
Intelligent Power Distribution Restoration Based on a Multi-Objective Bacterial Foraging Optimization Algorithm

 ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
2. The Multi-Objective Bacteria Culture Optimization Algorithm
2.1. General Overview of the BFOA
2.2. Foraging
2.3. Bacterial Foraging Optimization Algorithm
2.3.1. Chemotaxis
2.3.2. Swarm
2.3.3. Reproduction
2.3.4. Elimination and Dispersion
2.4. MOOP and Bio-Inspired Algorithms
3. Proposed Methodology
3.1. Network Representation
3.2. Fault Isolation
3.3. Power Flow Computation
- The following values must be normalized: impedance (Zij) of each conductor, power bus consumed (S), the voltage of the power supply (Vbase).
- The normalized reference voltage (of the power supply) is initially assumed, and its normalized value is denoted in 1 pu. Each consumer is then assigned the stress value equal to that of the reference.
- A scan is made from the end nodes determining the values of the system currents according to the Equation (5):
- Starting from the substation to the final bars, the values of the system voltages are determined according to Equation (6):
- After updating the stress values, an absolute error test is performed between the previous stress value and Vi0 the current value for a previously Vi1 specified ϵthreshold, as described in the Equation (7):
- If the test fails for some stress value, the procedure repeats from step 3 until convergence occurs.
3.4. Objective Functions and Constraints
- Maximize the number of loads restored: After calculating the power flow, if all constraints have been respected, all powered buses are added, considering the priorities of each bus.
- Minimize the number of switch operations: A comparison is made between the switch state solution vector with the initial vector to identify the number of changed switches.
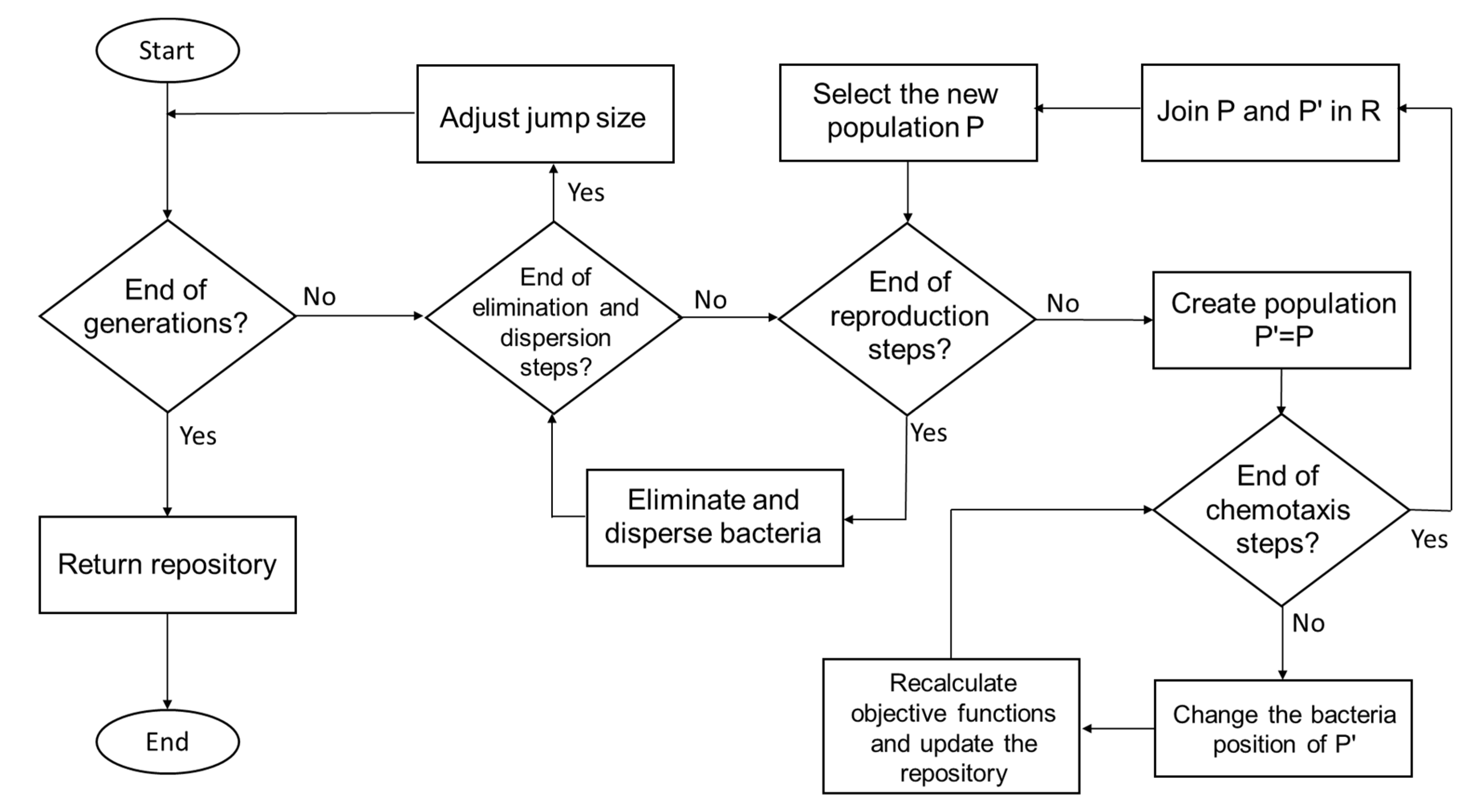
3.5. The Multi-Objective Bacteria Culture Optimization Hybrid Algorithm
- Create N population with S-size and randomly spread individuals through the search space.
- Evaluate each individual for each one of the M objectives.
- Individuals who present solutions not dominated by other individuals are inserted in file P, that is, solutions that are not worse for each of the objectives found and better in at least one goal. These solutions are considered the approximate Pareto border [35].
- The solutions in file A are mapped in the parallel cell coordinate system (PCCS) [32]. That is, each solution receives a label that is an integer between 1 and |A| (size of A) according to the Equation (8), where n is the solution indicator (1, 2, …,|A|), m is the objective indicator, is the value of solution n, for objective m, is the highest value found for objective m and is the lowest value found for objective m. The value is rounded up, and when , the value is changed to 1 to avoid division by zero.
- If the file size exceeds the maximum size S, the densities of all solutions must be calculated, and the highest density is eliminated. The density calculation of a solution is done based on the distances between pairs of solutions, as shown in the following equations:
- For each generation, with the values of the labels, the entropy of the population is calculated, which measures the uniformity of the approximation of the Pareto border. Equation (11) shows the entropy calculation for generation t, where K is |A|, M is the number of objectives and is the number of solutions with the label in the k-th row and m-th column of the PCCS.
- The adjustment in the jump size of bacteria is made with the differential according to the evolutionary state of the population, which can be a state of convergence, state of diversity, and state of stagnation. The threshold for the convergence state is given by and the threshold for the stagnant state is given by where S is the maximum file size.
- Given the thresholds, the adjustment of the jump size C is given by the following equation, where λ and μ are the adjustments and K(t) is the number of solutions in A the generation t.
- For each one of the Ned steps of elimination and dispersion is made the reproduction process.
- For each of the Nrep steps of reproduction is carried out the process of chemotaxis. A new population is generated P’ copying the values of the population P, and for each step of chemotaxis Nch, the population P’ is updated recalculating the position of each individual according to the equation (14), where is is the position of the i-th bacterium in the ch-th step of chemotaxis, r- th stage of reproduction and ed-th elimination and dispersion step, is a random vector that represents the direction in which the bacterium jump and is the size of the jump.
- All bacteria are evaluated for all purposes, and file P is updated with the previous procedure.
- Once the chemotaxis process is finished, a new population is generated through non-dominance ordering [20]. The N population is merged with the N’ population in a set R. All solutions from the Pareto border are selected. When the number of solutions found is less than S, they are added in the new population N and removed from R. A new Pareto border, that is, the rank 2 border, is selected from R. If the number of members of that border is less than S − |N|, they are also added in N and removed from R, and so on.
- 13.
- Once the reproduction steps are completed, individuals are eliminated and dispersed in the search space with a probability .
- 14.
- After the elimination and dispersion steps, a new adjustment in the jump size is made and finished the generations. File P contains the best solutions found.
4. Results and Comparisons in Distribution Networks
4.1. Applying the Proposed Methodology
4.2. Parameter Adjustment
4.3. Test System I: 70-Buses Network
4.3.1. Single Short-Circuit
4.3.2. Double Short-Circuit
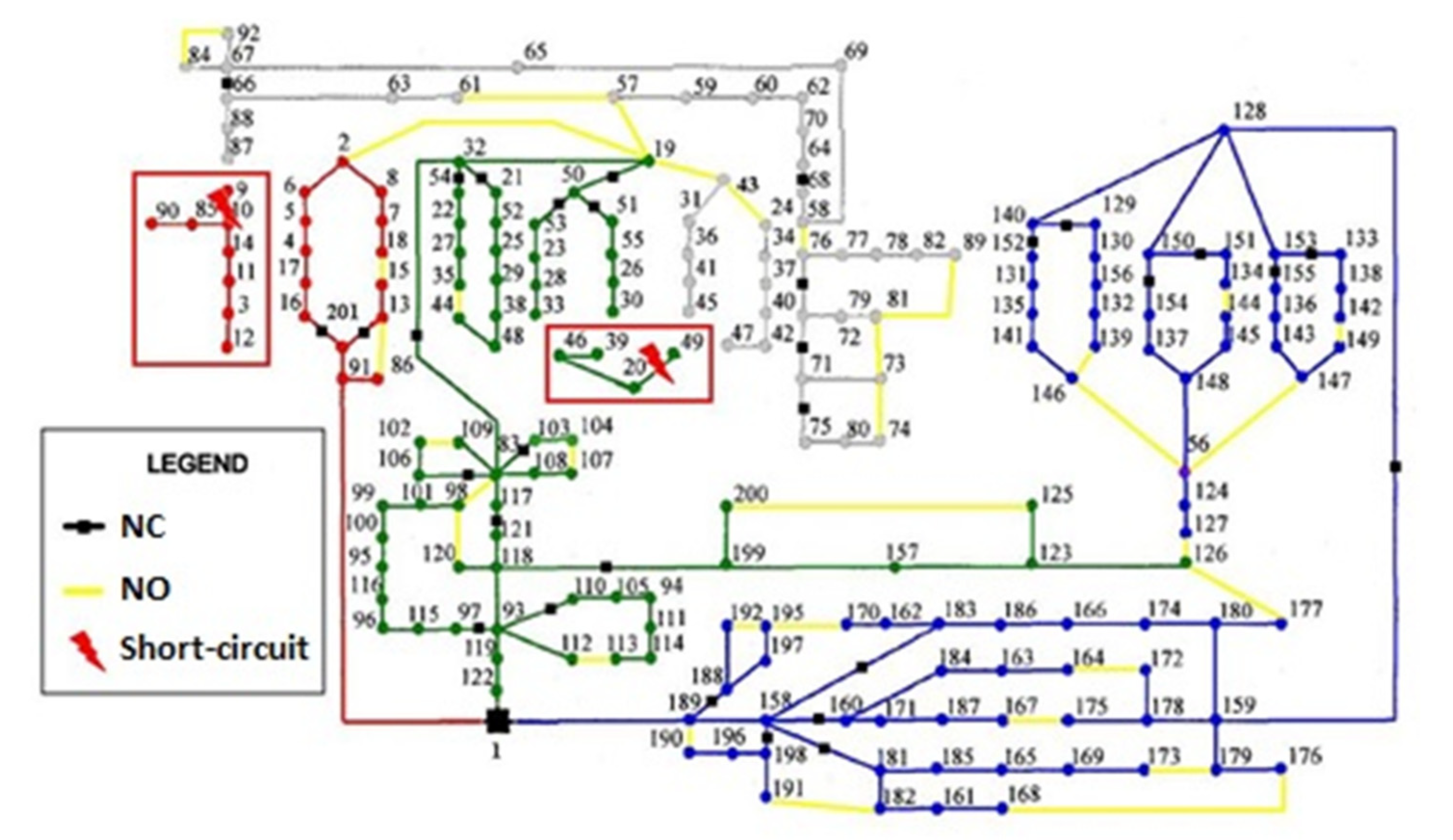
4.4. Test System II: 210-Buses Network
4.4.1. Single Short-Circuit
4.4.2. Double Short-Circuit
4.4.3. Comparison between Methods
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Del Real, A.J.; Pastor, A.; Durán, J. Generic Framework for the Optimal Implementation of Flexibility Mechanisms in Large-Scale Smart Grids. Energies 2021, 14, 8063. [Google Scholar] [CrossRef]
- Akil, M.; Dokur, E.; Bayindir, R. The SOC Based Dynamic Charging Coordination of EVs in the PV-Penetrated Distribution Network Using Real-World Data. Energies 2021, 14, 8508. [Google Scholar] [CrossRef]
- Gu, C.; Zhang, Y.; Wang, J.; Li, Q. Joint planning of electrical storage and gas storage in power-gas distribution network considering high-penetration electric vehicle and gas vehicle. Appl. Energy 2021, 301, 117447. [Google Scholar] [CrossRef]
- Golshani, A.; Sun, W.; Zhou, Q.; Zheng, Q.P.; Tong, J. Two-Stage Adaptive Restoration Decision Support System for a Self-Healing Power Grid. IEEE Trans. Ind. Inform. 2017, 13, 2802–2812. [Google Scholar] [CrossRef]
- Siebert, L.C.; Sbicca, A.; Aoki, A.R.; Lambert-Torres, G. A Behavioral Economics Approach to Residential Electricity Consumption. Energies 2017, 10, 768. [Google Scholar] [CrossRef]
- Esmin, A.A.A.; Lambert-Torres, G.; de Souza, A.C.Z. A hybrid particle swarm optimization applied to loss power minimization. IEEE Trans. Power Syst. 2005, 20, 859–866. [Google Scholar] [CrossRef]
- Torres, B.S.; Ferreira, L.R.; Aoki, A.R. Distributed Intelligent System for Self-Healing in Smart Grids. IEEE Trans. Power Deliv. 2018, 33, 2394–2403. [Google Scholar] [CrossRef]
- Poudel, S.; Dubey, A. Critical Load Restoration Using Distributed Energy Resources for Resilient Power Distribution System. IEEE Trans. Power Syst. 2019, 34, 52–63. [Google Scholar] [CrossRef]
- Li, Y.; Xiao, J.; Chen, C.; Tan, Y.; Cao, Y. Service Restoration Model With Mixed-Integer Second-Order Cone Programming for Distribution Network With Distributed Generations. IEEE Trans. Smart Grid 2019, 10, 4138–4150. [Google Scholar] [CrossRef]
- Gush, T.; Bukhari, S.B.A.; Haider, R.; Admasie, S.; Oh, Y.U.; Cho, G.Y.; Kim, C.H. Fault detection and location in a microgrid using mathematical morphology and recursive least square methods. Int. J. Electr. Power Energy Syst. 2018, 102, 324–331. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar] [CrossRef]
- Holland, J.H. Genetic Algorithms and the Optimal Allocation of Trials. SIAM J. Comput. 1973, 2, 88–105. [Google Scholar] [CrossRef]
- Lambert-Torres, G.; Martins, H.G.; Coutinho, M.P.; Salomon, C.P.; Vieira, F.C. Particle Swarm Optimization applied to system restoration. In Proceedings of the 2009 IEEE Bucharest PowerTech, Bucharest, Romania, 28 June–2 July 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Lin, W.-C.; Huang, W.-T.; Yao, K.-C.; Chen, H.-T.; Ma, C.-C. Fault Location and Restoration of Microgrids via Particle Swarm Optimization. Appl. Sci. 2021, 11, 7036. [Google Scholar] [CrossRef]
- Zou, K.; Mohy-ud-din, G.; Agalgaonkar, A.P.; Muttaqi, K.M.; Perera, S. Distribution System Restoration with Renewable Resources for Reliability Improvement Under System Uncertainties. IEEE Trans. Ind. Electron. 2020, 67, 8438–8449. [Google Scholar] [CrossRef]
- Mendoza, J.; Lopez, R.; Morales, D.; Lopez, E.; Dessante, P.; Moraga, R. Minimal loss reconfiguration using genetic algorithms with restricted population and addressed operators: Real application. IEEE Trans. Power Deliv. 2006, 21, 948–954. [Google Scholar] [CrossRef]
- Tomoiagă, B.; Chindriş, M.; Sumper, A.; Sudria-Andreu, A.; Villafafila-Robles, R. Pareto Optimal Reconfiguration of Power Distribution Systems Using a Genetic Algorithm Based on NSGA-II. Energies 2013, 6, 1439–1455. [Google Scholar] [CrossRef]
- Čađenović, R.; Jakus, D.; Sarajčev, P.; Vasilj, J. Optimal Distribution Network Reconfiguration through Integration of Cycle-Break and Genetic Algorithms. Energies 2018, 11, 1278. [Google Scholar] [CrossRef]
- Niu, B.; Wang, H.; Wang, J.; Tan, L. Multi-objective bacterial foraging optimization. Neurocomputing 2013, 116, 336–345. [Google Scholar] [CrossRef]
- Kaur, M.; Kadam, S. A novel multi-objective bacteria foraging optimization algorithm (MOBFOA) for multi-objective scheduling. Appl. Soft Comput. 2018, 66, 183–195. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. Part B 1996, 26, 29–41. [Google Scholar] [CrossRef]
- Selva Rani, B.; Aswani Kumar, C. A Comprehensive Review on Bacteria Foraging Optimization Technique. In Multi-Objective Swarm Intelligence. Studies in Computational Intelligence; Dehuri, S., Jagadev, A., Panda, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; Volume 592. [Google Scholar] [CrossRef]
- Panda, A.; Pani, S. A Symbiotic Organisms Search algorithm with adaptive penalty function to solve multi-objective constrained optimization problems. Appl. Soft Comput. 2016, 46, 344–360. [Google Scholar] [CrossRef]
- Ustun, D.; Çarbas, S.; Toktas, A. A symbiotic organisms search algorithm-based design optimization of constrained multi-objective engineering design problems. Eng. Comput. 2020, 38, 632–658. [Google Scholar] [CrossRef]
- Passino, K.M. Biomimicry of bacterial foraging for distributed optimization and control. IEEE Control. Syst. Mag. 2002, 22, 52–67. [Google Scholar] [CrossRef]
- Berg, H.; Brown, D. Chemotaxis in Escherichia coli analysed by Three-dimensional Tracking. Nature 1972, 239, 500–504. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Long, K.; Wang, J.; Dressler, F. On Swarm Intelligence Inspired Self-Organized Networking: Its Bionic Mechanisms, Designing Principles and Optimization Approaches. IEEE Commun. Surv. Tutor. 2014, 16, 513–537. [Google Scholar] [CrossRef]
- Li, Z.; Tian, M.; Zhao, Y.; Zhang, Z.; Ying, Y. Development of an Integrated Performance Design Platform for Residential Buildings Based on Climate Adaptability. Energies 2021, 14, 8223. [Google Scholar] [CrossRef]
- Nasrullah, A.I.H.; Puji Santosa, S.; Widagdo, D.; Arifurrahman, F. Structural Lattice Topology and Material Optimization for Battery Protection in Electric Vehicles Subjected to Ground Impact Using Artificial Neural Networks and Genetic Algorithms. Materials 2021, 14, 7618. [Google Scholar] [CrossRef]
- Qi, J.; Wu, D. Green Energy Management of the Energy Internet Based on Service Composition Quality. IEEE Access 2018, 6, 15723–15732. [Google Scholar] [CrossRef]
- Yi, J.; Huang, D.; Fu, S.; He, H.; Li, T. Multi-Objective Bacterial Foraging Optimization Algorithm Based on Parallel Cell Entropy for Aluminum Electrolysis Production Process. IEEE Trans. Ind. Electron. 2016, 63, 2488–2500. [Google Scholar] [CrossRef]
- Hu, W.; Yen, G.G. Adaptive Multiobjective Particle Swarm Optimization Based on Parallel Cell Coordinate System. IEEE Trans. Evol. Comput. 2015, 19, 1–18. [Google Scholar] [CrossRef]
- Mansour, M.R.; Santos, A.C.; London, J.B.; Delbem, A.C.B.; Bretas, N.G. Energy restoration in distribution systems using multi-objective evolutionary algorithm and an efficient data structure. In Proceedings of the 2009 IEEE Bucharest PowerTech, Bucharest, Romania, 28 June–2 July 2009; pp. 1–7. [Google Scholar] [CrossRef]
- Pandi, V.R.; Panigrahi, B.K.; Hong, W.C.; Sharma, R. A multi-objective bacterial foraging algorithm to solve the environmental economic dispatch problem. Energy Sources Part B Econ. Plan. Policy 2014, 9, 236–247. [Google Scholar] [CrossRef]
- Zaenudin, E.; Kistijantoro, A.I. pSPEA2: Optimization fitness and distance calculations for improving Strength Pareto Evolutionary Algorithm 2 (SPEA2). In Proceedings of the 2016 International Conference on Information Technology Systems and Innovation (ICITSI), Bandung, Indonesia, 24–27 October 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Das, D. A fuzzy multiobjective approach for network reconfiguration of distribution systems. IEEE Trans. Power Deliv. 2006, 21, 202–209. [Google Scholar] [CrossRef]
- Salomon, C.P.; Coutinho, M.P.; de Moraes, C.H.V.; Borges da Silva, L.E.; Lambert-Torres, G.; Aoki, A.R. Applications of Genetic Algorithm in Power System Control Centers. In Genetic Algorithms in Applications; Popa, R., Ed.; InTech: London, UK, 2012; pp. 201–222. [Google Scholar] [CrossRef][Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Execution 1 | Execution 2 |
|---|---|---|
| Ned | 2 | 2 |
| ped | 0.25 | 0.25 |
| Nrep | 4 | 4 |
| Nch | 60 | 120 |
| C | 50 | 50 |
| Λ | 2 | 2 |
| Μ | 10 | 10 |
| maxgen | 5 | 10 |
| Faulty Feeders | NO Switches | NC Switches | P(%) |
|---|---|---|---|
| 25–26 | 29–64 | None | 100% |
| None | None | 94.83% |
| Faulty Feeders | NO Switches | NC Switches | P(%) |
|---|---|---|---|
| 3–4 | 67–15 | None | 100% |
| 9–50 | |||
| 67–15 | None | 95.00% | |
| None | None | 89.34% |
| Faulty Feeders | NO Switches | NC Switches | P(%) |
|---|---|---|---|
| 3–4 25–26 | 9–50 29–64 45–60 9–15 | 44–45 | 100% |
| 22–67 67–15 9–50 29–64 | 65–66 | 100% | |
| 22–67 67–15 29–64 9–15 | 65–66 | 100% | |
| 9–15 29–64 9–50 | 44–45 | 97.56% | |
| 67–15 9–50 | None | 94.22% | |
| 67–15 | None | 88.86% | |
| None | None | 89.34% |
| Faulty Feeders | NO Switches | NC Switches | P(%) |
|---|---|---|---|
| 72–79 | 58–64 | None | 100% |
| None | None | 97.77% |
| Faulty Feeders | NO Switches | NC Switches | P(%) |
|---|---|---|---|
| 9–10 20–49 | 2–19 19–43 19–57 24–43 58–76 | 117–121 | 100% |
| 19–43 19–57 24–43 58–76 | 83–106 | 99.02% | |
| 19–43 19–57 58–76 | None | 95.83% | |
| 19–57 58–76 | None | 93.14% | |
| 19–57 | None | 85.48% | |
| None | None | 75.91% |
| Faulty Feeders | MOBFOHA | PSO | GA | ||||||
|---|---|---|---|---|---|---|---|---|---|
| NO | NC | P(%) | NO | NC | P(%) | NO | NC | P(%) | |
| 1–91 | 2–19 20–56 | 20–48 | 100% | 2–19 20–56 | 20–48 | 100% | 2–9 19–57 76–58 | 70–62 67–65 | 82.62% |
| 19–57 20–56 | 20–48 | 100% | - | - | - | - | - | - | |
| 2–19 | 12–201 | 86.75% | - | - | - | - | - | - | |
| None | None | 82.62% | - | - | - | - | - | - | |
| 76–77 | 81–89 | None | 100% | 81–89 | None | 100% | 81–89 | None | 100% |
| None | None | 98.16% | - | - | - | - | - | - | |
| 93–110 | 112–113 | None | 100% | 112–113 | None | 100% | 112–113 | None | 100% |
| None | None | 95.68 | - | - | - | - | - | - | |
| 128–140 | 56–146 | None | 100% | 56–146 | None | 100% | 56–146 | None | 100% |
| None | None | 93.62 | - | - | - | - | - | - | |
| Faulty Feeders | MOBFOHA | PSO | GA | ||||||
|---|---|---|---|---|---|---|---|---|---|
| NO | NC | P(%) | NO | NC | P(%) | NO | NC | P(%) | |
| 1–91 | 58–76 126–127 | 117–121 | 100% | - | - | - | - | - | - |
| 58–76 126–177 | 117–121 | 100% | 58–76 126–177 | 117–121 | 100% | - | - | - | |
| 19–57 20–56 | 20–48 | 100% | 19–57 20–56 | 20–48 | 100% | - | - | - | |
| 19–57 126–127 | 117–121 | 100% | 19–57 126–127 | 117–121 | 100% | - | - | - | |
| 19–57 126–177 | 117–121 | 100% | 19–57 126–177 | 117–121 | 100% | - | - | - | |
| 2–19 20–56 | 20–48 | 100% | - | - | - | - | - | - | |
| 2–19 126–177 | 117–121 | 100% | 2–19 126–177 | 117–121 | 100% | - | - | - | |
| 19–57 | 117–121 | 87.68% | - | - | - | - | - | - | |
| 58–76 | 117–121 | 87.68% | - | - | - | 2–9 19–57 | 58–68 | 82.62 | |
| 2–19 | 117–121 | 87.68% | - | - | - | 2–9 19–57 76–58 | 69–58 19–57 | 82.62 | |
| None | None | 54.51% | - | - | - | - | - | - | |
| 1–189 | 2–19 126–127 | 117–121 | 100% | - | - | - | - | - | - |
| 58–76 126–127 | 117–121 | 100% | 58–76 126–127 | 117–121 | 100% | 126–127 | - | 62.87% | |
| 19–57 126–177 | 117–121 | 100% | 19–57 126–177 | 117–121 | 100% | 126–127 126–177 | 124–127 | 62.87% | |
| 2–19 126–177 | 117–121 | 100% | 2–19 126–177 | 117–121 | 100% | - | - | - | |
| 58–76 126–177 | 117–121 | 100% | 58–76 126–177 | 117–121 | 100% | 58–76 126–177 | 117–121 | 100% | |
| None | None | 62.87% | - | - | - | - | - | - | |
| 19–32 | 33–46 | None | 100% | 33–46 | None | 100% | 33–46 | None | 100% |
| 2–19 | None | 100% | 2–19 | None | 100% | 2–19 | None | 100% | |
| 19–43 | None | 100% | 19–43 | None | 100% | 19–43 | None | 100% | |
| 30–39 | None | 100% | 30–39 | None | 100% | 30–39 | None | 100% | |
| None | None | 93.91 | - | - | - | - | - | - | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moraes, C.H.V.d.; Vilas Boas, J.L.d.; Lambert-Torres, G.; Andrade, G.C.C.d.; Costa, C.I.d.A. Intelligent Power Distribution Restoration Based on a Multi-Objective Bacterial Foraging Optimization Algorithm. Energies 2022, 15, 1445. https://doi.org/10.3390/en15041445
Moraes CHVd, Vilas Boas JLd, Lambert-Torres G, Andrade GCCd, Costa CIdA. Intelligent Power Distribution Restoration Based on a Multi-Objective Bacterial Foraging Optimization Algorithm. Energies. 2022; 15(4):1445. https://doi.org/10.3390/en15041445
Chicago/Turabian StyleMoraes, Carlos Henrique Valério de, Jonas Lopes de Vilas Boas, Germano Lambert-Torres, Gilberto Capistrano Cunha de Andrade, and Claudio Inácio de Almeida Costa. 2022. "Intelligent Power Distribution Restoration Based on a Multi-Objective Bacterial Foraging Optimization Algorithm" Energies 15, no. 4: 1445. https://doi.org/10.3390/en15041445
APA StyleMoraes, C. H. V. d., Vilas Boas, J. L. d., Lambert-Torres, G., Andrade, G. C. C. d., & Costa, C. I. d. A. (2022). Intelligent Power Distribution Restoration Based on a Multi-Objective Bacterial Foraging Optimization Algorithm. Energies, 15(4), 1445. https://doi.org/10.3390/en15041445