
Modified Cascaded Controller Design Constructed on Fractional Operator ‘β’ to Mitigate Frequency Fluctuations for Sustainable Operation of Power Systems

 ,
,  , ,
, , 
Abstract
1. Introduction
Novelty and Contribution
- The aim of the proposed research was to improve the ability of the existing cascaded controller to highlight rapid response under load perturbation to deal with frequency fluctuations.
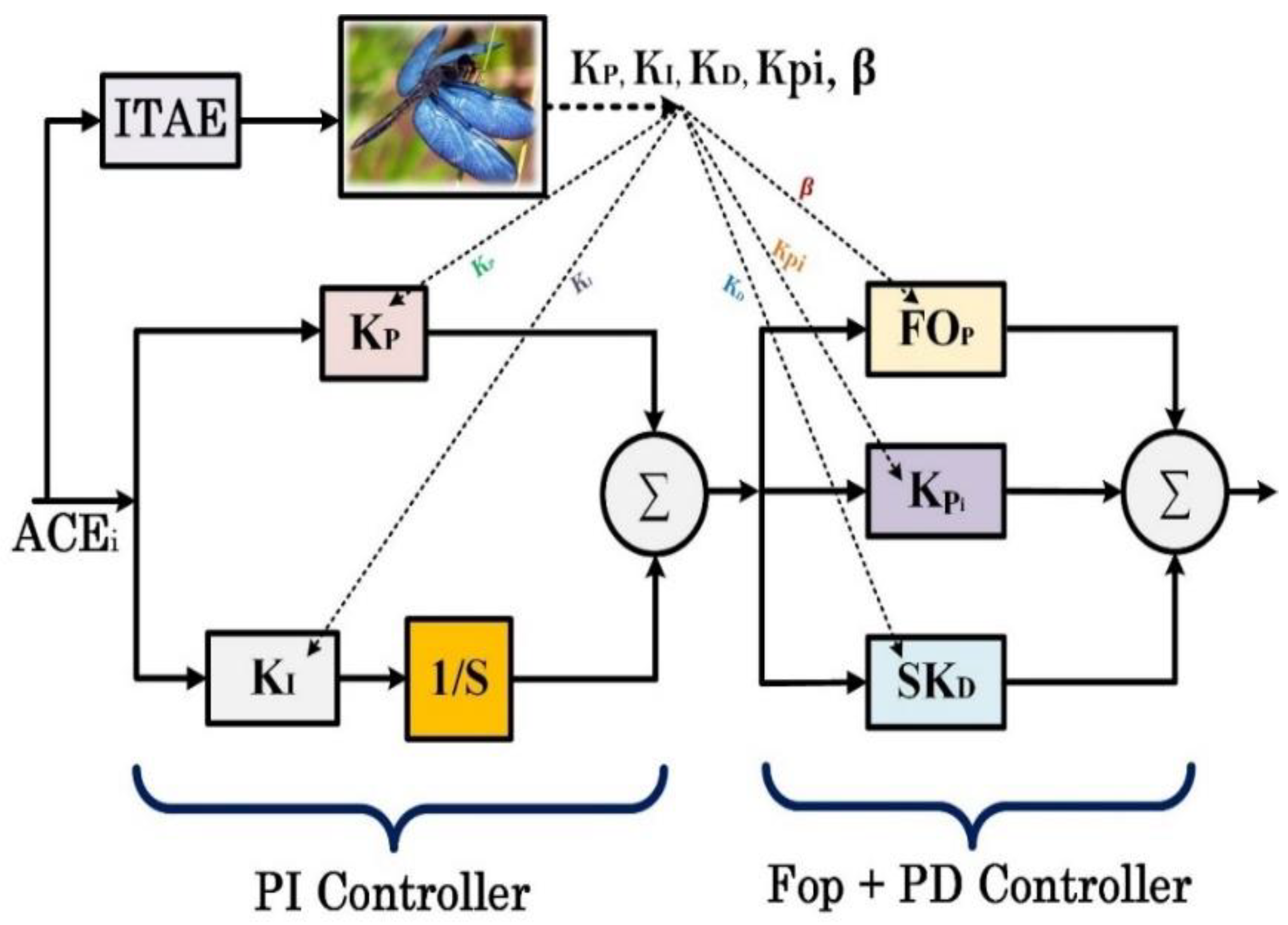
- The existing cascaded controller design PI-(1+PD) is modified to improve its efficiency. In PI-(1+PD), the factor one (1) is altered in the proposed design to achieve fast convergence. The factor one (1) in PI-(1+PD) is translated in terms of a fractional operator based on the input signal that helps to expedite the controller performance with low complexity. The tunable parameters of the proposed controller are extracted from DSA, and the proposed controller design is translated as PI-(FO_P+PD).
- The testation of the proposed controller is scrutinized keeping a high penetration level of RES along with the energy storage system (ESS), where comparative performance assessment is evaluated through state-of-the-art control techniques.
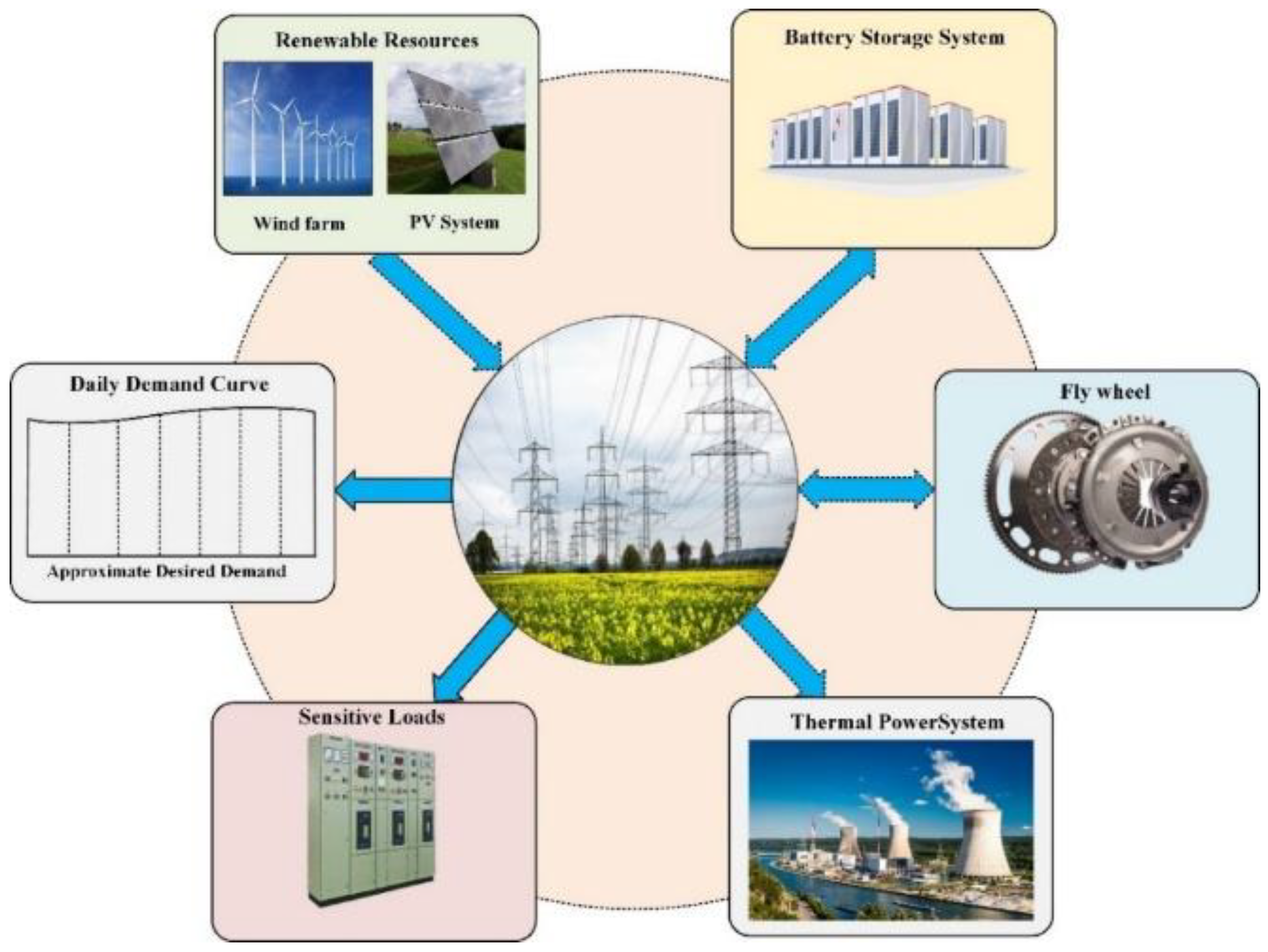
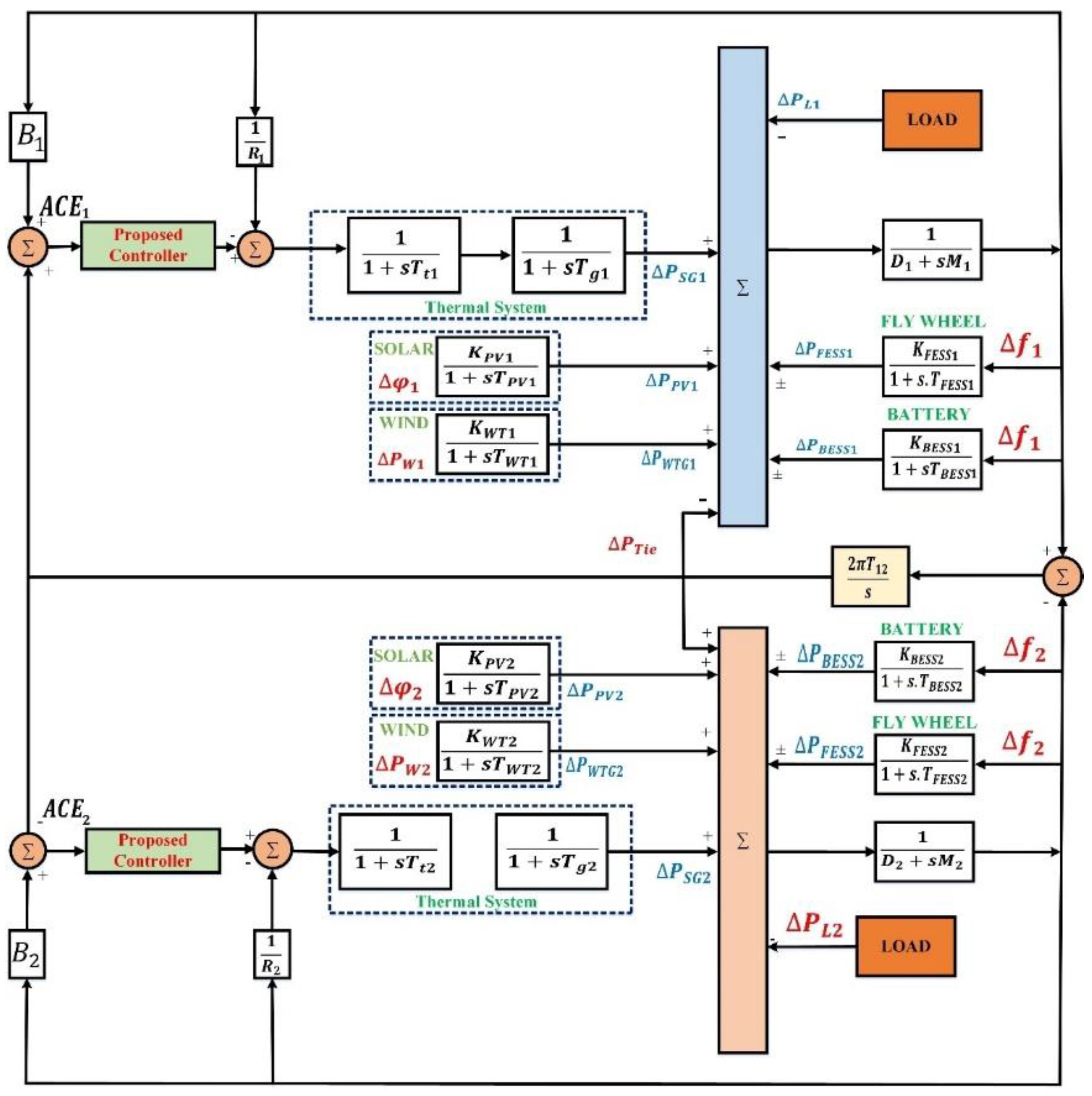
- Developing a multi-area hybrid interconnected area including PV, wind, flywheel, battery ESS, and thermal system.
- Hierarchy for PI-(FO_P+PD) is designed to counter the LFC problem.
- The proposed controller is investigated by applying changing load and time delay in the power system.
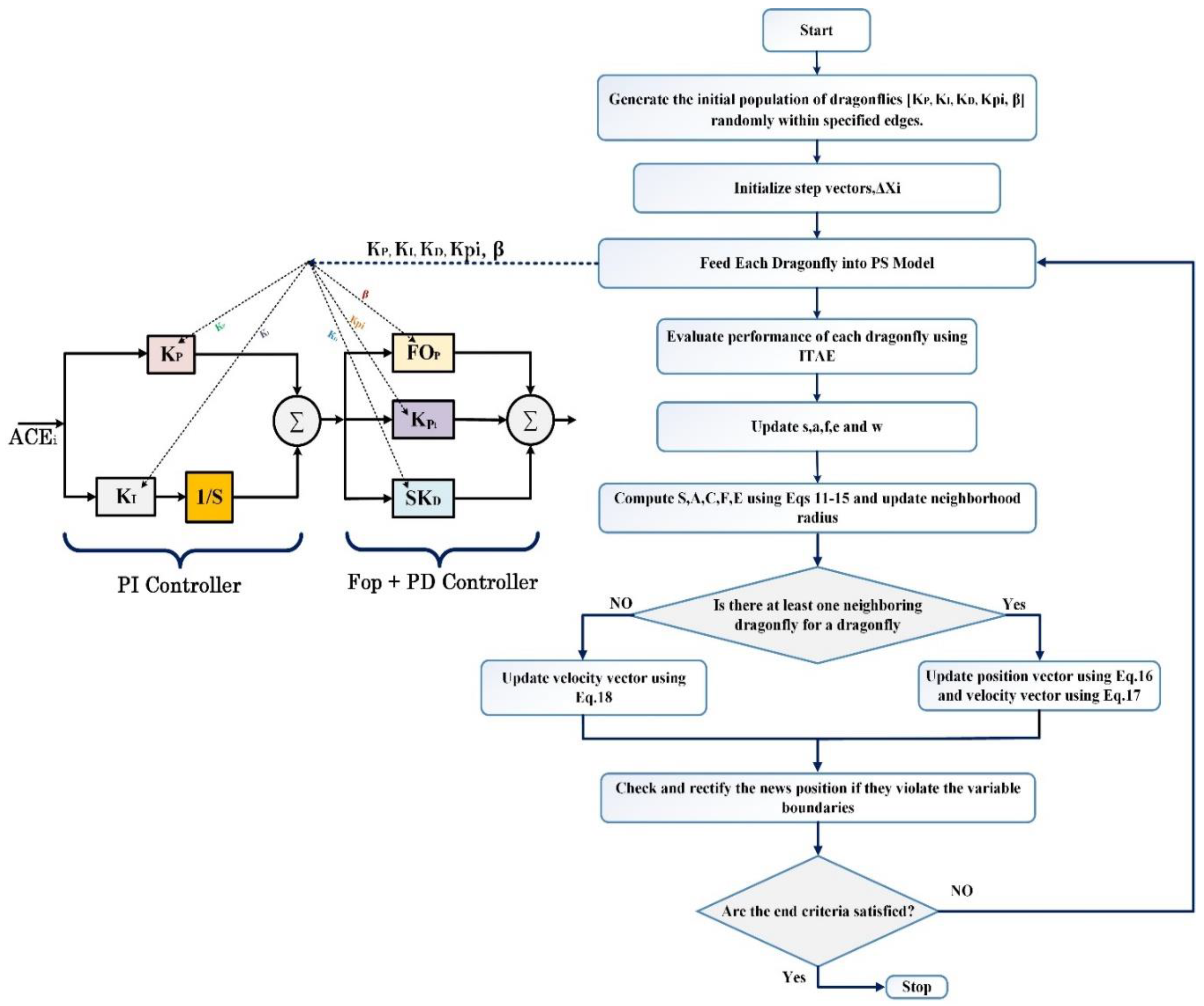
- The optimum parameters for the PI-(FO_P+PD) controller are extracted from DSA.
2. System Modeling
2.1. Thermal System Design
- denotes the frequency bias factor parameter.
- is the generator output.
2.2. Photovoltaic Model
2.3. Wind Turbine Generator Model
2.4. Battery Energy Storage System
2.5. Flywheel for Energy Storage System
3. Proposed Cascaded Design
Dragonfly Search Algorithm
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dyak, A.A.; Alsafasfeh, Q.; Harb, A. Stability analysis of connected large-scale renewable energy sources into Jordanian national power grid. Int. J. Ambient. Energy 2018, 42, 1016–1025. [Google Scholar]
- Gui, Y.; Blaabjerg, F.; Wang, X.; Bendtsen, J.D.; Yang, D.; Stoustrup, J. Improved DC-Link Voltage Regulation Strategy for Grid-Connected Converters. IEEE Trans. Ind. Electron. 2020, 68, 4977–4987. [Google Scholar] [CrossRef]
- Gao, S.; Zhao, H.; Gui, Y.; Zhou, D.; Blaabjerg, F. An Improved Direct Power Control for Doubly Fed Induction Generator. IEEE Trans. Power Electron. 2020, 36, 4672–4685. [Google Scholar] [CrossRef]
- Khezri, R.; Oshnoei, A.; Oshnoei, S.; Bevrani, H.; Muyeen, S. An intelligent coordinator design for GCSC and AGC in a two-area hybrid power system. Appl. Soft Comput. 2019, 76, 491–504. [Google Scholar] [CrossRef]
- Usman Khan, F.; Gulzar, M.M.; Sibtain, D.; Usman, H.M.; Hayat, A. Variable step size fractional incremental conductance for MPPT under changing atmospheric conditions. Int. J. Numer. Model. Electron. Netw. Devices Fields 2020, 33, e2765. [Google Scholar] [CrossRef]
- Chen, C.; Zhang, K.; Yuan, K.; Gao, Z.; Teng, X.; Ding, Q. Disturbance rejection-based LFC for multi-area parallel interconnected AC/DC system. IET Gener. Transm. Distrib. 2016, 10, 4105–4117. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Iqbal, M.; Shahzad, S.; Muqeet, H.A.; Shahzad, M.; Hussain, M.M. Load Frequency Control (LFC) Strategies in Renewable Energy-Based Hybrid Power Systems: A Review. Energies 2022, 15, 3488. [Google Scholar] [CrossRef]
- Bayu, E.S.; Khan, B.; Ali, Z.M.; Alaas, Z.M.; Mahela, O.P. Mitigation of Low-Frequency Oscillation in Power Systems through Optimal Design of Power System Stabilizer Employing ALO. Energies 2022, 15, 3809. [Google Scholar] [CrossRef]
- Hanan; Muhammad; Ai, X.; Javed, M.Y.; Gulzar, M.M.; Ahmad, S. A two-stage algorithm to harvest maximum power from photovoltaic system. In Proceedings of the 2018 2nd IEEE Conference on Energy Internet and Energy System Integration (EI2), Beijing, China, 20–22 October 2018; pp. 1–6. [Google Scholar]
- Qi, B.; Hasan, K.N.; Milanovic, J.V. Identification of Critical Parameters Affecting Voltage and Angular Stability Considering Load-Renewable Generation Correlations. IEEE Trans. Power Syst. 2019, 34, 2859–2869. [Google Scholar] [CrossRef]
- Kim, C.; Gui, Y.; Chung, C.C. Coordinated wind power plant control for frequency support under wake effects. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5. [Google Scholar]
- Shahid, K.; Nainar, K.; Olsen, R.L.; Iov, F.; Lyhne, M.; Morgante, G. On the Use of Common Information Model for Smart Grid Applications—A Conceptual Approach. IEEE Trans. Smart Grid 2021, 12, 5060–5072. [Google Scholar] [CrossRef]
- Shahid, K.; Altin, M.; Mikkelsen, L.M.; Olsen, R.L.; Iov, F. ICT Based Performance Evaluation of Primary Frequency Control Support from Renewable Power Plants in Smart Grids. Energies 2018, 11, 1329. [Google Scholar] [CrossRef]
- Lee, W.-G.; Nguyen, T.-T.; Kim, H.-M. Multiagent-Based Distributed Coordination of Inverter-Based Resources for Optimal Operation of Microgrids Considering Communication Failures. Energies 2022, 15, 3736. [Google Scholar] [CrossRef]
- Abd-Elazim, S.M.; Ali, E.S. Firefly algorithm-based load frequency controller design of a two-area system composing of PV grid and thermal generator. Electr. Eng. 2018, 100, 1253–1262. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Rizvi, S.T.H.; Javed, M.Y.; Sibtain, D.; Din, R.S.U. Mitigating the Load Frequency Fluctuations of Interconnected Power Systems Using Model Predictive Controller. Electronics 2019, 8, 156. [Google Scholar] [CrossRef]
- Sahin, S.; Ayasun, S. Stability region in the parameter space of PI controller for a single-area load frequency control system with time delay. IEEE Trans. Power Syst. 2015, 31, 829–830. [Google Scholar]
- Paliwal, N.; Srivastava, L.; Pandit, M. PSO-Based PID Controller Designing for LFC of Single Area Electrical Power. In Nature Inspired Optimization for Electrical Power System; Springer: Singapore, 2020; pp. 43–54. [Google Scholar]
- Abdelaziz, A.Y.; Ali, E.S. Load frequency controller design via artificial cuckoo search algorithm. Electr. Power Compon. Syst. 2016, 44, 90–98. [Google Scholar] [CrossRef]
- Nguyen, G.N.; Jagatheesan, K.; Ashour, A.S.; Anand, B.; Dey, N. Ant colony optimization based load frequency control of multi-area interconnected thermal power system with governor dead-band nonlinearity. In Smart Trends in Systems, Security and Sustainability; Springer: Singapore, 2018; pp. 157–167. [Google Scholar]
- Dhillon, S.S.; Lather, J.S.; Wang, G.-G.; Kaur, P.; Kumar, L. Monarch butterfly optimized control with robustness analysis for grid tied centralized and distributed power generations. J. Ambient Intell. Humaniz. Comput. 2020, 13, 3595–3608. [Google Scholar] [CrossRef]
- Jagatheesan, K.; Anand, B.; Samanta, S. Flower Pollination Algorithm Tuned PID Controller for Multi-source Interconnected Multi-area Power System. Appl. Flower Pollinat. Algorithm Its Var. 2021, 221–239. [Google Scholar]
- Padhy, S.; Panda, S. A hybrid stochastic fractal search and pattern search technique based cascade PI-PD controller for automatic generation control of multi-source power systems in presence of plug in electric vehicles. CAAI Trans. Intell. Technol. 2017, 2, 12–25. [Google Scholar] [CrossRef]
- Jayabarathi, T.; Raghunathan, T.; Gandomi, A.H. The bat algorithm, variants and some practical engineering applications: A review. Nat.-Inspired Algorithms Appl. Optim. 2018, 744, 313–330. [Google Scholar]
- Mishra, S.; Gupta, S.; Yadav, A. Design and application of controller based on sine-cosine algorithm for load frequency control of power system. In International Conference on Intelligent Systems Design and Applications; Springer: Cham, Switzerland, 2018; pp. 301–311. [Google Scholar]
- Satapathy, P.; Debnath, M.K.; Mohanty, P.K. Design of PD-PID controller with double derivative filter for frequency regulation. In Proceedings of the 2018 2nd IEEE International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 22–24 October 2018; pp. 1142–1147. [Google Scholar]
- Latif, A.; Hussain, S.S.; Das, D.C.; Ustun, T.S. Double stage controller optimization for load frequency stabilization in hybrid wind-ocean wave energy based maritime microgrid system. Appl. Energy 2021, 282, 116171. [Google Scholar] [CrossRef]
- Emre, Ç. Design of new fractional order PI–fractional order PD cascade controller through dragonfly search algorithm for advanced load frequency control of power systems. Soft Comput. 2021, 25, 1193–1217. [Google Scholar]
- Oladipo, S.; Sun, Y.; Wang, Z. Application of a New Fusion of Flower Pollinated With Pathfinder Algorithm for AGC of Multi-Source Interconnected Power System. IEEE Access 2021, 9, 94149–94168. [Google Scholar] [CrossRef]
- Khokhar, B.; Dahiya, S.; Singh Parmar, K.P. A robust Cascade controller for load frequency control of a standalone microgrid incorporating electric vehicles. Electr. Power Compon. Syst. 2020, 48, 711–726. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Sibtain, D.; Murtaza, A.F.; Murawwat, S.; Saadi, M.; Jameel, A. Adaptive fuzzy based optimized proportional-integral controller to mitigate the frequency oscillation of multi-area photovoltaic thermal system. Int. Trans. Electr. Energy Syst. 2021, 31, e12643. [Google Scholar] [CrossRef]
- Chowdhury, A.H.; Asaduz-Zaman, M. Load frequency control of multi-microgrid using energy storage system. In 8th International Conference on Electrical and Computer Engineering; IEEE: Dhaka, Bangladesh, 2014; pp. 548–551. [Google Scholar]
- Iqbal, M.; Gulzar, M.M. Mastger-slave design for frequency regulation in hybrid power system under complex environment. IET Renew. Power Gener. 2022, 1–17. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DSA | |
|---|---|
| Max-iteration | |
| Controllers | Area-1 | Area-2 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1% | 2.5% | 1% | 2.5% | |||||||||
| Proposed | ||||||||||||
| DSA-FOPID [20] | ||||||||||||
| GWO: PI-PD [19] | ||||||||||||
| FA-PI [7] | 21.31 | |||||||||||
| Controllers | Area-1 | Area-2 | ||||
|---|---|---|---|---|---|---|
| DSA: PI-(FOp+PD) | 1.501 | |||||
| DSA-FOPID [20] | ||||||
| GWO: PI-PD [19] | ||||||
| FA-PI [7] | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gulzar, M.M.; Murawwat, S.; Sibtain, D.; Shahid, K.; Javed, I.; Gui, Y. Modified Cascaded Controller Design Constructed on Fractional Operator ‘β’ to Mitigate Frequency Fluctuations for Sustainable Operation of Power Systems. Energies 2022, 15, 7814. https://doi.org/10.3390/en15207814
Gulzar MM, Murawwat S, Sibtain D, Shahid K, Javed I, Gui Y. Modified Cascaded Controller Design Constructed on Fractional Operator ‘β’ to Mitigate Frequency Fluctuations for Sustainable Operation of Power Systems. Energies. 2022; 15(20):7814. https://doi.org/10.3390/en15207814
Chicago/Turabian StyleGulzar, Muhammad Majid, Sadia Murawwat, Daud Sibtain, Kamal Shahid, Imran Javed, and Yonghao Gui. 2022. "Modified Cascaded Controller Design Constructed on Fractional Operator ‘β’ to Mitigate Frequency Fluctuations for Sustainable Operation of Power Systems" Energies 15, no. 20: 7814. https://doi.org/10.3390/en15207814
APA StyleGulzar, M. M., Murawwat, S., Sibtain, D., Shahid, K., Javed, I., & Gui, Y. (2022). Modified Cascaded Controller Design Constructed on Fractional Operator ‘β’ to Mitigate Frequency Fluctuations for Sustainable Operation of Power Systems. Energies, 15(20), 7814. https://doi.org/10.3390/en15207814