
Assessing the Environmental Performances of Urban Roundabouts Using the VSP Methodology and AIMSUN

 ,
,  ,
, 
 ,
,  and
and 
Abstract
:1. Introduction
The Aim of the Paper
2. Literature Review
- (1)
- Societal—It allows to send the collected trajectory in a central management platform able of processing a considerable amount of data, converting them into digital information to estimate traffic emissions from the mobile source, and then, returning data to the community of users equipped with their smartphones to collectively share information, for instance, about hotspot emission locations at urban roundabouts;
- (2)
- Scientific—It identifies certain parameters of driving behaviour using a traffic modelling approach aimed at accurately analysing and comparing road units (i.e., road segments or road intersections, and so on) when changes in design or operation are considered from an environmental point of view as the life cycle thinking approaches strongly require.
3. Materials and Methods
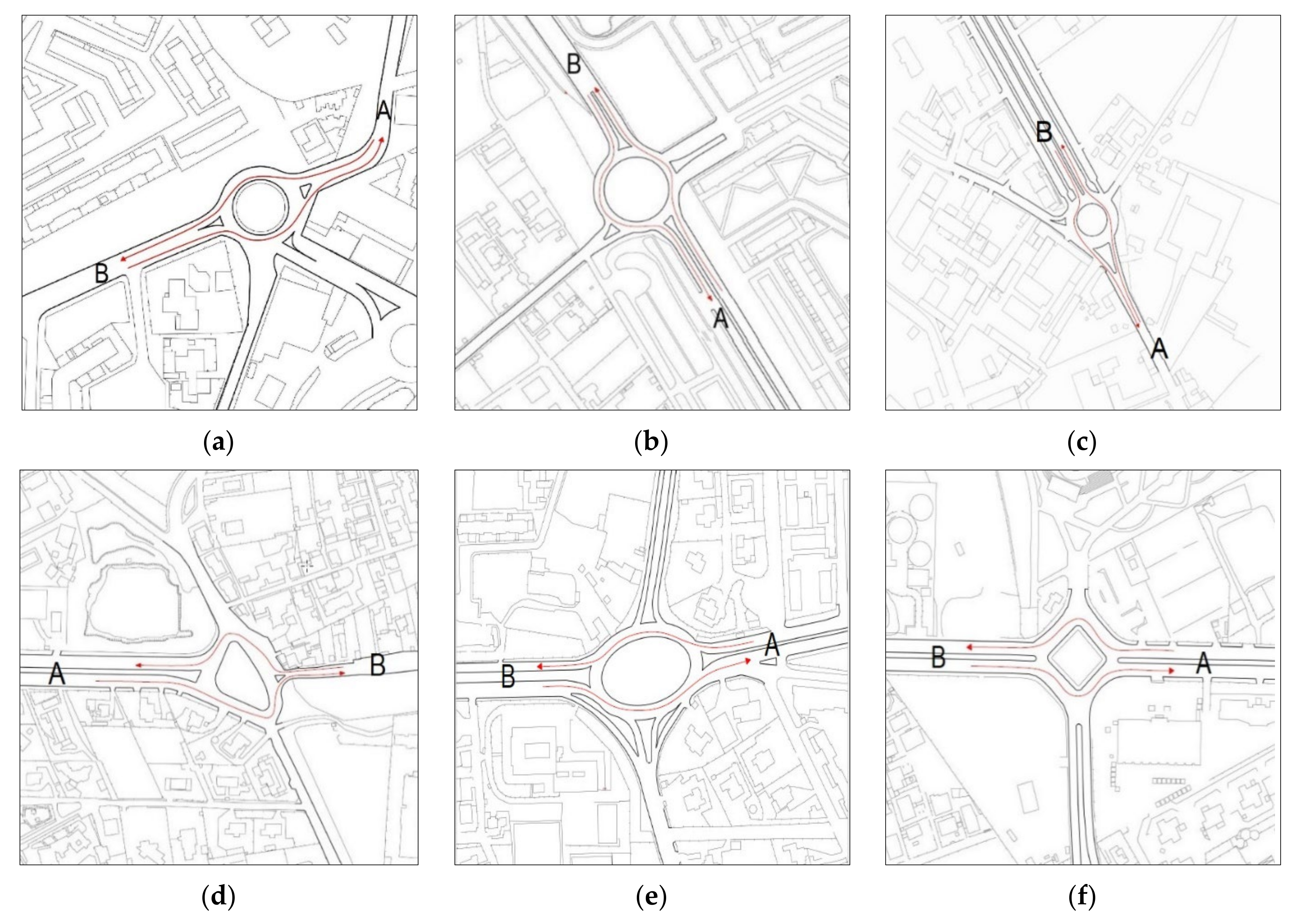
3.1. Field Data Collection
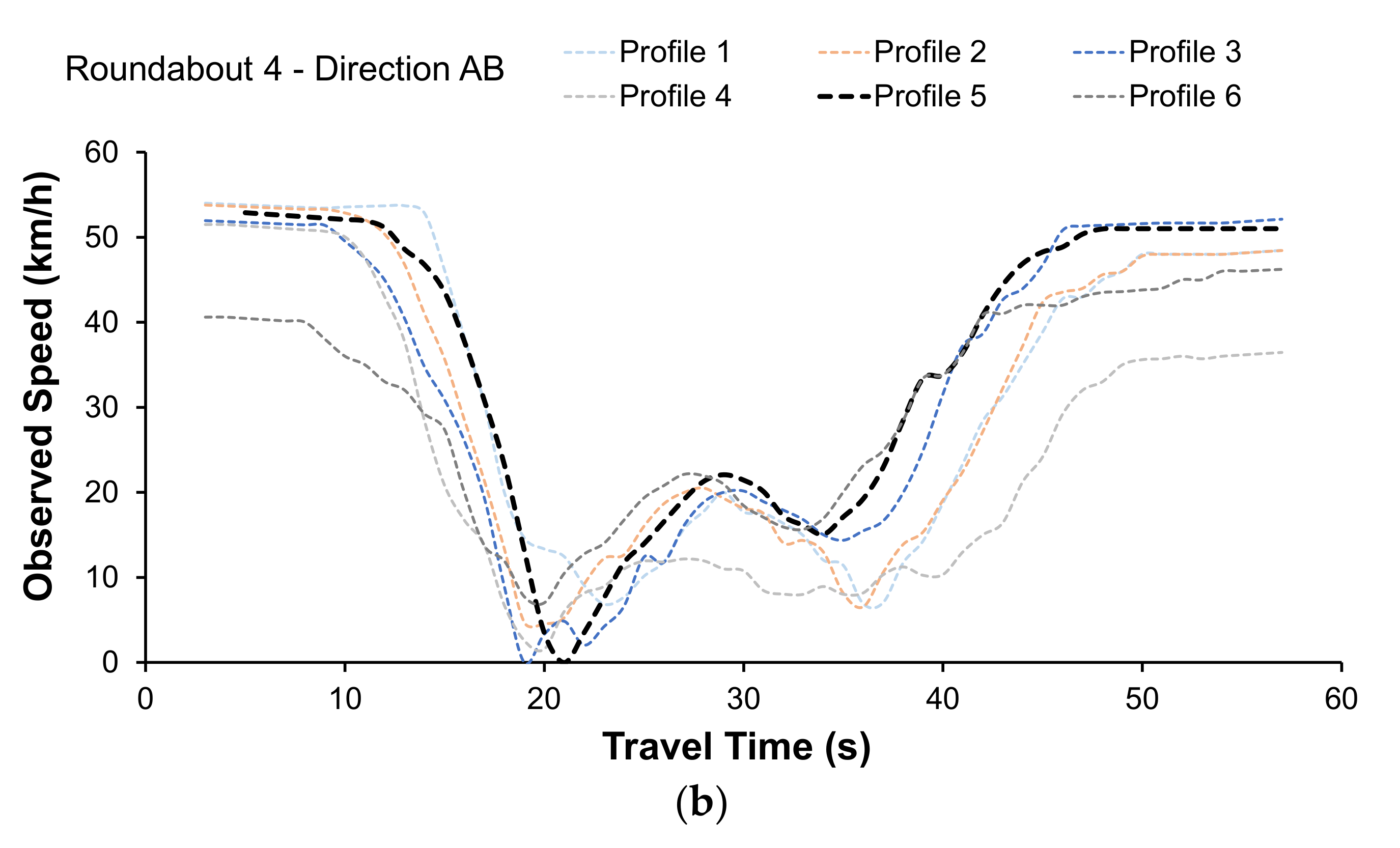
3.2. Characterisation of the Speed-Time Profiles
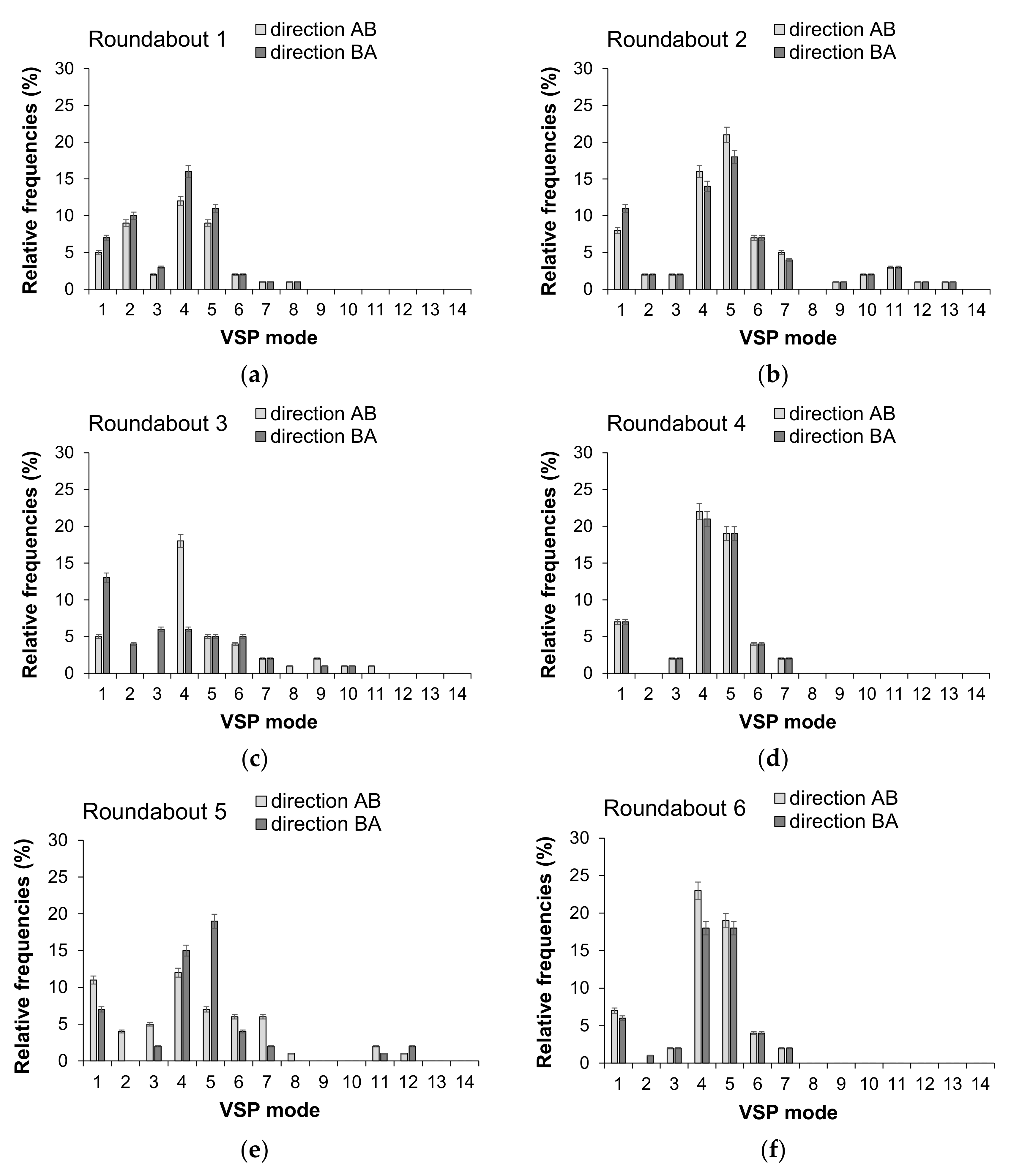
3.3. The VSP Methodology
4. AIMSUN Modelling
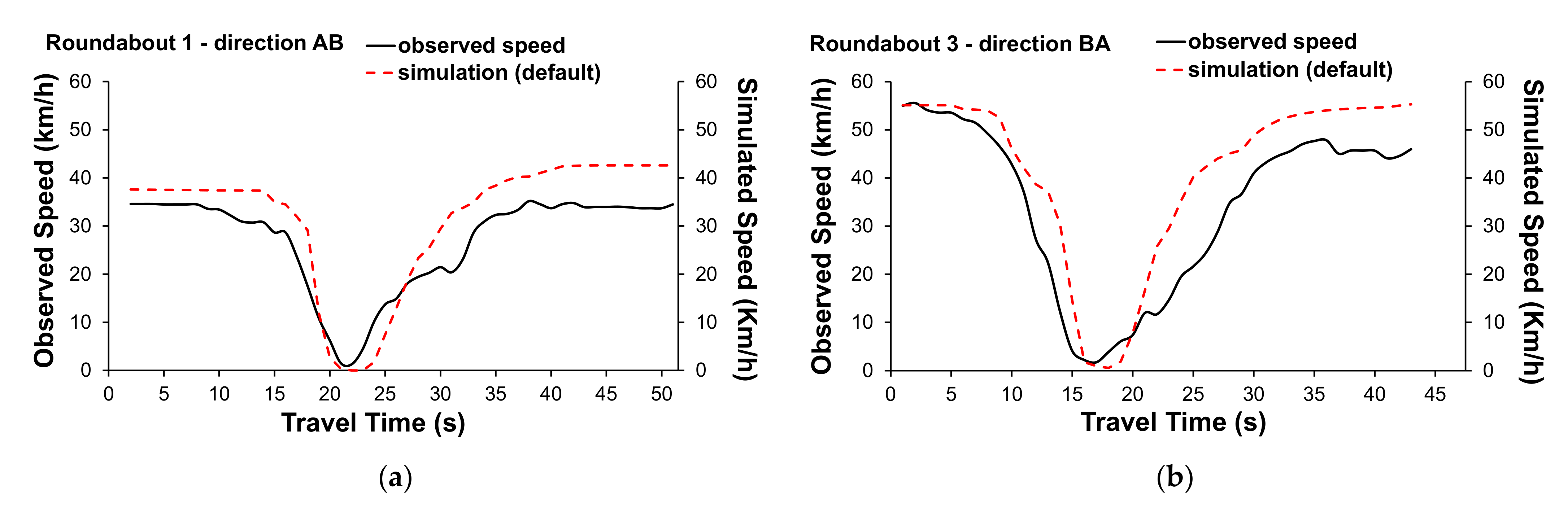
4.1. AIMSUN Calibration
4.2. Results
5. Discussion
6. Conclusions
- (1)
- The selected test vehicle driven in the field;
- (2)
- Interactions with pedestrians or cyclists;
- (3)
- Variability in driving behaviour profiles experienced in the field;
- (4)
- Comparison of emissions just for one diesel car;
- (5)
- Roundabouts located in flat roads;
- (6)
- The selected driving movements here considered.
- the chance to expand the roundabout sample in order to afford the general validation of the proposed methodology and to make a correlation between the prevailing geometric characteristics and the results obtained in terms of emissions; this is closely linked both to the use of more sentinel vehicles to better characterize the speed profiles experienced through the road units, given that the relative occurrence of each possible profile may be sensitive to the prevailing traffic levels or entry demand;
- the calibration process that should also include the “global parameters” or further “local parameters” of AIMSUN for their possible effects on the simulated vehicle activity, however in combination with the “vehicle attributes” that were here fine-tuned based on the percentile values extracted from the parameter distributions surveyed in the field;
- the transferability of the methodology should be tested with reference to other design alternatives to assess the environmental effects due to the conversion of an existing layout to another with similar space footprint, and to estimate the life-cycle costs of intersection design alternatives before the installation in the real world.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Martins, V.; Anholon, R.; Quelhas, O. Sustainability Transportation Methods. In Encyclopedia of Sustainability in Higher Education; Filho, W.L., Ed.; Springer Nature: Cham, Switzerland, 2019; pp. 1–7. [Google Scholar]
- The Paris Agreement. 2016 United Nations Framework Convention on Climate Change (UNFCCC). Available online: https://unfccc.int/sites/default/files/resource/parisagreement_publication.pdf (accessed on 20 November 2021).
- Communication from the Commission: The European Green Deal. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?qid=1588580774040&uri=CELEX:52019DC0640 (accessed on 20 November 2021).
- Horan, T.; Rae Zimmerman, R. Digital Infrastructures: Enabling Civil and Environmental Systems through Information Technology; Networked Cities Series; Routledge: London, UK, 2004; 272p. [Google Scholar]
- Litman, T. Autonomous Vehicle Implementation Predictions: Implications for Transport Planning; Victoria Transport Policy Institute: Victoria, BC, Canada, 2020. [Google Scholar]
- Frey, H.C. Trends in on-road transportation energy and emissions. J. Air Waste Manag. Assoc. 2018, 68, 514–563. [Google Scholar] [CrossRef]
- Abdelrahman, A.; El-Wakeel, A.S.; Noureldin, A.; Hassanein, H.S. Crowdsensing-Based Personalized Dynamic Route Planning for Smart Vehicles. IEEE Netw. 2020, 34, 216–223. [Google Scholar] [CrossRef]
- Castignani, G.; Derrmann, T.; Frank, R.; Engel, T. Driver Behavior Profiling Using Smartphones: A Low-Cost Platform for Driver Monitoring. IEEE Intell. Transp. Syst. Mag. 2015, 7, 91–102. [Google Scholar] [CrossRef]
- Rapa, M.; Gobbi, L.; Ruggieri, R. Environmental and Economic Sustainability of Electric Vehicles: Life Cycle Assessment and Life Cycle Costing Evaluation of Electricity Sources. Energies 2020, 13, 6292. [Google Scholar] [CrossRef]
- Monzon, A.; Wang, Y. Toward Sustainable and Low Carbon Road Transportation: Policies, Tools, and Planning Methods. Sustainability 2019, 11, 1709. [Google Scholar] [CrossRef] [Green Version]
- Hamadneh, J.; Esztergár-Kiss, D. The Influence of Introducing Autonomous Vehicles on Conventional Transport Modes and Travel Time. Energies 2021, 14, 4163. [Google Scholar] [CrossRef]
- Lyu, P.; Wang, P.S.; Liu, Y.; Wang, Y. Review of the studies on emission evaluation approaches for operating vehicles. J. Traffic Transp. Eng. (Engl. Ed.) 2021, 8, 493–509. [Google Scholar] [CrossRef]
- Fernandes, P.; Macedo, E.; Bahmankhah, B.; Tomas, R.F.; Bandeira, J.M.; Coelho, M.C. Are internally observable vehicle data good predictors of vehicle emissions? Transp. Res. Part D Transp. Environ. 2019, 77, 252–270. [Google Scholar] [CrossRef]
- Jiménez-Palacios, J.L. Understanding and Quantifying Motor Vehicle Emissions with Vehicle Specific Power and TILDAS Remote Sensing. Ph.D. Thesis, Massachusetts Institute of Technology, Department of Mechanical Engineering, Cambridge, MA, USA, 1999. [Google Scholar]
- Wyatt, D.W.; Li, H.; Tate, J.E. The impact of road grade on carbon dioxide (CO2) emission of a passenger vehicle in real-world driving. Transp. Res. Part D Transp. Environ. 2014, 32, 160–170. [Google Scholar] [CrossRef] [Green Version]
- Jaworski, A.; Mądziel, M.; Lejda, K. Creating an emission model based on portable emission measurement system for the purpose of a roundabout. Environ. Sci. Pollut. Res. Int. 2019, 26, 21641–21654. [Google Scholar] [CrossRef] [Green Version]
- Oh, G.; Peng, H. Eco-driving at Signalized Intersections: What is Possible in the Real-World? In Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 3674–3679. [Google Scholar]
- Ntziachristos, L.; Gkatzoflias, D.; Kouridis, C.; Samaras, Z. COPERT: A European Road Transport Emission Inventory Model. In Information Technologies in Environmental Engineering. Environmental Science and Engineering; Athanasiadis, I.N., Rizzoli, A.E., Mitkas, P.A., Gómez, J.M., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 491–504. [Google Scholar]
- EMFAC 2017 Volume I—User’s Guide V1.0.2 Mobile Source Analysis Branch, Air Quality Planning & Science Division, California Air Resource Board Sacramento, CA 2018. Available online: https://www.arb.ca.gov/msei/downloads/emfac2017-volume-i-users-guide.pdf (accessed on 6 December 2021).
- EMFAC-HK Vehicle Emission Calculation. Available online: https://www.epd.gov.hk/epd/english/environmentinhk/air/guide_ref/emfac-hk.html (accessed on 6 December 2021).
- Tchepel, O.; Costa, A.M.; Amorim, J.H.; Miranda, A.; Borrego, C. Transport emission model and dispersion study for Lisbon air quality at local scale. In Proceedings of the 11th International Symposium, Transport and Air Pollution, Graz, Austria, 19–21 July 2002; Volume I, pp. 109–116. [Google Scholar]
- Akçelik, R.; Smit, R.; Besley, M. Recalibration of a vehicle power model for fuel and emission estimation and its effect on assessment of alternative intersection treatments. In Proceedings of the 4th International Roundabout Conference, Seattle, WA, USA, 16–18 April 2014. [Google Scholar]
- Transportation Research Board and National Research Council. Modeling Mobile-Source Emissions; The National Academies Press: Washington, DC, USA, 2000. [Google Scholar] [CrossRef]
- Fernandes, P.; Pereira, S.R.; Bandeira, J.M.; Vasconcelos, L.; Bastos Silva, A.; Coelho, M.C. Driving around turbo-roundabouts vs. conventional roundabouts: Are there advantages regarding pollutant emissions? Int. J. Sustain. Transp. 2016, 10, 847–860. [Google Scholar] [CrossRef]
- National Academies of Sciences, Engineering, and Medicine. Predicting Air Quality Effects of Traffic-Flow Improvements: Final Report and User’s Guide; The National Academies Press: Washington, DC, USA, 2005. [Google Scholar] [CrossRef]
- Ryu, B.Y.; Jung, H.J.; Bae, S.H. Development of a corrected average speed model for calculating carbon dioxide emissions per link unit on urban roads. Transp. Res. Part D 2015, 34, 245–254. [Google Scholar] [CrossRef]
- US EPA. Population and Activity of On-Road Vehicles in MOVES2014; United States Environmental Protection Agency (US EPA): Washington, DC, USA, 2016.
- Smit, R.; Smokers, R.; Schoen, E. VERSIT+ LD: Development of a new emission factor model for passenger cars linking real-world emissions to driving cycle characteristics. In Proceedings of the 14th Symposium Transport and Air Pollution, Graz, Austria, 1–3 June 2005; Volume 1, pp. 177–186. [Google Scholar]
- Zeng, W.; Miwa, T.; Morikawa, T. Prediction of vehicle CO2 emission and its application to eco-routing navigation. Transp. Res. Part C 2016, 68, 194–214. [Google Scholar] [CrossRef]
- Hao, P.; Boriboonsomsin, K.; Wu, G.; Barth, M.J. Modal Activity-Based Stochastic Model for Estimating Vehicle Trajectories from Sparse Mobile Sensor Data. IEEE Trans. Intell. Transp. Syst. 2017, 18, 701–711. [Google Scholar] [CrossRef]
- Barceló, J. Fundamentals of Traffic Simulation, 1st ed.; Springer: London, UK, 2010. [Google Scholar]
- Rahimi, A.M.; Dulebenets, M.A.; Mazaheri, A. Evaluation of Microsimulation Models for Roadway Segments with Different Functional Classifications in Northern Iran. Infrastructures 2021, 6, 46. [Google Scholar] [CrossRef]
- AIMSUN, Version 8 Dynamic Simulator User Manual; TSS-Transport Simulation Systems: Barcelona Spain, 2011.
- National Academies of Sciences, Engineering, and Medicine. Roundabouts: An Informational Guide, 2nd ed.; The National Academies Press: Washington, DC, USA, 2010. [Google Scholar] [CrossRef]
- Giuffrè, O.; Granà, A.; Giuffrè, T.; Acuto, F.; Lo Pinto, A. Life-Cycle Costing Decision-Making Methodology and Urban Intersection Design: Modelling and Analysis for a Circular City. In Methods in Modern Urban Transportation Systems and Networks; Macioszek, E., Sierpiński, G., Eds.; Springer Nature: Cham, Switzerland, 2021; pp. 59–86. [Google Scholar]
- Parikka-Alhola, K.; Nissinen, A. Environmental impacts of transport as award criteria in public road construction procurement. Int. J. Constr. Manag. 2014, 12, 35–49. [Google Scholar] [CrossRef]
- Hallmark, S.L.; Wang, B.; Mudgal, A.; Isebrands, H. On-Road Evaluation of Emission Impacts of Roundabouts. Transp. Res. Rec. 2011, 2265, 226–233. [Google Scholar] [CrossRef]
- Coelho, M.C.; Farias, T.L.; Rouphail, N.M. Effect of roundabout operations on pollutant emissions. Transp. Res. Part D Transp. Environ. 2006, 11, 333–343. [Google Scholar] [CrossRef]
- Salamati, K.; Coelho, M.; Fernandes, P.; Rouphail, N.M.; Frey, H.C.; Bandeira, J. Emission Estimation at Multilane Roundabouts: Effect of Movement and Approach Lane. Transp. Res. Rec. 2014, 2389, 12–21. [Google Scholar] [CrossRef] [Green Version]
- Fernandes, P.; Salamati, K.; Rouphail, N.; Coelho, M. Identification of emission hotspots in roundabouts corridors. Transp. Res. Part D Transp. Environ. 2015, 37, 48–64. [Google Scholar] [CrossRef]
- Guerrieri, M.; Corriere, F.; Rizzo, G.; Casto, B.L.; Scaccianoce, G. Improving the Sustainability of Transportation: Environmental and Functional Benefits of Right Turn By-Pass Lanes at Roundabouts. Sustainability 2015, 7, 5838–5856. [Google Scholar] [CrossRef] [Green Version]
- Lakouari, N.; Oubram, O.; Bassam, A.; Pomares Hernandez, S.E.; Marzoug, R.; Ez-Zahraouy, H. Modeling and simulation of CO2 emissions in roundabout intersection. J. Comput. Sci. 2020, 40, 101072. [Google Scholar] [CrossRef]
- Mudgal, A.; Hallmark, S.; Carriquiry, A.; Gkritza, K. Driving behavior at a roundabout: A hierarchical Bayesian regression analysis. Transp. Res. Part D Transp. Environ. 2014, 26, 20–26. [Google Scholar] [CrossRef]
- Ahn, K.; Kronprasert, N.; Rakha, H. Energy and Environmental Assessment of High-Speed Roundabouts. Transp. Res. Rec. 2009, 2123, 54–65. [Google Scholar] [CrossRef]
- PTV. VISSIM Version 5, User Manual; Planung Transport Verkehr AG: Karlsruhe, Germany, 2008. [Google Scholar]
- Anya, A.R.; Rouphail, N.M.; Frey, H.C.; Schroeder, B. Application of AIMSUN Microsimulation Model to Estimate Emissions on Signalized Arterial Corridors. Transp. Res. Rec. 2014, 2428, 75–86. [Google Scholar] [CrossRef]
- Fernandes, P.; Coelho, M.C.; Rouphail, N.M. Assessing the impact of closely-spaced intersections on traffic operations and pollutant emissions on a corridor level. Transp. Res. Part D Transp. Environ. 2017, 54, 304–320. [Google Scholar] [CrossRef]
- Mądziel, M.; Campisi, T.; Jaworski, A.; Kuszewski, H.; Woś, P. Assessing Vehicle Emissions from a Multi-Lane to Turbo Roundabout Conversion Using a Microsimulation Tool. Energies 2021, 14, 4399. [Google Scholar] [CrossRef]
- Acuto, F. Integrating Vehicle specific Power Methodology and Microsimulation in Estimating emissions on Urban Roundabouts. Ph.D. Thesis, Department of Engineering, University of Palermo, Palermo, Italy, 2021. [Google Scholar]
- Fernandes, P.; Rouphail, N.M.; Coelho, C.M. Turboroundabouts along Corridors: Analysis of Operational and Environmental Impacts. Transp. Res. Rec. J. Transp. Res. Board 2017, 2627, 46–56. [Google Scholar] [CrossRef]
- Samaras, C.; Tsokolis, D.; Toffolo, S.; Magra, G.; Ntziachristos, L.; Samaras, Z. Improving fuel consumption and CO2 emissions calculations in urban areas by coupling a dynamic micro traffic model with an instantaneous emissions model. Transp. Res. Part D Transp. Environ. 2018, 65, 772–783. [Google Scholar] [CrossRef]
- Stogios, C.; Saleh, M.; Ganji, A.; Tu, R.; Xu, J.; Roorda, M.J.; Hatzopoulou, M. Determining the Effects of Automated Vehicle Driving Behavior on Vehicle Emissions and Performance of an Urban Corridor. In Proceedings of the TRB 97th Annual Meeting, Washington, DC, USA, 7–11 January 2018. [Google Scholar]
- Ministero delle Infrastrutture e dei Trasporti [Ministry of Infrastructure and Transport]. Available online: http://www.mit.gov.it/mit/mop_all.php?p_id=13799 (accessed on 18 December 2021).
- Schroeder, B.J.; Rouphail, N.; Salamati, K.; Bugg, Z. Effect of Pedestrian Impedance on Vehicular Capacity at Multilane Roundabouts with Consideration of Crossing Treatments. Transp. Res. Rec. J. Transp. Res. Board 2012, 2312, 14–24. [Google Scholar] [CrossRef]
- Coelho, M.C.; Frey, C.H.; Rouphail, N.M.; Zhai, H.; Pelkmans, L. Assessing methods for comparing emissions from gasoline and diesel light-duty vehicles based on microscale measurements. Transp. Res. Part D 2009, 14, 91–99. [Google Scholar] [CrossRef]
- Zhai, Z.; Song, G.; Lu, H.; He, W.; Yu, L. Validation of temporal and spatial consistency of facility- and speed-specific vehicle-specific power distributions for emission estimation: A case study in Beijing, China. J. Air Waste Manag. Assoc. 2017, 67, 949–957. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Zhu, K.; van Gelder, B.; Nagle, J.; Tuttle, C. Reconsideration of sample size requirements for field traffic data collection with global positioning system devices. Transp. Res. Rec. 2002, 1804, 17–22. [Google Scholar] [CrossRef]
- Bokare, P.S.; Maurya, A.K. Acceleration-Deceleration Behaviour of Various Vehicle Types. Transp. Res. Procedia 2017, 25, 4733–4749. [Google Scholar] [CrossRef]
- Wang, J.; Dixon, K.; Li, H.; Ogle, J. Normal acceleration behavior of passenger vehicles starting from rest at all-way stop-controlled intersections. Transp. Res. Rec. 2004, 1883, 158–166. [Google Scholar] [CrossRef]
- Wang, J.; Dixon, K.; Li, H.; Ogle, J. Normal deceleration behavior of passenger vehicles at stop sign controlled intersections evaluated within-vehicle global positioning system data. Transp. Res. Rec. 2005, 1937, 120–127. [Google Scholar] [CrossRef]
- Fernandes, P.; Tomás, R.; Acuto, F.; Pascale, A.; Bahmankhah, B.; Guarnaccia, C.; Granà, A.; Coelho, M.C. Impacts of roundabouts in suburban areas on congestion-specific vehicle speed profiles, pollutant and noise emissions: An empirical analysis. Sustain. Cities Soc. 2020, 62, 102386. [Google Scholar] [CrossRef]
- Giuffrè, O.; Granà, A.; Giuffrè, T.; Acuto, F.; Tumminello, M.L. Estimating pollutant emissions based on speed profiles at urban roundabouts: A pilot study. In Smart and Green Solutions for Transport Systems, Advances in Intelligent Systems and Computing; Sierpiński, G., Ed.; Springer: Heidelberg, Germany, 2020; Volume 1091, pp. 184–200. [Google Scholar]
- Jurecki, R.S.; Stanczyk, T.L. A Methodology for Evaluating Driving Styles in Various Road Conditions. Energies 2021, 14, 3570. [Google Scholar] [CrossRef]
- US EPA. Methodology for Developing Modal Emission Rates for EPA’s Multi-Scale Motor Vehicle & Equipment Emission System, Report number EPA420-R-02-027; United States Environmental Protection Agency (US EPA): Washington, DC, USA, 2002.
- Frey, H.C.; Unal, A.; Chen, J.J.; Song, L. Evaluation and Recommendation of a Modal Method for Modeling Vehicle Emissions. Corpus ID: 292981. 2003. Available online: https://www3.epa.gov/ttnchie1/conference/ei12/mobile/frey.pdf (accessed on 20 November 2021).
- Giuffrè, O.; Granà, A.; Tumminello, M.L.; Sferlazza, A. Capacity-based calculation of passenger car equivalents using traffic simulation at double-lane roundabouts. Simul. Model. Pract. Theory 2018, 81, 1–30. [Google Scholar] [CrossRef]
- Acuto, F.; Giuffrè, T.; Granà, A. Environmental Performance Evaluation at Urban Roundabouts. In Emerging Technologies and Applications for Green Infrastructure; Ha-Minh, C., Tang, A.M., Bui, T.Q., Vu, X.H., Huynh, D.V.K., Eds.; Lecture Notes in Civil Engineering; Springer: Singapore, 2022; Volume 203, pp. 1613–1621. [Google Scholar]
- Royal Haskoning DHV. Roundabouts—Application and Design. A Practical Manual. Available online: https://nmfv.dk/wp-content/uploads/2012/06/RDC_Netherlands.pdf (accessed on 20 November 2021).
- Acuto, F.; Giuffrè, T.; Granà, A. Environmental Performance Assessment of Urban Roundabouts. In Intelligent Solutions for Cities and Mobility of the Future; Lecture Notes in Networks and Systems; Sierpiński, G., Ed.; Springer: Cham, Switzerland, 2022; Volume 352, pp. 27–45. [Google Scholar]
- Vasconcelos, L.; Silva, A.B.; Seco, Á.M.; Fernandes, P.; Coelho, M.C. Turboroundabouts: Multicriterion Assessment of Intersection Capacity, Safety, and Emissions. Transp. Res. Rec. J. Transp. Res. Board 2014, 2402, 28–37. [Google Scholar] [CrossRef] [Green Version]
- Granà, A.; Giuffrè, T.; Macioszek, E.; Acuto, F. Estimation of Passenger Car Equivalents for Two-Lane and Turbo Roundabouts Using AIMSUN. Front. Built Environ. 2020, 6, 86. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Entry (Exit) | Outer Diameter [m] | Entry (Exit) Lane Width 1 [m] | Ring Width [m] | Entry Traffic 2 [vph] | Conflicting Traffic 3 [vph] | Entry (Exit) Speed 4 [km/h] | Circulating Speed [km/h] |
|---|---|---|---|---|---|---|---|---|
| 1 | 3 (4) | 48.0 | 3.50 (3.50) | 7.00 | 1576 | 1508 | 22.1 (30) | 18.2 |
| 2 | 4 (4) | 80.0 | 4.50 5 (4.50) | 8.00 | 3984 | 3196 | 25.9 (36) | 23.1 |
| 3 | 4 (4) | 50.0 | 3.50 (3.50) | 9.00 | 2336 | 1904 | 23.3 (31) | 19.9 |
| 4 | 4 (4) | 60.0 | 4.75 6 (4.75) | 10.00 | 1306 | 1372 | 29.8 (42) | 24.8 |
| 5 | 4 (4) | 80.0 | 4.00 (5.00 7) | 9.00 | 3992 | 2971 | 25.1 (35) | 23.1 |
| 6 | 4 (4) | 80.0 | 5.00 (4.50) | 10.00 | 988 | 972 | 30.0 (38) | 25.5 |
| Parameter | Maximum Speed [m/s] | Maximum Acceleration [m/s2] | Maximum Deceleration [m/s2] |
|---|---|---|---|
| μAB 1 (s.e.) | 14.459 (0.384) | 1.770 (0.077) | 2.498 (0.108) |
| μBA 1 (s.e.) | 14.117 (0.357) | 1.553 (0.074) | 2.417 (0.111) |
| 95% c.i. for difference in means | (−0.700, 1.385) | (0.004, 0.430) | (−0.227, 0.390) |
| t0.05,92 value 2 | 0.652 | 2.023 | 0.522 |
| t-critical value | 1.986 | 1.986 | 1.986 |
| p-Value (α = 0.05)3 | 0.516 | 0.05 | 0.603 |
| F0.05,46,46 value 4 | 1.158 | 1.102 | 0.946 |
| F-critical value | 1.796 | 1.796 | 1.796 |
| F-probability | 0.620 | 0.740 | 0.850 |
| Parameter | 85th Percentile Acceleration [m/s2] | 95th Percentile Acceleration [m/s2] | 85th Percentile Deceleration [m/s2] | 95th Percentile Deceleration [m/s2] |
|---|---|---|---|---|
| μAB 1 (s.e.) | 0.916 (0.030) | 1.286 (0.039) | 1.423 (0.082) | 2.054 (0.089) |
| μBA 1 (s.e.) | 0.868 (0.025) | 1.195 (0.042) | 1.251 (0.059) | 1.882 (0.085) |
| 95% c.i. for difference in means | (−0.031, 0.126) | (−0.024, 0.205) | (−0.022, 0.381) | (−0.073, 0.417) |
| t0.05,92 value 2 | 1.205 | 1.56 | 1.76 | 1.393 |
| t-critical value | 1.986 | 1.986 | 1.986 | 1.986 |
| p-Value (α = 0.05) 3 | 0.231 | 0.121 | 0.10 | 0.167 |
| F0.05,46,46 value 4 | 1.362 | 1.18 | 1.76 | 1.081 |
| F-critical value | 1.796 | 1.796 | 1.796 | 1.796 |
| F-probability | 0.30 | 0.60 | 0.10 | 0.80 |
| VSP Mode | Kw/ton 2 | Mean Modal Emission Rates (g/s) | |||
|---|---|---|---|---|---|
| CO2 | CO | NOx, | HC | ||
| 1 | VSP < −2 | 0.21 | 0.00003 | 0.0013 | 0.00014 |
| 2 | −2 ≤ VSP < 0 | 0.61 | 0.00007 | 0.0026 | 0.00011 |
| 3 | 0 ≤ VSP < 1 | 0.73 | 0.00014 | 0.0034 | 0.00011 |
| 4 | 1 ≤ VSP < 4 | 1.50 | 0.00025 | 0.0061 | 0.00017 |
| 5 | 4 ≤ VSP < 7 | 2.34 | 0.00029 | 0.0094 | 0.00020 |
| 6 | 7 ≤ VSP < 10 | 3.29 | 0.00069 | 0.0125 | 0.00023 |
| 7 | 10 ≤ VSP < 13 | 4.20 | 0.00058 | 0.0155 | 0.00024 |
| 8 | 13 ≤ VSP < 16 | 4.94 | 0.00064 | 0.0178 | 0.00023 |
| 9 | 16 ≤ VSP < 19 | 5.57 | 0.00061 | 0.0213 | 0.00024 |
| 10 | 19 ≤ VSP < 23 | 6.26 | 0.00101 | 0.0325 | 0.00028 |
| 11 | 23 ≤ VSP < 28 | 7.40 | 0.00115 | 0.0558 | 0.00037 |
| 12 | 28 ≤ VSP < 33 | 8.39 | 0.00096 | 0.0743 | 0.00042 |
| 13 | 33 ≤ VSP < 39 | 9.41 | 0.00077 | 0.1042 | 0.00040 |
| 14 | VSP ≥ 39 | 10.48 | 0.00073 | 0.1459 | 0.00042 |
| VSP | μobs 1 (s.e.) | μsim 1 (s.e.) | 95% c.i. for Difference in Means | t(α = 0.05) (d.f) 2 | t-Critical | p-Value (α = 0.05) 3 |
|---|---|---|---|---|---|---|
| Roundabout 1 | ||||||
| obs. vs. default | 1.90 (0.80) | 3.15 (1.48) | (−4.628, 2.135) | 0.73 (55) | 2.004 | 0.46 |
| obs. vs. 85th percentile | 0.98 (0.60) | 1.80 (1.09) | (−3.313, 1.667) | 0.66 (71) | 1.993 | 0.51 |
| obs. vs. 95th percentile | 1.67 (0.77) | 1.96 (1.24) | (−3.228, 2.654) | 0.20 (55) | 2.004 | 0.85 |
| Roundabout 2 | ||||||
| obs. vs. default | 3.52 (3.06) | 5.11 (2.69) | (−9.747, 6.571) | 0.39 (58) | 2.002 | 0.69 |
| obs. vs. 85th percentile | 3.56 (2.36) | 2.54 (1.23) | (−2.340, 8.371) | 1.13 (53) | 2.005 | 0.27 |
| obs. vs. 95th percentile | 3.09 (2.02) | 2.80 (1.30) | (−3.135, 7.366) | 0.39 (64) | 1.997 | 0.43 |
| Roundabout 3 | ||||||
| obs. vs. default | 1.60 (1.75) | 3.31 (2.57) | (−7.969, 4.557) | 0.55 (49) | 2.009 | 0.58 |
| obs. vs. 85th percentile | 1.52 (1.69) | 2.40 (1.47) | (−5.372, 3.621) | 0.39 (57) | 2.002 | 0.69 |
| obs. vs. 95th percentile | 1.14 (1.48) | 1.44 (1.58) | (−4.630, 4.019) | 0.14 (68) | 1.995 | 0.88 |
| Roundabout 4 | ||||||
| obs. vs. default | 1.60 (1.57) | 5.99 (2.66) | (−10.51, 1.942) | 1.39 (46) | 2.014 | 0.17 |
| obs. vs. 85th percentile | 1.75 (1.32) | 0.82 (1.05) | (−4.288, 2.420) | 0.55 (72) | 1.993 | 0.58 |
| obs. vs. 95th percentile | 2.47 (0.85) | 2.32 (1.09) | (−2.607, 2.899) | 0.10 (88) | 1.980 | 0.91 |
| Roundabout 5 | ||||||
| obs. vs. default | 2.08 (1.21) | 3.67 (3.33) | (−8.749, 5.573) | 0.44 (39) | 2.023 | 0.66 |
| obs. vs. 85th percentile | 2.75 (0.79) | 1.73 (0.80) | (−1.220, 3.259) | 0.90 (104) | 1.983 | 0.37 |
| obs. vs. 95th percentile | 2.46 (0.96) | 1.77 (1.71) | (−3.242, 4.606) | 0.35 (68) | 1.995 | 0.73 |
| Roundabout 6 | ||||||
| obs. vs. default | 1.98 (1.21) | 1.09 (1.58) | (−3.089, 4.881) | 0.45 (74) | 1.994 | 0.65 |
| obs. vs. 85th percentile | 2.01 (1.22) | 0.22 (1.22) | (−1.722, 5.294) | 1.01 (74) | 1.992 | 0.31 |
| obs. vs. 95th percentile | 1.86 (1.28) | 0.98 (1.67) | (−3.331, 5.080) | 0.41 (70) | 1.996 | 0.68 |
| Pollutants | μAB 1 (s.e.) | μBA 1 (s.e.) | 95% c.i. for Difference in Means | t(α = 0.05) (d.f) 2 | t-Critical | p-Value (α = 0.05) 3 |
|---|---|---|---|---|---|---|
| CO2 | ||||||
| default (AB) | 66.54 (4.89) | 69.41 (4.17) | (−17.20; 11.46) | 0.45 (10) | 2.228 | 0.66 |
| default (BA) | 76.85 (8.78) | 74.64 (3.87) | (−19.19; 23.60) | 0.23 (7) | 2.364 | 0.82 |
| 85th percentile (AB) | 66.54 (4.89) | 64.27 (6.77) | (−16.36; 20.90) | 0.27 (9) | 2.262 | 0.80 |
| 85th percentile (BA) | 76.85 (8.78) | 65.99 (6.05) | (−12.92; 34.63) | 1.01 (9) | 2.262 | 0.34 |
| 95th percentile (AB) | 66.54 (4.89) | 71.26 (6.66) | (−23.14; 13.70) | 0.57 (9) | 2.262 | 0.60 |
| 95th percentile (BA) | 76.85 (8.78) | 67.80 (5.66) | (−14.24; 32.33) | 0.86 (9) | 2.262 | 0.42 |
| CO | ||||||
| default (AB) | 0.011 (0.001) | 0.012 (0.001) | (−0.005; 0.002) | 0.76 (10) | 2.228 | 0.46 |
| default (BA) | 0.010 (0.001) | 0.011 (0.001) | (−0.003; 0.001) | 0.84 (10) | 2.228 | 0.42 |
| 85th percentile (AB) | 0.011 (0.001) | 0.010 (0.001) | (−0.003, 0.004) | 0.44 (10) | 2.228 | 0.67 |
| 85th percentile (BA) | 0.010 (0.001) | 0.010 (0.001) | (−0.002; 0.003) | 0.36 (10) | 2.228 | 0.73 |
| 95th percentile (AB) | 0.011 (0.001) | 0.012 (0.001) | (−0.004; 0.003) | 0.23 (10) | 2.262 | 0.82 |
| 95th percentile (BA) | 0.010 (0.001) | 0.010 (0.001) | (−0.002; 0.003) | 0.15 (10) | 2.262 | 0.88 |
| NOx | ||||||
| default (AB) | 0.29 (0.03) | 0.41 (0.04) | (−0.247, 0.009) | 2.06 (9) | 2.262 | 0.07 |
| default (BA) | 0.27 (0.04) | 0.38 (0.04) | (−0.233, 0.013) | 1.99 (10) | 2.228 | 0.07 |
| 85th percentile (AB) | 0.29 (0.03) | 0.26 (0.03) | (−0.064, 0.133) | 0.78 (10) | 2.228 | 0.45 |
| 85th percentile (BA) | 0.27 (0.04) | 0.26 (0.03) | (−0.093; 0.114) | 0.22 (9) | 2.262 | 0.83 |
| 95th percentile (AB) | 0.29 (0.03) | 0.28 (0.04) | (−0.108, 0.117) | 0.10 (10) | 2.228 | 0.93 |
| 95th percentile (BA) | 0.27 (0.04) | 0.27 (0.03) | (−0.098; 0.109) | 0.12 (9) | 2.262 | 0.90 |
| HC | ||||||
| default (AB) | 0.007 (0.001) | 0.006 (0.001) | (−0.001; 0.003) | 0.87 (8) | 2.306 | 0.41 |
| default (BA) | 0.006 (0.001) | 0.005 (0.001) | (−0.001, 0.002) | 0.85 (8) | 2.306 | 0.42 |
| 85th percentile (AB) | 0.007 (0.001) | 0.006 (0.001) | (−0.003; 0.003) | 0.27 (10) | 2.228 | 0.80 |
| 85th percentile (BA) | 0.006 (0.001) | 0.007 (0.001) | (−0.002; 0.0006) | 1.23 (10) | 2.228 | 0.25 |
| 95th percentile (AB) | 0.007 (0.001) | 0.006 (0.001) | (−0.002; 0.003) | 0.46 (9) | 2.262 | 0.65 |
| 95th percentile (BA) | 0.006 (0.001) | 0.006 (0.001) | (−0.001; 0.0012) | 0.03 (9) | 2.262 | 0.98 |
| Cross Section | [m] | |
| Radius of the inside roadway, inner edge | R1 | 15.00 |
| Radius of the inside roadway, outer edge | R2 1 | 20.40 |
| Radius of the outside roadway, inner edge | R3 2 | 20.70 |
| Radius of the outside roadway, outer edge | R4 3 | 25.95 |
| Inner or outer edge line offset | 0.45 | |
| Inside lane | 4.35 | |
| Divider inner or outer line offset | 0.20 | |
| Divider | 0.30 | |
| Outside lane | 4.25 | |
| Inside roadway width | 5.50 | |
| Outside roadway width | 5.25 | |
| Shift 1—inside to middle | 5.15 | |
| Shift 2—middle to outside | 4.95 | |
| Bias 1 for R1 (Bias 2 for other radii) | 2.58 (2.48) | |
| Arc centre bias for R1 (Bias 2 for other radii) | 2.60 (2.45) | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Acuto, F.; Coelho, M.C.; Fernandes, P.; Giuffrè, T.; Macioszek, E.; Granà, A. Assessing the Environmental Performances of Urban Roundabouts Using the VSP Methodology and AIMSUN. Energies 2022, 15, 1371. https://doi.org/10.3390/en15041371
Acuto F, Coelho MC, Fernandes P, Giuffrè T, Macioszek E, Granà A. Assessing the Environmental Performances of Urban Roundabouts Using the VSP Methodology and AIMSUN. Energies. 2022; 15(4):1371. https://doi.org/10.3390/en15041371
Chicago/Turabian StyleAcuto, Francesco, Margarida C. Coelho, Paulo Fernandes, Tullio Giuffrè, Elżbieta Macioszek, and Anna Granà. 2022. "Assessing the Environmental Performances of Urban Roundabouts Using the VSP Methodology and AIMSUN" Energies 15, no. 4: 1371. https://doi.org/10.3390/en15041371
APA StyleAcuto, F., Coelho, M. C., Fernandes, P., Giuffrè, T., Macioszek, E., & Granà, A. (2022). Assessing the Environmental Performances of Urban Roundabouts Using the VSP Methodology and AIMSUN. Energies, 15(4), 1371. https://doi.org/10.3390/en15041371