1. Introduction
The modular multilevel converter (MMC) has the advantages of significant redundancy, less harmonic content, and high conversion efficiency [
1,
2,
3], and has been widely used in high-voltage direct current (HVDC) transmission. However, in the actual process, several MMC-HVDC projects have reported broadband resonance accidents with frequencies covering a dozen Hz to several hundred Hz [
4,
5,
6,
7,
8], which seriously affect the safe and stable operation of the power system and cause huge losses.
Grid-connected system stability analysis based on impedance modeling has now been recognized as an effective method and widely used in the stability analysis of MMC grid-connected systems. Several scholars have established a more accurate MMC impedance modeling using the multi-harmonic linearization method [
9,
10,
11,
12] or the multi-harmonic state space method (HSS) [
13,
14,
15]. However, in the above models, the DC side of MMC-HVDC is often simplified as an ideal DC source which means the dynamic of the DC bus voltage control will be ignored. In the analysis of permanent magnet synchronous generators (PMSG) integrated into a power grid system, it has been found that the DC voltage control is an essential factor in determining the impedance characteristics of the machine side PMSG. In practical MMC-HVDC projects, there must be a current-source converter station to support the DC-side voltage [
14]; the impact of DC voltage control on the impedance characteristics of the converter station cannot be ignored. Thus, it is worth studying the DC voltage control of the MMC impedance model and its impact on the MMC impedance characteristics as well as grid-connected system stability.
Voltage feedforward control is also commonly used in practical projects to mitigate the imbalance of the grid voltage and improve the performance of the converter [
14,
15,
16]. Most of the existing impedance modeling and stability analysis of MMC-HVDC ignore the influence of voltage feedforward control. However, voltage feedforward control has a non-negligible impact on the impedance characteristics and system stability of MMC-HVDC [
17], so it is necessary to analyze the grid stability of MMC-HVDC and its impedance optimization method under the premise of considering voltage feedforward.
The impedance optimization of the converter can effectively improve the impedance characteristics of the system at the resonance frequency and reduce the risk of resonance [
15]. Studies have been conducted to optimize the design of control parameters such as current control [
18,
19] and voltage feedforward control [
20,
21], which affect the stability of MMC-HVDC integrated systems on high-frequency ranges. Due to the complex structure, the impedance influence factors of MMC-HVDC are quite complex, especially in the sub-/super-synchronous frequency. Numerous control loops, including DC voltage control and voltage feedforward control, are coupled with each other, which makes it challenging to optimize the impedance characteristic of MMC-HVDC and improve grid-connected system stability [
22,
23].
To address the problem of ignoring DC voltage control and voltage feedforward control in the existing stability analysis of the MMC-HVDC integrated system, an impedance optimization method based on the impedance characteristic considering DC voltage control and voltage feedforward control is proposed in this paper to enhance the system stability. The rest of this paper is organized as follows. An MMC sequence impedance modeling considering DC voltage control and voltage feedforward control is present in
Section 2. The influencing factors of control parameters are discussed in
Section 3. In
Section 4, the effects of DC voltage control and voltage feedforward control on the stability of the system are discussed. In
Section 5, an MMC-HVDC impedance optimization method based on stability boundary design is proposed to effectively improve the system stability.
2. Impedance Modeling of MMC-HVDC Considering DC Voltage Control
A typical power and control circuit of MMC-HVDC is shown in
Figure 1. Each phase of MMC-HVDC consists of an upper arm and a lower arm, where both arms contain
n submodules (SM
1 ~ SM
n) and an arm inductor
L. Each submodule is in a half-bridge topology with a module capacitor
Cm. The output voltages and currents of MMC-HVDC are denoted as
vsx and
isx (x = a, b, c), the voltage of DC side is denoted as
vdc, and the three-phase upper arm currents and lower arm currents are denoted as
ixu and
ixl (
x =
a,
b,
c). The typical controls of MMC-HVDC include the DC voltage control, phase current control, PCC voltage feedforward control, circulating current suppression control (CCSC), and phase-locked loop (PLL) to generate
θ [
12].
Hd(
s),
Hi(
s),
Hc(
s), and
Hθ(
s) represent proportional-integral (PI) regulators of DC voltage control, phase current control, CCSC and PLL.
In order to eliminate the adverse effects of high harmonics in the grid, a voltage feedforward controller is usually adopted to filter out the high harmonics of the grid in practical projects; the voltage feedforward controller
Hf(
s) can be expressed as:
where
kf is the voltage feedforward coefficient, and
ωf is the cut-off frequency of the low-pass filter.
In addition, existing studies usually take the DC side as an ideal voltage source to simplify modeling, however, this simplification may lead to inaccurate analysis results of MMC-HVDC. This paper also focuses on the effects of DC voltage control on MMC-HVDC impedance characteristics.
Based on the power conservation law of the DC side and AC side, the small-signal instantaneous power of MMC-HVDC can be expressed as:
where
,
, and
represent the instantaneous power of equivalent capacitance, the inductance of the upper arm, and the instantaneous output power of AC side, respectively.
denotes the side instantaneous power of the DC side which can be expressed as (3)–(6):
where
Zl and
Yc respectively denote the arm inductance impedance and equivalent capacitance admittance at small-signal harmonic frequencies.
VCx,
Ix,
Vsx,
Isx,
Vdc, and
Idc denote the steady-state harmonic matrix obtained by the Toplitz transform of
ixu,
vCx,
isx,
vsx,
idc, and
vdc, respectively.
,
,
,
,
, and
denote the small-signal harmonic vectors of MMC equivalent capacitance voltage, arm current, output voltage and current, and voltage and current of the DC side; the nonzero elements in
T1 ~
T5 are expressed as (A1) (
Appendix A).
Combining Equations (2)–(6), the small-signal harmonic vectors of DC voltage can be expressed as:
where
Based on the dq control structure of MMC-HVDC, the small-signal vector of the insertion index can be modeled as follows:
where the red part in Equation (8) represents the effects of DC voltage control and feedforward control on the small-signal vector of the insertion index.
and
denote the small-signal harmonic vectors of the output current in the dq coordinate system.
Ki represent dq-frame decoupling coefficient of phase current control.
Hi,
Hd, and
Hf are 7 × 7 matrices as shown:
Combined with Equations (7) and (8), the linearized small-signal harmonic vector of the insertion index in abc coordinates is shown as:
where
the nonzero elements in
Q1,
Q2,
Q3, and
Qv2 are expressed as (A2)–(A5) (
Appendix A).
After considering the DC voltage control, the MMC-HVDC small-signal of the power stage is changed to:
where
Mu,
Iu, and
Vu denote the matrices of steady-state signals of the insertion index, arm current, and equivalent capacitive voltage obtained by the Toeplitz transform, and
denotes the small-signal harmonic vector of the equivalent capacitive voltage.
Combining Equations (12) and (13), MMC-HVDC admittance matrix
Y considering DC voltage control and voltage feedforward control can be obtained.
where the MMC-HVDC conductance matrix
Y is a 7 × 7 matrix and the (4, 4) elements of
Y represent the transfer function between the MMC-HVDC output side voltage at
fp frequency and the bridge arm current at the same frequency, so the positive and negative sequence impedance of the MMC-HVDC considering DC voltage control can be defined as
In order to verify the accuracy of the established MMC-HVDC impedance modeling, the MMC-HVDC model including DC voltage control, current control, voltage feedforward control, loop control, and phase lock control was built based on Matlab/Simulink, and the specific simulation parameters are shown in
Table 1.
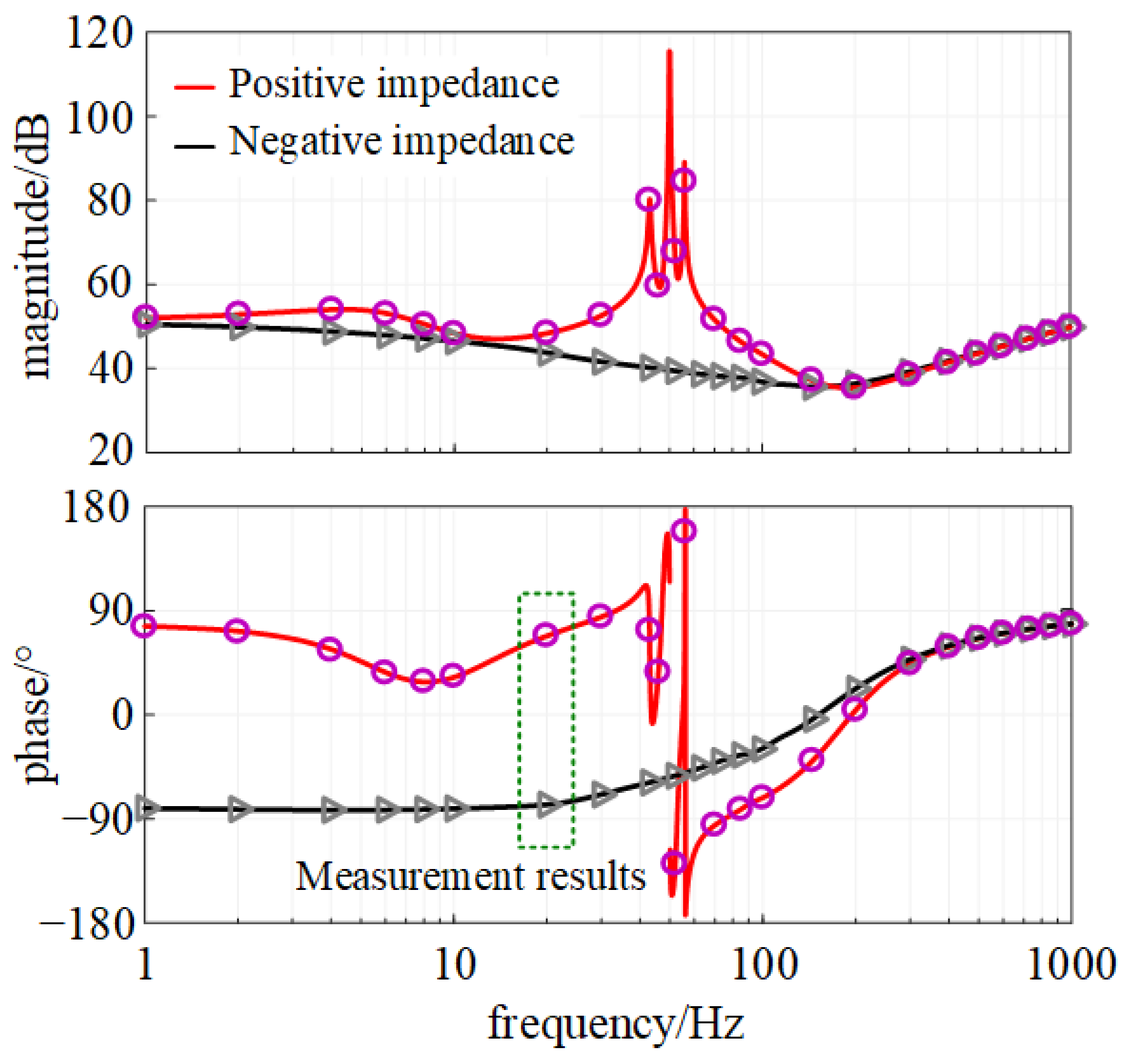
Figure 2 shows the comparison between the analytical and measurement results of both the positive and negative MMC-HVDC impedance. The simulated results are consistent with the analytical results, which confirms the accuracy of the developed MMC-HVDC impedance model.
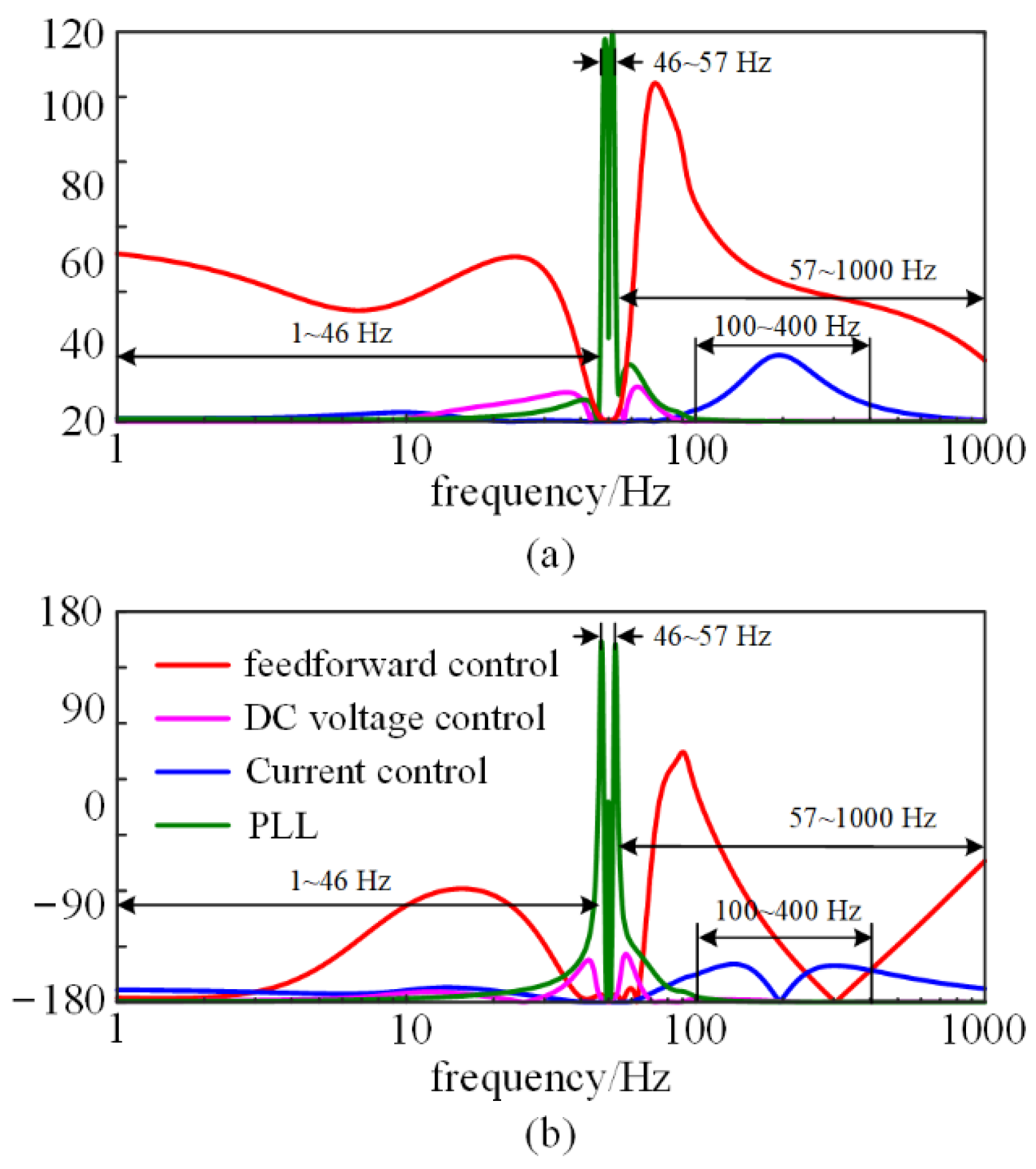
It can be observed that there are apparent differences between the positive and negative sequence impedance of MMC-HVDC; the positive sequence impedance increases with the frequency and the impedance amplitude and phase angle curve change significantly. In the frequency range of 20–80 Hz, the MMC-HVDC impedance is mainly affected by DC voltage control and PLL, and the impedance shows two symmetrical resonance peaks centered on the fundamental frequency. In the range of 80–400 Hz, the MMC-HVDC impedance is dominated by the current loop integrator. In the frequency range above 400 Hz, the MMC-HVDC impedance is mainly influenced by the filter and shows the damping characteristic. The positive and negative sequence impedance of the MMC-HVDC differs significantly in the low-frequency band, but with the increase in frequency both impedance curves gradually coincide.
4. Stability Analysis of MMC-HVDC Integrated System
Based on the developed impedance model in
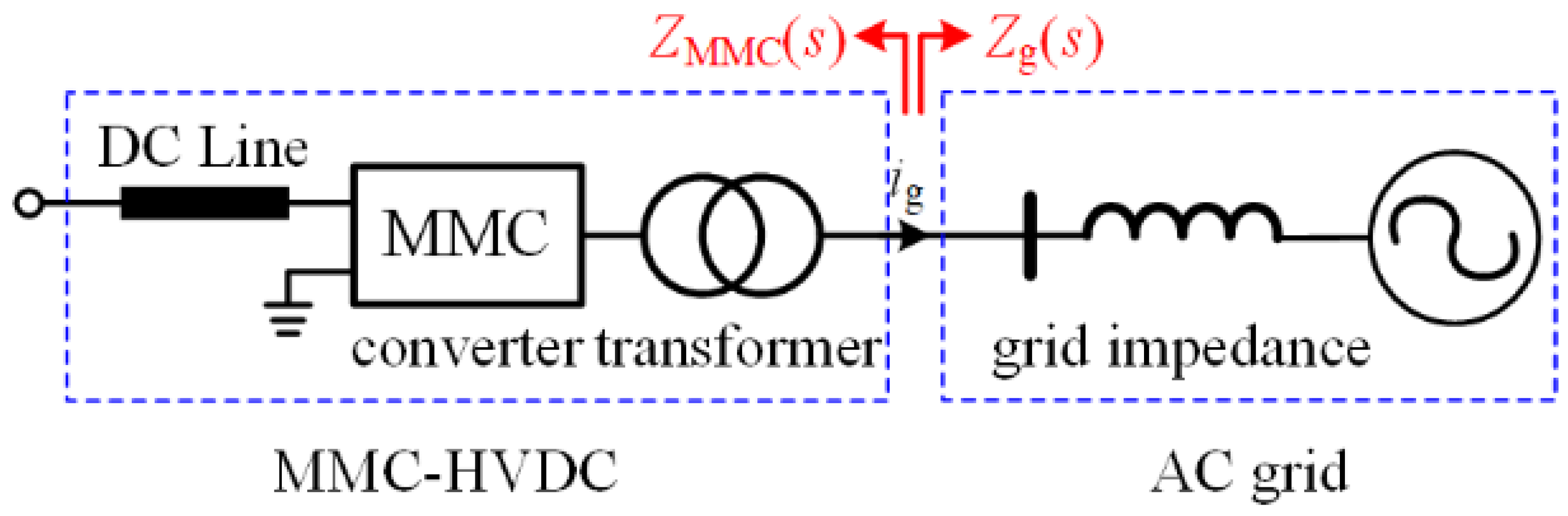
Section 2, the impedance-based analysis method can be used to evaluate the stability of the MMC-HVDC integrated system. The configuration of the MMC-HVDC integrated system used to analyze the stability is presented in
Figure 6, where the impedance of MMC-HVDC is denoted as Z
MMC(s) and the grid impedance is denoted as Z
g(s), and the parameters of MMC-HVDC are presented in
Table 1.
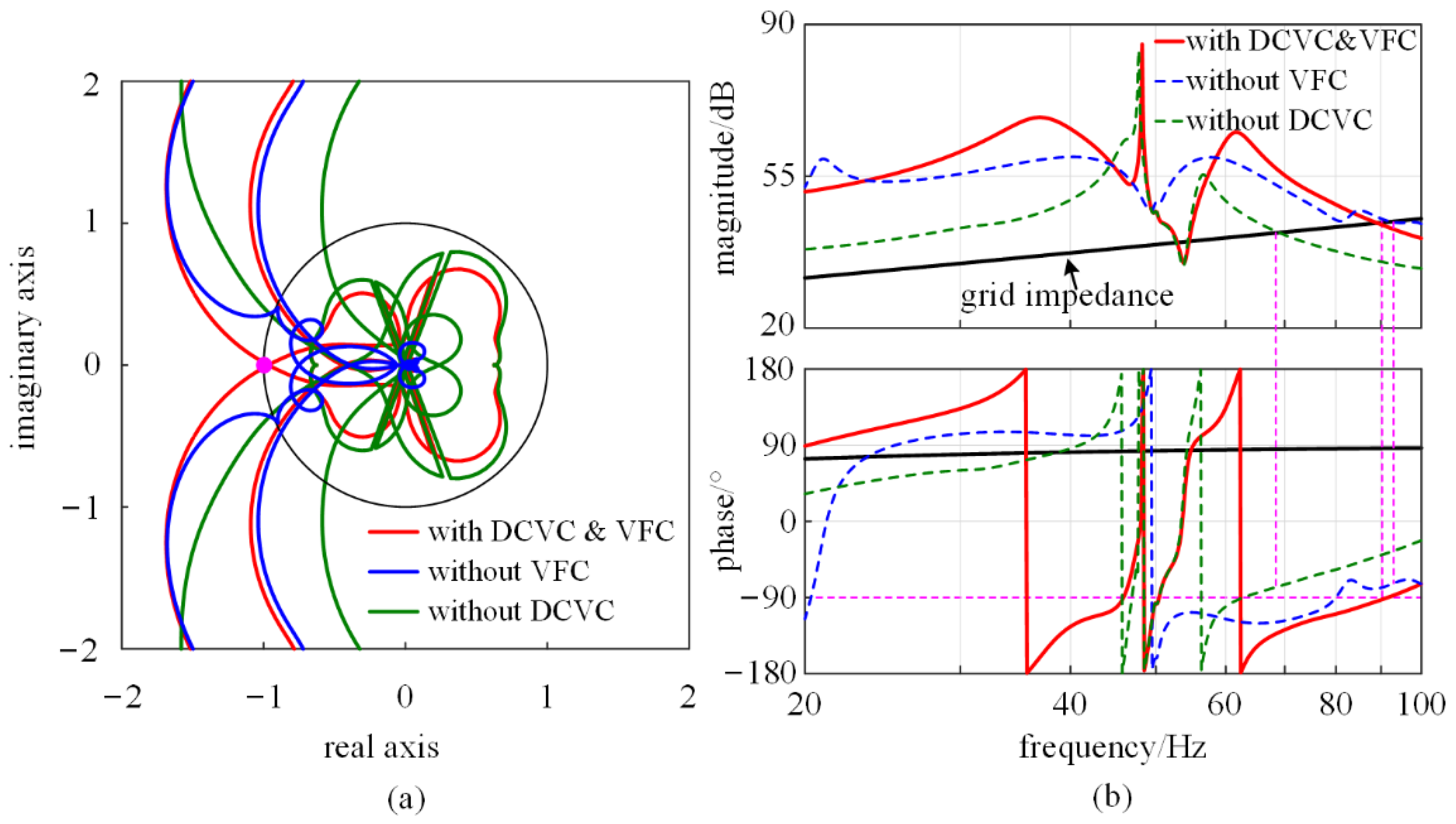
Figure 7a depicts the eigenloci curve of the return ratio matrix
ZMMC(s)/Z
g(s) of three cases. If the DC voltage control or voltage feedforward control is ignored in the system stability analysis, both trajectories will not enclose the (−1,
j 0) point, indicating that the system is stable. However, when both DC voltage control and voltage feedforward control are considered in the stability analysis as an actual control structure, the trajectories will enclose the (−1,
j 0) point clockwise, implying instability. The opposite analysis result indicated that both DC voltage control and voltage feedforward control are not negligible for stability analysis.
Figure 7b illustrates the frequency responses of impedance of MMC-HVDC considering DC voltage control and voltage feedforward control Z
MMC(s) and Z
g(s). The comparison of the impedance that ignores DC voltage control or voltage feedforward control is also shown in
Figure 7b. The interaction characteristic of the MMC-HVDC ignoring DC voltage control or voltage feedforward control with grid impedance implies that the system will be stable. However, the MMC-HVDC impedance shows a negative-damping characteristic at the intersection frequency of 90 Hz, which makes the phase margin of the MMC-HVDC integrated system less than 0°. Those impedance responses may result in a resonance of the MMC-HVDC at the intersection frequency when DC voltage control and voltage feedforward control are considered.
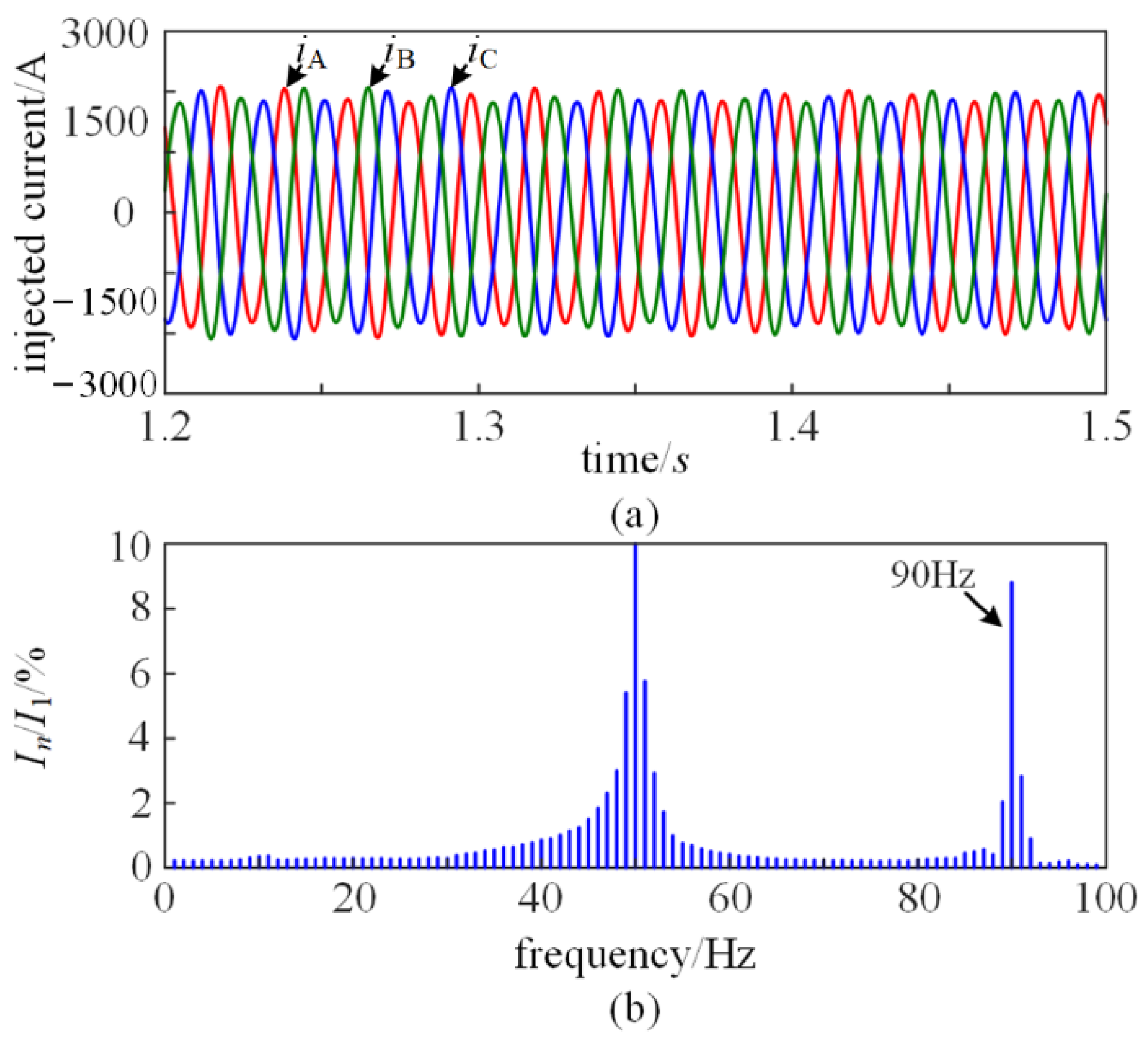
A simulation developed in MATLAB/Simulink was used to verify the above analysis results, and the time-domain simulated results are shown in
Figure 8. It can be found that there are obvious resonance exits in the injected currents of the MMC-HVDC. The corresponding FFT result of the injected current in
Figure 8b confirms the resonance frequency is 90 Hz, which is in agreement with the impedance-based stability analysis.
5. Impedance Optimization Method for MMC-HVDC
From the above analysis, it can be seen that both DC voltage control and voltage feedforward control greatly influence the grid-connected system’s stability. Since the parameters of DC voltage control and voltage feedforward control impact each other, an impedance optimization method based on the stability boundary design is proposed in this section to improve the system stability.
5.1. Stability Boundary for the Control Parameters
According to the above analysis, both DC voltage control and voltage feedforward control have impacts on the MMC-HVDC impedance characteristics and grid-connected system stability in sub-/super-synchronous frequency ranges. The boundary conditions of voltage feedforward control parameters that ensure the grid-connected system stability will be different when the bandwidth of the DC voltage control changes, and vice versa. Therefore, the DC voltage control and voltage feedforward control need to be designed cooperatively.
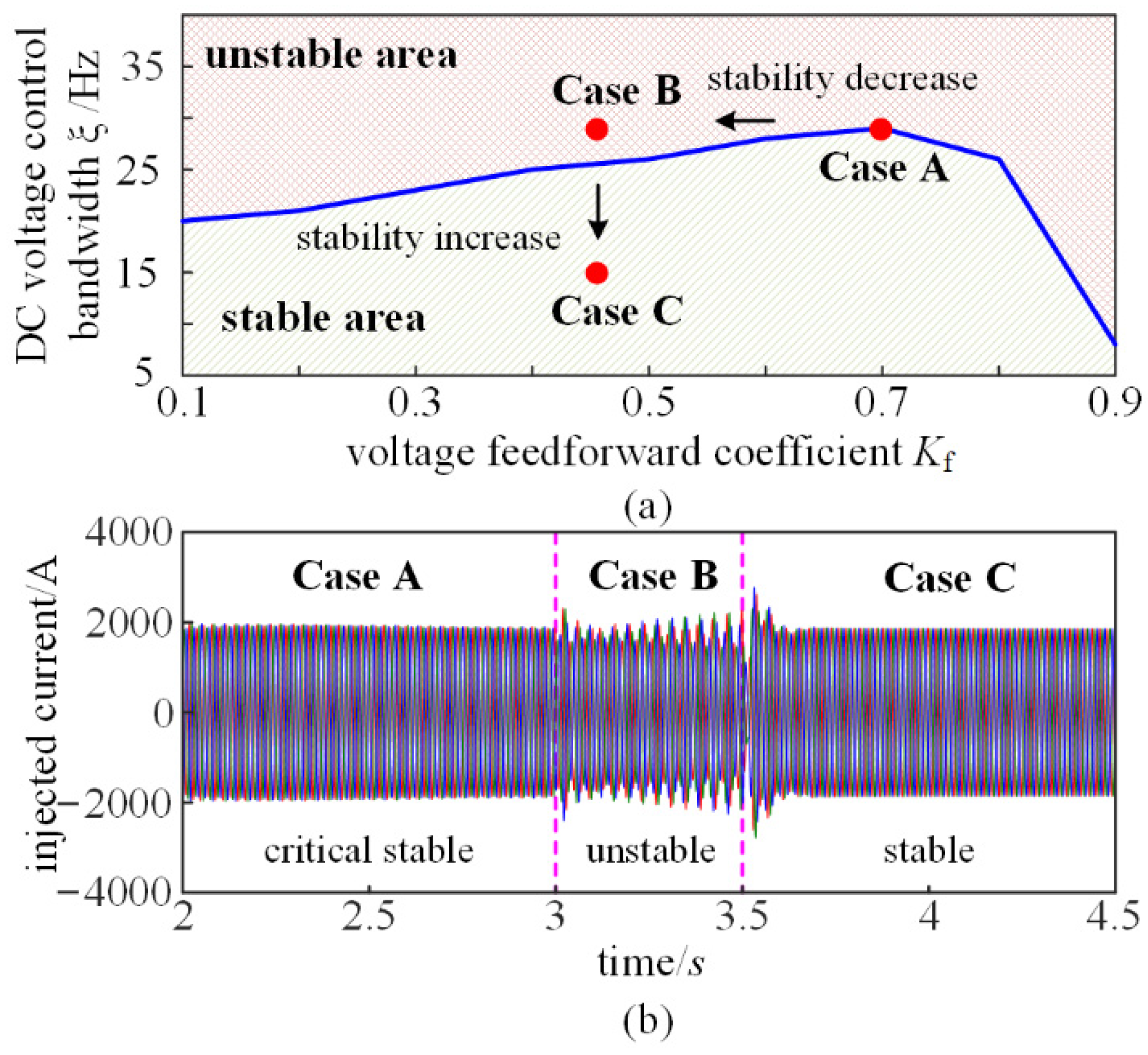
Figure 9a depicts the mapping of the stability margin of MMC-HVDC grid-connected system with different pairs of parameters of DC voltage control and voltage feedforward control. When the parameter combination (
Kf,
ξ) is located in the stable area (the lower area below the solid blue line), the corresponding stability margin is larger than 0. Otherwise, when the parameter combination (
Kf,
ξ) is located in the unstable area (the upper area higher than the solid blue line), the corresponding stability margin is less than 0. The solid blue line with zero stability margin represents the stability boundary of two control parameters to ensure the grid-connected system stability; the blue line is defined as
ξmax(
kf),
kf is between
Kfmin ~
Kfmax that can ensure the self-stability of MMC-HVDC.
Taking the three cases shown in
Figure 9a as an example, Case A is on the blue line (the same case used in Ch. 4), whose DC voltage control bandwidth is 29 Hz and the voltage feedforward coefficient is 0.7, indicating the system is critical stable. If the system changes from Case A to Case B, i.e., the voltage feedforward coefficient decreases from 0.7 to 0.45, then the operating point changes from a stable area to an unstable area. If the system changes from Case B to Case C, i.e., the bandwidth of DC voltage control decreases from 29 Hz to 13 Hz, then the operating point changes from an unstable area to a stable area again.
The injected current waveforms of MMC-HVDC are shown in
Figure 9b. From 2 s to 3 s, the bandwidth of DC voltage control is 29 Hz, and the voltage feedforward coefficient is 0.7 (Case A). The voltage feedforward coefficient changes from 0.7 to 0.45 at 3 s (Case B), and the bandwidth of DC voltage control decreases from 29 Hz to 13 Hz at 3.5 s (Case C). As is shown, injected currents of MMC-HVDC are critically stable/stable in Case A and Case C, and resonance occurs in case B. The simulation results are consistent with the impedance-based stability analysis.
5.2. Impedance Optimization Method Based on Parameters Stability Boundary
All the parameter combinations (
Kf,
ξ) inside the stability boundary can maintain the MMC-HVDC system stable, but the corresponding phase margin will be different. The impedance optimization method of MMC-HVDC is to maximize the phase margin of the system. The relationship between the parameter combination (
Kf,
ξ) and system stability margin is illustrated in
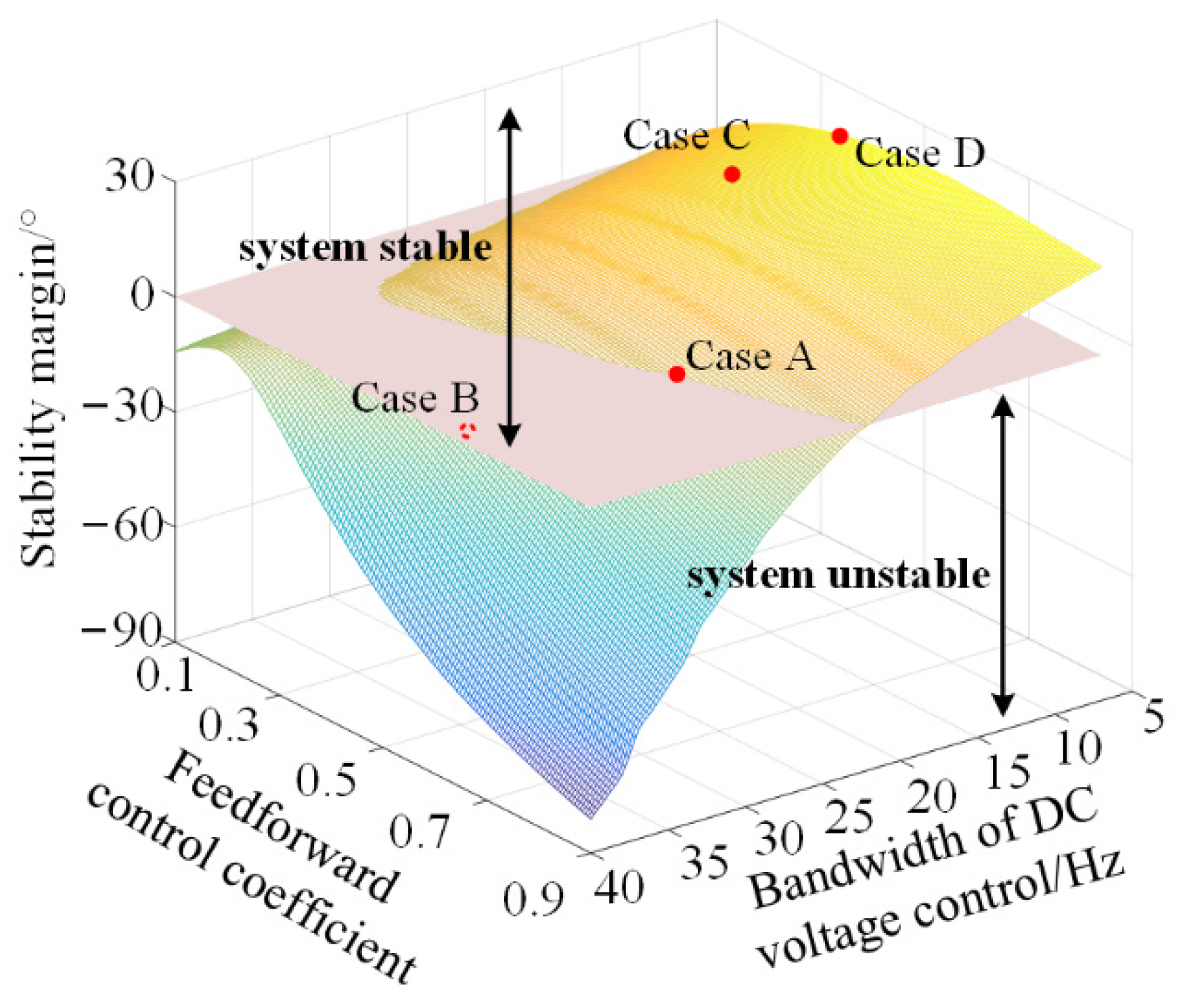
Figure 10. The (
Kf,
ξ) that lead to a zero-stability margin will be on the pink plane as Case A. The (
Kf,
ξ) that lead to a positive stability margin will be above the pink plane as Case C, otherwise, it will be under the pink plane as Case B.
It is difficult to quantify the effect of the parameter combination (
Kf,
ξ) on the phase margin of the integrated system. Thus, the traversal algorithm is used in this section to calculate every phase margin
θs of the MMC-HVDC system under all the (
Kf,
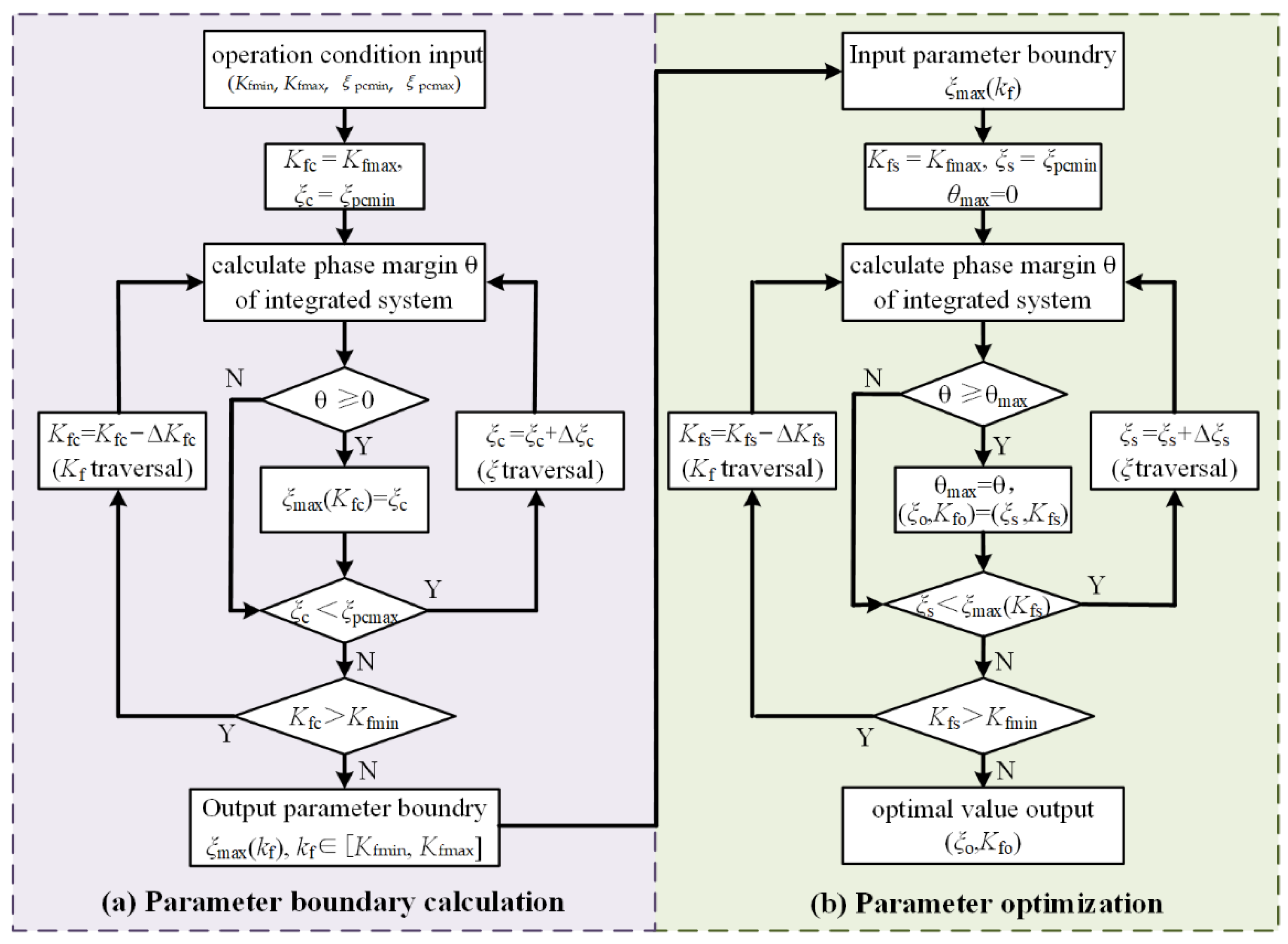
ξ) within the boundary obtained above. Maximizing the phase margin is taken as the aim of impedance optimization. The process of the impedance optimization is shown in
Figure 11. The impedance optimization can be divided into the control parameter stability boundary calculation as shown in
Figure 12a, and traversal searching of optimized control parameters as shown in
Figure 11b.
The process of parameter boundary calculation should be:
Step 1: Input the working conditions of the MMC-HVDC integrated system, including the parameters of the power grid and control parameters and the boundary of parameter combination (Kf, ξ) that can ensure the self-stability of MMC-HVDC denoted as Kfmin ~ Kfmax and ξpcmin ~ ξpcmax.
Step 2: Keep kf as a constant Kfc and traverse all the possible values of bandwidth of DC voltage control ξ within ξpcmin ~ ξpcmax by the step of Δξc and calculate every phase margin under each (Kfc, ξ).
Step 3: Denoted the maximum of ξ that leads to a positive stability margin as ξmax(Kfc) under kf as a constant Kfc.
Step 4: Traversal all the possible value of kf within the Kfmin ~ Kfmax by the step of ΔKfc and repeat steps 2–4.
Step 5: Output stability boundary ξmax(kf), kf ∈ [Kfmin, Kfmax].
The process of parameter optimization should be:
Step 1: Input the working conditions of the MMC-HVDC integrated system as well as the parameter boundary ξmax(kf).
Step 2: Traversal all the possible parameter combination (Kf, ξ) within the ξmax(kf) by the step of ΔKfs and Δξs.
Step 3: Output the maximum of the phase margin and corresponding parameters as the optimal outputs (Kfo, ξo).
In the application shown in
Figure 11, the optimal control parameters of (
Kfo,
ξo) are 5Hz and 0.4, which is shown as Case D, and the maximum phase margin is 26.7°. The system impedance characteristic in Case D (
ξo = 5 Hz,
Kfo = 0.4), Case A (
ξ = 25 Hz,
Kf = 0.7), and Case C (
ξ = 13 Hz,
Kf = 0.45) are compared in
Figure 12. It can be observed that both the amplitude intersection frequency of MMC-HVDC and grid impedance in Case C and Case D change from 90 Hz (Case A) to 78 Hz, where the MMC-HVDC impedance characteristics change from negative-damping to positive-damping. The system stability margin increased more in Case D than in Case C. This verifies that the parameters within the boundary can ensure the grid-connected system stability, and the parameters searched by the proposed optimization method can maximize the phase margin of the system.
The injected current waveforms of MMC-HVDC system are shown in
Figure 13. At the beginning of the simulation, the MMC-HVDC is operated as in Case A. At 2.5 s, the system changes from Case A to Case D (
ξ = 5 Hz,
Kf = 0.4, obtained by the proposed optimization method above). As is shown in
Figure 13a, the injected current of MMC-HVDC contains significant harmonics within 2.5 s and becomes stable after impedance optimization. The THD of the stable current waveforms after optimization is less than 1%. Compared with the optimized control parameter (Case D), Case C of other nonoptimized stability parameters, shown in
Figure 13b, has significantly more current harmonics during the switching processing, indicating that Case C is more likely to introduce resonance due to disturbance. Thus, the proposed impedance optimization method can effectively improve the system stability of MMC-HVDC.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}