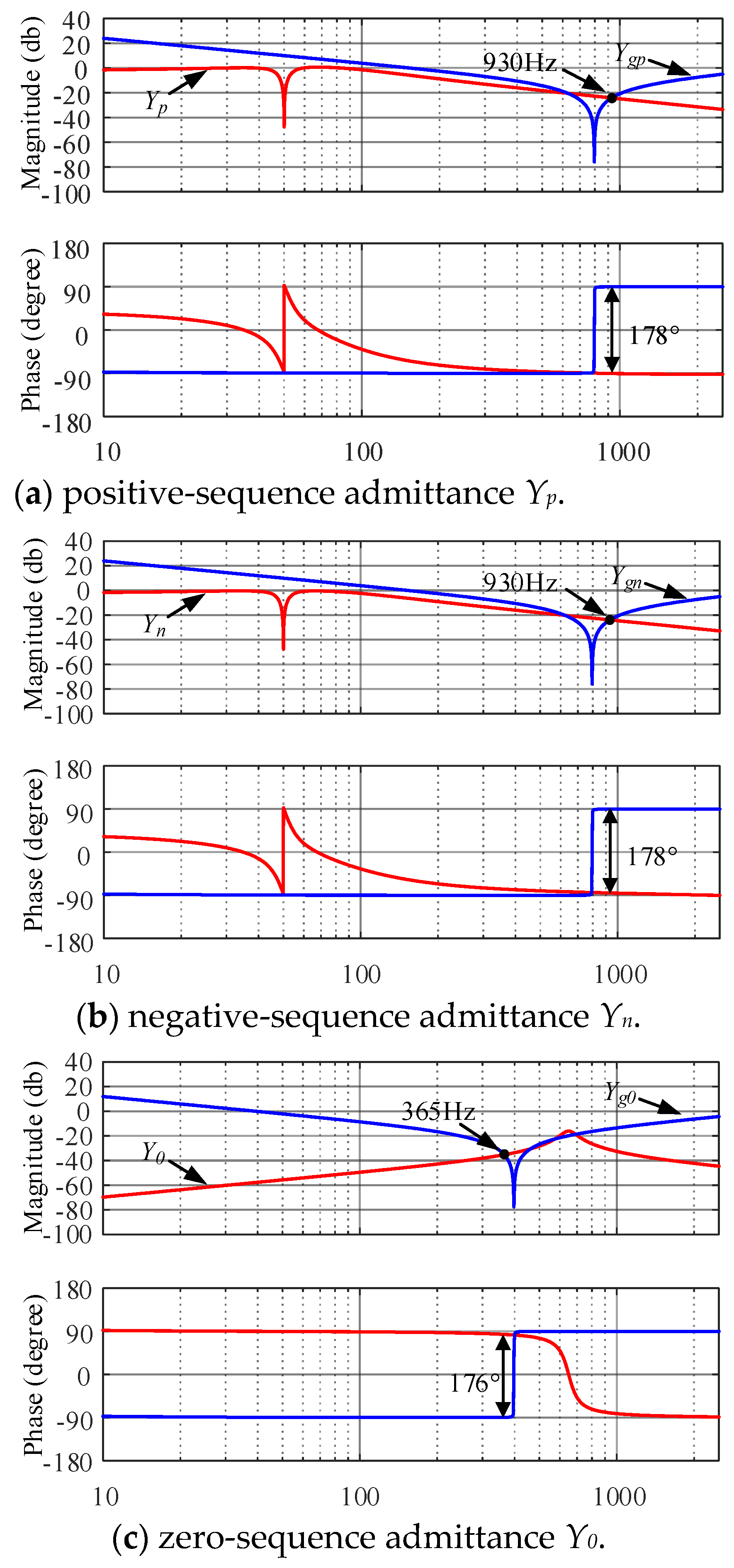
- The reason of HFR in the TFSCI system is that the phase difference between the zero-sequence impedance, positive-sequence impedance and negative-sequence impedance of TFSCI and grid are close to 180°.
- (2)
- The simplified model obtained in this section can accurately reflect the high-frequency impedance of TFSCI and can be applied to the analysis and resolution of the high-frequency resonance.
- (1)
- The reason of HFR in the TFSCI system is that the phase difference between the positive-sequence, negative-sequence, zero-sequence impedance of TFSCI system and grid is close to 180°.
- (2)
- The simplified model obtained in the previous section can accurately reflect the high-frequency impedance of TFSCI and can be used for the analysis and resolution of high-frequency problems.
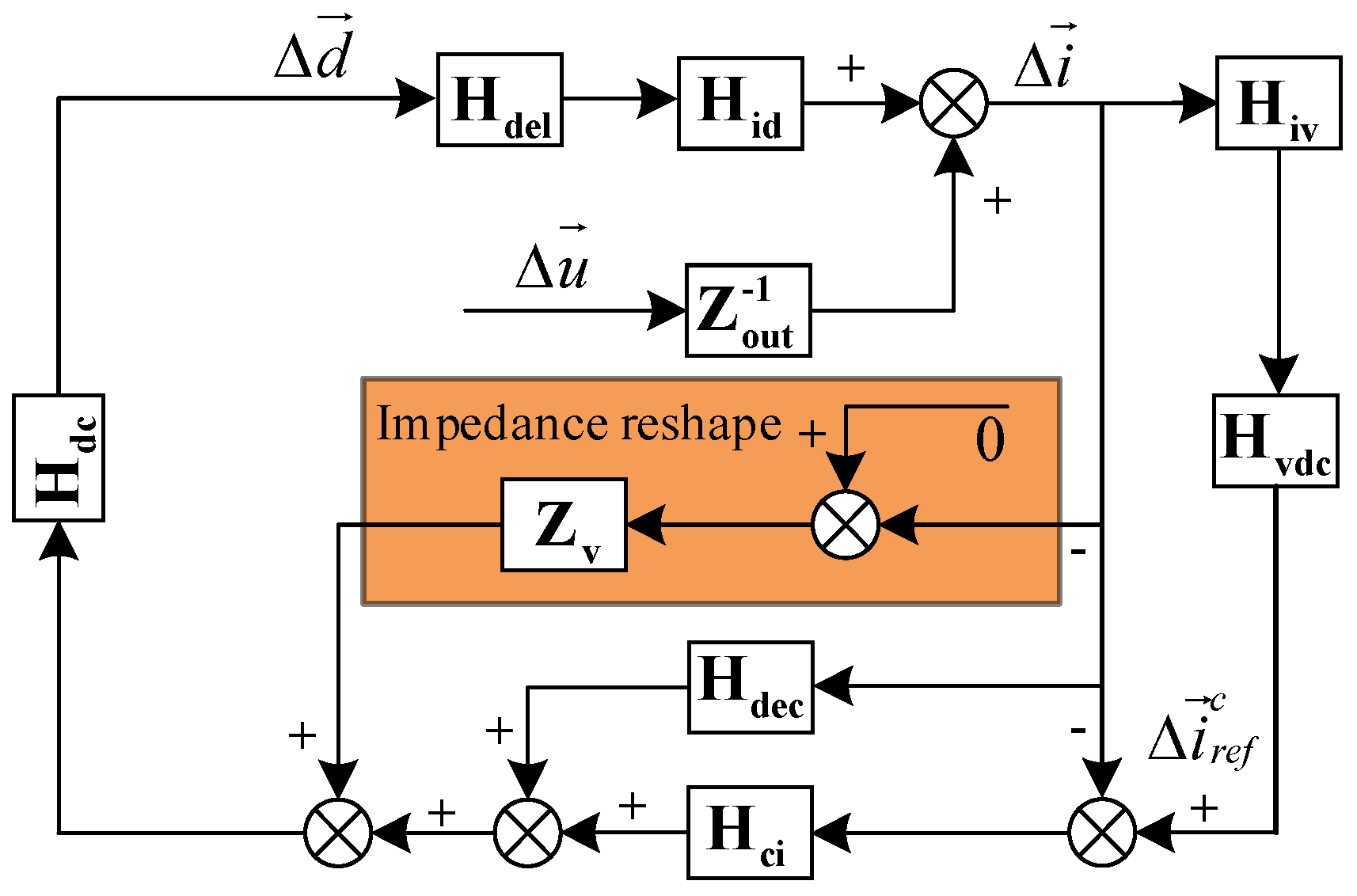
3. Control Strategy Based on Impedance Reshaping
4. Analyses of Parameters Variation
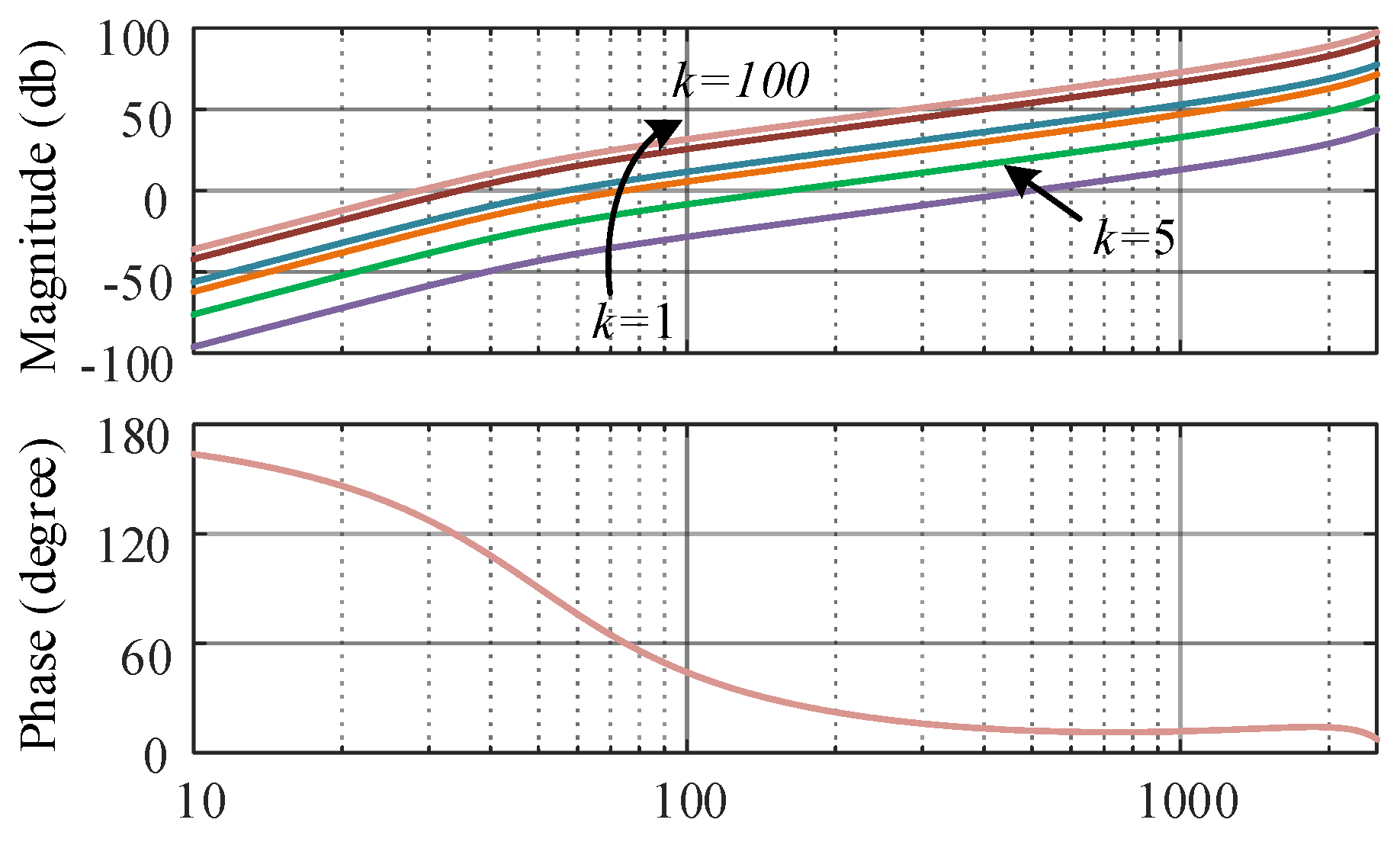
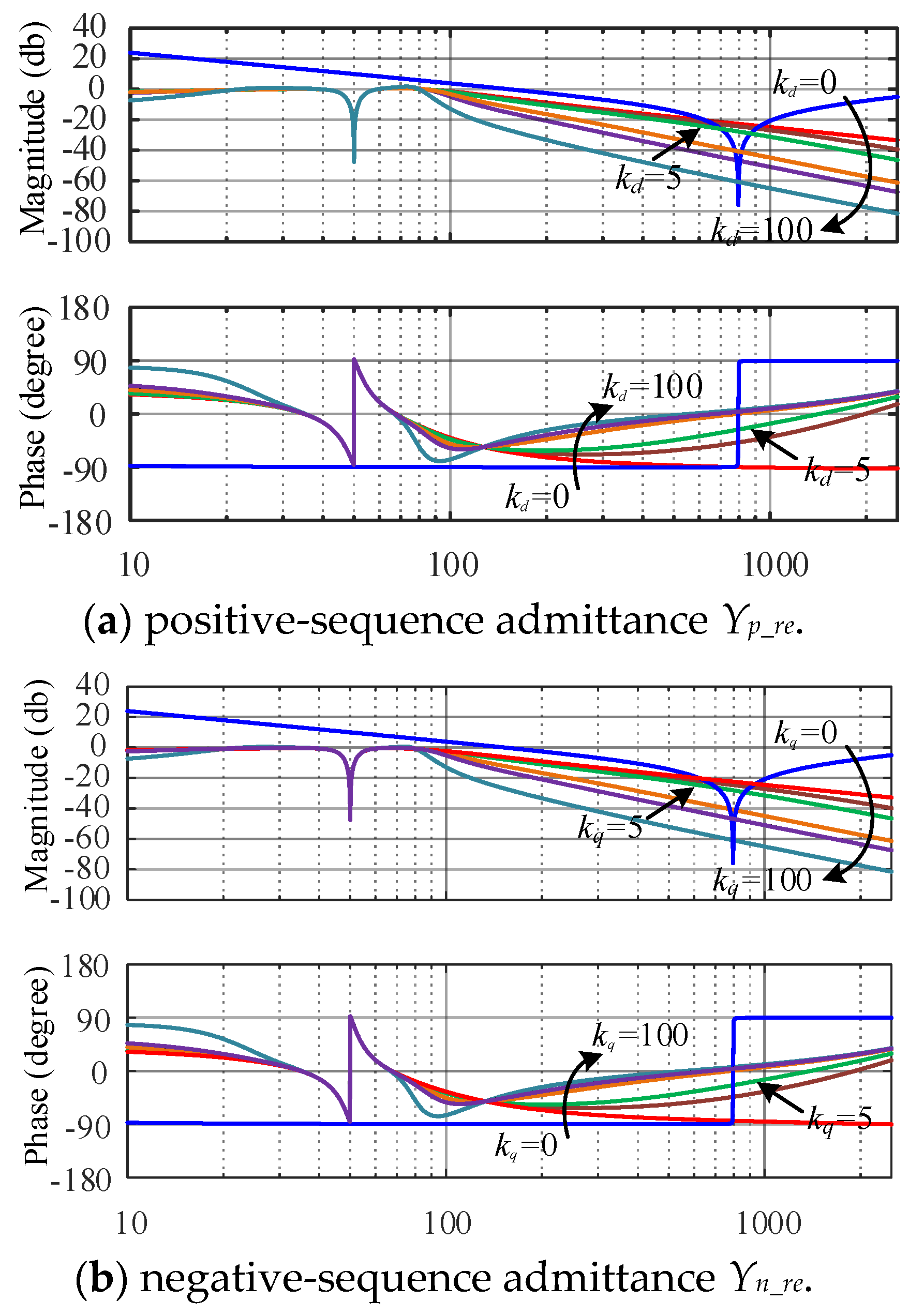
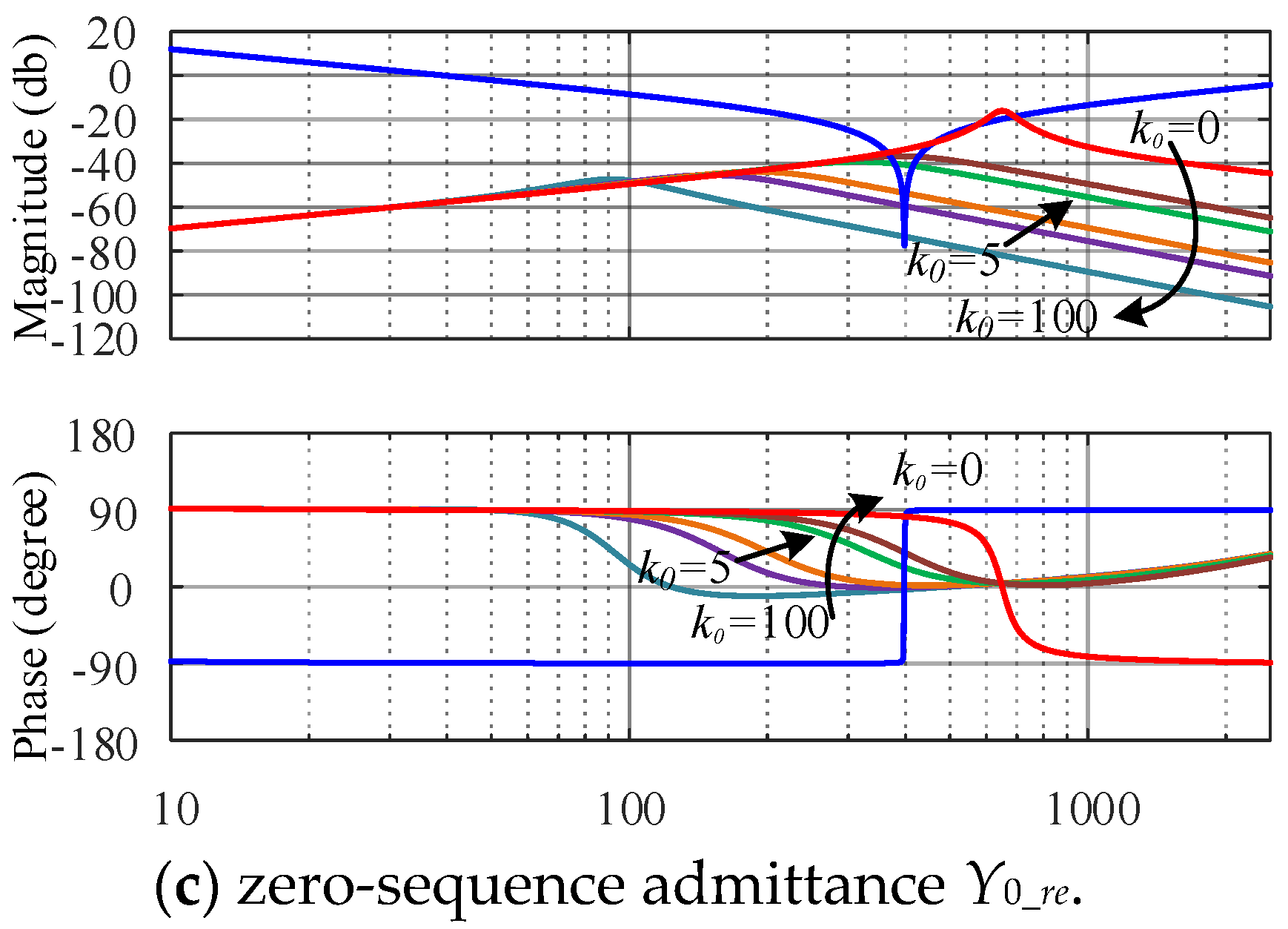
4.1. Choosing of High Frequency Controller Gain
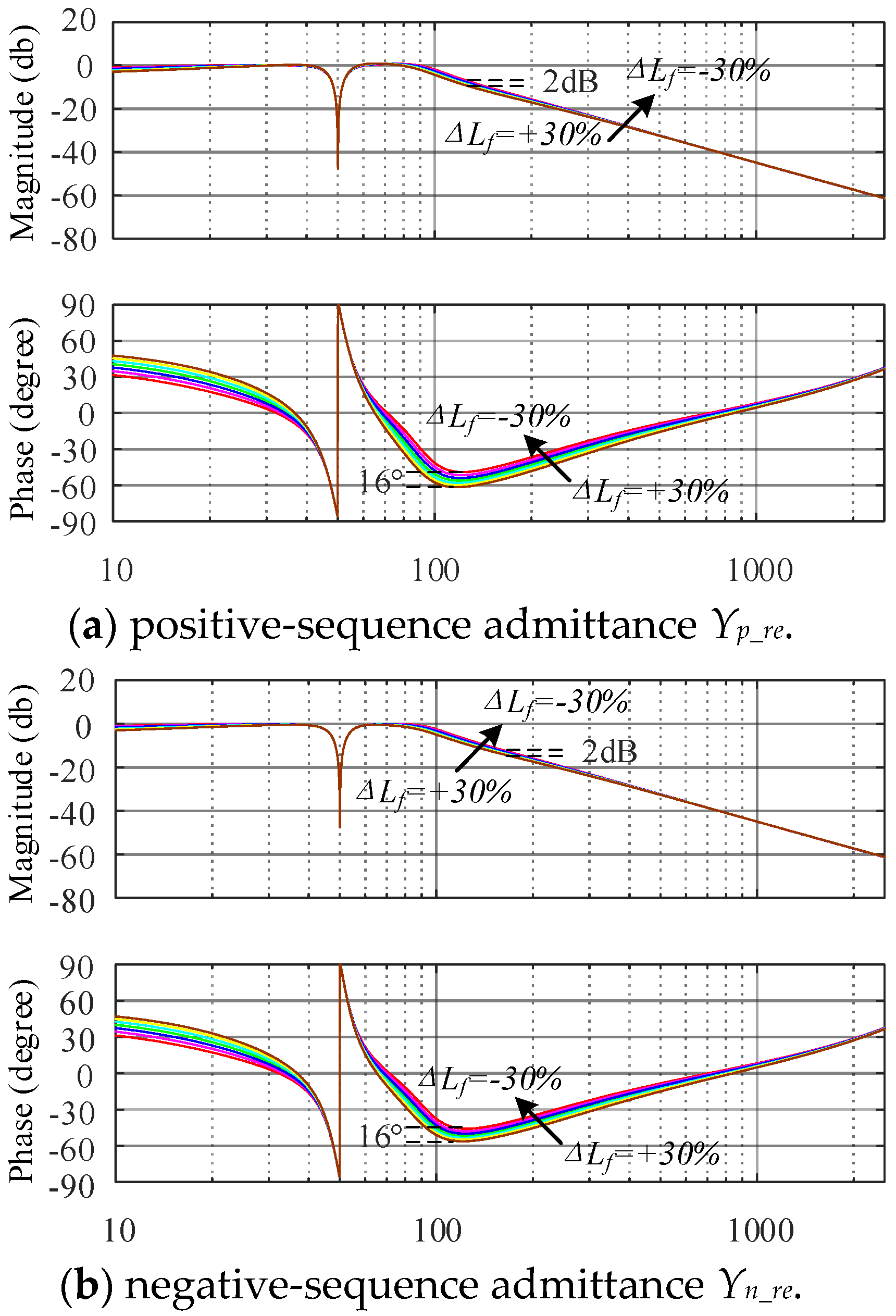
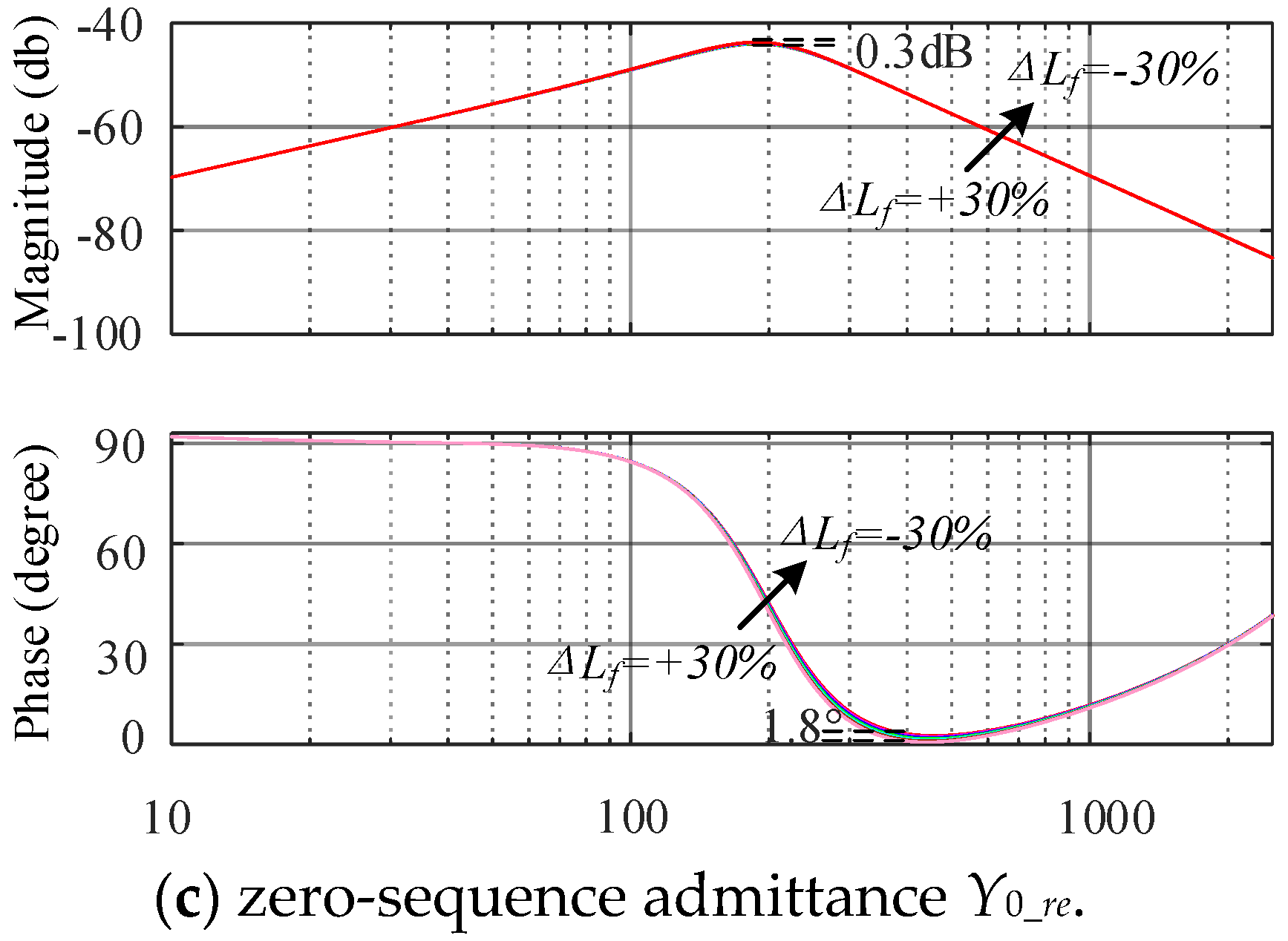
4.2. Filter Parameters Deviations
4.3. Parallel Compensation Degree Variations
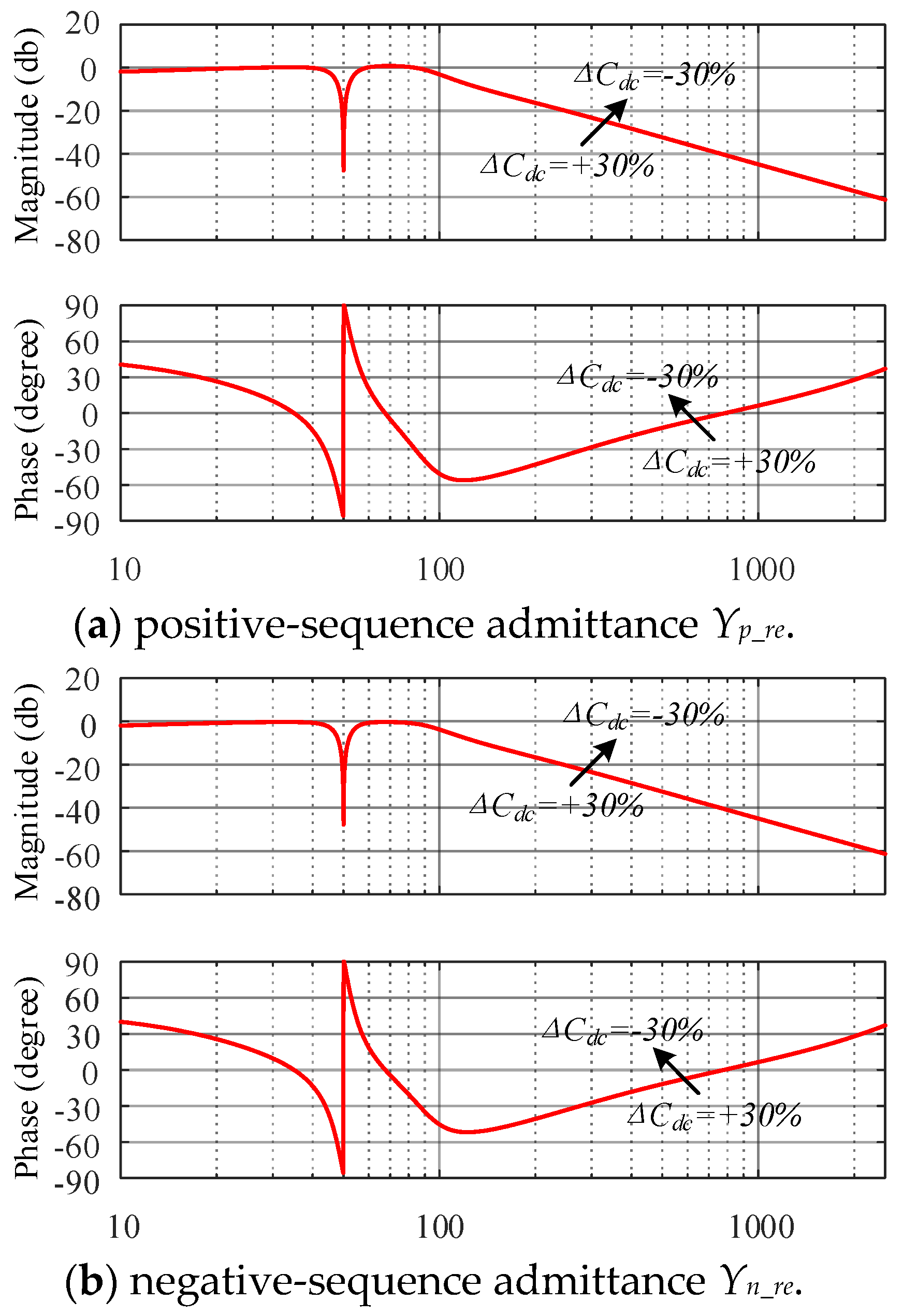
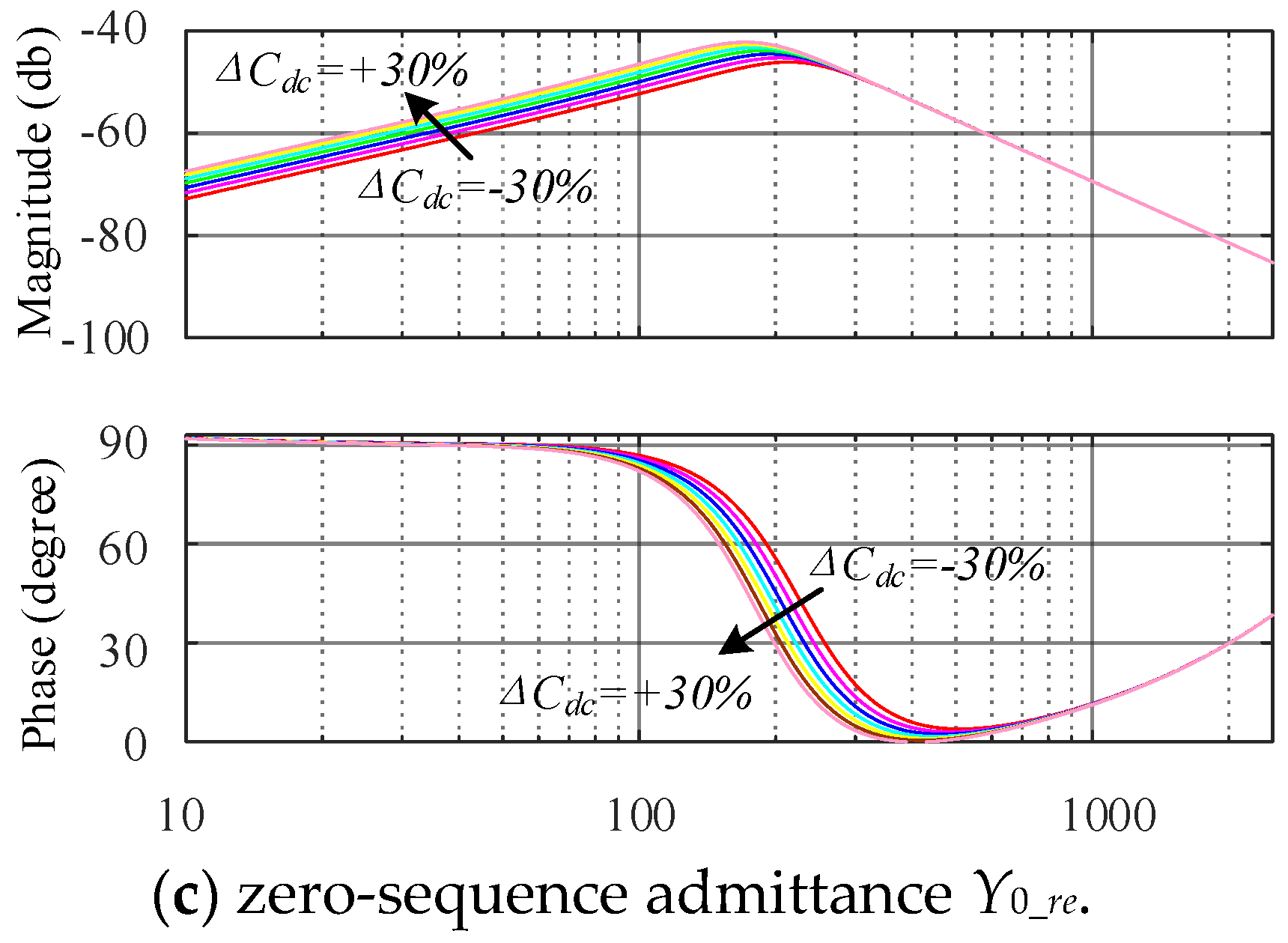
4.4. Dc Side Capacitance Variations
4.5. Discussion of Non-Linearities System
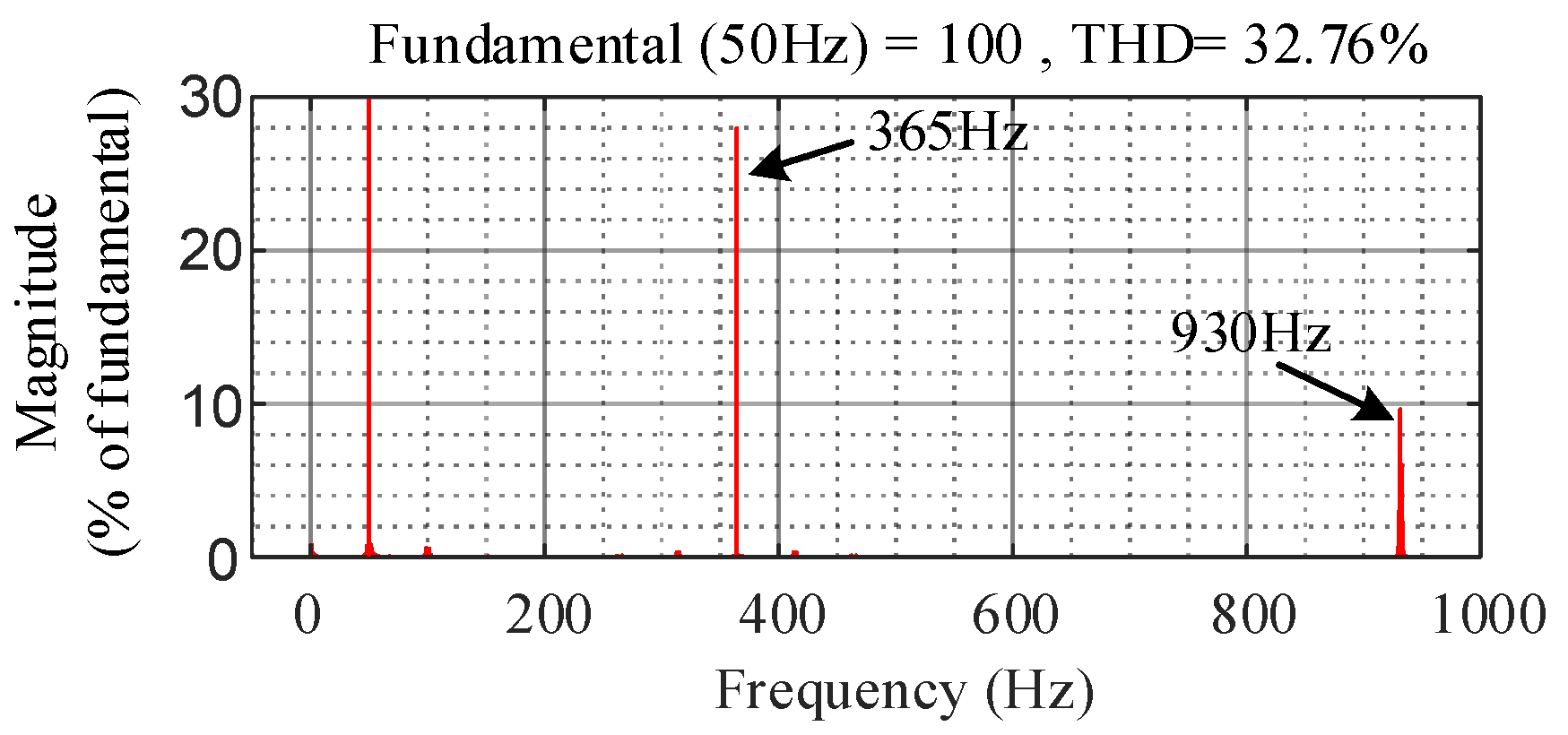
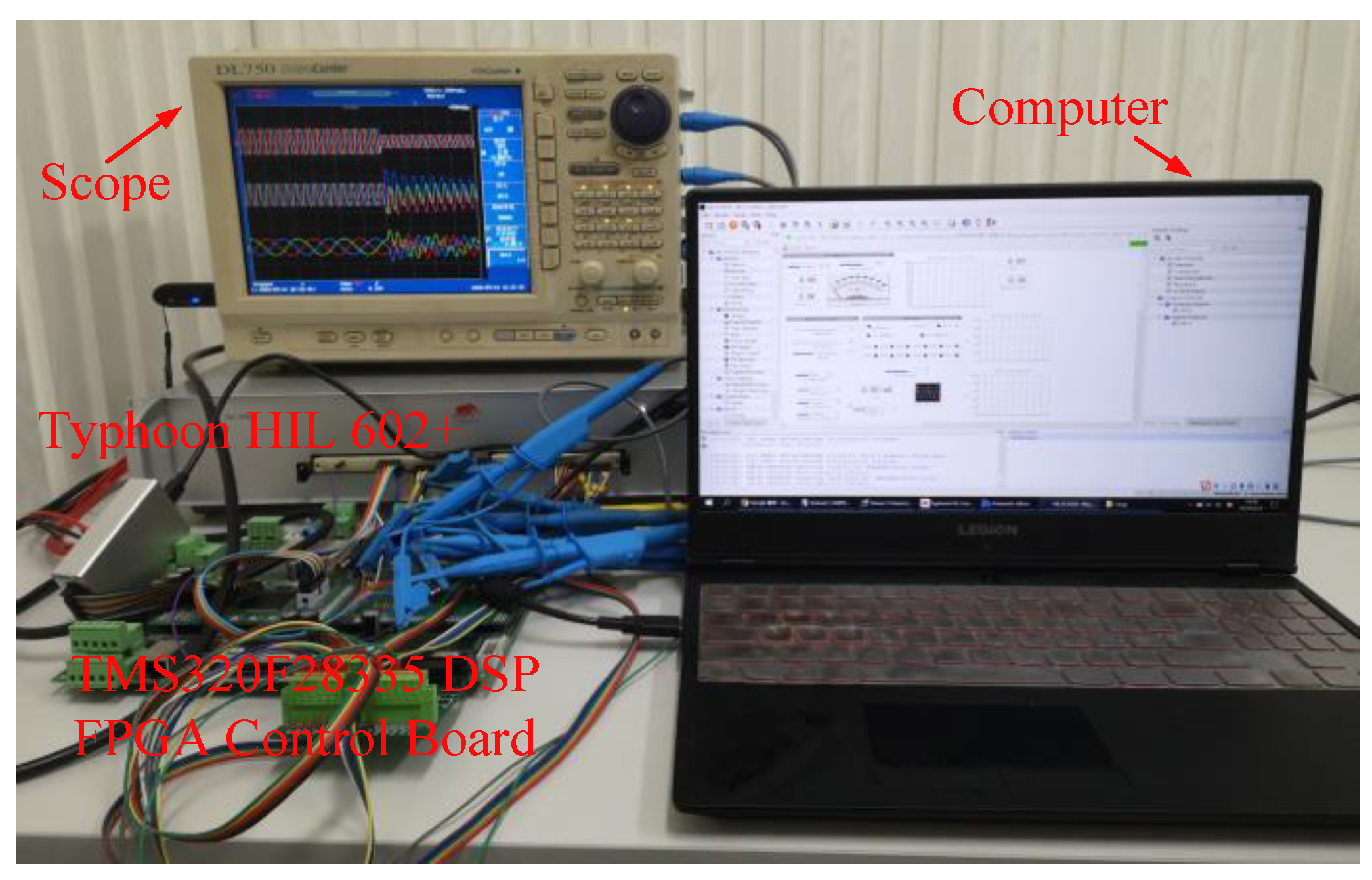
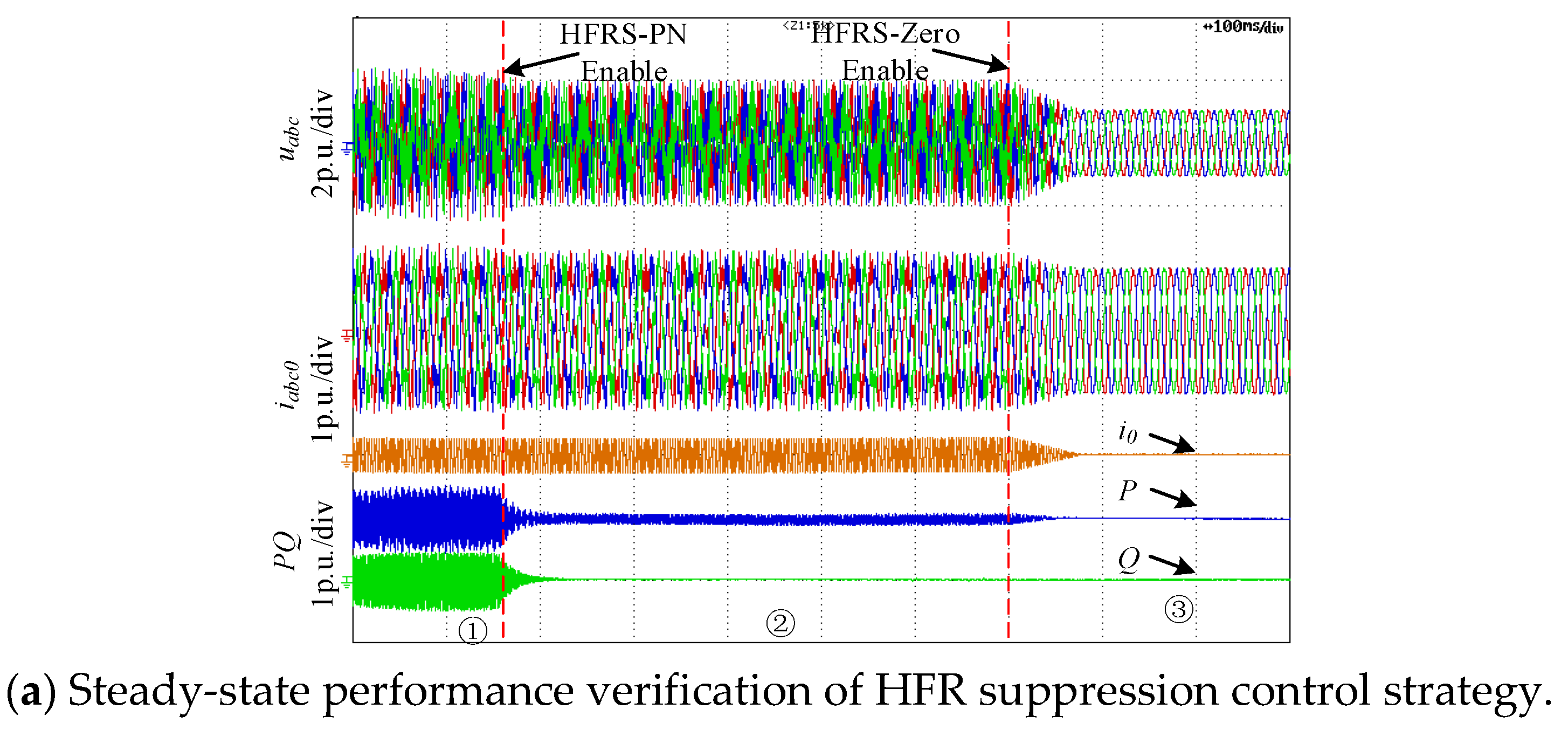
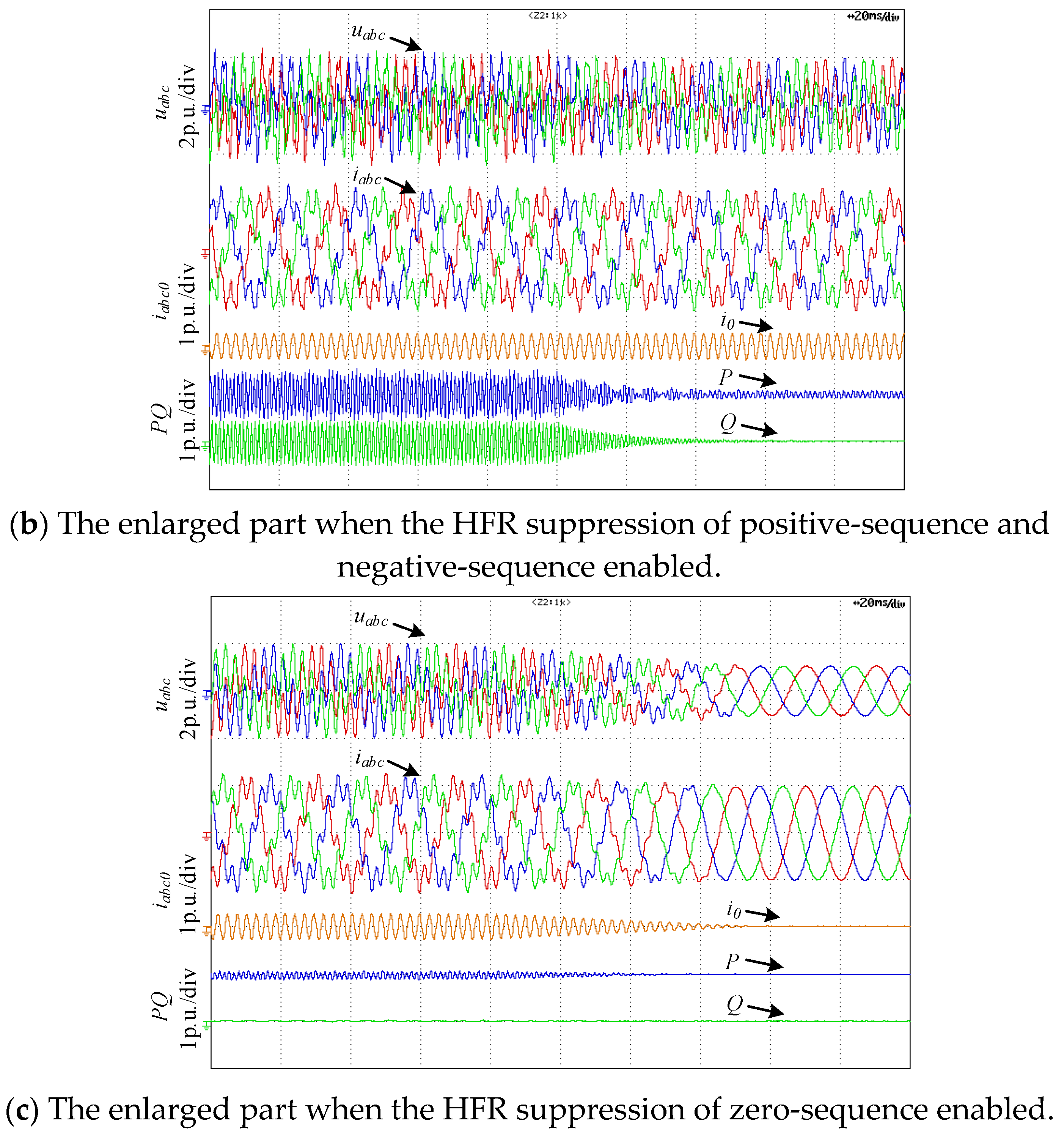
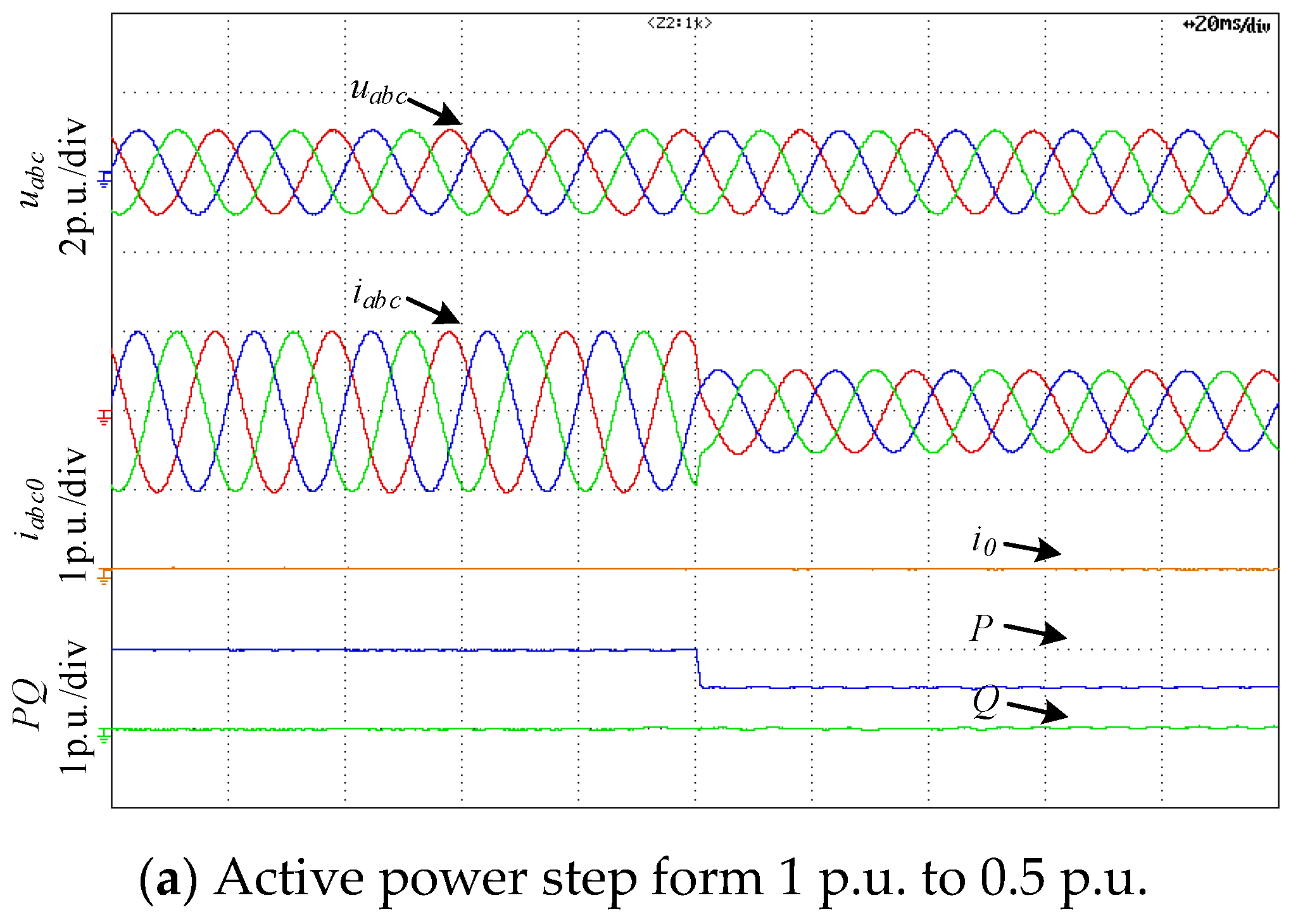
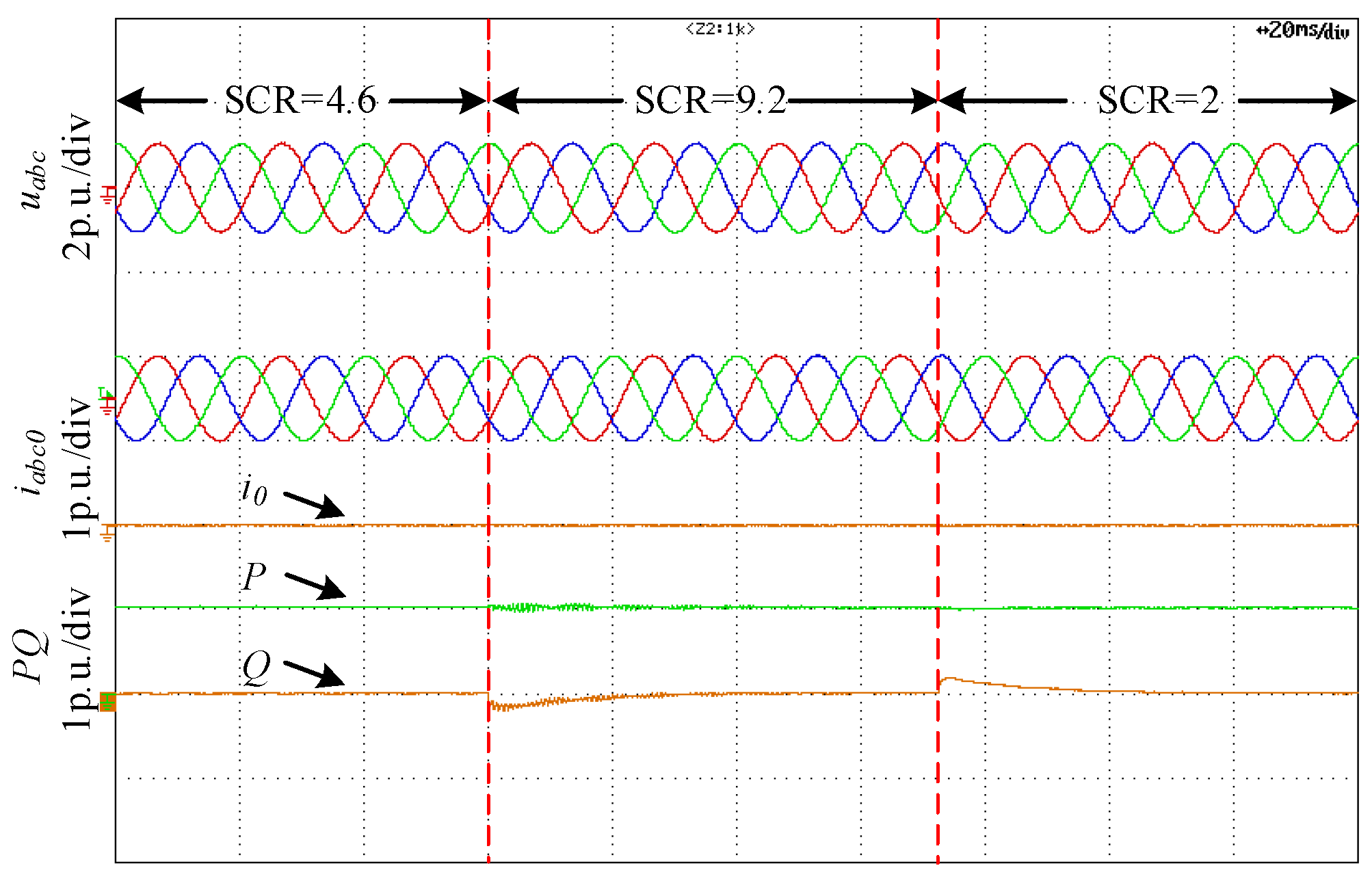
5. Experimental Verification
6. Conclusions
- (1)
- From the perspective of impedance, the essence which causes the HFR is the insufficient phase margin at the intersection of positive-sequence, negative-sequence, and zero-sequence impedance amplitude between TFSCI and grid based on a simplifying impedance of the TFSCI, when the TFSCI connects to the grid.
- (2)
- In order to suppress the HFR, an impedance reshaping method has been proposed in this paper. This method can reshape the amplitude and phase of the TFSCI impedance in high frequency band without affecting the performance of fundamental frequency control and ensure that the system has sufficient phase margin.
- (3)
- The impedance reshaping method can reshape the impedance of TFSCI within wide frequency range which makes it able to cope with the challenge of the parallel compensation degree change.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B
Appendix C

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| Us | Rated voltage | 380 V |
| Pn | Rated power | 30 kW |
| f1 | Fundamental frequency | 50 Hz |
| fs | Switching frequency | 5 kHz |
| Lf | Filter inductance | 3 mH |
| RLf | parasitic resistance of filter inductance | 0.02 Ω |
| Lg | Grid inductance | 1 mH |
| RLga | parasitic resistance of Grid inductance | 0.02 Ω |
| kpp | Proportional gain of PLL controller | 0.16 |
| kpi | Integral gain of PLL controller | 0.25 |
| kdip | Proportional gain of d-axis current controller | 1 |
| kdii | Integral gain of d-axis current controller | 18 |
| kqip | Proportional gain of q-axis current controller | 1 |
| kqii | Integral gain of q-axis current controller | 18 |
| k0ip | Proportional gain of zero-axis current controller | 3 |
| k0ii | Integral gain of zero-axis current controller | 54 |
| kdcp | proportional parameter of DC voltage balance PI controller | 2.1 |
| kdci | integral parameter of DC voltage balance PI controller | 4.2 |
References
- Primadianto, A.; Lu, C.-N. A Review on Distribution System State Estimation. IEEE Trans. Power Syst. 2016, 32, 3875–3883. [Google Scholar] [CrossRef]
- Ahmad, F.; Rasool, A.; Ozsoy, E.; Sekar, R.; Sabanovic, A.; Elitaş, M. Distribution system state estimation-A step towards smart grid. Renew. Sustain. Energy Rev. 2018, 81, 2659–2671. [Google Scholar] [CrossRef] [Green Version]
- Cavraro, G.; Arghandeh, R. Power distribution network topology detection with time-series signature verification method. IEEE Trans. Power Syst. 2018, 33, 3500–3509. [Google Scholar] [CrossRef]
- Bifaretti, S.; Lidozzi, A.; Solero, L.; Crescimbini, F. Modulation with Sinusoidal Third-Harmonic Injection for Active Split DC-Bus Four-Leg Inverters. IEEE Trans. Power Electron. 2015, 31, 6226–6236. [Google Scholar] [CrossRef]
- Hirve, S.; Chatterjee, K.; Fernandes, B.G.; Imayavaramban, M.; Dwari, S. PLL-Less Active Power Filter Based on One-Cycle Control for Compensating Unbalanced Loads in Three-Phase Four-Wire System. IEEE Trans. Power Deliv. 2007, 22, 2457–2465. [Google Scholar] [CrossRef] [Green Version]
- Morais, A.; Tofoli, F.L.; Barbi, I. Modeling, Digital Control, and Implementation of a Three-Phase Four-Wire Power Converter Used as A Power Redistribution Device. IEEE Trans. Ind. Inf. 2016, 12, 1035–1042. [Google Scholar] [CrossRef]
- Kerekes, T.; Teodorescu, R.; Liserre, M.; Klumpner, C.; Sumner, M. Evaluation of Three-Phase Transformerless Photovoltaic Inverter Topologies. IEEE Trans. Power Electron. 2009, 24, 2202–2211. [Google Scholar] [CrossRef]
- Lliuyacc, R.; Mauricioa, J.; Gomez-Exposito, A.; Savaghebi, M.; Guerrero, J. Grid-forming VSC control in four-wire systems with unbalanced nonlinear loads. Elect. Power Syst. Res. 2017, 152, 249–256. [Google Scholar] [CrossRef] [Green Version]
- Carlos, G.; Jacobina, C.B.; Santos, E. Investigation on Dynamic Voltage Restorers with Two DC Links and Series Converters for Three-Phase Four-Wire Systems. IEEE Trans. Ind. Appl. 2016, 52, 1608–1620. [Google Scholar] [CrossRef]
- Ahmed, E.M.; Aly, M.; Elmelegi, A.; Ali, Z.M. Multifunctional Distributed MPPT Controller for 3P4W Grid-Connected PV Systems in Distribution Network with Unbalanced Loads. Energies 2019, 12, 4799. [Google Scholar] [CrossRef] [Green Version]
- Zieliński, D.; Stefańczak, B.; Jędrys, K. Phase-Independent Reactive Power Compensation Based on Four-Wire Power Converter in the Presence of Angular Asymmetry between Voltage Vectors. Energies 2022, 15, 497. [Google Scholar] [CrossRef]
- Shukla, A.; Ghosh, A.; Joshi, A. Hysteresis current control operation of flying capacitor multilevel inverter and its application in shunt compensation of distribution systems. IEEE Trans. Power Deliv. 2007, 22, 396–405. [Google Scholar] [CrossRef] [Green Version]
- Ramos-Carranza, H.A.; Medina, A.; Chang, G.W. Real-Time Shunt Active Power Filter Compensation. IEEE Trans. Power Deliv. 2008, 23, 2623–2625. [Google Scholar] [CrossRef]
- Wandhareand, R.G.; Agarwal, V. Reactive power capacity enhancement of a PV-grid system to increase PV penetration level in smart grid scenario. IEEE Trans. Smart Grid 2014, 5, 1845–1854. [Google Scholar] [CrossRef]
- Ren, Y.; Wang, X.; Chen, L.; Min, Y.; Li, G.; Wang, L.; Zhang, Y. A Strictly Sufficient Stability Criterion for Grid-Connected Converters Based on Impedance Models and Gershgorin’s Theorem. IEEE Trans. Power Deliv. 2020, 35, 1606–1609. [Google Scholar] [CrossRef]
- Song, S.; Guan, P.; Liu, B.; Lu, Y.; Goh, H. Impedance Modeling and Stability Analysis of DFIG-Based Wind Energy Conversion System Considering Frequency Coupling. Energies 2021, 14, 3243. [Google Scholar] [CrossRef]
- Xu, Y.; Nian, H.; Wang, Y.; Sun, D. Impedance Modeling and Stability Analysis of VSG Controlled Grid-Connected Converters with Cascaded Inner Control Loop. Energies 2020, 13, 5114. [Google Scholar] [CrossRef]
- Cespedes, M.; Sun, J. Impedance Modeling and Analysis of Grid-Connected Voltage-Source Converters. IEEE Trans. Power Electron. 2013, 29, 1254–1261. [Google Scholar] [CrossRef]
- Sun, J. Impedance-Based Stability Criterion for Grid-Connected Inverters. IEEE Trans. Power Electron. 2011, 26, 3075–3078. [Google Scholar] [CrossRef]
- Wang, X.; Blaabjerg, F.; Chen, Z. Synthesis of variable harmonic impedance in inverter-interfaced distributed generation unit for harmonic damping throughout a distribution network. IEEE Trans. Ind. Appl. 2012, 48, 1407–1417. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Blaabjerg, F.; Chen, Z. Autonomous control of inverter interfaced distributed generation units for harmonic current filtering and resonance damping in an islanded microgrid. IEEE Trans. Ind. Appl. 2014, 50, 452–461. [Google Scholar] [CrossRef]
- Wang, X.; Pang, Y.; Loh, P.C.; Blaabjerg, F. A Series-LC-Filtered Active Damper with Grid Disturbance Rejection for AC Power-Electronics-Based Power Systems. IEEE Trans. Power Electron. 2014, 30, 4037–4041. [Google Scholar] [CrossRef]
- Wang, X.; Blaabjerg, F.; Liserre, M. An active damper to suppress multiple resonances with unknown frequencies. In Proceedings of the 2014 IEEE Applied Power Electronics Conference and Exposition—APEC 2014, Fort Worth, TX, USA, 16–20 March 2014. [Google Scholar] [CrossRef] [Green Version]
- Pang, B.; Wu, C.; Nian, H.; Blaabjerg, F. Damping Method of High-Frequency Resonance for Stator Current Controlled DFIG System Under Parallel Compensation Grid. IEEE Trans. Power Electron. 2020, 35, 10260–10270. [Google Scholar] [CrossRef]
- Wang, X.; Li, Y.; Blaabjerg, F.; Loh, P.C. Virtual-impedance-based control for voltage-source and current-source converters. IEEE Trans. Power Electron. 2015, 30, 7019–7037. [Google Scholar] [CrossRef]
- Nian, H.; Liao, Y.; Li, M.; Sun, D.; Xu, Y.; Hu, B. Impedance Modeling and Stability Analysis of Three-Phase Four-Leg Grid-Connected Inverter Considering Zero-Sequence. IEEE Access 2021, 9, 83676–83687. [Google Scholar] [CrossRef]
- Hu, B.; Nian, H.; Yang, J.; Li, M.; Xu, Y. High-Frequency Resonance Analysis and Reshaping Control Strategy of DFIG System Based on DPC. IEEE Trans. Power Electron. 2020, 36, 7810–7819. [Google Scholar] [CrossRef]
- Nian, H.; Yang, J.; Hu, B.; Jiao, Y.; Xu, Y.; Li, M. Stability Analysis and Impedance Reshaping Method for DC Resonance in VSCs-based Power System. IEEE Trans. Energy Convers. 2021, 36, 3344–3354. [Google Scholar] [CrossRef]
- Rygg, A.; Molinas, M.; Zhang, C.; Cai, X. A Modified Sequence-Domain Impedance Definition and Its Equivalence to the dq-Domain Impedance Definition for the Stability Analysis of AC Power Electronic Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1383–1396. [Google Scholar] [CrossRef] [Green Version]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, G.; Ye, Z.; Xia, Y.; Nian, H.; Huang, L.; Wang, Z. High Frequency Resonance Suppression Strategy of Three-Phase Four-Wire Split Capacitor Inverter Connected to Parallel Compensation Grid. Energies 2022, 15, 1486. https://doi.org/10.3390/en15041486
Feng G, Ye Z, Xia Y, Nian H, Huang L, Wang Z. High Frequency Resonance Suppression Strategy of Three-Phase Four-Wire Split Capacitor Inverter Connected to Parallel Compensation Grid. Energies. 2022; 15(4):1486. https://doi.org/10.3390/en15041486
Chicago/Turabian StyleFeng, Guoli, Zhihao Ye, Yihui Xia, Heng Nian, Liming Huang, and Zerun Wang. 2022. "High Frequency Resonance Suppression Strategy of Three-Phase Four-Wire Split Capacitor Inverter Connected to Parallel Compensation Grid" Energies 15, no. 4: 1486. https://doi.org/10.3390/en15041486
APA StyleFeng, G., Ye, Z., Xia, Y., Nian, H., Huang, L., & Wang, Z. (2022). High Frequency Resonance Suppression Strategy of Three-Phase Four-Wire Split Capacitor Inverter Connected to Parallel Compensation Grid. Energies, 15(4), 1486. https://doi.org/10.3390/en15041486