
Dimensionality Reduction Method of Dynamic Programming under Hourly Scale and Its Application in Optimal Scheduling of Reservoir Flood Control



Abstract
:1. Introduction
2. Reservoir Flood Control Scheduling Model
2.1. Reservoir Optimal Scheduling Model
2.1.1. Objective Function
Maximum Peak Clipping Criterion
Maximum Flood Control Safety Guarantee Criterion
2.1.2. Constraint Conditions
2.2. Reservoir Conventional Scheduling Model
2.2.1. Conventional Scheduling Rules
2.2.2. Application of Conventional Flood Control Scheduling Rules
3. Model Solution and Dimensionality Reduction of Dynamic Programming Based on the Hourly Scale
3.1. The Idea of Model Solving Based on Dynamic Programming
3.2. Dimensionality Reduction Processing of DP Based on Changing Retracting Space
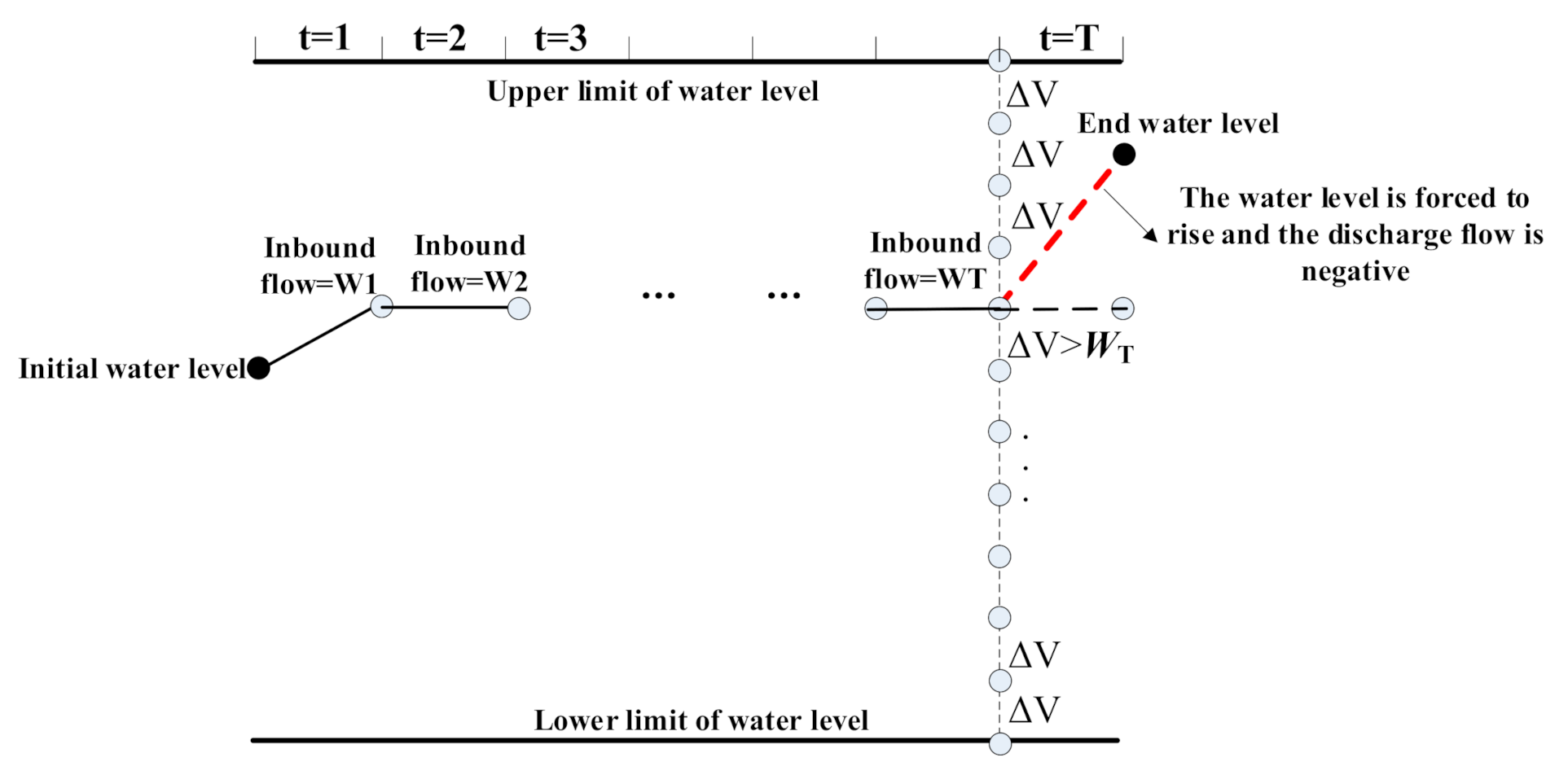
3.3. Reason Analysis and Processing of Negative Value of Drainage Flow in DP Calculation
3.4. Overall Scheme of Algorithm Implementation
4. Case Study
4.1. Overview of Dongjiang Reservoir Project
4.2. Conventional Scheduling Rules of Dongjiang Reservoir
- (1)
- In a five-year flood, The peak flow is 3730 m3/s, the five-day flood volume is 569 million m3, the starting water level is 284 m, the discharge flow does not exceed 1500 m3/s, and the maximum water level of the reservoir does not exceed 285 m.
- (2)
- In a twenty-year flood, the peak flow is 5850 m3/s, the five-day flood volume is 900 million m3, the starting water level is 284 m, the discharge flow does not exceed 3500 m3/s, and the maximum water level of the reservoir does not exceed 285.40 m.
- (3)
- In a hundred-year flood, the peak flow is 10,100 m3/s, the five-day flood volume is 1.34 billion m3, the starting water level is 284 m, the discharge flow does not exceed 3500 m3/s, and the maximum water level of the reservoir does not exceed 286.65 m.
- (4)
- In a thousand-year flood, the peak flow is 15,300 m3/s, the five-day flood volume is 19.4 billion m3, the starting water level is 284 m, the discharge flow does not exceed 3500 m3/s. When the water level of the reservoir is less than 286.65 m, the discharge flow does not exceed 3500 m3/s. After the water level exceeds 286.65 m, the control discharge flow does not exceed 4090 m3/s, and the maximum control water level of the reservoir does not exceed 288.88 m.
- (5)
- In a ten thousand-year flood, the peak flow is 20,600 m3/s, the five-day flood volume is 25.4 billion m3, and the starting water level is 284 m. When the water level of the reservoir is below 286.65 m, the control discharge flow does not exceed 3500 m3/s. When the water level does not reach 288.88 m, the control discharge flow does not exceed 4090 m3/s. When the water level exceeds 288.88 m and the inbound flow of the reservoir exceeds the thousand-year flood, the water level of the reservoir does not exceed 291.92 m, and the maximum discharge flow can reach 4130 m3/s.
4.3. Input Data
- (1)
- From the technical scheme recorded in the literature by the Hunan Power Grid Corporation of China (2015), it can be seen that the flood control limit water level is 284 m, which is also the starting water level of the reservoir. As such, during the scheduling, the starting water levels of the two floods are 284 m. The water level at the end of the scheduling period is set to be consistent with the initial water level.
- (2)
- The designed flood level of Dongjiang Reservoir is 288.88 m and the dead water level is 242 m. Therefore, the lower limit of the water level in the DP calculation is set to 242 m, and the upper limit of the water level is 288.88 m.
- (3)
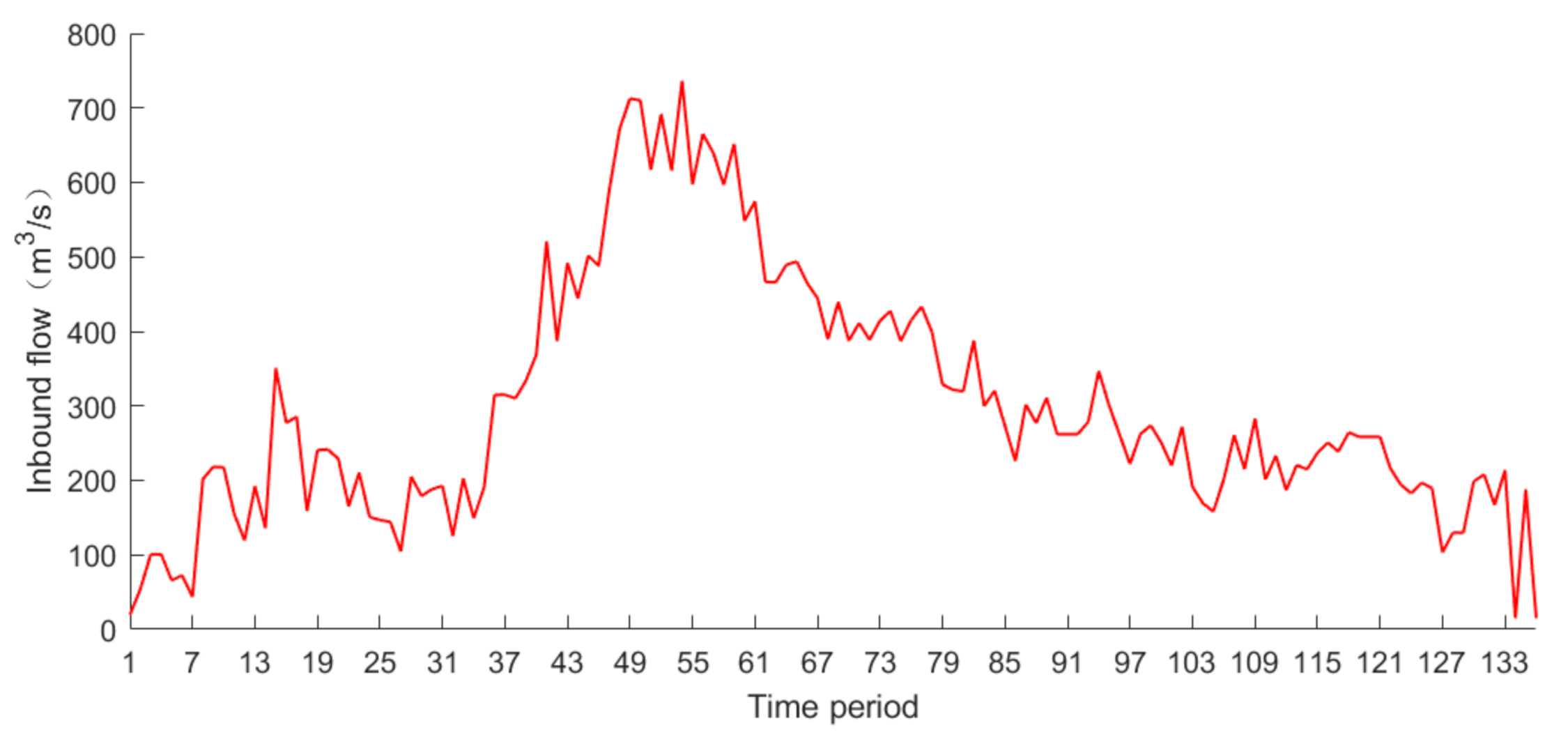
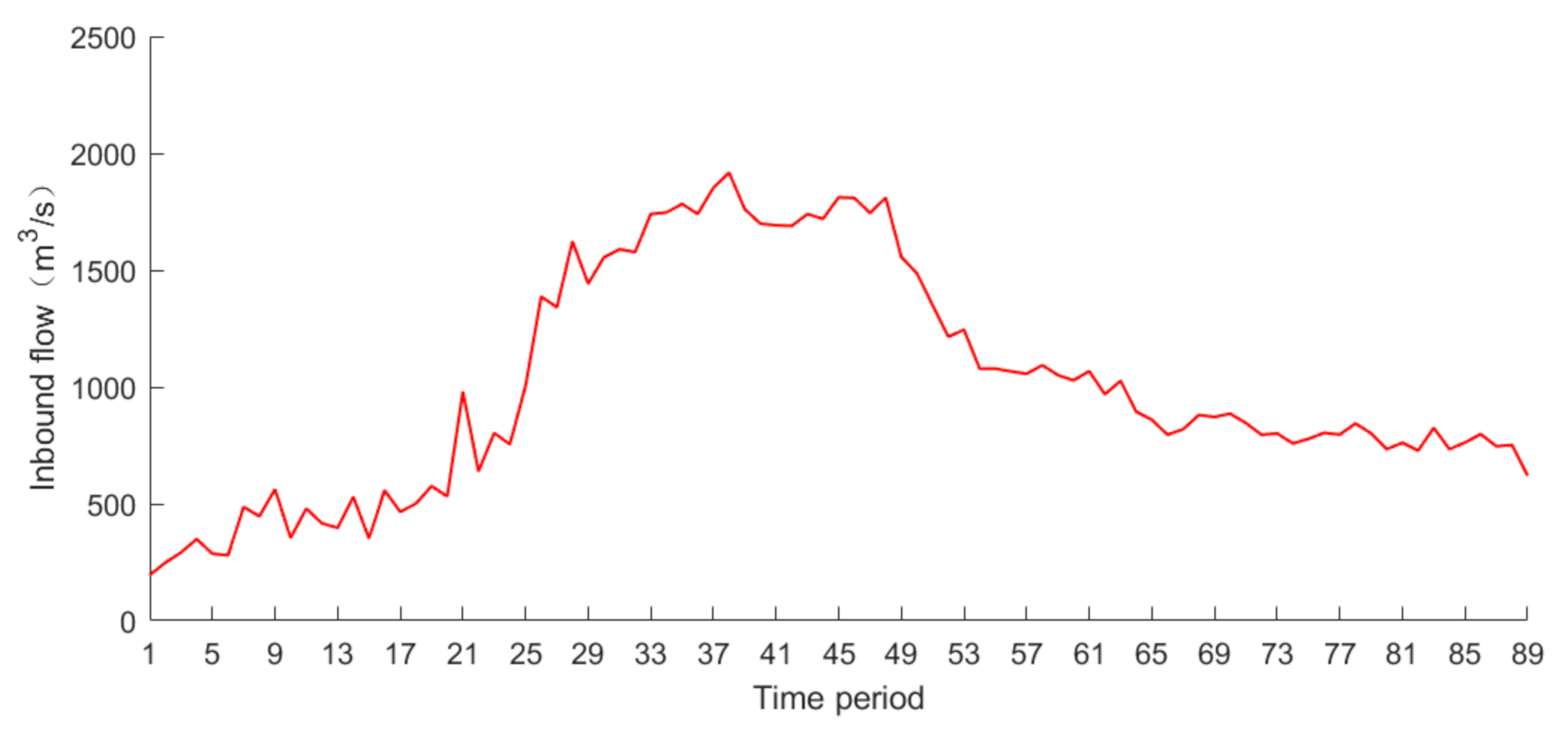
- The scheduling time intervals of the two floods are 1 h. The scheduling periods of the first flood are 136 periods; the scheduling periods of the second flood are 89 periods. Among them, the first flood began on 17 March 2020, and stopped on 22 March 2020 and the second flood began on 1 April 2020, and stopped on 5 April 2020.
- (4)
4.4. Calculation Results and Analysis
4.4.1. Conventional Scheduling Results
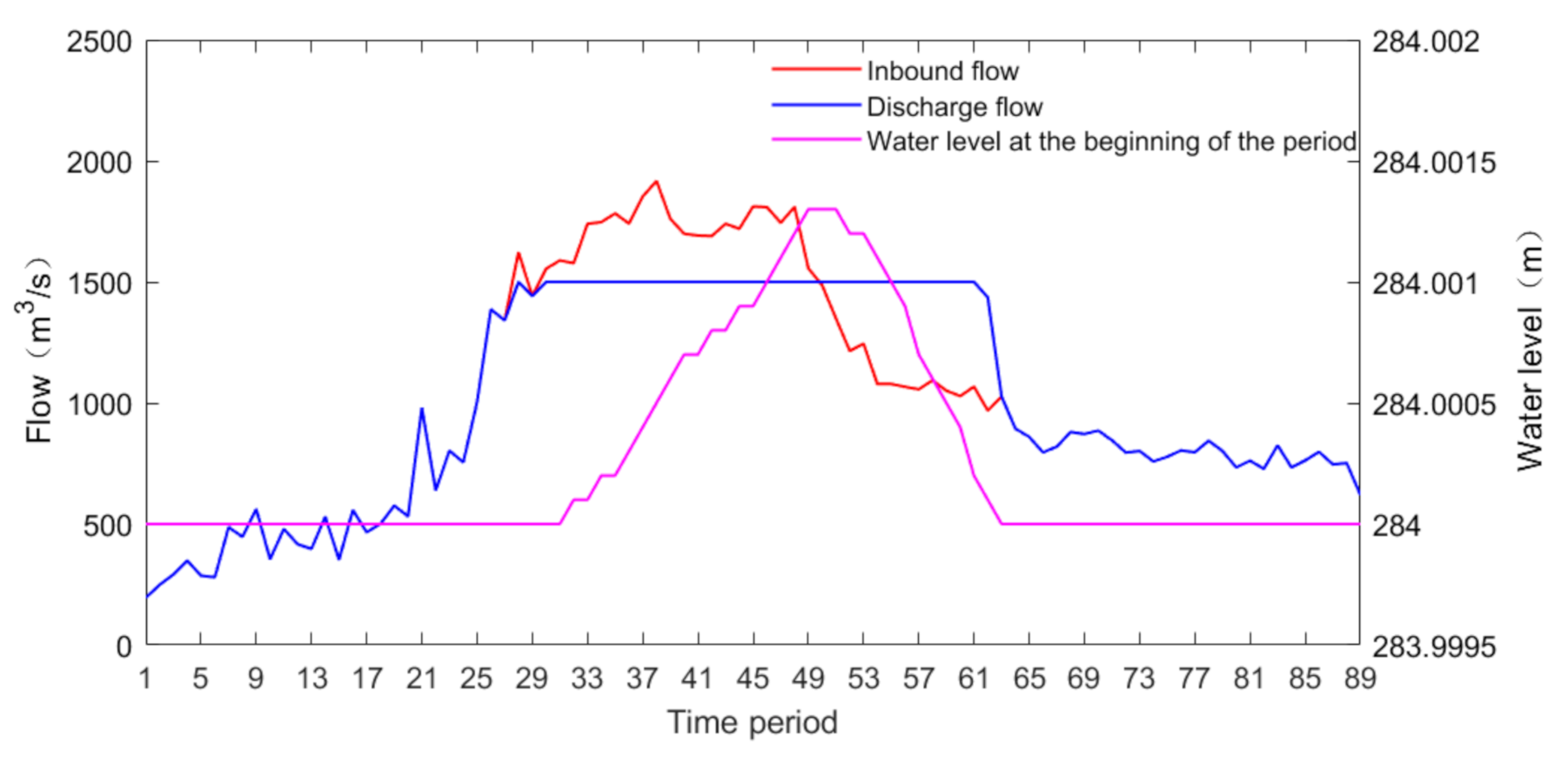
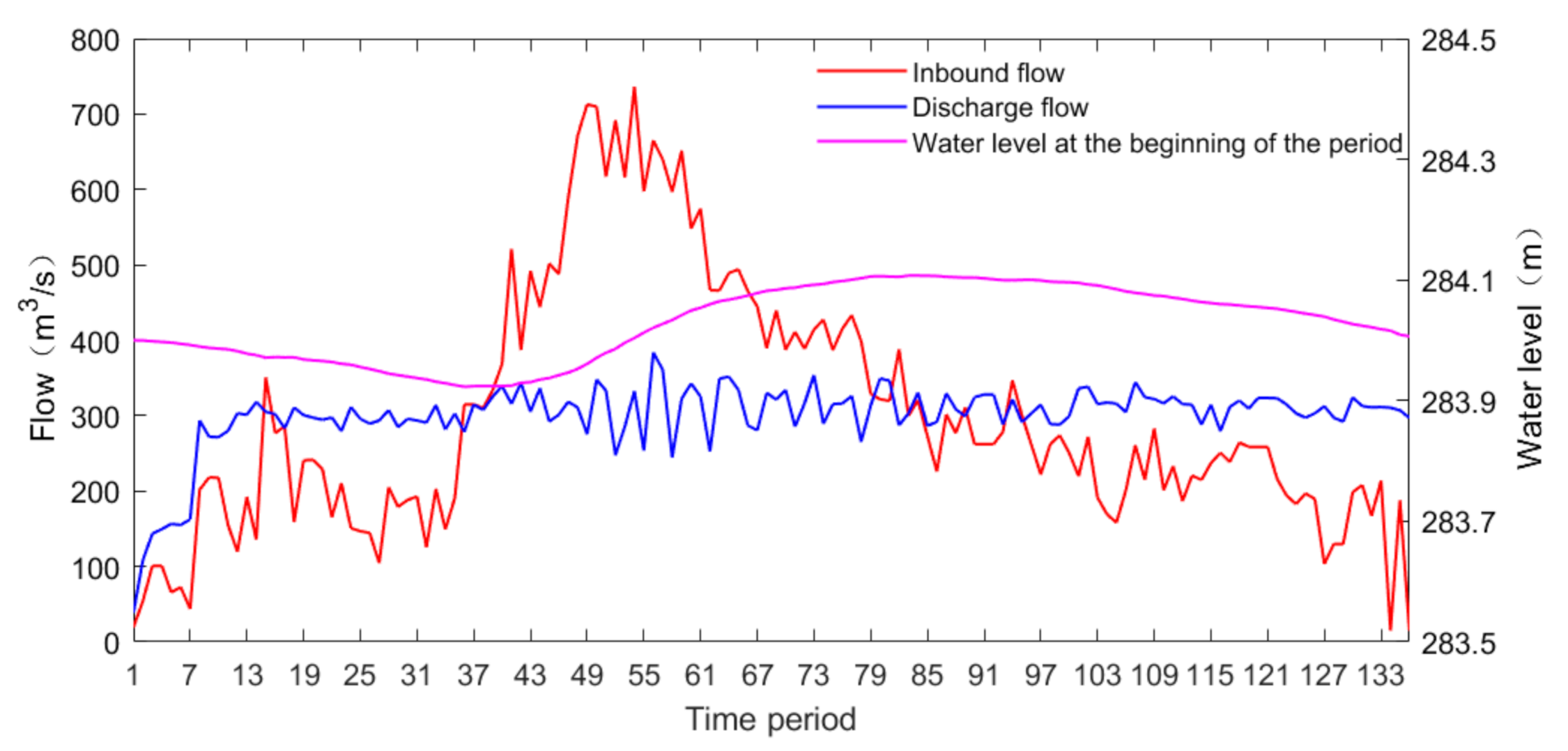
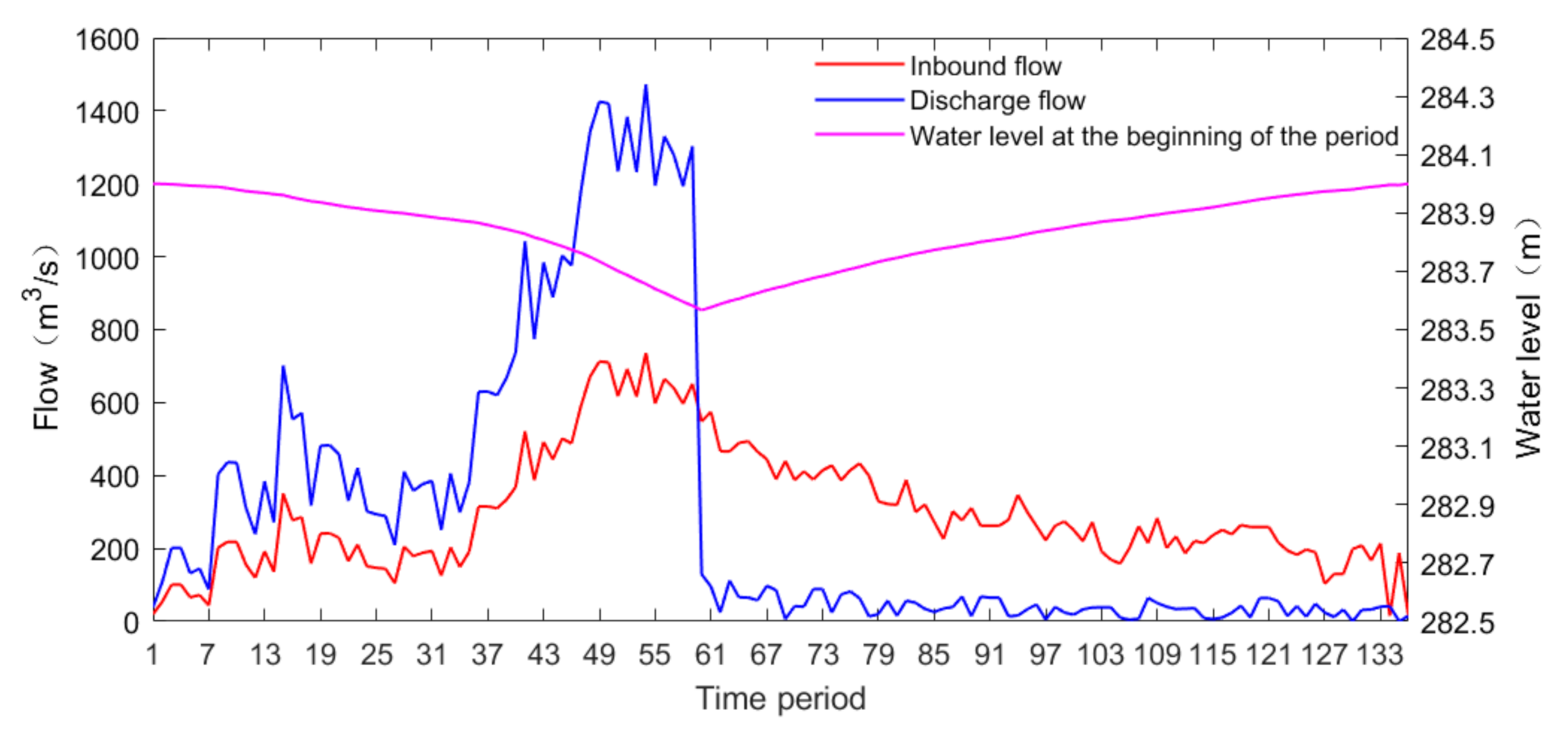
4.4.2. Optimal Scheduling Results
4.4.3. Comparative Analysis of Results of Conventional Scheduling and Optimal Scheduling
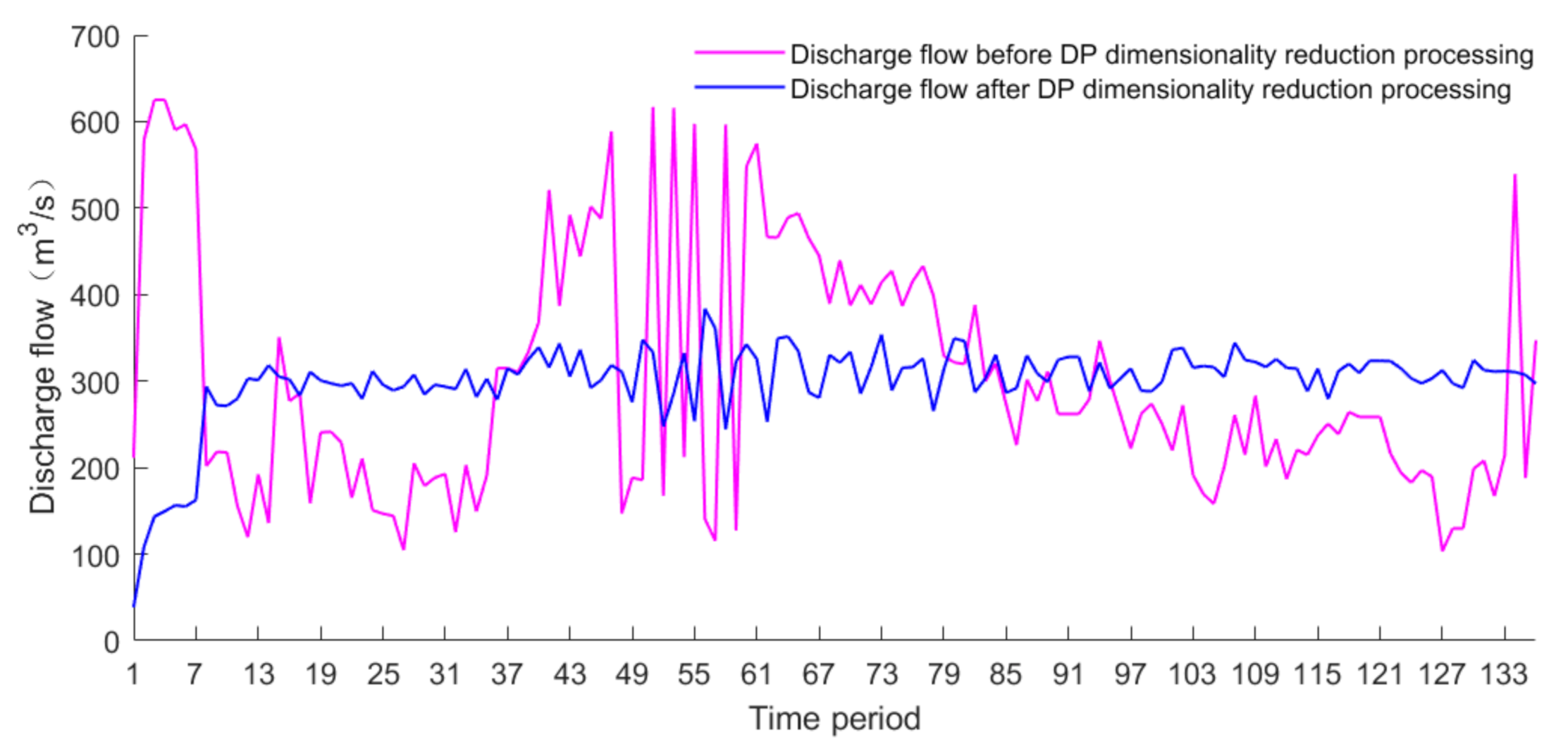
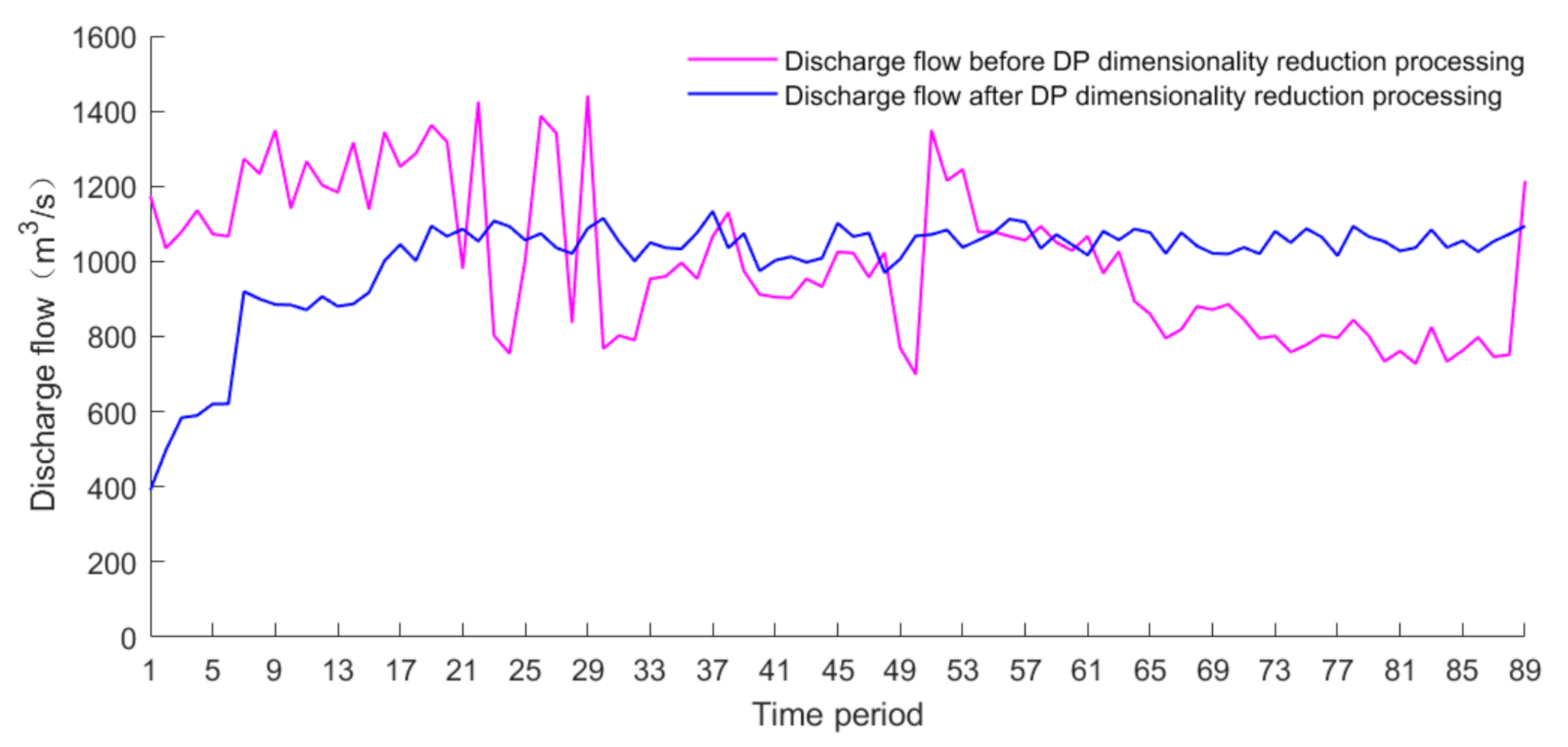
4.4.4. Results before and after DP Dimensionality Reduction Processing
4.4.5. Comparative Analysis of Results before and after DP Dimensionality Reduction Processing
5. Conclusions
- (1)
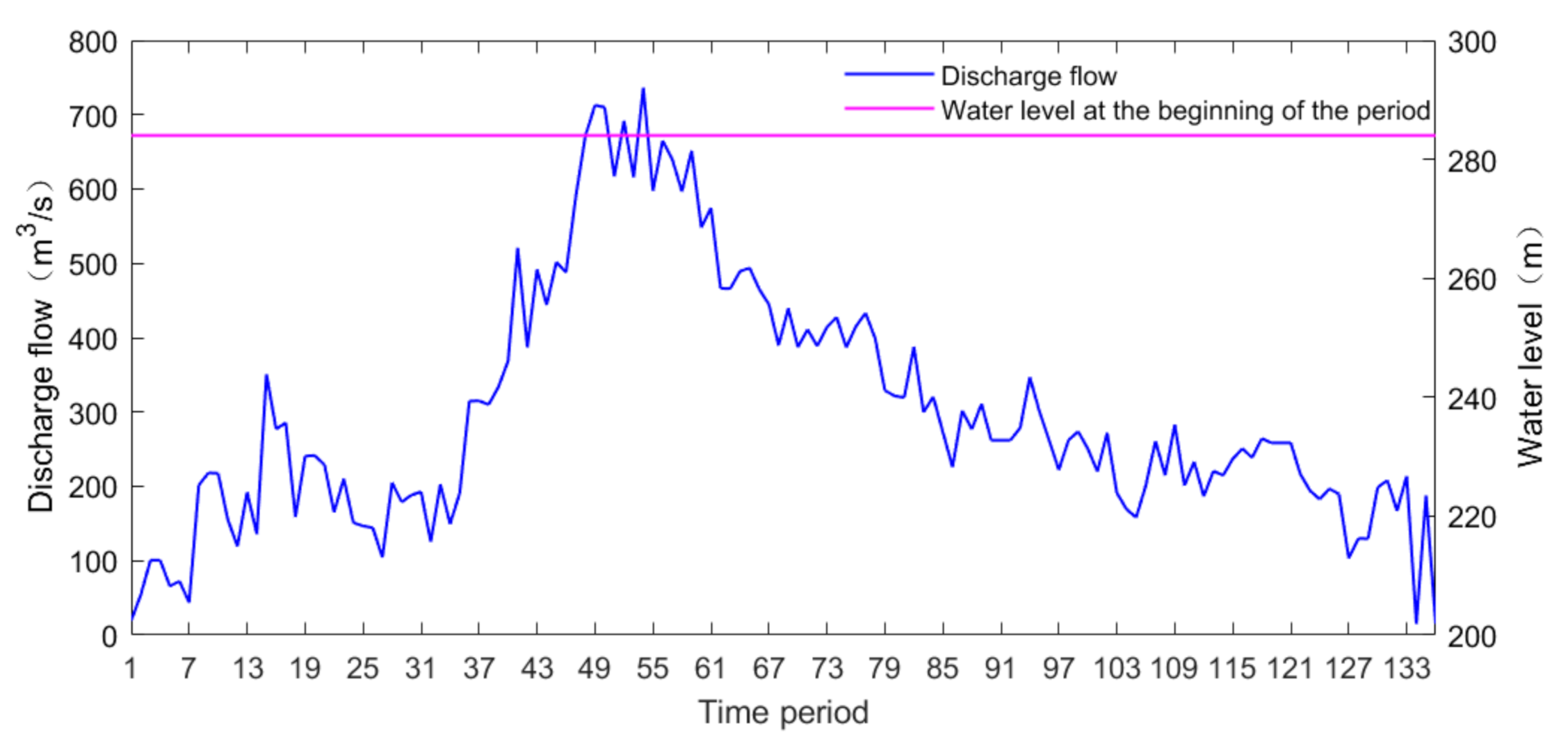
- Through the analysis of the results of conventional scheduling and optimal scheduling, it is found that the conventional scheduling is scheduled according to the five-year flood standard, the maximum discharge flow does not exceed the allowable value during scheduling, and the reservoir water level remains unchanged. This paper is based on the improved DP algorithm, when scheduling with the maximum peak clipping criterion, the discharge flows of the two floods in the whole process are concentrated near a certain fixed value, and both are lower than the maximum discharge flow of conventional scheduling, which is more conducive to the safety of downstream protection objects. When scheduling under the maximum flood control safety guarantee criterion, the lowest water level of the reservoir is lower than the conventional scheduling result, which increases the flood control storage capacity of the reservoir and is beneficial to the safety of the reservoir itself and the downstream protection objects.
- (2)
- In terms of the DP dimensionality reduction processing method, due to the proposed variable discrete mechanism of retracting space, the computation amount of DP is reduced, so the calculation time after processing is lower than that before processing. The calculation time after the first flood dimensionality reduction processing is reduced by about 65%, and the second flood is reduced by about 59%, which effectively reduces the calculation time of the DP algorithm. Therefore, when this method is applied to the joint scheduling of reservoirs and flood scheduling on an hourly scale, the calculation efficiency and the accuracy of the calculation results will be greatly improved.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Su, C.; Yuan, W.; Cheng, C.; Wang, P.; Sun, L.; Zhang, T. Short-term generation scheduling of cascade hydropower plants with strong hydraulic coupling and head-dependent prohibited operating zones. J. Hydrol. 2020, 591, 125556. [Google Scholar] [CrossRef]
- Periçaro, G.A.; Karas, E.W.; Gonzaga, C.C.; Marcílio, D.C.; Oening, A.P.; Matioli, L.C.; Detzel, D.H.; de Geus, K.; Bessa, M.R. Optimal non-anticipative scenarios for nonlinear hydrothermal power systems. Appl. Math. Comput. 2020, 387, 124820. [Google Scholar] [CrossRef]
- Zeng, X.; Hu, T.; Cai, X.; Zhou, Y.; Wang, X. Improved dynamic programming for parallel reservoir system operation optimization. Adv. Water Resour. 2019, 131, 103373. [Google Scholar] [CrossRef]
- Bellman, R.E. Dynamic Programming; Princeton University Press: Princeton, NJ, USA, 1957. [Google Scholar]
- Zhao, T.T.G.; Cai, X.M.; Lei, X.H.; Wang, H. Improved dynamic programming for reservoir operation optimization with a concave objective function. J. Water Resour. Plan Manag. 2012, 138, 590–596. [Google Scholar] [CrossRef]
- Yang, D.W.; Zhao, T.T.G.; Zhao, J.S. Improved dynamic programming for hydropower reservoir operation. J. Water Resour. Plan Manag. 2014, 140, 365–374. [Google Scholar]
- Cheng, C.T.; Cheng, X.; Shen, J.J.; Wu, X.Y. Short-term peak shaving operation for multiple power grids with pumped storage power plants. Int. J. Electr. Power Energy Syst. 2015, 67, 570–581. [Google Scholar] [CrossRef]
- Larson, R.; Korsak, A. A dynamic programming successive approximations technique with convergence proofs. Automatica 1970, 6, 245–252. [Google Scholar] [CrossRef]
- Heidari, M.; Chow, V.T.; Kokotović, P.V.; Meredith, D.D. Discrete differential dynamic programing approach to water resources systems optimization. Water Resour. Res. 1971, 7, 273–282. [Google Scholar] [CrossRef]
- Bai, T.; Chang, J.X.; Chang, F.J.; Huang, Q.; Wang, Y.M.; Chen, G.S. Synergistic gains from the multi-objective optimal operation of cascade reservoirs in the Upper Yellow River basin. J. Hydrol. 2015, 523, 758–767. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, P.; Chen, X.; Wang, L.; Ai, X.; Feng, M.; Liu, D.; Liu, Y. Optimal operation of multi-reservoir systems considering time-lags of flood routing. Water Resour. Manag. 2016, 30, 523–540. [Google Scholar] [CrossRef]
- Cheng, C.; Wang, S.; Chau, K.W.; Wu, X. Parallel discrete differential dynamic programming for multi-reservoir operation. Environ. Model Softw. 2014, 57, 152–164. [Google Scholar] [CrossRef] [Green Version]
- He, S.; Guo, S.; Chen, K.; Deng, L.; Liao, Z.; Xiong, F.; Yin, J. Optimal impoundment operation for cascade reservoirs coupling parallel dynamic programming with importance sampling and successive approximation. Adv. Water Resour. 2019, 131, 103375. [Google Scholar] [CrossRef]
- Feng, Z.; Niu, W.; Jiang, Z.; Qin, H.; Song, Z.G. Monthly operation optimization of cascade hydropower reservoirs with dynamic programming and Latin hypercube sampling for dimensionality reduction. Water Resour. Manag. 2020, 34, 2029–2041. [Google Scholar] [CrossRef]
- Zhang, Y.K.; Jiang, Z.Q.; Ji, C.M.; Sun, P. Contrastive analysis of three parallel modes in multi-dimensional dynamic programming and its application in cascade reservoirs operation. J. Hydrol. 2015, 529, 22–34. [Google Scholar] [CrossRef]
- Ji, C.M.; Jiang, Z.Q.; Sun, P.; Zhang, Y.K.; Wang, L.P. Research and Application of Multidimensional Dynamic Programming in Cascade Reservoirs Based on Multilayer Nested Structure. J. Water Resour. Plan. Manag. 2015, 141, 1–13. [Google Scholar] [CrossRef]
- Jiang, Z.Q.; Hui, Q.; Ji, C.M.; Feng, Z.K.; Zhou, J.Z. Two Dimension Reduction Methods for Multi-Dimensional Dynamic Programming and Its Application in Cascade Reservoirs Operation Optimization. Water 2017, 9, 634. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Wang, L. Research status and the prospect of joint flood control dispatching of reservoir group. Hydropower Energy Sci. 2004, 2, 30–32. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Comparative Items | Before the First Flood DP Dimensionality Reduction Processing | After the First Flood DP Dimensionality Reduction Processing | Before the Second Flood DP Dimensionality Reduction Processing | After the Second Flood DP Dimensionality Reduction Processing |
|---|---|---|---|---|
| Calculated time (s) | 162 | 56 | 63 | 26 |
| The average number of discrete points in each period | 1500 | 800 | 1000 | 735 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Jiang, Z.; Liu, Y. Dimensionality Reduction Method of Dynamic Programming under Hourly Scale and Its Application in Optimal Scheduling of Reservoir Flood Control. Energies 2022, 15, 676. https://doi.org/10.3390/en15030676
Wang S, Jiang Z, Liu Y. Dimensionality Reduction Method of Dynamic Programming under Hourly Scale and Its Application in Optimal Scheduling of Reservoir Flood Control. Energies. 2022; 15(3):676. https://doi.org/10.3390/en15030676
Chicago/Turabian StyleWang, Suiling, Zhiqiang Jiang, and Yi Liu. 2022. "Dimensionality Reduction Method of Dynamic Programming under Hourly Scale and Its Application in Optimal Scheduling of Reservoir Flood Control" Energies 15, no. 3: 676. https://doi.org/10.3390/en15030676
APA StyleWang, S., Jiang, Z., & Liu, Y. (2022). Dimensionality Reduction Method of Dynamic Programming under Hourly Scale and Its Application in Optimal Scheduling of Reservoir Flood Control. Energies, 15(3), 676. https://doi.org/10.3390/en15030676