1. Introduction
Nowadays, increasing load demand, increasing concerns about global warming, and the latest advancements in renewable energy technology have led to a new trend in electricity generation [
1,
2]. These new power generation systems are usually integrated into the power system at distribution networks and represent distributed energy resources (DERs) [
3,
4]. To fully utilize the evolving potential of DERs, recently the concept of microgrid has been presented to integrate them into electrical distribution networks (EDNs).
A microgrid (MG) is generally regarded as a small part of a power network which incorporates a significant number of distributed generations, besides local loads and energy storage devices [
5]. It is controlled and managed by intelligence and can operate in conjunction with the utility grid (grid-tied mode) in addition to being independent from the host grid (islanded mode). A MG is expected to guarantee a cost-effective service to the customer loads with superior quality and reliability in addition to the economical operation for its owner and auxiliary supply to the utility grid [
6,
7].
MGs have a high level of converter-interfaced DERs (CIDERs) penetration. The CIDERs have low inertia as compared to the rotating machines. The maximum current carrying capacity of CIDERs is limited, approximately two to three times that of rated current. This level of current is small as compared to the synchronous generators, which can provide current up to five to eight times their rated current [
8]. Consequently, a MG has three major operating scenarios: (1) a grid-tied mode; (2) islanded mode with CIDERs, and (3); islanded mode with both synchronous-based DERs (SBDERs) and CIDERs [
9].
MGs face significantly different levels of fault currents in each of the scenarios for a similar fault [
10]. Thus, the conventional protection schemes, which assume the radial structure, high fault current level, and single mode operation, are inadequate for the protection of MGs. They may face problems such as nuisance tripping, blinding of protection, miss-coordination, and sensitivity loss if used for MGs [
11]. Therefore, modifications in the traditional protection philosophies or new protection schemes are required to protect MGs.
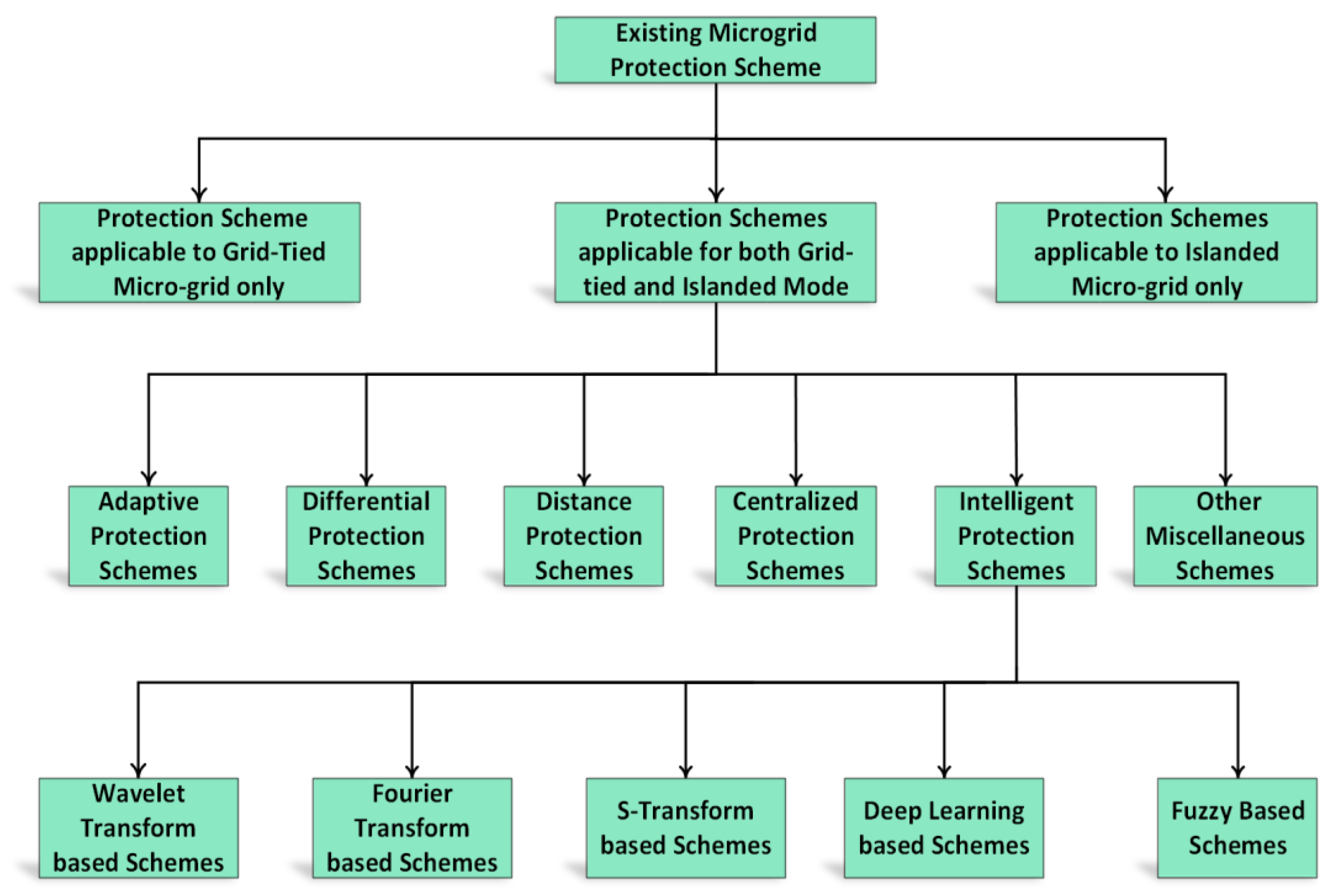
Various MG protection schemes have been developed and reported in the literature. A schematic classification of the existing MG protection schemes is shown in
Figure 1. In ref. [
12], the authors presented an intelligent agent-based protection strategy for radial and closed-loop distribution networks involving DERs. Communication links were developed between IEDs. The scheme was advantageous over traditional protection schemes as it offered higher speed backup protection. However, the scheme was prone to communication failure and was overall uneconomical. The authors in [
13] developed a three-stage adaptive protection scheme for MGs. In the first and second stages, offline and online calculations of relay settings with DERs were performed, respectively. However, in the third stage, the adaptive relay settings were used for real-time protection of MGs. In ref. [
14], a hybrid scheme based on adaptive and differential protection was presented. The seamless switching between the two schemes was obtained by a communication-assisted proactive process. In ref. [
15], a communication-aided adaptive protection scheme has been presented to protect the islanded medium voltage CIDERs-based MG. The IEDs were employed to measure the current and voltage waveform. The current signal was used to detect the faults, while the voltage signal, along with the current signal, was used to identify the direction of faults in the islanded MG. In ref. [
16], Oureilidi and Konstantinos protected the MGs by interchanging the control system of the converter. The faulty part was recognized by evaluating the fault current supplied by each converter. The authors in [
17] developed a CPU-based centralized scheme to protect the radial and looped MGs in grid-tied and islanded modes of operations. All protection functions such as detection, location, classification, and trip signal generation were performed in the CPU. The trip signals were sent to relevant circuit breakers by the communication links. The fault components of positive sequence current and impedance were used for fault detection and fault location, respectively. A similar configuration was used for MG protection in [
18]. However, the faults were detected using a combination of over-current and under-voltage relays. The fault location was achieved in two steps. In the first step, three buses closest to the fault point were selected by comparing the positive sequence voltage of all buses. Finally, the fault location index was calculated for all of the lines connected to the three buses; the line with a negative fault index was considered to be a faulty line.
The above-mentioned protection strategies cannot protect the MGs in all operating scenarios. The schemes that can protect MGs in all operating scenarios need a communication medium and synchronized measurement. Therefore, recently, many intelligent and signal processing-based MG protection strategies have been developed against various types of faults. In ref. [
19], a statistical classifier-based differential protection strategy has been presented for islanded MGs. Several features from current and voltage signals were extracted at both terminals of a line in MGs. A data mining method was employed to pick the most suitable features. Finally, a differential operator was utilized to the selected features to identify and locate the faulty events in MGs. A time-frequency-based differential protection strategy has been presented in [
20] for medium voltage MG with loop and radial network and CIDERs. In the suggested strategy, initially, the currents at both ends of the line were retrieved. Then, the spectral energy content of S-transform-based contours was computed. After that, the differential energy was obtained by calculating the difference of spectral energy computed at both ends of a line. The scheme was upgraded in [
21] by suggesting the Hilbert-Huang transform for the calculation of the spectral energy instead of the s-transform due to the benefits of the Hilbert-Huang transform. In ref. [
22], the initial travelling wave of current was extracted by mathematical morphology to identify the faults and their location. The scheme was used for islanded MG only. The authors in [
23] used the wavelet transform to obtain the high-frequency components of current and voltage signals for radial MG protection. F. Costa et al. [
24] developed a boundary wavelet transform-based protection for MGs. The time delay and instantaneous elements of the relay were calculated in the wavelet domain. A modified over-current relay was then employed to detect the faults in the grid-tied MG. In ref. [
25], features were extracted by discrete wavelet transform. The extracted features were input into a data mining algorithm to detect and classify the faults in MGs. In ref. [
6], the authors extracted various hidden features by using a matching pursuit algorithm. The extracted features were then provided to four different classifiers for fault detection and classification. Naive Bayes classifiers, along with the decision tree, were utilized to distinguish the faults in an islanded MG [
26]. The authors in [
9] used an interval type-2 fuzzy inference system to develop a new protection scheme for MG. Various fuzzy rules were defined for fault detection and fault direction identification. In ref. [
1], a convolutional neural network-based protection scheme was presented for MGs. The scheme did not necessitate any external feature extractor for the intelligent classifier. Three different convolutional neural network structures were developed for fault detection, location, and classification. In ref. [
27], discrete wavelet transform was employed to extract several fault features from the current signal; the deep neural network was then used to detect and classify the faults in MGs.
The above-presented protection schemes provided protection against various types of faults in MGs. However, each scheme has some limitations; some of the schemes only provided protection in one operating scenario. The scheme which provided protection in all scenarios required a communication medium, and hence was prone to communication failure. Additionally, some methods are only applicable to inverter-based DERs. Therefore, it is vital to design a new protection scheme for MGs that upholds its performance for all types of faults and operating conditions and DERs.
This paper presents a novel fast and intelligent strategy (NIPS) for the protection of MGs with multiple DERs against fault. The proposed NIPS uses EWT and LSTM to develop fault type, phase, and location information. First, the three-phase current signals are measured and sampled at the relay point. Next, the EWT, which is an adaptive time-frequency transform, is employed to decompose the current signals into EMs. Afterwards, several statistical features are extracted from the EMs. Later, the extracted features, along with the three-phase current measurements, are input into three different LSTMs for developing fault type, phase, and location information. Finally, based on the developed fault information, a trip signal is sent to the appropriate circuit breaker to isolate the faulty section from the rest of the MG. The main contributions of the paper are as follows:
Intelligent Protection Strategy: A NIPS based on empirical wavelet EWT and LSTM is proposed that can protect MGs in all operating scenarios against short-circuit and high impedance faults.
Adaptive Feature Extraction: Unlike existing protection schemes, the proposed scheme extracts the features from the fault signals using signal-adaptive filter banks. The wavelet filter banks in the EWT are built based on the information contained in the input signals.
Communication-independent Strategy: The scheme does not require any communication networks for fault detection, classification or location, and it can be applied to any MG without significant modifications.
The rest of the paper is organized as follows:
Section 2 and
Section 3 provide the details of EWT and LSTM. The proposed NIPS is presented in
Section 4.
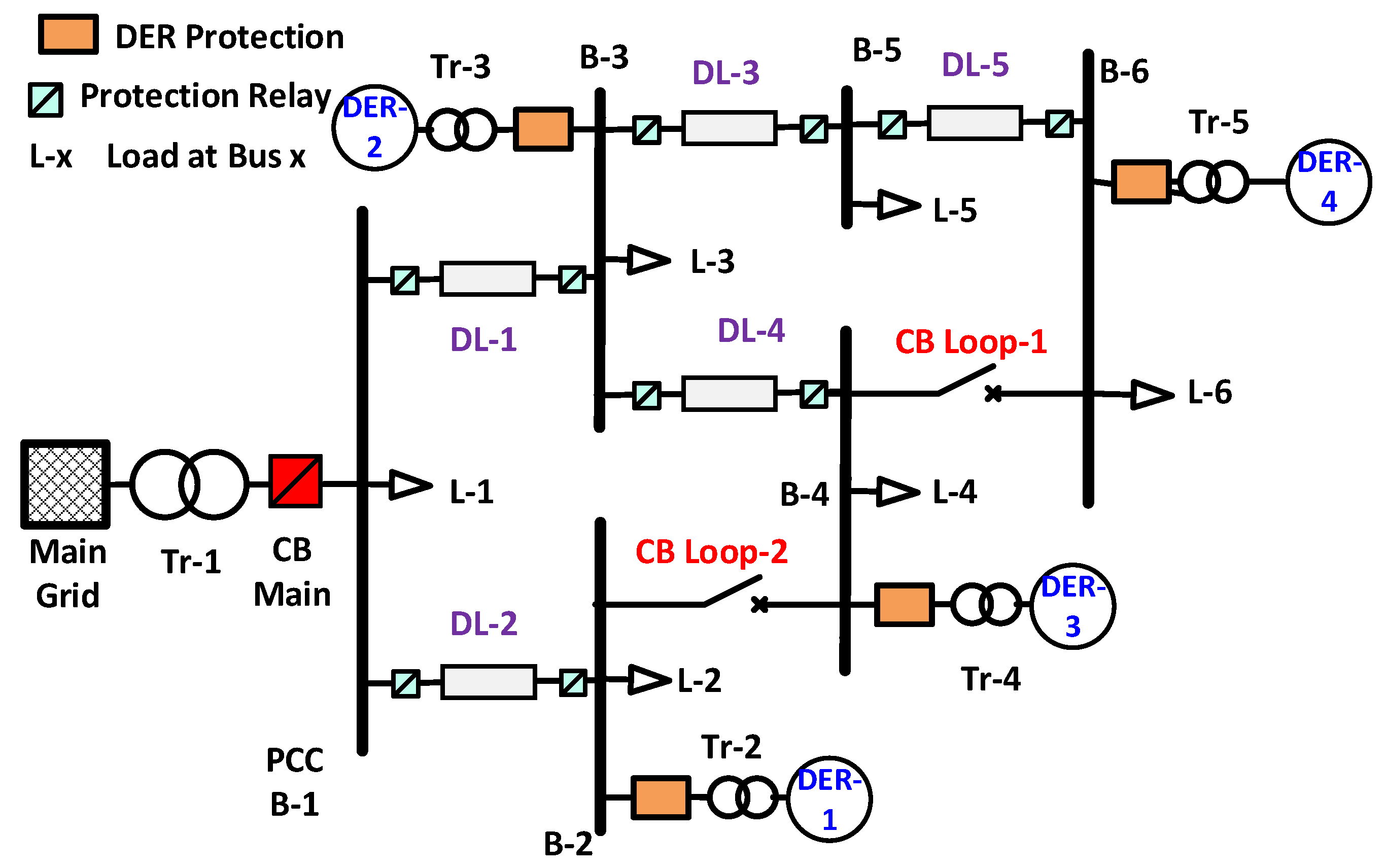
Section 5 provides the test system and fault data generation. Simulation results are presented in
Section 6. Finally, the paper is synopsized in
Section 7.
2. Empirical Wavelet Transform for Fault Signal Decomposition
The fault signals in the power system are non-stationary. Therefore, it is worthwhile to use time-frequency analyzing techniques to obtain the most appropriate features. In this study, the EWT transform is used to extract useful features from the three-phase current signals. The EWT is an adaptive non-stationary time-frequency analysis tool which decomposes a signal into EMs/frequency sub-bands [
28,
29]. Unlike a conventional wavelet transform, the EWT uses the information of the analyzed signal to design signal adaptive wavelet filters.
The three-phase current signals sampled by the protective relay are used as input to the EWT. The EWT is applied to each phase current independently. In EWT, firstly, the Fourier spectrum of the input signal is obtained. Then, the obtained Fourier spectrum is divided into
N adjacent segments using the EWT boundary detection method. Afterwards, the empirical wavelets are defined as a band-pass filter on each segment by using the concept of Littlewoods-Paley and Meyer’s wavelet. Next, the empirical wavelets and scaling functions are obtained by using the following equations [
28]:
where
ω is the frequency;
and
ξ are the parameters which ensure that the empirical wavelet and scaling functions form a compact frame. These parameters are obtained by using the equations given in ref. [
28]. Afterwards, the approximation and detail coefficients are determined from the inner product of the phase current with its corresponding wavelet and scaling functions.
Finally, these coefficients are utilized to obtain the EMs from the phase current.
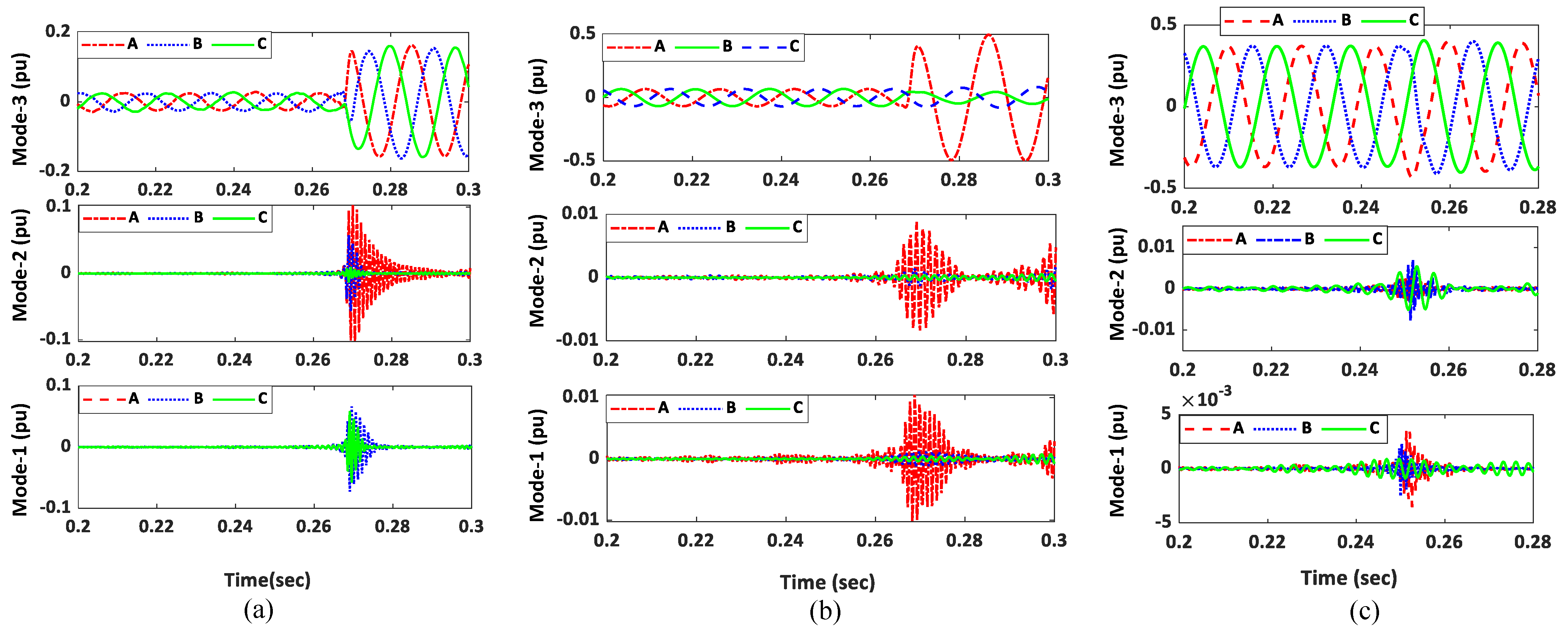
In this study, the first three EMs were used since most of the signal information is available in these modes. The result of the EWT decomposition of the three-phase current signal during a three-phase fault is shown in
Figure 2a. It can be observed from the figure that the variation in the EMs is significant during the fault. The EWT sub-bands of the three-phase current signal for unbalanced faults (AG) are shown in
Figure 2b. The figure shows a significant variation in the EMs of the faulty phase (A-phase) as compared to the healthy phases (B and C phase).
Figure 2c shows the EMs of three-phase current when a capacitor bank is switched at 0.25 s. It can be observed from the results show that there are some variations in the EMs. However, these variations are minimal compared to the fault cases.
From the above results, it can be concluded that the EWT decomposition can be applied to the fault signals for effective feature extraction. The adaptive nature of EWT can be useful to process the power system signals not only for transient analysis but also for estimation purposes.
4. Proposed Protection Strategy
This paper proposes a NIPS for MGs using three-phase current data. The NIPS employs EWT and LSTM networks to develop fault information. The proposed NIPS has the ability to protect the looped and radial MGs against all types of short-circuit and high impedance faults in all operating scenarios. Firstly, the proposed NIPS takes three-phase currents at a relay as input. Then, the input signal at the relay point is processed through a second-order low-pass Butterworth filter with a cut-off frequency of 1500 Hz for antialiasing. The reason of selecting the value of 1500 Hz is that the 25th harmonic is the highest component of interest in the power system. Afterwards, the signal is sampled at a sampling rate of 3840 Hz. Next, the sampled signal is decomposed into EMs by EWT for feature extraction. Later, the extracted features, along with the three-phase current measurements, are input into three different units for developing fault type, phase, and location information. Finally, based on the developed fault information, a trip signal is sent to the appropriate circuit breaker to isolate the faulty section from the rest of the MG.
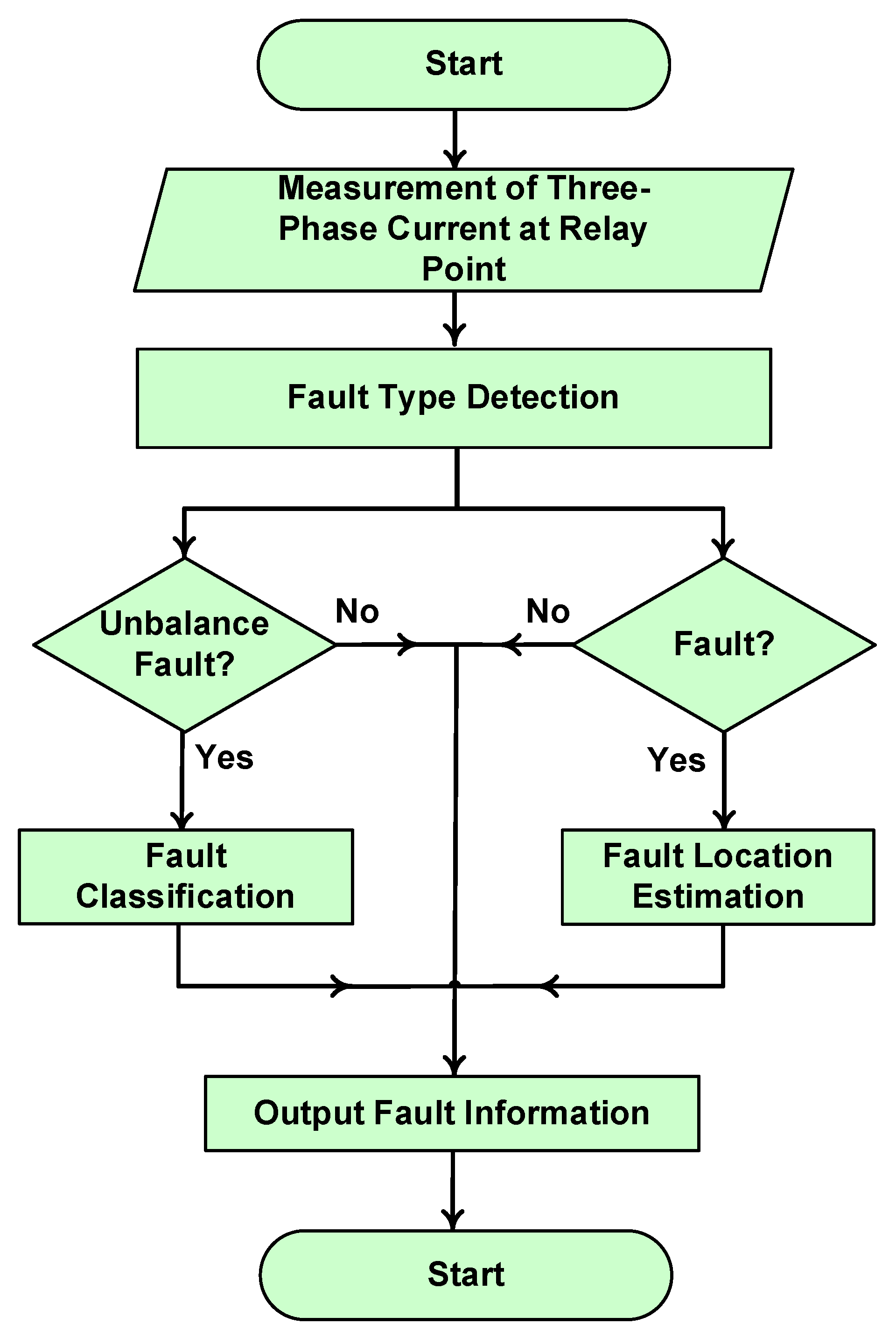
The flow chart of the proposed NIPS is given in
Figure 4. The proposed FIPS has four key stages: signal measurement; fault type detection (FTD); fault classification; and fault location estimation. The subsequent subsections explain each stage of the proposed NIPS in detail.
4.1. Fault Type Detection Unit
The FTD unit is responsible for detecting the fault type in the MGs. The schematic diagram of the FTD unit is shown in
Figure 5. This input of this unit is the three-phase current which is classified among no-fault, three-phase fault, and unbalanced fault at the output. Each output has a 0/1 value, which denotes the status of outputs according to the following equation:
where
FDTm denotes the output status of the
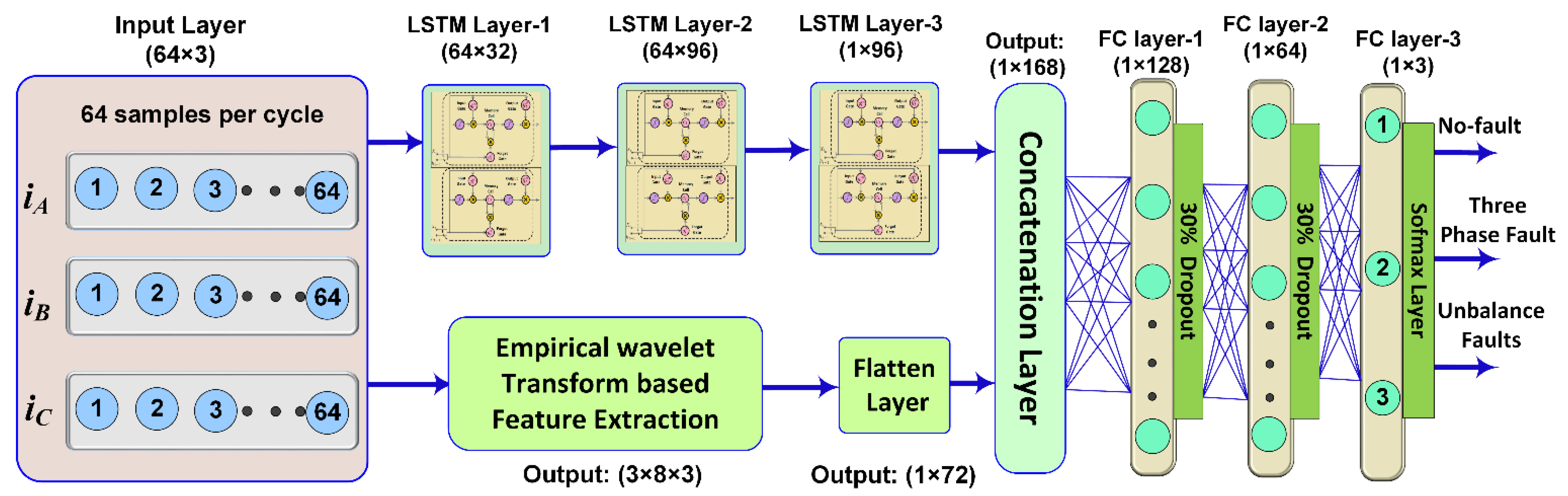
mth fault type. The FTD unit employs three LSTM layers for temporal feature extraction and EWT for statistical feature extraction from the three-phase current signal. Among the three LSTM layers, the first layer maps the time-domain current signal into higher dimension space, whereas the next two layers are used to extract the long and short-term temporal dependencies. These LSTM layers are constructed using LSTM memory units. The dimensions of the layers are selected based on the number of input samples and the number of hidden neurons. After extracting features, a depth concatenation layer is used to combine LSTM-based features with EWT-based features. Afterwards, the features are abstracted by three FC layers. The number of hidden neurons in the first two FC layers is selected by performing extensive simulations, whereas the three hidden neurons are used in the last FC layer (which corresponds to three outputs). To avoid the risk of over-fitting, a dropout layer is employed after the first two FC layers, which exclude some features (30% in this study). The excluded features do not contribute to the output estimation. Lastly, a Softmax layer is used, which provides the most probable fault type at the output.
4.2. Fault Classification Unit
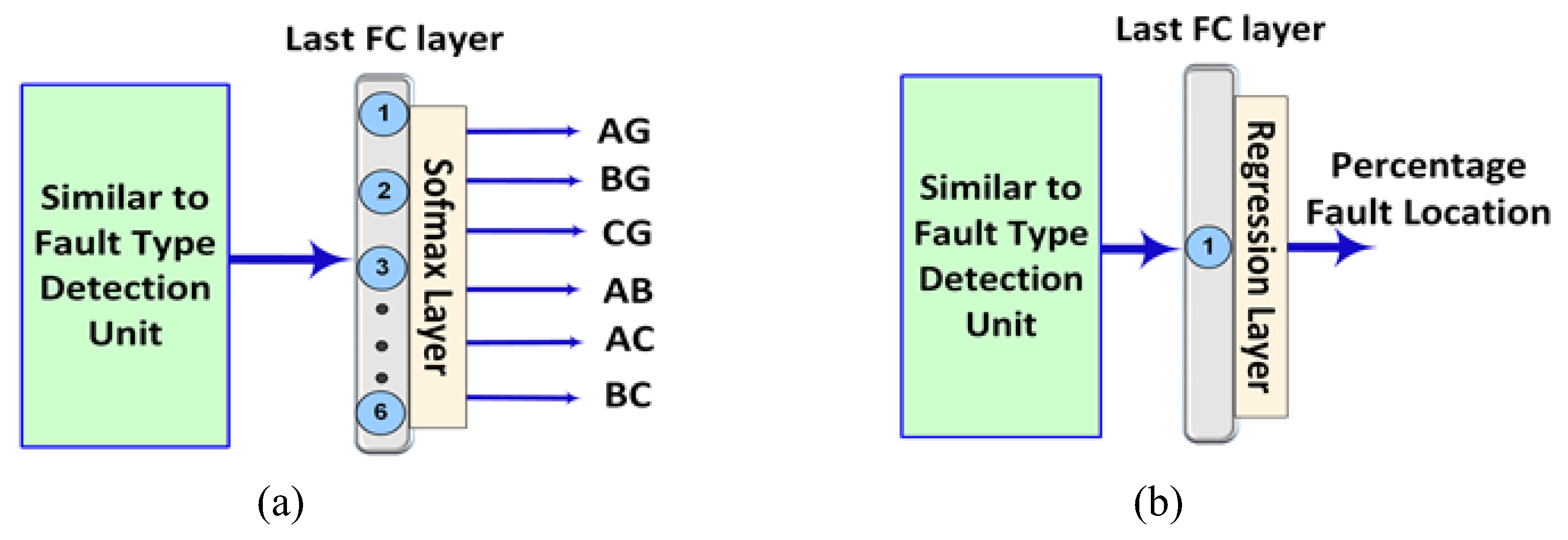
The fault type detection unit classifies the input signal among no-fault, three-phase fault, and unbalanced fault conditions. If the fault is detected as an unbalanced fault, then the fault classification unit is triggered. The fault classification unit employs LSTM and FC layers for fault classification. The structure of the fault classification unit is similar to that shown in
Figure 5, except for the last FC layer. The block diagram of the modified structure is shown in
Figure 6a. The last FC layer of the fault classification unit has six neurons, which corresponds to six unbalance faults. Each output has 0–1 indicators, which represent the status of each unbalance fault.
The fault classification unit works only for asymmetrical faults and classifies the input three-phase current into one of the six unbalanced faults.
4.3. Fault Location Estimation Unit
To reduce the blackout time and to increase the system repair, the precise location of the fault is important. The fault location estimation unit is developed to obtain the exact fault location in the proposed NIPS. This unit is triggered only if the fault type detection unit detects a three-phase or unbalanced fault in a MG. The fault location estimation unit also has a similar structure to that of the fault type detection unit except for the last FC layer and Softmax layer. The modified structure is shown in
Figure 6b. The last FC layer in this unit has only one neuron as the regression layer relates the input data sample to continuous value. The objective function to be optimized during the training process of a network with a regression layer is the mean square error (MSE). The MSE can be calculated by using the following equation:
Here, MSE denotes the mean square error, n is the number of training samples, is the actual fault location and is the estimated location.
The fault location estimation unit uses a three-phase current at its input and maps it to one output. The output specifies the estimated percentage location of a fault in the MGs from the relay point.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}