

Improved Operation and Stability of a Wind-Hydro Microgrid by Means of a Li-Ion Battery Energy Storage


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- To develop a detailed dynamic model of the presented WH-MG along with the Li-ion BES.
- To size the Li-ion battery bank for the considered WH-MG.
- To design controllers to control the BES active power in WH and WO modes
- To test the performance of the modeled MG and designed controls through several simulation cases
- To show that the Li-ion BES increases the stability and operability of the presented WH-MG
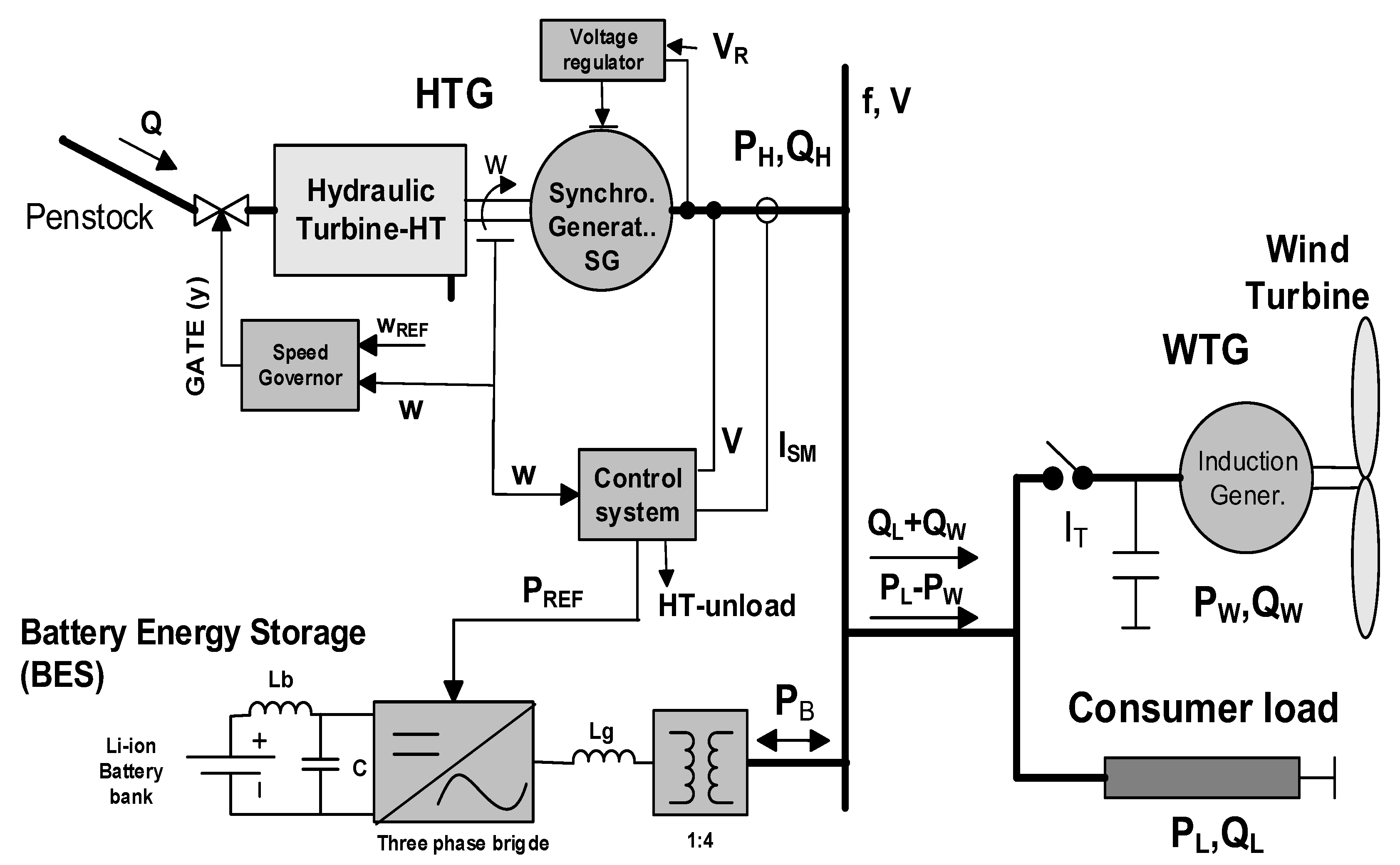
2. The Wind-Hydro Microgrid (WH-MG) Modeling
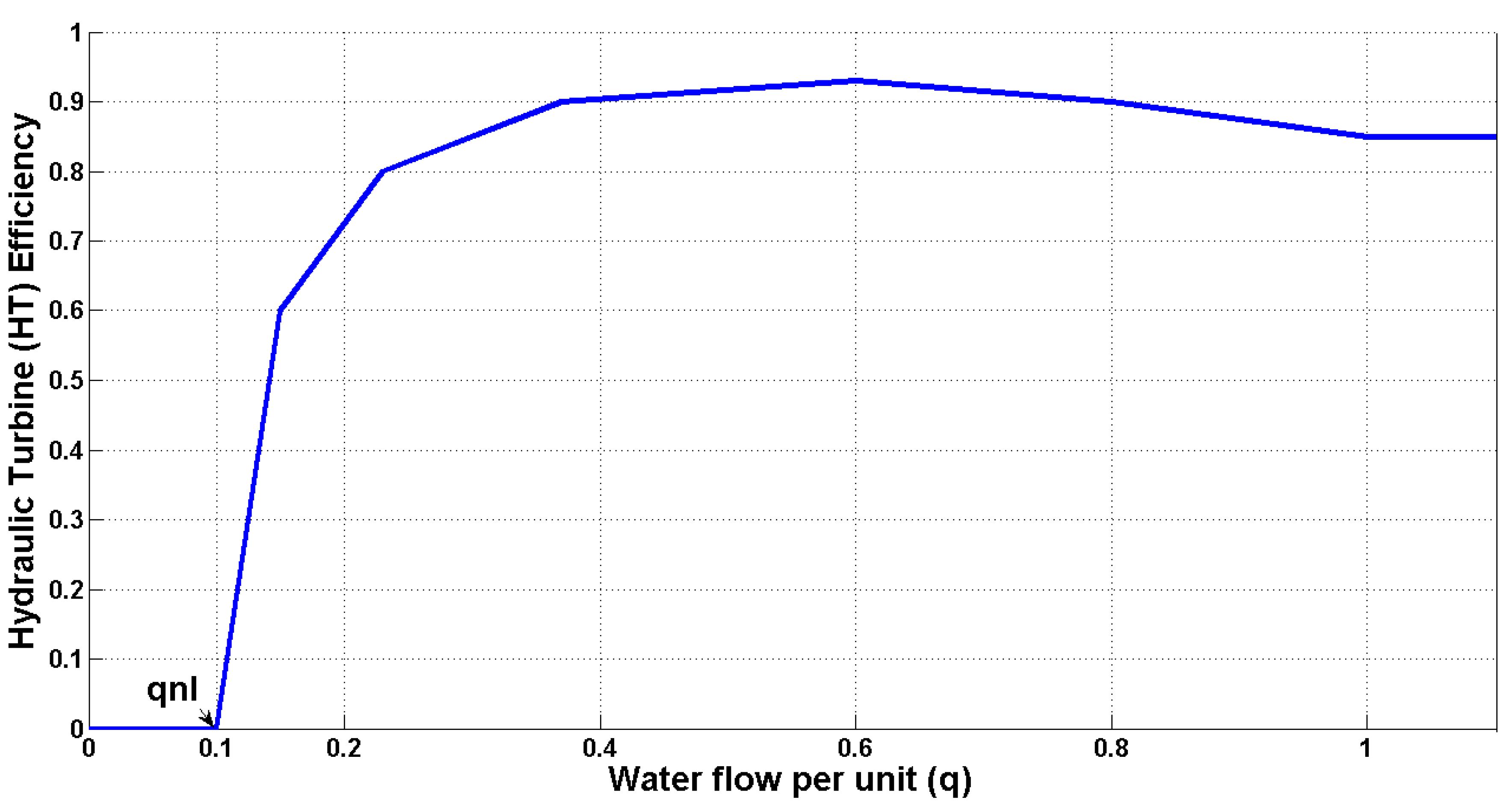
2.1. The Hydraulic Turbine (HT) Modelling
2.2. The Synchronous Generator (SG) Modelling
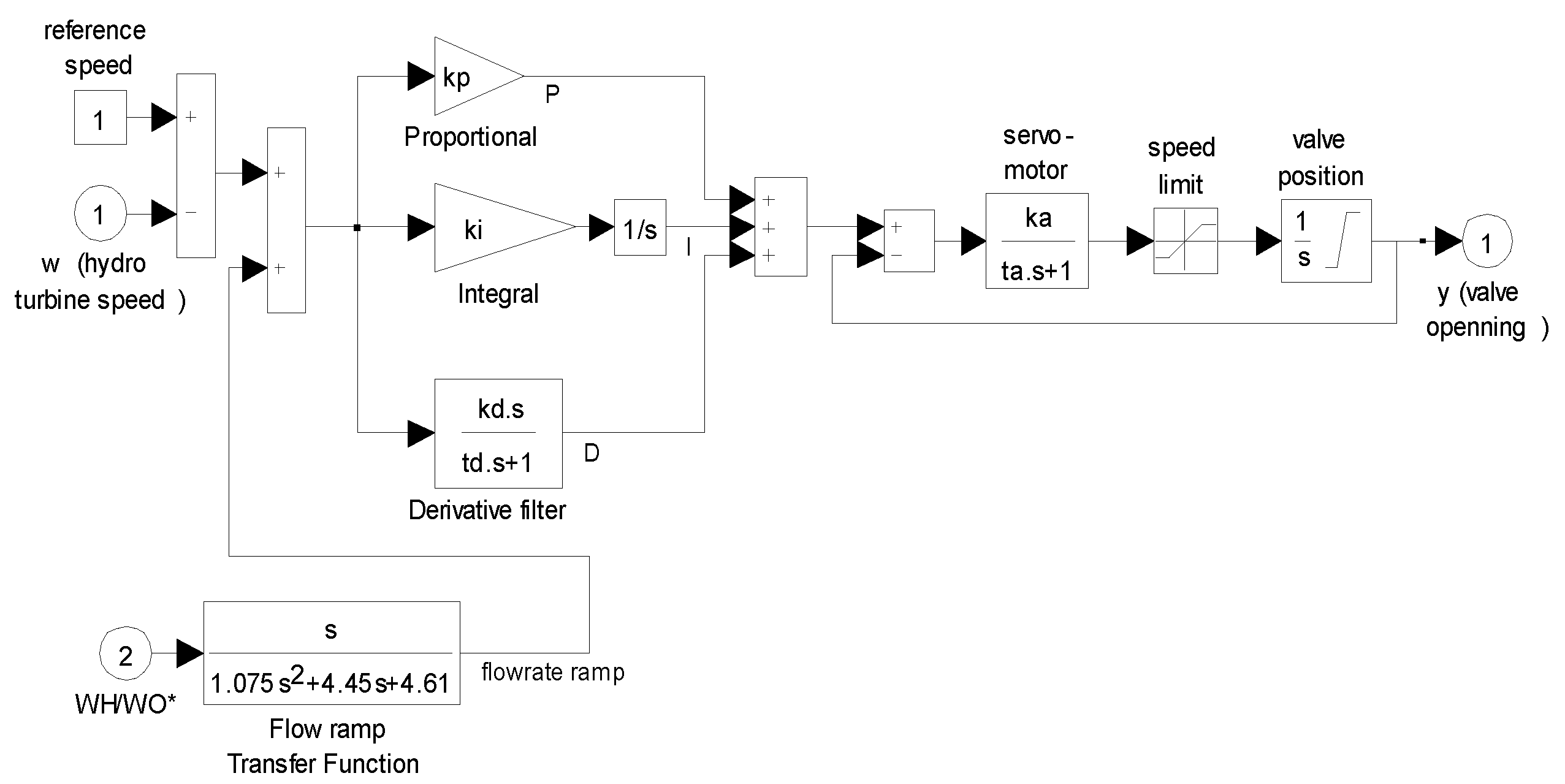
2.3. The Hydraulic Turbine Speed Governor Modelling
2.4. The Wind Turbine Generator (WTG) Modelling
2.5. The Li-Ion Battery Energy Storage (BES) Modelling
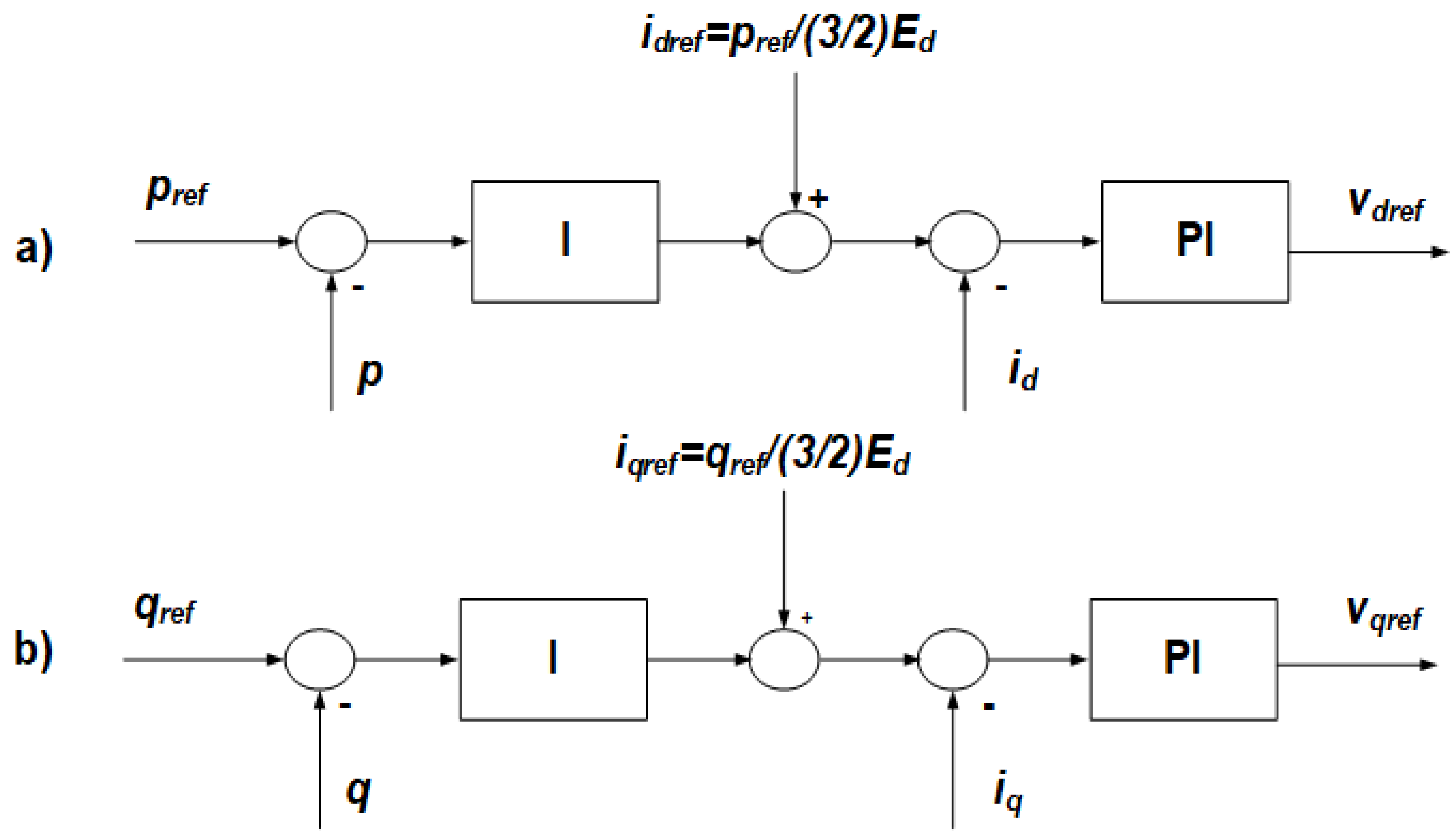
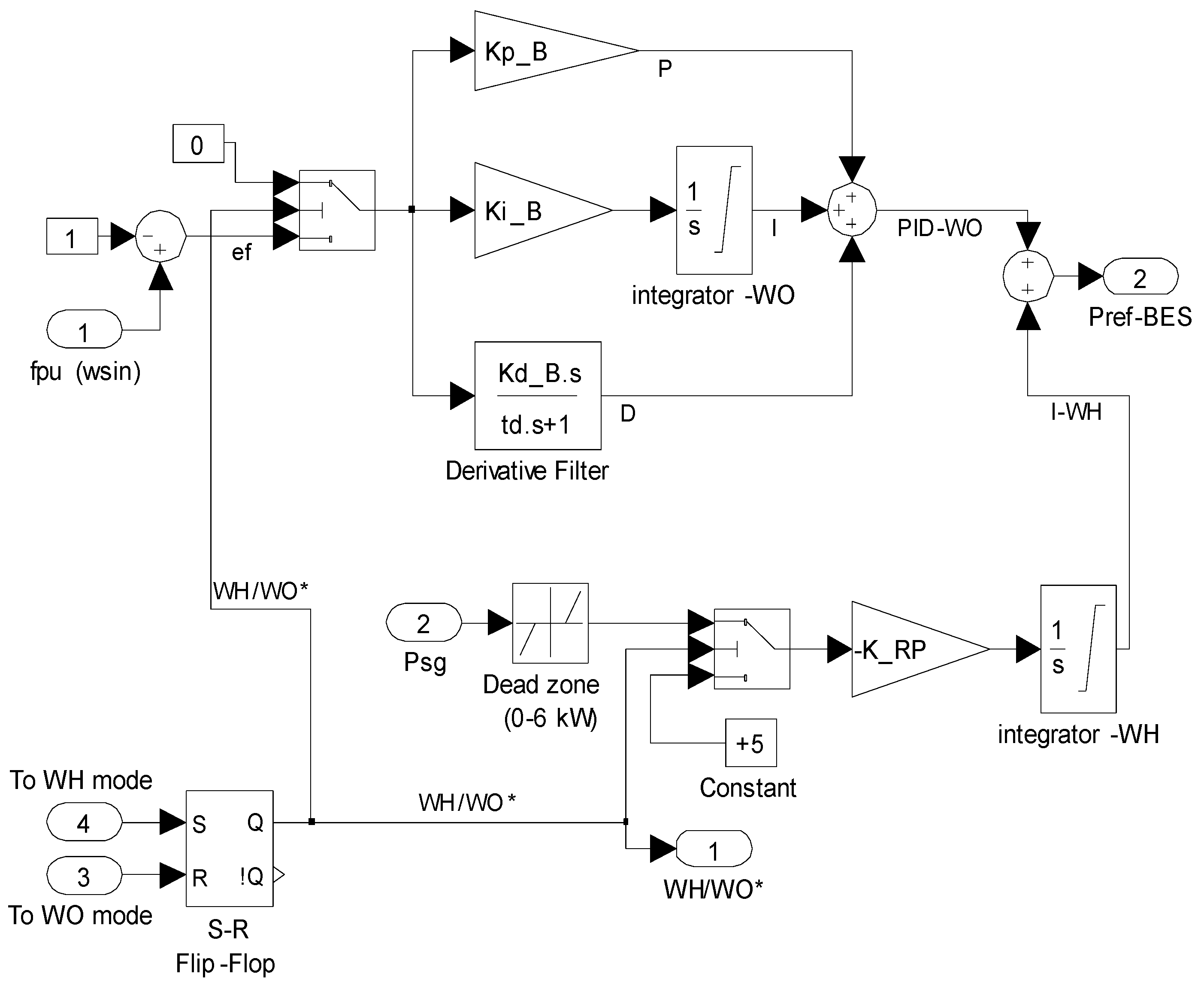
3. The Control of the BES Consumed/Supplied Power
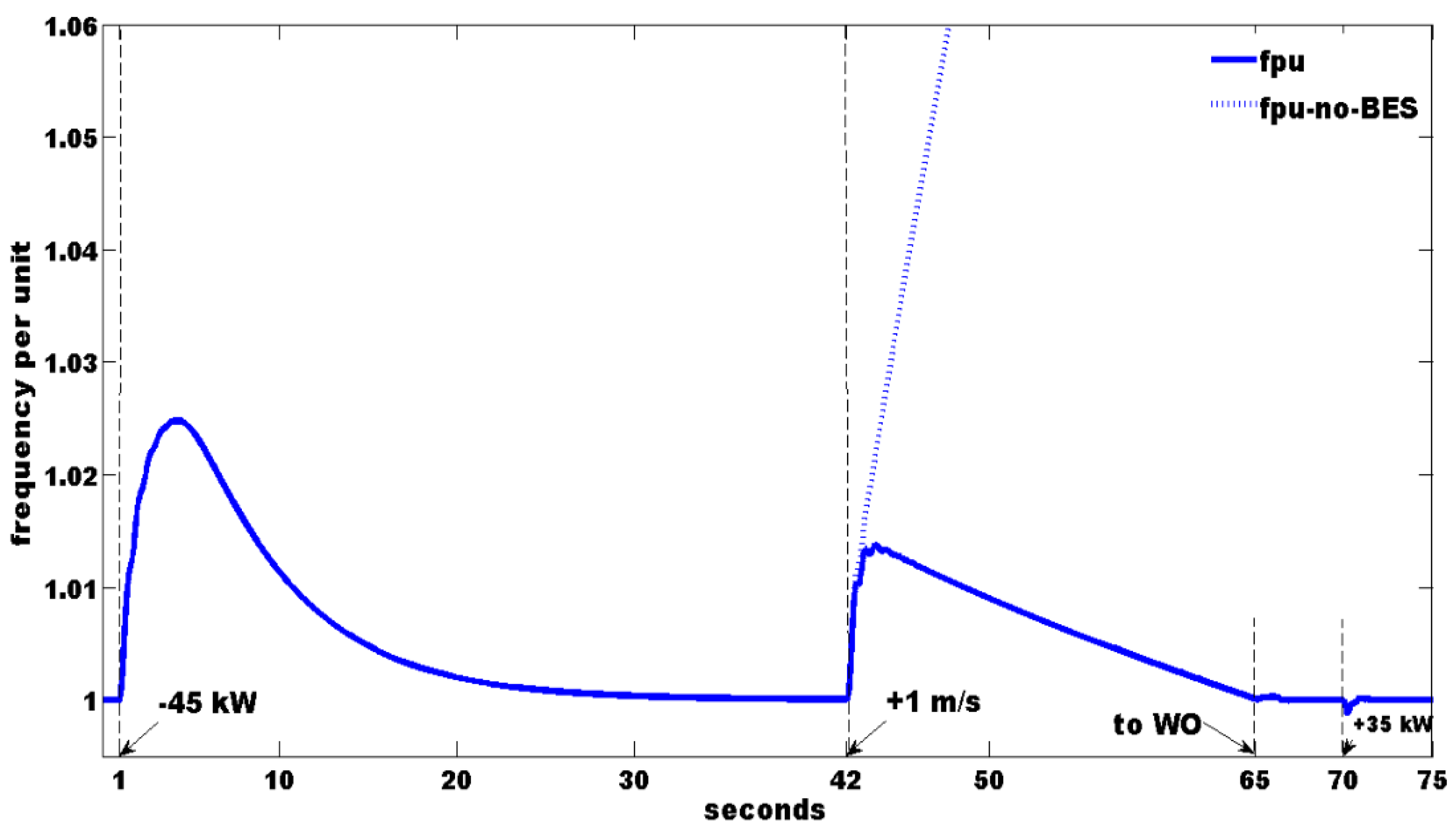
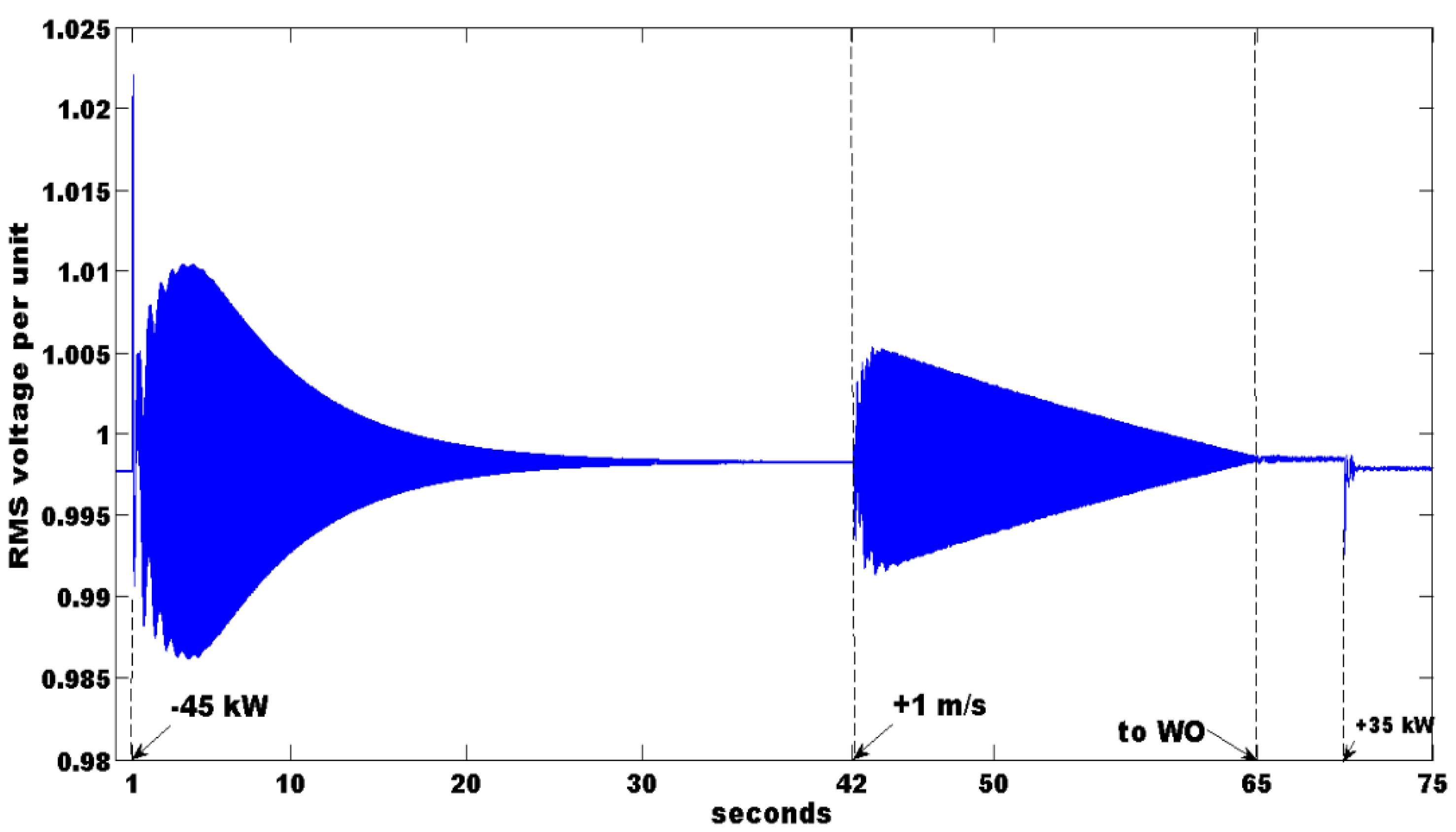
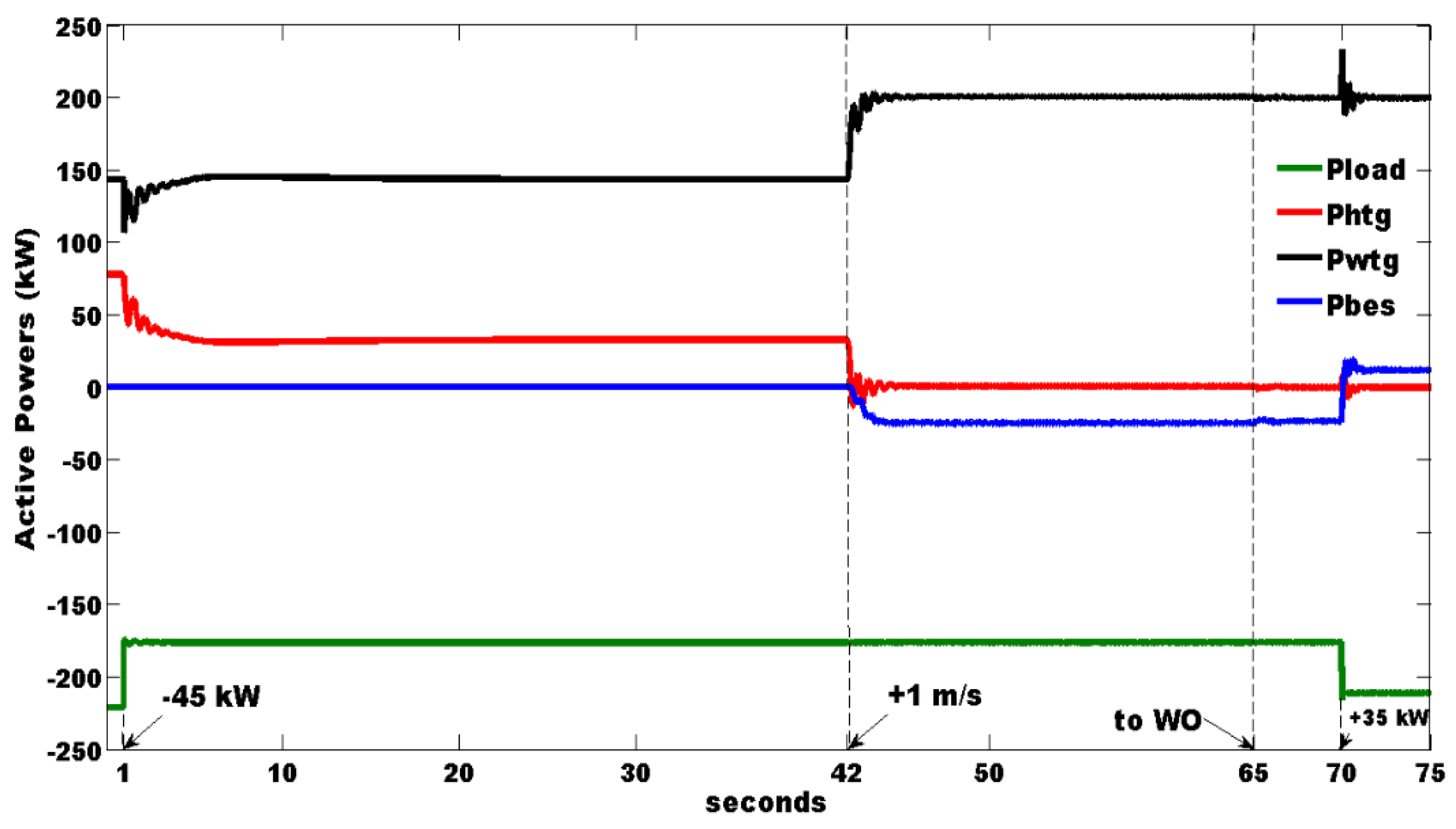
4. The Wind Hydro MicroGrid (WH-MG) Simulations
4.1. Wind-Hydro (WH) Mode Simulation
4.2. The HTG Reverse Power Scenario
4.3. The WH to WO Mode Transition
4.4. The Wind Only (WO) Mode Simulation
5. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| BES | battery energy storage |
| DG | diesel generator |
| DL | Dump Load |
| ESS | Energy storage system |
| HT | hydraulic turbine |
| HTG | hydraulic turbine generator |
| IG | Induction Generator |
| MG | Microgrid |
| SG | synchronous generator |
| WH-MG | Wind hydro microgrid |
| WH-MG operation modes | Hydro Only (HO), Wind Hydro (WH), Wind Only (WO) |
| WT | Wind Turbine |
| WTG | Wind Turbine Generator |
Appendix A. System Parameters
References
- Piagi, P.; Lasseter, R.H. Autonomous Control of Microgrids. In Proceedings of the IEEE PES Meeting, Montreal, QC, Canada, 18–22 June 2006. [Google Scholar] [CrossRef]
- Prasenjit, B.; Chowdhury, S.; Halder nee Dey, S.; Chowdhury, S.P. A literature review on integration of distributed energy resources in the perspective of control, protection and stability of microgrid. Renew. Sustain. Energy Rev. 2012, 16, 5545–5556. [Google Scholar] [CrossRef]
- Hirsch, A.; Parag, Y.; Guerrero, J. Microgrids: A review of technologies, key drivers, and outstanding issues. Renew. Sustain. Energy Rev. 2018, 90, 402–411. [Google Scholar] [CrossRef]
- Elmetwaly, H.; ElDesouky, A.A.; Omar, A.I.; Saad, M.A. Operation control, energy management, and power quality enhancement for a cluster of isolated microgrids. Ain Shams Eng. J. 2022, 13, 101737. [Google Scholar] [CrossRef]
- Sebastián, R. Review on Dynamic Simulation of Wind Diesel Isolated Microgrids. Energies 2021, 14, 1812. [Google Scholar] [CrossRef]
- Gil-González, W.; Montoya, O.D.; Garces, A. Modeling and control of a small hydro-power plant for a DC microgrid. Electr. Power Syst. Res. 2020, 180, 106104. [Google Scholar] [CrossRef]
- Sebastián, R.; Quesada, J. Modeling and simulation of an isolated wind Hydro Power System. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 4169–4174. [Google Scholar] [CrossRef]
- Sebastian, R. Simulation of the transition from Wind only mode to Wind Diesel mode in a no-storage Wind Diesel System. IEEE Lat. Am. Trans. 2009, 7, 539–544. [Google Scholar] [CrossRef]
- Sebastián, R.; Nevado, A. Study and Simulation of a Wind Hydro Isolated Microgrid. Energies 2020, 13, 5937. [Google Scholar] [CrossRef]
- Lukasievicz, T.; Oliveira, R.; Torrico, C. A Control Approach and Supplementary Controllers for a Stand-Alone System with Predominance of Wind Generation. Energies 2018, 11, 411. [Google Scholar] [CrossRef]
- Sebastián, R. Application of a battery energy storage for frequency regulation and peak shaving in a wind diesel power system. IET Gener. Transm. Distrib. 2016, 10, 764–770. [Google Scholar] [CrossRef]
- Sebastián, R.; Peña-Alzola, R.; Quesada, J. Simulation of a wind diesel power system with flywheel energy storage. In Proceedings of the 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 19–21 June 2017; pp. 2115–2120. [Google Scholar] [CrossRef]
- Hasmaini, M.; Hazlie, M.; Bakar, A.H.; Ping, H.W. A Review on Islanding Operation and Control for Distribution Network Connected with Small Hydro Power Plant. Renew. Sustain. Energy Rev. 2011, 15, 3952–3962. [Google Scholar] [CrossRef]
- Canary Government. Anuario Energético de Canarias 2016; Consejería de Economía, Industria, Comercio y Conocimiento: Santa Cruz de Tenerife, Spain, 2017. [Google Scholar]
- Sarasúa, J.; Martínez-Lucas, G.; Platero, C.; Sánchez-Fernández, J. Dual Frequency Regulation in Pumping Mode in a Wind–Hydro Isolated System. Energies 2018, 11, 2865. [Google Scholar] [CrossRef]
- Sarasúa, J.; Martínez-Lucas, G.; Lafof, M. Analysis of Alternative Frequency Control Schemes for Increasing Renewable Energy Penetration in El Hierro Island Power System. Int. J. Electr. Power Energy Syst. 2019, 113, 807–823. [Google Scholar] [CrossRef]
- Coban, H.H.; Rehman, A.; Mousa, M. Load Frequency Control of Microgrid System by Battery and Pumped-Hydro Energy Storage. Water 2022, 14, 1818. [Google Scholar] [CrossRef]
- Briongos, F.; Platero, C.A.; Sánchez-Fernández, J.A.; Nicolet, C. Evaluation of the Operating Efficiency of a Hybrid Wind–Hydro Powerplant. Sustainability 2020, 12, 668. [Google Scholar] [CrossRef]
- Canales, F.A.; Beluco, A.; Mendes, C.A.B. A comparative study of a wind hydro hybrid system with water storage capacity: Conventional reservoir or pumped storage plant? J. Energy Storage 2015, 4, 96–105. [Google Scholar] [CrossRef]
- Working Group Prime Mover and Energy Supply. Hydraulic turbine and turbine control models for system dynamic studies. IEEE Trans. Power Syst. 1992, 7, 167–179. [Google Scholar] [CrossRef]
- Paish, O. Small Hydro Power: Technology and Current Status. Renew. Sustain. Energy Rev. 2002, 6, 537–556. [Google Scholar] [CrossRef]
- Simscape Electrical™ Libraries. Available online: https://es.mathworks.com/products/simscape-electrical.html (accessed on 24 October 2022).
- Platero, C.A.; Nicolet, C.; Sánchez, J.A.; Kawkabani, B. Increasing Wind Power Penetration in Autonomous Power Systems Through No-Flow Operation of Pelton Turbines. Renew. Energy 2014, 68, 515–523. [Google Scholar] [CrossRef]
- Kothari, D.P.; Nagrath, I.J. Modern Power System Analysis; Tata McGraw-Hill Education: New York, NY, USA, 2003. [Google Scholar]
- Hansen, A.; Jauch, C.; Sørensen, P.; Iov, F.; Blaabjerg, F. Dynamic Wind Turbine Models in Power System Simulation Tool DIgSILENT; Report Risø-R-1400(EN); Risø National Laboratory: Roskilde, Denmark, 2003. Available online: https://www.osti.gov/etdeweb/servlets/purl/20437623 (accessed on 24 October 2022).
- Rodríguez-Amenedo, J.L.; Burgos-Díaz, J.C.; Arnalte-Gómez, S. Sistemas Eólicos de Producción de Energía Eléctrica; Rueda: Madrid, Spain, 2003; ISBN 9788472071391. [Google Scholar]
- Gagnon, R.; Saulnier, B.; Sybille, G.; Giroux, P. Modeling of a Generic High-Penetration No-Storage Wind-Diesel System Using Matlab Power System Blockset. In Proceedings of the 2002 Global Windpower Conference, Paris, France, 2–5 April 2002. [Google Scholar]
- Knudsen, H.; Nielsen, J.N. Introduction to the Modeling of Wind Turbines. In Wind Power in Power Systems; Wiley: Chicester, UK, 2005; pp. 525–585. [Google Scholar]
- Battery University. BU-107: Comparison Table of Secondary Batteries. Available online: https://batteryuniversity.com/article/bu-107-comparison-table-of-secondary-batteries (accessed on 4 July 2022).
- Hannan, M.A.; Wali, S.B.; Ker, P.J.; Rahman, M.S.A.; Mansor, M.; Ramachandaramurthy, V.K.; Muttaqi, K.M.; Mahlia, T.M.I.; Dong, Z.Y. Battery energy-storage system: A review of technologies, optimization objectives, constraints, approaches, and outstanding issues. J. Energy Storage 2021, 42, 103023. [Google Scholar] [CrossRef]
- Sebastián, R.; Alzola, R.P. Simulation of an isolated Wind Diesel System with battery energy storage. Electr. Power Syst. Res. 2011, 81, 677–686. [Google Scholar] [CrossRef]
- Sebastián, R.; Peña-Alzola, R. Study and simulation of a battery based energy storage system for wind diesel hybrid systems. In Proceedings of the 2012 IEEE International Energy Conference and Exhibition (ENERGYCON), Florence, Italy, 9–12 September 2012; pp. 563–568. [Google Scholar] [CrossRef]
- Rezkallah, M.; Chandra, A. Wind diesel battery hybrid system with power quality improvement for remote communities. In Proceedings of the IEEE Industry Applications Society Annual Meeting (IAS), Orlando, FL, USA, 9–13 October 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Krata, J.; Saha, T.K. Real-Time Coordinated Voltage Support with Battery Energy Storage in a Distribution Grid Equipped with Medium-Scale PV Generation. IEEE Trans. Smart Grid. 2019, 10, 3486–3497. [Google Scholar] [CrossRef]
- Tremblay, O.; Dessaint, L.-A.; Dekkiche, A.-I. A generic battery model for the dynamic simulation of hybrid electric vehicles. In Proceedings of the Vehicle Power and Propulsion Conference, VPPC 2007, Arlington, TX, USA, 9–12 September 2007; pp. 284–289. [Google Scholar] [CrossRef]
- Bindner, H.; Cronin, T.; Lundsager, P.; Manwell, J.F.; Abdulwahid, U.; Baring-Gould, I. Lifetime Modelling of Lead Acid Batteries; Risø National Laboratory Report; Risø National Laboratory: Roskilde, Denmark, April 2005; 81p, ISBN 87-550-3441-1. [Google Scholar]
- Battery University. BU-808: How to Prolong Lithium-based Batteries. Battery University. Last Updated: 3-Nov-2021. Available online: https://batteryuniversity.com/article/bu-808-how-to-prolong-lithium-based-batteries (accessed on 24 October 2022).
- Xu, B.; Oudalov, A.; Ulbig, A.; Andersson, G.; Kirschen, D.S. Modeling of Lithium-Ion Battery Degradation for Cell Life Assessment. IEEE Trans. Smart Grid 2018, 9, 1131–1140. [Google Scholar] [CrossRef]
- Margaris, I.D.; Papathanassiou, S.A.; Hatziargyriou, N.D.; Hansen, A.D.; Sorensen, P. Frequency Control in Autonomous Power Systems with High Wind Power Penetration. IEEE Trans. Sustain. Energy 2012, 3, 189–199. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sebastián, R. Improved Operation and Stability of a Wind-Hydro Microgrid by Means of a Li-Ion Battery Energy Storage. Energies 2022, 15, 9230. https://doi.org/10.3390/en15239230
Sebastián R. Improved Operation and Stability of a Wind-Hydro Microgrid by Means of a Li-Ion Battery Energy Storage. Energies. 2022; 15(23):9230. https://doi.org/10.3390/en15239230
Chicago/Turabian StyleSebastián, Rafael. 2022. "Improved Operation and Stability of a Wind-Hydro Microgrid by Means of a Li-Ion Battery Energy Storage" Energies 15, no. 23: 9230. https://doi.org/10.3390/en15239230
APA StyleSebastián, R. (2022). Improved Operation and Stability of a Wind-Hydro Microgrid by Means of a Li-Ion Battery Energy Storage. Energies, 15(23), 9230. https://doi.org/10.3390/en15239230