

Design and Control of a Quasi-Z Source Multilevel Inverter Using a New Reaching Law-Based Sliding Mode Control

 ,
,  , , and
, , and 
Abstract
1. Introduction
- Analytical model of MCAEB qZSI is derived and simulated in MATLAB/Simulink. An SMC-based current controller is derived for the regulation of grid injected current. A control law is derived using a linear sliding mode-based surface and a novel reaching law to achieve faster convergence rate. The controller achieves robust behavior, fast response, and lower output current ripples under a variety of operating conditions.
- This paper proposes a fast-acting SVPWM in the gh frame of reference for the modulation of MCAEB qZSI multilevel inverters. The transformation of the reference signal from the dq to the gh frame of reference simplifies the calculation of the switching ratio between different inverter switching states. Its simple implementation and fast computational ability have an inherent advantage over traditional SVPWM techniques.
- The performance evaluation of the sliding mode control with a new reaching law under different operating conditions is investigated in terms of different parameters such as settling time, steady-state error, and THD. The results are then compared with classical controllers such as the proportional integrator (PI) controller in order to determine the effectiveness of the proposed controller for the proposed inverter.
2. Mathematical Model of Z Source Multilevel Inverter
2.1. Model of MCAEB Quasi-Z Source Network
2.2. NST State
2.3. ST State
2.4. Modulation
2.5. Sliding Mode Control
2.5.1. AC-Side Control
2.5.2. DC-Side Control
3. Results
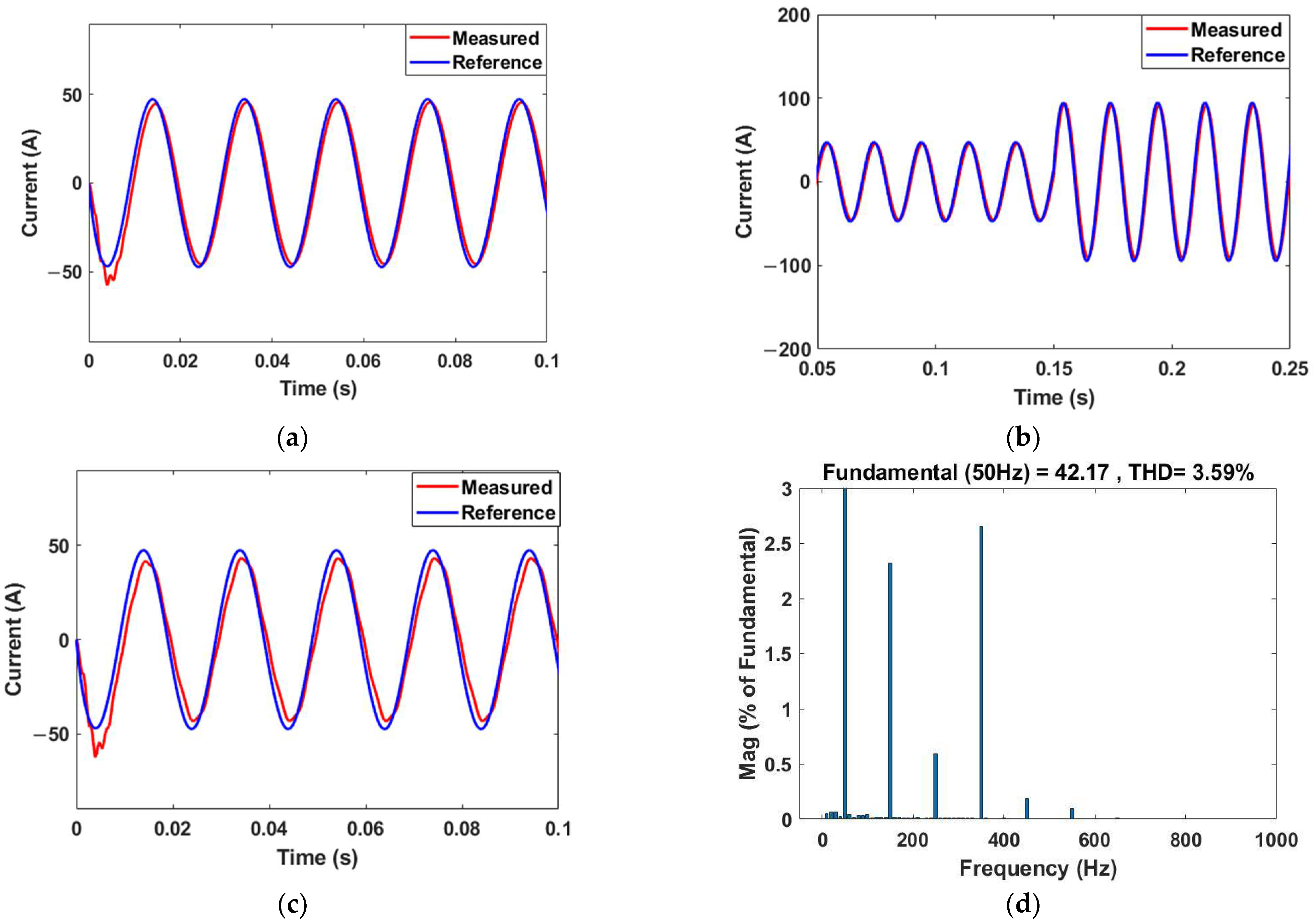
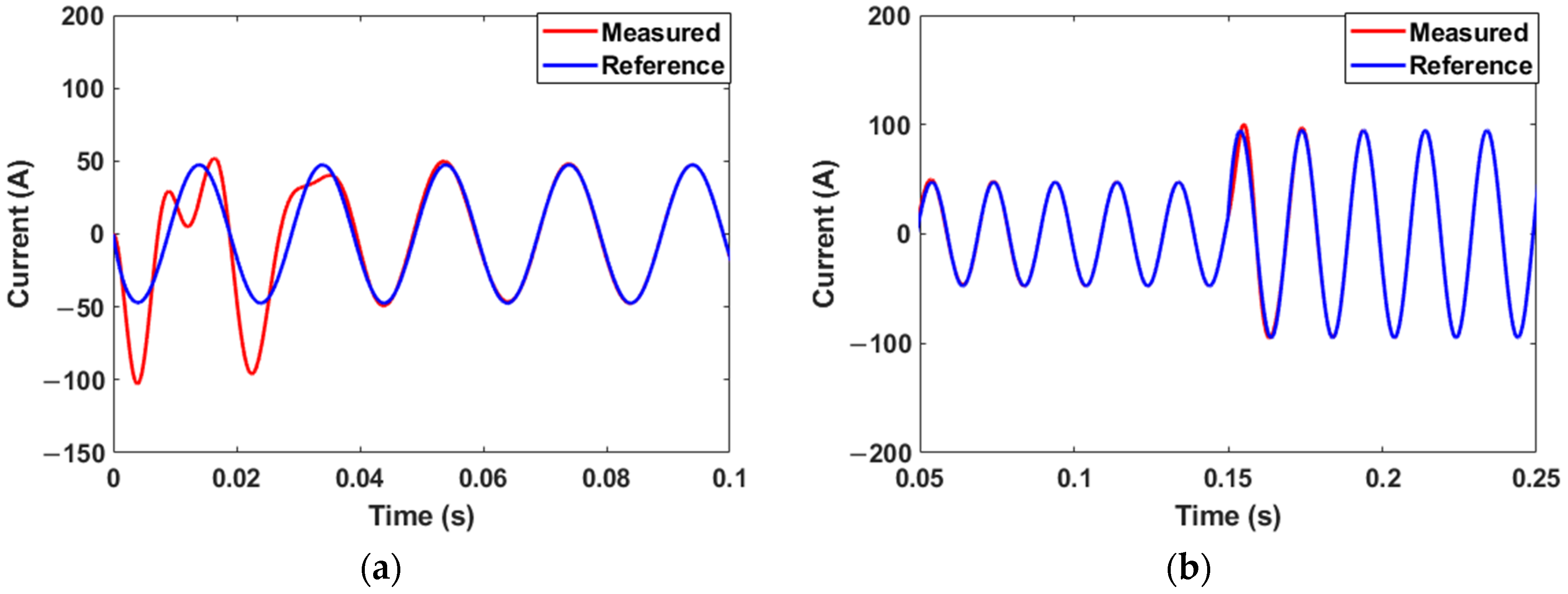
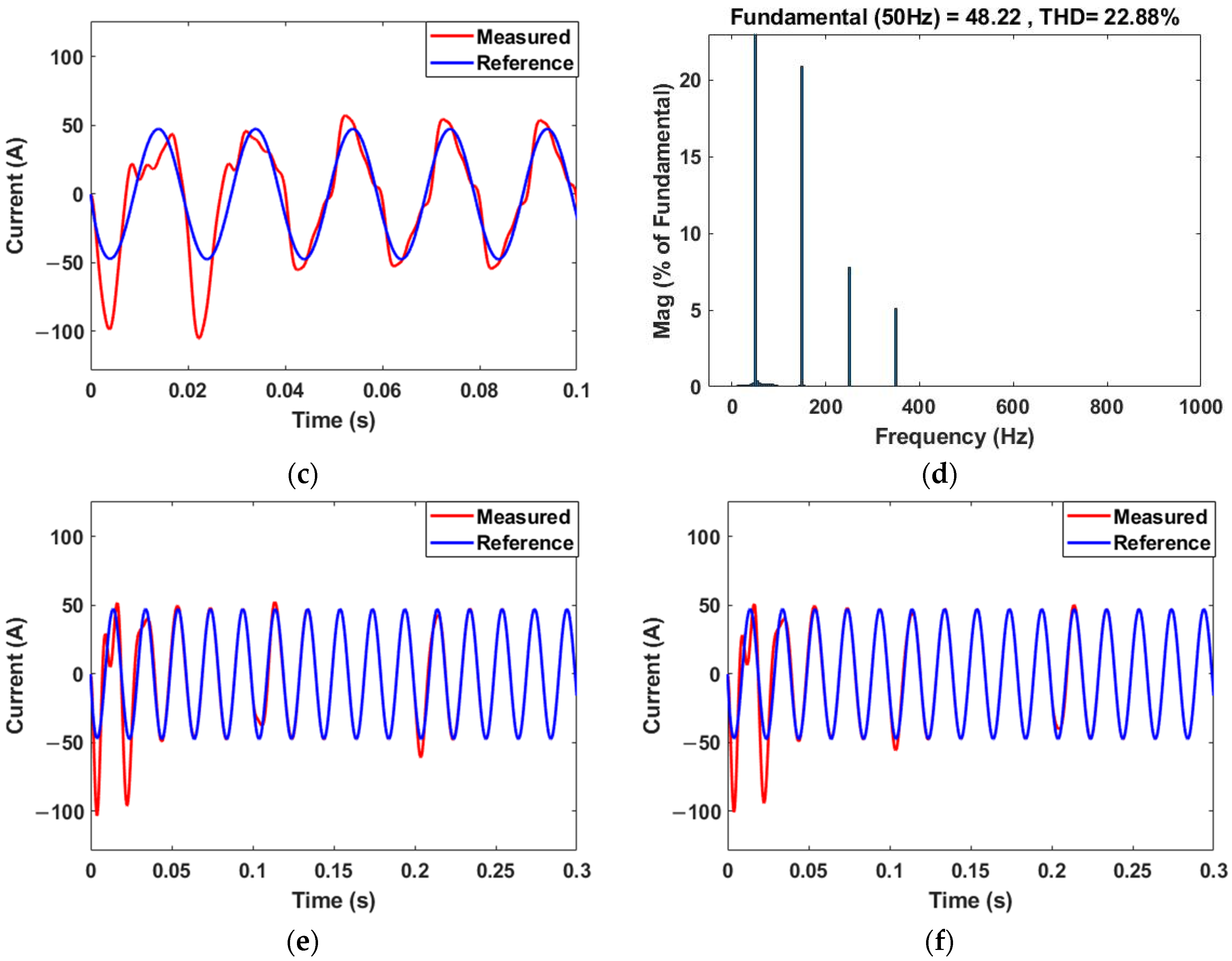
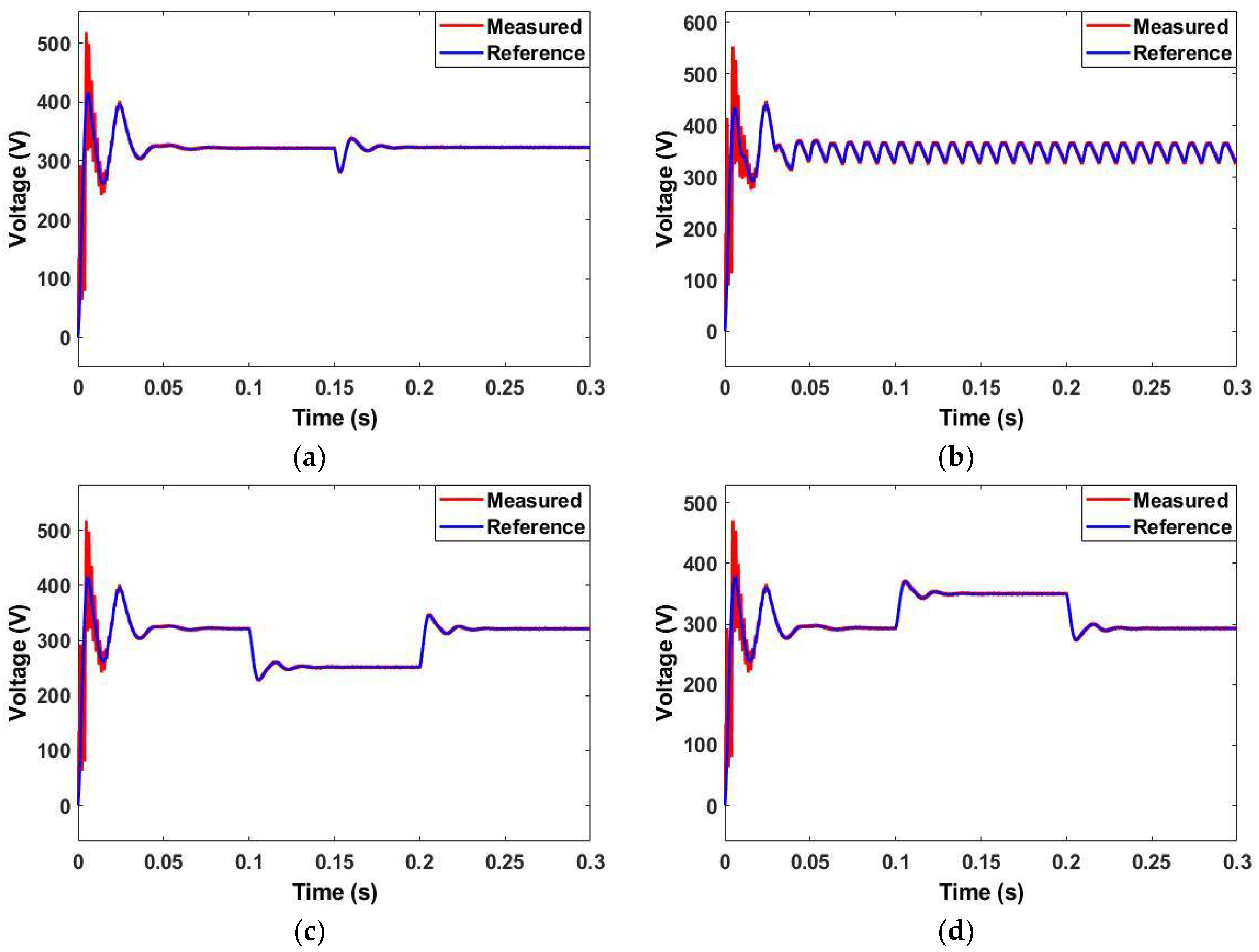
3.1. Simulation Results and Discussion
- Under normal grid operation (NGO), the grid voltage contains no harmonics. A pure sine wave of 230 Vrms with a frequency of 50 Hz is applied at the grid terminals. Moreover, the performance is also compared when a step input from 50 A to 100 A is introduced in the reference current at 0.15 s.
- Inverters are assumed to be controlled as an ideal source. Perturbations present in the grid current are the result of the nonlinear loads present in the grid. Under abnormal grid operation (AGO), low-order harmonic distortions, i.e., 5% of the third, fifth and seventh harmonics, are present at grid voltages of 250 Vpeak with a nominal frequency of 50 Hz.
- Under voltage sag conditions, the grid voltage drops from 230 Vrms magnitude to 180 Vrms between 0.1 s to 0.2 s. Similarly, the grid voltage rises from 210 Vrms to 250 Vrms under grid voltage swell conditions.
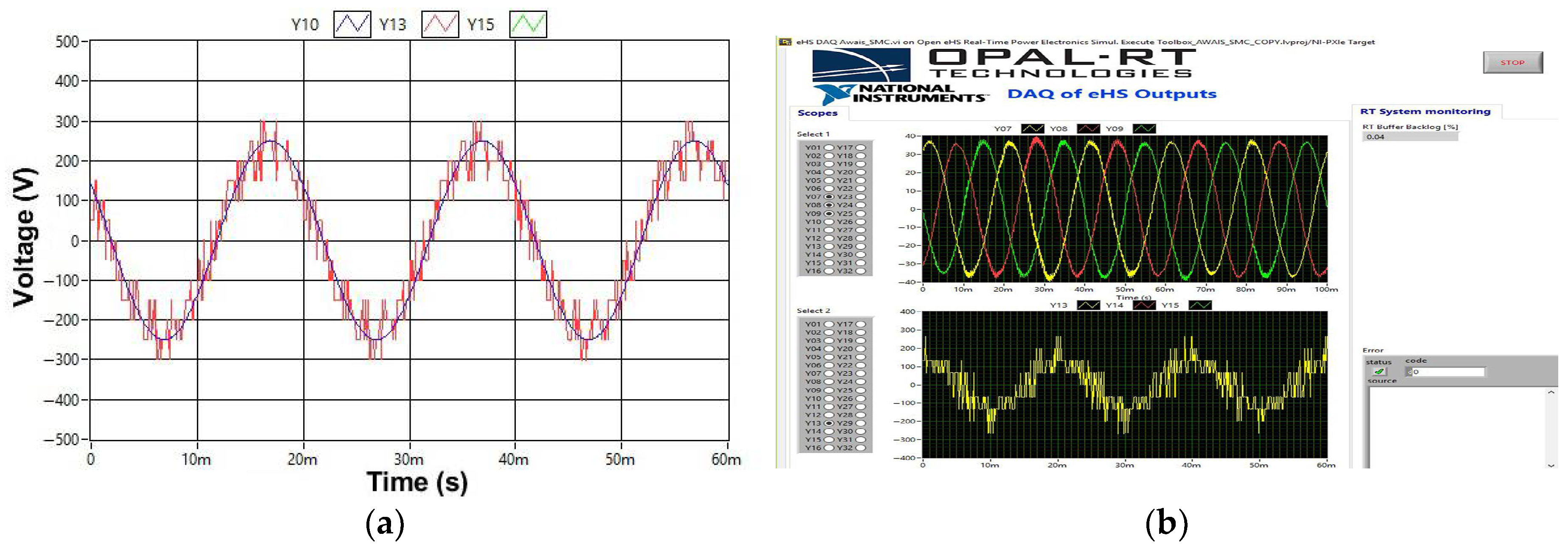
3.2. Experimental Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rahbar, K.; Chai, C.C.; Zhang, R. Energy Cooperation Optimization in Microgrids with Renewable Energy Integration. IEEE Trans. Smart Grid 2018, 9, 1482–1493. [Google Scholar] [CrossRef]
- Sakib, N.; Hossain, E.; Ahamed, S.I. A Qualitative Study on the United States Internet of Energy: A Step Towards Computational Sustainability. IEEE Access 2020, 8, 69003–69037. [Google Scholar] [CrossRef]
- Hor, C.-L.; Watson, S.J.; Majithia, S. Analyzing the impact of weather variables on monthly electricity demand. IEEE Trans. Power Syst. 2005, 20, 2078–2085. [Google Scholar] [CrossRef]
- An, L.; Duan, J.; Chow, M.-Y.; Duel-Hallen, A. A Distributed and Resilient Bargaining Game for Weather-Predictive Microgrid Energy Cooperation. IEEE Trans. Ind. Inform. 2019, 15, 4721–4730. [Google Scholar] [CrossRef]
- Dursun, M.K. LCL Filter Design for Grid Connected Three-Phase Inverter. In Proceedings of the 2nd International Symposium on Multidisciplinary Studies and Innovative Technologies (ISMSIT), Ankara, Turkey, 19–21 October 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Mandol, M.H.; Shuvra, P.B.; Hosain, M.K.; Samad, F.; Rahman, M.W. Novel Single Phase Multilevel Inverter Topology with Reduced Number of Switching Elements and Optimum THD Performance. In Proceedings of the 2019 International Conference on Electrical, Computer and Communication Engineering (ECCE), Cox’s Bazar, Bangladesh, 7–9 February 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Zhu, Y.; Guo, S.; Chen, L.; Yan, Q.; Ma, H.; Xie, X.; Zhang, W.; Yuan, X. A Novel Hybrid Cascaded Multilevel Inverter. In Proceedings of the 2018 IEEE International Power Electronics and Application Conference and Exposition (PEAC), Shenzhen, China, 4–7 November 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Xu, Z.; Zheng, X.; Lin, T.; Yao, J.; Ioinovici, A. Switched-capacitor multi-level inverter with equal distribution of the capacitors discharging phases. Chin. J. Electr. Eng. 2020, 6, 42–52. [Google Scholar] [CrossRef]
- Peng, F.Z.; Yuan, X.; Fang, X.; Qian, Z. Z-source inverter for adjustable speed drives. IEEE Power Electron. Lett. 2003, 1, 33–35. [Google Scholar] [CrossRef]
- Li, T.; Cheng, Q. A comparative study of Z-source inverter and enhanced topologies. CES Trans. Electr. Mach. Syst. 2018, 2, 284–288. [Google Scholar] [CrossRef]
- Ho, A.-V.; Chun, T.-W. Single-Phase Modified Quasi-Z-Source Cascaded Hybrid Five-Level Inverter. IEEE Trans. Ind. Electron. 2018, 65, 5125–5134. [Google Scholar] [CrossRef]
- Adle, R.; Renge, M.; Muley, S.; Shobhane, P. Photovoltaic Based Series Z-source Inverter fed Induction Motor Drive with Improved Shoot through Technique. Energy Procedia 2017, 117, 329–335. [Google Scholar] [CrossRef]
- Ahmad, A.; Bussa, V.K.; Singh, R.K.; Mahanty, R. Switched-Boost-Modified Z-Source Inverter Topologies with Improved Voltage Gain Capability. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 2227–2244. [Google Scholar] [CrossRef]
- Hemalatha, N.; Seyezhai, R. Modified Diode Assisted Extended Boost Quasi Z-Source Inverter for PV Applications. Circuits Syst. 2016, 7, 3271–3284. [Google Scholar] [CrossRef]
- Hemalatha, N.; Ramalingam, S. Modified Capacitor Assisted Extended Boost Quasi Z-Source Inverter for The Grid-Connected PV System. IIUM Eng. J. 2019, 20, 140–157. [Google Scholar] [CrossRef]
- Ahmad, A.; Singh, R.K.; Beig, A.R. Switched-Capacitor Based Modified Extended High Gain Switched Boost Z-Source Inverters. IEEE Access 2019, 7, 179918–179928. [Google Scholar] [CrossRef]
- Jagan, V.; Kotturu, J.; Das, S. Enhanced-Boost Quasi-Z-Source Inverters with Two-Switched Impedance Networks. IEEE Trans. Ind. Electron. 2017, 64, 6885–6897. [Google Scholar] [CrossRef]
- Rathore, S.; Kirar, M.; Bhardwaj, S.K. Simulation of Cascaded H-Bridge Multilevel Inverter Using PD, POD, APOD Techniques. Electr. Comput. Eng. Int. J. 2015, 4, 27–41. [Google Scholar] [CrossRef]
- Nair, R.; Mahalakshmi, R.; Thampatty, K.C.S. Performance of three phase 11-level inverter with reduced number of switches using different PWM techniques. In Proceedings of the International Conference on Technological Advancements in Power and Energy (TAP Energy), Kollam, India, 24–26 June 2015; pp. 375–380. [Google Scholar] [CrossRef]
- Yan, S.; Zhang, Q.; Du, H. A simplified SVPWM control strategy for PV inverter. In Proceedings of the 24th Chinese Control and Decision Conference (CCDC), Taiyuan, China, 23–25 May 2012; pp. 225–229. [Google Scholar] [CrossRef]
- Jayakumar, V.; Chokkalingam, B.; Munda, J.L. A Comprehensive Review on Space Vector Modulation Techniques for Neutral Point Clamped Multi-Level Inverters. IEEE Access 2021, 9, 112104–112144. [Google Scholar] [CrossRef]
- Celanovic, N.; Boroyevich, D. A fast space-vector modulation algorithm for multilevel three-phase converters. IEEE Trans. Ind. Appl. 2001, 37, 637–641. [Google Scholar] [CrossRef]
- Khan, A.; Hu, X.M.; Khan, M.A. Real-Time Implementation and Comparative Analysis of αβ and gh Reference Framed SVPWM Techniques for a Three-Level NPC Induction Motor Drive. In Proceedings of the 2018 IEEE PES/IAS PowerAfrica, Cape Town, South Africa, 28–29 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, Q.; Caldognetto, T.; Buso, S. Review and Comparison of Grid-Tied Inverter Controllers in Microgrids. IEEE Trans. Power Electron. 2020, 35, 7624–7639. [Google Scholar] [CrossRef]
- Athari, H.; Niroomand, M.; Ataei, M. Review and Classification of Control Systems in Grid-tied Inverters. Renew. Sustain. Energy Rev. 2017, 72, 1167–1176. [Google Scholar] [CrossRef]
- Piao, Z.; Guo, C.; Sun, S. Adaptive Backstepping Sliding Mode Dynamic Positioning System for Pod Driven Unmanned Surface Vessel Based on Cerebellar Model Articulation Controller. IEEE Access 2020, 8, 48314–48324. [Google Scholar] [CrossRef]
- Xu, B.; Ran, X. Sliding Mode Control for Three-Phase Quasi-Z-Source Inverter. IEEE Access 2018, 6, 60318–60328. [Google Scholar] [CrossRef]
- Xiu, C.; Guo, P. Global Terminal Sliding Mode Control with the Quick Reaching Law and Its Application. IEEE Access 2018, 6, 49793–49800. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Parameters of MCAEB qZSI, L, C | 0.254 mH, 131 µF |
| Switching frequency of inverter, fs | 100 kHz |
| Filter parameters, | 1.2 mH, 6 µF 1.2 mH |
| Sliding surface co-efficient, | −0.0012, −0.0012, 1.117 × 10−6 |
| Reaching law co-efficient, | 0.05, 0.002, 0.5 |
| Sliding surface co-efficient, | −85.8073, −0.0422, −16.707 |
| Sliding surface co-efficient, | −2.0174, −84.0342 |
| AC-side PI Gain, | −0.29837, −706.5122 |
| DC-side PI Gain, | −0.346536, −289.5905 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rafiq, M.A.; Ulasyar, A.; Uddin, W.; Zad, H.S.; Khattak, A.; Zeb, K. Design and Control of a Quasi-Z Source Multilevel Inverter Using a New Reaching Law-Based Sliding Mode Control. Energies 2022, 15, 8002. https://doi.org/10.3390/en15218002
Rafiq MA, Ulasyar A, Uddin W, Zad HS, Khattak A, Zeb K. Design and Control of a Quasi-Z Source Multilevel Inverter Using a New Reaching Law-Based Sliding Mode Control. Energies. 2022; 15(21):8002. https://doi.org/10.3390/en15218002
Chicago/Turabian StyleRafiq, Muhammad Awais, Abasin Ulasyar, Waqar Uddin, Haris Sheh Zad, Abraiz Khattak, and Kamran Zeb. 2022. "Design and Control of a Quasi-Z Source Multilevel Inverter Using a New Reaching Law-Based Sliding Mode Control" Energies 15, no. 21: 8002. https://doi.org/10.3390/en15218002
APA StyleRafiq, M. A., Ulasyar, A., Uddin, W., Zad, H. S., Khattak, A., & Zeb, K. (2022). Design and Control of a Quasi-Z Source Multilevel Inverter Using a New Reaching Law-Based Sliding Mode Control. Energies, 15(21), 8002. https://doi.org/10.3390/en15218002