
Effects of Negative Sequence Voltage Subharmonics on Cage Induction Motors




Abstract
1. Introduction
2. Sequence of Voltage Subharmonics
3. Methodology
4. Results
4.1. Preliminary Remarks
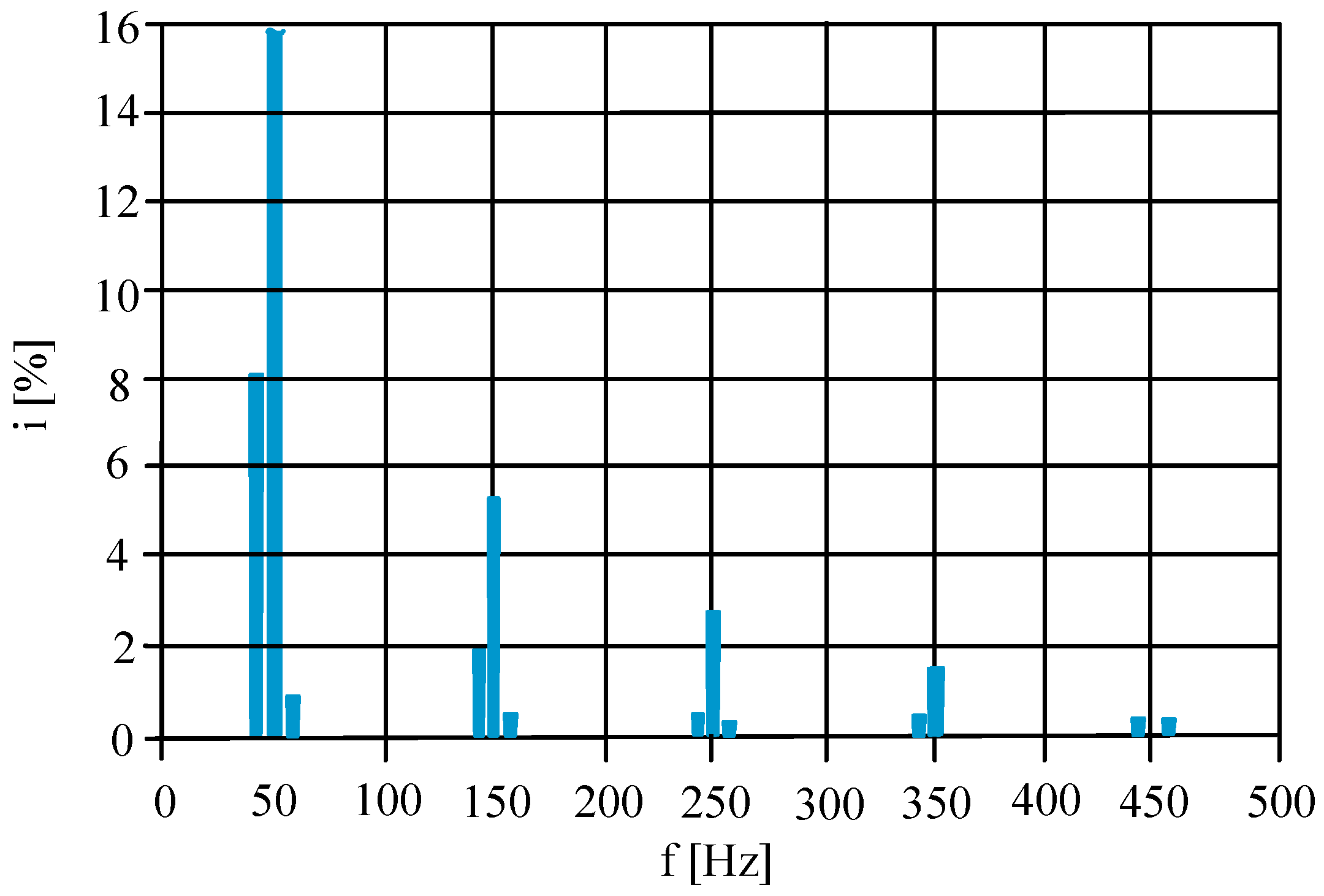
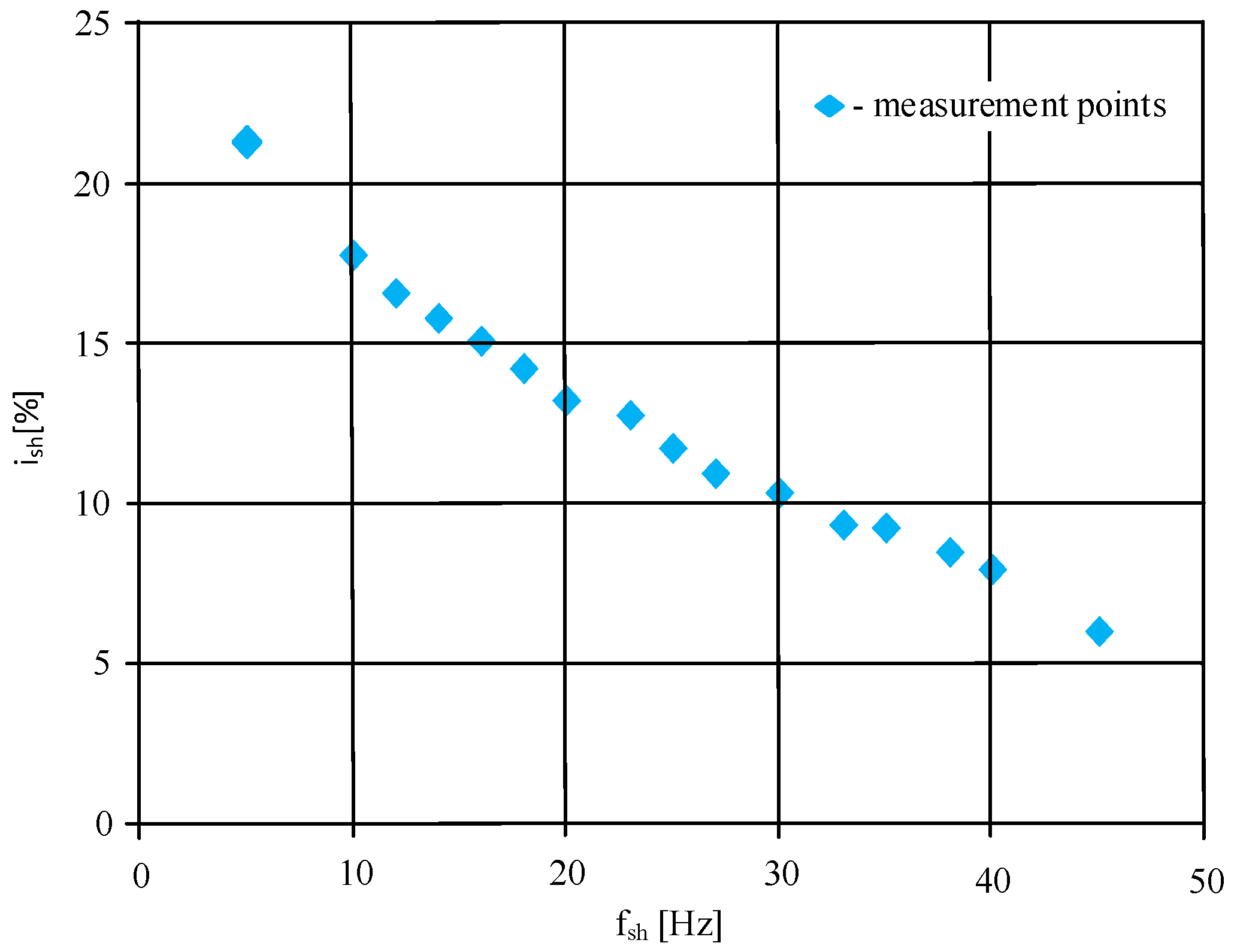
4.2. Effect of Negative Sequence Subharmonics on Currents
4.3. Torque Pulsations under Negative Sequence Subharmonics
4.4. Vibration under Negative Sequence Subharmonics
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Crotti, G.; D’Avanzo, G.; Letizia, P.S.; Luiso, M. Measuring harmonics with inductive voltage transformers in presence of subharmonics. IEEE Trans. Instrum. Meas. 2021, 70, 1–13. [Google Scholar] [CrossRef]
- Gnaciński, P.; Pepliński, M.; Murawski, L.; Szeleziński, A. Vibration of induction machine supplied with voltage containing subharmonics and interharmonics. IEEE Trans. Energy Convers. 2019, 34, 1928–1937. [Google Scholar] [CrossRef]
- Testa, A.; Langella, R. Power system subharmonics. In Proceedings of the IEEE Power Engineering Society General Meeting, San Francisco, CA, USA, 16–16 June 2005; Volume 3, pp. 2237–2242. [Google Scholar]
- Zhang, S.; Kang, J.; Yuan, J. Analysis and suppression of oscillation in V/F controlled induction motor drive systems. IEEE Trans. Transp. Electrif. 2022, 8, 1566–1574. [Google Scholar] [CrossRef]
- Bollen, M.H.J.; Gu, I.Y.H. Origin of power quality variations. In Signal Processing of Power Quality Disturbances; Wiley: New York, NY, USA, 2006; pp. 41–162. [Google Scholar]
- Wen, Z.; Peng, S.; Yang, J.; Deng, J.; He, H.; Wang, T. Analysis of the propagation characteristic of subsynchronousoscillationin wind integrated power system. Energies 2019, 12, 1081. [Google Scholar] [CrossRef]
- Xie, G.-L.; Zhang, B.-H.; Li, Y.; Mao, C.-X. Harmonic propagation and interaction evaluation between small-scale wind farms and nonlinear loads. Energies 2013, 6, 3297–3322. [Google Scholar] [CrossRef]
- Xie, X.; Zhang, X.; Liu, H.; Liu, H.; Li, Y.; Zhang, C. Characteristic analysis of subsynchronous resonance in practical wind farms connected to series-compensated transmissions. IEEE Trans. Energy Convers. 2017, 32, 1117–1126. [Google Scholar] [CrossRef]
- Pan, Y.; Sangwongwanich, A.; Yang, Y.; Blaabjerg, F.A. Phase-shifting MPPT method to mitigate interharmonics from cascaded H-bridge PV inverters. In Proceedings of the 2020 IEEE Applied Power Electronics Conference and Exposition (APEC), New Orleans, LA, USA, 15–19 March 2020; pp. 157–163. [Google Scholar]
- Ravindran, V.; Busatto, T.; Rönnberg, S.K.; Meyer, J.; Bollen, M.H.J. Time-varying interharmonics in different types of grid-tied PV inverter systems. IEEE Trans. Power Deliv. 2020, 35, 483–496. [Google Scholar] [CrossRef]
- Zhong, Q.; Qiu, Y.; Zhao, Y.; Li, H.; Wang, G.; Wen, F. Interharmonic Analysis Model of Photovoltaic Grid-connected System with Extended Dynamic Phasors. J. Mod. Power Syst. Clean Energy 2021, 9, 1540–1547. [Google Scholar] [CrossRef]
- Li, M.; Wang, X.; Tan, J. The analysis of interharmonics generated by VSI-fed adjustable speed drives considering mechanical load fluctuations. In Proceedings of the 2012 Power Engineering and Automation Conference, Wuhan, China, 18–20 September 2012; pp. 1–5. [Google Scholar]
- Nassif, A.B. Assessing the impact of harmonics and interharmonics of top and mudpump variable frequency drives in drilling rigs. IEEE Trans. Ind. Appl. 2019, 55, 5574–5583. [Google Scholar] [CrossRef]
- Soltani, H.; Davari, P.; Zare, F.; Blaabjerg, F. Effects of modulation techniques on the input current interharmonics of adjustable speed drives. IEEE Trans. Ind. Electron. 2018, 65, 167–178. [Google Scholar] [CrossRef]
- Testa, A.; Akram, M.F.; Burch, R.; Carpinelli, G.; Chang, G.; Dinavahi, V.; Hatziadoniu, C.; Grady, W.M.; Gunther, E.; Halpin, M.; et al. Interharmonics: Theory and modeling. IEEE Trans. Power Deliv. 2007, 22, 2335–2348. [Google Scholar] [CrossRef]
- Zhang, D.; Xu, W.; Liu, Y. On the phase sequence characteristics of interharmonics. IEEE Trans. Power Deliv. 2005, 20, 2563–2569. [Google Scholar] [CrossRef]
- Lin, F.; Lin, Y.; Huang, D.; Lin, C.; Zhang, Y. Ultra-High-Power Arc Furnace Model for Low Frequency Non-Stationary Inter-harmonics. In Proceedings of the 2020 5th Asia Conference on Power and Electrical Engineering (ACPEE), Chengdu, China, 4–7 June 2020; pp. 2049–2053. [Google Scholar]
- Arkkio, A.; Mölsä, E.; Holopainen, T.P. Reducing the losses of electrical machines under torsional vibration. In Proceedings of the 2018 XIII International Conferenceon Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 1303–1309. [Google Scholar]
- Zhiyuan, M.; Xiong, M.W.; Le, L.; Zhong, X. Interharmonics analysis of a 7.5 kW air compressor motor. CIRED Open Access Proc. J. 2017, 2017, 738–741. [Google Scholar] [CrossRef]
- Jardan, R.K.; Stumpf, P.; Bartal, P.; Varga, Z.; Nagy, I. A novel approach in studying the effects of subharmonics on ultrahigh-speed ac motor drives. IEEE Trans. Ind. Electron. 2010, 58, 1274–1281. [Google Scholar] [CrossRef]
- Tripp, H.; Kim, D.; Whitney, R. A comprehensive cause analysis of a coupling failure induced by torsional oscillations in a variable speed motor. In Proceedings of the 22nd Turbomachinery Symposium, College Station, TX, USA; 1993; pp. 17–24. [Google Scholar]
- Gallo, D.; Landi, C.; Langella, R.A.; Testa, A. Limits for low frequency interharmonic voltages: Can they be based on the flickermeter use. In Proceedings of the 2005 IEEE Russia Power Tech, St. Petersburg, Russia, 27–30 June 2005; pp. 1–7. [Google Scholar]
- Ghaseminezhad, M.; Doroudi, A.; Hosseinian, S.H.; Jalilian, A. High torque and excessive vibration on the induction motors under special voltage fluctuation conditions. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2021, 40, 822–836. [Google Scholar] [CrossRef]
- Tennakoon, S.; Perera, S.; Robinson, D. Flicker attenuation—Part I: Response of three-phase induction motors to regular voltage fluctuations. IEEE Trans. Power Deliv. 2008, 23, 1207–1214. [Google Scholar] [CrossRef]
- Barros, J.; de Apraiz, M.; Diego, R.I. Measurement of subharmonics in power voltages. In Proceedings of the Power Tech 2007 IEEE Conference, Lausanne, Switzerland, 1–5 July 2007; pp. 1736–1740. [Google Scholar]
- De Abreu, J.P.G.; Emanuel, A.E. Induction motor thermal aging caused by voltage distortion and imbalance: Loss of useful life and its estimated costs. IEEE Trans. Ind. Appl. 2002, 38, 12–20. [Google Scholar] [CrossRef]
- Farah M., J.; Abdollahi, R. An analytical investigation of induction motor behavior in the case of flicker occurrence using finite element method. Univ. Politeh. Buchar. Sci. Bull. Ser. C-Electr. Eng. Comput. Sci. 2019, 81, 181–192. [Google Scholar]
- Ghaseminezhad, M.; Doroudi, A.; Hosseinian, S.H.; Jalilian, A. Analysis of voltage fluctuation impact on induction motors by an innovative equivalent circuit considering the speed changes. IET Gener. Transm. Distrib. 2017, 11, 512–519. [Google Scholar] [CrossRef]
- Ghaseminezhad, M.; Doroudi, A.; Hosseinian, S.H.; Jalilian, A. Analytical field study on induction motors under fluctuated voltages. Iran. J. Electr. Electron. Eng. 2021, 17, 1620. [Google Scholar]
- Ghaseminezhad, M.; Doroudi, A.; Hosseinian, S.H.; Jalilian, A. An investigation of induction motor saturation under voltage fluctuation conditions. J. Magn. 2017, 22, 306–314. [Google Scholar] [CrossRef]
- Gnaciński, P.; Klimczak, P. High-Power induction motors supplied with voltage containing subharmonics. Energies 2020, 13, 5894. [Google Scholar] [CrossRef]
- Gnaciński, P.; Muc, A.; Pepliński, M. Influence of Voltage Subharmonics on Line Start Permanent Magnet Synchronous Motor. IEEE Access 2021, 9, 164275–164281. [Google Scholar] [CrossRef]
- Gnaciński, P.; Pepliński, M.; Hallmann, D.; Jankowski, P. The effects of voltage subharmonics on cage induction machine. Int. J. Electr. Power Energy Syst. 2019, 111, 125–131. [Google Scholar] [CrossRef]
- Gnaciński, P.; Pepliński, M.; Hallmann, D.; Jankowski, P. Induction cage machine thermal transients under lowered voltage quality. IET Electr. Power Appl. 2019, 13, 479–486. [Google Scholar] [CrossRef]
- Gnaciński, P.; Pepliński, M. Heating of induction cage machine supplied with voltage containing negative-sequence subharmonics. In Proceedings of the 2016 XXII International Conference on Electrical Machines (ICEM), Lausanne, Switzerland, 4–7 September 2016; pp. 1770–1775. [Google Scholar]
- Feese, T.; Ryan, M. Torsional vibration problem with motor/ID fan system due to PWM variable frequency drive. In Proceedings of the 37th Turbomachinery Symposium, Houston, TX, USA, 8–11 September 2008. [Google Scholar]
- EN Standard 50160; Voltage Characteristics of Electricity Supplied by Public Distribution Network. CELENEC: Brussels, Belgium, 2010.
- IEEE Standard 519-2014 (Revision of IEEE Standard 519-1992); IEEE Recommended Practice and Requirements for Harmonic Control in Electric Power Systems. IEEE: New York, NY, USA, 2014.
- Kuwałek, P.; Wiczyński, G. Dependence of Voltage Fluctuation Severity on Clipped Sinewave Distortion of Voltage. IEEE Trans. Instrum. Meas. 2021, 70, 1–8. [Google Scholar] [CrossRef]
- Ho, S.L.; Fu, W.N. Analysis of indirect temperature-rise tests of induction machines using time stepping finite element method. IEEE Trans. Energy Convers. 2001, 16, 55–60. [Google Scholar] [CrossRef]
- ISO Standard 20816-1; Mechanical Vibration—Measurement and Evaluation of Machine Vibration—Part 1: General Guidelines. ISO: Genova, Switzerland, 2016.
- Tarasiuk, T. Estimator-analyzer of power quality: Part I–Methods and algorithms. Meas. J. Int. Meas. Confed. 2011, 44, 238–247. [Google Scholar] [CrossRef]
- Tsypkin, M. Induction motor condition monitoring: Vibration analysis technique—diagnosis of electromagnetic anomalies. In Proceedings of the 2017 IEEE International Automatic Testing Conference, Schaumburg, IL, USA, 9–15 September 2017. [Google Scholar]
- Tsypkin, M. The origin of the electromagnetic vibration of induction motors operating in modern industry: Practical experience—Analysis and diagnostics. IEEE Trans. Ind. Appl. 2017, 53, 1669–1676. [Google Scholar] [CrossRef]
- ISO Standard 10816-1; Mechanical Vibration—Evaluation of Machine Vibration by Measurements on Non-Rotating Parts—Part 1: General Guidelines. ISO: Genova, Switzerland, 1995.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motor | Type | Rated Power (kW) | Rated Speed (rpm) | Rated Voltage (V) | Rated Current (A) |
|---|---|---|---|---|---|
| motor 1 | SLgm 315 ML2B | 200 | 2982 | 400 Δ | 346 |
| motor 2 | TSg100L-4B | 3 | 1420 | 380 Δ | 6.9 |
| motor 3 | 3SIE100L4B | 3 | 1465 | 400 Y | 6.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gnaciński, P.; Hallmann, D.; Klimczak, P.; Muc, A.; Pepliński, M. Effects of Negative Sequence Voltage Subharmonics on Cage Induction Motors. Energies 2022, 15, 8797. https://doi.org/10.3390/en15238797
Gnaciński P, Hallmann D, Klimczak P, Muc A, Pepliński M. Effects of Negative Sequence Voltage Subharmonics on Cage Induction Motors. Energies. 2022; 15(23):8797. https://doi.org/10.3390/en15238797
Chicago/Turabian StyleGnaciński, Piotr, Damian Hallmann, Piotr Klimczak, Adam Muc, and Marcin Pepliński. 2022. "Effects of Negative Sequence Voltage Subharmonics on Cage Induction Motors" Energies 15, no. 23: 8797. https://doi.org/10.3390/en15238797
APA StyleGnaciński, P., Hallmann, D., Klimczak, P., Muc, A., & Pepliński, M. (2022). Effects of Negative Sequence Voltage Subharmonics on Cage Induction Motors. Energies, 15(23), 8797. https://doi.org/10.3390/en15238797