
An Analytical Method for Calculating the Cogging Torque of a Consequent Pole Hybrid Excitation Synchronous Machine Based on Spatial 3D Field Simplification


Abstract
:1. Introduction
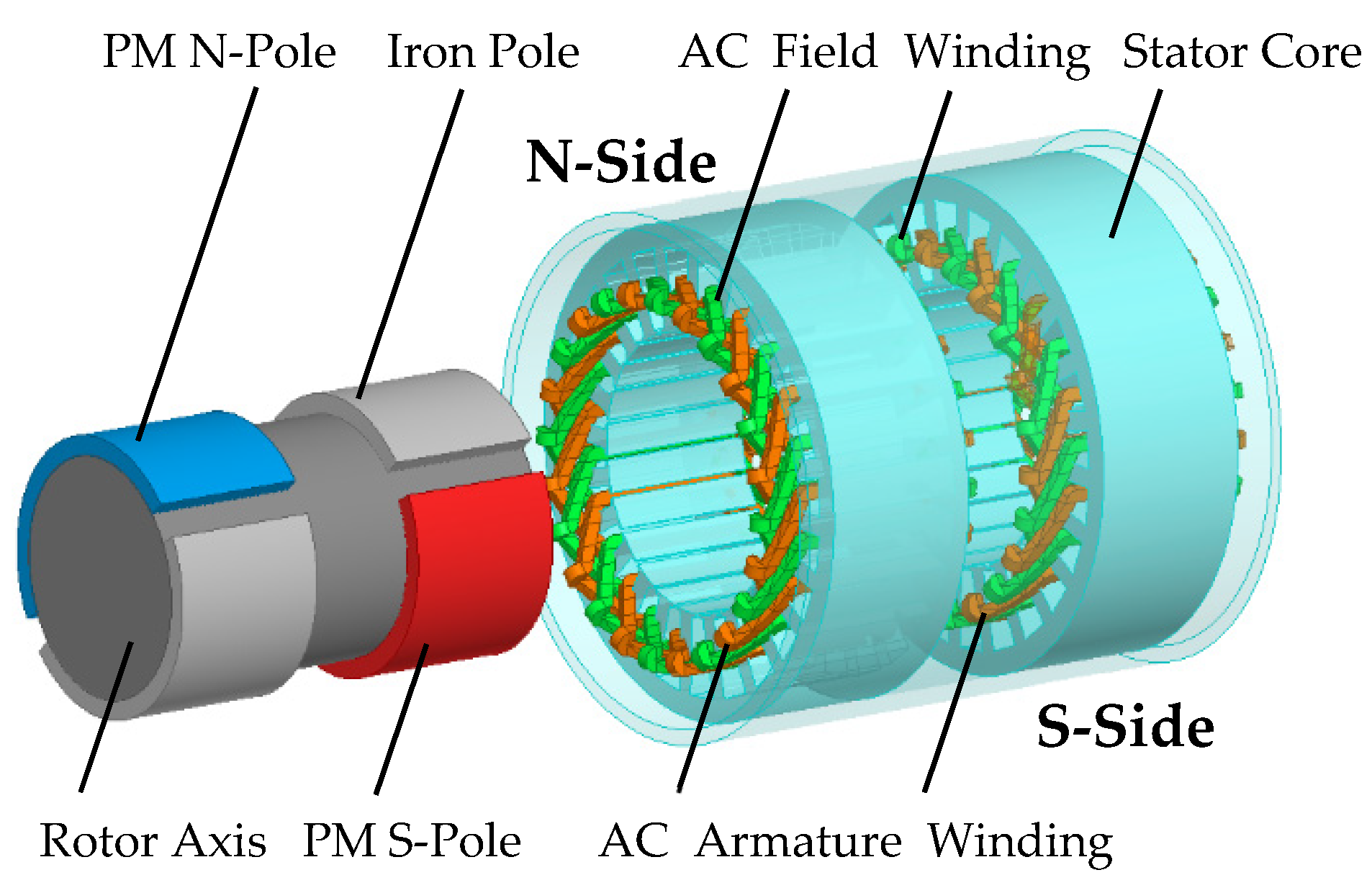
2. The Structure and Principle of a CPHES Machine
3. Analytical Model of Cogging Torque in CPHES Machine
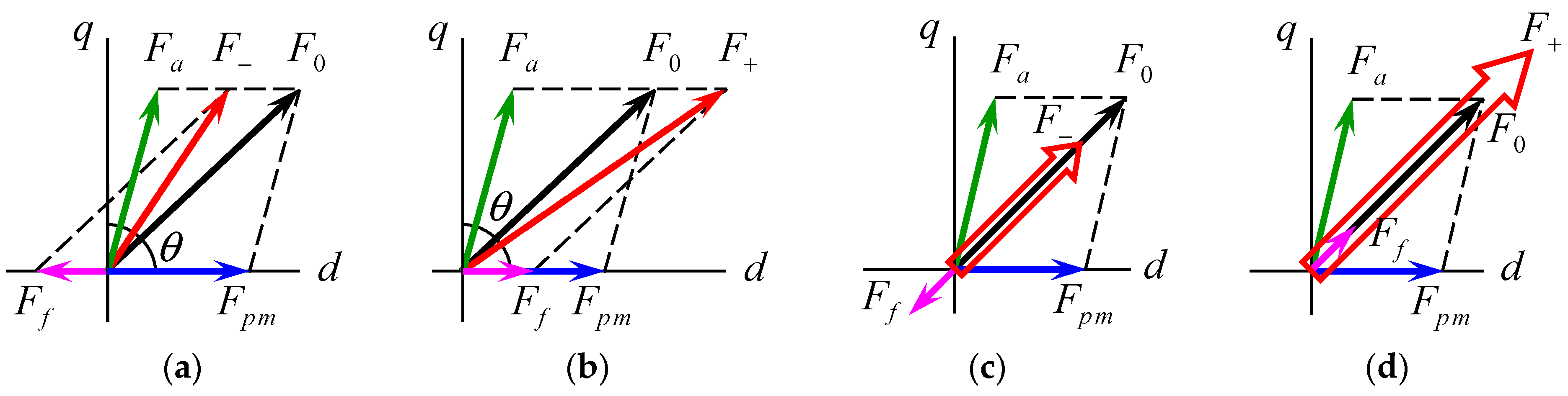
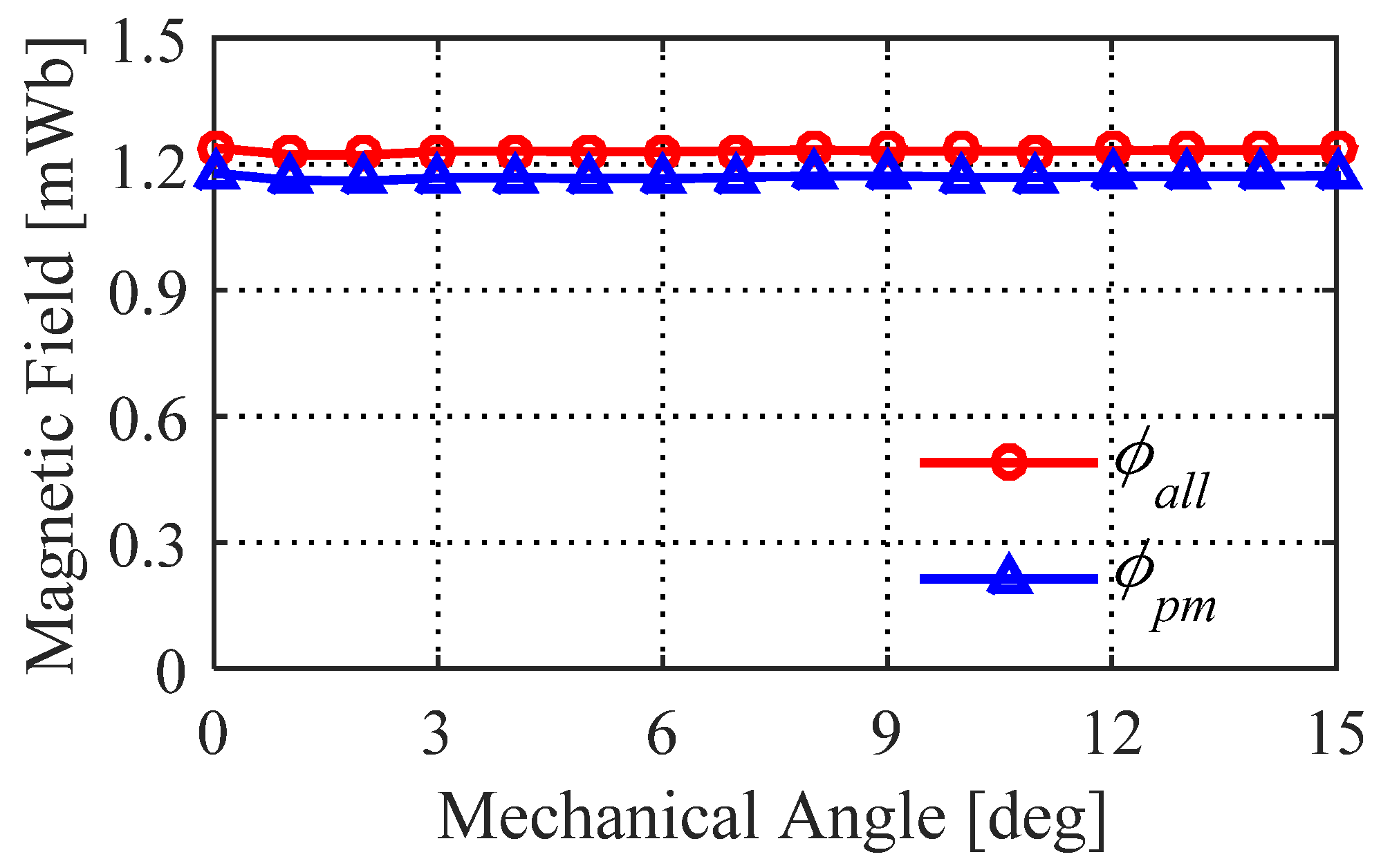
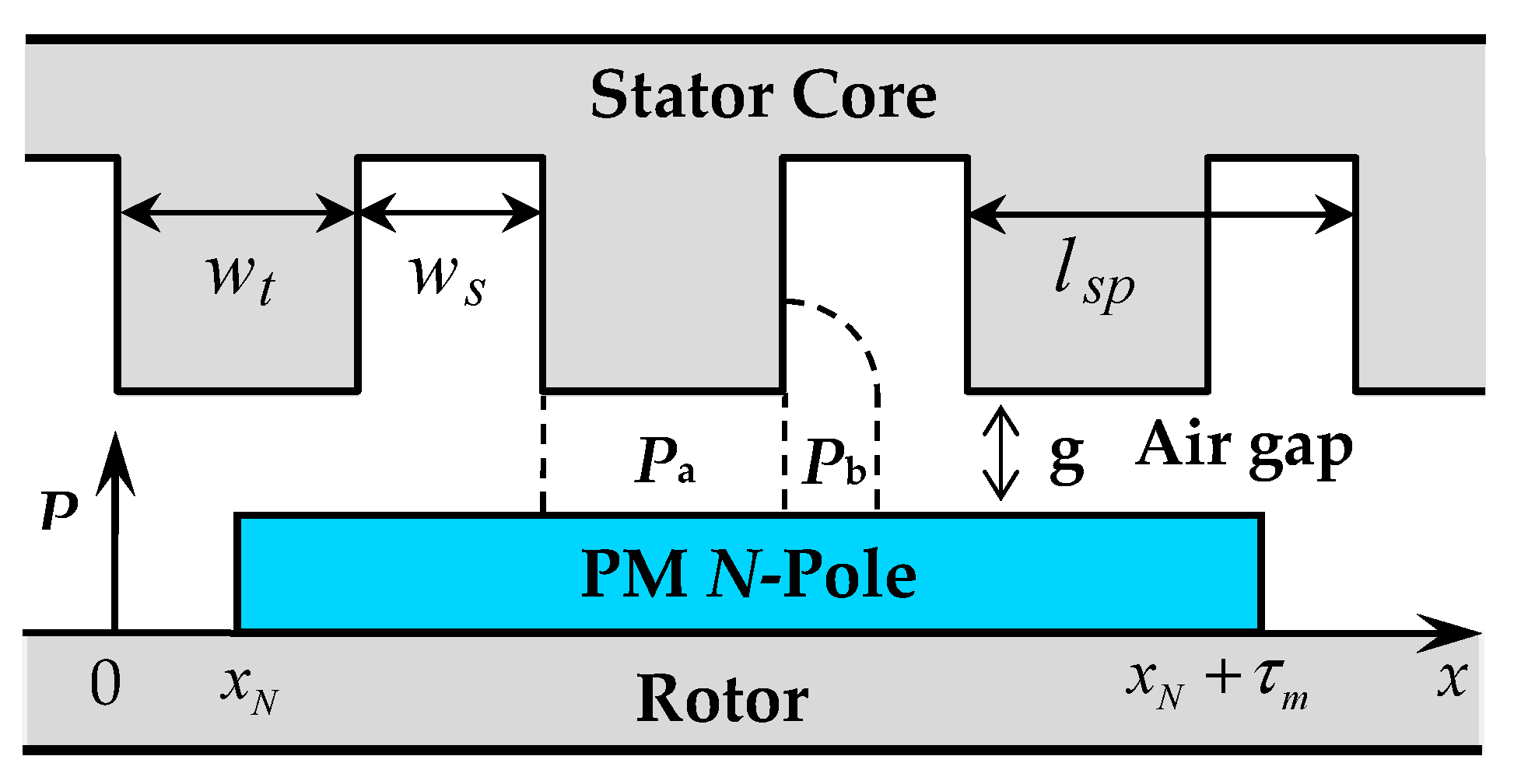
3.1. Simplification of 3D Field
3.2. Two-Dimensional Analysis Model
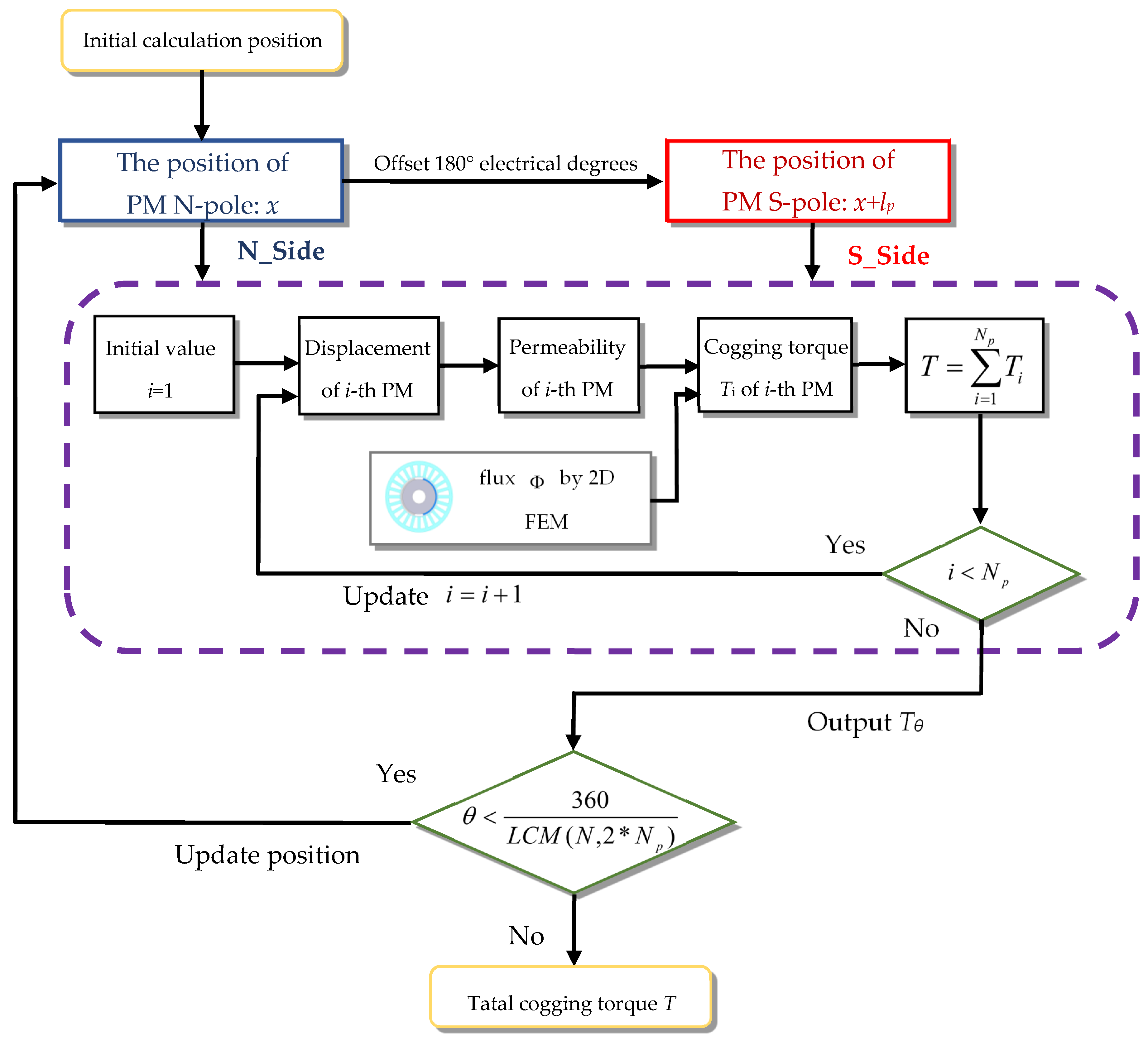
3.3. Calculation Process
4. Verification
4.1. Dimensional Parameters
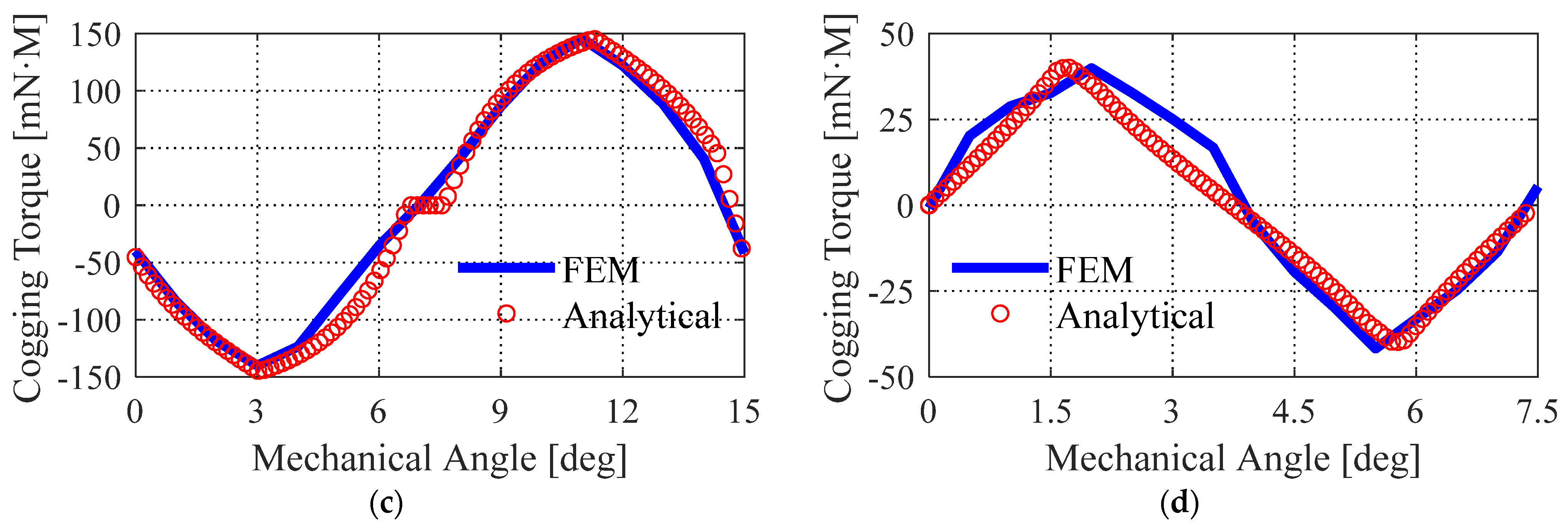
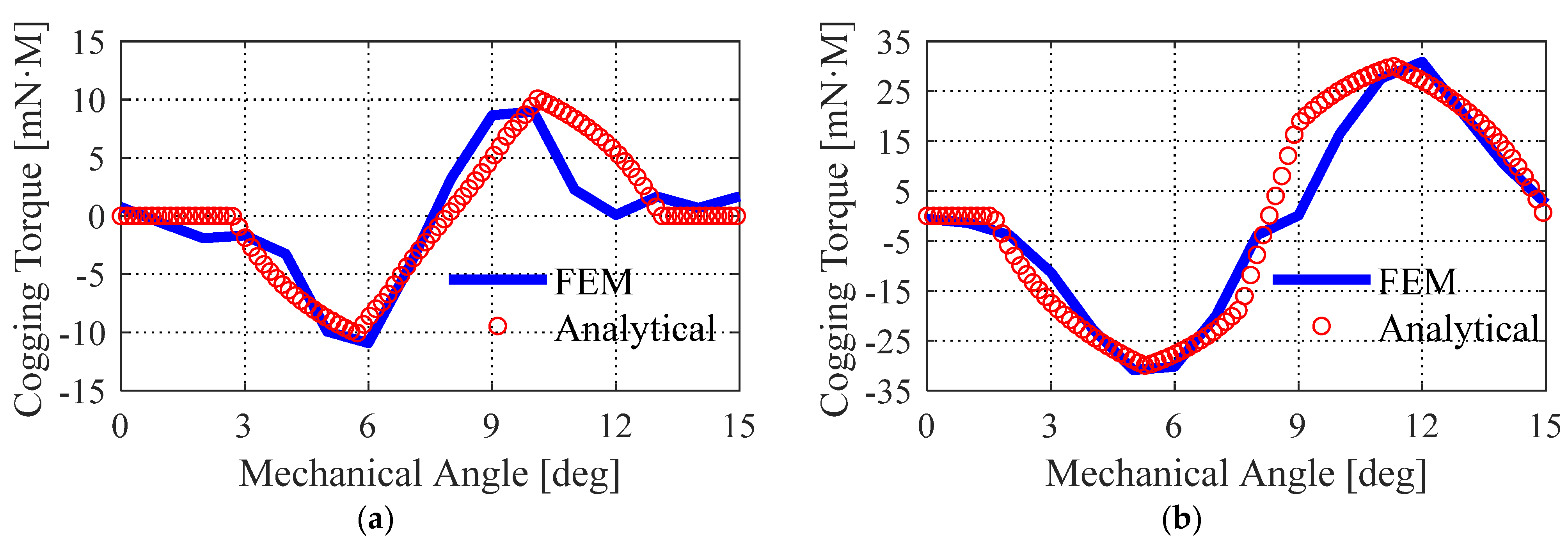
4.2. Comparison of Calculation Results
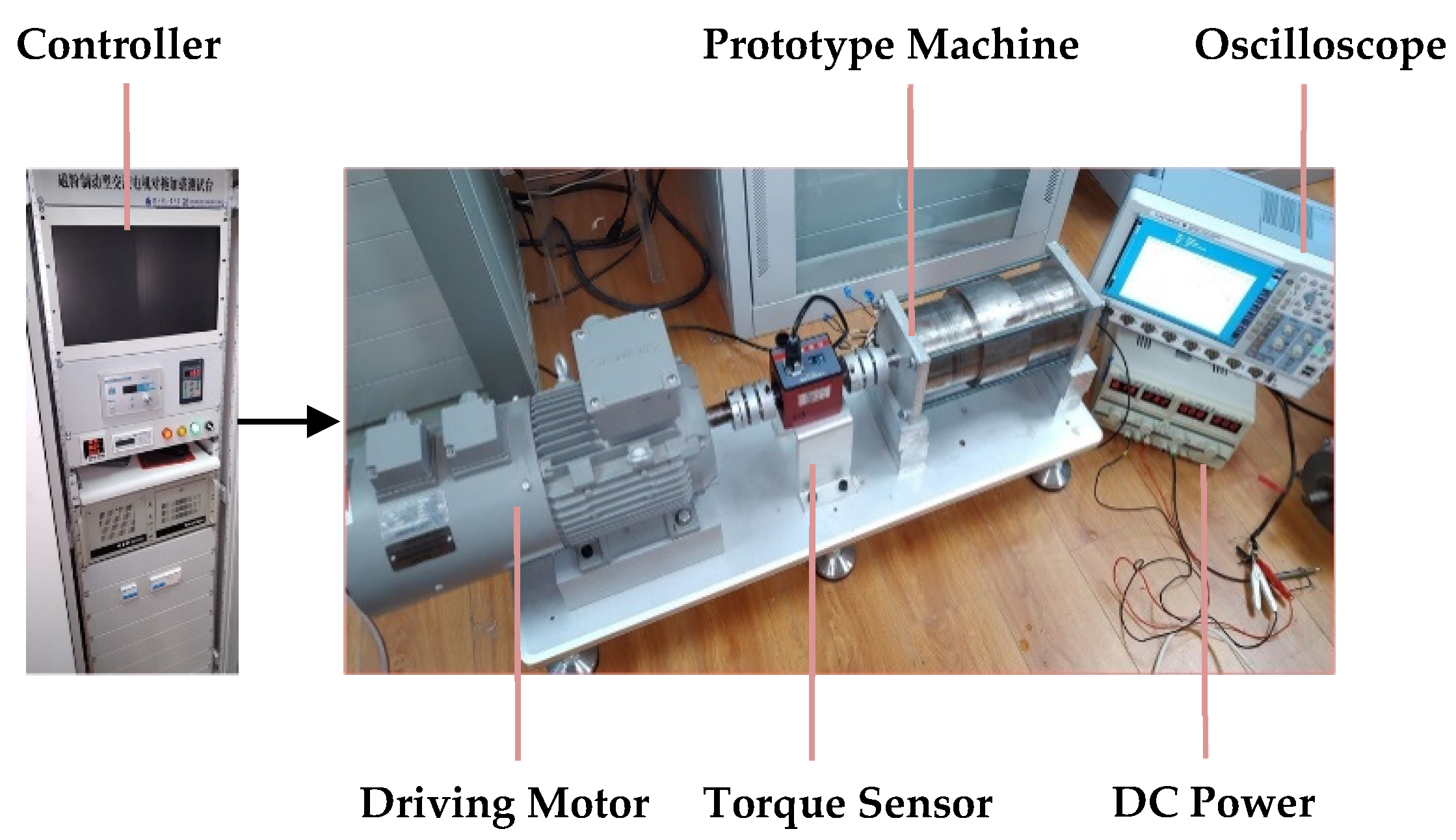
4.3. Experimental Verification
5. Discussion
6. Conclusions and Further Research
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, J.; Yin, J. An Analytical Method of Calculating Back-EMF in Dual Consequent Hybrid Excitation Synchronous Machine. Chin. J. Electr. Eng. 2018, 4, 52–59. [Google Scholar]
- Wu, J.; Yin, J.; Zhuang, B.; Wang, M.; Zhang, J. Equivalent Magnetic Circuit Model for Consequent Pole Hybrid Excitation Synchronous Machine with AC Field Control. J. Magn. 2019, 24, 791–798. [Google Scholar] [CrossRef]
- Zhao, H.; Liu, C.; Song, Z.; Yu, J. Analytical Modeling and Comparison of Two Consequent-Pole Magnetic-Geared Machines for Hybrid Electric Vehicles. Energies 2019, 12, 1888. [Google Scholar] [CrossRef] [Green Version]
- Palomo, R.E.Q.; Gwozdziewicz, M. Effect of Demagnetization on a Consequent Pole IPM Synchronous Generator. Energies 2020, 13, 6371. [Google Scholar] [CrossRef]
- Zhou, M.; Zhang, X.X.; Zhao, W.X.; Ji, J.H.; Hu, J.N. Influence of Magnet Shape on the Cogging Torque of a Surface-mounted Permanent Magnet Motor. Chin. J. Electr. Eng. 2019, 5, 40–50. [Google Scholar] [CrossRef]
- Wang, K.; Gao, P.W.; Zhu, S.S.; Liu, C.; Jiang, R. Investigation of Cogging Torque and Torque Ripple in Consequent Pole Permanent Magnet. Proc. CSEE 2021. (In Chinese) [Google Scholar] [CrossRef]
- Fan, S. Research on Hybrid Permanent Magnet Field Modulation Motor. Ph.D. Thesis, Southeast University, Nanjing, China, 2019. [Google Scholar]
- Bernardeschi, C.; Dini, P.; Domenici, A.; Saponara, S. Co-simulation and Verification of a Non-linear Control System for Cogging Torque Reduction in Brushless Motors. In Proceedings of the International Conference on Software Engineering and Formal Methods, Oslo, Norway, 16–20 September 2019; Springer: Cham, Switzerland, 2019; Volume 12226, pp. 3–19. [Google Scholar]
- Dini, P.; Saponara, S. Design of an Observer-Based Architecture and Non-Linear Control Algorithm for Cogging Torque Reduction in Synchronous Motors. Energies 2020, 13, 2077. [Google Scholar] [CrossRef]
- Bu, F.; Yang, Z.; Gao, Y.; Pan, Z.; Pu, T.; Degano, M.; Gerada, C. Speed Ripple Reduction of Direct-Drive PMSM Servo System at Low-Speed Operation Using Virtual Cogging Torque Control Method. IEEE Trans. Ind. Electron. 2021, 68, 160–174. [Google Scholar] [CrossRef]
- Yang, Y.; Bianchi, N.; Bramerdorfer, G.; Zhang, C.; Zhang, S. Methods to Improve the Cogging Torque Robustness Under Manufacturing Tolerances for the Permanent Magnet Synchronous Machine. IEEE Trans. Energy Convers. 2021, 36, 2152–2162. [Google Scholar] [CrossRef]
- Simón-Sempere, V.; Simón-Gómez, A.; Burgos-Payán, M.; Cerquides-Bueno, J.-R. Optimisation of Magnet Shape for Cogging Torque Reduction in Axial-Flux Permanent-Magnet Motors. IEEE Trans. Energy Convers. 2021, 36, 2825–2838. [Google Scholar] [CrossRef]
- Li, Z.; Yu, X.; Wang, X.; Xing, X. Optimization and Analysis of Cogging Torque of Permanent Magnet Spherical Motor. IEEE Trans. Appl. Supercond. 2021, 31, 1–5. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Taylor, R.L.; Nithiarasu, P.; Zhu, J.Z. The Finite Element Method; Bathe and McGraw-Hill: London, UK, 2008. [Google Scholar]
- Tsukerman, I. Computational Electromagnetics: A Miscellany. J 2021, 4, 881–896. [Google Scholar] [CrossRef]
- Gajewski, M.D.; Miecznikowski, M. Assessment of the Suitability of Elastomeric Bearings Modeling Using the Hyperelasticity and the Finite Element Method. Materials 2021, 14, 7665. [Google Scholar] [CrossRef] [PubMed]
- Belytschko, T.; Liu, W.K.; Moran, B.; Elkhodary, K.B. Nonlinear Finite Elements for Continua and Structures, 2nd ed.; Wiley: Newark, NJ, USA, 2013; pp. 21–63. [Google Scholar]
- Demenko, A.; Sykulski, J.K. Analogies between Finite-Difference and Finite-Element Methods for Scalar and Vector Potential Formulations in Magnetic Field Calculations. IEEE Trans. Magn. 2016, 52, 1–6. [Google Scholar] [CrossRef]
- Nguyen-Thoi, T.; Liu, G.R.; Lam, K.Y.; Zhang, G.Y. A face-based smoothed finite element method (FS-FEM) for 3D linear and geometrically non-linear solid mechanics problems using 4-node tetrahedral elements. Int. J. Numer. Methods Eng. 2009, 78, 324–353. [Google Scholar] [CrossRef]
- Jin, J.M. Theory and Computation of Electromagnetic Fields, 1st ed.; Wiley-IEEE Press: Newark, NJ, USA, 2011; pp. 297–330. [Google Scholar]
- Atia, K.S.R.; Heikal, A.M.; Obayya, S.S.A. Matrix-Free Time Domain Gradient Smoothing Method with Stretched-Coordinates Perfectly Matched Layer for Analysis of Photonic Devices. J. Lightw. Technol. 2020, 38, 5791–5800. [Google Scholar] [CrossRef]
- Zeng, W.; Liu, G.R. Smoothed Finite Element Methods (S-FEM): An Overview and Recent Developments. Arch. Comput. Methods Eng. 2016, 25, 397–435. [Google Scholar] [CrossRef]
- Wan, D.; Hu, D.; Yang, G.; Long, T. A fully smoothed finite element method for analysis of axisymmetric problems. Eng. Anal. Bound. Elem. 2016, 72, 78–88. [Google Scholar] [CrossRef]
- Jin, J.M. The Finite Element Method in Electromagnetics, 3rd ed.; Wiley: Newark, NJ, USA, 2015; pp. 19–40. [Google Scholar]
- Marechal, Y.; Ramdane, B.; Botelho, D.P. Computational Performances of Natural Element and Finite Element Methods. IEEE Trans. Magn. 2014, 50, 405–408. [Google Scholar] [CrossRef]
- Ming, T.W.Z.; Zhou, M. Adaptive Finite Element Analysis in the Application of Electromagnetic Mechanics. In Proceedings of the Eighth International Conference on Computational Intelligence and Security, Guangzhou, China, 17–18 November 2012; pp. 687–689. [Google Scholar]
- Xu, W.; Wang, G.; Duan, N.; Wang, S.; Guo, Y.; Zhu, J. Extended Finite-Element Method for Weak Discontinuities in Electric Fields. IEEE Trans. Appl. Supercond. 2016, 26, 1–5. [Google Scholar] [CrossRef]
- Wang, G.; Wang, S.; Duan, N.; Huangfu, Y.; Zhang, H.; Xu, W.; Qiu, J. Extended Finite-Element Method for Electric Field Analysis of Insulating Plate with Crack. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Outer diameter of stator core [mm] | 61 | Stator core length [mm] | 85 |
| Stator core inner diameter [mm] | 34.5 | Rotor core outer diameter [mm] | 30 |
| Stator yoke thickness [mm] | 4 | Rotor core inner diameter [mm] | 12 |
| Stator tooth width [mm] | 4.606 | Rotor yoke thickness [mm] | 18 |
| Air gap length [mm] | 2 | Axial length of yoke [mm] | 290 |
| PM thickness [mm] | 2.5 | Axial length of rotor shaft [mm] | 60 |
| Pole-arc coefficient | 0.85 | Axial length of rotor [mm] | 85 |
| Axial length of PM [mm] | 85 | Axial length of iron pole [mm] | 85 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Zhang, M.; Yin, J.; Wu, J.; Yang, C. An Analytical Method for Calculating the Cogging Torque of a Consequent Pole Hybrid Excitation Synchronous Machine Based on Spatial 3D Field Simplification. Energies 2022, 15, 878. https://doi.org/10.3390/en15030878
Zhang Z, Zhang M, Yin J, Wu J, Yang C. An Analytical Method for Calculating the Cogging Torque of a Consequent Pole Hybrid Excitation Synchronous Machine Based on Spatial 3D Field Simplification. Energies. 2022; 15(3):878. https://doi.org/10.3390/en15030878
Chicago/Turabian StyleZhang, Zhiyan, Ming Zhang, Jing Yin, Jie Wu, and Cunxiang Yang. 2022. "An Analytical Method for Calculating the Cogging Torque of a Consequent Pole Hybrid Excitation Synchronous Machine Based on Spatial 3D Field Simplification" Energies 15, no. 3: 878. https://doi.org/10.3390/en15030878
APA StyleZhang, Z., Zhang, M., Yin, J., Wu, J., & Yang, C. (2022). An Analytical Method for Calculating the Cogging Torque of a Consequent Pole Hybrid Excitation Synchronous Machine Based on Spatial 3D Field Simplification. Energies, 15(3), 878. https://doi.org/10.3390/en15030878