1. Introduction
The carbon-intensive road transport sector faces enormous technological, social, entrepreneurial, and managerial challenges [
1,
2,
3]. Awareness of environmental threats and social pressure are the prerequisites for introducing more and more restrictive regulations on the amount of pollutant emissions [
4,
5,
6].
Member States and the European Union (EU) have been following a path of emission reductions since at least 1997, the Kyoto Protocol, the Doha Amendment of 2012, the Paris Agreement of 2015, and the European Green Deal of 2019, which set out a path for the development of Member State economies in view of an ambitious EU-wide climate target of climate neutrality by 2050, and the vast majority of which is addressed to road transport [
7,
8,
9,
10].
In the Paris Climate Agreement, the EU undertook to reduce greenhouse gas emissions by at least 40% by 2030 in all economic sectors compared to the 1990 levels. However, in the 2020 strategy, complementary to the “European Green Deal”, “Sustainable and Smart Mobility Strategy—putting European transport on track for the future”, the main goal in the field of mobility is a 90% reduction in emissions from all transport by 2050 [
11,
12].
According to the latter document, the entire internal combustion vehicle market is to be subject to stricter emission standards, and the regulations concerning CO
2 emission standards for cars and vans are to be revised. In addition, the road charging system is to be tightened up and made more efficient. A significant change is the possible inclusion of road transport in the European CO
2 emissions trading scheme. The above changes are to motivate road users to increase the number of ecological vehicles, i.e., to promote the development of solutions that are energy-efficient and possibly the least harmful to the environment. European Union authorities want 30 million electric cars on the roads of EU member states by 2030. There are 313 million cars registered in the EU. This means that in 2030, almost every tenth vehicle would be electric. Currently, 1.4 million such vehicles are registered for electricity in the member states. According to a report by the European Automobile Manufacturers’ Association (ACEA), in the third quarter of 2020, the number of petrol cars registered in EU countries fell by 24.3%, diesels by 13.7%, and electric cars increased by 132 % compared to the comparable period in 2019. Demand for diesels and petrol vehicles is decreasing, although petrol cars still account for more than half of the EU market [
13,
14,
15].
When analyzing the environmental performance of vehicles, it is important to look at how they interact with the environment from production, through the time of use, to disposal. It should be noted that the value of eco depends very much on the driver, and their driving habits and technique. Electric cars are locally zero-emission. Where they are used, they emit no fumes and do not pollute the surrounding air. The extent to which an electric car is truly zero-emission is determined by the source of energy used to power the battery. If we are dealing with so-called green energy—coming from renewable sources (e.g., a wind turbine or our own photovoltaic installation), the carbon footprint of an electric vehicle is limited only to the production stage. If this energy comes mainly from coal-fired power plants, you still have to take into account the CO2 emissions from power generation.
CO
2 emissions from passenger transport vary considerably depending on the mode of transport. Passenger cars are the main source of pollution, accounting for 60.7% of all CO
2 emissions from road transport in Europe. It should also be stressed that the dynamics of historical CO
2 emissions from the transport sector in individual EU member states are different. For example, in Poland, between 2005 and 2017, a significant increase in emissions was observed (by 76%), where in the EU, a decrease in emissions of 3% was visible during the same period. In order to analyze the possibilities of reducing emissions in the transport sector, scenarios are created that include carbon-dependent charges included in the purchase price of fuels against the background of ongoing technological progress [
16,
17,
18,
19].
In order to reduce the emission of car exhausts, legal regulations are created, defining upper limits for the content of particular toxic components in exhaust gases [
20,
21].
In the area of the European Union, periodical vehicle technical inspections have been obligatory since 1992 [
22,
23]. Their purpose is to assess the technical condition of the vehicle, on the basis of which it may be admitted to road traffic. Apart from the limit values for the mentioned components of the vehicle exhaust gases, the standards also define the methodology of emission tests in specially adjusted laboratories. During inspection, the functioning of the elements aimed at reducing the harmful impact on the environment is checked, among others. The standards regulate the emission of nitrogen oxides, carbon oxides, hydrocarbons, and particulate matter in cars that drive on the road. Cars currently sold should meet the EURO 6 standard from 2014 [
24,
25,
26]. Exhaust emission standards in force in Europe define different requirements for the engines of passenger cars and vans, as well as trucks and buses. Protection of air cleanliness is a priority of the European Commission, therefore, from time to time, the standards are changed and the limit values given in them are reduced, so as to mobilize the car companies to look for new, better technological solutions that will be a lower burden on the environment [
27,
28,
29,
30]. At the moment, the tightening of regulations concerning the reduction of the emission of toxic compounds in engine exhaust gases, fuel consumption, and the emission of greenhouse gases is the main factor steering the direction of development of motor vehicle designs.
Throughout the European Union, a new type of vehicle is allowed for sale after obtaining an approval certificate. Such a document is issued by the appropriate national authority and proves that the prototype meets all EU requirements concerning safety, environmental protection, and conformity of production [
31,
32]. Emissions are tested both in laboratory conditions (WLTP (World Harmonized Light Vehicle Test Procedure)) and on the road (RDE (Real Driving Emissions)). Laboratory tests, which are conducted according to a standardized and repeatable procedure, enable consumers to compare different car models [
33,
34,
35,
36].
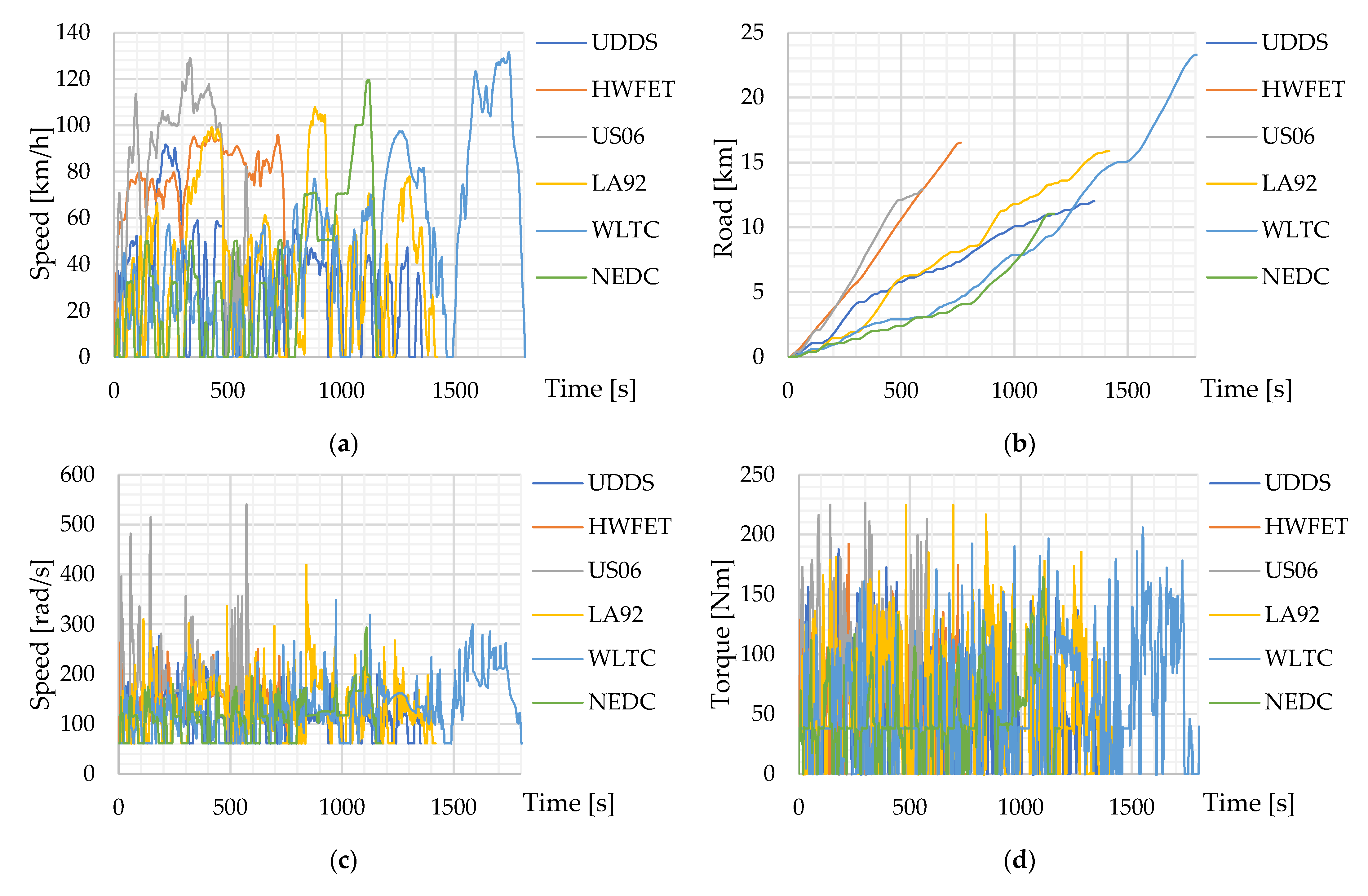
WLTP is a new global harmonized test procedure for light commercial vehicles developed to measure fuel consumption, CO₂, and pollutant emissions for passenger cars and light commercial vehicles. The maximum speed during testing is 131.3 km/h. The average speed is 46.5 km/h and the total cycle time is 30 min. The distance covered during the test is 23.25 km [
37,
38]. The WLTP test consists of four parts, depending on the maximum speed: low (the test lasts 589 s, the car covers 3 km, accelerates to the maximum 56.5 km/h and reaches an average speed of 18.9 km/h), medium (the test lasts 433 s, the car covers 4.7 km, accelerates to 76.6 km/h and reaches an average speed of 39.4 km/h), high (the test lasts 455 s, the car covers 7.2 km, accelerates to 97.4 km/h and reaches an average speed of 56.5 km/h), and very high (the test lasts 323 s, the car covers 8.3 km, accelerates to 131.3 km/h and reaches an average speed of 94 km/h). Individual parts of the cycle simulate urban driving, suburban driving on roads other than urban and motorways. The cycle also does not simulate hill climbs. The procedure also takes into account all optional vehicle accessories affecting aerodynamics, such as rolling resistance or vehicle mass, which have an impact on vehicle-specific CO
2 emissions [
39,
40]. WLTP includes guidelines for new driving cycles ((WLTC) Worldwide harmonized Light-duty vehicles Test Cycles).
The RDE test is not a substitute for laboratory testing, but complements it, especially for NOx emissions. Real-world emission testing involves measuring pollutants using portable emissions measurement systems (PEMS) mounted on cars as they drive on the road. The vehicle is driven on a real road according to randomly selected parameters such as acceleration, deceleration, ambient temperature, and load [
41,
42]. The limits that cannot be exceeded are defined as those obtained from the laboratory test (WLTP), multiplied by the influencing factors. The compliance factors take into account the margin of error of the instrumentation, which is not the same as the level of accuracy and repeatability in the laboratory test.
Until 2017, the New European Driving Cycle (NEDC) test procedure was in force within the European Union. The NEDC included two test phases: the UDC (urban driving cycle) and the EUDC (extra urban driving cycle). For 13 min, the vehicle is tested in what is assumed to be urban conditions, with the remaining 7 min in non-urban conditions. The components of this cycle do not take into account actual driving patterns and distances travelled on different types of roads. The average speed over the NEDC cycle is only 34 km/h and the maximum speed is only 120 km/h. The total distance the vehicle covers in the test is 11 km [
43,
44].
In the United States of America, the FTP-75 (Federal Transient Procedure) test is used to assess the environmental performance of passenger cars and light-duty vehicles, and the Highway Federal Extra Test (HWFET) is used to assess fuel consumption [
45,
46].
The federal test procedure (FTP) consists of the UDDS (Urban Dynamometer Driving Schedule). The Urban Dynamometer Driving Schedule is a mandatory test on a dynamometer of a car’s tailpipe emissions. The cycle consists of two phases. In the first phase, the vehicle covers a distance of 5.78 km at an average speed of 41.2 km/h in 505 s. In the second phase, which takes 864 s, the vehicle covers a distance of 6.29 km. The maximum speed reached by the vehicle during the test is 91.2 km/h [
47,
48].
The FTP-75 cycle consists of four phases. During the whole cycle, the car covers a distance of 17.77 km, in 1877 s, at an average speed of 34.12 km/h (maximum speed of 91.25 km/h). Additionally, cars must be tested under two supplemental federal test procedures ((SFTP) Supplemental Federal Test Procedures): aggressive driving (SFTP US06) and the optional air conditioning test (SFTP SC03) [
49,
50,
51,
52].
The Highway Fuel Economy Test (HWFET) is used to determine the highway fuel economy rating. During the cycle, which takes 765 s, the car covers a distance of 16.45 km, with an average speed of 77.7 km/h [
53,
54].
In addition, there is the standardized LA92 cycle, which, compared to FTP, has a higher maximum and average speed, shorter idle time, fewer stops, and a higher maximum acceleration rate. LA-92 is designed for Class 3 heavy-duty vehicles [
55,
56].
One of the most popular fuels in the world is petrol. Raw petrol has a low resistance to pre-ignition, so it is enriched with special compounds that decrease the “knocking” effect. In a controlled way, fuel with different octane numbers can be obtained, which is tailored to the needs of specific engines and does not cause damage to them [
57,
58].
LPG (liquefied petroleum gas) is an alternative power source for internal combustion engines. This fuel is a mixture of liquefied propane and butane. Due to climatic differences, the proportions of the components can vary [
59,
60].
Compressed natural gas (CNG) is a gas compressed to 20–25 MPa, consisting of approximately 97% methane. CNG is distinguished by its high octane number (130) and has the highest efficiency among liquid fuels [
61,
62].
For many years, intensive research has been carried out in the direction of alternative fuels. Considering the engine being powered by different fuels, the same energy conversion efficiency must be assumed. With this assumption, it is possible to calculate the mass of a given fuel, the combustion of which yields energy equal to the energy obtained from burning 1 kg of gasoline, and then to calculate the carbon dioxide emissions, also with respect to the emissions produced by burning 1 kg of gasoline.
The question of biofuels’ influence on the reduction of CO
2 emission is complicated and requires taking into consideration, apart from the chemical composition, many factors connected with the type of construction and the specificity of the engine operation. It has been claimed in the literature that methane is the only commonly used engine fuel that results in a significant reduction of carbon dioxide emissions compared to gasoline engine fueling [
63].
A separate issue is the use of plant-based fuels to power engines. These are mainly alcohols used to power spark ignition engines and various types of vegetable oils or their esters used to power compression ignition engines. Using them in pure form (alcohols) or mixed with gasoline (E85 fuel) results in higher carbon dioxide emissions than using gasoline. A similar effect occurs when compression ignition engines are fueled with vegetable oils.
For example, methyl and ethyl alcohols are used as engine fuels. They are used in pure form or as additives and as a raw material to produce MTBE (methyl tert-butyl ether) and ETBE (ethyl tert-butyl ether). The biggest disadvantage of ethanol is its low calorific value. In relation to a liter, this value is 1/2 lower than in the case of petrol (petrol in accordance with PN-EN228 42.3–43.5 MJ/kg; ethanol 26.8 MJ/kg). The cetane number of ethanol is 8. The properties of methanol are similar to ethanol, but it has an even lower calorific value (20.1 MJ/kg) and is a strong poison [
64,
65,
66,
67].
An alternative fuel for powering motor vehicles that is the subject of much research is dimethyl ether (DME) [
68,
69]. This fuel can be produced from many sources such as natural gas, coal, and biomass. DME is characterized by a very high cetane number. The physicochemical properties of DME are similar to LPG.
Dedicated tools for performing computer simulation analysis of the amount of pollutants emitted from motor vehicles have been in the works for many years.
An example of such a tool is VECTO (Vehicle Energy Consumption Calculation Tool) [
70,
71]. A simulation tool is used to calculate the amount of fuel consumed and the carbon dioxide emitted by new trucks.
The tool to run a simulation showing what results a given vehicle with WLTP testing would achieve in the NEDC test was CO2MPAS (CO
2 Model for Passenger and commercial vehicles Simulation) [
72,
73].
A literature review finds tools for analyzing bus fleet emissions in an urban area [
74].
There is a lack of tools, developed in an open source environment, that can be adapted to the operational parameters of a large set of vehicles that represent a given car market.
The aim of the study was to build a computer tool for modelling selected driving tests, fuel and biofuel consumption, and CO2 emissivity analysis. The developed tool, using tests on a chassis dynamometer and unit fuel consumption and the resistance of working elements, is dedicated to vehicles with spark-ignition engines. In order to achieve the aim of the study, the OpenModelica environment was used.
4. Discussion
The developed computer tool can enable the construction of road traffic simulators. The development of the proposed solution was based on the OpenModelica open source software and the methodology used to build quantitative models of fuel consumption and CO2 emissions of the selected vehicle as a function of engine load and vehicle speed.
The proposed simulation tool can be tailored to the operating parameters of a large set of vehicles representing a given automotive market and consequently lead to more accurate traffic emissions values than the adopted environmental estimates.
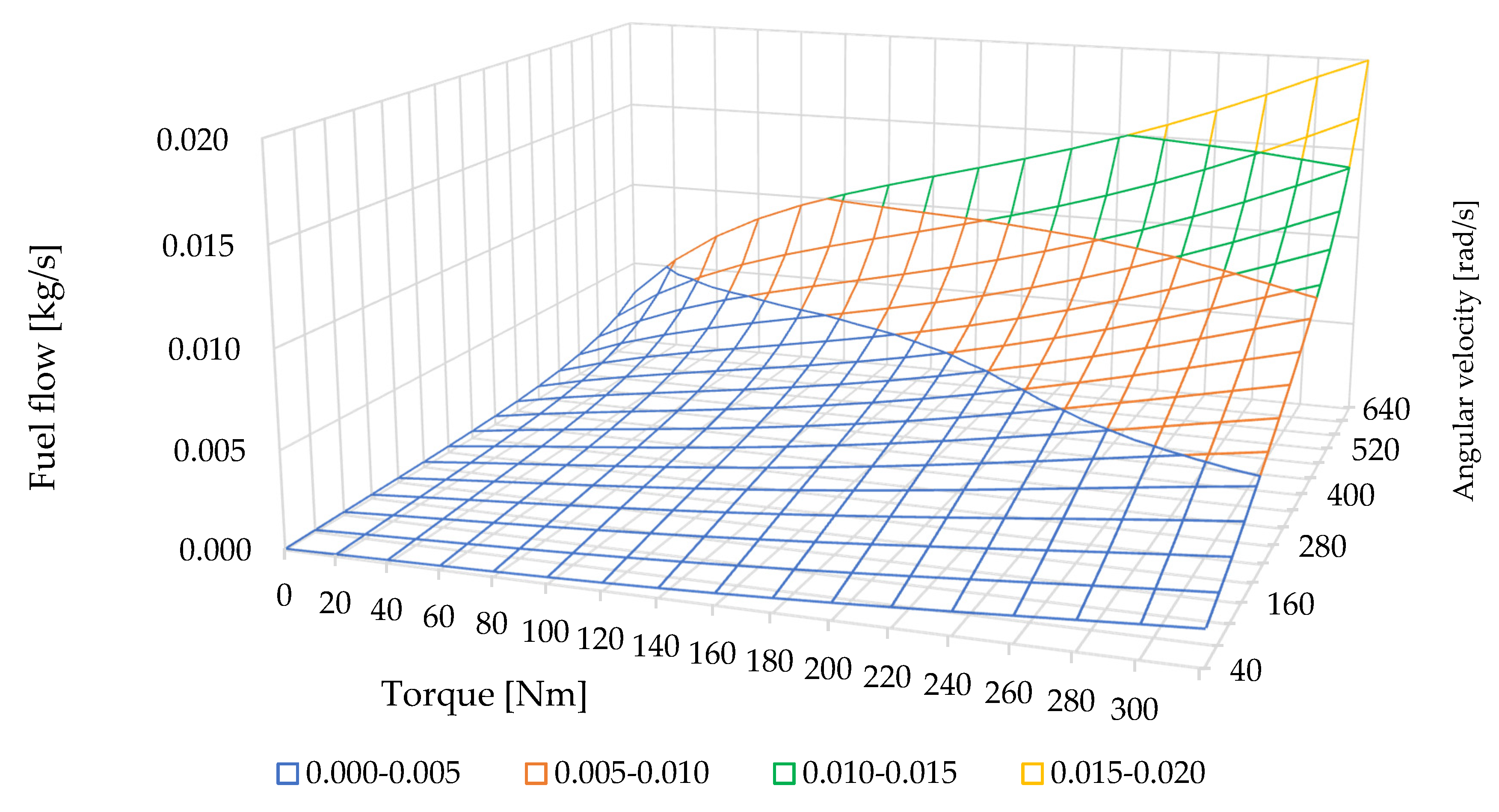
The calculation of instantaneous fuel mass demand uses the EPA’s published BTE characteristics for petrol 95. In the simulation model, it is assumed that for a certain point on the BTE characteristic (torque produced by the engine and engine operating speed), the algorithm calculates the required value of the instantaneous fuel flux based on its calorific value in such a way to provide the required energy demand. The efficiency of converting the energy contained in the fuel into mechanical work at a design point is the same for all fuels. No precise information was found in the literature on how changing the fuel mass affects the instantaneous efficiency of the engine at a given operating point.
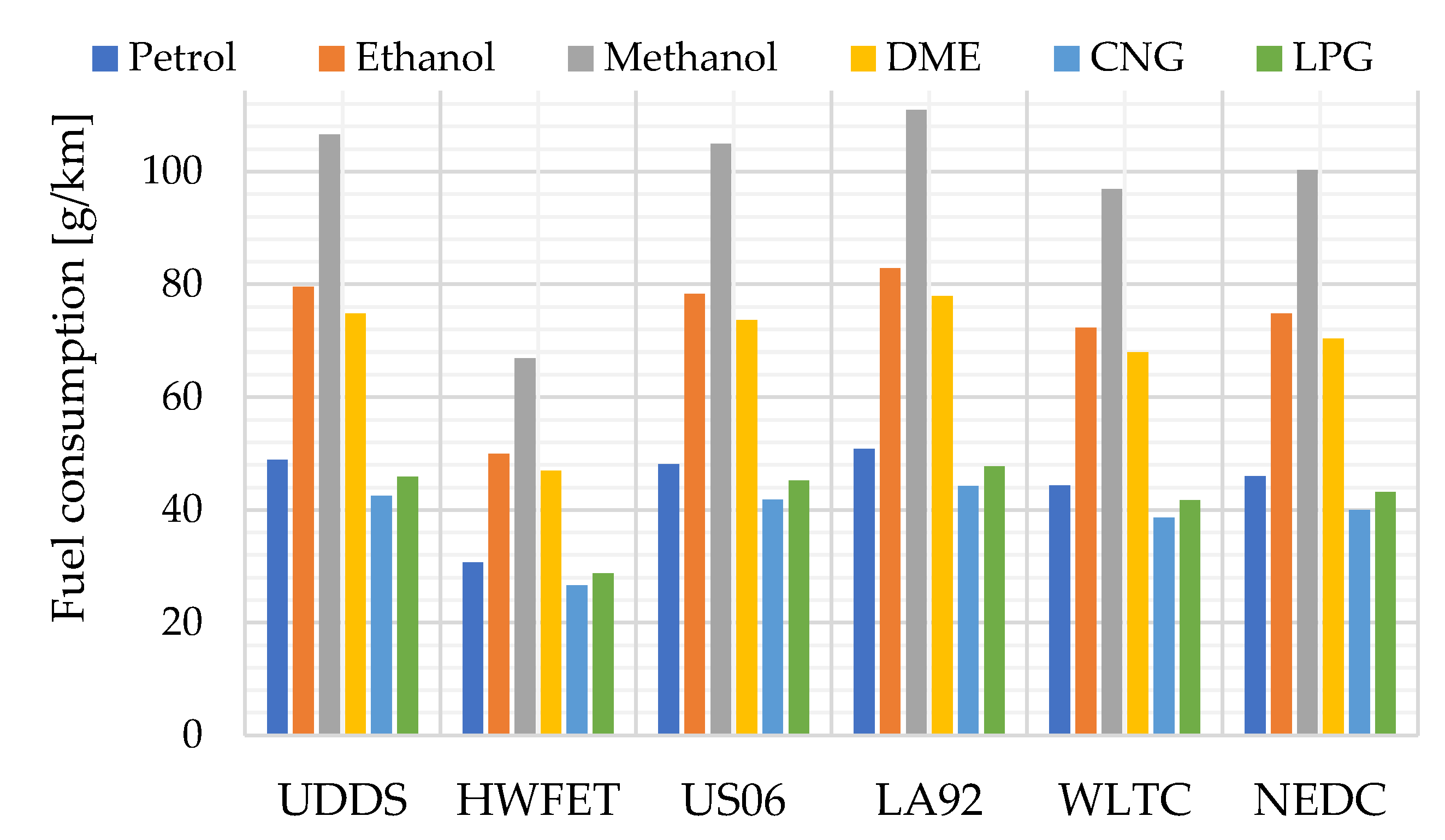
Figure 13 presents the results of the final consumption of tested fuels per one kilometer of travelled road for selected road tests. For petrol 95, the minimum value was obtained at the level of 30.64 g/km for the HWFET driving test, while the maximum value was obtained for LA92 (110.99 g/km) for methanol.
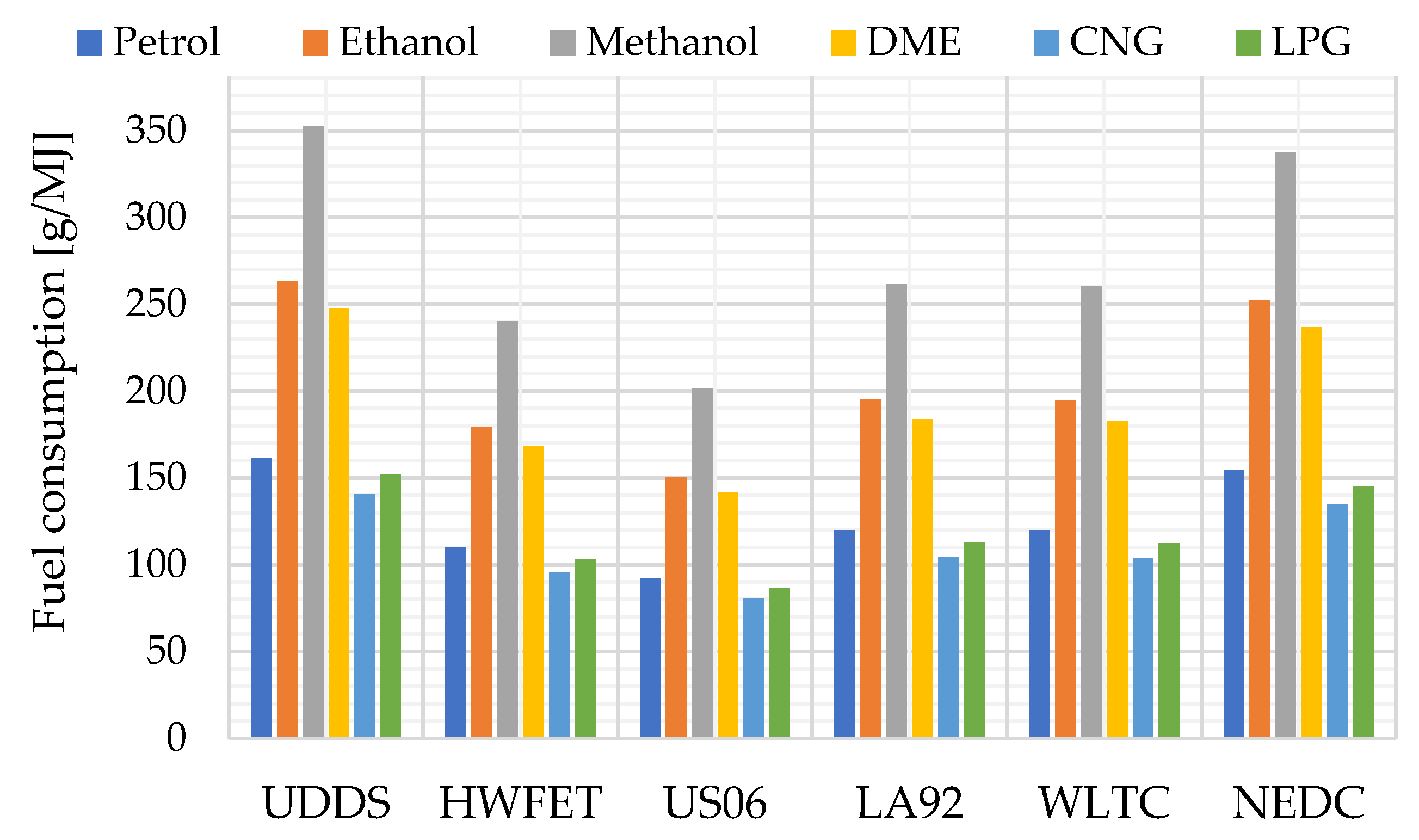
Figure 14 presents results of the simulator operation for the fuels under consideration and the driving tests in the form of the parameter of the final consumption of the tested fuels per 1 MJ of travelled road in the executed test. For CNG, the minimum value was achieved at the level of 80.4 g/MJ for the US 06 driving test, while the maximum value was obtained for methanol in the UDDS test (352.5 g/MJ).
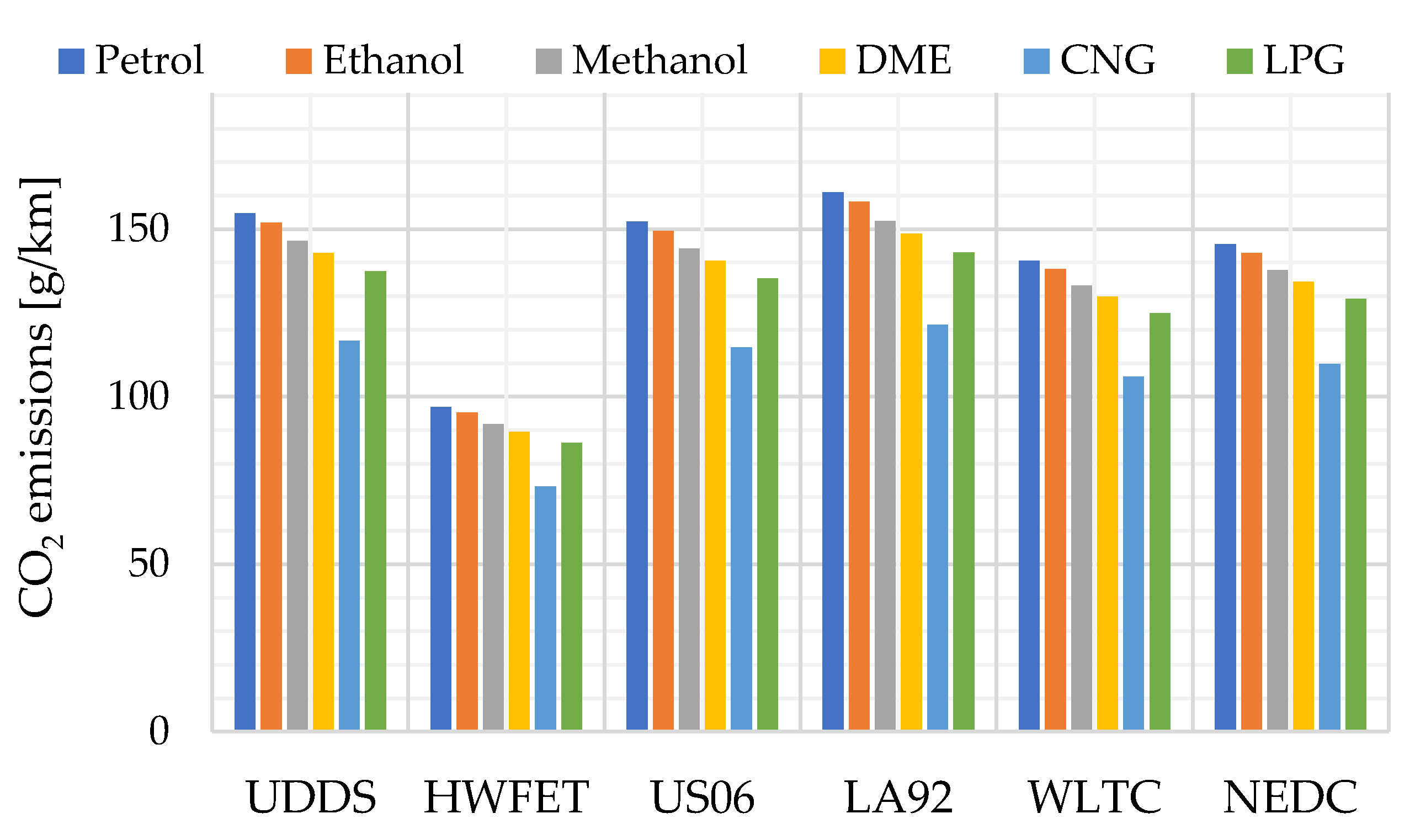
Below, in
Figure 15, the data obtained from the simulations of driving tests with biofuels in the form of the parameter of the final CO
2 emission per kilometer travelled are summarized. For CNG, the minimum value was achieved at level of 97.7 g/km for the HWFET driving test, while the maximum value was obtained for LA92 (162.1 g/km).
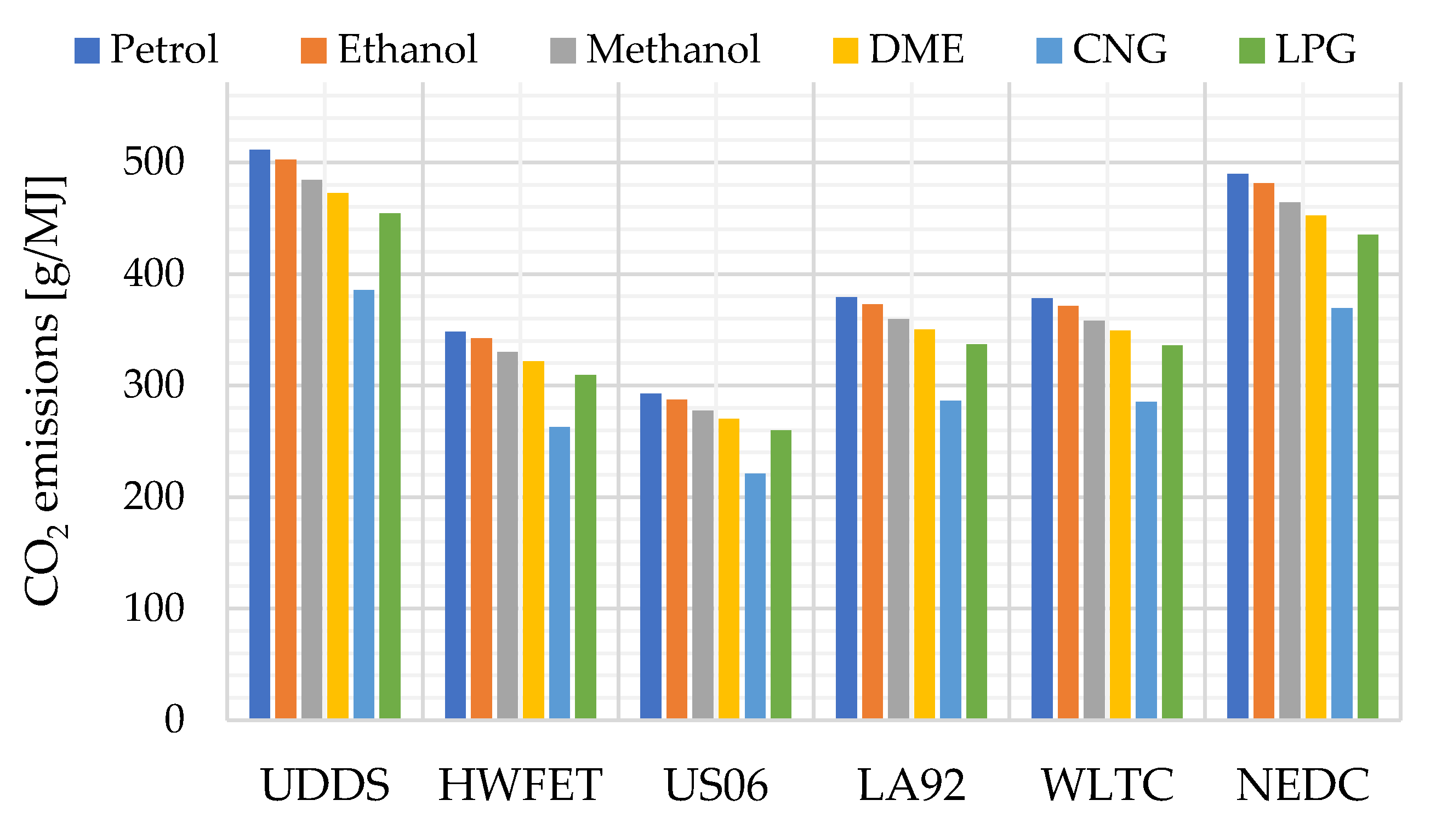
Figure 16 summarizes the simulator results for the considered fuels and driving tests in the form of the parameter of final CO
2 emission per 1 MJ. For petrol, the minimum value was achieved at the level of 338.7 g/MJ for the US 06 driving test, while the maximum value was obtained for UDDS (591.8 g/MJ).
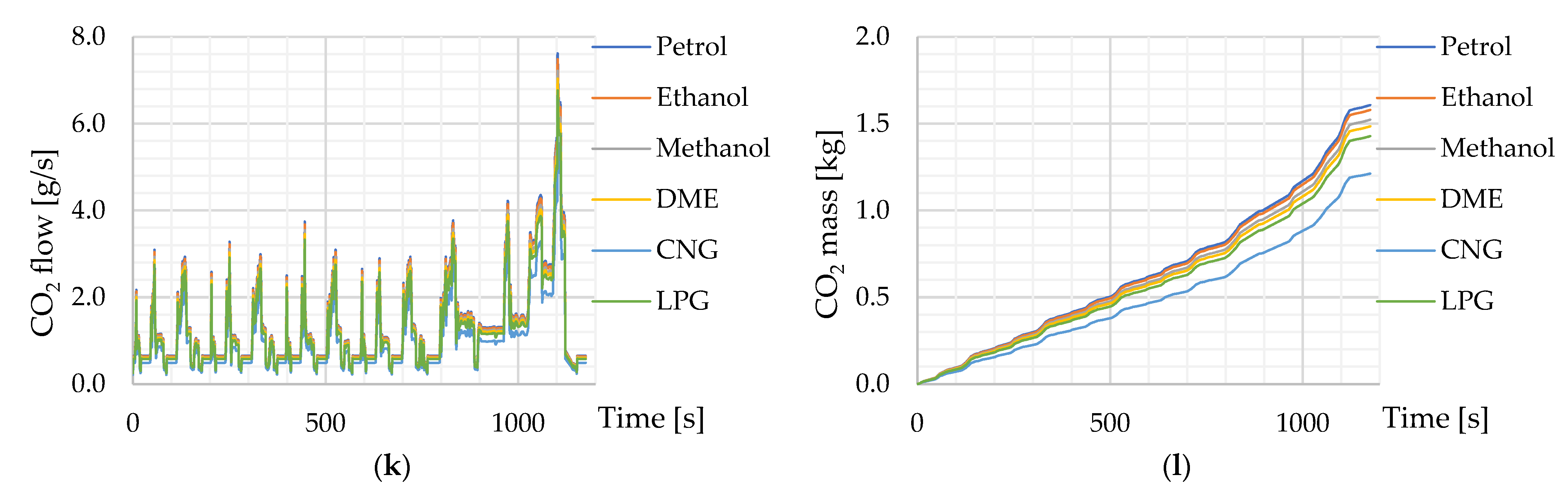
In the developed simulation model of CO
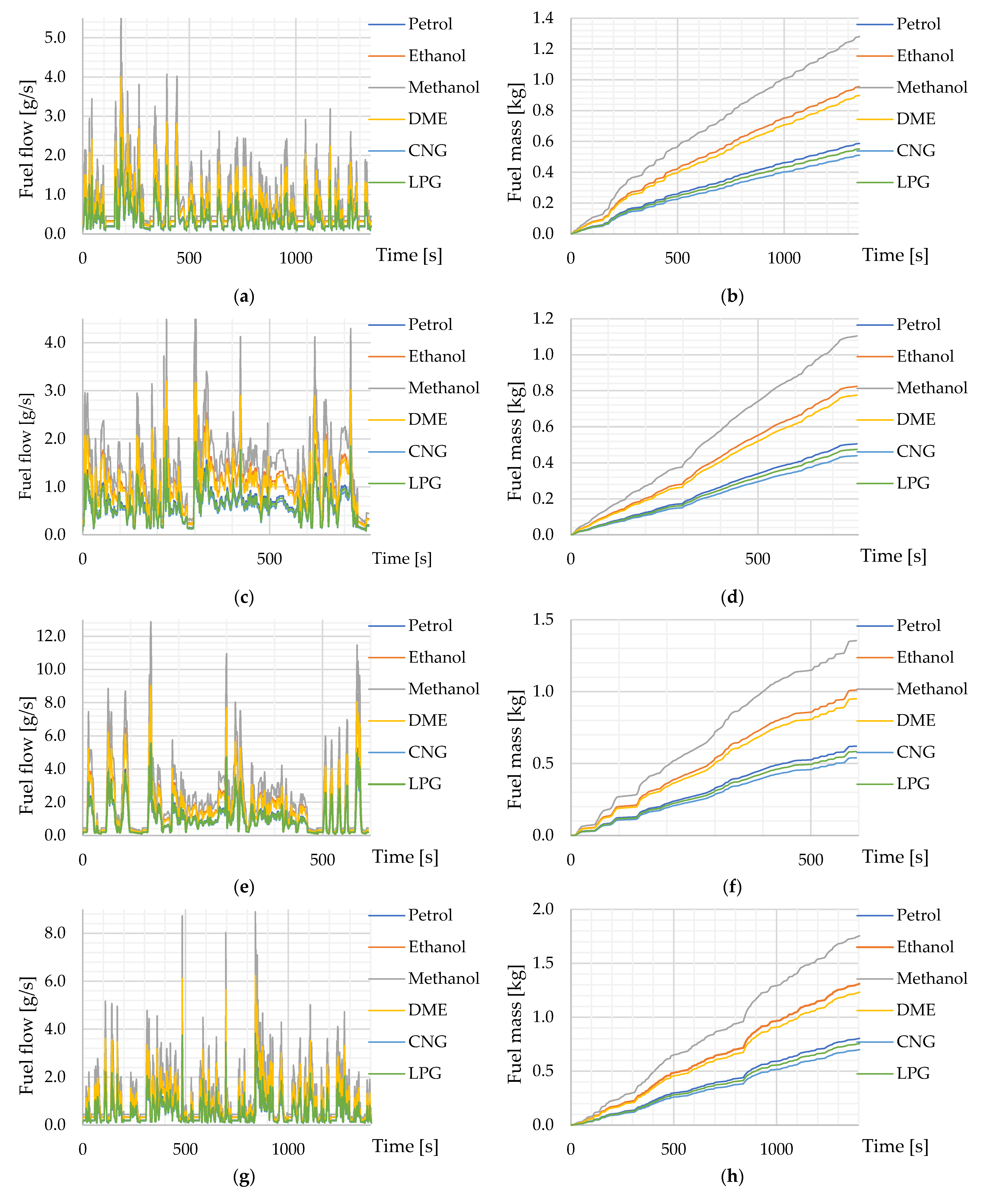
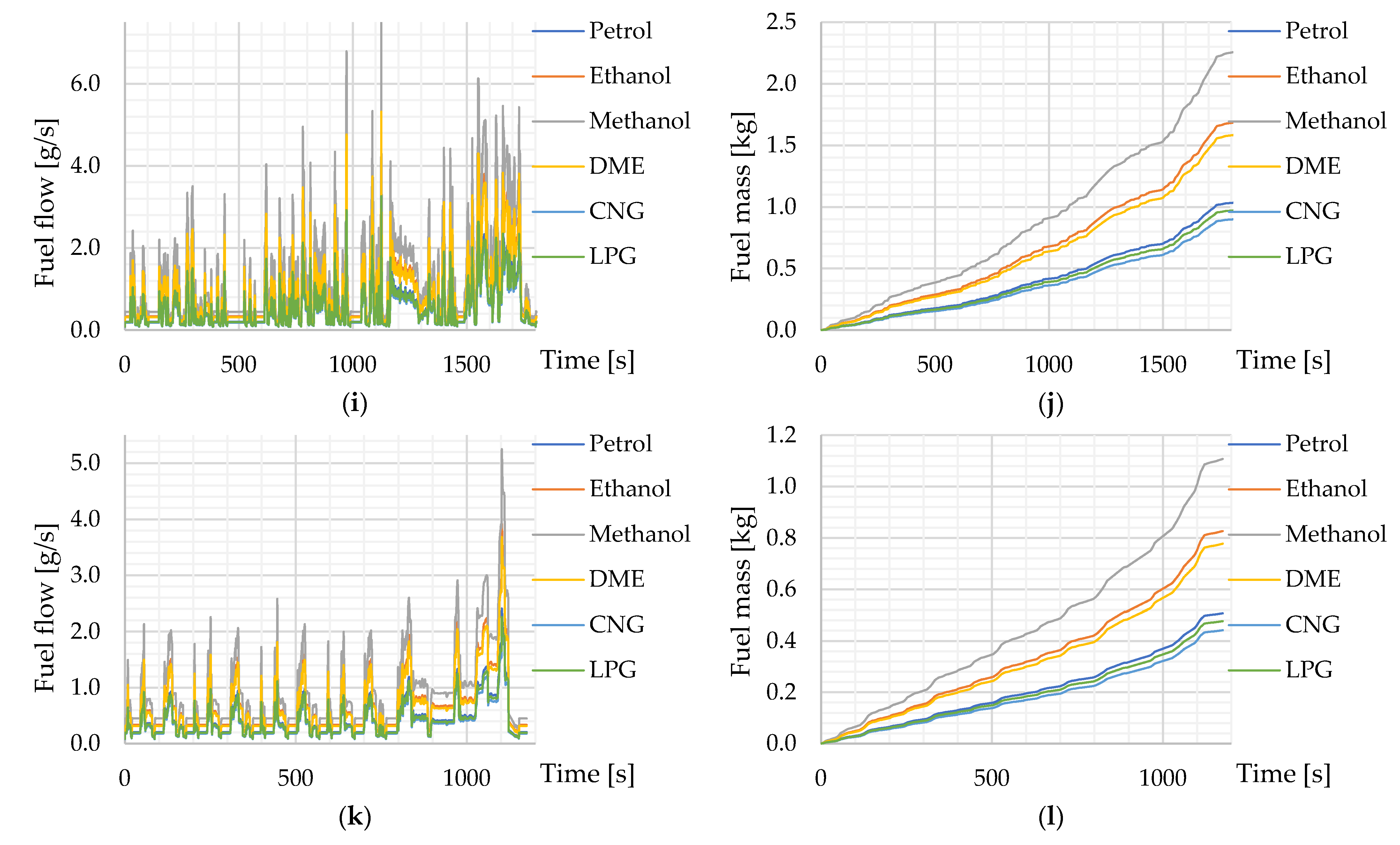
2 emissions in road tests, the BFC (specific fuel consumption) published by EPA data was based on engine testing for this engine model powered by petrol 95. In the further procedure, the BFC characteristics (EPA) were converted into fuel flux (kg/s), the values of which are presented in
Figure 9, and were used in the simulation for the driving tests for fuel petrol 95. Then, for fuels other than gasoline 95 during the simulation operation, it was assumed that at a given instantaneous operation point of the engine (instantaneous torque on the crankshaft produced by the engine and the instantaneous value of the angular velocity of the crankshaft), an instantaneous energy flux of the value should be provided equal to fueling the engine with 95 petrol. The values of the consumption streams for fuels other than 95 gasoline have been computed on the basis of dependence (11). Big differences in the mass consumption of different fuels result from the large differences in the calorific value considered fuels (minimum methanol 19.93 MJ/kg, maximum CNG 50.0 MJ/kg).
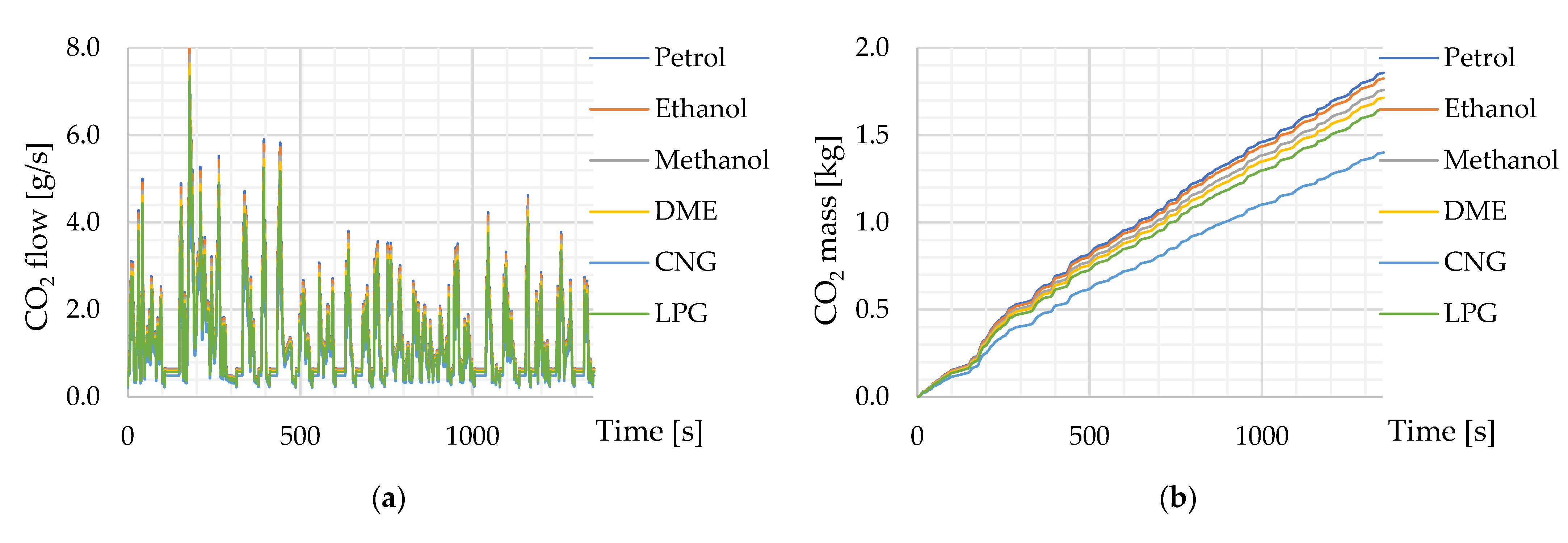
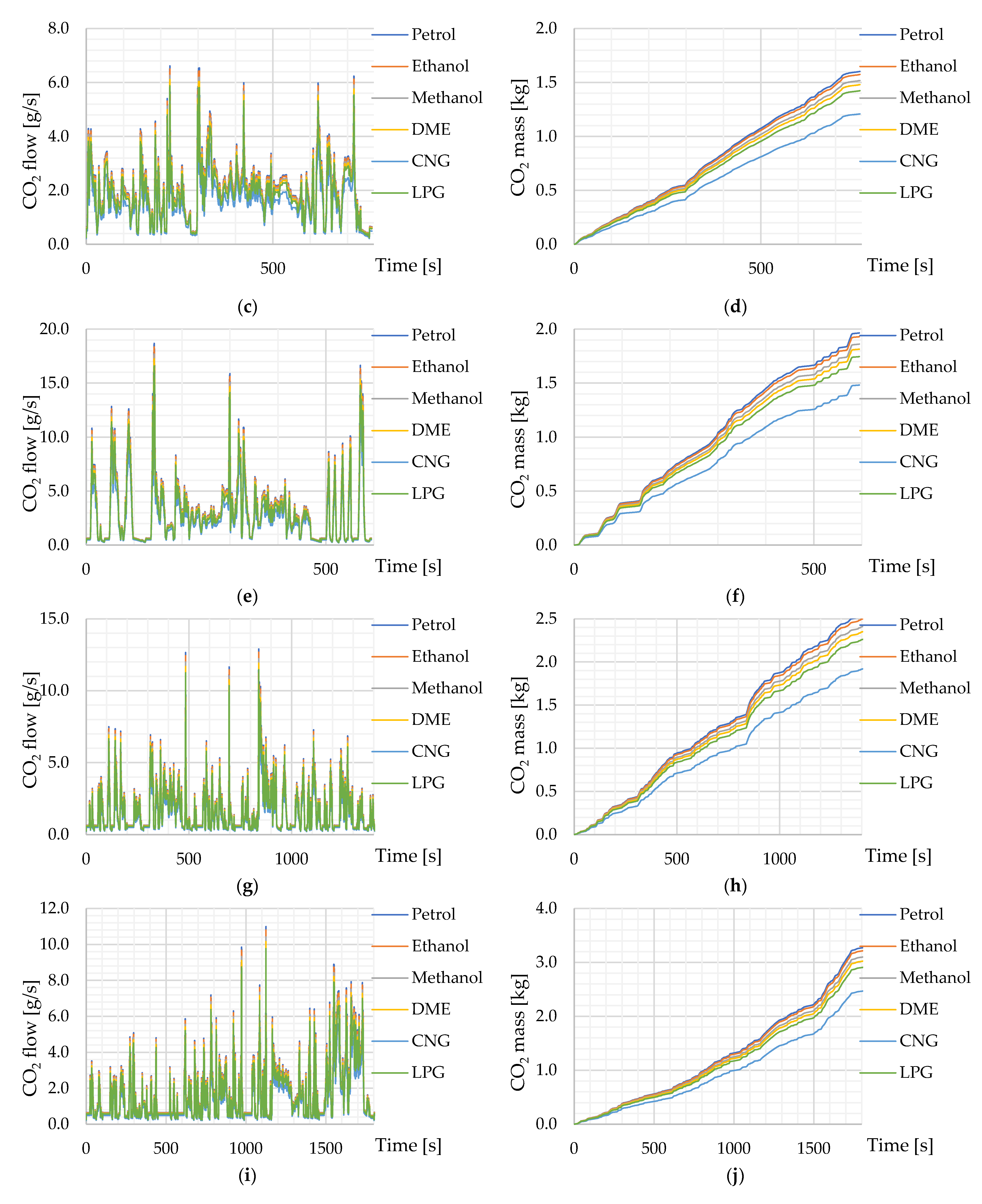
In the subsequent steps of the simulation basing on the mass fluxes obtained for the considered fuels, the CO
2 emissions were calculated. The final values of the CO
2 emission obtained from the simulation are shown in
Figure 15. In turn, CO
2 emissions per kilometer of distance traveled by the vehicle showed much smaller differences. They confirmed the correctness of the calculations used in the developed simulation model.


 ,
, 
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}