
Parameter Identification of Variable Flux Reluctance Machines Excited by Zero-Sequence Current Accounting for Inverter Nonlinearity





Abstract
1. Introduction
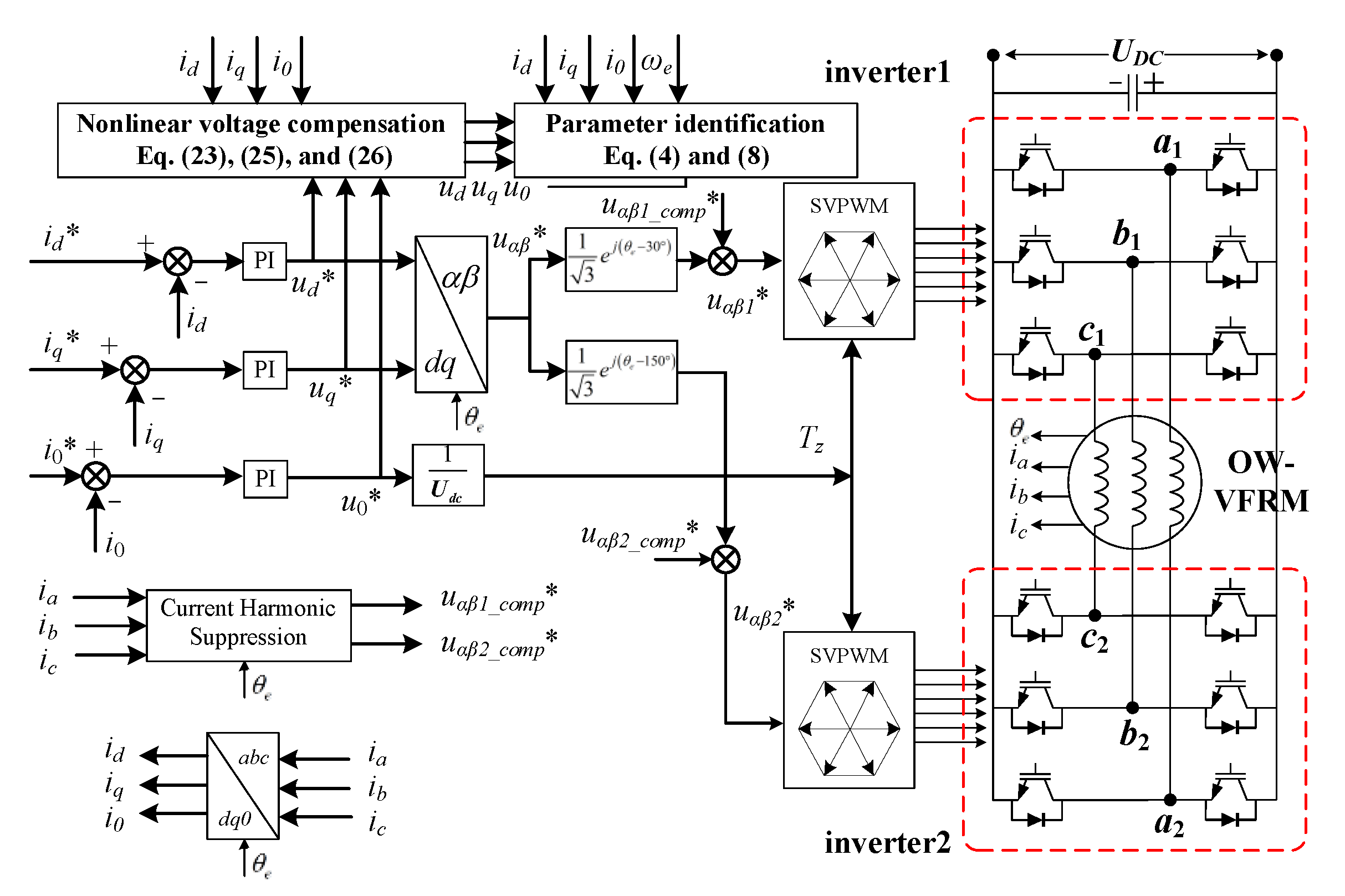
2. Control and Parameter Identification of VFRM
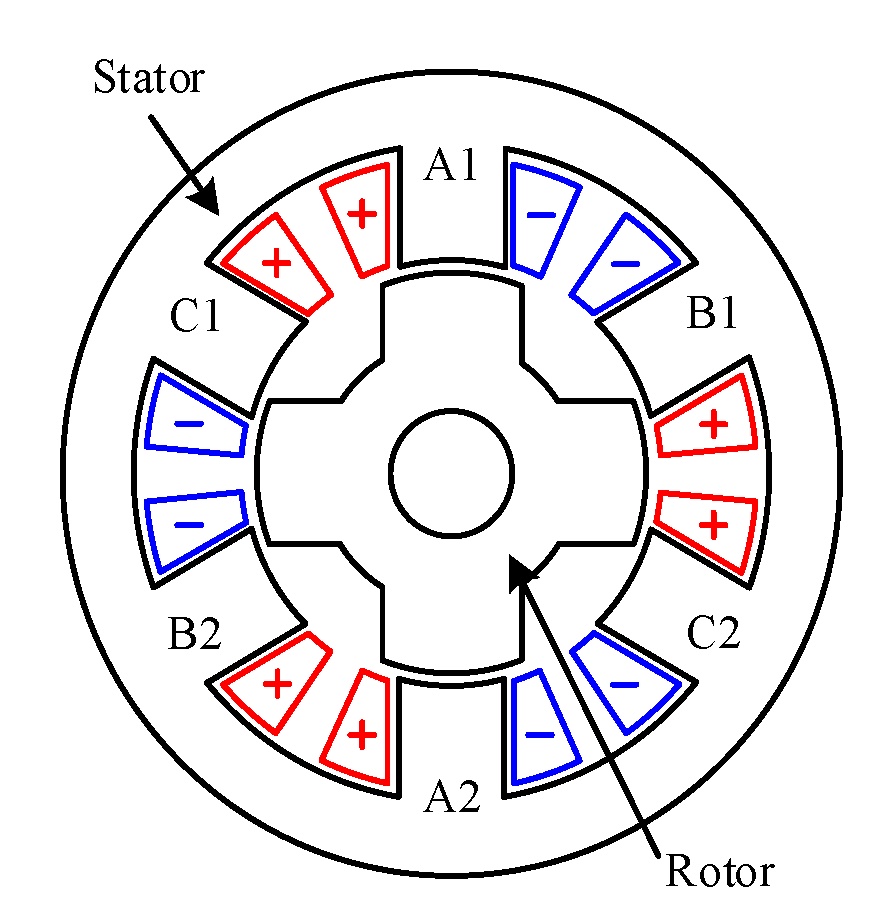
2.1. Model of VFRM
2.2. Parameter Identification of VFRM
3. Nonlinearity of Open Winding Inverter and Its Compensation
3.1. Analysis of Three-Phase Nonlinear Voltage
3.2. Analysis of d-, q-, and 0-Axis Nonlinear Voltage
3.3. Nonlinearity Compensation in Parameter Identification
4. Experimental Results
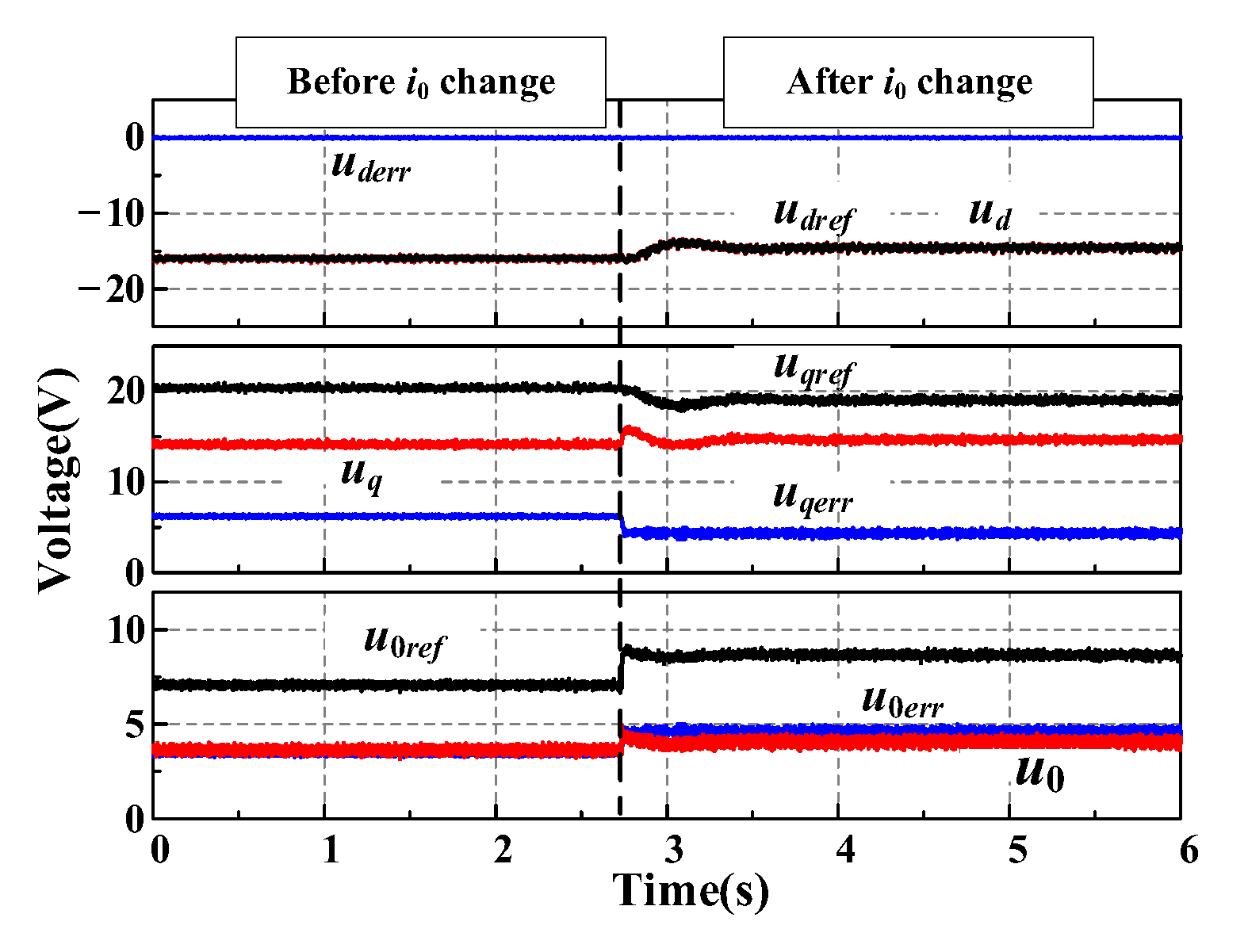
4.1. Inverter Nonlinear Verification
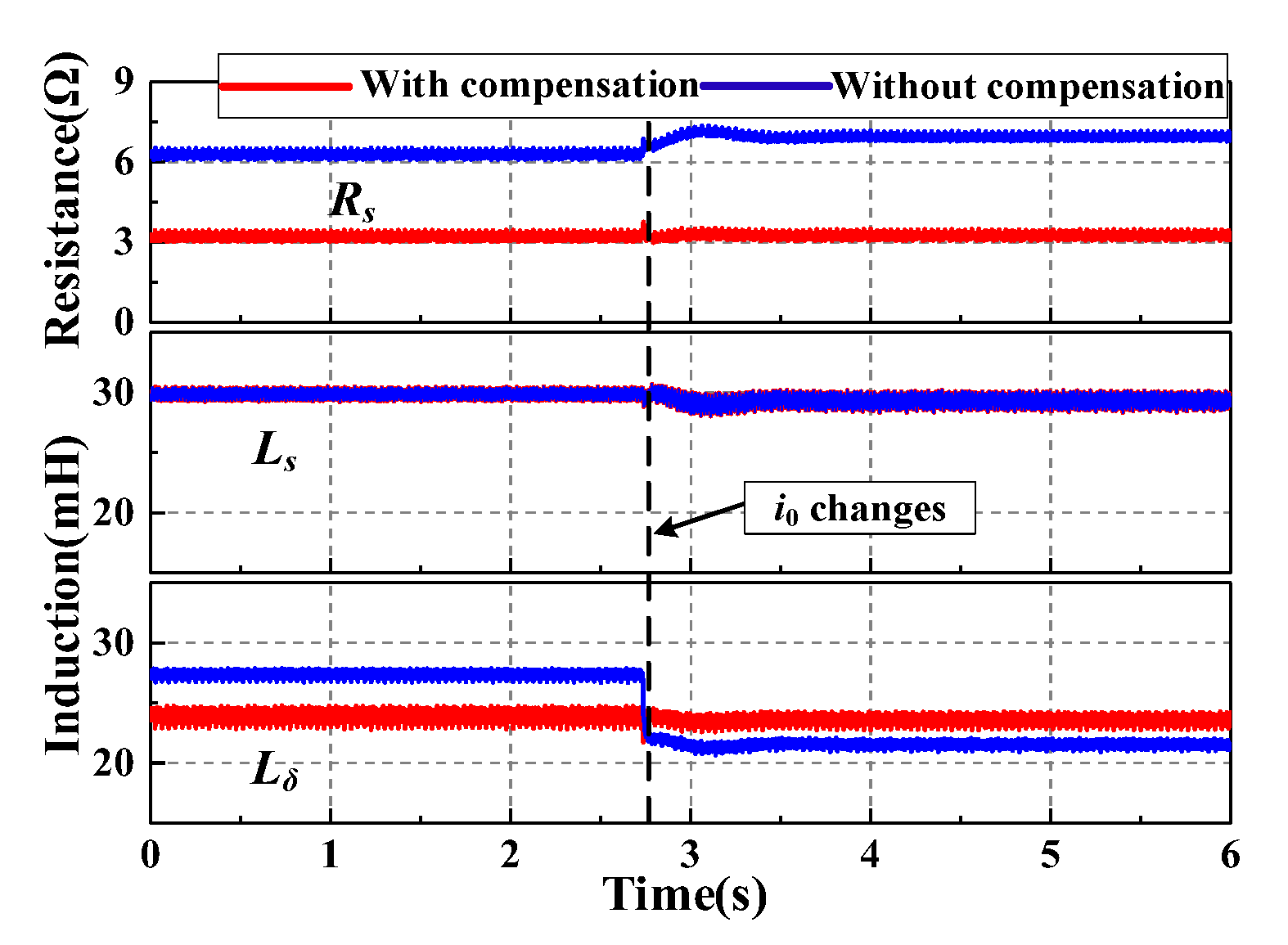
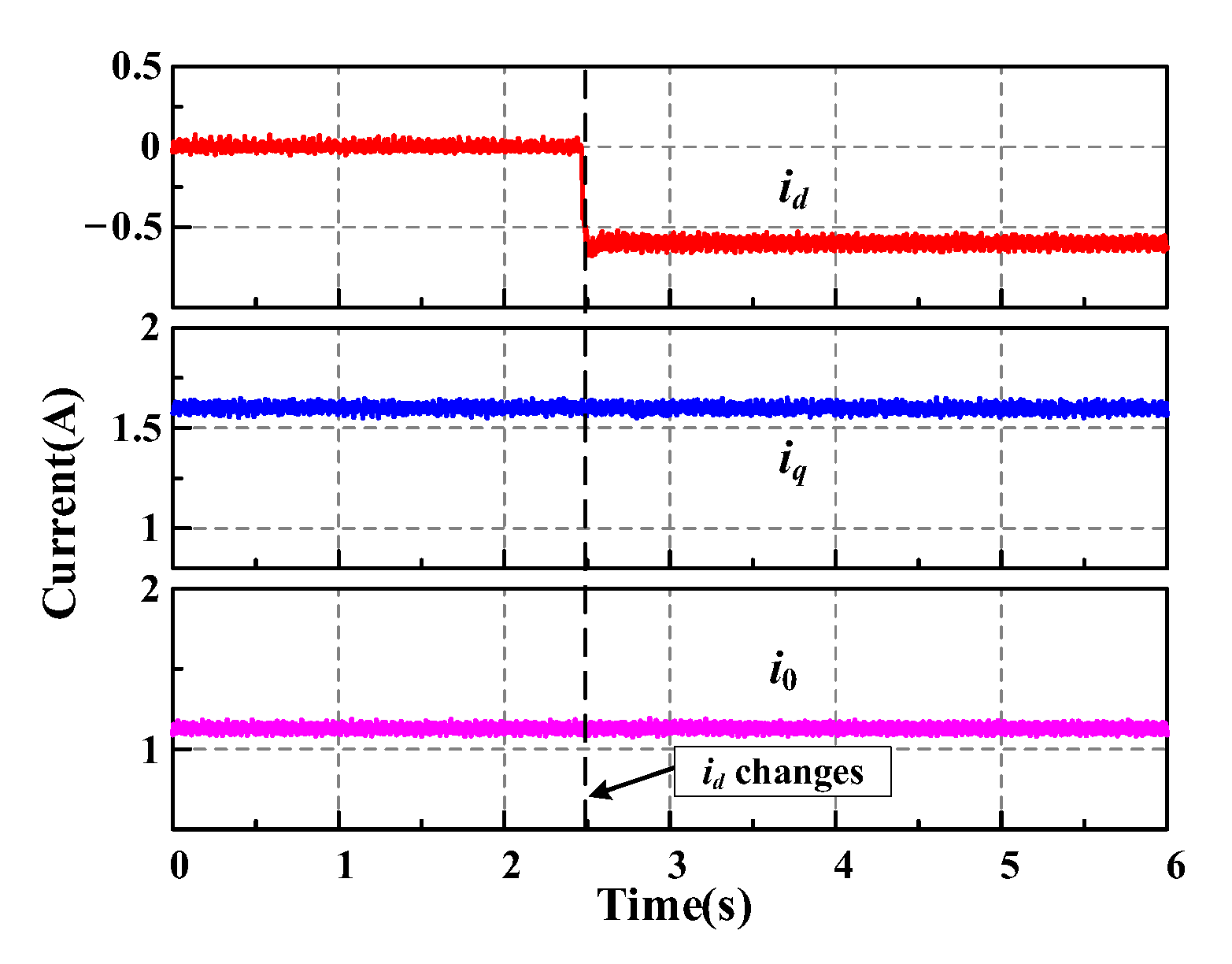
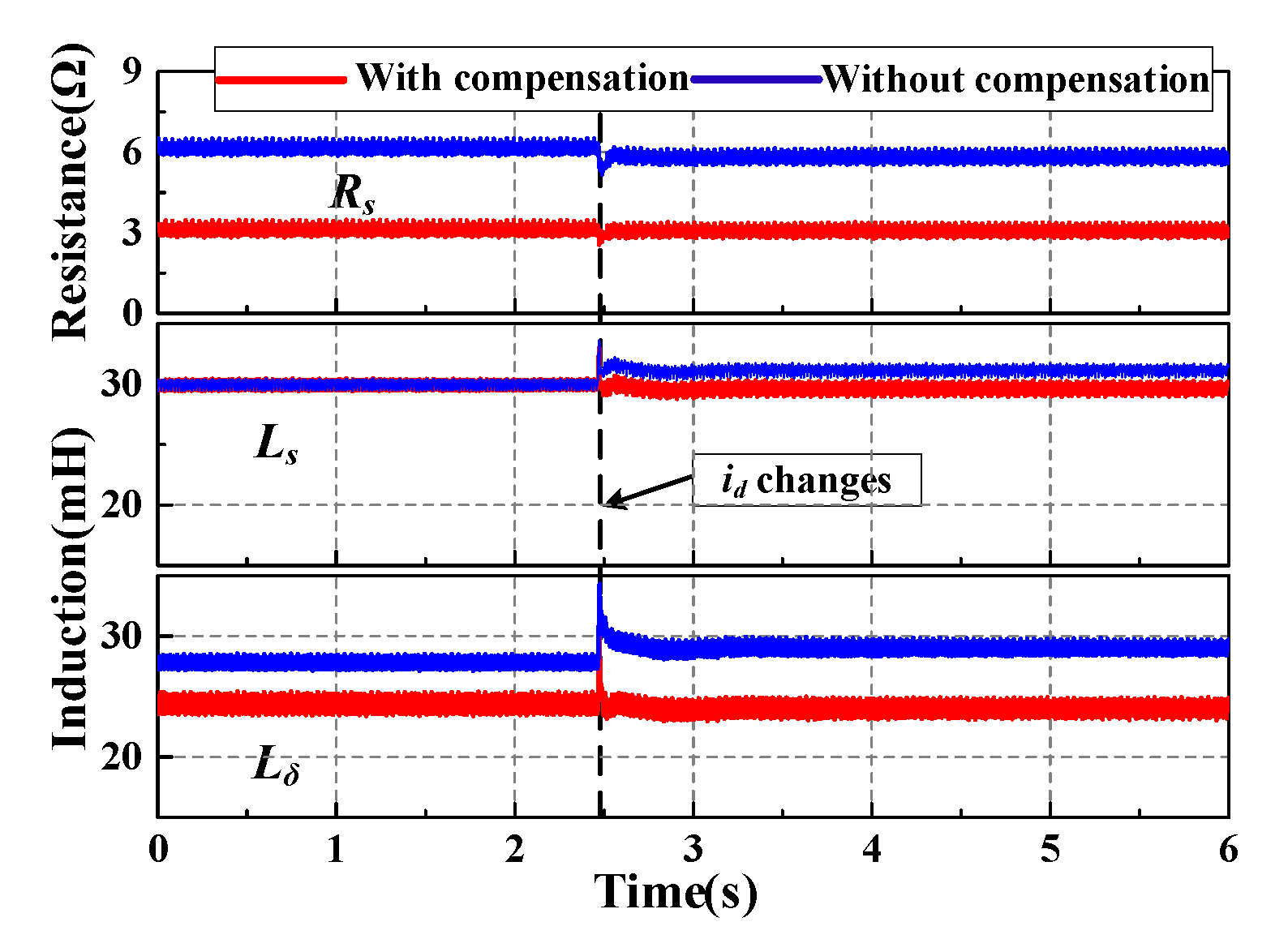
4.2. Influence of Inverter Nonlinearity on Parameter Identification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, Z.Q.; Liu, X. Novel Stator Electrically Field Excited Synchronous Machines Without Rare-earth Magnet. IEEE Trans. Magn. 2015, 51, 8103609. [Google Scholar] [CrossRef]
- Liu, X.; Zhu, Z.Q.; Wu, D. Evaluation of Efficiency Optimized Variable Flux Reluctance Machine for EVs/HEVs by Comparing with Interior PM Machine. In Proceedings of the 2014 17th International Conference on Electrical Machines & Systems, Hangzhou, China, 22–25 October 2014. [Google Scholar]
- Liu, X.; Zhu, Z.Q. Comparative Study of Novel Variable Flux Reluctance Machines With Doubly Fed Doubly Salient Machines. IEEE Trans. Magn. 2013, 49, 3838–3841. [Google Scholar] [CrossRef]
- Guo, J.; Liu, X.; Li, S. Flux-Weakening Control for Variable Flux Reluctance Machine Excited by Zero-Sequence Current Considering Zero-Sequence Resistive Voltage Drop. IEEE Trans. Energy Convers. 2021, 36, 272–280. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Lee, B.; Liu, X. Integrated Field and Armature Current Control Strategy for Variable Flux Reluctance Machine Using Open Winding. IEEE Trans. Ind. Appl. 2016, 52, 1519–1529. [Google Scholar]
- Hu, W.; Ruan, C.; Nian, H.; Sun, D. Simplified Modulation Scheme for Open-End Winding PMSM System With Common DC Bus Under Open-Phase Fault Based on Circulating Current Suppression. IEEE Trans. Power Electron. 2020, 35, 10–14. [Google Scholar] [CrossRef]
- Yu, Z.; Kong, W.; Gan, C.; Qu, R. Power Converter Topologies and Control Strategies for DC-Biased Vernier Reluctance Machines. IEEE Trans. Ind. Electron. 2020, 67, 4350–4359. [Google Scholar] [CrossRef]
- Underwood, S.J.; Husain, I. Online Parameter Estimation and Adaptive Control of Permanent-Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2010, 57, 2435–2443. [Google Scholar] [CrossRef]
- Munoz, A.R.; Lipo, T.A. On-Line Dead-Time Compensation Technique for Open-Loop PWM-VSI Drives. IEEE Trans. Power Electron. 1999, 14, 683–689. [Google Scholar] [CrossRef]
- Wang, H.; Lu, K.; Wang, D.; Blaabjerg, F. Simple and Effective Online Position Error Compensation Method for Sensorless SPMSM Drives. IEEE Trans. Ind. Appl. 2020, 56, 1475–1484. [Google Scholar] [CrossRef]
- Xie, G.; Lu, K.; Dwivedi, S.K.; Riber, R.J.; Wu, W. Permanent Magnet Flux Online Estimation Based on Zero-Voltage Vector Injection Method. IEEE Trans. Power Electron. 2015, 30, 6506–6509. [Google Scholar] [CrossRef]
- Tinazzi, F.; Carlet, P.G.; Bolognani, S.; Zigliotto, M. Motor Parameter-Free Predictive Current Control of Synchronous Motors by Recursive Least-Square Self-Commissioning Model. IEEE Trans. Ind. Electron. 2020, 67, 9093–9100. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Zhu, X.; Sun, P.D.; Howe, D. Estimation of Winding Resistance and PM Flux-Linkage in Brushless AC Machines by Reduced-Order Extended Kalman Filter. In Proceedings of the 2007 IEEE International Conference on Networking, Sensing and Control, London, UK, 15–17 April 2007; pp. 740–745. [Google Scholar]
- Rashed, M.; MacConnell, P.F.A.; Stronach, A.F.; Acarnley, P. Sensorless Indirect-Rotor-Field-Orientation Speed Control of a Permanent-Magnet Synchronous Motor with Stator-Resistance Estimation. IEEE Trans. Ind. Electron. 2007, 54, 1664–1675. [Google Scholar] [CrossRef]
- Kim, H.-S.; Kim, K.-H.; Youn, M.-J. On-Line Dead-Time Compensation Method Based on Time Delay Control. IEEE Trans. Control Syst. Technol. 2003, 11, 279–285. [Google Scholar]
- Kim, H.-W.; Youn, M.-J.; Cho, K.-Y.; Kim, H.-S. Nonlinearity Estimation and Compensation of PWM VSI for PMSM under Resistance and Flux Linkage Uncertainty. IEEE Trans. Control Syst. Technol. 2006, 14, 589–601. [Google Scholar]
- Liu, K.; Zhu, Z.Q.; Zhang, Q.; Zhang, J. Influence of Nonideal Voltage Measurement on Parameter Estimation in Permanent-Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2012, 59, 2438–2447. [Google Scholar] [CrossRef]
- Feng, G.; Lai, C.; Mukherjee, K.; Kar, N.C. Current Injection-Based Online Parameter and VSI Nonlinearity Estimation for PMSM Drives Using Current and Voltage DC Components. IEEE Trans. Transp. Electrif. 2016, 2, 119–128. [Google Scholar] [CrossRef]
- Shim, J.; Choi, H.; Ha, J.-I. Zero-Sequence Current Suppression with Dead-Time Compensation Control in Open-End Winding PMSM. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 3051–3056. [Google Scholar]
- Xu, L.; Zhu, Z.Q. Inverter Nonlinearity Compensation for Open-Winding Machine with Dual Switching Modes. IEEE J. Emerg. Sel. Top. Power Electron. 2022, accepted. [Google Scholar] [CrossRef]
- Guo, J.; Liu, X.; Li, S.; Sun, Q. Flux-Weakening Control for Variable Flux Reluctance Machine Considering the Second Order Harmonic in Phase Voltage. IEEE Trans. Energy Convers. 2021, 37, 1096–1105. [Google Scholar] [CrossRef]
- Shu, Z.; Lin, H.; Zhang, Z.; Yin, X.; Zhou, Q. Specific Order Harmonics Compensation Algorithm and Digital Implementation for Multi-Level Active Power Filter. IET Power Electron. 2016, 10, 525–535. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Current Direction | Switching State | S11 = 1 | S11 = 0 |
|---|---|---|---|
| ia > 0 | S21 = 1 | ||
| S21 = 0 | |||
| ia < 0 | S21 = 1 | ||
| S21 = 0 |
| Parameters | Value |
|---|---|
| Vce (Typical value) | 2.6 V |
| Vd (Typical value) | 3.2 V |
| Ton | 15 ns |
| Toff | 110 ns |
| td | 2 μs |
| VDC | 80 V |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Poles of stator, Ns | 6 | Vary component of stator inductance, Lδ | 24 mH |
| Poles of rotor, Nr | 4 | Rated speed | 1000 rpm |
| Phase resistance, Rs | 3Ω | Rated torque | 0.5 Nm |
| Constant component of stator inductance, Ls | 30 mH | Maximum current, imax | 2 A |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, J.; Liu, X.; Lu, K.; Zhu, Z. Parameter Identification of Variable Flux Reluctance Machines Excited by Zero-Sequence Current Accounting for Inverter Nonlinearity. Energies 2022, 15, 9287. https://doi.org/10.3390/en15249287
Guo J, Liu X, Lu K, Zhu Z. Parameter Identification of Variable Flux Reluctance Machines Excited by Zero-Sequence Current Accounting for Inverter Nonlinearity. Energies. 2022; 15(24):9287. https://doi.org/10.3390/en15249287
Chicago/Turabian StyleGuo, Jiaqiang, Xu Liu, Kaiyuan Lu, and Ziqiang Zhu. 2022. "Parameter Identification of Variable Flux Reluctance Machines Excited by Zero-Sequence Current Accounting for Inverter Nonlinearity" Energies 15, no. 24: 9287. https://doi.org/10.3390/en15249287
APA StyleGuo, J., Liu, X., Lu, K., & Zhu, Z. (2022). Parameter Identification of Variable Flux Reluctance Machines Excited by Zero-Sequence Current Accounting for Inverter Nonlinearity. Energies, 15(24), 9287. https://doi.org/10.3390/en15249287