
Characterization of Rotational Magnetic Properties of Amorphous Metal Materials for Advanced Electrical Machine Design and Analysis

 ,
,  , ,
, ,  ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Measurement of Rotational Magnetic Properties of Amorphous Magnetic Materials
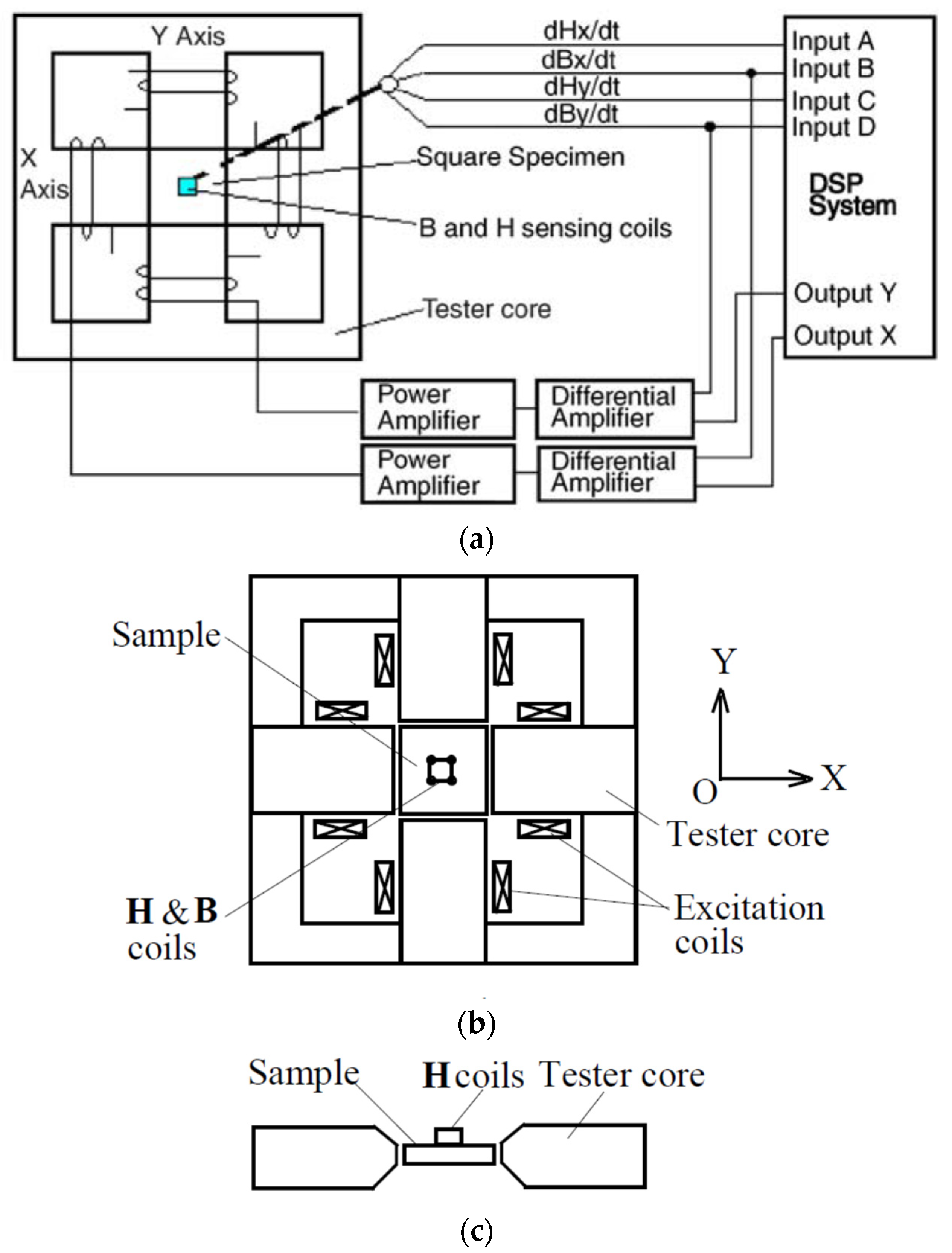
2.1. Measuring System of 2D Magnetic Properties
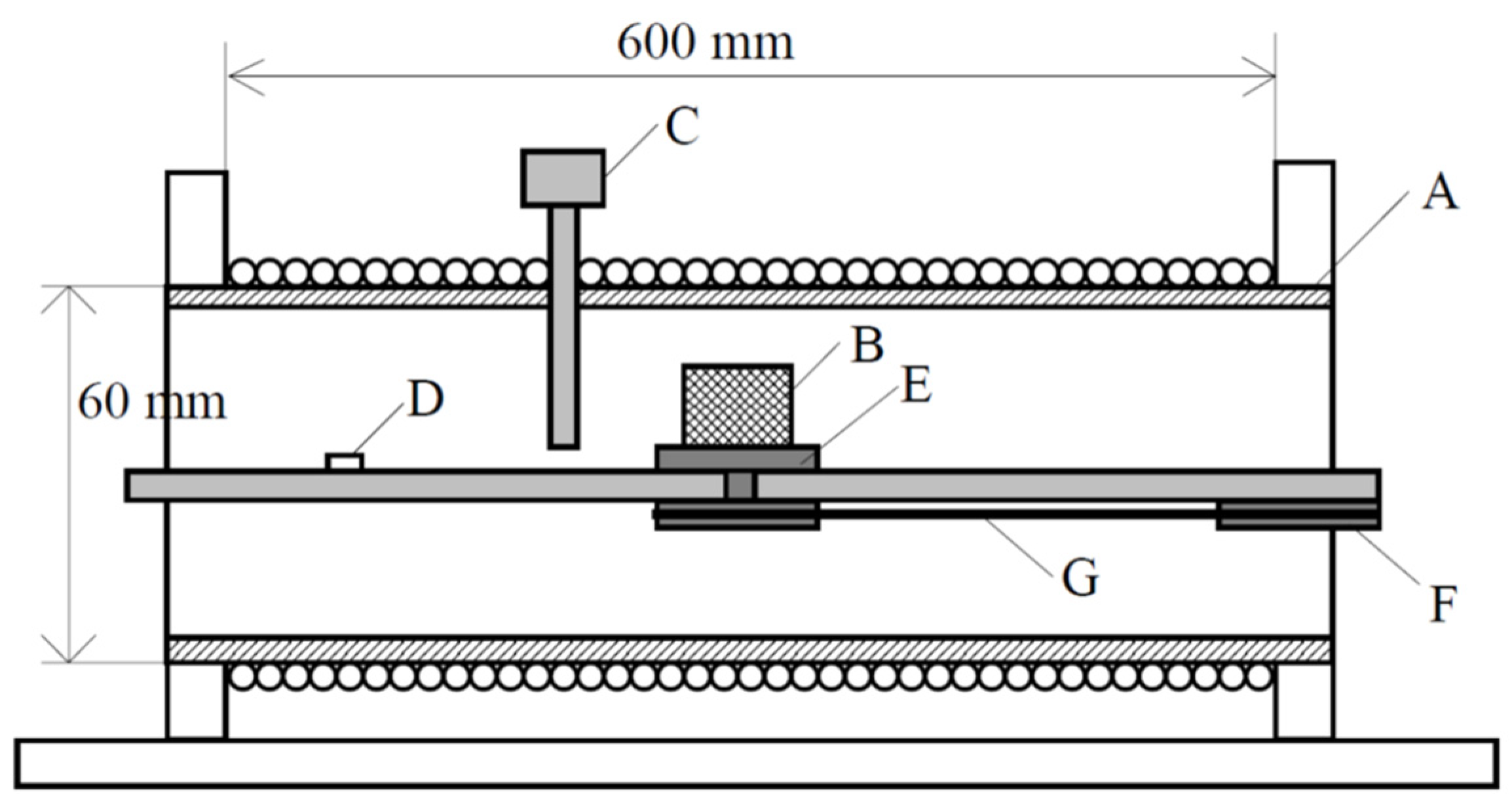
2.2. Material Sample for 2D Measurement
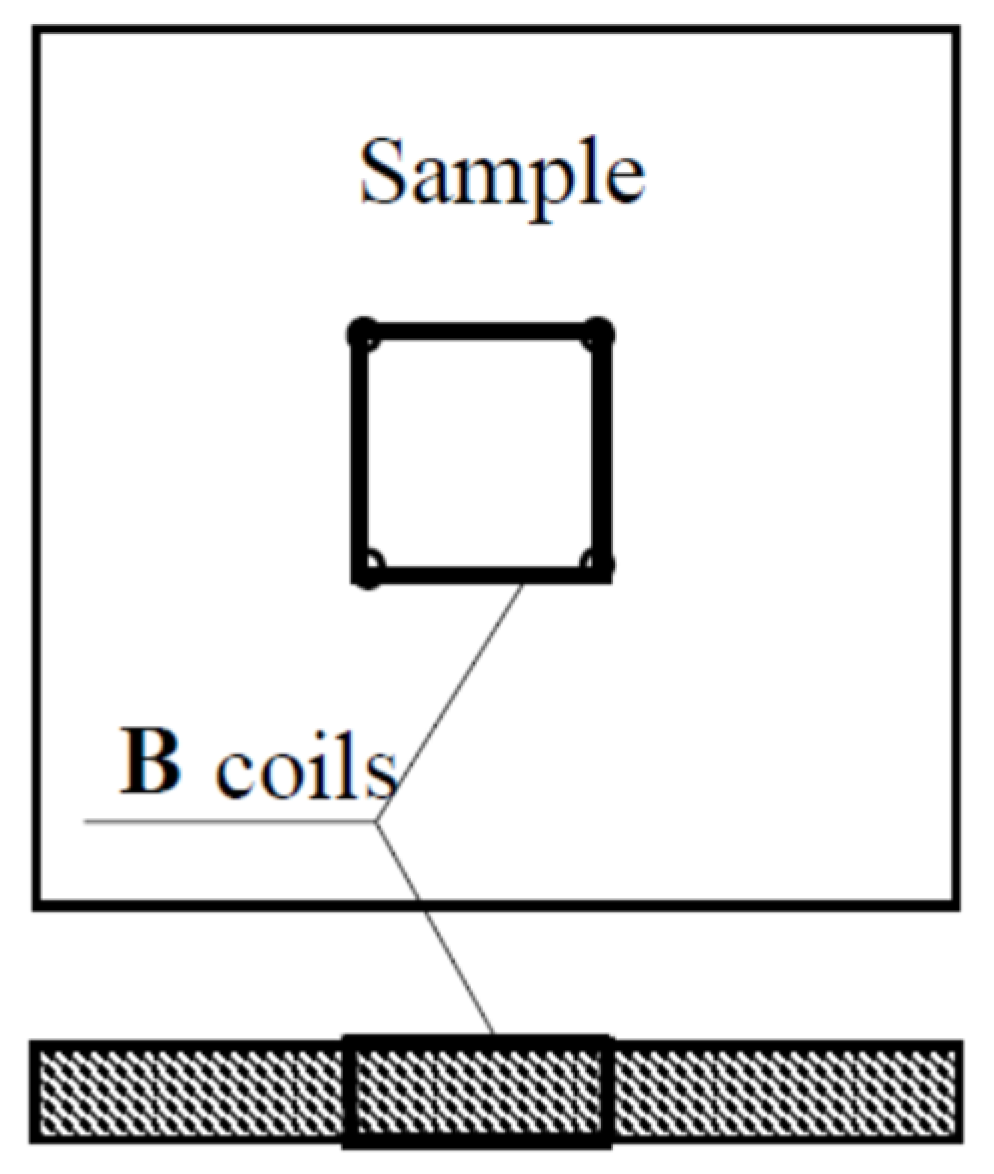
2.3. Measurement of 2D Magnetic Field
2.4. Measurement of Rotational Core Loss
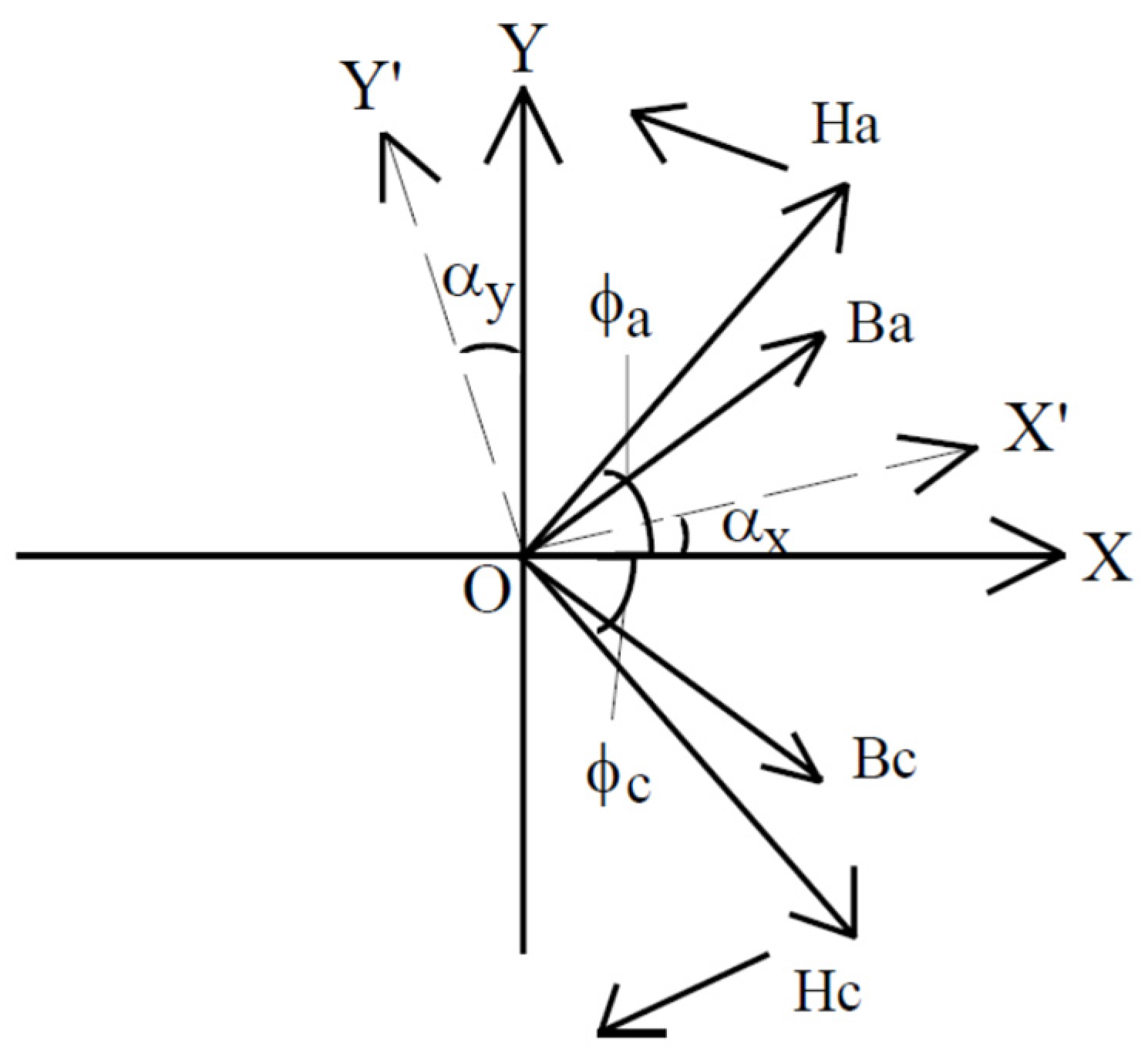
2.5. Correction of Sensing Coil Misalighnment
2.6. Correction of 2D Mesaurement with Rotating Excitations
2.6.1. Correction of H Loci
2.6.2. Correction of Rotational Core Losses
2.7. 2D Mesaurement of the Fe-Based Amorphous Metal Materials with Rotating Excitations
3. Modeling of Rotational Magnetic Properties
3.1. Modeling of B-H Relations under Rotational Magnetization
3.2. Modeling of Core Losse under Rotational Magnetization
4. Application of Rotational Magnetic Properties for Electrical Machine Analysis
5. Conclusions and Future Directions
5.1. Standard and Systematic Measurement of AM Properties under Rotational Magnetization
5.2. Appropriate Modeling of Rotational Magnetic Properties
5.3. Dynamic Modeling Considering the Effects of Multi-Factors on Magnetic Properties
5.4. Magnetic Properties under 3D Rotational Magnetization
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhu, Z.Q.; Howe, D. Electrical Machines and Drives for Electric, Hybrid, and Fuel Cell Vehicles. Proc. IEEE 2007, 95, 746–765. [Google Scholar] [CrossRef]
- Sun, X.; Shi, Z.; Lei, G.; Guo, Y.; Zhu, J. Analysis and Design Optimization of a Permanent Magnet Synchronous Motor for a Campus Patrol Electric Vehicle. IEEE Trans. Veh. Technol. 2019, 68, 10535–10544. [Google Scholar] [CrossRef]
- Ritari, A.; Vepsäläinen, J.; Kivekäs, K.; Tammi, K.; Laitinen, H. Energy Consumption and Lifecycle Cost Analysis of Electric City Buses with Multispeed Gearboxes. Energies 2020, 13, 2117. [Google Scholar] [CrossRef]
- Guo, Y.G.; Jin, J.X.; Zhu, J.G.; Lu, H.Y. Design and Analysis of a Prototype Linear Motor Driving System for HTS Maglev Transportation. IEEE Trans. Appl. Supercond. 2007, 17, 2087–2090. [Google Scholar]
- Reusser, C.A.; Young, H. Full Electric Ship Propulsion based on a Flying Capacitor Converter and an Induction Motor Drive. In Proceedings of the International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles, Aachen, Germany, 3–5 March 2015; pp. 170–176. [Google Scholar]
- Tom, L.; Khowja, M.; Vakil, G.; Gerada, C. Commercial Aircraft Electrification—Current State and Future Scope. Energies 2021, 14, 8381. [Google Scholar] [CrossRef]
- Masson, P.; Luongo, C. High Power Density Superconducting Motor for All-Electric Aircraft Propulsion. IEEE Trans. Appl. Supercond. 2005, 15, 2226–2229. [Google Scholar] [CrossRef]
- Jin, J.X.; Zheng, L.; Guo, Y.; Zhu, J.G.; Grantham, C.; Sorrell, C.C.; Xu, W. High-Temperature Superconducting Linear Synchronous Motors Integrated with HTS Magnetic Levitation Components. IEEE Trans. Appl. Supercond. 2012, 22, 5202617. [Google Scholar]
- Enokizono, M.; Wakabayashi, D.; Soda, N.; Tsuchida, Y.; Ueno, S.; Oka, M. High Power Density and High Efficiency of High-Speed Motor. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; pp. 170–176. [Google Scholar]
- Guo, Y.; Zhu, J.G.; Dorrell, D.G. Design and Analysis of a Claw Pole Permanent Magnet Motor with Molded SMC Core. IEEE Trans. Magn. 2009, 45, 4582–4585. [Google Scholar]
- Liu, C.; Lei, G.; Wang, T.; Guo, Y.; Wang, Y.; Zhu, J. Comparative Study of Small Electrical Machines with Soft Magnetic Composite Cores. IEEE Trans. Ind. Electron. 2016, 64, 1049–1060. [Google Scholar] [CrossRef]
- Du, W.; Zhao, S.; Zhang, H.; Zhang, M.; Gao, J. A Novel Claw Motor with Soft Magnetic Composites. IEEE Trans. Magn. 2021, 57, 8200904. [Google Scholar] [CrossRef]
- Johnson, L.A.; Cornell, E.P.; Bailey, D.J.; Hegyi, S.M. Application of Low Loss Amorphous Metals in Motors and Transformers. IEEE Trans. Power Appar. Syst. 1982, 7, 2109–2114. [Google Scholar] [CrossRef]
- Fukao, T.; Chiba, A.; Matsui, M. Test results on a super-high-speed amorphous-iron reluctance motor. IEEE Trans. Ind. Appl. 1989, 25, 119–125. [Google Scholar] [CrossRef]
- Jensen, C.C.; Profumo, F.; Lipo, T.A. A Low-Loss Permanent-Magnet Brushless DC Motor Utilizing Tape Wound Amorphous Iron. IEEE Trans. Magn. 1992, 28, 646–651. [Google Scholar] [CrossRef]
- Dehlinger, N.; Dubois, M.R. Clawpole Transverse Flux Machines with Amorphous Stator Cores. In Proceedings of the 2008 18th International Conference on Electrical Machines, Vilamoura, Portugal, 6–9 September 2008; pp. 1–6. [Google Scholar]
- Wang, Z.; Enomoto, Y.; Masaki, R.; Souma, K.; Itabashi, H.; Tanigawa, S. Development of a High Speed Motor Using Amorphous Metal Cores. In Proceedings of the 8th International Conference on Power Electronics-ECCE Asia, Jeju, Korea, 30 May–3 June 2011; pp. 1940–1945. [Google Scholar]
- Kolano, R.; Krykowski, K.; Kolano-Burian, A.; Polak, M.; Szynowski, J.; Zackiewicz, P. Amorphous Soft Magnetic Materials for the Stator of a Novel High-Speed PMBLDC Motor. IEEE Trans. Magn. 2012, 49, 1367–1371. [Google Scholar] [CrossRef]
- Fan, T.; Li, Q.; Wen, X. Development of a High Power Density Motor Made of Amorphous Alloy Cores. IEEE Trans. Ind. Electron. 2014, 61, 4510–4518. [Google Scholar] [CrossRef]
- Ertugrul, N.; Hasegawa, R.; Soong, W.L.; Gayler, J.; Kloeden, S.; Kahourzade, S. A Novel Tapered Rotating Electrical Machine Topology Utilizing Cut Amorphous Magnetic Material. IEEE Trans. Magn. 2015, 51, 8106006. [Google Scholar] [CrossRef]
- Tang, R.; Tong, W.; Han, X. Overview on Amorphous Alloy Electrical Machines and Their Key Technologies. Chin. J. Electr. Eng. 2016, 2, 1–12. [Google Scholar]
- Simizu, S.; Ohodnicki, P.R.; McHenry, M.E. Metal Amorphous Nanocomposite Soft Magnetic Material-Enabled High Power Density, Rare Earth Free Rotational Machines. IEEE Trans. Magn. 2018, 54, 8202505. [Google Scholar] [CrossRef]
- Li, Z.; Pei, Y.; Chai, F.; Hu, H.; Wu, Y.; Yu, Y. Accurate Modeling and Performance Analysis of Synchronous Reluctance Motor Considering Amorphous Alloy Properties. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–6. [Google Scholar]
- Ismagilov, F.R.; Papini, L.; Vavilov, V.E.; Gusakov, D.V. Design and Performance of a High-Speed Permanent Magnet Generator with Amorphous Alloy Magnetic Core for Aerospace Applications. IEEE Trans. Ind. Electron. 2020, 67, 1750–1758. [Google Scholar] [CrossRef]
- Fan, Z.; Yi, H.; Xu, J.; Xie, K.; Qi, Y.; Ren, S.; Wang, H. Performance Study and Optimization Design of High-Speed Amorphous Alloy Induction Motor. Energies 2021, 14, 2468. [Google Scholar] [CrossRef]
- Hagihara, H.; Tanaka, M.; Takahashi, Y.; Fujiwara, K.; Ishihara, Y. Standard Measurement Method for Magnetic Properties of Fe-Based Amorphous Magnetic Materials. IEEE Trans. Magn. 2014, 50, 6100604. [Google Scholar] [CrossRef]
- Baily, F.G. The Hysteresis of Iron and Steel in a Rotating Magnetic Field. Philos. Trans. R. Soc. 1896, 187, 715–746. [Google Scholar]
- Sievert, J. Recent Advances in the One- and Two-dimensional Magnetic Measurement Technique for Electrical Sheet Steel. IEEE Trans. Magn. 1990, 26, 2553–2558. [Google Scholar] [CrossRef]
- Guo, Y.; Zhu, J.G.; Zhong, J.; Lu, H.; Jin, J.X. Measurement and Modeling of Rotational Core Losses of Soft Magnetic Materials Used in Electrical Machines: A Review. IEEE Trans. Magn. 2008, 44, 279–291. [Google Scholar]
- Sievert, J. Two-dimensional Magnetic Measurement-History and the Achievements of the Workshop. Przeg. Elektrot. 2011, 87, 2–10. [Google Scholar]
- Brix, W.; Hempel, K.; Schroeder, W. Method for the measurement of rotational power loss and related properties in electrical steel sheets. IEEE Trans. Magn. 1982, 18, 1469–1471. [Google Scholar] [CrossRef]
- Zhu, J.G.; Ramsden, V.S. Two Dimensional Measurement of Magnetic Field and Core Loss Using a Square Specimen Tester. IEEE Trans. Magn. 1993, 29, 2995–2997. [Google Scholar] [CrossRef]
- Sarker, P.C.; Guo, Y.; Lu, H.Y.; Zhu, J.G. Measurement and Modeling of Rotational Core Loss of Fe-Based Amorphous Magnetic Material Under 2-D Magnetic Excitation. IEEE Trans. Magn. 2021, 57, 8402008. [Google Scholar] [CrossRef]
- Brix, W.; Hempel, K.; Schulte, F. Improved method for the investigation of the rotational magnetization process in electrical steel sheets. IEEE Trans. Magn. 1984, 20, 1708–1710. [Google Scholar] [CrossRef]
- Sievert, J. On Measuring the Magnetic Properties of Electrical Sheet under Rotational Magnetization. J. Magn. Magn. Mater. 1992, 112, 50–57. [Google Scholar]
- Zhong, J.J.; Zhu, J.G.; Guo, Y.; Lin, Z.W. A 3-D vector magnetization model with interaction field. IEEE Trans. Magn. 2005, 41, 1496–1499. [Google Scholar] [CrossRef]
- Adly, A.A.; Mayergoyz, I.D. Accurate Modeling of Vector Hysteresis using a Superposition of Preisach-Type Models. IEEE Trans. Magn. 1997, 33, 4155–4157. [Google Scholar] [CrossRef]
- Kahler, G.; Della Torre, E.; Patel, U. Properties of vector preisach models. IEEE Trans. Magn. 2005, 41, 8–16. [Google Scholar] [CrossRef]
- Handgruber, P.; Stermecki, A.; Biro, O.; Gorican, V.; Dlala, E.; Ofner, G. Anisotropic Generalization of Vector Preisach Hysteresis Models for Nonoriented Steels. IEEE Trans. Magn. 2015, 51, 7300604. [Google Scholar] [CrossRef]
- Zhao, X.; Xu, H.; Li, Y.; Zhou, L.; Liu, X.; Zhao, H.; Liu, Y.; Yuan, D. Improved Preisach Model for the Vector Hysteresis Property of Soft Magnetic Composite Materials Based on the Hybrid Technique of SA-NMS. IEEE Trans. Ind. Appl. 2021, 57, 5517–5526. [Google Scholar] [CrossRef]
- Stoner, E.C.; Wohlfarth, E.P. A Mechanism of Magnetic Hysteresis in Heterogenous Alloys. Philos. Trans. R. Soc. Lond. Ser. A Math. Phys. Sci. 1948, 240, 599–642. [Google Scholar]
- Atherton, D.; Beattie, J. A mean field Stoner-Wohlfarth hysteresis model. IEEE Trans. Magn. 1990, 26, 3059–3063. [Google Scholar] [CrossRef]
- Sablik, M.J.; Jiles, D.C. A modified Stoner-Wohlfarth computational model for hysteretic magnetic properties in a ferromagnetic composite rod under torsion. J. Phys. D Appl. Phys. 1999, 32, 1971–1983. [Google Scholar] [CrossRef]
- Xu, W.; Duan, N.; Wang, S.; Guo, Y.; Zhu, J. A Stress-Dependent Magnetic Hysteresis Model for Soft Magnetic Composite Materials. IEEE Trans. Appl. Supercond. 2016, 26, 0611305. [Google Scholar] [CrossRef]
- Koh, C.S.; Hahn, S.-Y.; Park, G.-S. Vector hysteresis modeling by combining Stoner-Wohlfarth and Preisach models. IEEE Trans. Magn. 2000, 36, 1254–1257. [Google Scholar]
- Kahler, G.; Della Torre, E.; Cardelli, E. Implementation of the Preisach-Stoner-Wohlfarth Classical Vector Model. IEEE Trans. Magn. 2009, 46, 21–28. [Google Scholar] [CrossRef]
- Li, W.; Kim, I.H.; Jang, S.M.; Koh, C.S. Hysteresis Modeling for Electrical Steel Sheets Using Improved Vector Jiles-Atherton Hysteresis Model. IEEE Trans. Magn. 2011, 47, 3821–3824. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Y.; Zhang, D.; Ren, Z.; Koh, C.S. Analysis of Rotational Hysteresis Property in a Transformer Core Based on an Inverse Jiles-Atherton Hysteresis Model Coupled with Finite Element Method. In Proceedings of the 2020 23rd International Conference on Electrical Machines and Systems (ICEMS), Hamamatsu, Japan, 24–27 November 2020; pp. 1027–1030. [Google Scholar]
- Soda, N.; Enokizono, M. Improvement of T-joint part constructions in three-phase transformer cores by using direct loss analysis with E&S model. IEEE Trans. Magn. 2000, 36, 1285–1288. [Google Scholar]
- Enokizono, M. Loss Evaluation of Induction Motor by Using Magnetic Hysteresis E&S2 Model. IEEE Trans. Magn. 2002, 38, 2379–2381. [Google Scholar]
- Enokizono, M.; Mori, S.; Benda, O. A treatment of the magnetic reluctivity tensor for rotating magnetic field. IEEE Trans. Magn. 1997, 33, 1608–1611. [Google Scholar] [CrossRef]
- Guo, Y.; Zhu, J.G.; Lin, Z.W.; Zhong, J.J.; Lu, H.Y.; Wang, S. Determination of 3D magnetic reluctivity tensor of soft magnetic composite material. J. Magn. Magn. Mater. 2007, 312, 458–463. [Google Scholar] [CrossRef][Green Version]
- Yoon, H.S.; Eum, Y.H.; Zhang, Y.; Shin, P.-S.; Koh, C.S. Comparison of Magnetic Reluctivity Models for FEA Considering Two-Dimensional Magnetic Properties. IEEE Trans. Magn. 2009, 45, 1202–1205. [Google Scholar] [CrossRef]
- Sun, J.; Yang, Q.; Wang, Y.; Yan, W.; Li, Y. A Finite Element Formulation for Tetrahedral Elements Based on Reluctivity Tensor. IEEE Trans. Appl. Supercond. 2010, 20, 1852–1855. [Google Scholar]
- Guo, Y.; Zhu, J.; Zhong, J. Measurement and modelling of magnetic properties of soft magnetic composite material under 2D vector magnetisations. J. Magn. Magn. Mater. 2005, 302, 14–19. [Google Scholar] [CrossRef]
- Fiorillo, F.; Rietto, A.M. Rotational and Alternating Energy Loss versus Magnetizing Frequency in SiFe Laminations. J. Magn. Magn. Mater. 1993, 83, 46–49. [Google Scholar]
- Guo, Y.; Zhu, J.G.; Zhong, J.J.; Wu, W. Core Losses in Claw Pole Permanent Magnet Machines with Soft Magnetic Composite Stators. IEEE Trans. Magn. 2003, 39, 3199–3201. [Google Scholar]
- Bertotti, G.; Boglietti, A.; Chiampi, M.; Chiarabaglio, D.; Fiorillo, F.; Lazzari, M. An improved estimation of iron losses in rotating electrical machines. IEEE Trans. Magn. 1991, 27, 5007–5009. [Google Scholar] [CrossRef]
- Zhu, J.G.; Ramsden, V. Improved formulations for rotational core losses in rotating electrical machines. IEEE Trans. Magn. 1998, 34, 2234–2242. [Google Scholar]
- Guo, Y.; Zhu, J.; Watterson, P.; Wu, W. Development of a permanent magnet claw pole motor with soft magnetic composite core. Aust. J. Electr. Electron. Eng. 2005, 2, 21–30. [Google Scholar] [CrossRef]
- Guo, Y.; Zhu, J.G.; Watterson, P.A.; Wu, W. Development of a PM Transverse Flux Motor With Soft Magnetic Composite Core. IEEE Trans. Energy Convers. 2006, 21, 426–434. [Google Scholar] [CrossRef]
- Huang, Y.; Zhu, J.; Guo, Y.; Lin, Z.; Hu, Q. Design and Analysis of a High-Speed Claw Pole Motor with Soft Magnetic Composite Core. IEEE Trans. Magn. 2007, 43, 2492–2494. [Google Scholar] [CrossRef]
- Guo, Y.; Zhu, J.; Lu, H.; Lin, Z.; Li, Y. Core Loss Calculation for Soft Magnetic Composite Electrical Machines. IEEE Trans. Magn. 2012, 48, 3112–3115. [Google Scholar] [CrossRef]
- Zhu, J.G.; Ramsden, V.S.; Sievert, J.D. Prediction of Core Loss with Elliptical Flux from Measurements with Alternating and Circular Fluxes in Electrical Steel Sheets. In Elsevier Studies in Applied Electromagnetics in Materials; Elsevier: Amsterdam, The Netherlands, 1994; pp. 675–678. [Google Scholar]
- Enokizono, M.; Shirakawa, G.; Sievert, J. Anomalous anisotropy and rotational magnetic properties of amorphous sheet. J. Magn. Magn. Mater. 1992, 112, 195–199. [Google Scholar] [CrossRef]
- Ueno, S.; Todaka, T.; Enokizono, M. Measurement of Vector Magnetic Properties of Fe-Si-B Amorphous Material. IEEE Trans. Magn. 2011, 47, 3188–3191. [Google Scholar] [CrossRef]
- Liu, G.; Liu, M.; Zhang, Y.; Wang, H.; Gerada, C. High-Speed Permanent Magnet Synchronous Motor Iron Loss Calculation Method Considering Multiphysics Factors. IEEE Trans. Ind. Electron. 2019, 67, 5360–5368. [Google Scholar] [CrossRef]
- Liu, L.; Guo, Y.; Lei, G.; Zhu, J.G. Iron Loss Calculation for High-Speed Permanent Magnet Machines Considering Rotating Magnetic Field and Thermal Effects. IEEE Trans. Appl. Supercond. 2021, 31, 5205105. [Google Scholar] [CrossRef]
- Liu, L.; Ba, X.; Guo, Y.; Lei, G.; Sun, X.; Zhu, J. Improved Iron Loss Prediction Models for Interior PMSMs Considering Coupling Effects of Multiphysics Factors. IEEE Trans. Transp. Electrif. 2022; Early Access. [Google Scholar] [CrossRef]
- Liu, L.; Guo, Y.; Yin, W.; Lei, G.; Zhu, J. Design and Optimization Technologies of Permanent Magnet Machines and Drive Systems Based on Digital Twin Model. Energies 2022, 15, 6186. [Google Scholar] [CrossRef]
- Guo, Y.G.; Zhu, J.G.; Watterson, P.A.; Wu, W. Comparative Study of 3-D Flux Electrical Machines with Soft Magnetic Composite Cores. IEEE Trans. Ind. Appl. 2003, 39, 1689–1696. [Google Scholar]
- Guo, Y.; Zhu, J.; Lin, Z.; Zhong, J. 3D vector magnetic properties of soft magnetic composite material. J. Magn. Magn. Mater. 2005, 302, 511–516. [Google Scholar] [CrossRef]
- Yang, Q.; Li, Y.; Zhao, Z.; Zhu, L.; Luo, Y.; Zhu, J. Design of a 3-D Rotational Magnetic Properties Measurement Structure for Soft Magnetic Materials. IEEE Trans. Appl. Supercond. 2014, 24, 8200804. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; Liu, L.; Ba, X.; Lu, H.; Lei, G.; Sarker, P.; Zhu, J. Characterization of Rotational Magnetic Properties of Amorphous Metal Materials for Advanced Electrical Machine Design and Analysis. Energies 2022, 15, 7798. https://doi.org/10.3390/en15207798
Guo Y, Liu L, Ba X, Lu H, Lei G, Sarker P, Zhu J. Characterization of Rotational Magnetic Properties of Amorphous Metal Materials for Advanced Electrical Machine Design and Analysis. Energies. 2022; 15(20):7798. https://doi.org/10.3390/en15207798
Chicago/Turabian StyleGuo, Youguang, Lin Liu, Xin Ba, Haiyan Lu, Gang Lei, Pejush Sarker, and Jianguo Zhu. 2022. "Characterization of Rotational Magnetic Properties of Amorphous Metal Materials for Advanced Electrical Machine Design and Analysis" Energies 15, no. 20: 7798. https://doi.org/10.3390/en15207798
APA StyleGuo, Y., Liu, L., Ba, X., Lu, H., Lei, G., Sarker, P., & Zhu, J. (2022). Characterization of Rotational Magnetic Properties of Amorphous Metal Materials for Advanced Electrical Machine Design and Analysis. Energies, 15(20), 7798. https://doi.org/10.3390/en15207798